Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения управляемых боеприпасов глобальные спутниковые навигационные системы (ГНСС).
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ поражения объектов артиллерийскими управляемыми боеприпасами (УБП) с использованием ГНСС (см., например, [1]), основанный на определении координат цели, внесении их значений в УБП, запуске УБП, приеме на определенном участке полета УБП сигналов ГНСС, определении по значениям их параметров текущих координат своего местоположения и относительно их значений корректировке полета УБП на цель.
Недостатком способа является низкая помехозащищенность процесса наведения УБП на цель по сигналам навигационных систем.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение помехозащищенности УБП, использующих сигналы навигационных систем.
Технический результат достигается тем, что в известном способе повышения помехозащищенности УБП по навигационным сигналам, основанном на определении координат цели и внесении их значений в УБП, определяют область возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели и вносят их значения в УБП, осуществляют запуск УБП, принимают в i-ые моменты времени УБП навигационные сигналы, измеряют их параметры и определяют по их значениям i-ые координаты пространственного положения УБП, где  , N - количество измеренных координат пространственного положения УБП на дистанции полета от средства запуска до цели, определяют принадлежность i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, если i-ые координаты пространственного положения УБП принадлежат области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, то корректируют относительно i-ых координат пространственного положения УБП траекторию полета УБП в координаты местоположения цели, если i-ые координаты пространственного положения УБП не принадлежат области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, то осуществляют полет УБП без корректировки траектории в координаты местоположения цели.
, N - количество измеренных координат пространственного положения УБП на дистанции полета от средства запуска до цели, определяют принадлежность i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, если i-ые координаты пространственного положения УБП принадлежат области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, то корректируют относительно i-ых координат пространственного положения УБП траекторию полета УБП в координаты местоположения цели, если i-ые координаты пространственного положения УБП не принадлежат области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, то осуществляют полет УБП без корректировки траектории в координаты местоположения цели.
Сущность изобретения заключается в различении истинных от ложных координат пространственного положения УБП, полученных по параметрам навигационных сигналов ГНСС, на основе определения их принадлежности области возможных координат пространственного положения УБП на дистанции полета «средство запуска УБП - цель».
Использование ГНСС в управлении траектории полета высокоточных боеприпасов, обладает определенными преимуществами. Это отсутствие необходимости установки датчика цели и возможность управления полетом на всей траектории полета. Основным недостатком радиоприемных средств потребителей ГНСС является низкая помехоустойчивость, что влияет на точность оценки координат потребителей, в том числе на УБП (см., например, [2], [3, стр. 636-638]). При этом источники помех будут воздействовать на навигационные приемники (НП) всех типов ГНСС, так как в большинстве своем аппаратура потребителей ГНСС может использовать сигналы разнотипных систем. Уровень помехового воздействия определяется различными условиями: структурой сигнала помехи, мощностью сигнала помехи, характеристиками трассы распространения помехового излучения и д.т.(см., например, [3, стр. 636-638]). При этом эффективность помехового воздействия имеет различный уровень. НП одновременно принимают сигналы как элементов ГНСС, так и источников помех 6. В силу «неравномерного» помехового поля, потребителями могут быть определены истинные или ложные координаты своего пространственного положения. Ложные координаты пространственного положения существенно отличаются от истинных и могут быть различены путем пространственной селекции.
