Изобретение относится к железнодорожному транспорту и может быть использовано для автоматического закрепления подвижного состава при закреплении механизированными устройствами преимущественно в станционных парках.
Известна автоматизированная система закрепления железнодорожного подвижного состава, содержащая устройства закрепления подвижного состава, подсистему управления устройствами закрепления, связанную с маневровой колонкой, с устройствами закрепления и, по меньшей мере, одним контроллером, который связан, кроме этого, с пультом управления, расположенным у дежурного по станции, а также соответствующими цепями увязки с устройствами электрической централизации, устройствами отображения диагностической информации и подсистемой прицельной остановки поезда, снабженной пунктами счета осей и устройствами передачи данных на локомотив, в подсистему прицельной остановки поезда дополнительно включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и средства дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления, при этом в память контроллера внесена база данных подвижных железнодорожных единиц с указанием для каждой подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар подвижной единицы и ее межосевых расстояний (RU 2598919, B61L 7/00, 10.10.2016).
Недостатками известного технического решения являются недостаточная надежность работы, значительное количество оборудования и большие временные затраты для остановки и последующего закрепления поезда.
В качестве прототипа выбрана автоматизированная система закрепления подвижного состава, содержащая механизированные устройства закрепления подвижного состава, подсистему управления устройствами закрепления, связанную с маневровой колонкой, с устройствами закрепления и, по меньшей мере, одним контроллером, который связан, кроме этого, с пультом управления, расположенным у дежурного по станции, маневровой колонкой, а также соответствующими цепями увязки с устройствами электрической централизации, устройствами отображения диагностической информации и подсистемой прицельной остановки поезда, снабженной пунктами счета осей и устройствами передачи данных на локомотив, в подсистему прицельной остановки поезда дополнительно включены подключенные к соответствующим входам контроллера средства для идентификации типов подвижных единиц, пункт фиксации момента входа поезда в зону прицельной остановки, пункт регистрации колеса в зоне закрепления и средства дистанционного контроля положения закрепляемой колёсной пары в зоне устройств закрепления, при этом в память контроллера внесена база данных железнодорожных подвижных единиц с указанием для каждой подвижной единицы, по меньшей мере, принадлежности к вагону или локомотиву, количества колесных пар подвижной единицы и ее межосевых расстояний, средства для идентификации типов подвижных единиц поезда включают рельсовую цепь наложения и, по меньшей мере, два датчика регистрации прохода колеса, расположенные друг от друга на расстоянии, меньшем минимально возможного расстояния между двумя колесными парами всех существующих подвижных железнодорожных единиц, пункт фиксации момента входа поезда в зону прицельной остановки включает, по меньшей мере, один датчик регистрации прохода колеса, либо изолирующий стык рельсовой цепи, ограничивающие, соответственно, границу станционного пути, на который принимается закрепляемый подвижной состав, пункт регистрации колеса в зоне закрепления включает, по меньшей мере, два датчика регистрации прохода колеса (RU 2706751, B61K 7/00, B61L 25/00, 20.11.2019).
Недостатками известного технического решения являются недостаточная надежность работы, значительное количество оборудования, невозможность полной автоматизации системы, невыполнение требований функциональной безопасности ГОСТ 33894-2016, значительная погрешность работы системы при неравномерном движении подвижных единиц. С учетом требований ГОСТ 33894-2016 в рассматриваемой системе снижена надежность и безопасность системы.
Технический результат изобретения заключается в упрощении процесса автоматического закрепления подвижного состава и повышении функциональной безопасности системы закрепления подвижного состава.
Технический результат достигается тем, что система автоматического закрепления подвижного состава содержит установленные на участке пути устройства закрепления, между которыми размещены устройства фиксации прохождения осей колесных пар подвижного состава, а перед первым устройством закрепления и после последнего устройства закрепления по ходу движения подвижного состава дополнительно установлены на расстоянии друг от друга по два устройства фиксации прохождения осей колесных пар, выходы устройств фиксации прохождения осей колесных пар подвижного состава через преобразователь аналогового сигнала подключены к вычислительному устройству обработки данных позиционирования подвижного состава с подключенным к нему модулем памяти, в котором записана карта участка пути с указанными на ней местами размещения устройств закрепления, первый выход вычислительного устройства обработки данных позиционирования подвижного состава соединен со средством передачи информации машинисту и на устройства отображения информации, установленные вдоль пути в зоне видимости машиниста локомотива, ко второму выходу вычислительного устройства обработки данных позиционирования подвижного состава подключен преобразователь цифрового сигнала, который через первый релейный интерфейс соединен с информационным входом устройства электрической централизации, входы/выходы которого соединены с выходами/входами соответствующих устройств закрепления, третий выход вычислительного устройства обработки данных позиционирования подвижного состава подключен ко входу формирователя команд управления устройствами закрепления, выход которого через последовательно включенные второй преобразователь цифрового сигнала и второй релейный интерфейс соединен со входом управления закреплением устройства электрической централизации.
