Изобретение относится к области судостроения, а именно к способам и методам испытаний безэкипажных, автономных надводных судов или роботизированных объектов. Способ предназначен для независимого определения тактико-технических характеристик испытуемых судов при их движении и выполнении заданных маневров.
В настоящее время в Российской Федерации для испытаний надводных судов используются методы, описанные в Руководстве по определению маневренных характеристик судов, НД №2-030101-007 - Российский морской регистр судоходства. - 2005 г., на международном уровне испытания регламентируются Резолюцией Комитета по безопасности на море Международной морской организации MSC. 137(76) «Стандарты маневренных качеств судов». Испытания судов проводятся силами экипажа и выполняются путем подачи команд капитаном или другим лицом, проводящим испытания. При этом суть всех команд сводится к управлению главными двигателями, движителями и рулем (подруливающими устройствами).
Для безэкипажных или автономных судов управление движением судна производится с использованием аппаратно-программных технических средств, алгоритмы работы которых являются весьма сложными и могут включать различные методы адаптивной оптимизации, дифференциального регулирования или нейросетевые технологии управления. Таким образом, управление движением безэкипажных или автономных судов существенно отличается от традиционного управления судна экипажем, и для проведения ходовых и маневренных испытаний безэкипажных или автономных судов известные способы не приемлемы.
Известен способ контроля мореходности судна и устройство для его осуществления, описанный в патенте RU №2467914, опубл. 27.11.2012. Способ основан на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерении углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей, измерение истинных высоты волн и курсовых углов прихода волн относительно диаметральной плоскости судна и определении скорости и курсового угла течения и величины потери скорости судна от ветра и волнения. Дополнительно используются спутниковые системы высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности, атмосферных и астрономических явлений производится рендеринг окружающей обстановки, восстанавливается топология корпуса судна путем построения цифровой модели с учетом волнового и ветрового воздействий.
Недостатком известного аналога является сложность его реализации, связанная с большим количеством измерительных датчиков, которые необходимо устанавливать на судне, тарировать, настраивать и т.п. Кроме того для обработки поступающих данных необходимо использовать несколько разнородных по своему функционалу программных комплексов.
Среди известных аналогов наиболее близким по технической сущности и назначению является устройство, описанное в патенте RU №144079, опубл. 10.08.2014 («Измерительный комплекс определения траектории движения судна по заданному углу перекладки руля»). Натурные испытания судна, проводимые с использованием указанного комплекса, основаны на задании курса движения судна и сравнении его с реальной траекторией его движения по заданному углу перекладки руля. В состав оборудования, реализующего способ, включены интегрированная система ориентации и навигации судов, содержащая инерциальный измерительный модуль, мультиантенную приемную аппаратуру спутниковых навигационных систем, антенный модуль, управляющий компьютер и связанную с ними регистрирующую аппаратуру. При проведении испытаний антенный модуль принимает сигналы со спутников навигации, затем передает их на мультиантенную приемную аппаратуру спутниковых навигационных систем, где эти сигналы обрабатываются и преобразуются в данные (скорость судна, широта, долгота, а также координаты в декартовой системе, высота в географической системе координат, угол курса судна). Инерциальный измерительный модуль регистрирует значения угла крена и угла дифферента, затем дополняет ими данные, полученные с мультиантенной приемной аппаратуры спутниковых навигационных систем, и передает их на регистрирующую аппаратуру. На регистрирующей аппаратуре происходит запись полученных данных дополненных показаниями датчика угла перекладки руля. Измерения и запись данных проводится в режиме реального времени. Управление работой инерциального измерительного модуля производится при помощи управляющего компьютера.
Недостатком данного устройства является низкая точность определения местоположения судна и соответственно траектории его движения при проведении натурных испытаний, обеспечиваемая спутниковыми навигационными системами, точность которых для динамически движущегося объекта составляет более 1 метра. Это в свою очередь негативно сказывается на достоверности определения тактико-технических характеристик испытуемого объекта.
Техническим результатом от использования предлагаемого изобретения является повышение достоверности определения тактико-технических характеристик испытуемого объекта (безэкипажного или автономного надводного судна) за счет увеличения точности измерения его текущего местоположения и соответственно траектории движения при маневренных и ходовых испытаниях.
