Изобретение относится к платформенным рычажным многоконтурным механизмам параллельной структуры и может быть использовано в робототехнике, автоматических линиях, обрабатывающих центрах и технологических установках для смещения между собой двух подвижных объектов и разных рабочих органов.
Известен платформенный механизм для движения и позиционирования зажатого элемента в пространстве, содержащий опорное основание и подвижную платформу, соединенные между собой посредством шести раздвижных опорных ног, двенадцати сложных сферических шарниров с приводом от шести линейных двигателей в виде гидроцилиндров (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа. 1996, с. 28, рис. 1.20, схема «Платформа Стюарта») - аналог.
Недостатками известного платформенного механизма являются сложная конструкция и система управления одновременно всеми шестью приводными двигателями, а также ограниченная зона рабочего пространства из-за возможности относительного манипулирования только одной платформой.
Наиболее близким по своей сущности и достигаемому эффекту к предлагаемому изобретению является платформенный механизм относительного манипулирования, содержащий опорное основание и приводное исполнительное устройство, выполненное в виде подвижной платформы с одним рабочим органом, кинематически связанной с опорным основанием через расположенные вокруг этой платформы сферические шарниры для ее относительного манипулирования вокруг основания (статья Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)» / Вестник Сибирского государ. Ун-та, 2012. Вып. 4, с. 46-50, рис. 1) - прототип.
Недостатками указанного платформенного механизма относительного манипулирования являются:
1. Сложная конструкция изготовления и сборки всех трех применяемых сферических шарниров, требующих очень точного пересечения всех трех осей в одной точке и для всех внутренних и наружных сферических поверхностей (US Patent No. 4,628,765/1986).
2. Ограниченная эксплуатационная эффективность из-за возможности привода только одного рабочего органа в виде перемещаемой подвижной платформы при ее ограниченном манипулирования только относительно неподвижного опорного основания.
3. Сложная система управления из-за связанной кинематики всех приводных двигателей, требующей их одновременного регулирования.
4. Ограниченная до нуля узким конусом рабочая зона перемещения установленного рабочего органа (график на рис. 4 в указанной статье Мирзаева Р.А. и др. / Вестник СГАУ. 2012. Вып. 4).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции за счет применения всех простых цилиндрических шарниров с параллельными осями вращения, упрощении управления путем раздельной кинематики привода, в также расширения функциональности и рабочего пространства механизма за счет суммирования рабочих зон.
Получение технического результата достигается за счет того, что платформенный механизм относительного манипулирования содержит опорное основание и приводное исполнительное устройство выполнено в виде двух шарнирно-сочлененных между собой платформ, кинематически связанных с опорным основанием посредством подвижных стержневых опор, составляющих замкнутую кинематическую цепь, звенья которой образуют вращательные кинематические пары для сборки цилиндрических шарниров с параллельными между собой осями вращения.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9 и фиг. 10.
