Изобретение относится к способам управления беспилотным летательным аппаратом (далее - БПЛА) и может быть использовано для выполнения ими функции сопровождения наземных материальных объектов (функция «Follow Ме»).
Под материальным объектом понимается - любой существующий объект - человек, автомобиль, животное и т.д. Режим "Follow me"- это режим БПЛА в котором он постоянно следует за оператором на расстоянии - как будто машина находится «на невидимом поводке». Роль такого поводка может играть пульт, постоянно подающий сигнал для ориентации аппарата, смартфон с GPS-модулем, сообщающий квадрокоптеру о нахождении пользователя и т.п. В любом случае режим «Follow me» обеспечивает некоторые интересные возможности - например, автоматическую видеосъемку без необходимости постоянно вести квадрокоптер за собой с пульта (https://www.e-katalog.ru/list/943/pr-21538/). Выполнение данной функции является одним из способов управления БПЛА.
Также известен способ управления БПЛА, согласно которому, для обеспечения полета по заданному маршруту, требуется предварительное задание маршрута в бортовую систему навигации, причем это задание включает указание координат и высоты поворотных пунктов и осуществляется перед началом полета (Иванова И.А. и др. Способы организации управления беспилотными летательными аппаратами. - URL: https://cyberleninka.ru/article/n/sposoby-organizatsii-upravleniva-bespilotnymi-letatelnymi-apparatami/viewer; дата обращения: 30.09.2020). Как правило, БПЛА включает интегрированную навигационную систему, содержащую в том числе приемник спутниковой навигации, обеспечивающий прием навигационной информации, например, от систем ГЛОНАСС и GPS. По известному решению, изменение маршрутного задания вплоть до возвращения в точку старта осуществляется по команде с наземного пункта управления. При этом БПЛА может осуществлять автосопровождение выбранной цели.
К недостаткам известного решения относится сложность конструкции БПЛА, обусловленная наличием высокоточной аппаратуры, и неизбежно приводящей, с одной стороны, к уменьшению надежности БПЛА, как технической системы, и, с другой стороны, к удорожанию изделия в целом. Кроме того, к недостаткам относится необходимость задания исходного маршрута, даже, если заранее известно, что маршрут может или должен быть впоследствии изменен.
Известен способ управления беспилотным летательным аппаратом, при котором команды управления передают через основной спутниковый канал связи со стационарного или подвижного пункта управления, учитывают компенсацию задержки в канале передачи команд управления, определяют динамические характеристики воздействия, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора рабочего места оператора пункта управления (пат. RU №2562890, опубл. 10.09.2015. Бюл. №25). БПЛА оснащен видеокамерой и системой спутниковой связи.
К недостаткам известного решения относится необходимость наличия оборудования, обеспечивающего спутниковую связь, что с одной стороны, к уменьшению надежности БПЛА, как технической системы, и, с другой стороны, к удорожанию изделия в целом.
Известно запатентованное решение компании Xiaomi под названием 'Follow Me', с помощью которого дрон может лететь за объектом съемки, а сам контроль будет осуществляться при помощи всем известного Mi Band (фитнес-браслет). Также говориться, Mi Drone (самое вероятное название) будет достаточно компактным с удобным для переноски, https://4iam.net/news/xiaomi-patent-mi-drone/. Необходимо отметить, что этот контроль также будет осуществляться с помощью радиоканала как и в предыдущем указанном изобретении.
Общим недостатком для приведенных решений - является невозможность работы в условиях плохой радиоэлектронной обстановки (намеренное «зашумления» радиоэфира с помощью блокираторов связи или неблагоприятная обстановка может быть вызвана условиями среды и т.д.).
Технической задачей, на решение которой направлено предлагаемое изобретение, является устранение недостатков: создание системы управления БПЛА, а именно способа выполнения функции «сопровождения» наземного материального объекта беспилотным летательным аппаратом, не зависящей от радиоэлектронной обстановки местности над которым происходит полет.
Поставленная техническая задача решается за счет использования для выполнения функции по сопровождению БПЛА управляющего воздействия: управления маршрутом с использованием оптического маркера, размещенного на подвижном наземном материальном объекте (например, автомобиле или человеке).