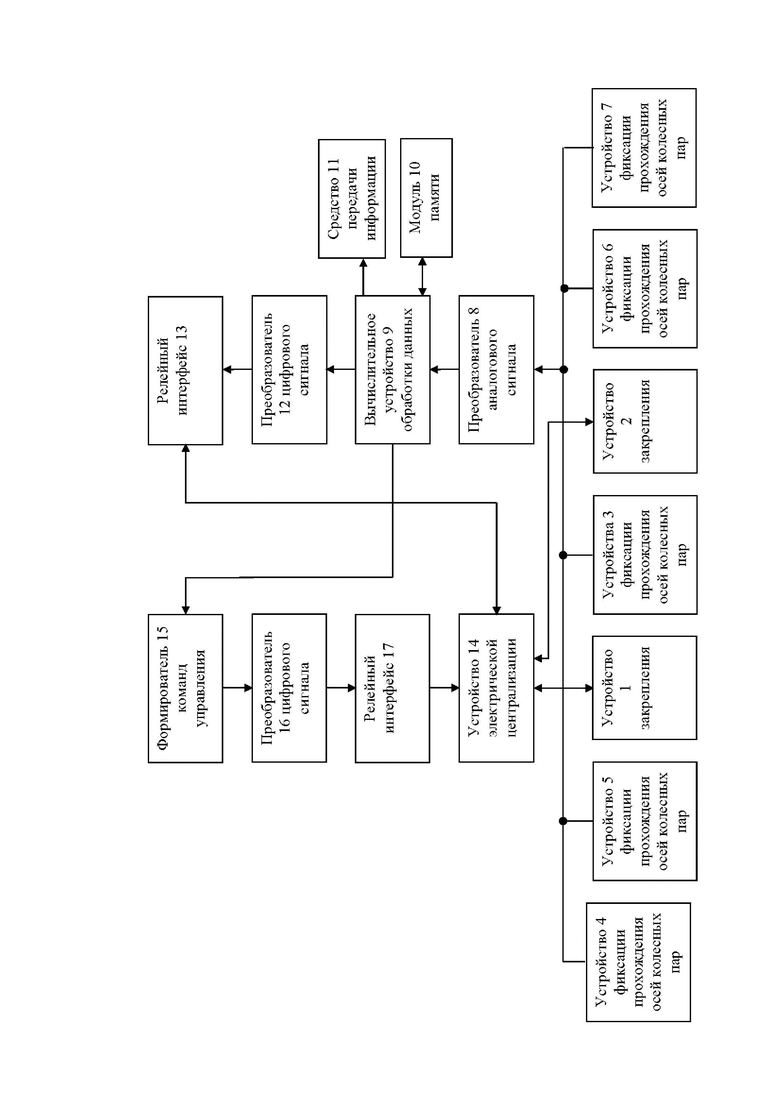
На чертеже представлена схема системы автоматического закрепления подвижного состава.
Система автоматического закрепления подвижного состава содержит установленные на участке пути устройства 1, 2 закрепления, между которыми размещены устройства 3 фиксации прохождения осей колесных пар подвижного состава, а перед первым устройством 1 закрепления и после последнего устройства 2 закрепления по ходу движения подвижного состава дополнительно установлены на расстоянии друг от друга по два устройства 4,5 и 6,7 фиксации прохождения осей колесных пар, выходы устройств ( 3- 7) фиксации прохождения осей колесных пар подвижного состава через преобразователь 8 аналогового сигнала подключены к вычислительному устройству 9 обработки данных позиционирования подвижного состава с подключенным к нему модулем 10 памяти, в котором записана карта участка пути с указанными на ней местами размещения устройств закрепления, первый выход вычислительного устройства обработки данных позиционирования подвижного состава соединен со средством 11 передачи информации машинисту и на устройства отображения информации, установленные вдоль пути в зоне видимости машиниста локомотива, ко второму выходу вычислительного устройства 9 обработки данных позиционирования подвижного состава подключен преобразователь 12 цифрового сигнала, который через первый релейный интерфейс 13 соединен с информационным входом устройства 14 электрической централизации, входы/выходы которого соединены с выходами/входами соответствующих устройств 1 и 2 закрепления, третий выход вычислительного устройства 9 обработки данных позиционирования подвижного состава подключен ко входу формирователя 15 команд управления устройствами закрепления, выход которого через последовательно включенные второй преобразователь 16 цифрового сигнала и второй релейный интерфейс 17 соединен со входом управления закреплением устройства 14 электрической централизации.
