Изобретение относится к машиностроению, в частности к шарнирным кривошипным механизмам для вращательных приводов и механического оборудования с пространственным движением рабочего органа применительно к разным областям техники.
Известен шарнирный механизм пространственного копирования, содержащий замкнутую кинематическую цепь, включающую сферические шарниры и цилиндрические шарниры с параллельными осями вращения (книга Крайнев А.Ф. Словарь - справочник по механизмам. - Москва, «Машиностроение», 1987, стр. 347, рисунок «б») - аналог.
Недостатками известного шарнирного механизма являются сложность конструкции и большие пространственные габариты в нерабочем положении, а также высокая трудоемкость изготовления и сборки сферических шарниров.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирный механизм, содержащий замкнутую кинематическую цепь, включающую установленные между собой, а также с опорной стойкой и с выходной подвижной платформой посредством 12 сферических шарниров и 24 цилиндрических шарниров (все с параллельными осями вращения) для привода цепи от 6 двигателей (книга Смелягин А.И. «Структура машин, механизмов и конструкций». Учебное пособие. - Москва: ИНФА-М, 2019, с. 154, рис. 2.74) - прототип.
Недостатками указанного шарнирного механизма являются сложность конструкции и системы управления одновременно всеми 6 приводными двигателями, большие пространственные габариты в нерабочем положении, сложность пространственной сборки кинематической цепи, а также ограниченное рабочее пространство движения рабочего органа из-за малых углов поворота сферических шарниров.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, обеспечении компактности шарнирного механизма в нерабочем положении и его складываемость (без разборки кинематической цепи), расширении функциональности и рабочего пространства для применения в разных областях техники.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь механизма выполнена в виде сборки в плоскости рычажных звеньев в изменяемые замкнутые контуры посредством кинематических соединений с различным расположением между собой осей цилиндрических шарниров в виде вращательных кинематических пар для последующего преобразования при повороте этих рычажных звеньев собранной плоской структуры замкнутых контуров цепи в пространственную подвижную структуру кривошипного механизма с пространственным движением выходного звена.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, а также на фиг. 8, где дан вид В на фиг. 7.
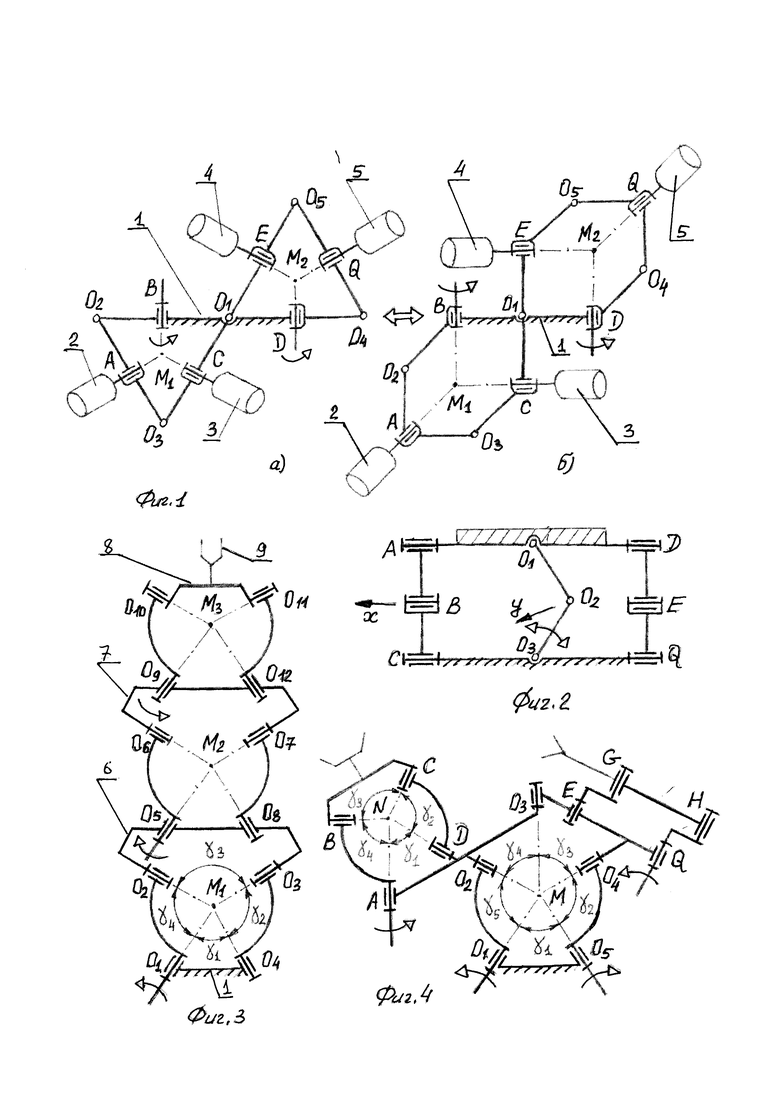