Для достижения указанного результата используется следующая совокупность существенных признаков: в способе проведения натурных испытаний, при котором задают курс движения судна и сравнивают его с реальной траекторией движения, определяемой по текущему местоположению объекта с помощью комплекса измерительной аппаратуры, в состав которого входит расположенный на берегу роботизированный тахеометр, работающий в паре с отражательной призмой, установленной на судне с возможностью ориентации в местной (относительной) системе координат по одному пункту государственной геодезической сети с известными географическими координатами и высотой, а также по заданному направлению (стороны света), последующей записи данных о текущем местоположении судна и их передачи на ЭВМ для визуализации, обработки и хранения.
Задача по автоматизированной ориентации роботизированного тахеометра в ортогональной системе координат (x,y,z) решается с привлечением оператора, который производит предварительную калибровку и установку прибора на берегу, в выбранной точке, после чего выполняет настройку координатных измерений, определяя их по пункту государственной геодезической сети или локальной геодезической сети и направления стороны света, а затем переводит тахеометр в режим слежения за отражательной призмой, установленной на вертикальной опоре судна на заданной высоте. Для слежения за призмой с помощью роботизированного тахеометра оператор включает функцию «Захват цели», позволяющую прибору выполнять автоматический поиск и захват призмы. Запись данных о положении корпуса судна и их передача на персональный компьютер для последующей обработки осуществляется тахеометром в течение всего периода захвата перемещения отражательной призмы.
Сущность предлагаемого способа заключается в более точном по сравнению с прототипом определении маневренных и ходовых характеристик безэкипажного судна путем определения реальной траектории движения судна в местной системе координат и сравнении ее с заданной. Поставленная задача решается за счет использования роботизированного тахеометра, находящегося на берегу и следящего за отражательной призмой, установленной на безэкипажном судне, совместная работа которых обеспечивает определение текущего местоположения судна. При этом обработку и хранение массива информации в автоматическом режиме осуществляет ЭВМ, формируя точную траекторию следования судна с дискретностью, предусмотренной техническими характеристиками роботизированного тахеометра. При этом данные могут быть пересчитаны ЭВМ из местной в географическую систему координат.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - более точное определение маневренных и ходовых характеристик безэкипажного или автономного надводного судна при проведении натурных испытаний путем повышения точности определения его текущего местоположения с помощью роботизированного тахеометра и соответственно траектории движения при маневренных и ходовых испытаниях решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
При этом проведенный информационный поиск в области судостроения выявил систему слежения за гидрографическим судном по патенту JP 2010030340 A, МПК Y02A90/32, опубл. 12.02.2010, содержащую следующие отличительные признаки заявляемого способа: способ осуществляется с помощью «отражательной призмы, установленной на судне, и тахеометра с автоматическим слежением за ней, установленного на берегу». Однако в отличие от заявленного изобретения устройство по японскому патенту дополнительно снабжено устройством позиционирования GPS с синхронизацией по времени. В аналоге плановое положение корпуса судна определяется из данных GPS-позиционирования, а высотное положение уточняется с использованием роботизированного тахеометра. Необходимость использования двух измерительных устройств для получения достаточной точности является главным отличием и одновременно недостатком известного технического устройства, кроме того в устройстве не обеспечивается независимость измерений из-за наличия GPS-приемника, установленного на судне. В предлагаемом способе точность достигается не с использованием GPS, а за счет установки тахеометра в точке с известными географическими координатами и возможностью ориентации в местной (относительной) системе координат по одному пункту государственной геодезической сети с известными географическими координатами и высотой, а также по заданному направлению (стороны света).
