Изобретение относится к области подводного судостроения, а точнее к способам и системам регулирования рысканья подводных устройств, и может применяться для управления рысканьем буксируемых подводных объектов.
Известно техническое решение «Буксируемое подводное устройство с горизонтальной стабилизацией» (патент RU №2148003, В63В 21/66, опубл. 27.04.2000, Бюл. №12). Буксируемое подводное устройство с горизонтальной стабилизацией, содержит подводный носитель аппаратуры, снабженный носовым обтекателем и хвостовым стабилизатором и закрепленный на буксирующем кабель-тросе, в носовой и хвостовой частях подводного носителя установлены разгружающие поплавки, а на кабель-тросе размещены отягощающие грузы, компенсирующие выталкивающие силы поплавков.
К недостаткам данного способа стабилизации можно отнести малый диапазон скоростей буксировки, низкую маневренность самой подводной буксируемой системы, за счет того, что заглубитель и подводный объект соединены между собой.
Наиболее близким по технической сущности является «Способ управления дифферентом буксируемого подводного объекта» (патент RU №2657701 С1, опубл. от 14.06.2018). Способ управления дифферентом буксируемого подводного объекта, заключается в расположении узла крепления гибкой связи в верхней части подводного объекта, в выравнивании положения гидродинамическими силами путем компенсирования изменения кабрирующего момента при изменении скорости буксировки, при этом для выравнивания положения подводного объекта в носовой части буксируемого подводного объекта горизонтально располагают вал с возможностью изменения угловой скорости вращения в зависимости от скорости буксировки, при этом в погруженном состоянии осуществляют компенсирование изменений кабрирующего момента при изменении скорости буксировки с помощью гидродинамических сил, возникающих при обтекании вращающегося вала и направленных перпендикулярно к потоку жидкости, которые направляют в сторону, противоположную направлению кабрирующего момента, а угловую скорость вращения вала изменяют в соответствии с изменением скорости буксировки.
К недостаткам данного технического решения можно отнести ограниченную маневренность подводного буксируемого объекта вследствие вращения вала, расположенного горизонтально в носовой части, только по часовой стрелке, что вызывает появление однонаправленной подъемной силы.
Решаемой технической проблемой является создание высокоэффективного способа управления рысканьем буксируемого подводного объекта, позволяющего повысить путевую устойчивость в большом интервале скоростей буксировки, а также увеличить маневренность буксируемого подводного объекта.
Технический результат изобретения заключается в повышении путевой устойчивости буксируемого подводного объекта в большом интервале скоростей буксировки, а также в снижении сопротивления движению подводного объекта со стороны обтекающей его жидкости, в увеличении маневренности подводного объекта.
Технический результат достигается тем, что за счет расположения узла крепления гибкой связи в верхней части подводного объекта на одной вертикали с центром отрицательной плавучести создают момент гидродинамической силы, положение подводного объекта при буксировке выравнивают возникающей при обтекании вращающегося вала подъемной силой, ориентированной по нормали к потоку жидкости, которую направляют в сторону, обратную направлению момента рысканья, при этом для выравнивания положения буксируемого подводного объекта в его носовой части устанавливают вращающийся вал, положение подводного объекта выравнивают установленным вертикально в носовой части вращающимся валом, с возможностью изменения циклической частоты и направления вращения вала, циклическую частоту вращения вала изменяют в зависимости от скорости движения подводного объекта, направление вращения вала изменяют в зависимости от того, в какую сторону необходимо направить подъемную силу. Тем самым повышается управляемость рысканьем в большом интервале скоростей буксировки, создается высокоэффективный способ управления рысканьем буксируемого подводного объекта, также увеличивая его маневренность.
