ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к изготовлению композитов, а в частности, к системе и способу определения направления и пространственного разнесения траекторий волокон для укладки композитных жгутов с образованием композитного слоя.
УРОВЕНЬ ТЕХНИКИ
[0002] Проектирование слоистого композиционного материала включает определение одного или более углов волокон для каждого композитного слоя в слоистом композиционном материале. Например, инженер-конструктор может указать углы волокон каждого композитного слоя, измеряемого относительно опорного направления на поверхности композитного слоя. Для визуализации и для использования в вычислительных алгоритмах, таких как программы расчета изделия на прочность, углы волокон могут быть представлены векторным полем на поверхности композитного слоя. Для изготовления композитного слоя инженер-технолог может моделировать углы волокон в виде непрерывных траекторий волокон при программировании оборудования автоматизированной установки. Например, автоматизированная установка для укладки волокон (AFPM) может быть запрограммирована на укладку множества рядов изменяющейся ширины, содержащих множество композитных жгутов, вдоль траекторий волокон с образованием каждого композитного слоя. Каждый ряд может содержать заданное количество композитных жгутов, каждый из которых представляет собой непрерывную полосу однонаправленного композиционного материала. Автоматизированная установка для укладки волокон может укладывать множество композитных слоев друг на друга с образованием композитной укладки. Композитная укладка может быть отверждена с образованием слоистого композиционного материала.
[0003] Для композитного слоя, имеющего плоскую форму и постоянное распределение волокон по углам, траектории волокон являются прямыми и параллельными друг другу. Когда плоский композитный слой с постоянными углами волокон укладывается, например, с использованием автоматизированной установки для укладки волокон (AFPM), ряды могут быть выровнены кромка к кромке без перекрытий и зазоров между соседними рядами. Однако для композитного слоя, имеющего криволинейный контур и/или непостоянное распределение волокон по углам, траектории волокон, которые проходят по направлениям волокон, указанным в распределении волокон по углам, могут быть не параллельны друг другу. В результате ряды могут сходиться и/или расходиться в определенных местах на композитном слое, вызывая появление перекрытий и/или зазоров между соседними рядами. Перекрытия и зазоры могут отрицательно влиять на конструктивные свойства (например, прочность, жесткость), качество поверхности и технологичность слоистого композиционного материала. Кроме того, неспособность инженеров-конструкторов учитывать влияние сходимости и расхождения на технологичность слоистого композиционного материала может привести к дорогостоящей и трудоемкой доработке слоистого композиционного материала во время изготовления. Кроме того, неспособность учитывать сходимость и расхождение во время этапа проектирования слоистого композиционного материала может означать, что более эффективные проекты указанного материала никогда не учитываются.
[0004] Как следует из указанного, в данной области техники существует потребность в системе и способе определения траекторий волокон, которые соответствуют распределению волокон по углам, заданному для композитного слоя, что позволяет оптимизировать пространственное разнесение траекторий волокон посредством количественной оценки сходимости и/или расхождения таких траекторий волокон.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Вышеуказанные потребности, связанные с определением траекторий волокон, в частности рассматриваются и смягчаются раскрытием настоящего изобретения, которое обеспечивает способ определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности и определении углов волокон, имеющем один или более углов волокон. Способ включает формирование аппроксимации поверхности для определения поверхности, содержащей триангулированную поверхность, имеющую сетку треугольников. Композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон. Способ включает определение на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон. Кроме того, способ включает определение на триангулированной поверхности второго поля единичных векторов посредством поворота, на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками. Способ также включает определение на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности.
[0006] Способ также включает определение функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов. Кроме того, способ включает определение потенциальной функции, имеющей контурные линии, при этом потенциальная функция является первой потенциальной функцией, определенной выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов. Способ также включает выполнение нормализации потенциальной функции посредством применения масштабирующей функции к потенциальной функции таким образом, что контурные линии равномерно распределены по триангулированной поверхности. Кроме того, способ включает использование контурных линий нормализованной потенциальной функции в качестве траекторий волокон для изготовления композитного слоя посредством укладки рядов композитной ленты вдоль траекторий волокон. Например, способ включает использование контурных линий в качестве траекторий волокон в программе укладки, которая используется автоматизированной установкой для укладки волокон для укладки рядов композитной ленты.
[0007] Также раскрыта процессорная система для определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности композитного слоя и определении углов волокон, имеющем один или более углов волокон. Процессорная система включает в себя аппроксиматор поверхности, выполненный с возможностью формирования аппроксимации поверхности для композитного слоя, содержащей триангулированную поверхность, включающей сетку треугольников, представляющую определение поверхности. Как отмечено выше, композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон. Процессорная система также включает в себя определитель векторного поля, выполненный с возможностью определения на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон. Определитель векторного поля дополнительно выполнен с возможностью определения на триангулированной поверхности второго поля единичных векторов посредством поворота, на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками. Определитель векторного поля также выполнен с возможностью определения на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности.
[0008] Кроме того, процессорная система включает в себя минимизатор ротора, выполненный с возможностью определения функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов. Кроме того, процессорная система включает в себя определитель потенциальной функции, выполненный с возможностью определения потенциальной функции в виде первой потенциальной функции выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов на триангулированной поверхности. Процессорная система также включает в себя нормализатор потенциальной функции, выполненный с возможностью осуществления нормализации потенциальной функции посредством определения и применения масштабирующей функции к потенциальной функции таким образом, что контурные линии потенциальной функции равномерно распределены по триангулированной поверхности посредством задания постоянных значений потенциальной функции, которые изменяются с фиксированными интервалами между соседними парами контурных линий. Кроме того, процессорная система включает в себя определитель программы укладки, выполненный с возможностью использования контурных линий нормализованной потенциальной функции в качестве траекторий волокон в программе укладки для изготовления композитного слоя.
[0009] Указанные признаки и функции могут быть реализованы независимо в различных вариантах реализации раскрытия настоящего изобретения или могут быть скомбинированы с получением других вариантов реализации изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Эти и другие признаки раскрытия настоящего изобретения станут более очевидными со ссылкой на чертежи, на которых одинаковые числовые обозначения относятся к одинаковым частям и на которых:
[0011] на ФИГ. 1 проиллюстрирована блок-схема, включающая операции способа определения направления и пространственного разнесения траекторий волокон для композитного слоя;
[0012] на ФИГ. 2 приведен вид в перспективе примера слоистого композиционного материала, выполненного из множества композитных слоев, каждый из которых может быть уложен с прохождением по траекториям волокон, определенным с использованием раскрытых в настоящем документе системы и способа;
[0013] на ФИГ. 3 приведен вид сбоку слоистого композиционного материала по ФИГ. 2, иллюстрирующий неплоский контур слоистого композиционного материала;
[0014] на ФИГ. 4 приведен вид в перспективе примера композитного слоя, имеющего неплоский контур и постоянные углы волокон;
[0015] на ФИГ. 5 приведен вид в перспективе примера композитного слоя, имеющего плоскую форму и непостоянные углы волокон;
[0016] на ФИГ. 6 приведен вид в перспективе примера определения поверхности композитного слоя, имеющего неплоский контур;
[0017] на ФИГ. 7 приведен вид в перспективе примера определения непостоянных углов волокон композитного слоя по ФИГ. 6;
[0018] на ФИГ. 7А приведен увеличенный вид части композитного слоя по ФИГ. 7, показывающий ориентацию волокон на основании определения углов волокон;
[0019] на ФИГ. 8 приведен вид в перспективе примера аппроксимации поверхности для композитного слоя по ФИГ. 6, на котором аппроксимация поверхности представляет собой триангулированную поверхность, имеющую сетку треугольников и которая для целей иллюстрации показана в виде грубой сетки;
[0020] на ФИГ. 9 приведен вид в перспективе примера множества векторов первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из множества треугольников (не показаны, чтобы не загромождать чертеж);
[0021] на ФИГ. 9А приведен увеличенный вид части композитного слоя по ФИГ. 9, иллюстрирующий направление 0 градусов, представленное вектором первого поля единичных векторов для одного из треугольников;
[0022] на ФИГ. 10 приведен вид в перспективе примера множества векторов второго поля единичных векторов, определенного на триангулированной поверхности (треугольники не показаны, чтобы не загромождать чертеж) и полученного посредством поворота векторов первого поля единичных векторов вокруг нормалей к поверхности треугольников на углы волокон, заданные определением углов волокон композитного слоя, и при этом векторы второго поля единичных векторов представляют локальные направления волокон;
[0023] на ФИГ. 10А приведен увеличенный вид части композитного слоя по ФИГ. 10, иллюстрирующий поворот первого единичного вектора на треугольнике на заданный угол волокон вокруг нормали к поверхности треугольника;
[0024] на ФИГ. 11 приведен вид в перспективе примера третьего поля единичных векторов, определенного на триангулированной поверхности (треугольники не показаны, чтобы не загромождать чертеж) посредством поворота векторов второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности треугольников;
[0025] на ФИГ. 11А приведен увеличенный вид части композитного слоя по ФИГ. 11, иллюстрирующий поворот второго единичного вектора треугольника на 90° вокруг нормали к поверхности треугольника;
[0026] на ФИГ. 12 приведен вид в перспективе примера множества векторов поля неединичных векторов, определенного на триангулированной поверхности (чтобы не загромождать чертеж, треугольники не показаны) посредством масштабирования векторов третьего поля единичных векторов с использованием функции величины, представляющей величину градиента потенциальной функции;
[0027] на ФИГ. 12А приведен увеличенный вид части композитного слоя по ФИГ. 12, иллюстрирующий неединичный вектор, связанный с треугольником и масштабированный согласно функции величины;
[0028] на ФИГ. 13 приведен вид в перспективе примера первой потенциальной функции композитного слоя, имеющего контурные линии, представляющие траектории волокон, аппроксимирующие распределение углов волокон с соответствующим приближением ко второму полю единичных векторов;
[0029] на ФИГ. 14 приведен вид в перспективе примера второй потенциальной функции композитного слоя, представляющей улучшенное выравнивание контурных линий со вторым полем единичных векторов;
[0030] на ФИГ. 15 приведен вид в перспективе примера третьей потенциальной функции композитного слоя, представляющей дополнительное улучшенное выравнивание контурных линий со вторым полем единичных векторов;
[0031] на ФИГ. 16 приведен вид в перспективе примера контурных линий композитного слоя после выполнения нормализации потенциальной функции, на котором контурные линии имеют в целом равномерное пространственное разнесение;
[0032] на ФИГ. 17 приведен вид сбоку примера автоматизированной установки для укладки волокон, наносящей ряд композиционного материала (например, композитную ленту) на укаладочное приспособление сложной формы;
[0033] на ФИГ. 18 приведен вид в перспективе примера автоматизированной установки для укладки волокон, производящей укладку рядов на укаладочное приспособление сложной формы с прохождением по траекториям волокон, определенным раскрытым в настоящем документе способом;
[0034] на ФИГ. 19 приведен увеличенный вид в перспективе аппликаторной головки по ФИГ. 18, которая проходит по траекториям волокон при укладке рядов на укаладочное приспособление;
[0035] на ФИГ. 20 приведен вид сверху аппликаторной головки, выполненный вдоль линии 20 по ФИГ. 19 и иллюстрирующий среднюю линию аппликаторной головки, поддерживающую выравнивание с тракторией волокна при выполнении укладки аппликаторной головкой рядов на укаладочное приспособление;
[0036] на ФИГ. 21 приведен вид сверху двух рядов, расположенных частично с перекрытием и частично с зазором относительно друг друга в результате нормализации с усреднением потенциальной функции;
[0037] на ФИГ. 22 приведен вид сверху двух рядов, расположенных с перекрытием относительно друг друга, без зазоров между рядами в результате нормализации по ширине головки для потенциальной функции;
[0038] на ФИГ. 23 приведен вид сверху примера неодносвязной поверхности, имеющей отверстие, вызывающее нарушение непрерывности в контурной линии, определенной раскрытым в настоящем документе способом;
[0039] на ФИГ. 24 приведен вид сверху примера неодносвязной поверхности по ФИГ. 23, на котором поверхность разделена на области, в которых потенциальная функция имеет соединенные контурные линии;
[0040] на ФИГ. 25 приведен вид в перспективе примера летательного аппарата, имеющего один или более композиционных структур, изготовленных в процессе, реализующем раскрытые в настоящем документе систему и способ;
[0041] на ФИГ. 26 приведен вид в перспективе примера композитного слоя композитной обшивки фюзеляжа летательного аппарата по ФИГ. 25 и иллюстрирующий траектории волокон для укладки композитного слоя с постоянным распределением углов волокон под 45°;
[0042] на ФИГ. 27 приведена структурная схема примера процессорной системы для осуществления одной или более операций раскрытого в настоящем документе способа определения направления и пространственного разнесения траекторий волокон для композитного слоя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0043] Далее со ссылкой на чертежи, которые показаны с целью иллюстрации предпочтительных и различных вариантов реализации раскрытия изобретения, на ФИГ. 1 показана блок-схема операций, содержащихся в способе 100 определения направления и пространственного разнесения 316 траекторий 314 волокон (например, ФИГ. 16 и 19-22) для укладки композитного слоя 202 (ФИГ. 2-3) слоистого композиционного материала 200 (ФИГ. 2-3). Как описано ниже со ссылкой на ФИГ. 2-27, раскрытые в настоящем документе способ 100 и система 500 (ФИГ. 27) определяют потенциальную функцию ϕ (например, ФИГ. 13, 14 и 15) на аппроксимации поверхности (например, триангулированной поверхности 218 - ФИГ. 8) для композитного слоя 202. Потенциальная функция ϕ имеет контурные линии 310 (например, ФИГ. 13, 14, 15), которые соответствуют определению 226 углов волокон (например, ФИГ. 4, 5 и 7), заданных для композитного слоя 202. После определения потенциальной функции ϕ потенциальную функцию ϕ нормализуют посредством применения масштабирующей функции к потенциальной функции ϕ равномерного распределения контурных линий 310 по триангулированной поверхности 218 (например, ФИГ. 8). Контурные линии 310 нормализованной потенциальной функции (h°ϕ - ФИГ. 16) используются в качестве траекторий 314 волокон (ФИГ. 19-20) для изготовления композитного слоя 202. Например, контурные линии 310 могут быть использованы в программе укладки для автоматизированной установки 400 для укладки волокон (AFPM - ФИГ. 17-19), в которой средняя линия 410 (ФИГ. 20) аппликаторной головки 406 (ФИГ. 18-20) автоматизированной установки 400 для укладки волокон проходит по траекториям 314 волокон при укладке рядов 206 однонаправленной композитной ленты 208 (ФИГ. 19-20) для изготовления композитного слоя 202. Используя раскрытые в настоящем документе способ 100 и систему 500, оптимизируют траектории 314 волокон для уменьшения или минимизации сходимости или расхождения траекторий волокон, возникающей вследствие определения 226 углов волокон (например, ФИГ. 7), заданных для композитного слоя 202, и/или вследствие геометрии (например, кривизны) определения 214 поверхности (например, ФИГ. 6) композитного слоя 202.
[0044] Потенциальная функция ϕ может быть математически выражена как:

где М - модель поверхности (не показано) композитного слоя 202, a R - координатная линия. Уравнение 100 означает, что для любого положения на поверхности М может быть вычислена потенциальная функция ϕ. Как отмечено выше, траектория 314 волокна (например, ФИГ. 16 и 19-20) является контурной линией 310, которая является решением выражения:

где с является константой. Как описано более подробно ниже, расстояние или пространственное разнесение 316 (например, ФИГ. 16 и 19-20) между соседними траекториями 314 волокон представляет собой обратную величины градиента ||∇ϕ|| потенциальной функции ϕ. Относительно большое значение величины градиента ||∇ϕ|| соответствует относительно малому пространственному разнесению 316 между траекториями 314 волокон, а относительно малое значение величины градиента ||∇ϕ|| соответствует относительно большому пространственному разнесению 316 между траекториями 314 волокон.
[0045] На ФИГ. 2 приведен вид в перспективе слоистого композиционного материала 200, полученной посредством укладки множества композитных слоев 202 согласно заданной последовательности укладки в стопу. В некоторых примерах каждый из композитных слоев 202 может иметь уникальное определение 226 углов волокон (например, ФИГ. 4, 5 и 7). Каждый из композитных слоев 202 состоит из непрерывных армирующих волокон, предварительно пропитанных термопластичной матрицей или термореактивной матрицей (т.е. препрег). Как показано на ФИГ. 17-20 и описано ниже, каждый из композитных слоев 202 может быть получен посредством укладки рядов композитной ленты 208 в виде препрега вдоль траекторий 314 волокон, определенных раскрытыми в настоящем документе системой 500 (ФИГ. 27) и способом 100 (ФИГ. 1). Каждый ряд 206 композитной ленты 208 может содержать один или более однонаправленных композитных жгутов 204 (ФИГ. 17-19), которые могут быть использованы со стандартными величинами ширины (например, 0,125, 0,25, 0,50 дюйма (3,175, 6,35, 12,7 мм) и т.д.). Каждый композитный жгут может содержать тысячи армирующих элементарных нитей (не показано), которые могут быть выполнены из таких материалов, как углерод, карбид кремния, бор, керамика, стекло и/или металлический материал.
[0046] На ФИГ. 3 приведен вид сбоку слоистого композиционного материала 200 по ФИГ. 2, иллюстрирующий неплоский контур 222 слоистого композиционного материала 200. Как отмечено выше, раскрытые в настоящем документе система 500 и способ 100 могут преимущественно определять оптимизированные траектории 314 волокон (например, ФИГ. 16) при заданном определении 226 углов волокон (например, ФИГ. 4, 5 и 7) для композитного слоя 202, имеющего неплоский контур 222. Например, на ФИГ. 4 показаны композитный слой 202, имеющий неплоский контур 222, и определение 226 углов волокон, содержащее постоянные углы 228 волокон, для которого система 500 и способ 100 могут определять оптимизированные траектории 314 волокон. Кроме того, система 500 и способ 100 могут определять траектории 314 волокон для композитного слоя 202, имеющего плоскую форму 224 и определение 226 углов волокон, содержащее непостоянные углы 230 волокон, как показано на ФИГ. 5.
[0047] Со ссылкой на ФИГ. 6-7, раскрытые в настоящем документе система 500 и способ 100 описаны в контексте определения траектории 314 волокон для композитного слоя 202, имеющего определение 214 поверхности с неплоским контуром 222, как показано на ФИГ. 6, и/или определение 226 углов волокон, содержащее непостоянные углы 230 волокон, как показано на ФИГ. 7. На ФИГ. 7А приведен увеличенный вид части композитного слоя 202 по ФИГ. 7, показывающий ориентацию некоторых волокон 230, предписанную определением 226 углов волокон. Как отмечено выше, определение 226 углов волокон для каждого композитного слоя 202 в слоистого композиционного материала 200 может быть задано инженером-проектировщиком или специалистом по расчету напряжений так, чтобы соответствовать требованиям по прочности и жесткости для слоистого композиционного материала 200.
[0048] Со ссылкой на ФИГ. 8, этап 102 способа 100 (ФИГ. 1) включает в себя формирование аппроксимации Mh поверхности определения 214 поверхности (ФИГ. 6) композитного слоя 202, который в настоящем примере имеет неплоский контур 222. Способ 100 реализуют в среде конечных элементов, в которой аппроксимация Mh, поверхности композитного слоя 202 представляет собой триангулированную поверхность 218, состоящую из сетки плоских треугольников 220, определяющих линейные конечные элементы. Размер ячейки (т.е. размер каждого треугольника 220) предпочтительно достаточно мал, чтобы охватить поверхностные элементы в определении 214 поверхности, и достаточно большой, чтобы избежать дорогостоящего вычислительного процесса для определения и оптимизации траекторий 314 волокон. Триангулированная поверхность 218 обеспечивает вычислительную модель композитного слоя 202, которая позволяет оценить величину градиента потенциальной функции ϕ в качестве меры сходимости и расхождения траекторий 314 волокон.
[0049] Со ссылкой на ФИГ. 9 этап 104 способа 100 (ФИГ. 1) включает в себя определение на триангулированной поверхности 218 первого поля X0 единичных векторов (т.е. поля направлений), устанавливающего направление 302 величиной 0 градусов (ФИГ. 9А) для каждого из треугольников 220 (ФИГ. 8). Первое поле X0 единичных векторов служит в качестве композитной укладки опорного направления и может быть описано как розеточное направление, относительно которого измеряют углы волокон вышеупомянутого определения 226 углов волокон композитного слоя 202. В одном варианте реализации изобретения первое поле Х0 единичных векторов может быть определено посредством проецирования розеточного вектора физического пространства 300 (ФИГ. 9А) на триангулированную поверхность 218. В альтернативном варианте реализации изобретения первое поле Х0 единичных векторов может быть определено с использованием поля векторов градиента (не показано) потенциальной функции (не показано), определенного на поверхности. Примером является прямоугольник в плоскости ху (не показано), где градиент координаты х, например, дает первое поле единичных векторов. В целом, функции координат любой параметрической поверхности могут быть использованы аналогичным образом для получения первого поля единичных векторов. Еще одним примером может служить градиент функции высоты цилиндра (не показано), который позволяет получить первое поле единичных аксиальных векторов. Еще в одном варианте реализации изобретения первое поле Х0 единичных векторов может быть определено посредством оценки функции, которая описывает поле векторов как функцию координат поверхности. Например, первое поле Х0 единичных векторов может быть описано посредством определения функции для каждого из трех компонентов вектора по поверхности, например F(u,ν)={i(u,ν), j(u,ν), k(u,ν)}, где F={i,j,k} представляет поле векторов, а u и ν являются координатами поверхности. Если F(u,ν) находится в пространстве касательных к поверхности, то X0=F(u,ν)/||F(u,ν)||, в противном случае необходимо сначала спроецировать F(u,ν) на поверхность, а затем нормализовать проекцию, чтобы получить X0.
[0050] Со ссылкой на ФИГ. 10, этап 106 способа 100 (ФИГ. 1) включает в себя определение на триангулированной поверхности 218 второго поля X единичных векторов посредством поворота первого поля Х0 единичных векторов на указанные один или более углов 306 волокон (например, ФИГ. 7), заданных в определении 226 углов волокон. Первое поле Х0 единичных векторов поворачивают вокруг нормалей 304 к поверхности (ФИГ. 10А), соответственно соотнесенных с треугольниками 220 (показанными на ФИГ. 8; не показанными на ФИГ. 10, чтобы не загромождать чертеж). На ФИГ. 10А проиллюстрирован поворот первого единичного вектора Х0 треугольника 220 вокруг нормали 304 к поверхности треугольника 220. Первый единичный вектор Х0 поворачивают на угол 306 волокна, заданный (например, в определении 226 углов волокон) для треугольника 220. Как отмечено выше, определение 226 углов волокон для композитного слоя 202 может содержать постоянные углы 228 волокон (ФИГ. 4 - например, 0°, 22,5°, 30°, 45°, 90° и т.д.), или определение 226 углов волокон для композитного слоя 202 может содержать непостоянные углы 230 волокон (ФИГ. 5). В некоторых примерах определение 226 углов волокон для композитного слоя 202 может быть определено как функция координат поверхности на триангулированной поверхности 218. Например, если координатами поверхности являются u и ν, угол может быть описан как линейная функция:  где Lu и Lν являются характеристическими длинами в направлениях u и ν.
где Lu и Lν являются характеристическими длинами в направлениях u и ν.
[0051] Со ссылкой на ФИГ. 10-10A, поворот первого поля Х0 единичных векторов на углы 306 волокон, заданные в определении 226 углов волокон, и условия для определения потенциальной функции ϕ, которая соответствует углам волокон, могут быть описаны математически следующим образом. Пусть ТМ является касательным пучком к М, где М - поверхность композитного слоя 202. ТМ может быть описан как пространство всех касательных плоскостей для М. Если Х0 : М → ТМ - поле единичных векторов на М, и если θ : М → R - распределение углов в слое на М, то потенциальная функция ϕ соответствует распределению углов в слое, если:

где
RTM(θ) : М → SO(3) - поворот на угол θ в касательном пучке к М, а
SO(3) - пространство матриц поворота в трехмерном координатном пространстве.
Решение уравнения 102 существует, если M, θ и  являются гладкими, а Х0 является неисчезающим значением. Для данного поля Х0 единичных векторов и распределения θ углов в слое, может быть много потенциальных функций ϕ, которые являются решениями уравнения 102. Разные потенциальные функции ϕ имеют разные функции величины градиента, каждые из которых имеют разные степени технологичности в отношении величины сходимости и расхождения, связанной с функцией величины градиента. При данном решении потенциальной функции ϕ для уравнения 102 и с учетом h ∈ С∞, гладкой функции, композиция h о ϕ также является решением, учитывая, что:
являются гладкими, а Х0 является неисчезающим значением. Для данного поля Х0 единичных векторов и распределения θ углов в слое, может быть много потенциальных функций ϕ, которые являются решениями уравнения 102. Разные потенциальные функции ϕ имеют разные функции величины градиента, каждые из которых имеют разные степени технологичности в отношении величины сходимости и расхождения, связанной с функцией величины градиента. При данном решении потенциальной функции ϕ для уравнения 102 и с учетом h ∈ С∞, гладкой функции, композиция h о ϕ также является решением, учитывая, что:

по цепному правилу, как известно в данной области. В уравнении 103 h эффективно масштабирует градиенты вдоль контурной линии 310 в точке с на. h'(с). Если множества ϕ-1 (с) связаны, то решения уравнения 102 с ненулевым градиентом уникальны с точностью до композиции с потенциальными функциями ϕ в С∞ и аддитивных постоянных. Моделирование потенциальных функций для технологичности требует: (1) подбора потенциальной функции ϕ с приближением к полю  единичных векторов и (2) нахождения масштабирующей функции h, которая выдает желаемую функцию величины градиента.
единичных векторов и (2) нахождения масштабирующей функции h, которая выдает желаемую функцию величины градиента.
[0052] Со ссылкой на ФИГ. 11 этап 108 способа 100 (ФИГ. 1) включает в себя определение на триангулированной поверхности 218 третьего поля  единичных векторов, представляющего направление градиента ∇ϕ потенциальной функции ϕ, посредством поворота второго поля X единичных векторов на 90° вокруг соответствующей нормали 304 к триангулированной поверхности 218 (треугольники на ФИГ. 11 не показаны, чтобы не загромождать чертеж). Направление градиента ∇ϕ представляет направление, вдоль которого измеряют пространственное разнесение 316 контурных линий 310. На ФИГ. 11А показан поворот второго единичного вектора Х на 90° вокруг нормали 304 к поверхности треугольника 220. Третье поле
единичных векторов, представляющего направление градиента ∇ϕ потенциальной функции ϕ, посредством поворота второго поля X единичных векторов на 90° вокруг соответствующей нормали 304 к триангулированной поверхности 218 (треугольники на ФИГ. 11 не показаны, чтобы не загромождать чертеж). Направление градиента ∇ϕ представляет направление, вдоль которого измеряют пространственное разнесение 316 контурных линий 310. На ФИГ. 11А показан поворот второго единичного вектора Х на 90° вокруг нормали 304 к поверхности треугольника 220. Третье поле  единичных векторов может быть математически определено как
единичных векторов может быть математически определено как 
[0053] Со ссылкой на ФИГ. 12 этап 110 способа 100 (ФИГ. 1) включает в себя определение функции ƒ величины для масштабирования третьего поля  единичных векторов по триангулированной поверхности 218 (чтобы не загромождать чертеж, треугольники на ФИГ. 12 не показаны). Масштабирование третьего поля
единичных векторов по триангулированной поверхности 218 (чтобы не загромождать чертеж, треугольники на ФИГ. 12 не показаны). Масштабирование третьего поля  единичных векторов посредством функции ƒ величины приводит к тому, что поле Y неединичных векторов обеспечивает возможность подбора направлений контурных линий 310 потенциальной функции ϕ с приближением ко второму полю X единичных векторов, посредством минимизации ротора поля Y неединичных векторов. На ФИГ. 12А показан неединичный вектор Y, отмасштабированный согласно функции ƒ величины. На ФИГ. 12 каждый вектор в поле Y неединичных векторов масштабируют с получением величины, которая соответствует величине градиента 308 (т.е. скорости изменения) потенциальной функции ϕ. Чем больше неединичный вектор Y, тем меньше пространственное разнесение 316 (ФИГ. 13) между контурными линиями 310 (ФИГ. 13) и тем больше градиент 308 потенциальной функции ϕ. Поле Y неединичных векторов является первой аппроксимацией пространственного разнесения 316 (ФИГ. 16) между соседними контурными линиями 310 потенциальной функции ϕ. Как более подробно описано ниже, контурные линии 310 в конечном счете используются в качестве траекторий 314 волокон, вдоль которых производят укладку однонаправленных композитных жгутов 204 (ФИГ. 17-19) с образованием композитного слоя 202. Инверсия величины градиента представляет пространственное разнесение 316 между контурными линиями 310. Изменение величины градиента 308 вдоль направления контурной линии 310 означает сходимость, если величина градиента увеличивается, или расхождение, если величина градиента уменьшается. На изменение величины градиента влияют как углы волокон, заданные в определении 226 углов волокон (например, ФИГ. 4, 5 и 7), так и контур поверхности (например, величина кривизны поверхности) определения 214 поверхности (ФИГ. 6) композитного слоя 202.
единичных векторов посредством функции ƒ величины приводит к тому, что поле Y неединичных векторов обеспечивает возможность подбора направлений контурных линий 310 потенциальной функции ϕ с приближением ко второму полю X единичных векторов, посредством минимизации ротора поля Y неединичных векторов. На ФИГ. 12А показан неединичный вектор Y, отмасштабированный согласно функции ƒ величины. На ФИГ. 12 каждый вектор в поле Y неединичных векторов масштабируют с получением величины, которая соответствует величине градиента 308 (т.е. скорости изменения) потенциальной функции ϕ. Чем больше неединичный вектор Y, тем меньше пространственное разнесение 316 (ФИГ. 13) между контурными линиями 310 (ФИГ. 13) и тем больше градиент 308 потенциальной функции ϕ. Поле Y неединичных векторов является первой аппроксимацией пространственного разнесения 316 (ФИГ. 16) между соседними контурными линиями 310 потенциальной функции ϕ. Как более подробно описано ниже, контурные линии 310 в конечном счете используются в качестве траекторий 314 волокон, вдоль которых производят укладку однонаправленных композитных жгутов 204 (ФИГ. 17-19) с образованием композитного слоя 202. Инверсия величины градиента представляет пространственное разнесение 316 между контурными линиями 310. Изменение величины градиента 308 вдоль направления контурной линии 310 означает сходимость, если величина градиента увеличивается, или расхождение, если величина градиента уменьшается. На изменение величины градиента влияют как углы волокон, заданные в определении 226 углов волокон (например, ФИГ. 4, 5 и 7), так и контур поверхности (например, величина кривизны поверхности) определения 214 поверхности (ФИГ. 6) композитного слоя 202.
[0054] Математически процесс определения функции ƒ величины для масштабирования третьего поля  единичных векторов может быть описан с использованием того факта, что на односвязной поверхности М, поле векторов является градиентом потенциальной функции, если и только если ротор поля векторов обращается в нуль. Для дискретного поля векторов результат аналогичен. Определяя некоторую терминологию, дискретное поле Y векторов на аппроксимации Mh триангулированной поверхности с n треугольниками содержит набор векторов: Y=(Y0, …, Yn-1), где Yj - вектор в плоскости, определенной треугольником tj. Для триангулированной поверхности 218, имеющей треугольники ti и tj (не показано) с общим краем е, ориентированным положительно в ti определяют:
единичных векторов может быть описан с использованием того факта, что на односвязной поверхности М, поле векторов является градиентом потенциальной функции, если и только если ротор поля векторов обращается в нуль. Для дискретного поля векторов результат аналогичен. Определяя некоторую терминологию, дискретное поле Y векторов на аппроксимации Mh триангулированной поверхности с n треугольниками содержит набор векторов: Y=(Y0, …, Yn-1), где Yj - вектор в плоскости, определенной треугольником tj. Для триангулированной поверхности 218, имеющей треугольники ti и tj (не показано) с общим краем е, ориентированным положительно в ti определяют:

[0055] На односвязной триангулированной поверхности Mh (например, аппроксимации Mh поверхности на ФИГ. 9, не содержащей несвязанных частей поверхности и отверстий), Y является градиентом потенциальной функции, если и только если  для всех внутренних краев е. Уравнение 104 может быть переписано в понятиях умножения разреженной матрицы. Например, пусть количество внутренних краев в аппроксимации Mh поверхности составляет р, пусть количество треугольников составляет n, и пусть Е является матрицей р на 3n, состоящей из 1×3 блоков с (i, j)-ым блоком, равным плюс/минус i-ому внутреннему краю, если этот край смежен с j-ым треугольником 220 и отрицательно/положительно ориентирован в этом треугольнике 220, а в противном случае равным нулю. В понятиях разреженной матрицы Е уравнение 104 может быть переформулировано следующим образом:
для всех внутренних краев е. Уравнение 104 может быть переписано в понятиях умножения разреженной матрицы. Например, пусть количество внутренних краев в аппроксимации Mh поверхности составляет р, пусть количество треугольников составляет n, и пусть Е является матрицей р на 3n, состоящей из 1×3 блоков с (i, j)-ым блоком, равным плюс/минус i-ому внутреннему краю, если этот край смежен с j-ым треугольником 220 и отрицательно/положительно ориентирован в этом треугольнике 220, а в противном случае равным нулю. В понятиях разреженной матрицы Е уравнение 104 может быть переформулировано следующим образом:

[0056] В уравнении 105 дискретное поле векторов рассматривают как матрицу-столбец 3n на 1. Пусть IY является матрицей 3n на n, запись которой (3j+k, j) является (Yj)k для k ∈ {0,1,2} {k-ая координата j-го вектора Y), а в противном случае равна нулю. Поле векторов, которое является градиентом потенциальной функции и которое проходит в направлении поля Y ненулевых векторов, может быть построено из покоординатного положительного решения для:

где ƒ - вектор-столбец, представляющий элемент в множестве  содержащий все функции η: Mh → R, которые являются постоянными на каждом треугольнике Mh. Решения уравнения 106 являются элементами нулевого пространства EIY. Однако в нулевом пространстве нет нужды в покоординатно положительном векторе. Вместо этого уравнение 106 может быть переформулировано как задача оптимизации следующим образом:
содержащий все функции η: Mh → R, которые являются постоянными на каждом треугольнике Mh. Решения уравнения 106 являются элементами нулевого пространства EIY. Однако в нулевом пространстве нет нужды в покоординатно положительном векторе. Вместо этого уравнение 106 может быть переформулировано как задача оптимизации следующим образом:

при условии: ƒ>0. Если Y является аппроксимацией с приближением к непрерывному ненулевому векторному полю на компактной поверхности М, то открытое нижнее ограничение может быть заменено на 0 < ε ≤ ƒ, что является задачей выпуклой оптимизации на выпуклой области. Было замечено, что целевая функция может быть довольно плоской вблизи оптимума в той мере, что даже при очень жестких допусках нельзя получить хорошие масштабирующие функции ƒ из уравнения 107. Если используется норма  то проблема может быть переформулирована в виде следующей разреженной линейной программы:
то проблема может быть переформулирована в виде следующей разреженной линейной программы:

при условии: EIYƒ≤t1, EIYƒ≥t1, ƒ≥ε, t≥0,
где 1 - вектор-столбец всех из них. Для решения уравнения 108 с общими хорошими результатами может быть использован двойственный симплекс-метод.
[0057] Со ссылкой на ФИГ. 13 этап 112 способа 100 (ФИГ. 1) включает в себя определение потенциальной функции ϕ, которая соответствует углам волокон, заданным в определении 226 углов волокон, и также приводит к благоприятному пространственному разнесению 316 траекторий волокон в отношении влияния сходимости и расхождения траекторий волокон на технологичность и других соображений, таких как прочность и жесткость. На ФИГ. 13 приведен вид в перспективе первой потенциальной функции ϕН композитного слоя 202, имеющего контурные линии 310, представляющие траектории 314 волокон, аппроксимирующие распределение углов волокон, соответствующее второму полю X единичных векторов. Первую потенциальную функцию ϕH определяют посредством подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции ϕH наилучшим образом аппроксимируют направление и функцию ƒ величины поля Y неединичных векторов. В этом отношении, первая потенциальная функция ϕH имеет градиент, который является наилучшим возможным результатом подбора методом наименьших квадратов с приближением к функции ƒ величины и направлению поля Y неединичных векторов.
[0058] Процесс подбора методом наименьших квадратов может быть выполнен с использованием разложения Гельмгольца-Ходжа с целью нахождения потенциальной функции ϕ ∈Sh (т.е. первой потенциальной функции ϕH) таким образом, что градиент потенциальной функции ϕ имеет приблизительно то же направление, что и поле Y векторов (например, ФИГ. 12) на аппроксимации Mh, поверхности (например, ФИГ. 8). На Mh потенциальная функция является элементом множества Sh, содержащего все функции η: Mh → R, которые являются линейными на каждом треугольнике для Mh. Функцию в Sh можно рассматривать как кортеж чисел, по одному для каждой вершины Mh, а оператор градиента функции в Sh является линейным оператором, определенным матрицей ∇. Применение ∇ к функции в Sh дает поле векторов на Mh. Для выполнения этого соответствующее поле векторов  которое определяют определением (RTM(θ)) 226 углов волокон относительно розеточного направления (Х0), и задача заключается в нахождении потенциальной функции ϕ, которая лучше всего учитывает производственные соображения в отношении оптимизации сходимости и расхождения траекторий 314 волокон и градиент которой проходит в направлении Y. На аппроксимации Mh триангулированной поверхности с m вершинами и n треугольниками такая потенциальная функция ϕ может быть определена посредством решения следующей системы уравнений 2n на m:
которое определяют определением (RTM(θ)) 226 углов волокон относительно розеточного направления (Х0), и задача заключается в нахождении потенциальной функции ϕ, которая лучше всего учитывает производственные соображения в отношении оптимизации сходимости и расхождения траекторий 314 волокон и градиент которой проходит в направлении Y. На аппроксимации Mh триангулированной поверхности с m вершинами и n треугольниками такая потенциальная функция ϕ может быть определена посредством решения следующей системы уравнений 2n на m:

[0059] Решения уравнения 109 управляются посредством дискретного разложения Гельмгольца-Ходжа, где ∇ϕ является единственным бесповоротным слагаемым в разложении Гельмгольца-Ходжа для Y, вычисленным в качестве оптимизатора следующей задачи минимизации квадратичной функции:

[0060] Решение уравнения 110 может быть описано как первая потенциальная функция ϕH, градиент которой примерно соответствует как направлению, так и величине поля Y неединичных векторов (ФИГ. 12), и может привести к отклонениям между направлениями контурных линий 310 потенциальной функции ϕH и направлениями волокон (например, X, заданным определением 226 углов волокон) относительно опорного направления слоистого материала (представленного первым полем Х0 единичных векторов для композитного слоя 202). Если первая потенциальная функция ϕH, определенная на этапе 112, приводит к отклонению, превосходящему заданное пороговое значение (например, больше примерно 10°), первая потенциальная функция ϕH также может быть уточнена для уменьшения отклонения между направлениями контурных линий 310 и направлениями волокон, заданным определением углов волокон и/или для улучшения или оптимизации пространственного разнесения 316 между траекториями 314 волокон, как описано более подробно ниже в отношении определения второй потенциальной функции ϕI (например, см. ФИГ. 14), с возможный дополнительным уточнением с получением третьей потенциальной функции ϕA (например, см. ФИГ. 15).
[0061] Со ссылкой на ФИГ. 14 приведен вид в перспективе второй потенциальной функции ϕI с улучшенным выравниванием контурных линий 310 со вторым полем X единичных векторов относительно первой потенциальной функции ϕH. Как отмечено выше, если первая потенциальная функция ϕH отклоняется от определения 226 углов волокон на заданное пороговое значение, первая потенциальная функция ϕH может быть уточнена с получением второй потенциальной функции ϕI с использованием описанного ниже процесса оптимизации с интегрирующими множителями для улучшения выравнивания контурных линий 310 со вторым полем X единичных векторов. Один пример отклонения за пороговое значение может быть отклонением ориентации контурных линий 310 от направлений волокон (т.е. заданных определений углов волокон) на более чем 10° в каком-либо местоположении вдоль какой-либо из контурных линий 310. В таком случае первая потенциальная функция ϕH может быть уточнена для уменьшения или минимизации отклонения между направлением поля Y неединичных векторов и направлением градиента второй потенциальной функции ϕI. Кроме того, уточнение первой потенциальной функции ϕH может привести к корректировке функции величины для масштабирования третьего поля  единичных векторов в качестве средства общего лучшего подбора с приближением к функции величины и полю единичных векторов направлений.
единичных векторов в качестве средства общего лучшего подбора с приближением к функции величины и полю единичных векторов направлений.
[0062] При математической обработке для оптимизации с интегрирующими множителями первой потенциальной функции ϕH интегрирующий множитель для поля Y векторов на поверхности М является нулевой функцией u: М → R, так, что uY является градиентом потенциальной функции. Таким образом, желание решить уравнение 102 может быть перефразировано в понятиях нахождения интегрирующего множителя для  В этом отношении, функция u: М → R может быть найдена таким образом, что
В этом отношении, функция u: М → R может быть найдена таким образом, что  является градиентом потенциальной функции. На триангулированной поверхности Mh интегрирующие множители лежат в
является градиентом потенциальной функции. На триангулированной поверхности Mh интегрирующие множители лежат в  Таким образом, желательно найти
Таким образом, желательно найти  таким образом, что ƒY является градиентом потенциальной функции, что приводит к следующей задаче оптимизации для переменных m+n:
таким образом, что ƒY является градиентом потенциальной функции, что приводит к следующей задаче оптимизации для переменных m+n:

при условии ƒ>0, где:

[0063] IY является матрицей 3n на n, запись которой (3j+k, j) является (Yj)k для k ∈ {0,1,2} (k-ая координата j-го вектора Y), а в противном случае равно нулю. Как в описанной выше задаче минимизации ротора (Уравнение 107), ограничение положительности на ƒ для уравнения 111 может быть заменено ограничением замкнутой нижней границы, что приводит к выпуклой задаче разреженной оптимизации (не показано) на выпуклой области. Аналогично задаче минимизации ротора, если используется норма  задача оптимизации (Уравнение 111) может быть переформулирована в виде разреженной линейной программы (не показано). Однако уравнение 111 дает хорошие общие результаты.
задача оптимизации (Уравнение 111) может быть переформулирована в виде разреженной линейной программы (не показано). Однако уравнение 111 дает хорошие общие результаты.
[0064] Со ссылкой на ФИГ. 15 показан вид в перспективе третьей потенциальной функции ϕA композитного слоя 202, представляющей оптимизацию по углам (т.е. улучшенное выравнивание) контурных линий 310 третьей потенциальной функции ϕA со вторым полем X единичных векторов (ФИГ. 10). Как отмечено выше, второе поле X единичных векторов представляет направления волокон (например, как задано определением 226 углов волокон) в отношении опорного направления слоистого материала (представленного первым полем Х0 единичных векторов для композитного слоя 202). Выполнение оптимизации по углам для получения третьей потенциальной функции ϕA включает минимизацию только отклонения между направлением третьего поля  единичных векторов и направлением градиента потенциальной функции ϕ и игнорирует пространственное разнесение 316 между контурными линиями 310 (например, траекториями 314 волокон) потенциальной функции ϕ. Оптимизация по углам может быть выполнена на первой потенциальной функции ϕH (ФИГ. 13) или на второй потенциальной функции ϕI (ФИГ. 14). Если оптимизация по углам выполнена на первой потенциальной функции ϕH, то описанная выше оптимизация с интегрирующими множителями при необходимости может быть выполнена после оптимизации по углам.
единичных векторов и направлением градиента потенциальной функции ϕ и игнорирует пространственное разнесение 316 между контурными линиями 310 (например, траекториями 314 волокон) потенциальной функции ϕ. Оптимизация по углам может быть выполнена на первой потенциальной функции ϕH (ФИГ. 13) или на второй потенциальной функции ϕI (ФИГ. 14). Если оптимизация по углам выполнена на первой потенциальной функции ϕH, то описанная выше оптимизация с интегрирующими множителями при необходимости может быть выполнена после оптимизации по углам.
[0065] Математическая формулировка оптимизации по углам включает задание оптимизации целевой функции, которая непосредственно вводит штраф по углу отклонения от третьего поля  единичных векторов (ФИГ. 11), и включает в себя задание
единичных векторов (ФИГ. 11), и включает в себя задание  Слагаемыми целевой функции являются следующие:
Слагаемыми целевой функции являются следующие:

и

[0066] Если τ - угол по треугольнику (не показано) между третьим полем  единичных векторов и градиентом потенциальной функции ϕ, то целевая функция, представленная уравнением 113, измеряет разность между косинусом τ и агрегированным значением по треугольникам 220 (ФИГ. 8), а целевая функция, представленная уравнением 114, измеряет разность между синусом τ и нулевым агрегированным значением по треугольникам 220. Уравнение 113 содержит информацию об ориентации (например, градиент должен иметь такое же направление, что и Y, а не -Y), которая отсутствует в уравнении 114. Однако вблизи τ=0 уравнение 113 имеет горизонтальную касательную к каждому треугольнику 220, тогда как уравнение 114 может использовать sin(τ)≈τ для обеспечения хорошей сходимости. Таким образом, задача оптимизации выражена как:
единичных векторов и градиентом потенциальной функции ϕ, то целевая функция, представленная уравнением 113, измеряет разность между косинусом τ и агрегированным значением по треугольникам 220 (ФИГ. 8), а целевая функция, представленная уравнением 114, измеряет разность между синусом τ и нулевым агрегированным значением по треугольникам 220. Уравнение 113 содержит информацию об ориентации (например, градиент должен иметь такое же направление, что и Y, а не -Y), которая отсутствует в уравнении 114. Однако вблизи τ=0 уравнение 113 имеет горизонтальную касательную к каждому треугольнику 220, тогда как уравнение 114 может использовать sin(τ)≈τ для обеспечения хорошей сходимости. Таким образом, задача оптимизации выражена как:

при условии  для всех j.
для всех j.
[0067] Здесь количество переменных равно m (т.е. количеству точек в триангулированной поверхности 218). Верхний предел М+ включен для того, чтобы гарантировать отсутствие искусственного приведения уравнение 114 к малым значениям большими величинами градиента.
[0068] Вводят штрафную функцию, чтобы избежать действий с приведенными выше ограничениями (т.е.  для всех j). Пусть γ функция С2, определяемая следующим образом:
для всех j). Пусть γ функция С2, определяемая следующим образом:

и

[0069] При х=b-a-1, -log(a(b-х)) равен нулю, a -log(a(b-х)) стремится к бесконечности при изменении х от b-а-1 к b. Таким образом, если какой-либо хj находится между b-а-1 и b, то gpen будет большим. Составление каждого слагаемого с γ гарантирует, что gpen равен нулю, когда все xj далеки от b, при сохранении непрерывности С2.
[0070] Целевая функция неограниченной оптимизации, включая штрафную функцию, такова:

[0071] В уравнении 118  и начальное приближение для задачи оптимизации ϕ0 должны быть выбраны таким образом, что
и начальное приближение для задачи оптимизации ϕ0 должны быть выбраны таким образом, что  которое может быть обеспечено посредством масштабирования ϕ0 и корректировки М+. Производная функция gang может быть выражена аналитически в понятиях следующих трехкоординатных векторных полей, определенных в виде уравнений 119, 120 и 121:
которое может быть обеспечено посредством масштабирования ϕ0 и корректировки М+. Производная функция gang может быть выражена аналитически в понятиях следующих трехкоординатных векторных полей, определенных в виде уравнений 119, 120 и 121:



Учитывая Gcos, Gsin и Gpen в качестве векторов-строк:

[0072] Используя уравнение 122, могут быть выполнены оптимизации по углам на потенциальной функции ϕ (например, либо первой потенциальной функции ϕH - ФИГ. 13, либо второй потенциальной функции ϕI - ФИГ. 14) для формирования третьей потенциальной функции ϕA (ФИГ. 15), которая минимизирует отклонение между ориентацией третьего поля  единичных векторов (ФИГ. 11) и направлением градиента потенциальной функции ϕ. Оптимизации по углам могут быть проведены с использованием метода квазиньютона. Например, оптимизации по углам могут быть проведены с использованием алгоритма оптимизации, известного в данной области как L-BFGS-B, который основан на известном алгоритме Бройдена-Флетчера-Гольдфарба-Шанно (BFGS).
единичных векторов (ФИГ. 11) и направлением градиента потенциальной функции ϕ. Оптимизации по углам могут быть проведены с использованием метода квазиньютона. Например, оптимизации по углам могут быть проведены с использованием алгоритма оптимизации, известного в данной области как L-BFGS-B, который основан на известном алгоритме Бройдена-Флетчера-Гольдфарба-Шанно (BFGS).
[0073] Со ссылкой на ФИГ. 16 этап 114 способа 100 (ФИГ. 1) включает в себя выполнение нормализации потенциальной функции ϕ (например, первой потенциальной функции ϕH, второй потенциальной функции ϕI или третьей потенциальной функции ϕA) после нахождения потенциальной функции ϕ, которая соответствует углам волокон (например, ФИГ. 10 - определения 226 углов волокон) в пределах заданного порогового значения (например, в пределах 10°, в пределах 5° и т.д.). Процесс нормализации включает в себя применение масштабирующей функции к потенциальной функции ϕ таким образом, что контурные линии 310 в целом равномерно перераспределены по триангулированной поверхности 218, как показано на ФИГ. 16. Как описано ниже, процесс применения масштабирующей функции включает в себя определение множеств треугольников 220, каждый из которых соответственно пересекает одну из контурных линий 310, и определение распределения контурных линий 310 посредством задания постоянных значений потенциальной функции ϕ, которые изменяются с фиксированными интервалами между соседними парами контурных линий 310. Примером постоянных значений потенциальной функции ϕ с фиксированными интервалами является ϕ=1,0, ϕ=2,0, ϕ=3,0, ϕ=N.
[0073] Как отмечено выше, для композитного слоя 202, имеющего криволинейный контур и/или непостоянное распределение углов волокон, траектории 314 волокон могут сходиться и/или расходиться по мере их перемещения вдоль траекторий 314 волокон. Во время автоматизированной укладки композитного слоя 202 автоматизированная установка 400 для укладки волокон (AFPM - ФИГ. 17-19) либо укладывает ряды 206 композитной ленты 208 постоянной ширины, что приводит к появлению перекрытий 320 (например, ФИГ. 21-22) и/или зазоров 318 (ФИГ. 21-22) между соседними рядами 206, либо автоматизированная установка 400 для укладки волокон имеет возможность автоматического изменения ширины ленты посредством резки и/или добавления композитных жгутов (ФИГ. 17-19) вдоль внешних кромок ряда 206 для уменьшения или предотвращения перекрытий 320 и/или зазоров 318 между соседними рядами 206. На этапе 114 потенциальную функцию ϕ масштабируют таким образом, чтобы оптимизировать пространственное разнесение 316 между контурными линиями 310 значениями с постоянными интервалами. Таким образом, нормализация потенциальной функции ϕ приводит к получению контурных линий 310, которые разделены пространственным разнесением 316, которое совместимо с шириной 408 (ФИГ. 20) аппликаторной головки 406 (ФИГ. 19-20) автоматизированной установки 400 для укладки волокон, и уменьшению таким образом появления перекрытий 320 и/или зазоров 318 между соседними рядами 206. Во время процесса нормализации значения константы, определяющей данную контурную линию 310, может быть изменено в качестве средства изменения величины градиента, который, в свою очередь, изменяет пространственное разнесение 316 между контурными линиями 310 (например, траекториями 314 волокон).
[0074] В одном примере нормализация потенциальной функции ϕ может быть описана как нормализация с усреднением, при которой масштабирующую функцию применяют к потенциальной функции ϕ для корректировки значения потенциальной функции ϕ вдоль каждой контурной линии 310 таким образом, что инверсия величины градиента вдоль каждой контурной линии 310 в среднем эквивалентна ширине 408 (ФИГ. 20) аппликаторной головки 406 автоматизированной установки 400 для укладки волокон (ФИГ. 17-19). В раскрытии настоящего изобретения ширина 408 головки (ФИГ. 20) автоматизированной установки 400 для укладки волокон соответствует ширине ряда 206 композитной ленты 208, подлежащей укладке аппликаторной головкой 406 вдоль контурных линий 310 (например, траекторий 314 волокон). Ширина ряда 206 является шириной перед вышеупомянутыми, используемыми при необходимости, аавтоматизированными добавлением или резкой композитных жгутов 204 (ФИГ. 17-19) аппликаторной головкой 406 во время укладки ряда 206. Как описано более подробно ниже, ряд 206 может представлять собой композитную ленту 208, выполненную из множества смежных композитных жгутов (ФИГ. 17-19), которую аппликаторная головка 406 разбивает на столбцы и выравнивает перед наложением композитной ленты 208 на подложку 210, такую как укаладочное приспособление 212 или ранее нанесенный композитный слой 202.
[0076] Со ссылкой на ФИГ. 21 нормализация с усреднением регулирует пространственное разнесение 316 между контурными линиями 310 таким образом, что среднее расстояние между двумя соседними контурными линиями 310 как можно ближе к ширине 408 головки (т.е. ширине композитной ленты 208, нанесенной аппликаторной головкой 406) и эквивалентно или максимально эквивалентно для каждой пары контурных линий 310. Как отмечено выше, контурные линии 310 разнесены с постоянными значениями фиксированных интервалов. Результат нормализации с усреднением заключается в том, что одна или более пар соседних рядов 206 имеют некоторое перекрытие 320 и некоторые зазоры 318 в одном или более местоположениях вдоль длины пары соседних контурных линий 310, за исключением случаев, когда пара соседних рядов 206 точно параллельна друг другу вдоль всей своей длины, и в этом случае зазоры 318 или перекрытия 320 не вознакают. На ФИГ. 21 пара рядов 206 расположены с перекрытием вдоль левой части, с зазором вдоль правой части и без перекрытия и без зазора приблизительно посередине показанного отерзка рядов 206. В некоторых примерах нормализация с усреднением для потенциальной функции ϕ может быть такой, что для каждой соседней пары рядов 206 максимальная ширина перекрытия 320 (т.е. измеряемая перпендикулярно одной из контурных линий 310) на одном конце пары рядов 206 эквивалентна максимальной ширине зазора 318 на противоположном конце одних и тех же пар рядов 206. В других примерах (например, ФИГ. 21) нормализация с усреднением для потенциальной функции может быть такой, что общая площадь перекрытия 320 пары рядов 206 (вид в перспективе, если смотреть сверху вниз) эквивалентна общей площади зазора 318 между одной и той же парой рядов 206.
[0077] Со ссылкой на ФИГ. 22, в другом примере, нормализация потенциальной функции ϕ может быть описана как нормализация по ширине головки, при которой к потенциальной функции ϕ применяют масштабирующую функцию для корректировки значения потенциальной функции ϕ вдоль каждой контурной линии 310 таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии 310 не больше, чем ширина 408 головки (ФИГ. 20) аппликаторной головки 406 автоматизированной установки 400 для укладки волокон (ФИГ. 17-19). В этом отношении, нормализация по ширине головки регулирует пространственное разнесение 316 между контурными линиями 310 таким образом, что максимальное расстояние между двумя соседними контурными линиями 310 эквивалентно ширине 408 головки, и является одинаковым для каждой пары контурных линий 310 которые, как отмечено выше, разнесены с постоянными значениями фиксированных интервалов. Результат нормализации по ширине головки заключается в том, что два ряда 206 в каждой паре соседних рядов 206 касаются или перекрывают 320 друг друга вдоль длины контурных линий 310 без зазоров 318 между каждой парой соседних рядов 206. В этом отношении, каждая пара соседних рядов 206 точно касаются друг друга (без перекрытия) в тех местах, где контурные линии 310 (т.е. траектории 314 волокон) максимально удалены друг от друга, без каких-либо зазоров между каждой парой соседних рядов 206. Такая компоновка обеспечивает оптимальное использование автоматизированной установки для укладки волокон и максимизирует выход, поскольку полная ширина ряда может быть использована в тех местах, где контурные линии 310 максимально удалены друг от друга.
[0078] Математическая формулировка нормализации потенциальной функции ϕ включает нахождение функцкции нормализации h: R → R так, что контурные линии 310 для h о ϕ (ФИГ. 16) обеспечивают построение модели траекторий 314 волокон, которая является наилучшей из возможных для ручного нанесения. В этом отношении, ниже описаны два подхода, включая первый подход, описывающий отмеченную выше нормализацию с усреднением (ФИГ. 17), а затем второй подход, описывающий отмеченную выше нормализацию по ширине головки (ФИГ. 22).
[0079] Ключевое наблюдение состоит в том, что для любой контурной траектории ϕ=с на аппроксимации Mh триангулированной поверхности, которая не проходит через узел, есть максимально длинный открытый интервал Ic=(с-ε0, с+ε1) так, что для любого c' ∈ Ic, контурная траектория ϕ=с0 имеет такие же симплексные касательные направления, что и ϕ=с. Кроме того, верхний и нижний пределы Ic должны находиться в образованной узлами области потенциальной функции ϕ, которая является конечным множеством Ф, представленным как:

[0080] Если  является упорядочением Ф, то с точки зрения касательных и, таким образом, градиентов, имеется конечное число контурных линий 310, по одной для каждого открытого интервала
является упорядочением Ф, то с точки зрения касательных и, таким образом, градиентов, имеется конечное число контурных линий 310, по одной для каждого открытого интервала 
[0081] При первом подходе к нормализации с усреднением может быть предпринята попытка получения универсальной перспективы (generalist perspective) функции h, которая равномерно распределяет контурные линии 310 потенциальной функции ϕ по поверхности. Пусть ak является средней точкой Ik и пусть Tk является множеством треугольников 220, которые пересекают контур ϕ=ak. Равномерное распределение контурных линий 310 может быть получено путем изменения величины градиентов вдоль контурных линий 310 как можно ближе к нулю. Таким образом, желательно сделать величины градиентов вдоль контурных линий 310 как можно ближе к некоторой постоянной. Если постоянная равна единице, это может быть выражено для контурных траектории ϕ=с с  в качестве следующей задачи оптимизации:
в качестве следующей задачи оптимизации:

которое имеет решение:

[0082] Имеются такие интервалы Ik, что средние величины градиента вдоль контурной линии 310 являются одинаковыми для всех контурных линий ϕ=с с , и имеются числа mk, которые масштабируют эти величины градиента с получением значений, как можно ближе к единице. По этим данным можно построить кусочно-линейную нормирующую функцию h для нормализации с усреднением для потенциальной функции ϕ, как показано на ФИГ. 21. А именно, h является кусочно-линейной функцией с h(ϕi0)=0, точки излома кривой при  и h'(ak)=mk.
и h'(ak)=mk.
[0083] Ниже описан второй подход к нормализации потенциальной функции ϕ, который называется нормализацией по ширине головки (ФИГ. 22). Как отмечено выше, результат нормализации по ширине головки заключается в том, что два ряда 206 в каждой паре соседних рядов 206 перекрывают друг друга вдоль длины контурных линий 310, по меньшей мере с одним местоположением вдоль длины, в котором края этих двух рядов 206 точно касаются друг друга без зазоров между каждой парой соседних рядов 206. Программа укладки для автоматизированной установки 400 укладки волокон может требовать, чтобы два ряда 206 в каждой соседней паре были разделены не более, чем на ширину 408 аппликаторной головки 406 автоматизированной установки 400 для укладки волокон. Указанный подход к нормализации по ширине головки моделирует это требование непрерывно посредством использования следующих наклонов в кусочно-линейной модели, описанной выше:

где  - ширина 408 (ФИГ. 20) аппликаторной головки 406 автоматизированной установки 400 для укладки волокон (ФИГ. 20). Уравнение 126 показывает, что минимальная величина градиента вдоль контурной линии 310 установлена на инверсию ширины 408 аппликаторной головки 406.
- ширина 408 (ФИГ. 20) аппликаторной головки 406 автоматизированной установки 400 для укладки волокон (ФИГ. 20). Уравнение 126 показывает, что минимальная величина градиента вдоль контурной линии 310 установлена на инверсию ширины 408 аппликаторной головки 406.
[0084] Со ссылкой на ФИГ. 19-22, после нормализации потенциальной функции ϕ, этап 116 способа 100 (ФИГ. 1) включает в себя использование контурных линий 310 нормализованной потенциальной функции (h o ϕ, например, ФИГ. 16) в качестве траекторий 314 волокон для изготовления композитного слоя 202 посредством укладки рядов 206 композитной ленты 208 вдоль траекторий 314 волокон. Как отмечено выше, в некоторых примерах каждый ряд 206 может содержать множество смежных композитных жгутов 204 (ФИГ. 17-19) с контактом кромка к кромке. Однако в других примерах каждый ряд 206 может содержать один композитный жгут 204. Пространственное разнесение 316 (т.е. с фиксированными интервалами) между траекториями 314 волокон может быть выбрано таким образом, что наибольшее расстояние между соседними парами траекторий 314 волокон эквивалентно максимальной ширине ряда 206 (например, композитной ленты 208), которую следует использовать для укладки композитного слоя 202. Если требуется минимальное перекрытие 320 соседних рядов 206 или его отсутствие, например, по коструктивным причинам, первая оценка ширины ряда (например, ширины композитной ленты) или количество композитных жгутов 204 может быть получена или получено на основании пространственного разнесения 316 между соседними траекториями 314 волокон. Если пространственное разнесение 316 между соседними траекториями 314 волокон меньше, чем максимальная ширина ряда (взаимозаменяемо называемая в настоящем документе шириной 408 головки), который может быть нанесен аппликаторной головкой 406, то ширина ряда будет нуждаться в корректировке. Например, если пространственное разнесение 316 между соседними траекториями 314 волокон составляет половину максимальной ширины ряда, автоматизированная установка 400 для укладки волокон может быть отрегулирована или запрограммирована на нанесение композитной ленты 208 с шириной ленты, составляющей половину максимальной ширины ряда. Математическая формулировка для определения ширины ряда является следующей: если  - ширина 408 головки, и
- ширина 408 головки, и  - ширина ряда, то можно сказать, что
- ширина ряда, то можно сказать, что  или, иными словами,
или, иными словами,  , которая является постоянной вдоль контурной линии. Так, если минимальное значение ||∇ϕ|| равно 1, то ширина ряда равна ширине 408 головки, а в противном случае ширина ряда может быть только меньше. Автоматизированная установка 400 для укладки волокон может быть запрограммирована на резку композитных жгутов 204 вдоль внешних кромок рядов 206 (т.е. композитной ленты 208) для предотвращения появления перекрытий 320 между соседними рядами 206. В этом отношении, способ 100 может включать корректировку ширины ряда, чтобы он был меньше, чем пространственное разнесение 316 между соседними траекториями 314 волокон (т.е. контурными линиями 310) в качестве средства, чтобы избежать перекрытия соседних рядов 206 во время укладки. Ширина ряда может быть откорректирована перед укладкой рядов 206 путем первоначального выбора количества композитных жгутов 204 (ФИГ. 19) для подачи на аппликаторную головку 406. Альтернативно или дополнительно автоматизированная установка 400 для укладки волокон может быть запрограммирована на регулировку ширины ряда посредством добавления или резки композитных жгутов 204 с боковых краев ряда 206 во время укладки, с тем чтобы избежать перекрытия соседних рядов 206.
, которая является постоянной вдоль контурной линии. Так, если минимальное значение ||∇ϕ|| равно 1, то ширина ряда равна ширине 408 головки, а в противном случае ширина ряда может быть только меньше. Автоматизированная установка 400 для укладки волокон может быть запрограммирована на резку композитных жгутов 204 вдоль внешних кромок рядов 206 (т.е. композитной ленты 208) для предотвращения появления перекрытий 320 между соседними рядами 206. В этом отношении, способ 100 может включать корректировку ширины ряда, чтобы он был меньше, чем пространственное разнесение 316 между соседними траекториями 314 волокон (т.е. контурными линиями 310) в качестве средства, чтобы избежать перекрытия соседних рядов 206 во время укладки. Ширина ряда может быть откорректирована перед укладкой рядов 206 путем первоначального выбора количества композитных жгутов 204 (ФИГ. 19) для подачи на аппликаторную головку 406. Альтернативно или дополнительно автоматизированная установка 400 для укладки волокон может быть запрограммирована на регулировку ширины ряда посредством добавления или резки композитных жгутов 204 с боковых краев ряда 206 во время укладки, с тем чтобы избежать перекрытия соседних рядов 206.
[0085] На ФИГ. 17 приведен вид сбоку примера автоматизированной установки 400 для укладки волокон, запрограммированной, чтобы следовать по траекториям 314 волокон при укладке рядов 206 композитной ленты 208 на укаладочное приспособление 212. На ФИГ. 18 приведен вид в перспективе автоматизированной установки 400 для укладки волокон, выполняющей укладку рядов 206 композитной ленты 208 на укаладочное приспособление 212 сложной формы, с показом аппликаторной головки 406, проходящей по траекториям 314 волокон, определенным раскрытым в настоящем документе способом 100. В раскрытии настоящего изобретения траектория 314 волокна также может быть названа траекторией средней линии или траекторией головки и может быть описан путь, по которому проходит средняя линия 410 (ФИГ. 20) аппликаторной головки 406 (т.е. средняя линия ряда) для укладки рядов 206 композитной ленты 208 на подложку 210. Подложкой 210 может быть укаладочное приспособление 212 (например, ФИГ. 17-20), ранее уложенный композитный слой 202 или поверхность другого типа. Автоматизированная установка 400 для укладки волокон по ФИГ. 19-20 может включать в себя основание 402 и один или более шарнирных манипуляторов 404, один из которых может быть соединен с возможностью поворота с основанием 402. Аппликаторная головка 406 может быть установлена на конце шарнирного манипулятора 404.
[0086] Следует отметить, что реализация раскрытого в настоящем документе способа 100 не ограничена определением траекторий волокон для укладки рядов 206 композиционного материала (например, композитной ленты 208) на неподвижные укаладочные приспособления 212. Например, раскрытый в настоящем документе способ 100 также может быть реализован для укладки рядов 206 на подвижное укаладочное приспособление (не показано), такое как вращающаяся оправка. Кроме того, раскрытый в настоящем документе способ 100 не ограничен реализацией для автоматизированной установки 400 для укладки волокон, имеющей шарнирные манипуляторы 404, и может также быть реализован для других конфигураций оборудования автоматизированной укладки, такого как портальный робот верхнего расположения (не показано), выполненный с возможностью поддержки аппликаторной головки 406 для укладки рядов 206. Кроме того, раскрытый в настоящем документе способ 100 также может быть реализован для определения траекторий 314 волокон, с тем чтобы способствовать ручной укладке рядов 206 техническим специалистом вместо использования автоматизированной установки 400 для укладки волокон. Например, технический специалист может последовательно укладывать множество рядов 206 композитной ленты 208 с ручным выравниванием средней линии (не показано) каждого ряда 206 с соответствующей траекторией 314 волокна. Траектории 314 волокон могут быть выполнены (например, отмечены) на подложке 210 с использованием любого количества средств, которые позволяют техническому специалисту визуально выровнять среднюю линию каждого ряда 206 с траекторией 314 волокна, включая физическую маркировку траекторий 314 волокон непосредственно на подложке 210, проецировать траектории 314 волокон на подложку 210 с использованием оптического проекционного устройства (не показано), такого как лазерный луч, или любым другим способом. Преимущественно, для ручной укладки композитного слоя 202, когда ряд 206 композиционного материала (например, композитной ленты 208) укладывают по траектории 314 волокна в виде одного непрерывного куска (т.е. без сращивания), раскрытый в настоящем документе способ 100 позволяет прогнозировать местоположение морщин (не показано) в ряду 206 в областях композитного слоя 202, где сходимость траекторий 314 волокон является высокой. В альтернативном варианте реализации изобретения раскрытый в настоящем документе способ 100 может способствовать определению невозмозможности укладки ряда 206 вдоль траектории 314 волокна без возникновения морщин в ряду 206.
[0087] На ФИГ. 19 приведен вид в перспективе аппликаторной головки 406 автоматизированной установки 400 для укладки волокон, наносящей ряд 206 композитной ленты 208 на укаладочное приспособление 212 с образованием композитного слоя 202 композитной укладки. На ФИГ. 20 приведен вид сверху аппликаторной головки 406 автоматизированной установки 400 для укладки волокон с показом средней линии 410 аппликаторной головки 406, которую сохраняют выровненной с траекторией 314 волокна, когда аппликаторная головка 406 выполняет укладку композитной ленты 208 на укаладочное приспособление 212. Аппликаторная головка 406 может иметь коллиматор 412 для перенаправления и выравнивания множества композитных жгутов 204 с образованием композитной ленты 208, зажим 414 для резки композитных жгутов 204, один или более подающих роликов 416 для подачи композитных жгутов 204 и уплотняющий ролик 418 для прижатия композитной ленты 208 (например, множества композитных жгутов 204) к подложке 210 (например, поверхности укаладочного приспособления 212 или ранее уложенному композитному слою 202). Автоматизированная установка 400 для укладки волокон может быть запрограммирована на укладку множества композитных слоев 202 друг на друга согласно заданной последовательности укладки в стопу с образованием композитной укладки. Композитная укладка может быть впоследствии подвергнута обработке (например, с вакуумным мешком, дегазации, консолидации и т.д.) перед отверждением композитной укладки с образованием слоистого композиционного материала 200 (ФИГ. 2-3).
[0088] Существуют некоторые конфигурации поверхности, для которых возможный подбор и/или нормализация могут быть неудачны, если не будут приняты дополнительные меры. Одним из примеров является цилиндр круглого сечения (не показано), имеющий траектории волокон (т.е. контурные линии), каждая из которых ориентирована в осевом направлении цилиндра. Если имеется по трактории волокна каждые 30°, и трактория волокна в местоположении 0° имеет значение 0 и увеличивается на 1 при обходе по окружности цилиндра, то трактория волокна со значением 12 будет расположена в местоположении 0° там, где уже существует трактория волокна со значением 0 для потенциальной функции ϕ, что приводит к скачку или нарушению непрерывности вследствие двух разных значений (12 и 0) в местоположении 0°. Одно из решений для примера с цилиндром состоит в создании одной траектории волокна интегрированием ориентации волокон по цилиндрической поверхности, резки поверхности вдоль указанной одной траектории волокна с последующим выполнением вышеописанных возможных этапов подбора.
[0089] На каждой из фигур черетежей ФИГ. 23-24 приведен пример конфигурации поверхности, для которых вышеописанный возможный этап подбора и/или этап нормализации также может быть неудачен, если не будут приняты дополнительные меры. На каждой из ФИГ. 23-24 показана неодносвязная поверхность, имеющая отверстие 232, которое вызывает несвязанность контурной линии 310 для потенциальной функции ϕ со значением 2. Нормализация приведет к нахождению единственного значения масштабирования для обоих компонентов или сегментов контурной линии 310 со значением 2. Однако для достижения наилучших результатов нужны два значения масштабирования, по одному для каждого компонента контурной линии 310. Несвязанная контурная линия также может возникать в поверхности (не показано), имеющей вогнутую часть вдоль границы поверхности. Например, вогнутая часть (не показано) в границе поверхности может вызвать разрыв в контурной линии, что приведет к образованию двух или более компонентов несвязанной контурной линии. Обычно поверхность для укладки при изготовлении (например, укаладочного приспособления) крупнее композитной детали. Если какая-либо часть ряда, которая проходит по несвязанной контурной линии, попадает в пределы поверхности для укладки при изготовлении, то указанные два компонента контурной линии должны быть подвергнуты обработке (т.е. нормализованы или разнесены друг от друга) как одно целое, так что можно уложить (например, с использованием автоматизированной установки для укладки волокон) один непрерывный ряд, в котором множество жгутов (ФИГ. 19), которые составляют ряд, являются непрерывными. Если какая-либо часть ряда, которая проходит по несвязанной контурной линии, выходит за пределы поверхности для укладки при изготовлении, то указанные два компонента контурной линии могут быть обработаны (т.е. нормализованы или разнесены друг от друга) независимо. Однако в примере с отверстием в композитной детали (например, ФИГ. 23-24) независимая обработка (например, нормализация или разнесение) двух компонентов контурной линии может быть нежелательной, поскольку эти компоненты должны быть выровнены так, что ряды на противоположных сторонах отверстия имеют желаемое пространственное разнесение. Кроме того, может быть нежелательным временный подъем аппликаторной головки (ФИГ. 19) автоматизированной установки для укладки волокон с поверхности для укладки при изготовлении, когда аппликаторная головка перемещается через отверстие в композитной детали, что требует гладкой траектории волокна, в которой компоненты контурной линии на противоположных сторонах отверстия выровнены.
[0090] На ФИГ. 24 проиллюстрировано решение для несвязанной контурной линии 310 (т.е. траектории 314 волокна) посредством разделения поверхности на множество областей 312 вдоль контурных линий 310 потенциальной функции ϕ таким образом, что все контурные линии 310 внутри каждой области 312 соединены. Поверхность на ФИГ. 24 разделяют с использованием траекторий 314 волокон (т.е. контурных линий 310), которые являются касательными к отверстию 232 на верхней стороне и нижней стороне отверстия 232, что приводит к появлению четырех различных областей 312, соответственно представленных четырьмя различными типами штриховок, показанных на ФИГ. 24. Нормализация потенциальной функции ϕ может быть осуществлена по областям. Однако в случае, когда два компонента контурной линии 310 (т.е. траектории 314 волокна) расположены достаточно близко друг к другу (т.е. конец к концу), то может быть нежелательным рассматривать указанные компоненты как две отдельные контурные линии. Например, было бы наиболее желательным изменить положение контурной линии ϕ=2 по ФИГ. 23, так чтобы она занимала положение пунктирной линии 310 и сохранить идентификацию контурной линии ϕ=2 по всему отверстию 232.
[0091] Выполнение дополнительного этапа сглаживания может устранить проблему нарушения непрерывности или рассоединения в одной или более траекториях 314 волокон (т.е. контурных линиях 310) по поверхности. Сглаживание может быть описано как способствование тому, чтобы изменение величины градиента было минимально возможным. Сглаживание может включать минимизацию вариации величины градиента потенциальной функции ϕ. Потенциальная функция ϕ, для которой может быть осуществлено сглаживание, может быть вышеописанной первой потенциальной функцией ϕH, второй потенциальной функцией ϕI (оптимизация с интегрирующими множителями) или третьей потенциальной функцией ϕA (оптимизация по углам).
[0092] Математическая формулировка сглаживания может быть введена напоминанием о том, что задача определения наилучшего решения уравнения 102 содержит два компонента: (1) определение потенциальной функции ϕ, контурные линии 310 (т.е. траектории 314 волокна) которой соответствуют направлениям волокон (т.е. углов 306 волокон - ФИГ. 10А), заданным в определении 226 углов волокон для композитного слоя 202 и, (2) определение оптимального пространственного разнесения 316 между траекториями 314 волокон в качестве средства улучшения технологичности композитного слоя 202. Если существует потенциальная функция ϕ, градиент которой соответствует необходимым направлениям поля векторов (т.е. определению 226 углов волокон) и множества ϕ-1(с) соединены, тогда можно определить оптимальное пространственное разнесение 316 траекторий волокон (например, ФИГ. 16) вычисления соответствующей одномерной функции h, как в уравнении 103. В этом случае, вышеупомянутые два компонента для нахождения решений уравнения 102 могут быть подобраны независимо. В альтернативном варианте реализации изобретения, если существует несвязанное множество ϕ-1(с), может отсутствовать возможность скорректировать нежелательное поведение величины градиента с одномерной масштабирующей функцией. Например, из ФИГ. 23 видно, что контурная линия ϕ=2 является несвязанной в пространстве вложения. Невозможно повторно выровнять сегменты несвязанной контурной линии ϕ=2 с использованием масштабирующей функции h: R → R.
[0093] Однако, как отмечено выше, проблема несвязанных или прерывистых контурных линий 310 может быть решена посредством разделения доменной области (т.е. поверхности) на частные области 312, в которых ϕ-1(c) является связанной, как показано на ФИГ. 24 и описано выше, и вычисления масштабирующих функций для каждой частной области 312. В качестве альтернативы разделению доменной области, проблема несвязанных контурных линий 310 может быть смягчена в некоторых случаях путем введения слагаемого, сглаживающего величину градиента, в потенциальные целевые функции оптимизации подбора, включая оптимизацию с интегрирующими множителями или оптимизацию по углам. По существу, имеется запрос на соответствие подборов данным направлениям поля векторов (т.е. определению 226 углов волокон) и получение величины градиента, которые имеют минимально возможное изменение. На ФИГ. 23 величина показанной потенциальной функции ϕ изменяется больше, чем величина потенциала с равномерно разнесенными контурами таким образом, что с соответствующим сглаживающим членом подборы будут перемещены в сторону решения с равномерным разнесением.
[0094] Целью сглаживания потенциальной функции ϕ является ослабление вариации в  Может быть определен оператор
Может быть определен оператор  на
на  который измеряет изменение в постоянной симплексной функции по соседним симплексным элементам. Пусть mk для k ∈ {0,1,2} является срединной точкой k-ого края треугольника 220 tj, и пусть cj является центром тяжести для tj. Кроме того, пусть sk является треугольником 220, образованным mk+1+ mk+2 и cj, с использованием сравнения по модулю 3 согласно модулярной арифметике. Необходимый оператор на tj определяют как среднее операторов градиента на треугольниках 220 s0, s1 и s2, где значение функции в
который измеряет изменение в постоянной симплексной функции по соседним симплексным элементам. Пусть mk для k ∈ {0,1,2} является срединной точкой k-ого края треугольника 220 tj, и пусть cj является центром тяжести для tj. Кроме того, пусть sk является треугольником 220, образованным mk+1+ mk+2 и cj, с использованием сравнения по модулю 3 согласно модулярной арифметике. Необходимый оператор на tj определяют как среднее операторов градиента на треугольниках 220 s0, s1 и s2, где значение функции в  на mk является ее значением на треугольнике 220 с примыканием к tj через k-ый край. Таким образом, оператор может быть выражен как:
на mk является ее значением на треугольнике 220 с примыканием к tj через k-ый край. Таким образом, оператор может быть выражен как:

[0095] В уравнении 127  является оператором градиента, ограниченным треугольником sk. Эти формулы (т.е. уравнение 127 для каждого треугольника j) могут быть собраны в одной разреженной матрице 2n на n. Имея под рукой оператора
является оператором градиента, ограниченным треугольником sk. Эти формулы (т.е. уравнение 127 для каждого треугольника j) могут быть собраны в одной разреженной матрице 2n на n. Имея под рукой оператора следующее определение сглаживающего члена gsmo может быть добавлено в качестве слагаемого в целевые функции в уравнении 111 или уравнении 115:
следующее определение сглаживающего члена gsmo может быть добавлено в качестве слагаемого в целевые функции в уравнении 111 или уравнении 115:


где * обозначает покоординатное умножение, а
J является матрицей n х 2n с

[0096] Умножение на J на левой стороне уравнения 130 добавляет последовательные четные пары строк. Производная функция является следующей:

где ∇ϕ*∇ является умножение ряда ∇ на соответствующие координаты ∇ϕ. Приближение к отмеченным выше двум компонентам определения решений уравнения 102 может быть получено независимо, если произошло разделение доменных областей, хотя на практике часто достаточно применения сглаживающей эвристики.
[0097] На ФИГ. 25 приведен вид в перспективе летательного аппарата 250, который может включать в себя одну или более композитных структур 252, которые могут быть изготовлены в процессе, реализующем раскрытые в настоящем документе систему 500 и способ 100 определения траекторий 314 волокон для укладки композитных слоев 202 композитной структуры 252. Например, композитные структуры 252 могут включать в себя участок фюзеляжа 254, компонент крыла 260, горизонтальное хвостовое оперение 262, вертикальное хвостовое оперение 264 или любую из множества других конструкций летательных аппаратов. На ФИГ. 26 показан пример композитного слоя 202 композитной обшивки 256 фюзеляжа летательного аппарата 250. Определение 214 поверхности обшивки 256 фюзеляжа является неодносвязным вследствие вырезов 258 для дверей в обшивке 256 фюзеляжа и таким образом может потребовать сглаживающего подбора или разделения на доменные области, как описано выше. На ФИГ. 26 показаны траектории 314 волокон, определенные раскрытым в настоящем документе способом 100 для определения постоянного угла волокон величиной 45°, заданного для одного или более из композитных слоев 202 обшивки 256 фюзеляжа.
[0098] Со ссылкой на ФИГ. 27, описанный выше способ 100, в целом или частично, может быть осуществлен в компьютерореализуемом процессе, например, в процессорной системе 500 или другой подходящей компьютерной системе. Процессорная система 500 может исполнять компьютерочитаемые программные инструкции 524. Компьютерочитаемые программные инструкции 524 могут быть предоставлены или загружены в процессорную систему 500 для осуществления одной или более описанных выше операций или этапов. В неограничивающем примере процессорная система 500 и/или компьютерочитаемые программные инструкции 524 могут способствовать определению направления и пространственного разнесения 316 траекторий 314 волокон для композитного слоя 202 при заданных определении 214 поверхности и определении 226 углов волокон композитного слоя 202.
[0099] Структурная схема по ФИГ. 27 является иллюстрацией процессорной системы 500 в предпочтительном варианте реализации изобретения для определения направления и пространственного разнесения 316 траекторий 314 волокон. Процессорная система 500 может включать в себя канал 502 связи (например, линии передачи данных) для связи одного или более компонентов, чтобы способствовать передаче данных между такими компонентами. Канал 502 связи может содержать одну или более шин данных или любой другой подходящий канал связи, который способствует передаче данных между компонентами и устройствами процессорной системы 500. В неограничивающем варианте реализации изобретения компоненты могут включать в себя одно или более из следующего: процессора 504, запоминающего устройства 506, энергонезависимого устройства 508 для хранения, устройства 512 связи, устройства 510 ввода/вывода, устройства 514 отображения, аппроксиматора 528 поверхности, определителя 530 векторного поля, минимизатора 532 ротора, определителя 534 потенциальной функции, распределителя 536 контурных линий, включая нормализатор 538 потенциальной функции и определитель 540 программы укладки.
[00100] Аппроксиматор 528 поверхности выполнен с возможностью формирования аппроксимации Mh поверхности для композитного слоя 202, содержащей триангулированную поверхность 218 (ФИГ. 8). Триангулированная поверхность 218 включает в себя сетку треугольников 220, представляющую определение 214 поверхности. Как отмечено выше, композитный слой 202 имеет по меньшей мере одну из следующих характеристик: определение 214 поверхности (ФИГ. 6) имеет неплоский контур 222 и/или определение 226 углов волокон (ФИГ. 7) содержит непостоянные углы 230 волокон. Аппроксиматор 528 поверхности может включать в себя генератор сетки (не показано) для формирования триангулированной поверхности 218 композитного слоя 202. Аппроксиматор 528 поверхности может формировать триангулированную поверхность 218 на основании определения 214 поверхности композитного слоя 202, как может быть представлено моделью компьютерного моделирования (не показано) для композитного слоя 202. В качестве альтернативы пользователь может импортировать триангулированную поверхность 218 композитного слоя 202 посредством использования устройства 510 ввода/вывода.
[00101] Определитель 530 векторного поля выполнен с возможностью определения на триангулированной поверхности 218 первого поля Х0 единичных векторов (ФИГ. 9), устанавливающего направление 302 величиной 0 градусов для каждого из треугольников 220. Как отмечено выше, направление 302 величиной 0 градусов является направлением, относительно которого измеряют углы волокон. В некоторых примерах определитель 530 векторного поля может устанавливать первое поле Х0 единичных векторов посредством проецирования розеточного вектора физического пространства на каждую триангулированную поверхность 218, как показано на ФИГ. 9А. В альтернативном варианте реализации изобретения, как отмечено выше, определитель 530 векторного поля может устанавливать первое поле Х0 единичных векторов посредством использования поля векторов градиента (не показано) функции, определенного на указанной поверхности, или определитель 530 векторного поля может устанавливать первое поле Х0 единичных векторов посредством оценки функции, которая описывает направление поля векторов как функцию координат поверхности.
[00102] Определитель 530 векторного поля выполнен с возможностью определения на триангулированной поверхности 218 второго поля X единичных векторов (ФИГ. 10) посредством поворота, на углы волокон, заданные (например, инженером-проектировщиком), первого поля Х0 единичных векторов вокруг нормалей 304 к поверхности, соответственно соотнесенных с треугольниками 220. Например, на ФИГ. 10A проиллюстрирован первый единичный вектор, повернутый на угол волокна, заданный для местоположения нормали 304 к поверхности в треугольнике 220. Определитель 530 векторного поля может устанавливать второе поле X единичных векторов на основании определения 226 углов волокон, содержащего постоянные углы слоя (например, ФИГ. 4), или на основании определения 226 углов волокон, содержащего непостоянные углы слоя (например, ФИГ. 5). В некоторых примерах определитель 530 векторного поля может устанавливать второе поле X единичных векторов на основании определения 226 углов волокон, получаемого исходя из функции координат поверхности (не показано) триангулированной поверхности 218.
[00103] Определитель 530 векторного поля также выполнен с возможностью определения направления градиента потенциальной функции ϕ, контурные линии 310 которого соответствуют направлениям волокон (например, углам волокон), как определено определением 226 углов волокон, заданным для композитного слоя 202, и опорным направлением слоистого материала, представленным первым полем Х0 единичных векторов. В этом отношении, определитель 530 векторного поля выполнен с возможностью определения на триангулированной поверхности 218 третьего поля  единичных векторов (ФИГ. 11), представляющего направление градиента потенциальной функции ϕ, посредством поворота второго поля X единичных векторов на 90° вокруг соответствующей нормали 304 к поверхности. Например, на ФИГ. 11А показан поворот второго единичного вектора на 90° вокруг нормали 304 к поверхности треугольника 220.
единичных векторов (ФИГ. 11), представляющего направление градиента потенциальной функции ϕ, посредством поворота второго поля X единичных векторов на 90° вокруг соответствующей нормали 304 к поверхности. Например, на ФИГ. 11А показан поворот второго единичного вектора на 90° вокруг нормали 304 к поверхности треугольника 220.
[00104] Минимизатор 532 ротора выполнен с возможностью определения функции ƒ величины для масштабирования третьего поля единичных векторов по триангулированной поверхности 218 с созданием поля Y неединичных векторов (ФИГ. 12) для обеспечения возможности подбора потенциальной функции ϕ с приближением ко второму полю X единичных векторов, посредством минимизации ротора поля Y неединичньгх векторов. На ФИГ. 12А показан неединичный вектор Y одного из треугольников 220, отмасштабированный согласно функции ƒ величины, как описано выше.
[00105] Определитель 534 потенциальной функции выполнен с возможностью определения первой потенциальной функции ϕH композитного слоя 202. Первая потенциальная функция ϕH (ФИГ. 13) имеет контурные линии 310, которые представляют траектории 314 волокон, аппроксимирующие распределение углов волокон с соответствующим приближением ко второму полю X единичных векторов. Как описано выше, первую потенциальную функцию ϕH определяют выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции ϕH наилучшим образом аппроксимируют направление и функцию ƒ величины поля Y неединичных векторов на триангулированной поверхности 218. Как также описано выше, определитель 534 потенциальной функции может при необходимости выполнять оптимизацию с интегрирующими множителями для уточнения первой потенциальной функции ϕH с получением второй потенциальной функции ϕI (ФИГ. 14), которая обеспечивает улучшенное выравнивание контурных линий 310 со вторым полем X единичных векторов. В этом отношении, определитель 534 потенциальной функции может минимизировать отклонение между направлением поля Y неединичных векторов и направлением градиента второй потенциальной функции ϕI, выполняя также корректировку функции ƒ величины, масштабирующей третье поле  единичных векторов. Определитель 534 потенциальной функции может также при необходимости произвести уточнение либо первой потенциальной функции ϕH, либо второй потенциальной функции ϕI с использованием оптимизации по углам, как описано выше, для определения третьей потенциальной функции ϕА (ФИГ. 15), которая улучшает выравнивание контурных линий 310 со вторым полем X единичных векторов посредством минимизации только отклонения между направлением третьего поля
единичных векторов. Определитель 534 потенциальной функции может также при необходимости произвести уточнение либо первой потенциальной функции ϕH, либо второй потенциальной функции ϕI с использованием оптимизации по углам, как описано выше, для определения третьей потенциальной функции ϕА (ФИГ. 15), которая улучшает выравнивание контурных линий 310 со вторым полем X единичных векторов посредством минимизации только отклонения между направлением третьего поля  единичных векторов и направлением градиента потенциальной функции ϕ, и без учета масштабирующей функции ƒ инверсия которой определяет пространственное разнесение 316 между контурными линиями 310 потенциальной функции ϕ.
единичных векторов и направлением градиента потенциальной функции ϕ, и без учета масштабирующей функции ƒ инверсия которой определяет пространственное разнесение 316 между контурными линиями 310 потенциальной функции ϕ.
[00106] Распределитель 536 контурных линий выполнен с возможностью распределения контурных линий 310 потенциальной функции ϕ (например, первой потенциальной функции ϕH, второй потенциальной функции ϕI или третьей потенциальной функции ϕА) по триангулированной поверхности 218 таким образом, что контурные линии 310 в целом равномерно разнесены и могут быть использованы в качестве траекторий 314 волокон для укладки рядов 206 композитной ленты 208 с образованием композитного слоя 202. В одном варианте реализации распределитель 536 контурных линий может содержать нормализатор 538 потенциальной функции, выполненный с возможностью осуществления нормализации потенциальной функции ϕ (например, по области триангулированной поверхности 218) применением масштабирующей функции к потенциальной функции ϕ таким образом, что контурные линии 310 равномерно распределены по триангулированной поверхности 218.
[00107] Нормализатор 538 потенциальной функции при необходимости выполнен с возможностью проведения нормализации с усреднением применением масштабирующей функции к потенциальной функции ϕ, которая корректирует значение величины градиента ϕ вдоль каждой контурной линии 310 таким образом, что величина градиента вдоль каждой контурной линии 310 в среднем эквивалентна ширине 408 головки автоматизированной установки 400 для укладки волокон. Такая компоновка приводит к тому, что одна или более пар соседних рядов 206 имеют некоторое перекрытие 320 и некоторые зазоры 318 в одном или более местоположениях вдоль длины пары соседних контурных линий 310, как описано выше и показано на ФИГ. 21. В альтернативном варианте реализации изобретения нормализатор 538 потенциальной функции при необходимости выполнен с возможностью проведения нормализации по ширине головки применением масштабирующей функции к потенциальной функции ϕ, которая корректирует значение величины градиента ϕ вдоль каждой контурной линии 310 таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии 310 не больше, чем ширина 408 головки автоматизированной установки 400 для укладки волокон. Такая компоновка приводит к тому, что одна или более пар соседних рядов 206 имеют некоторое перекрытие 320, но без зазоров 318 в одном или более местоположениях вдоль длины пары соседних контурных линий 310, как описано выше и показано на ФИГ. 22.
[00108] Для триангулированной поверхности 218, в которой по меньшей мере одна из контурных линий 310 является несвязанной по триангулированной поверхности 218 (например, вследствие отверстия 232 - ФИГ. 23-24), распределитель 536 контурных линий выполнен с возможностью сглаживания потенциальной функции ϕ посредством минимизации вариации величины градиента потенциальной функции ϕ, как описано выше. В альтернативном варианте реализации изобретения распределитель 536 контурных линий выполнен с возможностью распределения контурных линий 310 по триангулированной поверхности 218 посредством разделения поверхности (например, ФИГ. 24) на области 312 вдоль контурных линий 310 потенциальной функции ϕ таким образом, что все контурные линии 310 в каждой области 312 соединены, как также описано выше.
[00109] Определитель 540 программы укладки выполнен с возможностью использования контурных линий 310 нормализованной потенциальной функции (h ° ϕ - ФИГ. 16) в качестве траекторий 314 волокон в программе 526 для укладки для изготовления композитного слоя 202 посредством укладки рядов 206 композитной ленты 208. Если используют вышеописанную нормализацию по ширине головки, а перекрытия 320 (ФИГ. 21-22) нежелательны, информация о градиенте может быть использована для обеспечения первой оценки количества жгутов 204 (ФИГ. 19), необходимых в различных местоположениях вдоль траектории 314 волокна (например, средней линии ряда) с обеспечением для автоматизированной установки 400 для укладки волокон ширины ряда посредством резки и добавления жгутов 204 с боковых краев композитной ленты 208. Программа 256 для укладки может быть выдана в автоматизированную установку 400 для укладки волокон (ФИГ. 19-22), которая включает в себя аппликаторную головку 406, выполненную с возможностью выравнивания средней линии 410 (ФИГ. 20) аппликаторной головки 406 с контурными линиями 310 (например, траекториями волокон) при укладке рядов 206 (например, композитной ленты 208) на подложку 210. Автоматизированная установка 400 для укладки волокон может укладывать множество композитных слоев 202 друг на друга согласно заданной последовательности укладки в стопу для изготовления композитной укладки для последующей обработки (например, отверждения) с образованием слоистого композиционного материала 200 (ФИГ. 2-3).
[00110] Устройство 514 отображения может принимать и отображать вышеупомянутое определение 214 поверхности (ФИГ. 6), определение 226 углов волокон (ФИГ. 7), аппроксимацию поверхности (например, триангулированную поверхность 218 - ФИГ. 8) композитного слоя 202, первое поле Х0 единичных векторов (ФИГ. 9), второе поле X единичных векторов (ФИГ. 10), третье поле  единичных векторов (ФИГ. 11), поле Y неединичных векторов (ФИГ. 12), первой потенциальной функции ϕH (ФИГ. 13), второй потенциальной функции ϕI (ФИГ. 14), третьей потенциальной функции ϕА (ФИГ. 15) и нормализованной потенциальной функции (h o ϕ - ФИГ. 16). Устройство 514 отображения может принимать указанные выше данные от одного или более соответствующих компонентов процессорной системы 500 посредством канала 502 связи. Устройство 514 отображения может отображать значения в виде графического отображения и/или числовых значений.
единичных векторов (ФИГ. 11), поле Y неединичных векторов (ФИГ. 12), первой потенциальной функции ϕH (ФИГ. 13), второй потенциальной функции ϕI (ФИГ. 14), третьей потенциальной функции ϕА (ФИГ. 15) и нормализованной потенциальной функции (h o ϕ - ФИГ. 16). Устройство 514 отображения может принимать указанные выше данные от одного или более соответствующих компонентов процессорной системы 500 посредством канала 502 связи. Устройство 514 отображения может отображать значения в виде графического отображения и/или числовых значений.
[00111] В одном варианте реализации процессорная система 500 может включать в себя один или более процессоров 504 для исполнения инструкций компьютерочитаемых программных инструкций 524, которые могут быть установлены в запоминающее устройство 506. В альтернативном варианте реализации изобретения процессор 504 может содержать многопроцессорное ядро, имеющее два или более встроенных процессорных ядра. Кроме того, процессор 504 может содержать основной процессор и один или более вторичных процессоров, встроенных в чип. Процессор 504 может также содержать многопроцессорную систему, имеющую множество аналогично сконфигурированных процессоров.
[00112] Со ссылкой на ФИГ. 27, процессорная система 500 может дополнительно включать в себя одно или более запоминающих устройств 506, которые могут содержать одно или более энергозависимых или энергонезависимых устройств 508 для хранения. Однако запоминающее устройство 506 может содержать любое аппаратное устройство для хранения данных. Например, запоминающее устройство 506 может содержать память произвольного доступа или кэш интерфейса и/или встроенный концентратор контроллера памяти, который может быть включен в канал 502 связи. Запоминающее устройство 506 может быть выполнено с возможностью постоянного и/или временного хранения любого одного из множества различных типов данных, компьютерочитаемого кода или программных инструкций 524 или любого другого типа информации. Энергонезависимое устройство 508 для хранения может быть предоставлено в различных конфигурациях, включая, но не ограничиваясь ими, устройство флэш-памяти, жесткий диск, оптический диск, жесткий диск, магнитную ленту или любой другой подходящий вариант осуществления для долговременного хранения. Кроме того, энергонезависимое устройство 508 для хранения может содержать съемное устройство, такое как съемный жесткий диск.
[00113] Процессорная система 500 может дополнительно включать в себя одно или более устройств 510 ввода/вывода для способствования передачи данных между компонентами, которые могут быть соединены с процессорной системой 500. Устройство 510 ввода/вывода может быть напрямую и/или опосредованно соединено с процессорной системой 500. Устройство 510 ввода/вывода может способствовать вводу пользователя посредством периферийного устройства, такого как клавиатура, мышь, джойстик, сенсорный экран и любое другое подходящее устройство для ввода данных в процессорную систему 500. Устройство 510 ввода/вывода может дополнительно включать в себя устройство вывода для передачи данных, представляющих вывод процессорной системы 500. Например, устройство 510 ввода/вывода может содержать устройство 514 отображения, такое как компьютерный монитор или экран компьютера, для отображения результатов обработки данных процессорной системой 500. Устройство 510 ввода/вывода при необходимости может включать в себя факсимильный аппарат для печати печатной копии информации, обрабатываемой процессорной системой 500.
