Предлагаемый способ управления движением может быть использован в космической технике при сближении космического объекта (КО), например пилотируемого корабля (ПК), с другим космическим объектом (ДКО), например орбитальной станцией (ОС), для дальнейшего выполнения совместного полета.
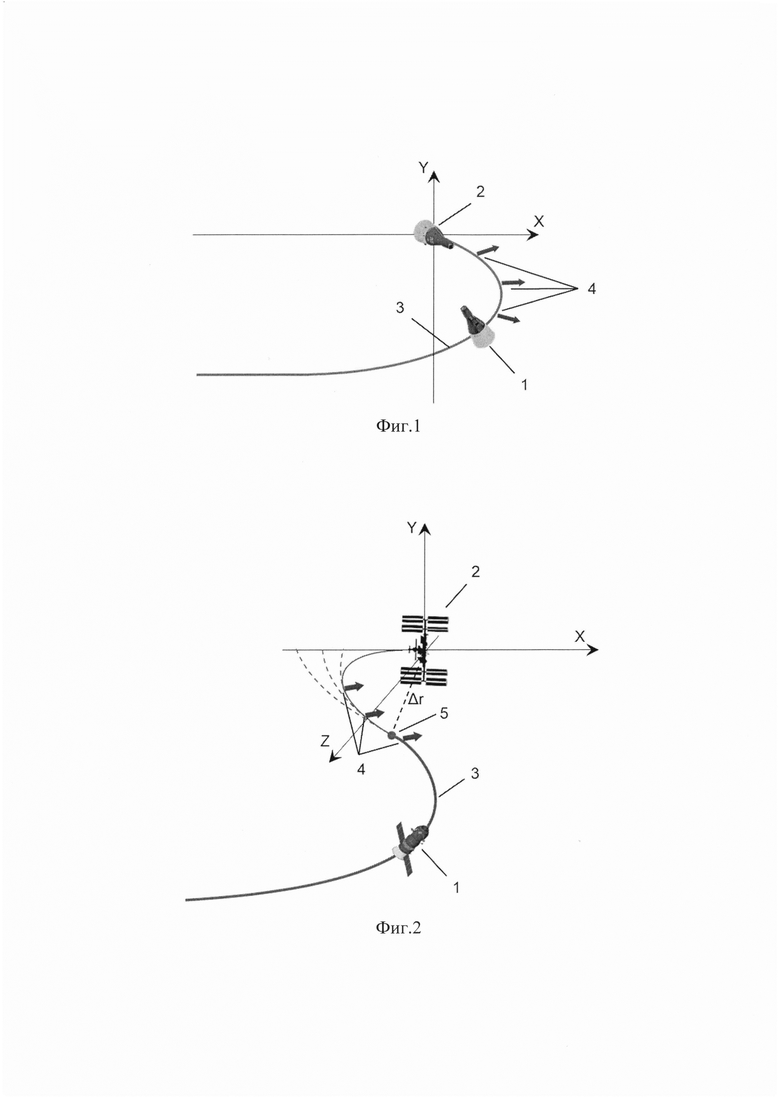
Известен способ управления американским ПК «Джемини-бА», исполнявшим роль КО, при его сближении с ПК «Джемини-7», исполнявшим роль ДКО [1. Gemini Midprogram Conference Including Experiment Results, SP-121. NASA. 1966. pp. 277-278], выбранный в качестве аналога, включающий выведение КО на орбиту, коэллиптическую орбите ДКО, которая обеспечивает равномерное движение КО относительно ДКО, а также стандартную геометрию траектории окончательного перехода КО на орбиту ДКО. Данный способ поясняется фиг. 1, на которой изображен переход КО 1 к ДКО 2 по траектории 3. Уменьшение относительной скорости осуществляется за счет импульсов скорости, прикладываемых к КО в точках 4 в направлении, противоположном направлению на ДКО и перпендикулярном линии визирования ДКО, после чего КО окончательно переходит на орбиту ДКО и совершает с ним совместный полет. При формировании траектории сближения со стандартной геометрией условия относительного движения на заключительном участке сближения также являются типовыми, обеспечивая экипажу удобство ручного управления.
Недостатком этого способа является наличие радиальных составляющих импульсов при уменьшении относительной скорости ΔVПР, которые увеличивают затраты топлива на сближение. Кроме этого, в случае срыва импульсов уменьшения относительной скорости возможно столкновение КО и ДКО с относительной скоростью ΔVПР.
