Изобретение относится к обеспечению безопасности информационной безопасности и может быть использовано, в частности, для борьбы с терроризмом техническими средствами.
Зачастую в непосредственной близости от движущегося материального объекта (например, автомобиля) производят блокирование радиосвязи. Это необходимо, в частности, для информационной безопасности (известно, что иногда злоумышленники устанавливают в транспортные средства, так называемые, трекеры, всевозможные «жучки» и т.д. - управление и передача информации в котором обеспечивается с помощью радиоканала - https://www.gdemoi.ru/res/gps-treker-s-magnitom/), а также для борьбы с терроризмом (например, многие ВУ управляются по радиоканалу).
Для блокирования связи на материальный объект размещают блокираторы РВУ большой мощности (например, типа «Грифон 10 Т», https://detsys.ru/catalog/antiterroristicheskoe-oborudovanie/blokatory-radiovzryvatelej/grifon_10t/, размещенного на автомобиле). Но способ блокирования связи в непосредственной близости от движущегося объекта с помощью размещения внутри материальных объектов таких блокираторов РВУ имеет ряд недостатков.
Так, например, из-за небольшой высоты подъема излучающей антенны (обычно излучающая антенна размещается на крыше движущегося объекта) «пятно блокирования» будет сравнительно небольшим (термином «пятно» далее обозначается удаленная область, в которой приемопередатчик антенны обеспечивает покрытие целевой зоны (на прием или на передачу), причем интенсивность сигнала, принимаемого в указанной целевой зоне или передаваемого из указанной целевой зоны, соответственно, является достаточной).
Могут быть задачи по увеличению «пятна блокирования», например, в случаях если существует вероятность нападения на движущийся объект (чтобы лишить возможных нападающих радиосвязи на определенной площади).
Известно, что на дальность связи и действия излучения, очень сильно влияет высота подъема излучающей антенны (https://allcalc.ru/node/336). Так, например, увеличение высоты подъема в 10 раз увеличивает дальность действия излучения почти в 4 раза! При этом высоту подъема антенны менять невозможно и, следовательно, нельзя менять радиус и интенсивность излучающего сигнала внутри «пятна».
Для нивелирования таких недостатков предлагается способ, по которому блокирование в непосредственной близости от движущегося объекта обеспечивается при помощи беспилотного летательного аппарата с установленной на нем специальной установкой, отличающийся тем, что специальная установка представляет собой блокиратор РВУ, включающий антенну, направленную вниз, при этом сопровождение беспилотным летательным аппаратом движущегося объекта основывается на анализе видеопотока с установленной на борту видеокамеры, причем управление маршрутом полета выполняют с использованием оптического маркера, размещенного на движущемся объекте.
При использовании предложенного способа мощность блокиратора, размещенного на БПЛА, будет также использоваться более эффективно, чем при использовании блокиратора РВУ на движущемся объекте (в БПЛА будут использованы направленные антенны, направленные непосредственно на движущийся объект). Кроме того, возможно использование нескольких БПЛА.
Технической задачей предлагаемого изобретения является разработка способа обеспечивающего эффективное блокирование радиосвязи в непосредственной близости от движущегося объекта.
Решение поставленной технической задачи достигается за счет совокупного применения следующих технических решений:
- использования беспилотного летательного аппарата для размещения установки - блокиратора РВУ,
- способа сопровождения БПЛА движущегося объекта.