[00114] Со ссылкой на ФИГ. 27, процессорная система 500 может включать в себя одно или более устройств 512 связи для способствования связи процессорной системы 500 в пределах компьютерной сети и/или с другими процессорными системами. Связь процессорной системы 500 с компьютерной сетью или с другими процессорными системами может быть осуществлена беспроводными средствами и/или с помощью проводов. Например, устройство 512 связи может содержать контроллер сетевого интерфейса для обеспечения беспроводной или кабельной связи между процессорной системой 500 и компьютерной сетью. Устройство 512 связи также может содержать модем и/или сетевой адаптер или любое из множества альтернативных устройств для передачи и приема данных.
[00115] Одна или более операций описанного выше способа 100 для определения направления и пространственного разнесения 316 траекторий 314 волокон для композитного слоя 202 могут быть выполнены процессором 504 и/или одним или более из следующего: аппроксиматором 528 поверхности, определителем 530 векторного поля, минимизатором 532 ротора, определителем 534 потенциальной функции, распределителем 536 контурных линий, нормализатором 538 потенциальной функции и определителем 540 программы укладки с использованием компьютерочитаемых программных инструкций 524. Компьютерочитаемые программные инструкции 524 могут содержать программный код, который может включать в себя программный код, пригодный для использования компьютером, и компьютерочитаемый программный код. Компьютерочитаемые программные инструкции 524 могут быть считаны и исполнены процессором 504. Компьютерочитаемые программные инструкции 524 могут обеспечивать возможность исполнения процессором 504 одной или более операций описанных выше вариантов реализации изобретения, связанных с определением направления и пространственного разнесения 316 траекторий 314 волокон для композитного слоя 202.
[00116] Со ссылкой на ФИГ. 27, компьютерочитаемые программные инструкции 524 могут включать в себя рабочие инструкции для процессорной системы 500 и могут дополнительно включать в себя приложения и программы. Компьютерочитаемые программные инструкции 524 могут содержаться и/или быть загружены в одно или более запоминающих устройств 506 и/или энергонезависимых устройств 508 для хранения для исполнения процессором 504 и/или аппроксиматором 528 поверхности, определителем 530 векторного поля, минимизатором 532 ротора, определителем 534 потенциальной функции, распределителем 536 контурных линий, нормализатором 538 потенциальной функции и определителем 540 программы укладки. Как указано выше, одно или более из запоминающих устройств 506 и/или энергонезависимых устройств 508 для хранения могут быть соединены с возможностью связи с одним или более из остальных компонентов, показанных на ФИГ. 27, посредством канала 502 связи.
[00117] Компьютерочитаемые программные инструкции 524 могут содержаться на материальных или нематериальных, кратковременных или некратковременных компьютерочитаемых носителях 518, которые могут быть загружены или переданы в процессорную систему 500 для исполнения процессором 504. Компьютерочитаемые программные инструкции 524 и компьютерочитаемые носители 518 содержат компьютерный программный продукт 516. В одном варианте реализации компьютерочитаемые носители 518 могут содержать компьютерочитаемые носители 520 для хранения и/или компьютерочитаемые носители 522 для сигнала.
[00118] Компьютерочитаемые носители 520 для хранения могут содержать множество различных вариантов реализации изобретения включая, но не ограничиваясь этим, оптические диски и магнитные диски, которые могут быть загружены в дисковод, устройство флэш-памяти или другое устройство, или аппаратные средства хранения для передачи данных на устройство хранения, такое как жесткий диск. Компьютерочитаемые носители 520 для хранения могут быть несъемно установлены в процессорной системе 500. Компьютерочитаемые носители 520 для хранения могут содержать любые подходящие носители для хранения и могут включать в себя, без ограничения, полупроводниковые системы или носитель для распространения. В этом отношении, компьютерочитаемые носители 520 для хранения могут содержать электронные носители, магнитные носители, оптические носители, электромагнитные носители и инфракрасные носители. Например, компьютерочитаемые носители 520 для хранения могут содержать магнитную ленту, компьютерную дискету, оперативное запоминающее устройство и постоянное запоминающее устройство. Неограничивающие примеры вариантов реализации оптических дисков могут включать в себя компакт-диски - постоянное запоминающее устройство, компакт-диски - чтение/запись и цифровые видеодиски.
[00119] Компьютерочитаемые носители 522 для сигнала могут содержать компьютерочитаемые программные инструкции 524 и могут быть реализованы в различных конфигурациях сигналов данных, включая, но не ограничиваясь этим, электромагнитный сигнал и оптический сигнал. Такие сигналы данных могут быть переданы посредством любой подходящей линии связи, включая беспроводные или проводные средства. Например, проводные средства могут содержать оптико-волоконный кабель, коаксильный кабель, сигнальный провод и другие подходящие средства для передачи данных беспроводными или физическими средствами.
[00120] Со ссылкой на ФИГ. 27, компьютерочитаемые носители 522 для сигнала могут способствовать загрузке компьютерочитаемых программных инструкций 524 в энергонезависимое хранилище или другое подходящее хранилище или запоминающее устройство для использования в процессорной системе 500. Например, компьютерочитаемые программные инструкции 524, содержащиеся в компьютерочитаемых носителях 520 для хранения, могут быть загружены в процессорную систему 500 по компьютерной сети с сервера или клиентского компьютера другой системы.
[00121] Любой из множества различных вариантов реализации процессорной системы 500 может быть реализован с использованием любого аппаратного устройства или системы, выполненных с возможностью исполнения компьютерочитаемых программных инструкций 524. Например, процессор 504 может содержать аппаратный блок, выполненный с возможностью реализации одной или более конкретных функций, при этом компьютерочитаемые программные инструкции 524 для реализации указанных функций могут быть предварительно загружены в запоминающее устройство 506.
[00122] В одном варианте реализации процессор 504 может содержать специализированную интегральную микросхему (ASIC), программируемое логическое устройство или любое другое аппаратное устройство, выполненное с возможностью реализации одной или более конкретных функций или операций. Например, программируемое логическое устройство может быть временно или постоянно запрограммировано на реализацию одной или более операций, относящихся к определению потенциальной функции ϕ, оптимизации потенциальной функции ϕ и/или выполнению нормализации потенциальной функции ϕ. Программируемое логическое устройство может содержать программируемую логическую матрицу, программируемую пользователем логическую матрицу и программируемую пользователем вентильную матрицу, и любое другое подходящее логическое устройство, без ограничения. В одном варианте реализации компьютерочитаемые программные инструкции 524 могут управляться одним или более процессором 504 и/или другими устройствами, включающими в себя один или более аппаратных блоков, связанных с процессором 504. Некоторые части компьютерочитаемых программных инструкций 524 могут быть процессором 504, а другие части компьютерочитаемых программных инструкций 524 могут выполняться аппаратными блоками.
[00123] Предпочтительно, различные варианты реализации изобретения, описанные выше, обеспечивают возможность определения траекторий 314 волокон, которые соответствуют определению 226 углов волокон, заданных для композитного слоя 202, а также обеспечивают возможность оптимизации пространственного разнесения 316 между траекториями 314 волокон посредством количественной оценки сходимости и/или расхождения таких траекторий 314 волокон. Технический результат реализации описанного выше способа 100 заключается в способности прогнозировать появление перекрытий 320 и зазоров 318 между рядами 206, что может отрицательно влиять на конструктивные свойства (например, прочность и жесткость) и/или качество поверхности слоистого композиционного материала 200, выполненной из композитных слоев 202. Еще один технический результат описанного выше способа 100 заключается в том, что инженеры-конструкторы имеют возможность прогнозировать и учитывать влияние сходимости и расхождения на технологичность слоистого композиционного материала и, таким образом, избегать дорогостоящей и трудоемкой доработки, которая в противном случае была бы необходима во время изготовления слоистого композиционного материала 200 для компенсации перекрытий 320 и/или зазоров 318 между рядами 206 композитного слоя 202. Дополнительный технический результат реализации описанного выше способа 100 заключается в возможности учета сходимости и расхождения во время этапа проектирования слоистого композиционного материала 200, что позволяет рассматривать более широкий спектр проектов, включая проекты материалов, которые могут быть более эффективными с точки зрения прочности и/или жесткости. Кроме того, описанный выше способ 100 позволяет прогнозировать количество рядов без выполнения полного числового управления (ЧПУ) с прогаммированием автоматизированной установки для укладки волокон, что позволяет сравнивать разные проекты материалов.
Кроме того, раскрытие изобретения содержит варианты реализации согласно следующим пунктам.
Пункт 1. Способ определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности и определении углов волокон, имеющем один или более углов волокон, включающий следующие этапы:
формирование аппроксимации поверхности для определения поверхности, содержащей триангулированную поверхность, включающей сетку треугольников, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определение на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определение на триангулированной поверхности второго поля единичных векторов посредством поворота на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определение на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
определение функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определение потенциальной функции, имеющей контурные линии, при этом потенциальная функция является первой потенциальной функцией, определенной выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов;
выполнение нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии равномерно распределены по триангулированной поверхности; и
использование контурных линий нормализованной потенциальной функции в качестве траекторий волокон для укладки рядов композиционного материала вдоль траекторий волокон для изготовления композитного слоя.
Пункт 2. Способ по пункту 1, также включающий этап:
определения второй потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации отклонения между направлением поля неединичных векторов и направлением градиента потенциальной функции, также выполняя корректировку функции величины, масштабирующей третье поле единичных векторов.
Пункт 3. Способ по пункту 1, также включающий этап:
определения третьей потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации только отклонения между направлением третьего поля единичных векторов и направлением градиента потенциальной функции.
Пункт 4. Способ по пункту 1, согласно которому на этапе определения второго поля единичных векторов на триангулированной поверхности:
определение углов волокон содержит постоянные углы слоя.
Пункт 5. Способ по пункту 1, также включающий:
сглаживание потенциальной функции посредством минимизации вариации величины градиента потенциальной функции.
Пункт 6. Способ по пункту 1, согласно которому контурные линии являются несвязанными по триангулированной поверхности и, после определения потенциальной функции, способ также включает:
разделение аппроксимации поверхности на области вдоль контурных линий потенциальной функции таким образом, что все контурные линии в каждой области соединены.
Пункт 7. Способ по пункту 1, согласно которому этап выполнения нормализации потенциальной функции включает:
применение масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия величины градиента вдоль каждой контурной линии в среднем эквивалентна ширине головки автоматизированной установки для укладки волокон.
Пункт 8. Способ по пункту 1, согласно которому этап выполнения нормализации потенциальной функции включает:
применение масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии не превышает ширины головки автоматизированной установки для укладки волокон, чтобы избежать зазоров между соседними рядами.
Пункт 9. Способ по пункту 1, согласно которому контурные линии нормализованной потенциальной функции имеют пространственное разнесение, и который также включает этап:
регулировки ширины одного или более рядов, чтобы они были меньше, чем пространственное разнесение между контурными линиями, чтобы избежать перекрытия соседних рядов.
Пункт 10. Способ определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности и определении углов волокон, имеющем один или более углов волокон, включающий следующие этапы:
формирование аппроксимации поверхности для определения поверхности, содержащей триангулированную поверхность, включающей сетку треугольников, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определение на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определение на триангулированной поверхности второго поля единичных векторов посредством поворота, на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определение на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
определение функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определение потенциальной функции в качестве первой потенциальной функции, имеющей контурные линии, при этом первую потенциальную функцию определяют выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов;
выполнение нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии потенциальной функции равномерно распределены по триангулированной поверхности; и
использование контурных линий нормализованной потенциальной функции в качестве траекторий волокон в программе укладки, которую выдают в автоматизированную установку для укладки волокон, имеющую аппликаторную головку, выполненную с возможностью укладки рядов композитной ленты вдоль траекторий волокон.
Пункт 11. Процессорная система для определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности композитного слоя и определении углов волокон, имеющем один или более углов волокон, содержащая:
аппроксиматор поверхности, выполненный с возможностью формирования аппроксимации поверхности для композитного слоя, содержащей триангулированную поверхность, включающей сетку треугольников, представляющую определение поверхности, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определитель векторного поля, выполненный с возможностью:
определения на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определения на триангулированной поверхности второго поля единичных векторов посредством поворота, на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определения на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
минимизатор ротора, выполненный с возможностью определения функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определитель потенциальной функции, выполненный с возможностью определения потенциальной функции в качестве первой потенциальной функции выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов на триангулированной поверхности, при этом потенциальная функция имеет контурные линии;
нормализатор потенциальной функции, выполненный с возможностью осуществления нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии равномерно распределены по триангулированной поверхности посредством задания постоянных значений потенциальной функции, которые изменяются с фиксированными интервалами между соседними парами контурных линий; и
определитель программы укладки, выполненный с возможностью использования контурных линий нормализованной потенциальной функции в качестве траекторий волокон в программе укладки для изготовления композитного слоя посредством укладки рядов композитной ленты, которые проходят по траекториям волокон, с образованием таким образом композитного слоя.
Пункт 12. Процессорная система по пункту 11, в которой:
определитель потенциальной функции выполнен с возможностью определения второй потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации отклонения между направлением поля неединичных векторов и направлением градиента второй потенциальной функции, выполняя также корректировку функции величины, масштабирующей третье поле единичных векторов.
Пункт 13. Процессорная система по пункту 11, в которой:
определитель потенциальной функции выполнен с возможностью определения третьей потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации только отклонения между направлением третьего поля единичных векторов и направлением градиента потенциальной функции.
Пункт 14. Процессорная система по пункту 11, в которой:
определитель векторного поля выполнен с возможностью установления первого поля единичных векторов посредством проецирования розеточного вектора физического пространства на триангулированную поверхность.
Пункт 15. Процессорная система по пункту 11, в которой:
определитель векторного поля выполнен с возможностью установления второго поля единичных векторов на триангулированной поверхности на основании определения углов волокон, содержащего постоянные углы слоя.
Пункт 16. Процессорная система по пункту 11, в которой:
определитель векторного поля выполнен с возможностью установления второго поля единичных векторов на триангулированной поверхности на основании определения углов волокон, получаемого исходя из функции координат триангулированной поверхности.
Пункт 17. Процессорная система по пункту 11, в которой:
по меньшей мере одна из контурных линий является несвязанной по триангулированной поверхности; и
нормализатор потенциальной функции выполнен с возможностью сглаживания потенциальной функции посредством минимизации вариации величины градиента потенциальной функции.
Пункт 18. Процессорная система по пункту 11, в которой:
по меньшей мере одна из контурных линий является несвязанной по триангулированной поверхности; и
нормализатор потенциальной функции выполнен с возможностью распределения контурных линий по триангулированной поверхности посредством разделения аппроксимации поверхности на области вдоль контурных линий потенциальной функции таким образом, что все контурные линии в каждой области соединены.
Пункт 19. Процессорная система по пункту 11, в которой:
нормализатор потенциальной функции выполнен с возможностью применения масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия величины градиента вдоль каждой контурной линии в среднем эквивалентна ширине головки автоматизированной установки для укладки волокон.
Пункт 20. Процессорная система по пункту 11, в которой:
нормализатор потенциальной функции выполнен с возможностью применения масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии не превышает ширины головки автоматизированной установки для укладки волокон.
Многие модификации и другие конфигурации раскрытия изобретения окажутся очевидными для специалиста в области техники, к которой относится это раскрытие изобретения, с получением преимущества, обеспечиваемого идеями, представленными в вышеприведенных описаниях и связанных чертежах. Конфигурации, описанные в настоящем документе, предназначены для иллюстрации и не предназначены для ограничения или исчерпания. Хотя в настоящем документе используются конкретные термины, они используются только в общем и описательном смысле, а не в целях ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ СКОРОСТИ МНОГОМЕРНОГО ПЕРЕМЕЩЕНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2013 |
|
RU2629551C2 |
| СИСТЕМА СВОБОДНОГО РУЛЕНИЯ ДЛЯ ПОДВИЖНЫХ МАШИН | 2018 |
|
RU2760718C2 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2013 |
|
RU2549683C2 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ МАНЕВРОВ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА В КОНФЛИКТНЫХ СИТУАЦИЯХ | 2007 |
|
RU2461889C2 |
| Способ и система автоматизированного моделирования ортотика | 2021 |
|
RU2758752C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ОБЪЕМНОГО НАПРЯЖЕННОГО СОСТОЯНИЯ | 2022 |
|
RU2808931C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| КОДЕР, ДЕКОДЕР И СООТВЕТСТВУЮЩИЕ СПОСОБЫ | 2020 |
|
RU2824186C2 |
| ЭЛЕКТРОД-ИНСТРУМЕНТ ДЛЯ КОМБИНИРОВАННОЙ РЕЗКИ ТОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 2017 |
|
RU2637868C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
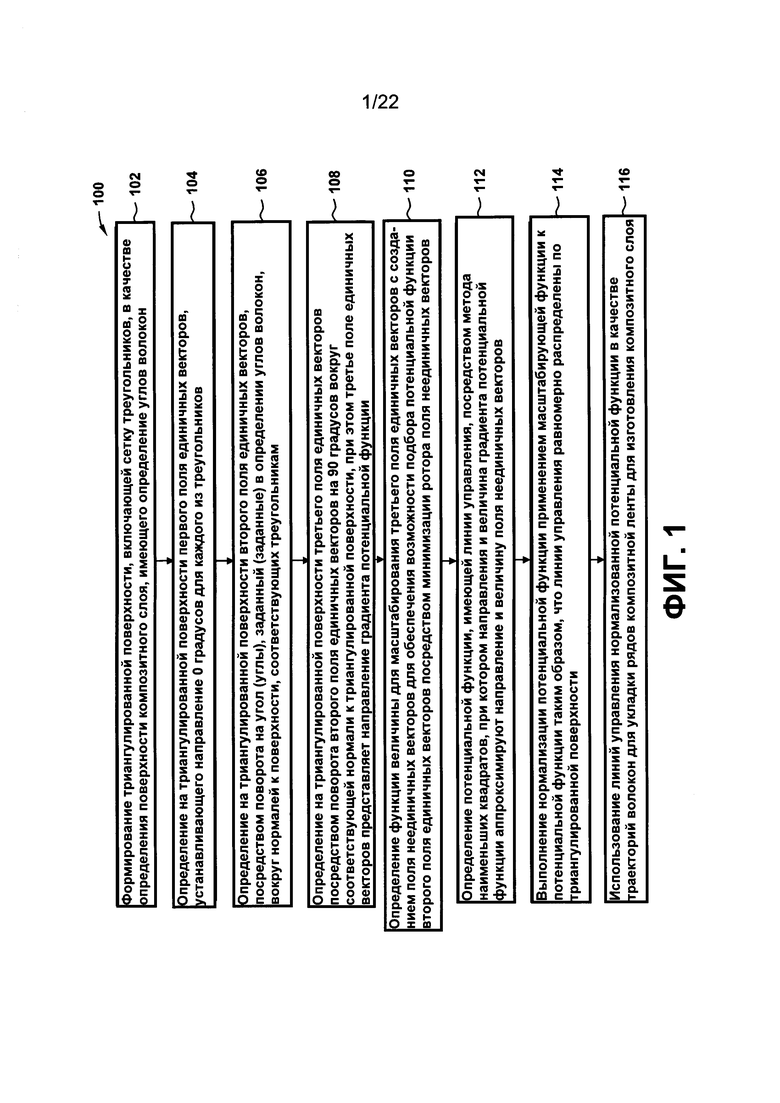
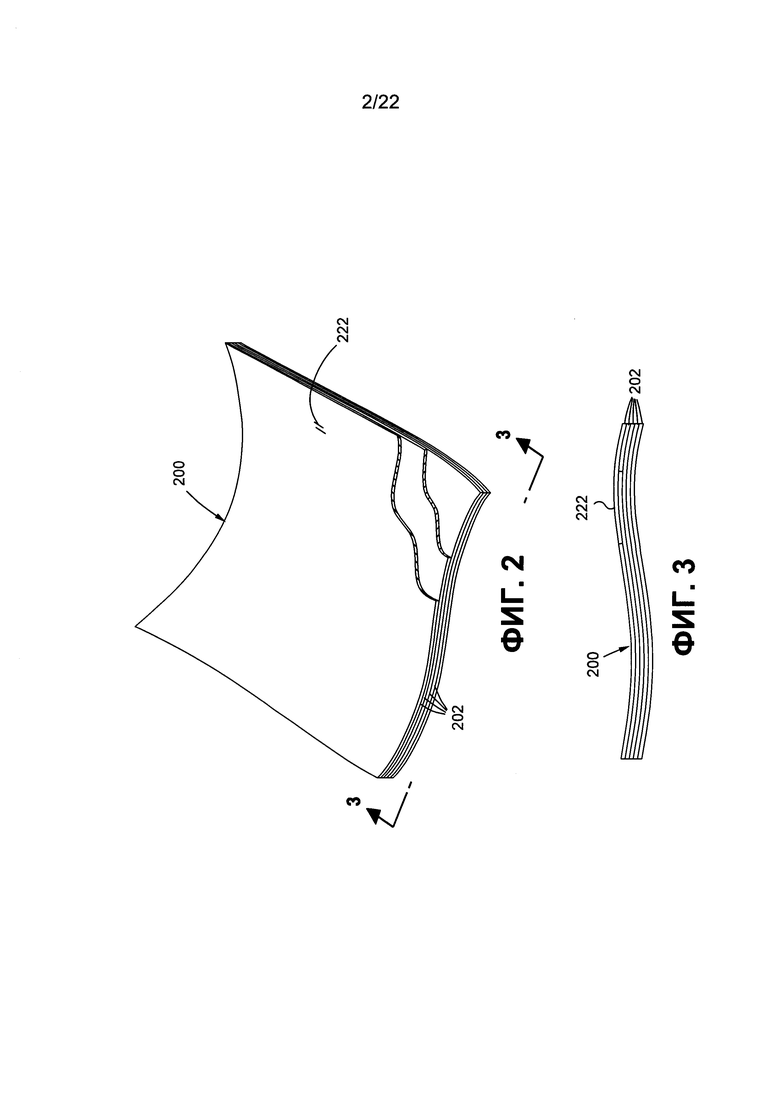