Известен способ управления движением ПК «Союз», исполняющего роль КО, при сближении с Международной космической станцией (МКС), исполняющей роль ДКО [2. Брагазин А.Ф. Управление сближением космических аппаратов (навигация, наведение, коррекция движения). Королев: РКК «Энергия». 2018. С. 395-401], выбранный в качестве прототипа, который обеспечивает выведение КО в окрестность ДКО путем приложения к КО импульсов скорости. При этом импульсы рассчитываются и выполняются в автоматическом режиме на основе измерений относительного положения КО и ДКО. Данный способ поясняется фиг. 2, на которой изображен переход КО на орбиту ДКО, и фиг. 3, на которой приведена фазовая траектория - график зависимости относительной скорости сближения р от относительной дальности р. Способ включает переход КО 1 к ДКО 2 по траектории 3 с относительной скоростью ΔVПР и поэтапное уменьшение относительной скорости для окончательного перехода КО на орбиту ДКО (фиг. 2). При этом для исключения столкновения объектов КО выводится в точку прицеливания 5, вынесенную на расстояние Аг от ДКО. Уменьшение относительной скорости осуществляется в несколько этапов за счет выполнения импульсов, прикладываемых к КО в точках 4 и определяемых математически при пересечении фазовой траекторией 6 линии торможения 7 (фиг. 3). Уменьшение относительной скорости в несколько этапов обусловлено требованиями безопасности полета и особенностями работы автоматики сближения. На каждом этапе уменьшения относительной скорости траектория КО формируется таким образом, чтобы в случае выхода параметров сближения из допустимых диапазонов обеспечить безопасное расхождение с ДКО без приложения дополнительных импульсов. После уменьшения относительной скорости КО окончательно переходит на орбиту ДКО, выполняет облет ДКО и стыковку с ним.
Недостатком этого способа является то, что при выборе точки прицеливания с радиальным или продольным смещением относительно ДКО затраты топлива КО на уменьшение относительной скорости возрастают из-за появления радиальных составляющих импульсов. При использовании траекторий, обеспечивающих безопасное расхождение с ДКО на каждом этапе уменьшения относительной скорости, увеличивается время сближения и количество требуемых динамических операций. Кроме этого, в случае сбоя при расчете импульсов или отказа бортовых средств измерения относительного положения может возникнуть необходимость перехода на ручной режим управления. При выборе точки прицеливания в произвольном направлении от ДКО траектория относительного движения формируется таким образом, что экипаж не имеет исчерпывающего представления о ней, а поскольку уменьшение относительной скорости осуществляется по математическому признаку, экипаж также не способен визуально определить точки приложения импульсов, их ориентацию и величину. Для выполнения импульсов большой величины вблизи ДКО требуется изменение ориентации КО, что в случае автоматического сближения может привести к потере радиосигнала с ДКО, а в случае ручного управления - к потере экипажем визуального контакта с ДКО. В связи с этим переход на ручной режим при таком способе управления возможен только на малой дальности от ДКО при достижении допустимых условий по относительной скорости и угловой скорости линии визирования. При отсутствии на КО или ДКО бортовых средств измерения относительного положения, а также без формирования удобной и безопасной траектории подхода реализовать сближение и стыковку будет затруднительно как в автоматическом, так и в ручном режиме.
Техническим результатом изобретения является повышение надежности проведения сближения при сохранении безопасности полета КО и ДКО.
Технический результат достигается тем, что в способе управления движением КО при сближении с ДКО, включающем приложение к КО импульсов скорости для выведения КО в точку в окрестности ДКО, вынесенную на заданное расстояние от него, с относительной скоростью ΔVПР и уменьшение относительной скорости для перехода КО на орбиту ДКО, в отличие от известного, КО выводят в точку, расположенную на расстоянии Δb от ДКО в направлении, перпендикулярном плоскости его орбиты, а уменьшение относительной скорости осуществляют путем приложения к КО в данной точке импульса скорости, равного значению относительной скорости ΔVПР и направленного вдоль вектора орбитальной скорости КО.