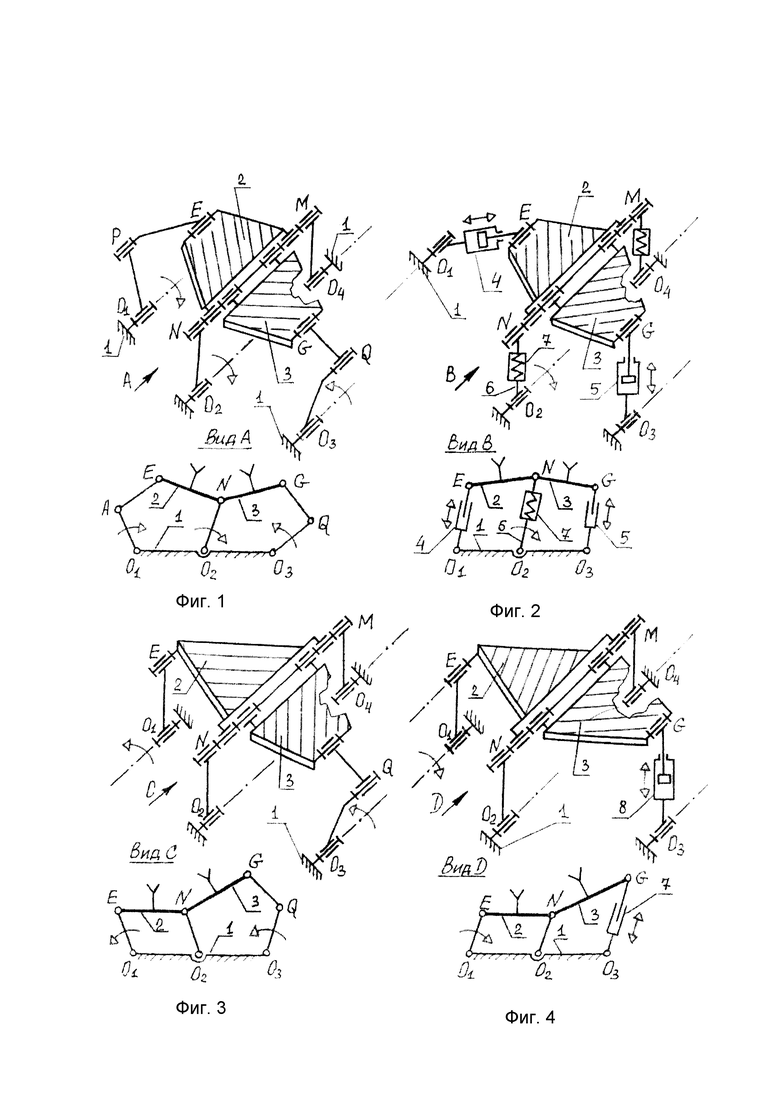
На фиг. 1 представлен общий вид платформенного механизма относительного манипулирования (тип А-1), содержащего опорное основание 1 и приводное исполнительное устройство, выполненное в виде двух шарнирно-сочленных между собой платформ 2 и 3, кинематически связанных с опорным основанием 1 посредством подвижных стержневых опор, образующих замкнутую кинематическую цепь с цилиндрическими шарнирами O1, A, E, N, G, Q, O2, O3, состоящую из двух шарнирных пятизвенников O2AENO2 и O2NGQO3 с общей стороной O2N = O4M и осью NM, к которых оси вращательных кинематических пар в шарнирах Ol, A, E, N, G, Q, O2, O3 установлены параллельно плоскости опорного основания 1 и снабжены тремя приводными вращательными кинематическими парами О1, O2, O3 для образования пространственного манипулятора с тремя степенями свободы. Общая сторона замкнутых контуров кинематической цепи выполнена в виде двухшарнирного соединительного рычага длиной O2N = O4M.
На фиг. 2 представлен вариант выполнения платформенного механизма относительного манипулирования (тип А-2), в котором замкнутая кинематическая цепь содержит два замкнутых контура O1ENO2 и O2NGO3 с общей стороной O2N = O4M с осью NM, в которых шарнирно-сочленные платформы 2 и 3 кинематически связаны с опорным основанием 1 через два приводных шарнирно-поворотных гидроцилиндра 4 и 5 и приводную вращательную кинематическую пару O2 с установкой всех осей цилиндрических шарниров O1, E, N, O2, G и O3 параллельно плоскости опорного основания 1 для образования пространственного манипулятора с тремя степенями свободы, а двухшарнирный рычаг 6 выполнен с устройством регулирования его длины O2N = O4M, которое выполнено в виде самотормозящейся винтовой кинематической пары 7.
На фиг. 3 представлен вариант выполнения платформенного механизма относительного манипулирования (тип А-3), в котором замкнутая кинематическая цепь составлена из шарнирного параллелограмма O1ENO2 с приводной вращательной кинематической парой О1, имеющего общую сторону O2N=O4M и ось NM с шарнирным пятизвенником O2NGQO3 с приводной вращательной кинематической парой O3, в которой оси всех цилиндрических шарниров O1, E, N, O2, G, Q, O3 установлены параллельно плоскости опорного основания 1 для образования пространственного манипулятора с двумя степенями свободы.