Система автоматического закрепления подвижного состава функционирует следующим образом.
Процесс закрепления состава при закреплении с головы поезда описан ниже.
При въезде состава на участок закрепления первая колесная пара проезжает через устройство 7 фиксации прохождения осей колесных пар, информация от которого поступает в преобразователь 8 аналогового сигнала, который преобразует аналоговый сигнал в цифровой и этот цифровой сигнал поступает в вычислительное устройство 9 обработки данных. Устройства 4 и 7 фиксации прохождения осей предназначены для контроля въезда подвижного состава в зону закрепления и для формирования вагонной модели подвижной единицы. Устройства (4 и 5) и (6 и 7) фиксации прохождения осей колесных пар подвижного состава расположены на расстоянии большем, чем максимальное расстояние между двумя колесами разных вагонных тележек.
Устройство 5 и 3 фиксации прохождения осей предназначены для контроля количества колесных пар, проехавших через устройство 1 закрепления. Устройство 3 и 6 фиксации прохождения осей предназначены для контроля количества колесных пар, въехавших в устройство 2 закрепления. В качестве устройств фиксации прохождения осей колесных пар могут применяться известные устройства, например, УФПО-21 (ГКЦЛ.402253.003 ТУ). Устройства фиксации прохождения осей могут применяться как одиночными, так и с дублированием для обеспечения функциональной безопасности и надежности системы.
Вычислительное устройство 9 обработки данных по времени прохода колесной пары производит расчет количества колесных пар в вагонной тележке, длины базы вагона, расстояние между колесными парами. Полученные данные в вычислительном устройстве 9 обработки данных сравниваются со сформированной базой подвижного состава. На основе сравнения производится построение вагонной модели. В вагонной модели просчитываются расстояния между колесными парами, типы подвижных единиц (тип вагонов и локомотивов), определяется положение локомотива относительно направления движения. Например, если состав движется в четном направлении и первая подвижная единица определена как локомотив, то можно сделать вывод, что закрепление будет происходить по первому вагону, если в нечетном направлении, то закрепление будет производиться по последнему вагону.
На основании модели определяется закрепляемая часть: голова или хвост. После чего производится определение необходимой точки остановки. Вычислительное устройство 9 обработки данных по данным от устройств (4, 5, 3, 6, 7) фиксации прохождения осей колесных пар и информации из модуля 10 памяти об участке пути с местами размещения на нем устройств закрепления непрерывно рассчитывает оставшееся расстояние до точки остановки. В процессе движения железнодорожного подвижного состава информация о расстоянии до необходимой точки остановки поступает в средство 11 передачи информации, которое передает эту информацию по радиоканалу в приемопередатчик машиниста, а также по кабельной сети в устройства отображения информации, установленные вдоль пути в зоне видимости машиниста локомотива (на чертеже не показано). Получая информацию от средства 11 передачи информации, машинист корректирует скорость движения локомотива для достижения точки прицельной остановки.
Состав считается правильно позиционированным, если ось первой колесной пары вагона при закреплении с головы или ось последней колесной пары при закреплении с хвоста находится на расстоянии не более допустимого от устройства 1 закрепления. Допустимое расстояние определяется на основании применяемого технического средства.
Вычислительное устройство 9 обработки данных фиксирует факт остановки и, после определенной выдержки времени, передает цифровой сигнал по сети Ethernet в преобразователь 12 цифрового сигнала и на вход формирователя 15 команд управления устройствами закрепления. С выхода преобразователя 12 цифрового сигнала преобразованный сигнал поступает на релейный интерфейс 13, который может представлять собой электромагнитные реле. В этом случае при поступлении питания на обмотки реле, происходит замыкание общих и нормально разомкнутых (фронтовых) контактов и информация о правильности позиционирования передается на информационный вход устройства 14 электрической централизации.
При поступлении по каналу Ethernet на вход формирователя 15 команд управления информации от вычислительного устройства 9 обработки данных о правильности позиционирования состава, формирователь 15 вырабатывает команду на закрепление. С его выхода цифровой сигнал по сети Ethernet поступает в преобразователь 16 цифрового сигнала, осуществляющий преобразование цифрового сигнала для его подачи на релейный интерфейс 17. Например, на обмотку реле, в результате чего происходит замыкание общих и нормально разомкнутых (фронтовых) контактов, включенных в цепи управления устройства 14 электрической централизации. Замкнутое состояние контактов является командой перевода устройств закрепления из одного состояния в другое. Разомкнутое состояние свидетельствует, что команда не подавалась. Устройство 14 электрической централизации управляет устройствами закрепления с учетом требований «ГОСТ 33894-2016. Межгосударственный стандарт. Системы железнодорожной автоматики и телемеханики на железнодорожных станциях. Требования безопасности и методы контроля». Устройство 14 электрической централизации переводит устройства закрепления в одно из положений: рабочее (закрепление установлено) или нерабочее (закрепление снято). После чего устройство 14 электрической централизации получает от устройств 1, 2 закрепления информацию об их положении. После получения информации о контроле положения устройств закрепления состав считается закрепленным.