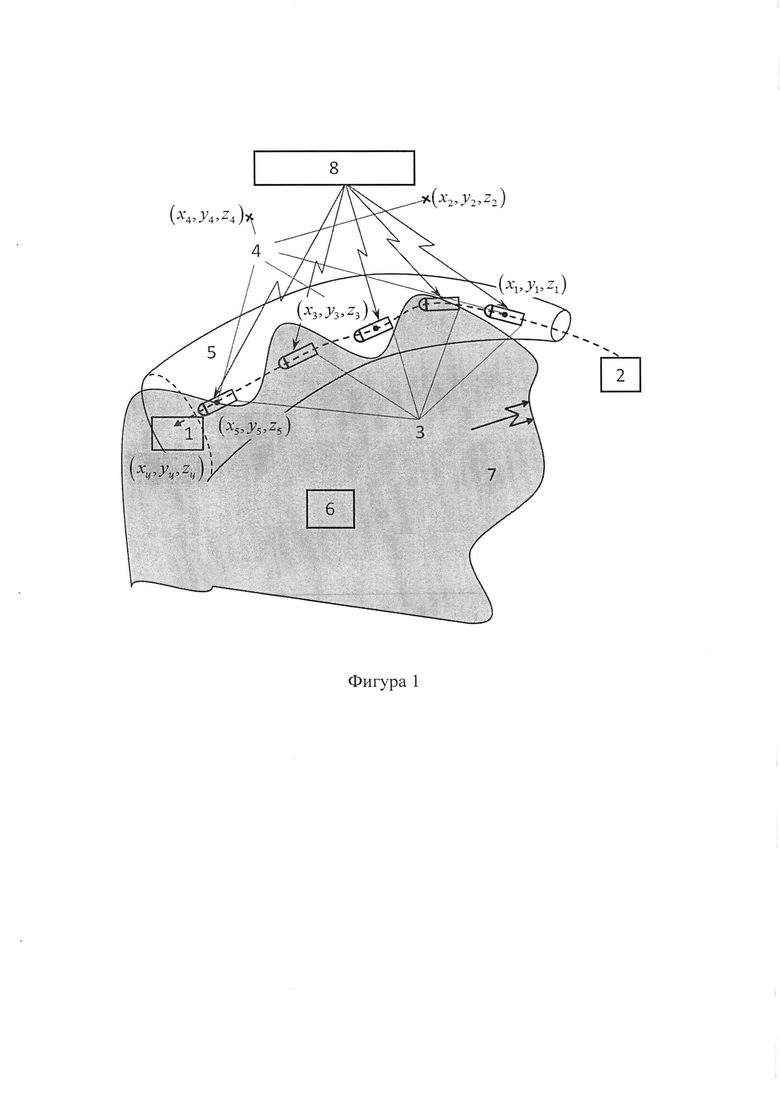
В целом задача поражения цели УБП в предлагаемом способе осуществляется следующим образом (см. фигуру 1, где: 1 - цель; 2 - средство запуска УБП; 3 - УБП; 4 - координаты пространственного положения УБП, определяемые по сигналам ГНСС или средства помех (обозначены координаты: точкой - истинные, крестом - ложные); 5 - область возможных координат пространственного положения УБП; 6 - средство помех; 7 - зона помех; 8 - элементы ГНСС). Предварительно на средстве запуска УБП 2 вносят координаты местоположения цели 1 {хц,yц,zц} в систему наведения УБП 3. Также на средстве запуска УБП 2 определяют область возможных координат пространственного положения 5 УБП 3 на дистанции полета «средство запуска УБП 2 - цель 1» и вносят их значения в систему наведения УБП 3. Осуществляют запуск УБП 3 средством запуска 2. Средство помех 6 осуществляет постановку помех НП УБП 3, формируя неравномерное по мощности поле помех 7. УБП 3 принимает в i-ые моменты времени навигационные сигналы элементов ГНСС 8 или средства помех 6, измеряет их параметры и определяет по их значениям i-ые координаты своего пространственного положения 4 (, N - количество измеренных координат пространственного положения 4 УБП 3 на дистанции полета «средство запуска УБП 2 - цель 1», на фигуре N=5). При этом, в силу влияния помехового поля 7 на НП, на УБП 3 в i-ые моменты времени могут быть определены истинные (на фигуре 1: (x1,y1,z1), (x3,y3,z3), (x5,y5,z5)) или ложные (на фигуре 1: (x2,y2,z2), (х4,y4,z4)) координаты своего пространственного положения 4. Для различения i-ых координат пространственного положения 4 УБП 3 определяет их принадлежность области возможных координат пространственного положения 5 УБП 3 на дистанции полета «средство запуска УБП 2 - цель 1». Если i-ые пространственные координаты положения 4 УБП 3 принадлежат области возможных координат пространственного положения 5, то УБП 3 считает i-ые координаты пространственного положения 4 истинными и корректирует относительно их значений 4 траекторию полета в координаты местоположения цели 1. Если i-ые координаты пространственного положения 4 УБП 3 не принадлежат области возможных координат пространственного положения 5, то УБП 3 считает их значения 4 ложными и осуществляет полет без корректировки траектории в координаты местоположения цели 1.