Предлагаемый способ поясняется двумя чертежами - фиг. 1 и фиг. 2
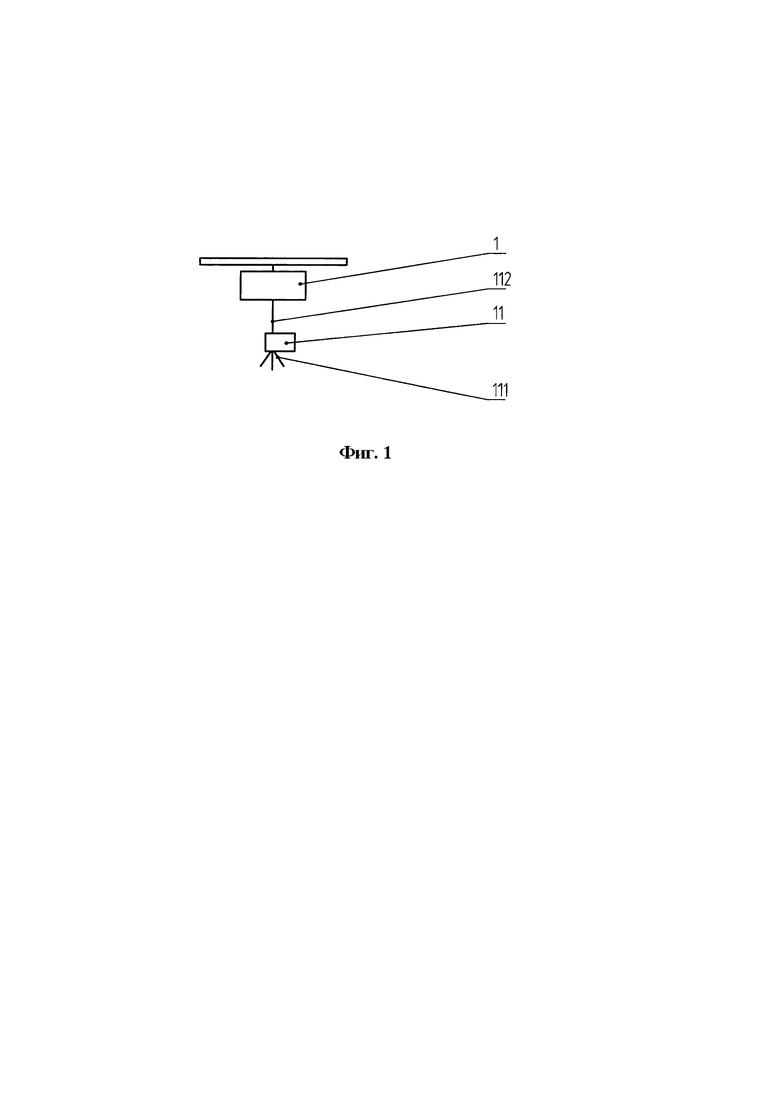
На фиг. 1 (поясняется решение использования беспилотного летательного аппарата для размещения установки - блокиратора РВУ) позициями обозначены: беспилотный летательный аппарат 1, блокиратор РВУ 11 с излучающей, направленной вниз антенной 111.
Для повышения эффективности излучающая антенна 111 может быть приближена или отдалена. Это может быть осуществлено за счет снижения беспилотного летательного аппарата 1 над объектом 3 или за счет удаления излучающей антенны 111 вместе с блокиратором РВУ 11 от корпуса беспилотного летательного аппарата 2 на специальном кабеле 112 (либо может быть удалена от корпуса только антенна). При этом излучающая антенна может быть приближена как отдельно, так и совместно с блокиратором РВУ (в зависимости от решаемых задач, при этом надо учитывать существенные потери при перемещении отдельно от блокиратора РВУ).
На фиг. 2 (поясняется решение способа сопровождения БПЛА движущегося объекта), позициями обозначено: БПЛА - 1 с видеокамерой 11, движущийся материальный объект 2, оптический маркер 21.
Конструкция объекта 2 не является предметом охраны по настоящей заявке. При сопровождении БПЛА человека, маркер может наноситься, например, на его шлем. При сопровождении автомобиля маркер может наноситься на крышу.
Для маркировки допускается использование штрих-кода (qr-кода). Дело в том, что многие современные камеры способны идентифицировать объекты, оснащенные штрих-кодами, в автоматическом режиме.
