Изобретение относится к области навигационных систем и может быть использовано для локального позиционирования наземных объектов с относительно постоянной высотой расположения антенны в горизонтальной плоскости (в плане) в условии возможных помех на ограниченных территориях и в закрытых помещениях, где определение координат объектов с помощью глобальной навигационной спутниковой системы (ГНСС) затруднено либо нецелесообразно.
В большинстве локальных навигационных систем (ЛНС) применяют способы позиционирования, основанные на вычислениях, где в качестве исходной информации используют координаты базовых узлов (БУ) с дальномерными модулями и расстояния от них до позиционируемого объекта. Чаще всего для определения этих расстояний используют методы, основанные на степени падения мощности принимаемого сигнала RSS (received signal strength), либо времени его задержки TOA (time of arrival).
Классический латерационный (основанный на определении расстояний) способ позиционирования объектов в ЛНС предполагает решение системы уравнений, определяющих точку пересечения 3-х (при возможности отсева побочного решения) либо более сфер:
где:
{X,Y,Z} - искомые координаты позиционируемого объекта,
{xi, yi, zi, ri,} - известные координаты i-го базового узла (БУ) и соответствующее ему расстояние до объекта.
При числе уравнений (1) более 3-х создается избыточность условий, при которых приближенное решение может быть найдено с использованием метода наименьших квадратов. Указанный способ с успехом используют при позиционировании объектов ГНСС (ГЛОНАСС, GPS). Если точки контролируемой области доступны для связи с не менее чем тремя БУ, а расстояния между антеннами БУ и позиционируемым объектом найдены достаточно точно, то решение системы (1) позволяет получить и для ЛНС метровую, а то и дециметровую точность. Однако в реальных условиях наземного позиционирования точно определить расстояние между хотя бы тремя БУ и объектом удается очень редко. Особенно это касается подвижного объекта. Ведь даже при отсутствии препятствий (line-of-sight - LOS) не всегда удается избавиться от многолучевости и учесть лишь прямой путь прохождения сигнала, а малейшие изменения в обстановке (движение человека либо качание листвы на пути сигнала) увеличивают время его прохождения и завышают расчетные расстояния. Из-за препятствий между антеннами БУ и объектом (Non-line-of-sight - NLOS) и многолучевости практически все методы определения расстояний для наземных объектов в ЛНС по большей части дают отклонения в большую сторону (И.