На фиг. 4 представлен вариант выполнения платформенного механизма относительного манипулирования (тип А-4), в котором замкнутая кинематическая цепь составлена из шарнирного параллелограмма O1ENO2 с приводной вращательной кинематической парой О1, имеющего общую сторону O2N=O4M и ось NM с шарнирным пятизвенником O2NGQO3 с приводным шарнирно-поворотным гидроцилиндром 8. Оси всех цилиндрических шарниров O1, Е, N, O2, G и O3 установлены параллельно плоскости опорного основания 1 для образования пространственного манипулятора с двумя степенями свободы.
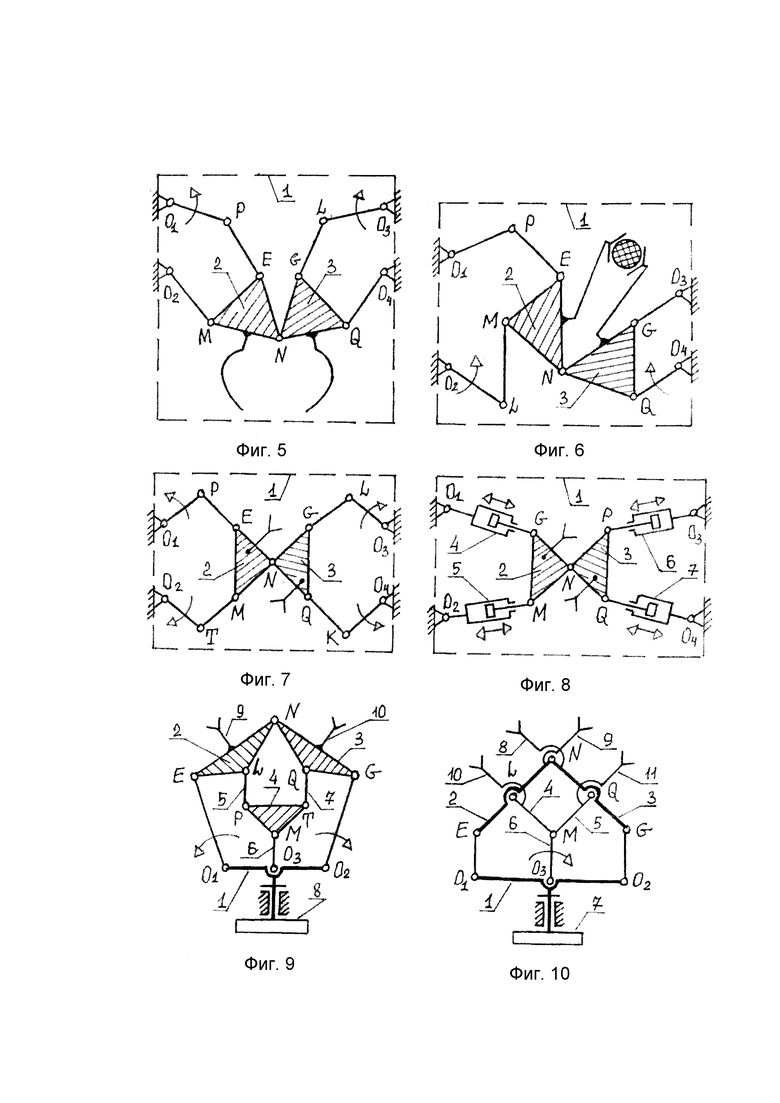
На фиг. 5 представлен вариант выполнения платформенного механизма относительного манипулирования (тип В-1), в котором каждая из двух шарнирно-сочлененных платформ 2 и 3 кинематически связана с опорным основанием 1 посредством двух подвижных стержневых опор, одна из которых выполнена в виде двух подвижно соединенных между собой двухшарнирных соединительных рычагов О1Р и РЕ с приводной вращательной кинематической парой О1, другая опора выполнена в виде двухшарнирного звена O2M, а оси всех цилиндрических шарниров O1, P, E, G, L, O3, O2, M, N, Q и O4 установлены перпендикулярно плоскости опорного основания для образования грейфера с двумя степенями свободы.