Для увеличения дистанции контроля БПЛА перемещающегося материального объекта в плохо освещенной местности и/или в ночное время рекомендуется оптический маркер изготавливать с помощью люминесцентной краски.
При этом может задаваться за ранее высота БПЛА при сопровождении объекта, также высота может меняться по определенному заданному алгоритму (например, вследствие ухудшения видимости), либо сам оператор может менять высоту любым возможным способом (в том числе и по радиоканалу).
Предлагаемый способ осуществляется следующим образом.
Пусть БПЛА сопровождает материальный объект. На наземном движущемся материальном объекте любым известным способом наносят идентифицирующую маркировку, которая будет являться оптическим маркером для БПЛА.
Предпочтительным является нанесение оптического маркера на крышу материального объекта. Этот вариант показан на фиг. 2.
БПЛА взлетает в пункте «01» и набирает высоту, заданную изначально в устройство, являющееся частью конструкции БПЛА, или передаваемое на это устройство любым известным способом.
Наземный материальный объект начинает движение. Видеокамера, расположенная на БПЛА, ведет постоянное отслеживание оптического маркера. На фиг. 2 конус 13 символизирует поле зрения видеокамеры. Вычисление необходимых поправок к курсу БПЛА происходит вне зависимости от абсолютных навигационных координат наземного материального объекта, а лишь для устранения отклонения границ поля зрения видеокамеры от оптического маркера.
Наземный материальный объект может двигаться по любой пересеченной местности, причем ограничением является только его проходимость. Возможность предлагаемого способа ограничиваются движением наземного материального объекта в тоннелях, но этот случай является достаточно редким.
При этом, если наземный объект производит остановку, БПЛА «зависает» над ним в определенной точке пространства.
При этом беспилотный летательный аппарат во время сопровождения движущегося материального объекта для блокирования связи в непосредственной близости от движущегося материального объекта использует блокиратор РВУ.
На фиг. 2 показан пример работы предлагаемого устройства, в котором антенну 111 опускают на специальном кабеле 112 (может быть как вместе с блокиратором РВУ или отдельно).
С помощью направленной вниз излучающей антенной 111 блокиратора РВУ создают помехи в диапазоне (предпочтительнее использовать как можно больший диапазон блокирования, например, от 30 МГц до 6000 МГц). При этом при необходимости, можно использовать не одну, а несколько излучающих антенн (чем более широкий диапазон блокирования, тем большее количество излучающих антенн будет задействовано).
Для блокирования связи можно использовать всевозможные блокираторы радиосвязи, которых в данное время российской и зарубежной промышленностью выпускается достаточно большое количество. Например, «Пелена-8У» (http://kobra.su/catalog/nosimyj/item/174-pelena-8u/).
В случае изменения какого-то параметра, например высоты или скорости БПЛА (возврат на заданные точки, закончить сопровождение и т.д.), оператор может подать соответствующую команду (находясь на Земле) за счет устройства синхронизации, соединенного с оптическим маркером (по проводной или беспроводной связи), которое заданную команду переводит в графический символ, понятную для системы управления БПЛА.
Для изменения оптического маркера можно использовать различные графические системы, например LCD-экран. Для устройства синхронизации команд оператора и изменения оптического маркера можно использовать любое ПЭВМ, смартфон или подобное устройство.
Техническим результатом применения предлагаемого способа является эффективное блокирование радиосвязи в непосредственной близости от движущегося объекта.