Е. Монвиж-Монтвид. Особенности локального позиционирования объекта в условиях его прямой видимости со стороны стационарных модулей.//Труды XII Российской научно - технической конференции «Новые информационные технологии в системах связи и управления». - Калуга, 2013. стр. 421).
Таким образом, в реальных условиях все значимые отклонения расстояний идут в большую сторону, причем в ЛНС величина этих отклонений, особенно в помещениях, вполне сравнима с величиной самих расстояний. В результате, чувствительная к ошибкам начальных параметров система (1) может давать значительную погрешность либо вообще не иметь решения.
При таких условиях возможен лишь вероятностный расчет, а реальное положение объекта следует искать в области общей для всех образующих сфер. Эту область определяют системой неравенств:
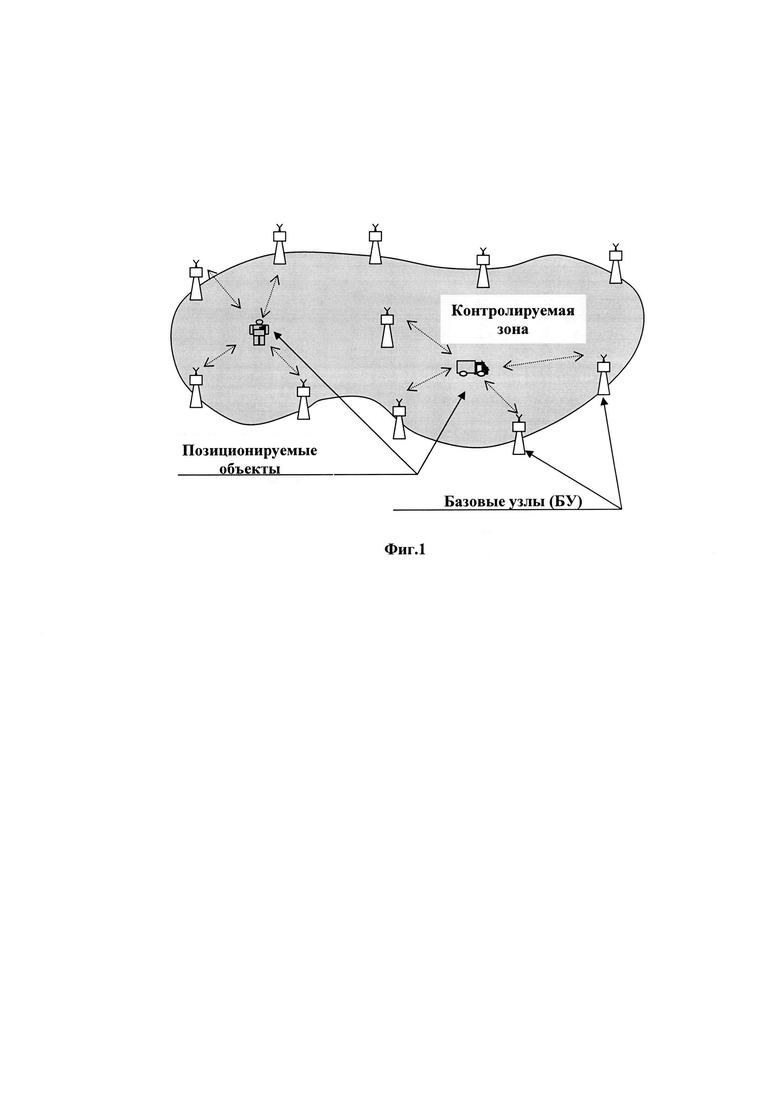
Но эффективно использовать систему (2) можно лишь тогда, когда используемые БУ окружают объект в пространстве со всех сторон. В реальности же все БУ, используемые для наземного позиционирования в ЛНС, как правило, располагают выше объекта, что существенно расширяет расчетную область его расположения описанным способом и снижает эффективность метода. С другой стороны, наземное позиционирование объекта с его относительно постоянной высотой расположения антенны (Z) позволяет свести определение области расположения объекта к двумерному варианту, при котором БУ могут быть расположены так, чтобы объект в горизонтальной проекции просматривался с разных сторон на всей контролируемой области (Фиг. 1). При этом плановые координаты объекта будут находиться в общей для образующих окружностей области:
где радиусы образующих окружностей определяют соотношениями:

Следует отметить, что использование формулы (4), в основном, характерно для позиционирования в зданиях, в то время как на открытой местности, где область позиционирования достаточно удалена от БУ, по большей части коррекцией радиусов можно пренебречь: Ri≈ri.
Наиболее близким к предлагаемому способу является способ позиционирования объектов, основанный на алгоритмах проекции на выпуклые множества (Projections onto Convex Sets - POCS) (Дардари Д. Методы спутникового и наземного позиционирования. Перспективы развития технологий обработки сигналов. М, Техносфера, 2012, с. 187, 188).