Изложенное позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
Сущность указанного способа поясняется графическими материалами, где:
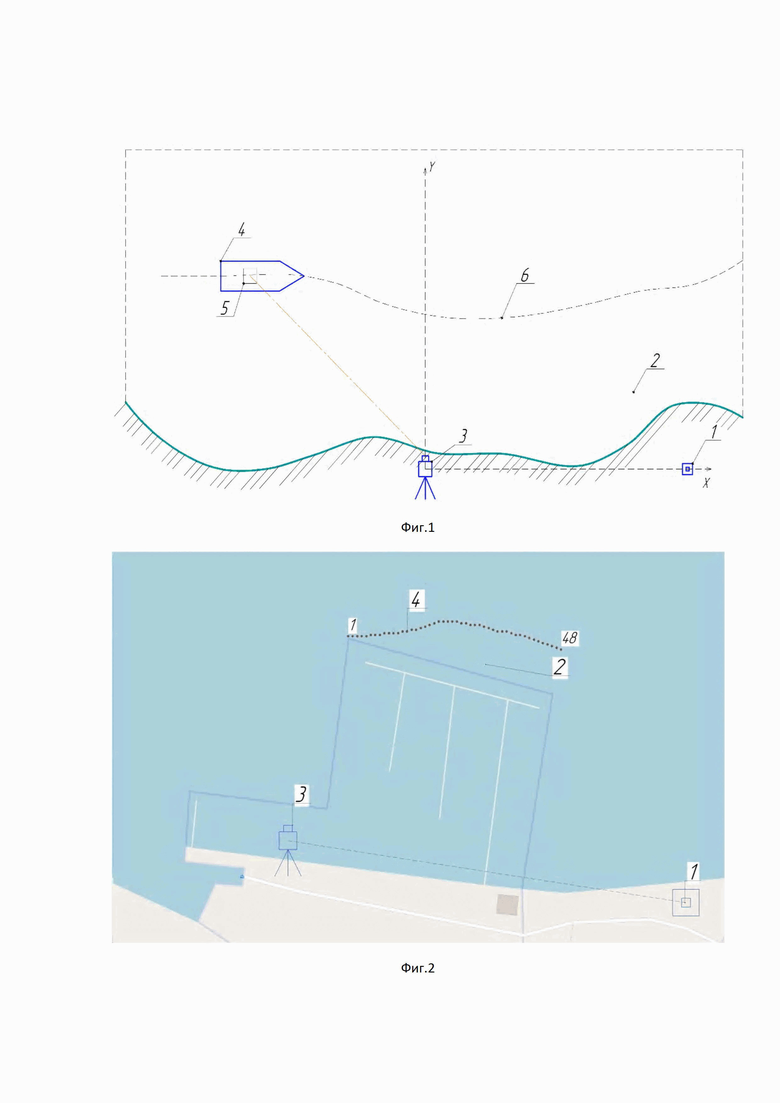
на фиг. 1 представлена схема определения местоположения безэкипажных и автономных судов при проведении натурных испытаний,
на фиг. 2 - траектория движения судна у пристани в акватории р. Невы г Санкт-Петербурга.
На схеме (фиг. 1) обозначены: пункт геодезической сети 1, акватория 2, роботизированный тахеометр 3, безэкипажное или автономное надводное судно 4, отражательная призма 5, траектория маршрута движения судна 6, XY - местная система координат (СК), автоматически созданная тахеометром по геодезическому пункту 2 и заданному направлению (стороны света).
На фиг 2 изображен: пункт геодезической сети 1, акватория 2, роботизированный тахеометр 3, траектория маршрута движения судна 4.
Предлагаемый способ включает следующую последовательность действий:
В заданной точке оператор устанавливает роботизированный тахеометр 3 и с учетом абсолютных географических координат пункта государственной геодезической сети 1 производит первичные настройки прибора 3, его проверку и координатные измерения. Отражательную призму 5 закрепляют на вертикальной опоре, установленной на палубе испытуемого судна 4, на заданной высоте относительно уровня воды, которая учитывается при настройке прибора 3. Для слежения за отражательной призмой 5 с помощью роботизированного тахеометра 3 оператор включает функцию «Захват цели», позволяющую выполнять автоматический поиск и захват призмы 5. В момент установки (захвата призмы) начинается запись данных о положении корпуса судна и их передача на ЭВМ для последующей обработки.
В предлагаемом способе роботизированный тахеометр передает данные о движении судна не чаще одного раза за 0,15 секунды в заданных единицах измерения и с необходимой точностью. Для определения курса судна используется следующая формула расчета:
где k - направление движения, i - порядковый номер измерения.

определение координат при движении цели

X, Y - координаты установки роботизированного тахеометра
х, у - координаты безэкипажного (автономного) судна.
Пример выполнения способа.
Безэкипажное или автономное судно 4 с установленной на вертикальной опоре отражательной призмой 5 выполняет маневр в непосредственной близости к причалу, на котором установлен роботизированный тахеометр 3 с подключенным к нему персональным компьютером (ЭВМ). Оператор производит первичные настройки тахеометра 3, поверку и координатные измерения, затем включает функцию «Захват цели», запускает запись и передачу данных о положении корпуса судна на персональный компьютер (ЭВМ) для последующей обработки. Результаты испытания изобретения у пристани в акватории р. Невы г Санкт-Петербурга представлены на фиг. 2 и в табл. 1. Измерения проводились с использованием Leica TS16 I R1000, заданной частотой 1 раз в секунду в системе картографических проекций UTM (по значениям X, Y), затем вычислялась разность между значениями переменных. Изменения положения корпуса судна по высоте (dZ) фиксировались с помощью роботизированного тахеометра и пересчитывалась в разность высот.
Таблица 1 - Пример данных, полученных от роботизированного тахеометра.