Высокая надежность проведения сближения в описываемом способе управления обеспечивается за счет формирования траектории сближения, не требующей многократного изменения ориентации КО вблизи ДКО. При сближении в автоматическом режиме уменьшение относительной скорости осуществляют путем приложения к КО одного импульса ΔVПР вдоль вектора его орбитальной скорости в момент прохождения КО точки прицеливания, после чего дальнейшее сближение КО с ДКО с расстояния Δb осуществляется вдоль линии визирования ДКО. При этом сближение вдоль линии визирования не требует изменения ориентации КО вблизи ДКО, что обеспечивает условия для устойчивого приема радиосигнала от ДКО. В случае необходимости перехода на ручной режим, например из-за отказа средств измерения относительного положения, или при ручном сближении без использования этих средств уменьшение относительной скорости также осуществляется по достижении КО точки прицеливания путем приложения к нему одного импульса ΔVПР вдоль вектора орбитальной скорости. При этом достижение КО точки прицеливания определяется экипажем визуально в момент пересечения КО фронтальной плоскости ДКО, перпендикулярной вектору его орбитальной скорости, а величина и ориентация этого импульса являются типовыми и в отличие от прототипа не требуют проведения сложных математических расчетов. Последующее сближение вдоль прямой линии с малой угловой скоростью линии визирования обеспечивает экипажу полное представление о характере относительного движения и удобство визуального контроля ДКО без изменения ориентации КО. Безопасность полета КО и ДКО обеспечивается за счет выведения КО в точку прицеливания, вынесенную на расстояние Δb от ДКО, что в случае срыва импульса уменьшения относительной скорости обеспечивает безопасное расхождение КО с ДКО на расстоянии Δb. После выполнения импульса уменьшения относительной скорости ΔVПР и согласования орбитальных скоростей КО и ДКО дальнейшее сближение с расстояния Δb осуществляется за счет рассогласования плоскостей орбит КО и ДКО, обусловленного выбором точки прицеливания в направлении, перпендикулярном плоскости орбиты ДКО, при этом пассивное сближение и переход КО на ось стыковочного узла ДКО осуществляется с малой скоростью. Таким образом, предлагаемый способ позволяет повысить надежность проведения сближения при сохранении безопасности полета КО и ДКО.
Технический результат в предлагаемом способе управления достигается за счет формирования траектории подхода КО к ДКО, обеспечивающей возможность уменьшения относительной скорости с помощью одного импульса с известной величиной и ориентацией. При этом уменьшение относительной скорости может осуществляться как в автоматическом, так и в ручном режиме. В случае срыва импульса уменьшения относительной скорости движение по такой траектории обеспечивает безопасное расхождение КО с ДКО.
Для пояснения предлагаемого способа управления приводятся фиг. 1÷4, где:
на фиг. 1 представлена схема сближения аналога, обеспечивающая экипажу удобство ручного управления;
на фиг. 2 представлена схема сближения прототипа, обеспечивающая сближение КО с ДКО в автоматическом режиме с поэтапным уменьшением относительной скорости;
на фиг. 3 представлен график фазовой траектории, используемый в прототипе для математического определения точек приложения импульсов уменьшения относительной скорости;
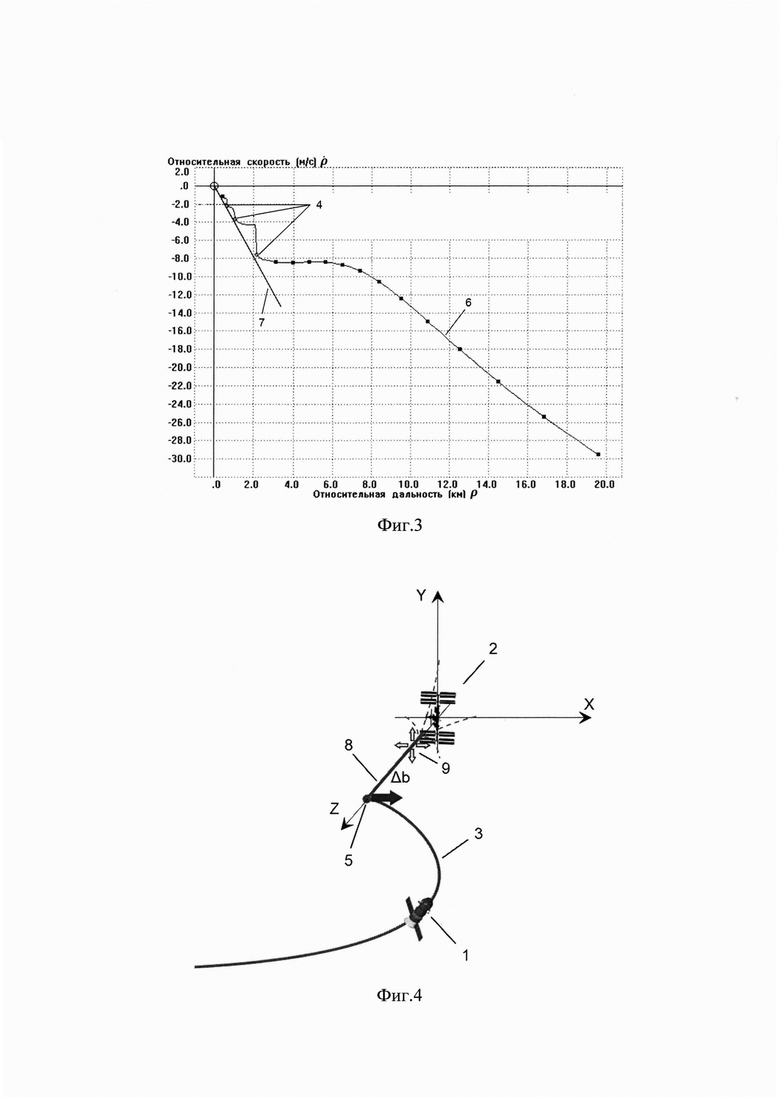
на фиг. 4 представлена схема сближения при предлагаемом способе управления.
На этих фиг. отмечены следующие позиции: 1 - КО, 2 - ДКО, 3 - траектория подхода КО относительно ДКО, 4 - точки приложения импульсов для уменьшения относительной скорости, 5 - точка прицеливания КО, вынесенная от ДКО, 6 - фазовая траектория КО - график зависимости относительной скорости сближения р от относительной дальности р, 7 - линия торможения, 8 - траектория сближения КО с ДКО после уменьшения относительной скорости, 9 - импульс, обеспечивающий безопасное расхождение КО и ДКО в случае выхода параметров сближения за допустимые пределы.
Суть предлагаемого способа поясняется фиг. 4, на которой представлена схема сближения при предлагаемом способе управления. КО 1 движется в окрестность ДКО 2 по траектории 3, обеспечивающей в точке прицеливания 5 безопасное расхождение КО и ДКО с относительной скоростью ΔVПР.При этом точка прицеливания 5 вынесена на расстояние Δb от ДКО в направлении, перпендикулярном плоскости орбиты ДКО. По достижении точки прицеливания 5 к КО прикладывают импульс для уменьшения относительной скорости, при этом величина приращения характеристической скорости импульса соответствует значению ΔVПР, а направление импульса совпадает с орбитальной скоростью КО. После выполнения этого импульса и согласования орбитальных скоростей КО и ДКО, дальнейшее сближение КО с ДКО осуществляется вдоль прямой линии 8. При необходимости в случае выхода параметров сближения за допустимые пределы для безопасного расхождения КО и ДКО к КО прикладывают импульс 9 в направлении, перпендикулярном линии визирования.
Рассмотрим пример реализации предложенного способа в автоматическом режиме. Пусть в качестве ДКО рассматривается ОС, с которой должен безопасно сблизиться и состыковаться ПК типа «Союз», рассматриваемый в качестве КО. Поскольку используемая при сближении бортовая радиосистема измерения относительного положения устойчиво работает в диапазоне относительных скоростей 8-12 м/с, ПК выводят в окрестность ОС с наиболее оптимальной относительной скоростью ΔVПР=10 м/с.А поскольку по результатам статистических испытаний выведение ПК в окрестность ОС реализуется с боковыми разбросами в диапазоне±0,5 км, для обеспечения безопасности полета точка прицеливания должна быть вынесена на достаточное расстояние от ОС, например Δb=1 км, в направлении, перпендикулярном к плоскости орбиты ОС. При этом для создания удобных условий освещенности ОС точку прицеливания выносят в сторону Солнца. По достижении точки прицеливания к ПК прикладывают импульс уменьшения относительной скорости, при этом его величина соответствует относительной скорости в точке прицеливания ΔVПР, равной 10 м/с, а направление импульса соответствует вектору орбитальной скорости ПК. Математическим критерием для выполнения этого импульса в автоматическом режиме может быть либо достижение фазовой траекторией минимальной дальности 1 км, либо достижение расчетного времени перехода в точку прицеливания. В случае невыполнения импульса уменьшения относительной скорости обеспечивается безопасное прохождение ПК сбоку от ОС на расстоянии Δb=1 км. После выполнения импульса уменьшения относительной скорости осуществляют разворот ПК в направлении ОС, а затем выполняют переход ПК к оси стыковочного узла ОС. При этом переход к оси стыковочного узла с расстояния Δb, равного 1 км, осуществляется без изменения ориентации и приложения дополнительных импульсов. По требованиям безопасности полета при достижении дальности 400 м относительная скорость сближения не должна превышать 2 м/с, а угловая скорость линии визирования 0,3%. В случае отсутствия возможности сформировать параметры сближения в допустимых пределах к ПК прикладывают импульс, обеспечивающий безопасное расхождение с ОС. При этом импульс прикладывают перпендикулярно линии визирования в направлении орбитальной скорости ПК, либо в противоположном направлении, что обеспечит условия для повторного подхода в автоматическом режиме. Приращение скорости в 1 м/с является достаточным для безопасного расхождения с ОС на данном участке. На случай отказа системы управления данный импульс может быть предварительно запрограммирован в бортовой вычислительной машине ПК. По достижении ПК оси стыковочного узла ОС выполняют окончательное уменьшение относительной скорости, после чего осуществляют стыковку ПК с ОС. Измерения параметров относительного движения при реализации предложенного способа в автоматическом режиме могут быть получены с использованием аппаратуры радиосистемы «Курс-НА», либо аппаратуры спутниковой навигации АСН, а выполнение импульсов осуществляют с использованием двигателя коррекции и сближения СКД или двигателей причаливания и ориентации ДПО.
Рассмотрим аналогичный пример реализации предложенного способа в ручном режиме. По достижении точки прицеливания к ПК прикладывают импульс уменьшения относительной скорости, при этом приращение характеристической скорости соответствует величине относительной скорости в точке прицеливания ΔVПР, равной 10 м/с, а направление импульса соответствует вектору орбитальной скорости ПК. Точку приложения импульса уменьшения относительной скорости можно определить визуально при пересечении ПК фронтальной плоскости ОС, перпендикулярной вектору ее орбитальной скорости, либо по достижении расчетного времени перехода в точку прицеливания. В случае невыполнения импульса уменьшения относительной скорости обеспечивается безопасное прохождение ПК сбоку от ОС на расстоянии Δb=1 км. После выполнения импульса уменьшения относительной скорости осуществляют разворот ПК в направлении ОС, а затем выполняют переход ПК к оси стыковочного узла ОС. При этом переход к оси стыковочного узла с расстояния Δb, равного 1 км, осуществляется с малой скоростью вдоль линии визирования. При таком переходе для экипажа обеспечивается удобство ручного управления и возможность парирования траекторных разбросов по визуальным наблюдениям путем приложения импульсов скорости, направленных перпендикулярно линии визирования ОС.
Продолжительность пассивного сближения на этом участке для околоземной орбиты высотой 400 км и периодом обращения 92 минуты составляет 23 минуты (четверть витка), и к моменту достижения ПК ОС относительная скорость составит 1,2 м/с.Для скорейшего завершения стыковки экипаж при необходимости может увеличить скорость сближения, выполнив импульс вдоль линии визирования ОС. По достижении дальности 400 м в случае несоответствия параметров сближения допустимым значениям экипаж выполняет импульс, обеспечивающий безопасное расхождение с ОС. При этом импульс величиной 1 м/с прикладывают перпендикулярно линии визирования в радиальном направлении, что обеспечит условия для повторного подхода в ручном режиме через виток. Для экономии топлива ПК, ОС может быть предварительно развернута стыковочным узлом в направлении точки прицеливания, что позволит отказаться от облета ОС, уменьшить количество требуемых динамических операций ПК, и следовательно, снизить затраты топлива на проведение стыковки. При реализации предложенного способа в ручном режиме управление движением осуществляют с использованием ручек управления движением РУД и ручек управления ориентацией РУД или путем включения двигателя коррекции и сближения СКД с пульта космонавта ПК «Нептун МЭ», а визуальный контроль сближения осуществляют с использованием визира специального комплекса ВСК-4, телекамеры КЛ-153-01 и иллюминаторов спускаемого аппарата ПК типа «Союз».
Таким образом, представленные примеры управления сближением с применением предложенного способа показывают возможность проведения надежных и безопасных стыковок космических объектов как в автоматическом, так и в ручном режимах.