На фиг. 1 изображен общий вид шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде сборки в плоскости (фиг. 1, а) двух сблокированных между собой через опорную стойку 1 шестизвенных замкнутых контуров O1O2O3 и O1O4O5, треугольной формы, собираемых в одной плоскости посредством чередования в этих контурах:
1) Трех цилиндрических шарниров с параллельными между собой осями вращения (это шарниры O1, O2, O3 для контура O1O2O3 и шарниры O1, O4, O5 для другого контура О1О4О5);
2) Трех других цилиндрических шарниров с осями вращения, пересекающимися в одной точке внутри данного замкнутого контура при его сборке в плоскости (это шарниры А, В и С с точкой пересечения М1 для контура O1O2O3 и шарниры D, Е и Q для другого контура O1O4O5).
При повороте ведущих рычажных звеньев BO2 и DO4, собранные в плоскости контуры O1O2O3 и O1O4O5 плоской подвижной структуры в других рабочих положениях (в цикле вращения звеньев шарнирного механизма) автоматически превращаются в пространственную подвижную структуру (фиг. 1, б с возникновением уже в пространстве двух точек пересечения осей вращения шарниров - это точка М1 для одной замкнутого контура и точка М2 для другого замкнутого контура).
Происходящая в предлагаемом шарнирном механизме особой (т.е. переменной внутри цикла) структуры перестройка плоской структуры (в положении сборки) в пространственную структуру (во всех других рабочих положениях рычажных звеньев) может быть реализована для образования пространственного четырехъемкостного смесителя с двумя степенями свободы, в котором месильные емкости 2, 3, 4 и 5 расположены на осях вращения цилиндрических шарниров А, С, Е и Q.
На фиг. 2 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь составлена из двух сблокированных между собой в плоскости замкнутых контуров O1O2O3ABC и O1O2O3DEQ, включающих набор цилиндрических шарниров O1, O2, O3, A, B, C, D, E и Q с осями вращения, соответственно расположенными вдоль двух взаимно-перпендикулярных осей координат «х» и «у» для образования вертикального подъемника с поступательным перемещением грузовой платформы (без применения поступательных кинематических пар).
На фиг. 3 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде последовательно сблокированных между собой в плоскости через шатуны 6 и 7 трех шарнирных сферических четырехзвенников O1O2O3O4, O5O6O7O8 и O9O10O11O12, замкнутые контуры которых содержат цилиндрические шарниры, оси вращения которых установлены с пересечением между собой внутри этих контуров соответственно в точках М1, М2 и М3 и выполнены несоосными с угловым смещением γ между собой, например, равным:
(γ1 - γ2 - γ3 - γ4) = (60° - 90°- 120° - 90°),
для образования пространственного шарнирного сферического манипулятора с тремя степенями свободы и установленным на выходном шатуне 8 рабочим органом 9.