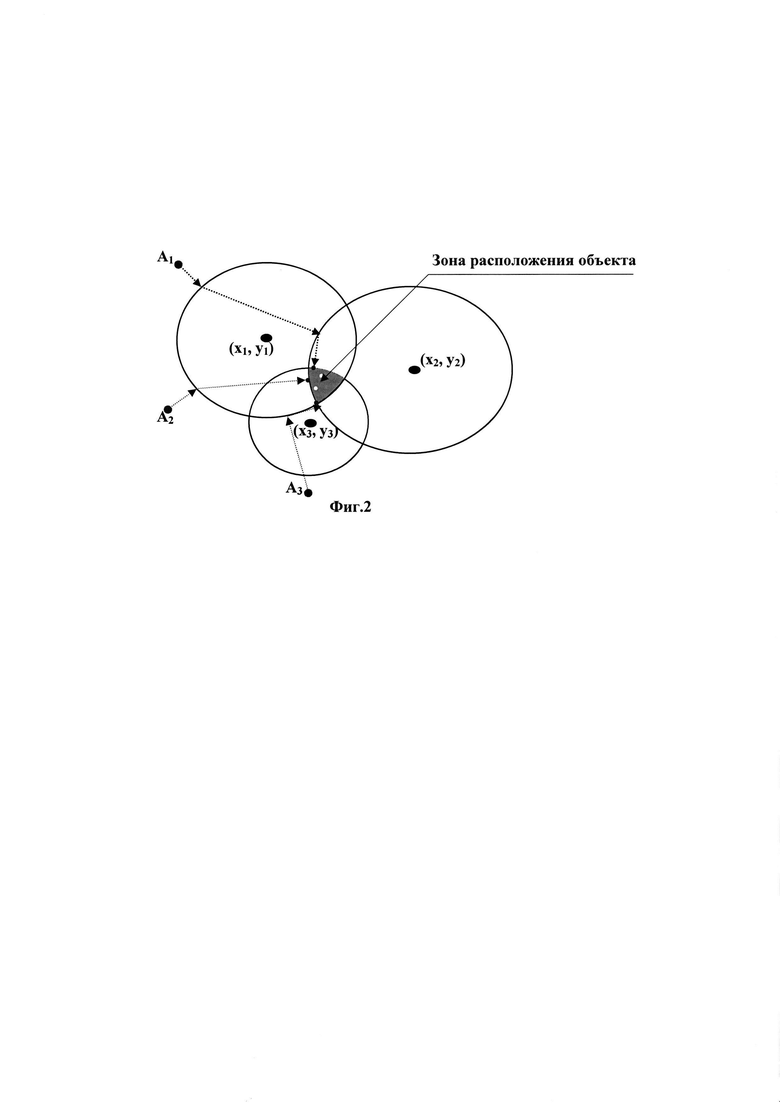
В классическом круговом алгоритме POCS для двумерного варианта в качестве выпуклых множеств используют окружности, образованные проекциями найденных расстояний от позиционируемого объекта до базовых узлов с известными координатами. Произвольная точка плоскости последовательно проецируется на окружности, вне которых она расположена, до тех пор, пока не останется окружности вне последней проекции, либо число итераций не превысит допустимые пределы (Фиг. 2). При выборе исходной позиции (А1, А2, А3) за пределами хотя бы одной из окружностей процесс проецирования будет сходиться к точке, расположенной на границе области, определяемой системой неравенств (3). В приведенном примере исходные позиции А1, А2 непосредственно сходятся на 3-ем и 2-ом шаге к общей для окружностей границе, а с позиции А3 процесс сходится к точке пересечения 1-ой и 2-ой окружностей путем последовательного приближения (показано начало процесса). В идеале, когда позиционируемый объект располагается внутри области ограниченной БУ, а все образующие окружности пересекаются в одной точке (объекте), процесс проецирования с любого места сходится к этой точке.
Алгоритм прост в реализации, при достаточном числе БУ устойчив к отдельным завышенным оценкам расстояния и в большинстве случаев позволяет получить удовлетворительную точность позиционирования объектов, расположенных внутри зоны ограниченной базовыми узлами.
Недостатками однократного применения POCS при его реальном использовании в условиях NLOS являются:
- неизвестная область возможного расположения объекта;
- заведомо завышенная погрешность позиционирования, определяемая наибольшим расстоянием между точками возможной области расположения;
- неизвестные предельные отклонения расчетного значения от реальной позиции.
Цель изобретения - повышение точности горизонтального позиционирования в условиях возможных помех, определение зоны возможного расположения объекта и величины его максимального отклонения.