По сравнению с прототипом предлагаемый способ позволять более точно определять положение судна в заданный момент времени и таким образом получать более достоверные тактико-технические параметры испытуемого судна. Кроме того реализация способа не требует установки на безэкипажное или автономное судно какой-либо дополнительной измерительной аппаратуры. Кроме того, точность измерения координат при движении судна по внутренним водным путям составляет 1,0…2.5 м. (в соответствии с Радионавигационный план Российской Федерации, утв. приказом Минпромторга России от 28 июля 2015 г. N 2123.), а роботизированного тахеометра от 1 до 3 мм, в зависимости от скорости съемки.
Предлагаемое изобретение было создано специалистами Научного центра ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы. Были произведены экспериментальные исследования и расчеты, показавшие возможность использования заявляемого способа для проведения натурных испытаний, дающих объективную оценку.
Изложенное позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2021 |
|
RU2775813C1 |
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2020 |
|
RU2735694C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2019 |
|
RU2723697C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ОТМЕТОК ДОННОЙ И ВОДНОЙ ПОВЕРХНОСТИ ПРИ МОНИТОРИНГЕ ВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2694702C1 |
Изобретение относится к судостроению, а именно к способам натурных испытаний безэкипажных и автономных судов. Способ предназначен для независимого определения тактико-технических характеристик испытуемых судов при их движении и выполнении заданных маневров. Задают курс движения судна и сравнивают его с реальной траекторией движения, определяемой по текущему местоположению объекта. Определение текущего местоположения судна производят с помощью комплекса измерительной аппаратуры, в состав которого входит расположенный на берегу роботизированный тахеометр, работающий в паре с отражательной призмой, установленной на судне с возможностью ориентации в местной и/или относительной системе координат по одному пункту государственной геодезической сети с известными географическими координатами и высотой, а также по заданному направлению стороны света, последующей записи данных о текущем местоположении судна и их передачи на ЭВМ для визуализации, обработки и хранения. Повышается точность результатов испытаний. 1 з.п. ф-лы, 2 ил.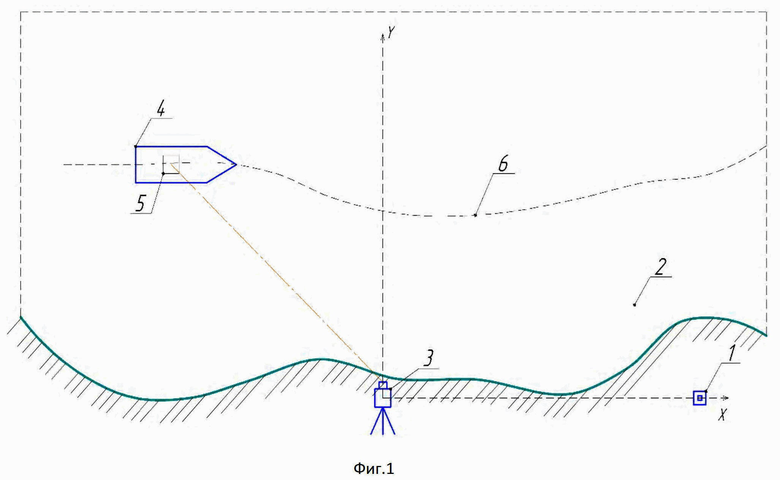
1. Способ натурных испытаний безэкипажных судов, при котором задают курс движения судна и сравнивают его с реальной траекторией движения, определяемой по текущему местоположению объекта, отличающийся тем, что определение текущего местоположения судна производят с помощью комплекса измерительной аппаратуры, в состав которого входит расположенный на берегу роботизированный тахеометр, работающий в паре с отражательной призмой, установленной на судне с возможностью ориентации в местной и/или относительной системе координат по одному пункту государственной геодезической сети с известными географическими координатами и высотой, а также по заданному направлению стороны света, и последующей записи данных о текущем местоположении судна и их передачи на ЭВМ для визуализации, обработки и хранения.
2. Способ по п.1, отличающийся тем, что производят предварительную калибровку и установку прибора на берегу, в выбранной точке, после чего выполняют настройку координатных измерений, определяя их по пункту государственной геодезической сети или локальной геодезической сети и направлениям стороны света, а затем переводят тахеометр в режим слежения за отражательной призмой включением функции «Захват цели».
| Трехходовой клапанный кран для пневматических систем | 1960 |
|
SU144079A1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| JP 201030340 A, 12.02.2010 | |||
| JP 2017165136 A, 21.09.2017. | |||