На фиг. 6 представлен вариант выполнения платформенного механизма относительного манипулирования (тип В-2), в котором каждая из двух шарнирно-сочленных платформ 2 и 3 кинематически связана с опорным основанием 1 посредством двух подвижных стержневых опор (соответственно с четырехшарнирным контуром O3GQO4 и с шестишарнирным контуром O1PEMLO2) с двумя приводными вращательными парами O2 и O4, в которых оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания 1 для образования плавающего зажимного устройства с двумя степенями свободы.
На фиг. 7 представлен вариант выполнения платформенного механизма относительного манипулирования (тип В-3). в котором каждая из двух шарнирно-сочленных платформ 2 и 3 кинематически связана с опорным основанием 1 посредством двух подвижных стержневых опор О1РЕ, O2TM и O3LG, O4KQ с приводными вращательными кинематическими парами О1 и O3, в которых оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания 1 для образования платформенного манипулятора с 4 степенями свободы. Каждая из упомянутых опор выполнена в двух подвижно соединенных между собой двухшарнирных соединительных рычагов с приводными вращательными парами O1, O2, O3, O4.
На фиг. 8 представлен вариант выполнения платформенного механизма относительного манипулирования (тип В-4), в котором каждая из двух шарнирно-сочленных платформ 2 и 3 кинематически связана с опорным основанием 1 посредством двух подвижных стержневых опор O1G, O2M и O3P, O4Q, каждая из которых содержит приводной шарнирно-подвижный гидроцилиндр 4, а оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания 1 для образования платформенного манипулятора с поступательным приводом, имеющего четыре степени свободы.
На фиг. 9 представлен вариант выполнения платформенного механизма относительного манипулирования (тип С-1), в котором шарнирно-сочленные платформы 2 и 3 связаны с опорным основанием 1 через трехшарнирное звено 4 с присоединенными к его вершинам двухшарнирными звеньями 5, 6 и 7, которые установлены внутри пятизвенника O1ENGO2 и снабжены двумя приводными вращательными парами, а оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания 1 для образования двурукого робота с двумя степенями свободы, установленного на поворотную платформу 8 и содержащего два рабочих органа 9 и 10, раздельно сблокированных с каждой из платформ 2 и 3.
На фиг. 10 представлен вариант выполнения платформенного механизма относительного манипулятора (тип С-2), в котором шарнирно-сочлененные платформы 2 и 3 кинематически связаны с опорным основанием 1 через три соединительных двухшарнирных звена 4, 5 и 6, которые соединены между собой через двойной шарнир М и снабжены приводной вращательной кинематической парой O3, а оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания 1 для образования четырехрукого робота с одной степенью свободы, установленного на поворотную платформу 7 и содержащего четыре рабочих органа, раздельно сблокированных с каждой из шарнирно-сочленных платформ 2 и 3 и с двумя 4 и 5 соединительными двухшарнирными звеньями.
Работа представленного платформенного механизма относительного манипулирования заключается в следующем.
Заданное движение приводных кинематических пар (в направлении движения ведущих звеньев, которое указано стрелками на всех фиг. 1 - фиг. 10) посредством подвижных стержневых опор преобразуется в требуемое перемещение каждой из шарнирно-сочлененных платформ 2 и 3 в прямоугольной декартовой системе координат х, у, z (вокруг или вдоль этих координат), что приводит к образованию рабочих зон каждой из сочлененных платформ 2 и 3, которые в данном платформенном механизме суммируются и образуют расширенную рабочую область относительного манипулирования между собой установленных на сочлененных платформах 2 и 3 разных объектов (например, в виде детали и обрабатывающего инструмента или в виде двух собираемых между собой на конвейере разных деталей и узлов).