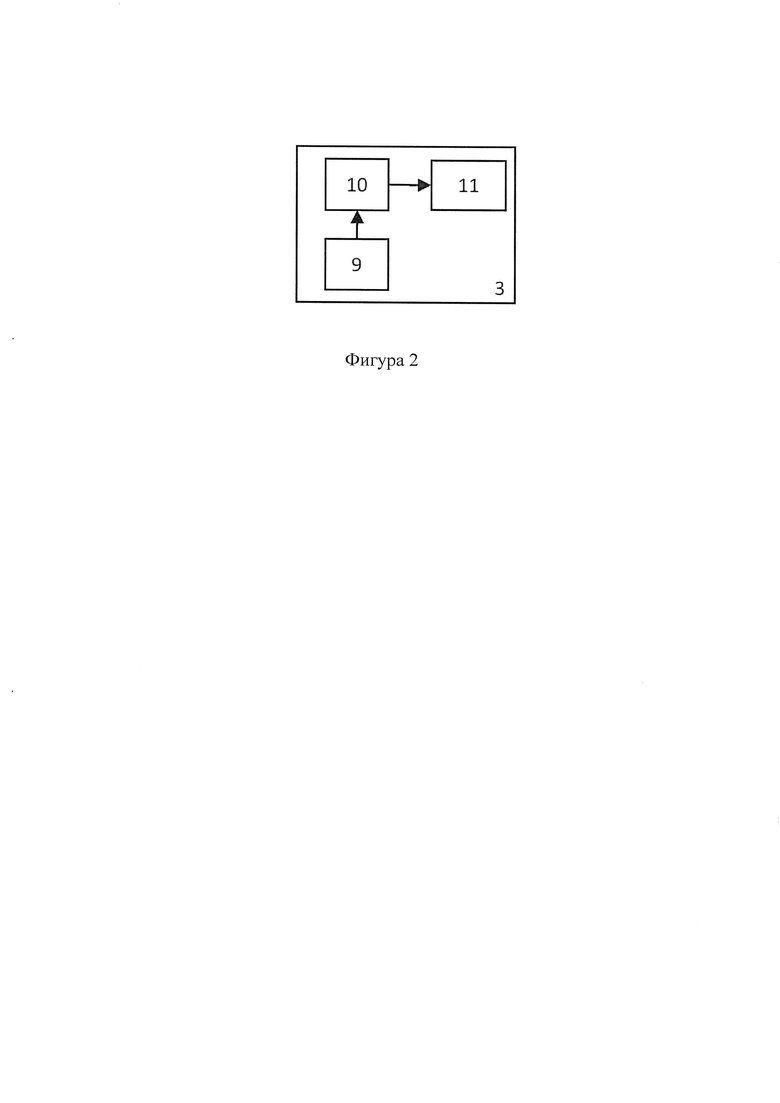
На фигуре 2 изображена блок-схема варианта устройства, реализующего способ. Блок-схема включает: НП 9, бортовой вычислитель 10 (БВ), автопилот 11, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. УБП 3 в процессе полета определяет НП 9 свои координаты пространственно положения, значения которых передает в БВ 10. БВ 10 определяет принадлежность значений координат, полученных НП 9, области возможных координат пространственного положения УБП 3. Если для текущего момента времени значения координат, полученных НП 9, принадлежат области возможных координат пространственного положения УБП 3, то БВ 10 по значениям координат, полученных НП 9, определяет параметры корректировки полета и передает их значения в автопилот 11. Автопилот 11 осуществляет изменение траектории полета УБП 3 в цель. Если для текущего момента времени значения координат, полученных НП 9, не принадлежат области возможных координат пространственного положения УБП 3, то БВ 10 не определяет параметры корректировки полета и УБП 3 осуществляет полет без изменения траектории автопилотом 11.