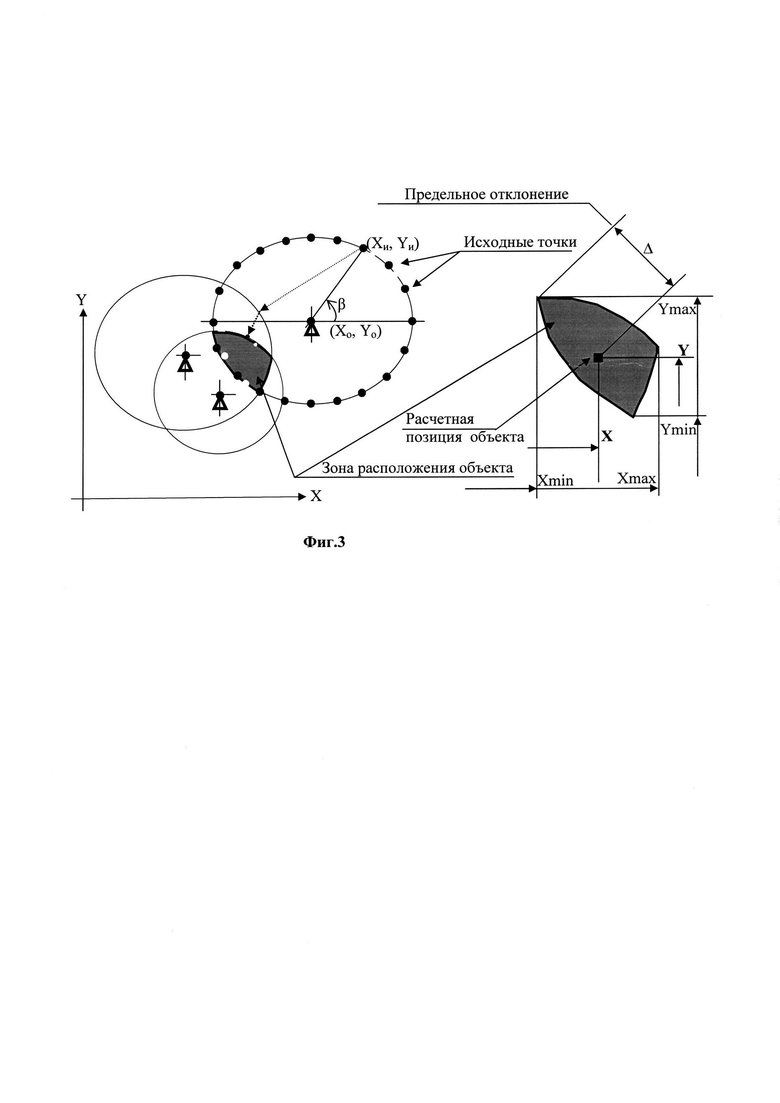
Для достижения цели предложен машинно-ориентированный способ локального позиционирования наземных объектов на основе дальномерных вычислений (фиг. 3), заключающийся в том, что вычисляют зону возможного расположения объекта, и на ее основе находят оптимальную позицию объекта и возможное отклонение. При этом зону возможного расположения определяют с помощью многократного использования алгоритма кругового POCS с поверхности одной из образующих окружностей, за координаты объекта принимают координаты, усредняющие крайние значения зоны в направлении каждой из координатных осей и затем определяют максимальное отклонение в плане.
Предлагаемый способ состоит из следующих шагов:
Шаг 1. Определяют радиусы образующих окружностей по формулам (4), выбирают одну из этих окружностей в качестве исходной замкнутой области, заведомо включающей зону расположения объекта, инициализируют начальную позицию на исходной области.
Шаг 2. Применяют алгоритм POCS с очередной начальной позиции, расположенной на исходной области и получают очередную i-ю граничную точку зоны расположения объекта (xi, yi). При этом итерационный шаг получения следующей точки приближения к граничной области сводят к проверке принадлежности предыдущей точки приближения к внутренней области очередной окружности и, при невыполнении этого условия, к совместному решению уравнений окружности и прямой, соединяющей предыдущую точку с центром рассматриваемой окружности. Процесс прекращают, когда на очередном шаге не останется окружностей вне последней точки либо число итераций не превысит заданный предел. Сравнивают координаты (xi, yi) с ранее полученными предельными значениями и запоминают координаты (xi, yi) и новые предельные значения: Xmin, Xmax, Ymin, Ymax.
Шаг 3. Пока исходная (начальная) область до конца не просканирована - осуществляют вычисление с требуемым дискретным шагом следующей начальной позиции и возврат к шагу 2; после завершения сканирования - переходят к шагу 4. При этом очередную точку сканирования получают приращением очередного угла азимута β, изменяя его с заданным шагом от 0° до 360°, а очередные координаты исходных точек определяют по формулам:

где (Х0, Y0) - координаты центра начальной окружности, a R - радиус начальной окружности.