Изобретение относится к обеспечению безопасности информационной безопасности и может быть использовано, в частности, для борьбы с терроризмом техническими средствами. Технический результат заключается в обеспечении эффективного блокирования радиосвязи в непосредственной близости от движущегося объекта. Предложенный способ блокирования связи в непосредственной близости от движущегося материального объекта обеспечивается при помощи беспилотного летательного аппарата с установленной на нем специальной установкой, отличающийся тем, что специальная установка представляет собой блокиратор радиоуправляемых взрывных устройств (РВУ), включающий антенну, направленную вниз, при этом сопровождение беспилотным летательным аппаратом движущегося объекта основывается на анализе видеопотока с установленной на борту видеокамеры, причем управление маршрутом полета выполняют с использованием оптического маркера, размещенного на движущемся объекте. 2 ил.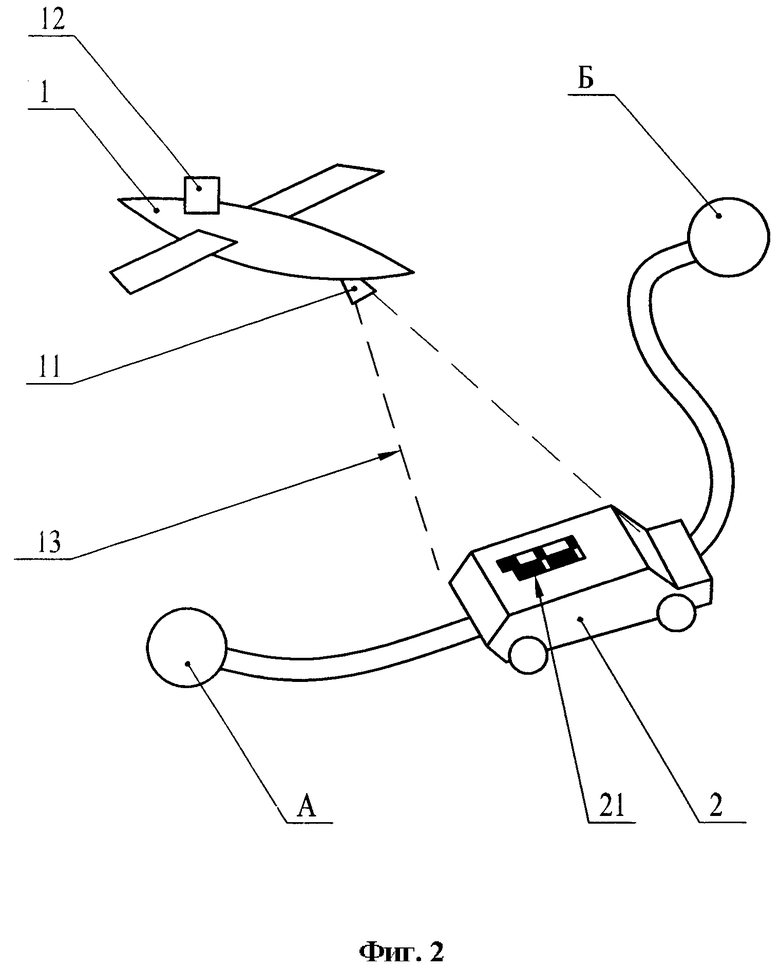
Способ блокирования связи в непосредственной близости от движущегося материального объекта при помощи беспилотного летательного аппарата с установленным на нем устройством – блокиратором РВУ, включающим антенну, направленную вниз, при этом сопровождение беспилотным летательным аппаратом движущегося объекта основывается на анализе видеопотока с установленной на борту видеокамеры, причем управление маршрутом полета выполняют с использованием оптического маркера, размещенного на движущемся объекте, при этом команды управления наземным оператором подаются на беспилотный летательный аппарат для изменения оптического маркера за счет устройства синхронизации, соединенного с оптическим маркером по проводной или беспроводной связи, которое переводит заданную команду в графический символ, понятный для системы управления беспилотным летательным аппаратом.
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| DAVIDE FALANGA et al., Vision-based Autonomous Quadrotor Landing on a Moving Platform, 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Date of Conference: 11-13 Oct | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| US 2014062754, 2014.03.06 | |||
| WO 2018010756, 2018.01.18 | |||
| US 2020302638 A1, 2020.09.24 | |||
| US 2018150970 A1, 2018.05.31 | |||