Таким образом, предлагаемое изобретение обеспечивает простоту процесса автоматического закрепления подвижного состава и повышение функциональной безопасности системы закрепления подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| Способ работы устройства контроля схода подвижного состава | 2023 |
|
RU2801837C1 |
| Система контроля и управления заграждающими устройствами | 2024 |
|
RU2830327C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2519323C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Система автоматического закрепления подвижного состава содержит установленные на участке пути устройства закрепления, между которыми размещены устройства фиксации прохождения осей колесных пар подвижного состава и установленные перед первым устройством закрепления и после последнего устройства закрепления по ходу движения подвижного состава по два устройства фиксации прохождения осей колесных пар, преобразователь аналогового сигнала, вычислительное устройство обработки данных с подключенным к нему модулем памяти, средство передачи информации, преобразователь цифрового сигнала, первый релейный интерфейс, формирователь команд управления, второй преобразователь цифрового сигнала, второй релейный интерфейс и устройство электрической централизации. Выходы устройств фиксации прохождения осей колесных пар подвижного состава через преобразователь аналогового сигнала подключены к вычислительному устройству обработки данных. Входы/выходы устройства электрической централизации соединены с выходами/входами соответствующих устройств закрепления. Технический результат заключается в упрощении процесса автоматического закрепления подвижного состава и повышении функциональной безопасности. 1 ил.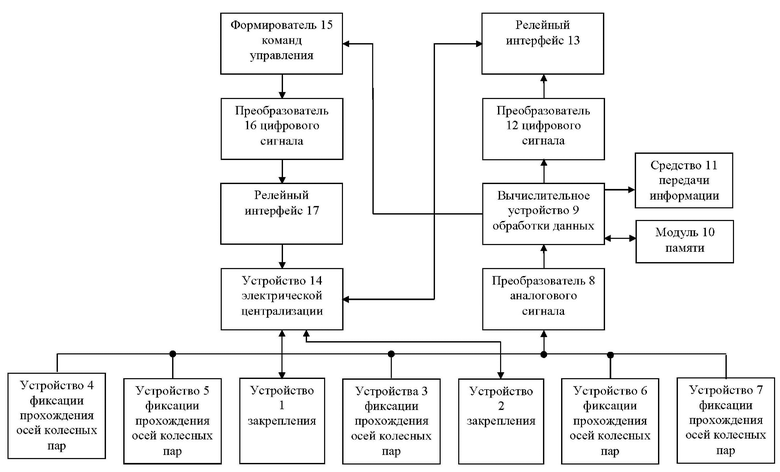
Система автоматического закрепления подвижного состава, содержащая установленные на участке пути устройства закрепления, между которыми размещены устройства фиксации прохождения осей колесных пар подвижного состава, а перед первым устройством закрепления и после последнего устройства закрепления по ходу движения подвижного состава дополнительно установлены на расстоянии друг от друга по два устройства фиксации прохождения осей колесных пар, выходы устройств фиксации прохождения осей колесных пар подвижного состава через преобразователь аналогового сигнала подключены к вычислительному устройству обработки данных позиционирования подвижного состава с подключенным к нему модулем памяти, в котором записана карта участка пути с указанными на ней местами размещения устройств закрепления, первый выход вычислительного устройства обработки данных позиционирования подвижного состава соединен со средством передачи информации машинисту и на устройства отображения информации, установленные вдоль пути в зоне видимости машиниста локомотива, ко второму выходу вычислительного устройства обработки данных позиционирования подвижного состава подключен преобразователь цифрового сигнала, который через первый релейный интерфейс соединен с информационным входом устройства электрической централизации, входы/выходы которого соединены с выходами/входами соответствующих устройств закрепления, третий выход вычислительного устройства обработки данных позиционирования подвижного состава подключен ко входу формирователя команд управления устройствами закрепления, выход которого через последовательно включенные второй преобразователь цифрового сигнала и второй релейный интерфейс соединен со входом управления закреплением устройства электрической централизации.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВАМИ ЗАКРЕПЛЕНИЯ ПОЕЗДА | 2015 |
|
RU2598919C1 |
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| Автоматизированная система закрепления железнодорожного подвижного состава | 2019 |
|
RU2706751C1 |
| CN 117341762 A, 05.01.2024. | |||

