Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) для непрерывной селекции, сопровождения интенсивно маневрирующей воздушной цели (МВЦ), в том числе информационного обеспечения процесса наведения летательного аппарата (ЛА).
Повышение скорости и маневренности современных ЛА предъявляет к РЛС самолетов-истребителей, ракет и БЛА высокие требования по точности, быстродействию и устойчивости сопровождения целей по направлению (по углу и угловой скорости). Существующие системы сопровождения используют как инерционный механический следящий привод антенны, так и фазированные антенные решетки (ФАР). Безинерционная ФАР, наряду с высокими показателями, сложна в изготовлении и соответственно имеет высокую стоимость. Исходя из этого до сих пор актуальным остается построение более дешевой следящей системы на базе инерционного привода антенны, удовлетворяющей современным требованиям для ряда бортовых РЛС, работающим по маневрирующим высокоскоростным, в том числе гиперзвуковым, целям.
Известен способ [1], в законе управления которого учитывают угловую скорость линии визирования, ее первую и вторую производные, а также инерционный привод антенны, при этом в сигнале управления дополнительно учитываются скорость линии визирования, ее первая и вторая производные. Для формирования сигнала управления используется математический аппарат статистической теории оптимального управления на основе минимизации обобщенного функционала качества управления, при котором управление находится по выражению

где:
Δϕ=ϕц - φAB; Δω=ωц - ωАВ;
ϕц и ωц - пеленг цели и угловая скорость линии визирования цели;
φAB и ωAB - угол поворота и угловая скорость поворота оси антенны;
 - первая производная угловой скорости линии визирования;
- первая производная угловой скорости линии визирования;
 - вторая производная угловой скорости линии визирования;
- вторая производная угловой скорости линии визирования;
«∧» - символ оценок параметров;
K - штраф за величину сигнала управления и, обусловленный энергетическими ресурсами привода антенны;
b - коэффициент усиления привода антенны в плоскости управления;
Р21 и Р22 - элементы матрицы весовых коэффициентов текущего вектора состояния, принятые постоянными;
Тпр - постоянная времени привода антенны.
Способ обеспечивает устойчивое сопровождение маневрирующей по углу гиперзвуковой цели в широком диапазоне угловых скоростей, за счет учета не только пеленга цели, углового положения линии визирования и их производных, но производных первого и второго порядка от угловой скорости линии визирования. Это приводит к дополнительным затратам на информационное обеспечение, соответственно увеличение и вычислительных затрат, и стоимости.
Известен двухдиапазонный следящий угломер, приведенный в [2]. В данном устройстве по наблюдениям направления на цель ε, направления оси ЛА ψ и угла между направлением оси антенны и направлением оси ЛА ϕ находят текущий вектор состояния цели  , текущий вектор состояния оси ЛА
, текущий вектор состояния оси ЛА  , где
, где  - обозначения угловой скорости и углового ускорения в векторах состояния цели, оси ЛА и оси антенны, соответственно. Сигнал управления приводом антенны u учитывает ошибки сопровождения по углу
- обозначения угловой скорости и углового ускорения в векторах состояния цели, оси ЛА и оси антенны, соответственно. Сигнал управления приводом антенны u учитывает ошибки сопровождения по углу  и угловой скорости
и угловой скорости  , дополнительно учитывает ошибки по угловому ускорению
, дополнительно учитывает ошибки по угловому ускорению  , угловой скорости линии визирования
, угловой скорости линии визирования  и угловому ускорению линии визирования цели
и угловому ускорению линии визирования цели  . Сигнал управления приводом антенны находится по выражению:
. Сигнал управления приводом антенны находится по выражению:

где  - априорно известные постоянные коэффициенты усиления, записанные в запоминающем устройстве.
- априорно известные постоянные коэффициенты усиления, записанные в запоминающем устройстве.
Устройство обеспечивает устойчивое сопровождение современных радиоконтрастных целей по углу. Учет ошибки по угловому ускорению линии визирования, предшествующей угловой скорости и угловому ускорению линии визирования, приводит к дополнительным затратам на информационное обеспечение, соответственно увеличение и вычислительных затрат, и стоимости.
Известен способ управления инерционным приводом антенны в угломере, приведенный в [3, с. 284-285], используемый в качестве прототипа. В данном алгоритме сигнал управления и учитывает ошибки сопровождения по углу и угловой скорости в соответствии с формулой:
 где:
где:
 - постоянный коэффициент усиления, определяющий вес ошибки управления по углу Δϕ;
- постоянный коэффициент усиления, определяющий вес ошибки управления по углу Δϕ;
 - постоянный коэффициент усиления, определяющий вес сигнала ошибки сопровождения по угловой скорости Δω;
- постоянный коэффициент усиления, определяющий вес сигнала ошибки сопровождения по угловой скорости Δω;
q21 и q22 - элементы матрицы штрафов в момент времени tk окончания управления.
Недостатком способа-прототипа является относительно высокая ошибка управления приводом антенны по углу и угловой скорости при сопровождении МВЦ, связанная с не оптимальным выбором штрафов q21 и q22 за ошибки управления по углу и угловой скорости методом перебора (методом проб и ошибок).
Целью предлагаемого изобретения является снижение ошибок управления приводом антенны РЛС ЛА по углу и угловой скорости при сопровождении МВЦ.
Заявленная цель достигается за счет нахождения расчетом оптимальных весов ошибок управления приводом антенны по углу  и угловой скорости
и угловой скорости  , при этом исключается трудоемкий, не оптимальный по результату поиск весов ошибок управления методом перебора (методом проб и ошибок).
, при этом исключается трудоемкий, не оптимальный по результату поиск весов ошибок управления методом перебора (методом проб и ошибок).
Для пояснения основных математических соотношений, которые используются в заявляемом способе, определим закон управления приводом антенны в вертикальной плоскости при сопровождении МВЦ. Процесс управления описывается системой дифференциальных уравнений:



где:
ху - n-мерный вектор управляемых параметров привода антенны;
хm - m-мерный вектор оцениваемых параметров отслеживаемой цели;
ƒy и ƒm - динамические матрицы состояния процессов (1) и (2);
u - r-мерный вектор сигналов управления (r меньше или равен n);
ξу и ξm - n-мерные векторы центрированных гауссовских возмущений процессов xу и хm;
 - обобщенный вектор состояния;
- обобщенный вектор состояния;
z - m-мерный вектор наблюдений (m меньше или равен n);
H - матрица связей обобщенного вектора х с z;
ξu - m-мерные векторы центрированных гауссовских шумов измерений.
Движение ЛА, на котором размещен угломер РЛС, характеризуется относительно наблюдаемой МВЦ в плоскости XOY положением линии визирования (ε), бортовым углом пеленга цели (β); углом поворота антенны относительно продольной оси ЛА (φAB); угловым положением оси ЛА (ϑ) относительно оси X, совпадающей с горизонтальной проекцией вектора скорости ЛА в вертикальной (горизонтальной) плоскости (фиг. 1). Точки О и Оц есть расположения ЛА и МВЦ соответственно в прямоугольной системе координат XOY, ОХоy - продольная ось ЛА, ОХа - равносигнальное направление, ОХ - горизонтальная ось, параллельная горизонтальной проекции вектора скорости ЛА, OY - предполагается вертикальной при рассмотрении движения ЛА и управления приводом антенны в вертикальной плоскости, при рассмотрении движения ЛА и управления приводом антенны в горизонтальной плоскости - горизонтальная.
Обобщенный вектор состояния х можно представить в виде:







где:
ω - угловая скорость линии визирования МВЦ;
Д и  - дальность и скорость сближения с МВЦ;
- дальность и скорость сближения с МВЦ;
аЦ и аЛА - нормальные ускорения МВЦ и ЛА;
γЦ - коэффициент, учитывающий маневренные свойства цели (величина, обратная постоянной времени маневра цели);
ωϑ - угловая скорость положения оси ЛА (ϑ) в вертикальной (горизонтальной) плоскости;
γϑ - коэффициент, характеризующий ширину спектра угловых колебаний оси ЛА;
Тпр - постоянная времени привода антенны;
b - коэффициент усиления привода антенны;
u - сигнал управления приводом антенны;
ξЦ, ξϑ, ξАВ - центрированные белые шумы с известными односторонними спектральными плотностями.
Ошибка управления в вертикальной плоскости определяется углом Δφ между равносигнальным направлением антенны и направлением на цель. Тогда для точного слежения за МВЦ необходимо обеспечить такое управление приводом антенны РЛС, чтобы ошибки сопровождения цели по углу Δφ=ε-ϑ-φАВ и угловой скорости Δω=ω-ωϑ-ωАВ свести к нулю.
Уравнение (1) с учетом (9) и (10) в матричном виде запишется:

где:


By - матрица эффективности управления.
С учетом вектора требуемых параметров  выражения (4), (5), (7) и (8) для формирования сигналов управления будем использовать линейно-квадратичный функционал качества [2]:
выражения (4), (5), (7) и (8) для формирования сигналов управления будем использовать линейно-квадратичный функционал качества [2]:

где:
α и γ - весовые коэффициенты ошибок управления;
K - штраф за величину сигналов управления;
Т - время управления, равное Тпр - постоянной времени привода антенны; введение обусловлено приведением к единой размерности.
В соответствии с теорией оптимального управления [3, с. 234-251] получено, что минимизация линейно-квадратичного функционала качества (12) достигается при сигнале управления вида:


Выражение (13) - это закон управления, а выражение (14) - дифференциальное уравнение коэффициентов усиления сигналов управления. Требуемое управление приводом антенны РЛС в целях сопровождения МВЦ без срыва должно быть:

Здесь для вычисления элементов матрицы коэффициентов усиления D необходимо определить элементы симметричной матрицы L - матрицы штрафов за точность управления на всем промежутке управления. С учетом общей записи интегральной составляющей критерия и рассматриваемого вектора управляемых параметров запишем следующее:

Разложение подинтегральной суммы первого интеграла (12) дает:

Исходя из выражений (16) и (17) полная матрица штрафов за точность управления примет вид:

С учетом (18) выражение (14) преобразуется к виду:

Определим элементы матрицы d12 и d22 в установившемся режиме, то есть после окончания переходных процессов, вызванных граничными условиями. Представим элементы матрицы D в виде:


Отсюда элементы матрицы  будут равны:
будут равны:


Приравняв  соответствующим элементам матрицы (19) получим систему уравнений:
соответствующим элементам матрицы (19) получим систему уравнений:



Для решения системы уравнений были проведены следующие преобразования. Из (20) выражен с11 и подставлен в (21), которое аналитически решено как квадратичное уравнение и найдены корни уравнения, решением является отрицательный корень, зависящий от с22. Выражение (22) также решено как квадратичное уравнение, решением является отрицательный корень. Значения корней выражений (21) и (22) примут вид:


Совместным решением системы уравнений (23) и (24) находят с12 и с22.
Таким образом, поставляя с12 и с22 в (19), находят матрицу и далее, с учетом (13) и (14), находят закон управления приводом антенны следящего угломера РЛС:

Выражение (25) является оптимальным законом управления приводом антенны РЛС для сопровождения МВЦ, заданной дифференциальными уравнениями.
Предлагаемый способ работы РЛС на борту ЛА включает:
одновременное измерение углового положения линии визирования цели ε в вертикальной (горизонтальной) плоскости, скорости ее изменения ω, углового положения оси ЛА ϑ в вертикальной (горизонтальной) плоскости, скорости его изменения ωϑ в вертикальной (горизонтальной) плоскости, углового положения оси антенны относительно продольной оси ЛА (в дальнейшем называемом углом поворота) φАВ в вертикальной (горизонтальной) плоскости и скорости его изменения в вертикальной (горизонтальной) плоскости ωAB, формирование сигналов ошибок сопровождения цели по углу Δφ и угловой скорости Δω, значение ошибки сопровождения цели по углу Δφ получают из выражения:
значение ошибки сопровождения цели по угловой скорости получают из выражения

сигнал управления приводом антенны и получают весовой суммой ошибок сопровождения цели по углу Δφ и угловой скорости Δω с постоянными весами ωΔφ и ωΔω соответственно, зависящими от свойств привода антенны:

отличающийся тем, что в качестве wΔφ и wΔω, используются значения, определяемые расчетом в последовательности: находят значения коэффициентов с12 и с22 из системы уравнений  и
и  подставляют их в выражения для расчета весов wΔφ и wΔω по выражениям:
подставляют их в выражения для расчета весов wΔφ и wΔω по выражениям:

 >
>
где:
b - коэффициент усиления привода антенны в вертикальной (горизонтальной) плоскости;
α и γ - весовые коэффициенты ошибок управления в вертикальной (горизонтальной) плоскости;
K - штраф за величину сигнала управления в вертикальной (горизонтальной) плоскости;
Тпр - постоянная времени привода антенны.
Оптимальный закон управления отличается от закона управления в прототипе единственными, однозначно связанными с заданными параметрами привода  весовыми коэффициентами ошибок управления
весовыми коэффициентами ошибок управления  , рассчитанными через нахождение коэффициентов
, рассчитанными через нахождение коэффициентов  матрицы усиления сигналов управления с учетом полной матрицы штрафов за точность в текущий момент времени управления.
матрицы усиления сигналов управления с учетом полной матрицы штрафов за точность в текущий момент времени управления.
Сущность предлагаемого способа управления приводом антенны угломера РЛС ЛА при сопровождении МВЦ поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлена геометрия слежения за МВЦ.
На фиг. 2 представлены результаты моделирования отработки угла поворота антенны предлагаемым способом.
На фиг. 3 представлены результаты моделирования отработки угла поворота антенны способом-прототипом.
На фиг. 4 представлены результаты моделирования отработки угловой скорости поворота антенны предлагаемым способом.
На фиг. 5 представлены результаты моделирования отработки угловой скорости поворота антенны способом-прототипом.
На фиг. 6 представлена ошибка по углу поворота антенны предлагаемым способом и способом-прототипом.
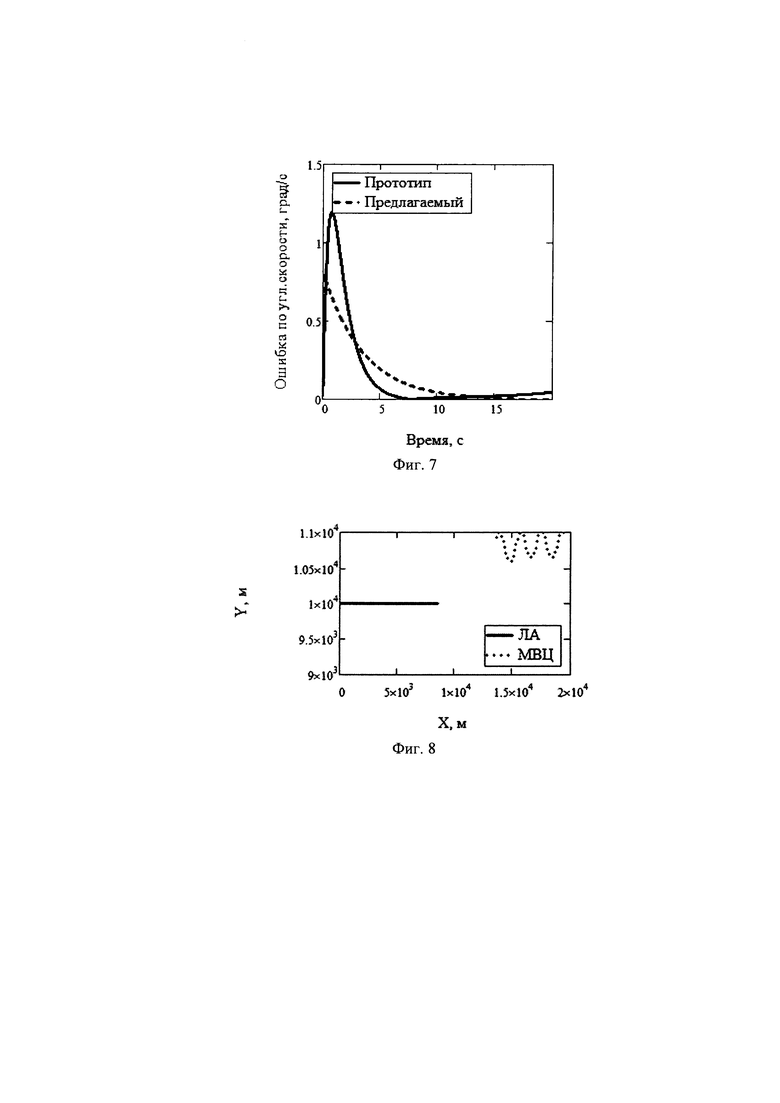
На фиг. 7 представлена ошибка по угловой скорости поворота антенны предлагаемым способом и способом-прототипом.
На фиг. 8 представлены траектории движения ЛА и МВЦ, выполняющей маневр типа «змейка».
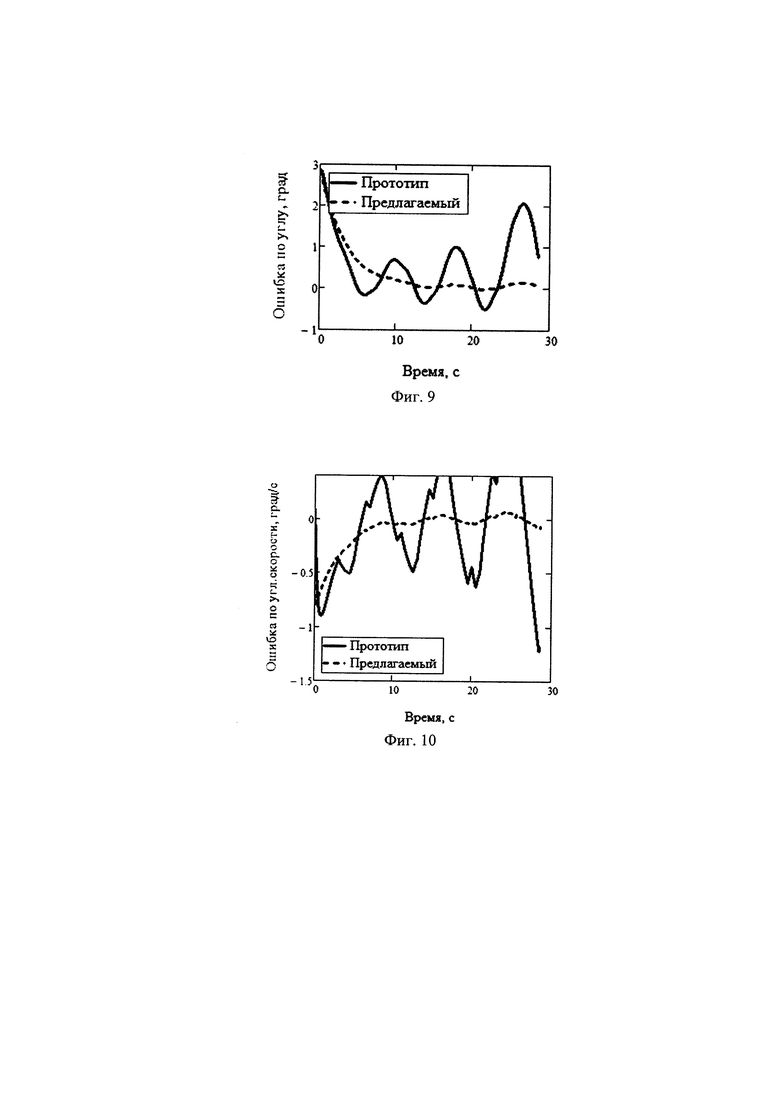
На фиг. 9 представлена ошибка по углу поворота антенны предлагаемым способом и способом-прототипом при сопровождении МВЦ, выполняющей маневр типа «змейка».
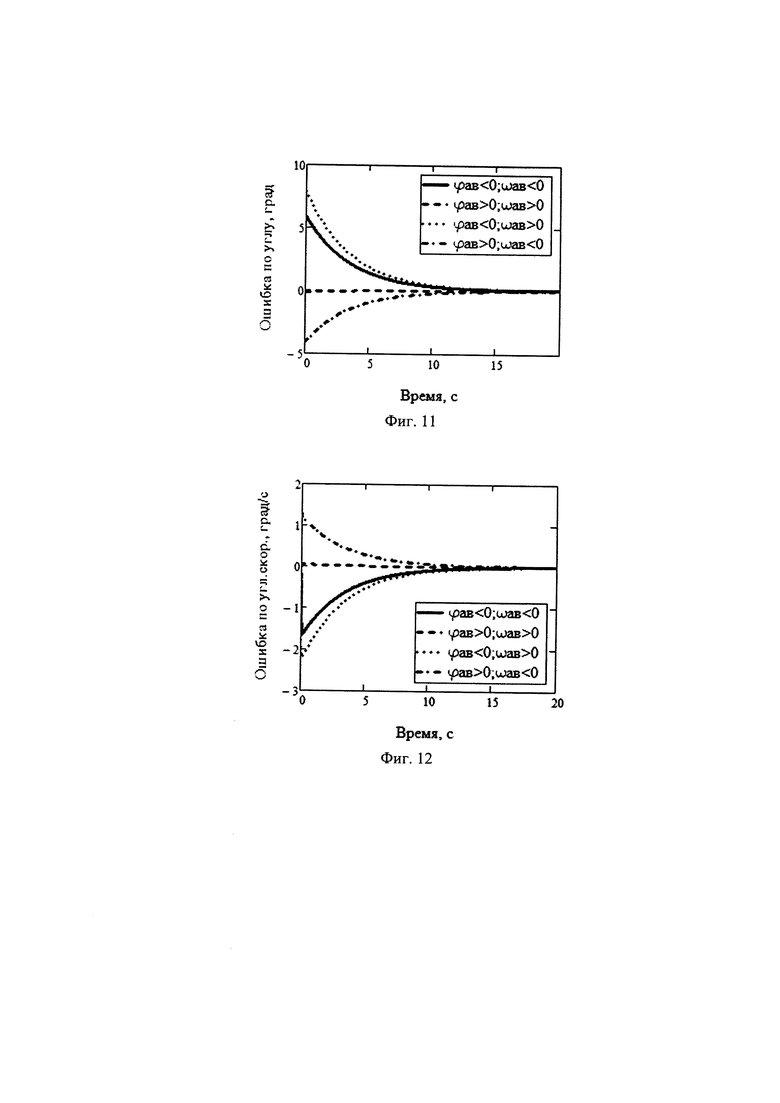
На фиг. 10 представлена ошибка по угловой скорости поворота антенны предлагаемым способом и способом-прототипом при сопровождении МВЦ, выполняющей маневр типа «змейка».
На фиг. 11 представлены ошибки по углу поворота антенны предлагаемым способом при различных начальных условиях.
На фиг. 12 представлены ошибки по угловой скорости поворота антенны предлагаемым способом при различных начальных условиях:
1) Δϕ(0)<0, Δω(0)<0;
2) Δϕ(0)>0, Δω(0)>0;
3) Δϕ(0)<0, Δω(0)>0;
4) Δϕ(0)>0, Δω(0)<0.
Предлагаемый способ формирования сигналов управления приводом антенны РЛС при сопровождении МВЦ в вертикальной (горизонтальной) плоскости реализуется следующим образом.
Одновременно в вертикальной (горизонтальной) плоскости измеряют значения угла линии визирования цели ε и скорость ее изменения ω, угловое положение оси ЛА ϑ в вертикальной (горизонтальной) плоскости, скорости его изменения ωϑ в вертикальной (горизонтальной) плоскости, угол поворота антенны РЛС φАВ и скорость ее изменения ωAB.
Определяют требуемое значение угла поворота антенны РЛС Δφ, соответствующее ошибке сопровождения цели по углу по выражению:
Δφ=ε-ϑ-φАВ,
значение ошибки сопровождения цели по угловой скорости получают из выражения:
Δω=ω-ωϑ-ωAB.
Из системы уравнений