Шаг 4. На основе полученных предельных координат зоны расположения объекта вычисляют позицию объекта:

Шаг 5. На основе координат объекта и массива координат зоны (xi, yi) определяют максимальную горизонтальную погрешность расположения объекта:

Достигаемым техническим результатом предлагаемого машинно-ориентированного способа локального позиционирования наземных объектов на основе дальномерных вычислений является повышение точности горизонтального позиционирования, определение зоны возможного расположения объекта и величины его максимального отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов | 2015 |
|
RU2608176C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА С ПОМОЩЬЮ ДАЛЬНОМЕРНО-УГЛОМЕРНЫХ ПРИБОРОВ | 2014 |
|
RU2567865C1 |
| Способ позиционирования подвижного объекта на основе видеоизображений | 2018 |
|
RU2696009C1 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| Способ позиционирования подвижного объекта | 2017 |
|
RU2656361C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
Изобретение относится к области навигационных систем и может быть использовано для локального позиционирования наземных объектов с относительно постоянной высотой расположения антенны в горизонтальной плоскости (в плане) при условии возможных помех на ограниченных территориях и в закрытых помещениях, где определение координат объектов с помощью глобальной навигационной спутниковой системы (ГНСС) затруднено либо нецелесообразно. Техническим результатом является повышение точности горизонтального позиционирования, определение зоны возможного расположения объекта и величины его максимального отклонения. В машинно-ориентированном способе локального позиционирования наземных объектов на основе дальномерных вычислений с помощью многократного использования алгоритма кругового POCS с поверхности, заведомо содержащей зону расположения объекта, определяют зону возможного расположения объекта, на основе которой, усредняя координаты крайних точек зоны, определяют координаты объекта и вычисляют возможные отклонения. 2 з.п. ф-лы, 3 ил.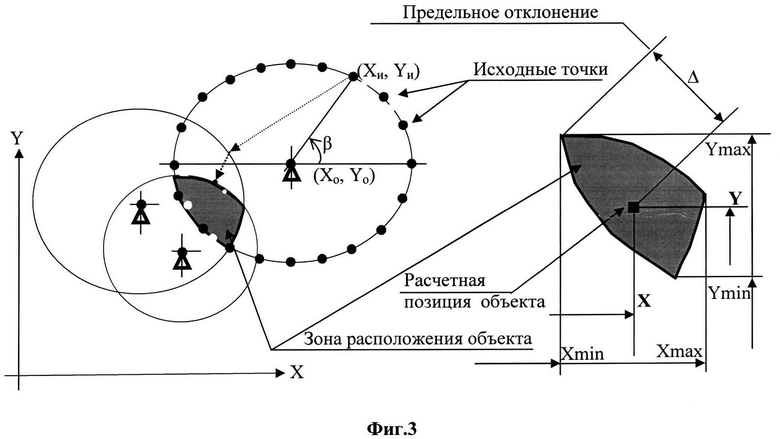
1. Машинно-ориентированный способ локального позиционирования наземных объектов на основе дальномерных вычислений, использующий в качестве исходной информации координаты базовых узлов с дальномерными модулями и расстояния от них до позиционируемого объекта и применяющий для позиционирования алгоритм проекции на выпуклые множества (POCS), отличающийся тем, что круговой алгоритм POCS используют многократно с поверхности, заведомо содержащей зону расположения объекта, для определения на горизонтальной плоскости зоны возможного расположения объекта, определяемой пересечением образующих окружностей с радиусами, определенными проекциями на горизонтальную плоскость дальномерных вычислений, и с центрами в проекциях базовых узлов с известными координатами, а за координаты объекта принимают координаты, равноудаленные от крайних точек полученной зоны в направлении каждой из координатных осей.
2. Способ по п. 1, отличающийся тем, что в качестве поверхности, заведомо содержащей зону расположения объекта, используют одну из образующих окружностей, а начальные позиции, используемые в алгоритмах POCS, получают сканированием с определенным шагом с поверхности выбранной окружности.
3. Способ по п. 1, отличающийся тем, что за максимальное отклонение объекта принимают расстояние от расчетной позиции до максимально удаленной точки зоны расположения объекта.
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство | 2018 |
|
RU2670142C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| MATS RYDSTRОM, LUCA REGGIANI, ERIK STRОM, ARNE SVENSSON | |||
| Adapting the ranging algorithm to the positioning technique in UWB sensor networks // Wireless Personal Communications, 10.2008, Vol | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |