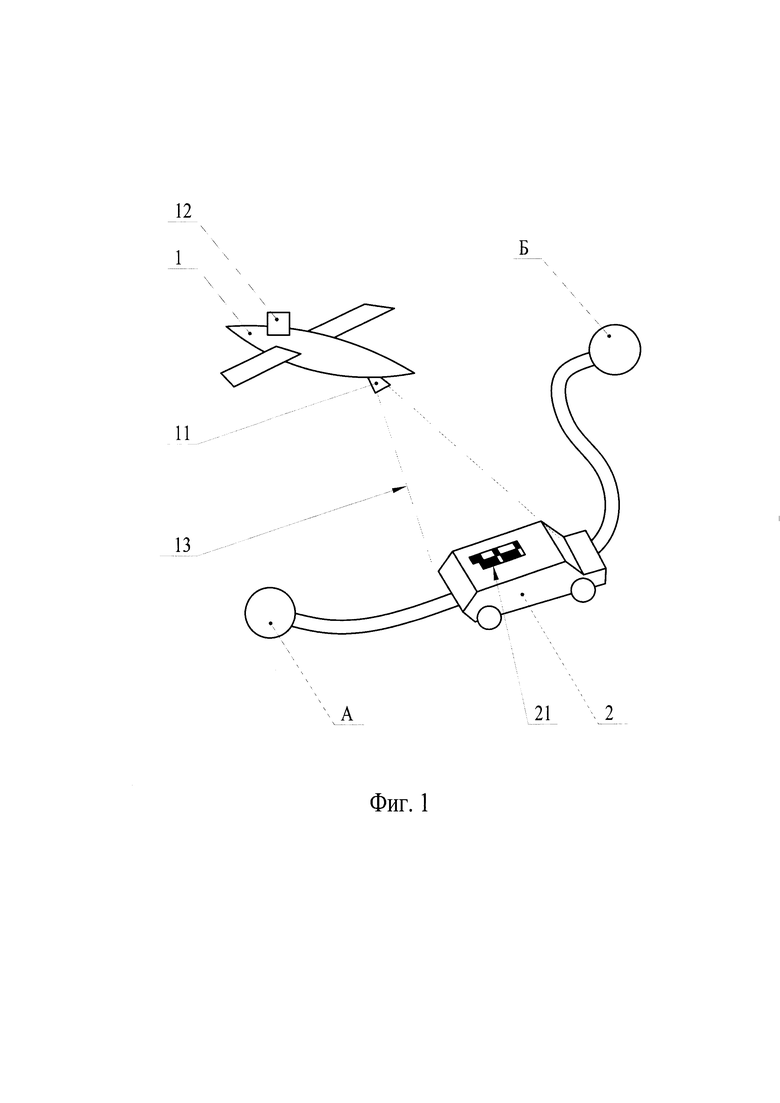
Предлагаемый в качестве изобретения способ управления беспилотным летательным аппаратом поясняется чертежом (фиг. 1), где позициями обозначено: БПЛА - 1 с видеокамерой 11, наземный материальный объект 2, оптический маркер 21.
Конструкция наземного материального объекта 2 не является предметом охраны по настоящей заявке. При сопровождении БПЛА человека, маркер может наноситься, например, на его шлем. При сопровождении автомобиля маркер может наноситься на крышу.
Для маркировки допускается использование штрихкода (qr-кода). Дело в том, что многие современные камеры способны идентифицировать объекты, оснащенные штрихкодами, в автоматическом режиме.
Для увеличение дистанции контроля БПЛА перемещающегося материального объекта в плохо освещенной местности и/или в ночное время рекомендуется оптический маркер изготавливать с помощью люминесцентной краски.
При этом может задаваться за ранее высота БПЛА при сопровождении объекта, также высота может меняться по определенному заданному алгоритму (например, в следствие ухудшения видимости), либо сам оператор может менять высоту любым возможным способом (в том числе и по радиоканалу).
Предлагаемый способ обеспечения функции сопровождения беспилотным летательным аппаратом осуществляется следующим образом.
Пусть БПЛА 1 сопровождает материальный объект от пункта «А» до пункта «Б». На наземном материальном объекте 2 любым известным способом наносят идентифицирующую маркировку, которая будет являться оптическим маркером 21 для БПЛА.
Предпочтительным является нанесение оптического маркера 21 на крышу материального объекта 2. Этот вариант показан на фиг. 1.
БПЛА взлетает в пункте «01» и набирает высоту, заданную изначально в устройство 12, являющееся частью конструкции БПЛА 1, или передаваемое на это устройство любым известным способом.
Наземный материальный объект 2 начинает движение из пункта «А» в пункт «Б». Видеокамера 11, расположенная на БПЛА 1, ведет постоянное отслеживание оптического маркера 21. На фиг. 1 конус 13 символизирует поле зрения видеокамеры 11. Вычисление необходимых поправок к курсу БПЛА 1 происходит вне зависимости от абсолютных навигационных координат наземного материального объекта 2, а лишь для устранения отклонения границ поля зрения видеокамеры 11 от оптического маркера 21.
Наземный материальный объект 2 может двигаться по любой пересеченной местности, причем ограничением является только его проходимость. Возможность предлагаемого способа ограничиваются движением наземного материального объекта в тоннелях, но этот случай является достаточно редким.
При этом если наземный объект производит остановку, БПЛА «зависает» над ним в определенной точке пространства.