находят значения коэффициентов с12 и с22.
Вычисляют весовые коэффициенты wΔφв и wΔωв по формулам:

Формируют сигнал управления приводом антенны РЛС в вертикальной (горизонтальной) плоскости по выражению:

Для определения эффективности предлагаемого способа было проведено математическое моделирование процесса управления приводом антенны РЛС при сопровождении МВЦ в вертикальной плоскости, а также способа-прототипа, в котором сигнал управления определен по выражению

где:


При этом рассматривалась типовые траектории движения ЛА и МВЦ на встречных курсах со следующими параметрами моделирования: скорость ЛА 300 м/с и МВЦ 250 м/с; начальные координаты ЛА (0;104) и МВЦ (2×104;1,1×104); параметры привода антенны для обоих случаев: коэффициент усиления привода антенны b=1 и постоянная времени привода антенны Тпр=0,5 с. Расчеты проводились при одинаковых весовых коэффициентах ошибок управления. На фиг. 2, 3, 4, 5 представлены зависимости изменения углов поворота для предлагаемого способа и способа прототипа, угловых скоростей поворота для предлагаемого способа и способа-прототипа с учетом требуемых значений по углу и угловой скорости.
В качестве показателей эффективности рассматривался модуль абсолютных ошибок сопровождения по углу и угловой скорости. Результаты моделирования в виде временных зависимостей показателей эффективности представлены на фиг. 6 и 7. Их анализ показывает, что при использовании предлагаемого способа ошибки управления снижаются. Так, в рассмотренных условиях ошибка сопровождения по углу при t больше 10 с снижается до 80%, а по угловой скорости до 50% по сравнению с прототипом. В интересах определения типа сопровождаемых целей проведено моделирование процесса сопровождения МВЦ, выполняющей маневр типа «змейка», характерная для гиперзвуковых ЛА. Траектории Л А и МВЦ показаны на фиг. 8. На фиг. 9 и 10 представлены ошибки сопровождения по углу и угловой скорости при слежении за МВЦ, выполняющей маневр типа «змейка» для предлагаемого способа и способа-прототипа. Анализ данных зависимостей показывает, что предлагаемый способ возможно использовать для управления приводом антенны РЛС в интересах сопровождения высокоскоростных, в том числе гиперзвуковых, целей.
На фиг. 11 и 12 показаны ошибки сопровождения по углу и угловой скорости при различных сочетаниях начальных условий:
1) Δϕ(0)<0, Δω(0)<0;
2) Δϕ(0)>0, Δω(0)>0; Δϕ(0)<0, Δω(0)>0; Δϕ(0)>0, Δω(0)<0.
Результаты показывают способность предлагаемого сигнала управления отрабатывать начальные ошибки сопровождения любого знака и в любом сочетании.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ аналитического расчета оптимальных весов сигналов рассогласования положения оси антенны по углу и угловой скорости для вычисления сигнала управления механическим приводом антенны, позволяющий повысить как точность, так и устойчивость слежения за маневрирующей целью.
Предлагаемое техническое решение применимо в существующих бортовых радиолокационных станциях в интересах сопровождения высокоскоростных, в том числе гиперзвуковых, целей в широком диапазоне угловых скоростей.
Источники информации:
1. Патент России 2571363 от 20.12.2015, кл. H01Q 25/00, G01S 13/66. Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов.
2. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь. 1996. 396 с.
3. Бухалев В.А. Основы автоматики и теории управления. - М.: Изд. ВВИА им. Н.Е. Жуковского. 2006. 406 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571363C2 |
| Способ нелинейного управления инерционным приводом антенны, обеспечивающий высокую устойчивость сопровождения интенсивно маневрирующих объектов | 2017 |
|
RU2661346C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| СПОСОБ УСТРАНЕНИЯ НЕСООТВЕТСТВИЯ ДИНАМИЧНОСТИ ПОДСИСТЕМ В СОСТАВЕ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ И СИСТЕМА ОБЕСПЕЧЕНИЯ БЕССРЫВНОГО СОПРОВОЖДЕНИЯ ИНТЕНСИВНО МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2015 |
|
RU2617870C2 |
| Способ перехвата интенсивно маневрирующих высокоскоростных воздушно-космических объектов | 2017 |
|
RU2666069C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ПОВЫШЕННОЙ АДАПТАЦИЕЙ К МАНЕВРУ НОСИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2598001C2 |
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |


Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) для непрерывной селекции, сопровождения интенсивно маневрирующей воздушной цели (МВЦ), в том числе информационного обеспечения процесса наведения летательного аппарата (ЛА). Техническим результатом заявленного изобретения является снижение ошибок управления приводом антенны РЛС ЛА по углу и угловой скорости при сопровождении МВЦ. В заявленном способе выполняют определение оптимальных, однозначно связанных с заданными параметрами привода антенны  весовых коэффициентов
весовых коэффициентов  ошибок управления приводом антенны по углу
ошибок управления приводом антенны по углу  и угловой скорости
и угловой скорости  рассчитанными через нахождение коэффициентов матрицы усиления сигналов управления, с учетом полной матрицы штрафов за точность в текущий момент времени управления. Расчет исключает трудоемкий, не оптимальный по результату поиск весов ошибок управления методом перебора (методом проб и ошибок). 12 ил.
рассчитанными через нахождение коэффициентов матрицы усиления сигналов управления, с учетом полной матрицы штрафов за точность в текущий момент времени управления. Расчет исключает трудоемкий, не оптимальный по результату поиск весов ошибок управления методом перебора (методом проб и ошибок). 12 ил.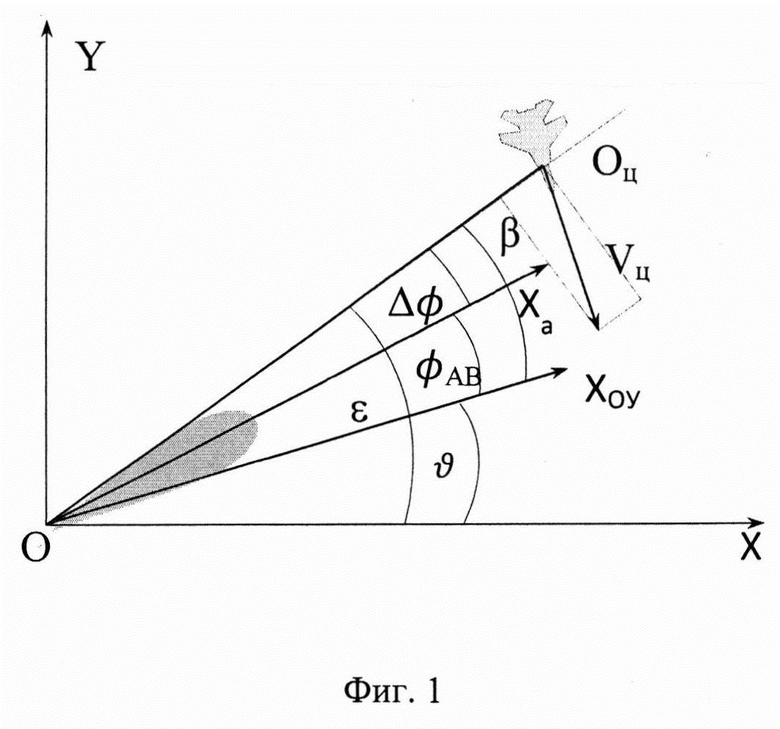
Способ управления положением оси антенны бортовой РЛС, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов, включающий одновременное измерение углового положения линии визирования цели ε в вертикальной (горизонтальной) плоскости, скорости ее изменения ω, углового положения оси летательного аппарата (ЛA) ϑ в вертикальной (горизонтальной) плоскости, скорости его изменения ωϑ в вертикальной (горизонтальной) плоскости относительно горизонтальной проекции вектора скорости ЛА, углового положения оси антенны относительно продольной оси ЛА (в дальнейшем называемом углом поворота) φАВ вертикальной (горизонтальной) плоскости и скорости его изменения ωАВ в вертикальной (горизонтальной) плоскости, формирование ошибок сопровождения цели по углу Δφ и угловой скорости Δω из выражений
Δφ=ε-ϑ-φАВ,
Δω=ω-ωϑ-ωАВ;
сигнал управления приводом антенны получают весовой суммой ошибок сопровождения цели по углу Δφ и угловой скорости цели Δω с весами по углу wΔφ и угловой скорости wΔω по выражению
u1=wΔφΔφ+wΔωΔω;
отличающийся тем, что в качестве весов по углу wΔφ и угловой скорости wΔω используются значения, определяемые расчетом в последовательности: находят из системы уравнений


значения коэффициентов с12 и с22; вычисляют веса ошибок по углу wΔφ и угловой скорости цели wΔω с учетом найденных коэффициентов c12 и c22 по выражениям


где b - коэффициент усиления привода антенны в вертикальной (горизонтальной) плоскости,
α и γ - весовые коэффициенты ошибок управления в вертикальной (горизонтальной) плоскости,
K - штраф за величину сигнала управления в вертикальной (горизонтальной) плоскости,
Тпр - постоянная времени привода антенны.