Таким образом, предлагаемый способ позволяет повысить помехозащищенность УБП, использующих сигналы навигационных систем, за счет различения истинных от ложных координат пространственного УБП на основе определения их принадлежности области возможных координат пространственного положения УБП на дистанции полета «средство запуска - цель». Следовательно, предлагаемый авторами, способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ повышения помехозащищенности УБП, основанный на определении координат цели и внесении их значений в УБП, определении области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели и внесении их значений в УБП, осуществлении запуска УБП, приеме в i-ые моменты времени УБП навигационных сигналов, измерении их параметров и определении по их значениям i-ые координаты пространственного положения УБП, где , N - количество измеренных координат пространственного положения УБП на дистанции полета от средства запуска до цели, определении принадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, корректировке относительно i-ых координат пространственного положения УБП траектории полета УБП в координаты местоположения цели при принадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, осуществлении полета УБП без корректировки траектории в координаты местоположения цели при непринадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели.
, N - количество измеренных координат пространственного положения УБП на дистанции полета от средства запуска до цели, определении принадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, корректировке относительно i-ых координат пространственного положения УБП траектории полета УБП в координаты местоположения цели при принадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели, осуществлении полета УБП без корректировки траектории в координаты местоположения цели при непринадлежности i-ых координат пространственного положения УБП области возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные элементы.
1. Пат. 2664529 RU, МПК F42B 15/00. Управляемый артиллерийский снаряд / В.М. Самусенко, М.В. Самородский, А.Н. Лощенов; заявитель и патентообладатель 3 ЦНИИ МО РФ. - №2017124814; заявл. 11.07.17; опубл. 20.08.18.
2. Журавлев А.В., Неровный В.В. Землянухин В.А. и др. Эффективность функционирования ССФ аппаратуры потребителей ГЛОНАСС в условиях сигналоподобной помехи // А.В. Журавлев, В.В. Неровный, В.А. Землянухин, и др. // Радиотехника. - 2014. - №6. - С.33-35.
3. Куприянов А.И., Шустов Л.Н. Радиоэлектронная борьба. Основы теории / А.И. Куприянов, Л.Н. Шустов. М.: Вузовская книга, 2011. 800 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ АРТИЛЛЕРИЙСКИМИ САМОНАВОДЯЩИМИСЯ БОЕПРИПАСАМИ | 2020 |
|
RU2738330C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2019 |
|
RU2719891C1 |
| СПОСОБ ПОРАЖЕНИЯ ОБЪЕКТОВ УПРАВЛЯЕМЫМИ БОЕПРИПАСАМИ В ЛОКАЛЬНОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 2024 |
|
RU2835023C1 |
| Способ защиты вертолета от управляемых боеприпасов | 2016 |
|
RU2634798C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ | 2015 |
|
RU2593522C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| СПОСОБ НАВЕДЕНИЯ АРТИЛЛЕРИЙСКИХ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ | 2024 |
|
RU2833021C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