Техническим результатом предлагаемого изобретения является повышения надежности управления за счет независимости от качества радиосигналов, транслируемых по любому радиоканалу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления беспилотным летательным аппаратом | 2020 |
|
RU2749538C1 |
| Способ блокирования связи в непосредственной близости от движущегося материального объекта | 2021 |
|
RU2766443C1 |
| СПОСОБ БЛОКИРОВАНИЯ СИГНАЛА В ЛОКАЛЬНОМ РАЙОНЕ НАХОДЖЕНИЯ МАТЕРИАЛЬНОГО ОБЪЕКТА | 2021 |
|
RU2773056C1 |
| Способ обнаружения и идентификации транспортных средств | 2020 |
|
RU2745164C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| Воздухоплавательный аппарат | 2017 |
|
RU2652322C1 |
| ВОЗДУШНОЕ ТАКСИ | 2015 |
|
RU2609660C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2581971C1 |
Изобретение относится к способу сопровождения беспилотным летательным аппаратом (БПЛА) наземного объекта, перемещающемуся по некоторому маршруту. Для сопровождения наземного объекта на нем размещают оптический маркер, а на борту БПЛА устанавливают видеокамеру. Для управления полетом БПЛА создают управляющие воздействия для отслеживания оптического маркера с помощью анализа видеопотока видеокамеры, направленной на оптический маркер. 2 з.п. ф-лы, 1 ил.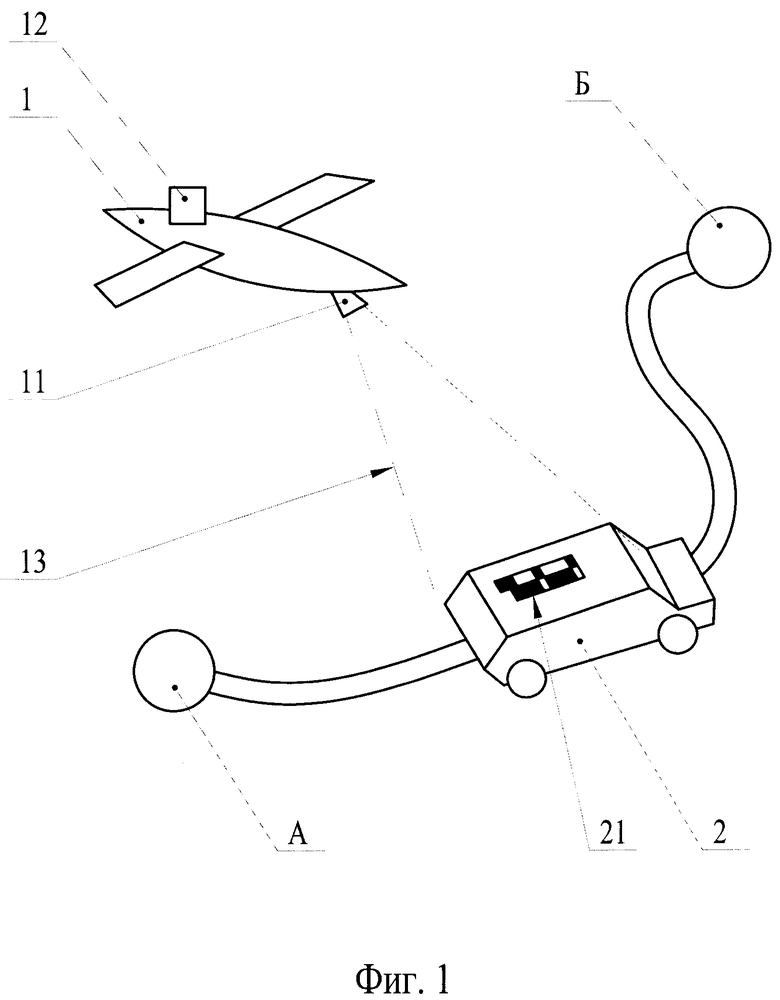
1. Способ сопровождения беспилотным летательным аппаратом наземного объекта, основанный на анализе видеопотока с установленной на борту видеокамерой, отличающийся тем, что управление маршрутом полета выполняют с использованием оптического маркера, размещенного на наземном материальном объекте, перемещающемся по некоторому маршруту.
2. Способ по п. 1, отличающийся тем, что оптический маркер нанесен на крыше наземного материального объекта.
3. Способ по п. 1, отличающийся тем, что оптический маркер выполнен с помощью люминесцентной краски.
| СПОСОБ НАБЛЮДЕНИЯ ОБЪЕКТОВ С ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА, ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ОБЗОРНАЯ КАДРОВАЯ СИСТЕМА ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2279999C2 |
| RU 198460 U1, 10.07.2020 | |||
| US 9587948 B2, 07.03.2017 | |||
| US 9518829 B2, 13.12.2016 | |||
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| УСТРОЙСТВО для снятия изоляциис концов | 0 |
|
SU200639A1 |

