Изобретение относится к области машиностроения, в частности к роликовым подшипникам качения, и может быть использовано в узлах механизмов и машин для обеспечения вращательного движения.
Известен подшипник качения, содержащий внутренние и наружные кольца, расположенные между ними тела качения, разделенные сепаратором, датчик угла поворота и скорости вращения внутреннего кольца, встроенные в сепаратор виброрезонансные приводы, выполненные с возможностью создания принудительного вращения тел качения, и датчик угла поворота и скорости вращения сепаратора. (Патент BY №17059, МПК F16C 19/02, опубликовано 30.04.2013 г.).
Недостатком известного подшипника является отсутствие возможности изменения зазора между дорожками и телами качения во время работы.
Техническая задача, которую решает данное изобретение заключается в увеличении ресурса работы конического подшипника качения.
Поставленная задача достигается тем, что конструкция подшипника качения, содержащего внутреннее и наружное кольца, расположенные между ними тела качения, разделенные сепаратором, согласно изобретению подшипник качения содержит устройство перемещения внутреннего кольца, включающее планетарную передачу и электродвигатель, подключенный к блоку управления, сбора и обработки сигналов, который соединен прямой и обратной связью с датчиками температуры, вибрации, перемещения и усилия, встроенных в наружное кольцо.
Технический результат заключается в поддержании рационального зазора между телами и дорожками качения подшипника на всех режимах работы, что приводит к увеличению ресурса работы устройства.
Сущность изобретения поясняется чертежом.
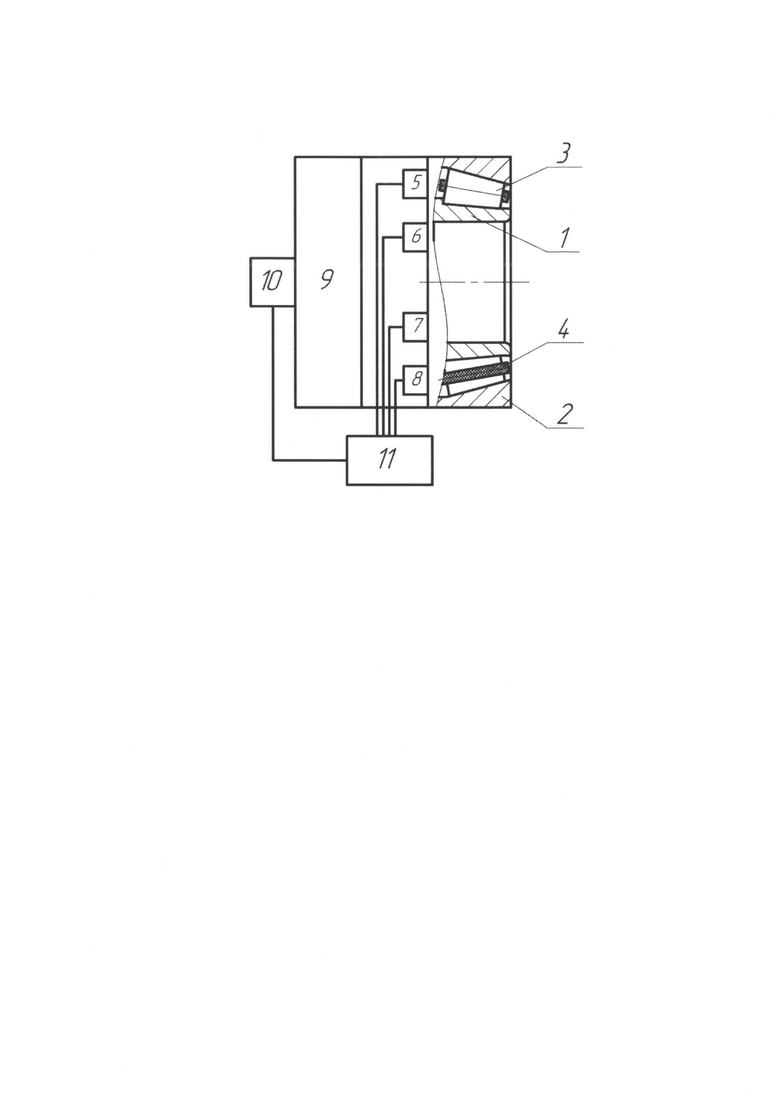
На рисунке изображен мехатронный подшипник качения.
Мехатронный подшипник качения имеет внутреннее 1 и наружное 2 кольца, расположенные между ними телами 3 качения, разделенные сепаратором 4, встроенные в наружное кольцо 2 датчик 5 температуры, датчик 6 вибрации, датчик 7 перемещения, датчик 8 усилия, устройство перемещения внутреннего кольца, состоящее из закрепленной на внутреннем кольце 1 планетарной передачи 9, электродвигателя 10 и электронного блока 11 сбора и обработки сигналов. Датчик 5 температуры, датчик 6 вибрации, датчик 7 перемещения, датчик 8 усилия и электродвигатель 10 соединены прямой и обратной связью с электронным блоком 11 сбора и обработки сигналов.
Работа мехатронного подшипника качения осуществляется следующим образом.
Для увеличения работоспособности в течение заданного срока при установке и последующей работе подшипников качения важен предварительный натяг. Величина предварительного натяга между телами 3 качения, внутренним кольцом 1 и наружным кольцом 2 контролируется датчиком 8 усилия, который передает сигнал в электронный блок 11 сбора и обработки сигналов, где он регистрируется и обрабатывается. В ответ из электронного блока 11 сбора и обработки сигналов, в соответствии с управляемой программой, на электродвигатель 10 подается сигнал, который приводит в действие планетарную передачу 9, и внутреннее кольцо 1 перемещается вдоль оси вращения подшипника, тем самым увеличивая или уменьшая зазор между внутренним кольцом 1 и наружным кольцом 2, что приводит к уменьшению или увеличению натяга.
В процессе вращения тел 3 качения относительно внутреннего 1 и наружного 2 колец происходит диссипация энергии, выражающаяся в выделении тепла. Величина выделяющегося тепла контролируется датчиком 5 температуры, полученный сигнал поступает на электронный блок 11 сбора и обработки сигналов. В случае увеличения температуры выше допускаемого значения электронный блок 11 сбора и обработки сигналов подает управляющий сигнал на электродвигатель 10, который обеспечивает вращение планетарной передачи 9. Планетарная передача 9 перемещает внутреннее кольцо 1, тем самым увеличивая или уменьшая зазор между телами 3 качения, внутренним кольцом 1 и наружным кольцом 2. Величина перемещения внутреннего кольца 1 контролируется датчиком 7 перемещения.
Во время длительной работы происходит износ тел 3 качения, внутреннего кольца 1 и наружного кольца 2. Это приводит к увеличению колебаний, которые контролируются датчиком 6 вибрации. Полученный сигнал передается в электронный блок 11 сбора и обработки сигналов, где он регистрируется и обрабатывается. В ответ из электронного блока 11 сбора и обработки сигналов, в соответствии с управляемой программой, на электродвигатель 10 подается сигнал, который приводит в действие планетарную передачу 9 и внутреннее кольцо 1 перемещается вдоль оси вращения подшипника, тем самым уменьшая зазор между внутренним кольцом 1 и наружным кольцом 2, при этом величина колебаний уменьшается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 2020 |
|
RU2752741C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ОПОРА СКОЛЬЖЕНИЯ | 2023 |
|
RU2822207C1 |
| ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНО-ОПОРНЫХ УЗЛОВ | 2020 |
|
RU2749412C1 |
| МЕХАТРОННАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701744C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ АКТИВНЫХ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ | 2020 |
|
RU2757062C1 |
| ГИБРИДНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ С ИНТЕЛЛЕКТУАЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2821860C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С МНОГОЗОННОЙ ПОДАЧЕЙ СМАЗОЧНОГО МАТЕРИАЛА | 2019 |
|
RU2733996C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИАЛЬНО-ОСЕВЫМИ ДВИЖЕНИЯМИ РОТОРА | 2022 |
|
RU2792850C1 |
| СИСТЕМА ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ | 2021 |
|
RU2783172C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2020 |
|
RU2749362C1 |
Изобретение относится к области машиностроения, в частности к роликовым подшипникам качения, и может быть использовано в узлах механизмов и машин для обеспечения вращательного движения. Мехатронный подшипник качения содержит внутренние и наружные кольца, расположенные между ними тела качения, разделенные сепаратором. Подшипник также содержит устройство перемещения внутреннего кольца, включающее планетарную передачу и электродвигатель, подключенный к блоку управления сбора и обработки сигналов, который соединен прямой и обратной связью с датчиками температуры, вибрации, перемещения и усилия, встроенными в наружное кольцо. Технический результат заключается в поддержании рационального зазора между телами и дорожками качения подшипника на всех режимах работы, что приводит к увеличению ресурса работы устройства. 1 ил.
Мехатронный подшипник качения, содержащий внутреннее и наружное кольца, расположенные между ними тела качения, разделенные сепаратором, отличающийся тем, что он содержит устройство перемещения внутреннего кольца, включающее планетарную передачу и электродвигатель, подключенный к блоку управления, сбора и обработки сигналов, который соединен прямой и обратной связью с датчиками температуры, вибрации, перемещения и усилия, встроенными в наружное кольцо.
| Противогазовая маска | 1917 |
|
SU17059A1 |
| МОДУЛЬ ПОДШИПНИКА С СЕНСОРНЫМ УСТРОЙСТВОМ | 2010 |
|
RU2526319C2 |
| Устройство для контроля перегрева подшипников | 1990 |
|
SU1772441A1 |
| US 6331823 B1, 18.12.2001. | |||