Изобретение относится к области огневого поражения объектов и может быть использовано в высокоточных комплексах, использующих на различных этапах наведения управляемых боеприпасов (УБП) глобальные спутниковые навигационные системы. Определяют координаты местоположения цели и вносят их значения в УБП. Определяют область возможных координат пространственного положения УБП на дистанции полета от средства запуска до цели. Вносят их значения в УБП и осуществляют запуск. Принимают в i-е моменты времени УБП навигационные сигналы. Измеряют их параметры и определяют по их значениям i-е координаты пространственного положения УБП. Определяют принадлежность i-х координат положения УБП области возможных координат положения УБП. Корректируют относительно i-х координат положения траекторию полета УБП в координаты местоположения цели при принадлежности i-х координат положения УБП области возможных координат положения УБП. Осуществляют полет УБП без корректировки траектории в координаты местоположения цели при непринадлежности i-х координат положения УБП области возможных координат положения УБП. Повышается помехозащищенность. 2 ил.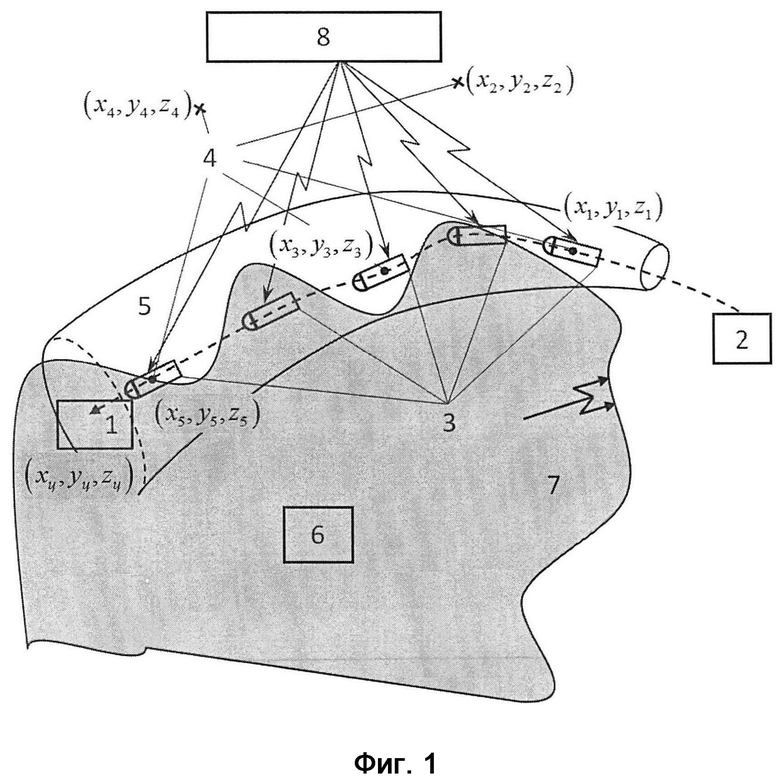
Способ повышения помехозащищенности управляемых боеприпасов по навигационным сигналам, основанный на определении координат местоположения цели и внесении их значений в управляемый боеприпас, отличающийся тем, что определяют область возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели и вносят их значения в управляемый боеприпас, осуществляют запуск управляемого боеприпаса, принимают в i-е моменты времени управляемым боеприпасом навигационные сигналы, измеряют их параметры и определяют по их значениям i-е координаты пространственного положения управляемого боеприпаса, где  , N - количество измеренных координат пространственного положения управляемым боеприпасом на дистанции полета от средства запуска до цели, определяют принадлежность i-х координат пространственного положения управляемого боеприпаса области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, если i-е координаты пространственного положения управляемого боеприпаса принадлежат области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, то корректируют относительно i-х координат пространственного положения траекторию полета управляемого боеприпаса в координаты местоположения цели, если i-е координаты пространственного положения управляемого боеприпаса не принадлежат области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, то осуществляют полет управляемым боеприпасом без корректировки траектории в координаты местоположения цели.
, N - количество измеренных координат пространственного положения управляемым боеприпасом на дистанции полета от средства запуска до цели, определяют принадлежность i-х координат пространственного положения управляемого боеприпаса области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, если i-е координаты пространственного положения управляемого боеприпаса принадлежат области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, то корректируют относительно i-х координат пространственного положения траекторию полета управляемого боеприпаса в координаты местоположения цели, если i-е координаты пространственного положения управляемого боеприпаса не принадлежат области возможных координат пространственного положения управляемого боеприпаса на дистанции полета от средства запуска до цели, то осуществляют полет управляемым боеприпасом без корректировки траектории в координаты местоположения цели.
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2017 |
|
RU2664529C1 |
| СПОСОБ ПУСКА РАКЕТ ДЛЯ ПОДВИЖНЫХ ПУСКОВЫХ УСТАНОВОК | 2012 |
|
RU2504725C2 |
| Способ управления пулей и управляемая пуля | 2019 |
|
RU2719802C1 |
| US 8212195 B2, 03.07.2012 | |||
| WO 2009158087 А1, 30.12.2009. | |||

