Изобретение относится к машиностроению и может быть использовано в технологических машинах-автоматах многих отраслей промышленности, а также в приборостроении.
Известен шарнйрно-рычажный .еханизм, содержащий стойку с направляющей, ползун, вз ьимодействующий с направляющей стойки, кривсй1ип, шарнирно связанный со стойкой и шатуном, рычаг, шарнирно связанный с-ползуном и шатуном 1.
Недостатком данного механизма яв.ляется его неточность, которая объясняется тем, что приложенные к ползуну статические силы в процессе работы изменяют свою величину и поэтому остановки получаются не стабиль-
НЫМИ. . .
Целью изобретения является повышение точности механизма.
Указанная цель достигается тем,, что механизм, содержащий стойку с направляющей, ползун, взанмодействую ций. с направляющей стойки, кривошип, шарнирно связанный со стойкой и шатуном, рычаг, шарнирно связанный с ползуном и шатуном, последний снабжен пружиной, закрепленной на стойке и к полйуну.
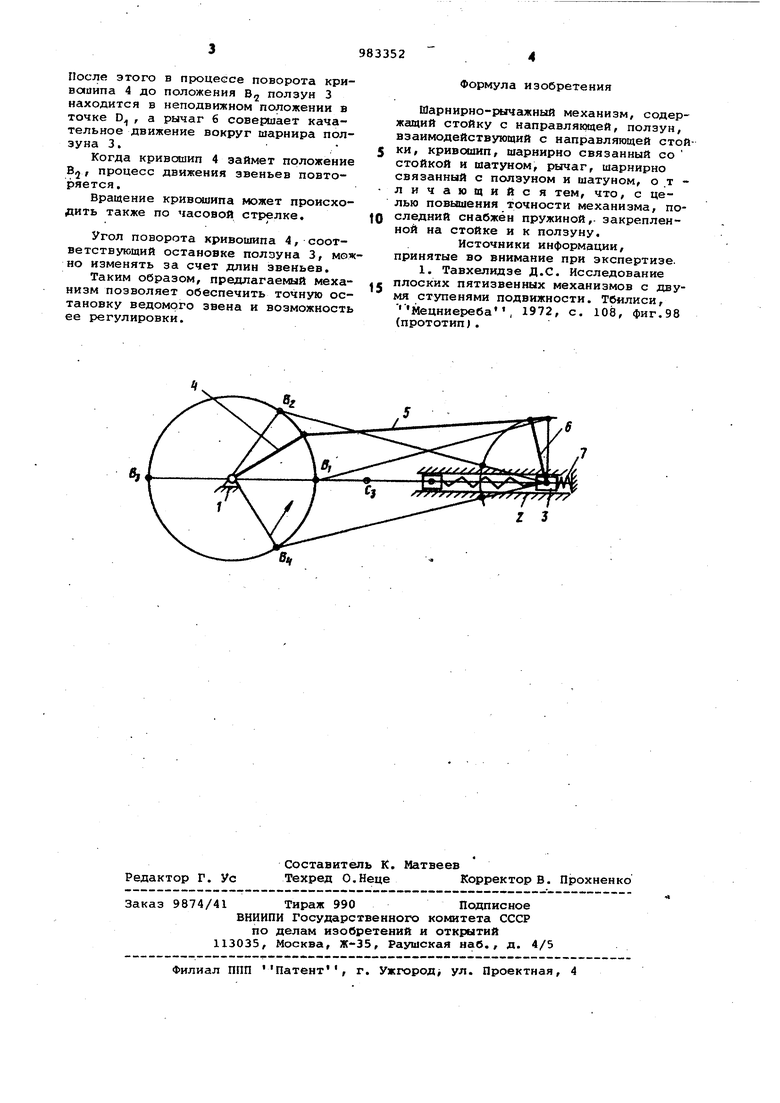
На чертеже представлена кинематическая схема шарнирно-рычажного механизма. ,
Шарнйрно-рычажный механизм содержит стойку 1 с направляющей 2, ползун 3, взаимодействующий с направляющей 2 стойки 1, кривсниип 4, шарнирно связанный со стойкой, и шатуном 5, рычаг 6, шарнирно связанный с пол10зунрм 3 и шатуном 5, пружину 7, закрепленную на стойке 1 и к ползуну 3.
Механизм работает следующим образом.
При вращении кривошипа 4, например,
15 против часовой стрелки из положения В„, когда шатун 5 и рычаг 6 распрлоjjjf когда шатун 5 и рычаг жены на. одной прямой, ползун 3
из
iправого положения D, перемещается в крайнее Левое положение Dj, соответ20 ствукидее положению кривошипа 4 Bj. При повороте кривошипа 4 из положения БЗ до положения В4 ползун 3 занимает . опять положение О-), а шатун 5 и рычаг 6 располагаются на однойпрямой.
25 Дальнейший поворот кривошипа 4 до
поло} ения В сопровоид1ается смещением ползуна 3 из положения D в крайнее правое положение, после чего шатун 5 располагается под углом к рычагу 6,
30 а ползун 3 занимает положение D.
После этого в процессе поворота криваиипа 4 до положения В ползун 3 находится в неподвижном положении в точке D, а рычаг 6 совершает качательное движение вокруг шарнира ползуна 3.
Когда кривошип 4 займет положение БЗ, процесс движения звеньев повторяется.
Вращение кривошипа может происходить также по часовой стрелке.
Угол поворота кривошипа 4, соответствующий остановке ползуна 3, можно изменять за счет длин звеньев.
Таким образом, предлагаемый механизм позволяет обеспечить точную остановку ведомого звена и возможность ее регулировки.
Формула изобретения
Шарнирно-рычажный механизм, содержащий стойку с направляющей, ползун, взаимодействующий с направляющей стойки, кривошип, шарнирно связанный со стойкой и шатуном, рычаг, шарнирно связанный с ползуном и шатуном, о .т личающийся тем, что, с целью повышения точности механизма, последний снабжён пружиной,, закрепленной на стойке и к ползуну.
Источники информации, принятые во внимание при экспертизе.
1. Тавхелидзе Д.С. Исследование плоских пятизвенных механизмов с двумя ступенями подвижности. Тбилиси, Мецниереба, 1972, с. 108, фиг.98 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм | 1980 |
|
SU1004697A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Горизонтально-ковочная машина | 1985 |
|
SU1291268A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ С ВЫСТОЯМИ | 1991 |
|
RU2019767C1 |
| Безмуфтовый механический пресс | 2020 |
|
RU2752399C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Привод нижней плиты печатно-позолотного пресса | 1986 |
|
SU1391956A1 |