Для пояснения технической сущности к описанию прилагаются следующие чертежи:
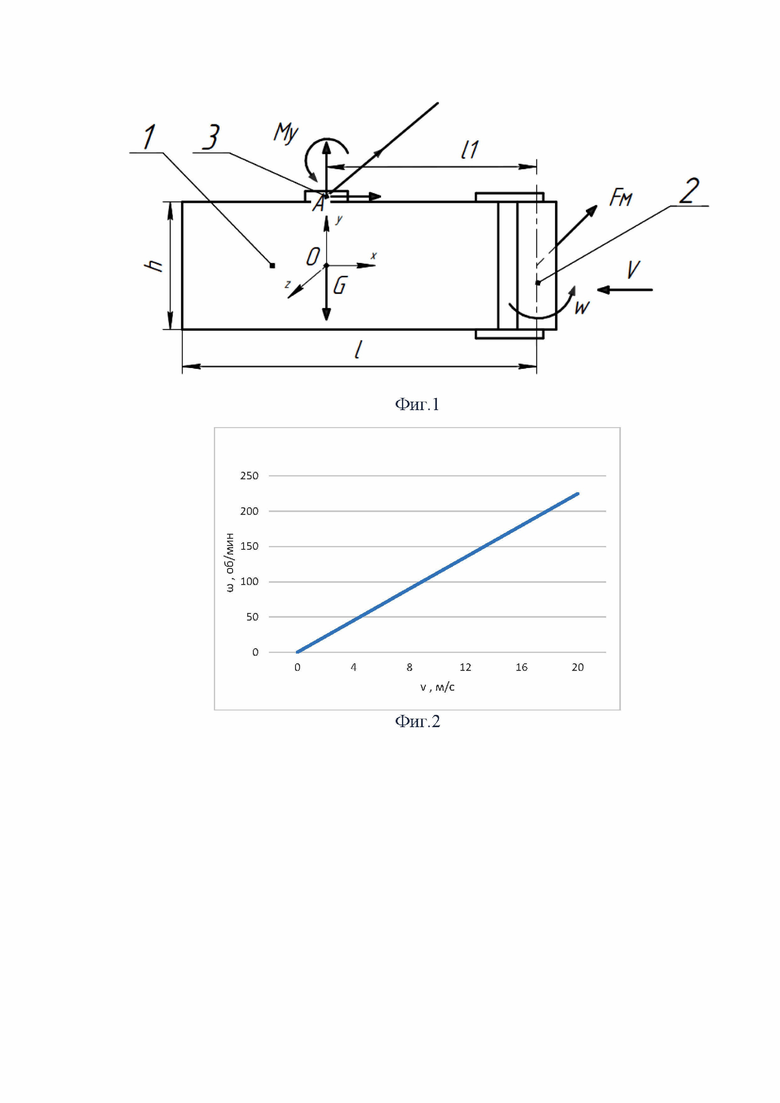
- фиг. 1. Чертеж подводного объекта с указанием схемы сил и моментов;
- фиг. 2. График зависимости  для приведенного в примере буксируемого подводного объекта.
для приведенного в примере буксируемого подводного объекта.
Предлагаемое техническое решение основано на решении задачи управления рысканьем с возможностью использования известного физического явления, называемого эффектом Магнуса, возникающего при обтекании вращающегося тела потоком жидкости или газа и вызывающего появление подъемной силы, воздействующей на вращающееся тело и обращенной по нормали к направлению потока. В эффекте Магнуса взаимосвязаны: направление и скорость набегающего потока, направление и циклическая частота вращения, направление и возникающая сила. Данная взаимосвязь для цилиндра задается следующей формулой (1):
 (1), где:
(1), где:
 ;
;
Sв - площадь цилиндра (вала);
 - циклическая частота вращения цилиндра;
- циклическая частота вращения цилиндра;
ρ - плотность среды;
 - относительная скорость набегающего потока.
- относительная скорость набегающего потока.
Подъемной силой  компенсируется гидродинамическая сила
компенсируется гидродинамическая сила  , определяющая момент рысканья, которая определяется следующей зависимостью (2):
, определяющая момент рысканья, которая определяется следующей зависимостью (2):
 (2), где:
(2), где:
 - коэффициент лобового сопротивления;
- коэффициент лобового сопротивления;
- скорость потока жидкости;
 - площадь сечения по миделю.
- площадь сечения по миделю.
Момент рысканья определяется следующим равенством (3):
 (3), где
(3), где

Момент от подъемной силы можно найти следующим образом (4):
 (4), где
(4), где
 .
.
Исходя из равенства момента рысканья и момента от подъемной силы имеем равенство (5):
 (5)
(5)
или

Если представить как  , а
, а  , то равенство (6) примет вид (7):
, то равенство (6) примет вид (7):
 (7), после преобразования (7) получаем (8):
(7), после преобразования (7) получаем (8):
 (8)
(8)
Сущность предлагаемого технического решения поясняется эскизом, приведенным на фиг.1, где:
1 - подводный объект;
2 - вращающийся вал;
3 - узел крепления с буксирующим тросом.