На фиг. 4 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде трех сблокированных между собой в плоскости замкнутых контуров, из которых:
1) Замкнутый контур O1O2O3O4O5 выполнен в виде шарнирного сферического пятизвенника, в котором оси вращения цилиндрических шарниров установлены с пересечением в одной точке М внутри этого контура и выполнены несоосными с угловым смещением γ между собой, равным:
(γ1 - γ2 - γ3 - γ4 - γ5) = (60° - 90° - 60° - 60° - 90°),
2) Замкнутый контур ABCD выполнен в виде шарнирного сферического четырехзвенника, в котором оси вращения цилиндрических шарниров установлены с пересечением в одной точке N внутри этого контура и выполнены несоосными с угловым смещением γ между собой, равным:
(γ1 - γ2 - γ3 - γ4) = (60° - 90° - 120° - 90°),
3) Замкнутый контур EGHQ выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров в плоскости данного замкнутого контура, для образования пространственного манипулятора с четырьмя степенями свободы.
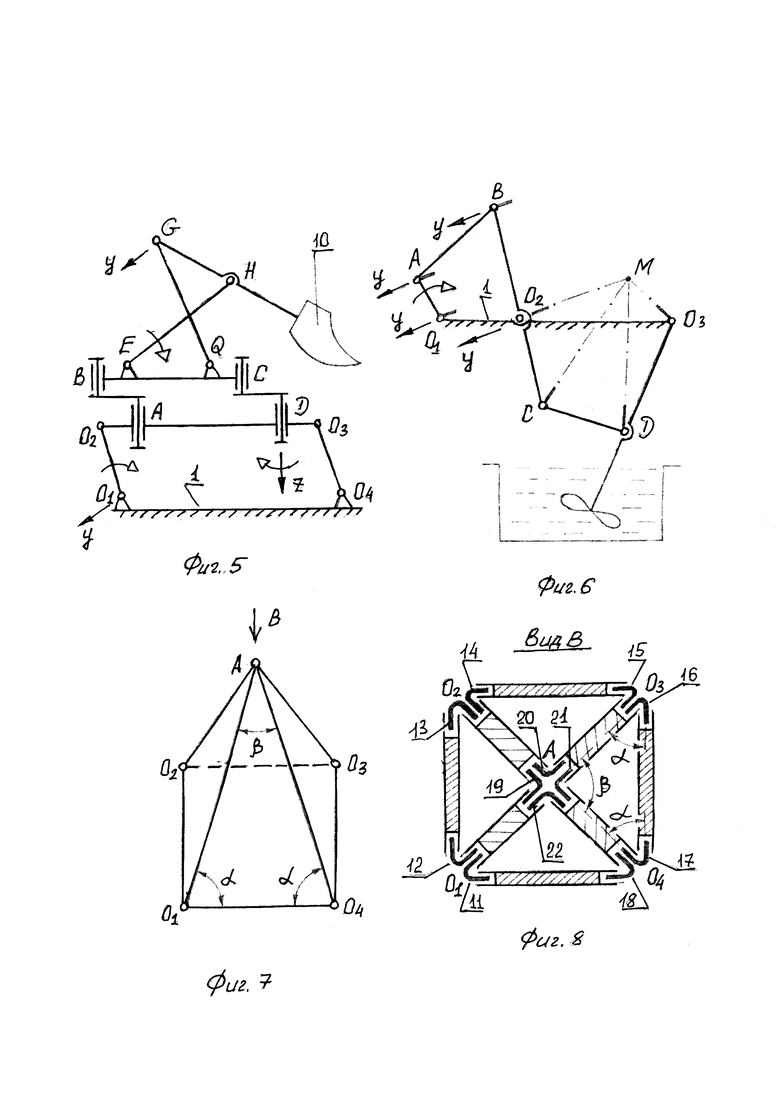
На фиг. 5 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде трех замкнутых контуров, сблокированных между собой при их сборке в плоскости:
1) Замкнутый контур O1O2O3O4 включает опорную стойку 1 и выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль координаты «у».