Предложенный способ также может использоваться при отсутствии на космических объектах бортовых средств измерения относительного положения, что позволяет проводить сближение с объектами для их инспекции без выполнения стыковки. Например, при использовании коэллиптической орбиты переход КО к ДКО можно выполнить по визуальным наблюдениям ДКО без проведения сложных расчетов. Также предложенный способ может быть использован при проведении стыковок с элементами межпланетной транспортной системы, например при реализации полета к Луне по двухпусковой схеме, когда требуется осуществить стыковку ПК с разгонным блоком для выполнения отлетного импульса к Луне. Использование предложенного способа в особо важных космических программах позволит существенно повысить безопасность и надежность миссий, в которых ограничения по топливу и длительности автономного полета играют значительную роль.
Предлагаемый способ может быть использован при сближении с космическими аппаратами для инспекции, при проведении стыковок космических кораблей с орбитальными станциями, а также при реализации Лунной программы.
Изобретение относится к области космической техники, а именно к способам сближения космических объектов. Способ управления движением космического объекта (КО) при сближении с другим космическим объектом (ДКО) включает приложение к КО импульсов скорости для выведения КО в точку в окрестности ДКО с относительной скоростью ΔVПР и уменьшение относительной скорости для перехода КО на орбиту ДКО. При этом КО выводят в точку, расположенную на расстоянии Δb от ДКО в направлении, перпендикулярном плоскости его орбиты, а уменьшение относительной скорости осуществляют путем приложения к КО в данной точке импульса скорости, равного значению относительной скорости ΔVПР и направленного вдоль вектора орбитальной скорости КО. Достигается повышение надежности проведения сближения при сохранении безопасности полета КО и ДКО. 4 ил.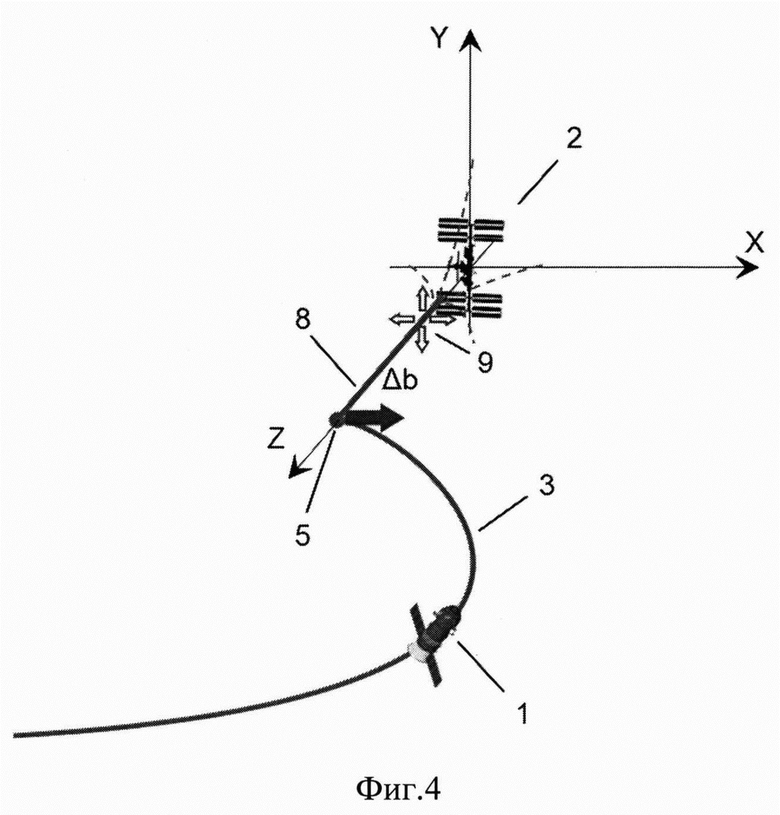
Способ управления движением космического объекта при сближении с другим космическим объектом, включающий приложение к космическому объекту импульсов скорости для выведения космического объекта в точку в окрестности другого космического объекта, вынесенную на заданное расстояние от него, с относительной скоростью ΔVПР и уменьшение относительной скорости для перехода космического объекта на орбиту другого космического объекта, отличающийся тем, что космический объект выводят в точку, расположенную на расстоянии Δb от другого космического объекта в направлении, перпендикулярном плоскости его орбиты, а уменьшение относительной скорости осуществляют путем приложения к космическому объекту в данной точке импульса скорости, равного значению относительной скорости ΔVПР и направленного вдоль вектора орбитальной скорости космического объекта.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С ДРУГИМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2020 |
|
RU2759360C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2562908C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| US 8768622 B2, 01.07.2014. | |||