Достигаемый в предлагаемом платформенном механизме относительного манипулирования положительный эффект заключается в следующем:
1. Упрощение конструкции платформенного механизма относительного манипулирования за счет применения всех простых цилиндрических шарниров с параллельными между собой осями вращения.
2. Расширение функциональных возможностей за счет согласованного манипулирования между собой сразу двумя разными объектами.
3. Упрощение системы управления указанным манипулированием этих объектов за счет раздельной управляемой кинематики двух сочленных платформ с разными установленными на них рабочими органами.
4. Расширение рабочего пространства относительного манипулирования за счет суммирования отдельных рабочих зон каждой из сочленных платформ, которые включат как раздельное вращение вокруг параллельных осей, так и плоскопараллельное криволинейное поступательное движение объектов с сохранением их заданной (горизонтальной, вертикальной, угловой) ориентации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
Изобретение относится к платформенным рычажным механизмам параллельной структуры и может быть использовано в робототехнике, автоматических линиях, обрабатывающих центрах и технологических установках для смещения между собой двух подвижных объектов и разных рабочих органов. Платформенный механизм относительного манипулирования содержит опорное основание и приводное исполнительное устройство, выполненное в виде двух шарнирно-сочлененных между собой платформ, кинематически связанных с опорным основанием посредством подвижных стержневых опор, составляющих замкнутую кинематическую цепь, звенья которой образуют вращательные кинематические пары для сборки цилиндрических шарниров с параллельными между собой осями вращения. Технический результат заключается в упрощении конструкции за счет применения только простых цилиндрических шарниров с параллельными осями вращения, упрощении управления путем раздельной кинематики привода, а также расширении функциональности и рабочего пространства механизма за счет суммирования рабочих зон. 9 з.п. ф-лы, 10 ил.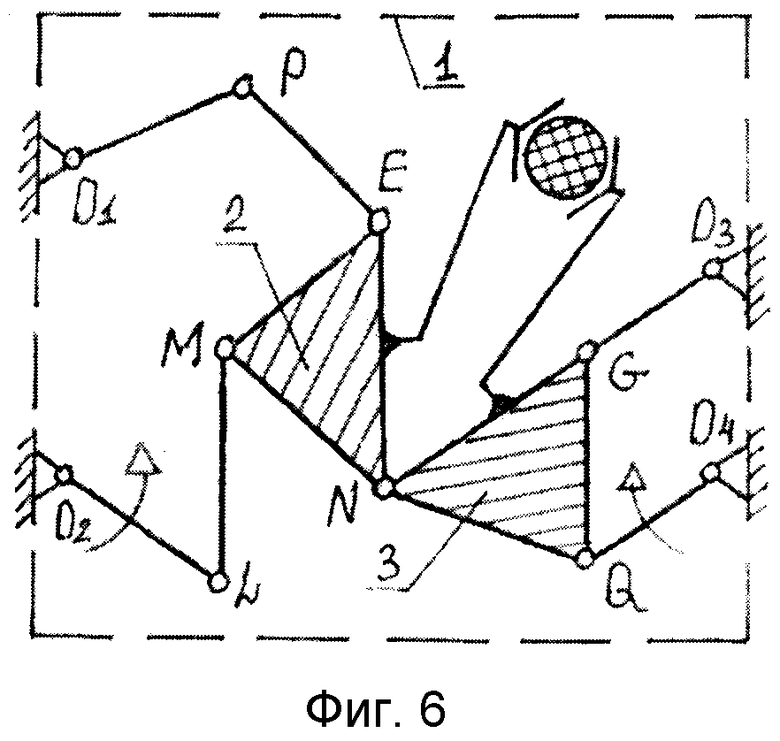
1. Платформенный механизм относительного манипулирования, содержащий опорное основание и приводное исполнительное устройство, отличающийся тем, что приводное исполнительное устройство выполнено в виде двух шарнирно-сочлененных между собой платформ, кинематически связанных с опорным основанием посредством подвижных стержневых опор, составляющих замкнутую кинематическую цепь, звенья которой образуют вращательные кинематические пары для сборки цилиндрических шарниров с параллельными между собой осями вращения.
2. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из двух шарнирных пятизвенников с одной общей стороной, в которых оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания и снабжены тремя приводными вращательными парами для образования пространственного манипулятора с тремя степенями свободы.
3. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что замкнутая кинематическая цепь содержит два замкнутых контура с одной общей стороной, в которых шарнирно-сочлененные платформы кинематически связаны с опорным основанием через два приводных шарнирно-поворотных гидроцилиндра и приводную вращательную кинематическую пару, оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания для образования пространственного манипулятора с тремя степенями свободы, а общая сторона замкнутых контуров кинематической цепи выполнена в виде двухшарнирного соединительного рычага, снабженного устройством регулирования расстояния между его шарнирами, которое выполнено в виде самотормозящейся винтовой кинематической пары.
4. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из шарнирного параллелограмма с приводной вращательной кинематической парой, имеющего общую сторону с шарнирным пятизвенником с приводной вращательной кинематической парой, в котором оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания для образования пространственного манипулятора с двумя степенями свободы.
5. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлен из шарнирного параллелограмма с приводной вращательной кинематической парой, имеющего общую сторону с шарнирным пятизвенником с приводным шарнирно-поворотным гидроцилиндром, в котором оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания для образования пространственного манипулятора с двумя степенями свободы.
6. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что каждая из двух шарнирно-сочлененных платформ кинематически связана с опорным основанием посредством двух подвижных стержневых опор, одна из упомянутых опор выполнена в виде двухшарнирного звена с приводной вращательной кинематической парой, а другая из упомянутых опор выполнена в виде двух подвижно соединенных между собой двухшарнирных соединительных рычагов, в которых оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания для образования грейфера с двумя степенями свободы.
7. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что каждая из двух шарнирно-сочлененных платформ кинематически связана с опорным основанием посредством двух подвижных стержневых опор, а каждая из упомянутых опор выполнена в виде двух подвижно соединенных между собой двухшарнирных соединительных рычагов с приводными вращательными кинематическими парами, в которых оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания для образования платформенного манипулятора с четырьмя степенями свободы.
8. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что каждая из двух шарнирно-сочлененных платформ кинематически связана с опорным основанием посредством двух подвижных стержневых опор, каждая из которых содержит приводной шарнирно-поворотный гидроцилиндр, а оси всех цилиндрических шарниров установлены перпендикулярно плоскости опорного основания для образования платформенного манипулятора с поступательным приводом, имеющего четыре степени свободы.
9. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что шарнирно-соединенные платформы кинематически связаны с опорным основанием через трехшарнирное звено с присоединенными к его вершинам двухшарнирными звеньями, которые установлены внутри шарнирного пятизвенника и снабжены двумя приводными вращательными кинематическими парами, а оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания для образования двурукого робота с двумя степенями свободы, установленного на поворотную платформу и содержащего два рабочих органа, раздельно сблокированных с каждой из шарнирно-сочленных платформ.
10. Платформенный механизм относительного манипулирования по п. 1, отличающийся тем, что шарнирно-соединенные платформы кинематически связаны с опорным основанием 1 через три соединительных двухшарнирных звена, которые соединены между собой через двойной шарнир и снабжены приводной вращательной кинематической парой, а оси всех цилиндрических шарниров установлены параллельно плоскости опорного основания для образования четырехрукого робота с одной степенью свободы, установленного на поворотную платформу и содержащего четыре рабочих органа, раздельно сблокированных с каждой из шарнирно-сочлененных платформ и с двумя из упомянутых трех соединительных двухшарнирных звеньев.
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ | 2019 |
|
RU2737249C1 |
| RU 154785 U1, 10.09.2015 | |||
| CN 205151269 U, 13.04.2016 | |||
| US 6729202 B2, 04.05.2004 | |||
| 0 |
|
SU202579A1 | |