2) Замкнутый контур ABCD выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль другой координаты «z».
3) Замкнутый контур EGHQ выполнен в виде шарнирного антипараллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль координаты «у», для образования навесного оборудования погрузчика с пространственным перемещением ковша 10.
На фиг. 6 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде двух сблокированных между собой в плоскости через опорную стойку 1 замкнутых контуров:
1) Замкнутый контур O1ABO2 выполнен в виде плоского шарнирного четырехзвенника с параллельными между собой осями вращения цилиндрических шарниров О1, А, В и O2, где все эти оси расположения вдоль «у».
2) Замкнутый контур O2CDO3 выполнен в виде пространственного сферического четырехзвенника с пересечением между собой в одной точке М за пределами этого контура осей вращения цилиндрических шарниров O2, C, D и O3, для образования вертикального смесителя с пространственным движением рабочего органа.
На фиг. 7 и фиг. 8 представлен вариант выполнения шарнирного механизма особой структуры, в котором замкнутая кинематическая цепь выполнена в виде шарнирной четырехугольной пирамиды с основанием O1O2O3O4 и вершиной А, составленной из 8 рычажных звеньев O1O2, O2O3, O3O4 и O4O1 (основание пирамиды), а также O1A, O2A, O3A, O4A (наклонные ребра пирамиды), кинематически связанных между собой в узлах пирамиды О1, O2, O3, O4 и А посредством попарно установленных 8 круглых стержней 11, 12, 13, 14, 15, 16, 17 и 18 (изогнутых под углом α) и 4-х круглых стержней 19, 20, 21 и 22 (изогнутых под углом β) для сборки в узлах пирамиды О1, O2, O3, O4 и А цилиндрических шарниров с попарно параллельными и пересекающимися между собой на вершине пирамиды А осями вращения соединяемых звеньев.
В схеме на фиг. 7 через α и β обозначены углы на треугольной боковой грани пирамиды между основанием и наклонным ребром (угол α) между соседними ребрами на вершине пирамиды (угол β).
Возможность быстрого преобразования (складывания и раскладывания механизма без разборки его замкнутой кинематической цепи) путем перехода объемной пространственной структуры в компактную плоскую структуру при повороте ее рычажных звеньев подтверждена экспериментально на действующих моделях предлагаемых шарнирных механизмов особой структуры.
Достигаемый в предлагаемом шарнирном механизме особой структуры положительный эффект заключается в упрощении конструкции, обеспечении компактности шарнирного механизма в нерабочем положении и его складываемости (без разборки кинематической цепи), расширении функциональности и рабочего пространства в разных областях техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| МНОГОКРАТНЫЙ ЦИЛИНДРИЧЕСКИЙ ШАРНИР | 2021 |
|
RU2760497C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
Изобретение относится к области машиностроения, в частности к шарнирным кривошипным механизмам. Шарнирный механизм изменяемой структуры содержит замкнутую кинематическую цепь, включающую опорную стойку и рычажные звенья, образующие между собой цилиндрические шарниры в виде вращательных кинематических пар. Замкнутая кинематическая цепь выполнена в виде сборки в плоскости рычажных звеньев в изменяемые замкнутые контуры посредством кинематических соединений с различным расположением между собой осей цилиндрических шарниров. В качестве альтернативы замкнутая кинематическая цепь выполнена набором цилиндрических шарниров с осями вращения, расположенными вдоль взаимно перпендикулярных осей координат. Цепь при повороте этих рычажных звеньев собранной плоской структуры замкнутых контуров кинематической цепи преобразуется в пространственную подвижную структуру кривошипного механизма с пространственным движением выходного звена. Достигается упрощение конструкции. 4 з.п. ф-лы, 8 ил.