Способ управления рысканьем буксируемого подводного объекта реализуют следующим образом:
В носовой части подводного объекта 1 вертикально устанавливают вращающийся вал 2. При буксировке на низких скоростях путевую устойчивость подводного объекта обеспечивают благодаря тому, что точку закрепления А буксирующего троса 3 располагают на одной вертикали с центром отрицательной плавучести (точка О) (т.е. центром приложения равнодействующей силы веса G и водоизмещения) и над ним. При увеличении скорости буксировки повышается момент рысканья  , стремящийся увести за собой переднюю часть подводного объекта вправо/влево. В то же время с увеличением скорости буксировки возрастает подъемная сила
, стремящийся увести за собой переднюю часть подводного объекта вправо/влево. В то же время с увеличением скорости буксировки возрастает подъемная сила  , уводящая носовую часть влево/вправо. При заданном соотношении циклической частоты вращения вала и направления его вращения подъемная сила уравновешивает момент рысканья и позволяет подводному объекту держаться заданной траектории (по рысканью). При существенном повышении скорости буксировки для выравнивания подводного объекта по рысканью, для увеличения подъемной силы , компенсирующей момент
, уводящая носовую часть влево/вправо. При заданном соотношении циклической частоты вращения вала и направления его вращения подъемная сила уравновешивает момент рысканья и позволяет подводному объекту держаться заданной траектории (по рысканью). При существенном повышении скорости буксировки для выравнивания подводного объекта по рысканью, для увеличения подъемной силы , компенсирующей момент , увеличивают циклическую частоту вращения вала w и, при изменении направления момента рысканья, изменяют направление вращения вала 2. Все это позволяет повысить управляемость по рысканью в большом диапазоне скоростей буксировки, тем самым сделав способ управления путевой устойчивостью буксируемого подводного объекта высокоэффективным, а также увеличив маневренность подводного объекта.
, увеличивают циклическую частоту вращения вала w и, при изменении направления момента рысканья, изменяют направление вращения вала 2. Все это позволяет повысить управляемость по рысканью в большом диапазоне скоростей буксировки, тем самым сделав способ управления путевой устойчивостью буксируемого подводного объекта высокоэффективным, а также увеличив маневренность подводного объекта.
Пример 1.
Пример выполнения ориентации буксируемого подводного объекта рысканью для ПО с размерами 1×1×1 м. Закрепление троса в средней верхней части буксируемого подводного объекта (с плечом гидродинамической силы  =0,5 м). Для компенсирования посередине носовой части располагают вал с приводом от электродвигателя с возможностью регулирования оборотов и направления вращения. Пусть вал имеет размеры: длина
=0,5 м). Для компенсирования посередине носовой части располагают вал с приводом от электродвигателя с возможностью регулирования оборотов и направления вращения. Пусть вал имеет размеры: длина  =1м, радиус
=1м, радиус  =0,1 м. Для случая установки вала в средней части плечом
=0,1 м. Для случая установки вала в средней части плечом  .Циклическую частоту вращения вала ω, необходимую для уравнивания момента по рысканью определяют из равенства
.Циклическую частоту вращения вала ω, необходимую для уравнивания момента по рысканью определяют из равенства  =, то есть,исходя из формулы (8) получают зависимость (9):
=, то есть,исходя из формулы (8) получают зависимость (9):
 (9).
(9).
При подстановке численных значений плеч (=0,5 м и ), длины вала (=1 м) и  =1.5 получим зависимость (10) циклической частоты вращения вала, необходимой для поддержания путевой устойчивости подводного объекта от скорости его буксировки:
=1.5 получим зависимость (10) циклической частоты вращения вала, необходимой для поддержания путевой устойчивости подводного объекта от скорости его буксировки:
 (10)
(10)
Зависимость для приведенного в примере буксируемого подводного объекта представлена на фиг. 2.
В результате имеется возможность путевого управления буксируемого подводного объекта с узлом крепления троса в верхней части в большом интервале скоростей буксировки, без увеличения гидродинамического сопротивления, т.к. изменение положения буксируемого подводного объекта по рысканью происходит только в результате изменения угловой скорости и направления вращения вала. Кроме того, появляется возможность оперативного воздействия на рысканье буксируемого подводного объекта, подстраивания буксируемого подводного объекта под изменения курса буксирующего объекта, повышается маневренность буксируемого подводного объекта.
По сравнению с известными аналогами, заявляемое техническое решение способа позволяет управлять рысканьем подводного объекта в большом диапазоне скоростей буксировки в результате выравнивания положения буксируемого подводного объекта за счет уравнивания изменений момента рысканья при изменении скорости буксировки, путем изменения направления вращения вала и изменения циклической частоты вращения вала в соответствии с изменением направления момента рысканья и скорости буксировки, что обеспечивает высокую эффективность «Способа управления рысканьем буксируемого подводного объекта».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1995 |
|
RU2096246C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ НОСИТЕЛЬ ДЛЯ ГИДРОНАВТОВ | 1993 |
|
RU2070130C1 |
| Устройство для буксировки плавучих объектов | 1987 |
|
SU1505836A1 |
| Буксирное устройство подводной лодки | 2020 |
|
RU2746865C1 |
Изобретение относится к области подводного судостроения и касается регулирования рысканья подводных устройств. Предложен способ управления рысканьем буксируемого подводного объекта, заключающийся в том, что за счет расположения узла крепления гибкой связи в верхней части подводного объекта на одной вертикали с центром отрицательной плавучести создают момент гидродинамической силы, положение подводного объекта при буксировке выравнивают возникающей при обтекании вращающегося вала подъемной силой, ориентированной по нормали к потоку жидкости, которую направляют в сторону, обратную направлению момента рысканья, при этом для выравнивания положения буксируемого подводного объекта в его носовой части устанавливают вращающийся вал, положение подводного объекта выравнивают установленным вертикально в носовой части вращающимся валом с возможностью изменения циклической частоты и направления вращения вала, циклическую частоту вращения вала изменяют в зависимости от скорости движения подводного объекта, направление вращения вала изменяют в зависимости от того, в какую сторону необходимо направить подъемную силу. Технический результат заключается в повышении путевой устойчивости буксируемого подводного объекта, в снижении сопротивления движению подводного объекта, в повышении маневренности подводного объекта. 2 ил.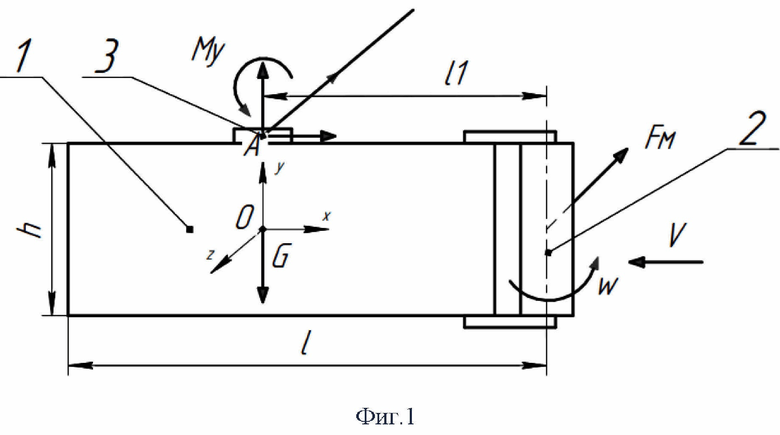
Способ управления рысканьем буксируемого подводного объекта, заключающийся в том, что за счет расположения узла крепления гибкой связи в верхней части подводного объекта на одной вертикали с центром отрицательной плавучести создают момент гидродинамической силы, положение подводного объекта при буксировке выравнивают возникающей при обтекании вращающегося вала подъемной силой, ориентированной по нормали к потоку жидкости, которую направляют в сторону, обратную направлению момента рысканья, при этом для выравнивания положения буксируемого подводного объекта в его носовой части устанавливают вращающийся вал, отличающийся тем, что положение подводного объекта выравнивают установленным вертикально в носовой части вращающимся валом с возможностью изменения циклической частоты и направления вращения вала, циклическую частоту вращения вала изменяют в зависимости от скорости движения подводного объекта, направление вращения вала изменяют в зависимости от того, в какую сторону необходимо направить подъемную силу.
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| ОПУСКНОЕ ПОДВОДНОЕ УСТРОЙСТВО | 2013 |
|
RU2543118C2 |
| ПОДВОДНЫЙ БУКСИРУЕМЫЙ АППАРАТ | 1990 |
|
RU2096245C1 |
| US 4463701 A, 07.08.1984. | |||