1. Шарнирный механизм изменяемой структуры, содержащий замкнутую кинематическую цепь, включающую опорную стойку и рычажные звенья, образующие между собой цилиндрические шарниры в виде вращательных кинематических пар, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде сборки в плоскости рычажных звеньев в изменяемые замкнутые контуры посредством кинематических соединений с различным расположением между собой осей цилиндрических шарниров или с набором цилиндрических шарниров с осями вращения, расположенными вдоль взаимно перпендикулярных осей координат, для последующего преобразования при повороте этих рычажных звеньев собранной плоской структуры замкнутых контуров кинематической цепи в пространственную подвижную структуру кривошипного механизма с пространственным движением выходного звена.
2. Шарнирный механизм особой структуры по п. 1, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде двух сблокированных между собой в плоскости через опорную стойку шестизвенных замкнутых контуров треугольной формы, собираемых в плоскости посредством чередования в этих контурах трех цилиндрических шарниров с параллельными между собой осями вращения и трех других цилиндрических шарниров с осями вращения, пересекающимися в одной точке внутри каждого из этих замкнутых контуров, для образования пространственного четырехъемкостного смесителя с двумя степенями свободы.
3. Шарнирный механизм особой структуры по п. 1, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде последовательно сблокированных между собой в плоскости через шатуны нескольких одинаковых, например, трех шарнирных сферических четырехзвеников, замкнутые контуры которых содержат цилиндрические шарниры, оси вращения которых установлены с пересечением между собой в одной точке внутри каждого из этих контуров и выполнены несоосными с угловым смещением γ между собой, например, равным:
(γ1 - γ2 - γ3 - γ4) = (60° - 90° - 120° - 90°),
для образования пространственного шарнирного сферического манипулятора с тремя степенями свободы.
4. Шарнирный механизм особой структуры по п. 1, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде трех сблокированных между собой в плоскости замкнутых контуров, один их которых включает опорную стойку и выполнен в виде шарнирного сферического пятизвенника, в котором оси вращения цилиндрических шарниров установлены с пересечением в одной точке внутри этого замкнутого контура и выполнены несоосными с угловым смещением γ между собой, например, равным:
(γ1 - γ2 - γ3 - γ4 - γ5) = (60° - 90° - 60° - 60° - 90°),
другой замкнутый контур выполнен в виде шарнирного сферического четырехзвенника, в котором оси вращения цилиндрических шарниров установлены с пересечением в одной точке внутри этого контура и выполнены несоосными с угловым смещением γ между собой, например, равным:
(γ1 - γ2 - γ3 - γ4) = (60° - 90° - 120° - 90°),
а третий замкнутый контур выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров в плоскости данного замкнутого контура, для образования пространственного манипулятора с четырьмя степенями свободы.
5. Шарнирный механизм особой структуры по п. 1, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде трех замкнутых контуров, сблокированных между собой при их сборке в плоскости, один из которых включает опорную стойку и выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль координаты «у», другой замкнутый контур выполнен в виде шарнирного параллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль координаты «z», а третий замкнутый контур выполнен в виде шарнирного антипараллелограмма с расположением осей вращения всех его цилиндрических шарниров вдоль координаты «у», для образования навесного оборудования погрузчика с пространственным перемещением ковша.
| КАРКАС БЫСТРОВОЗВОДИМОГО СООРУЖЕНИЯ И СПОСОБ ЕГО МОНТАЖА | 2014 |
|
RU2581909C1 |
| ПРОСТРАНСТВЕННЫЙ ТУРБУЛЕНТНЫЙ СМЕСИТЕЛЬ | 2014 |
|
RU2554584C1 |
| Устройство для срезки голов сваи | 1972 |
|
SU440475A1 |
| ПЫЛЕСОС | 1991 |
|
RU2024236C1 |
| WO 1994026990 A1, 24.11.1994. | |||