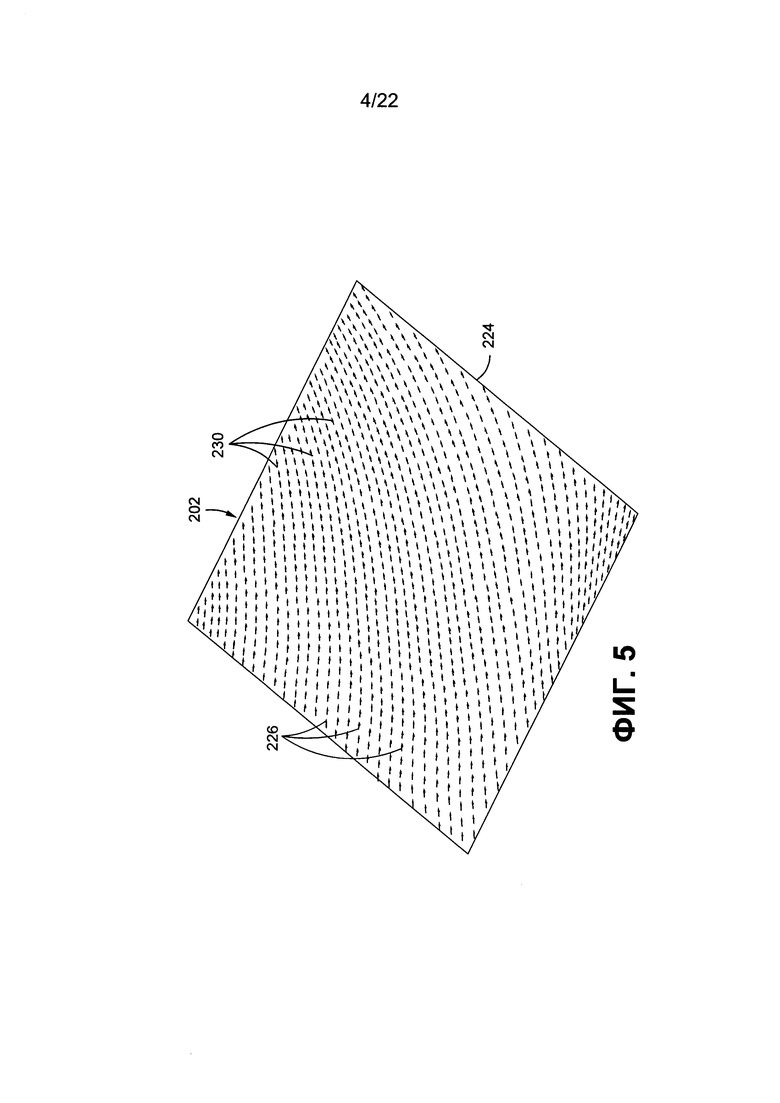
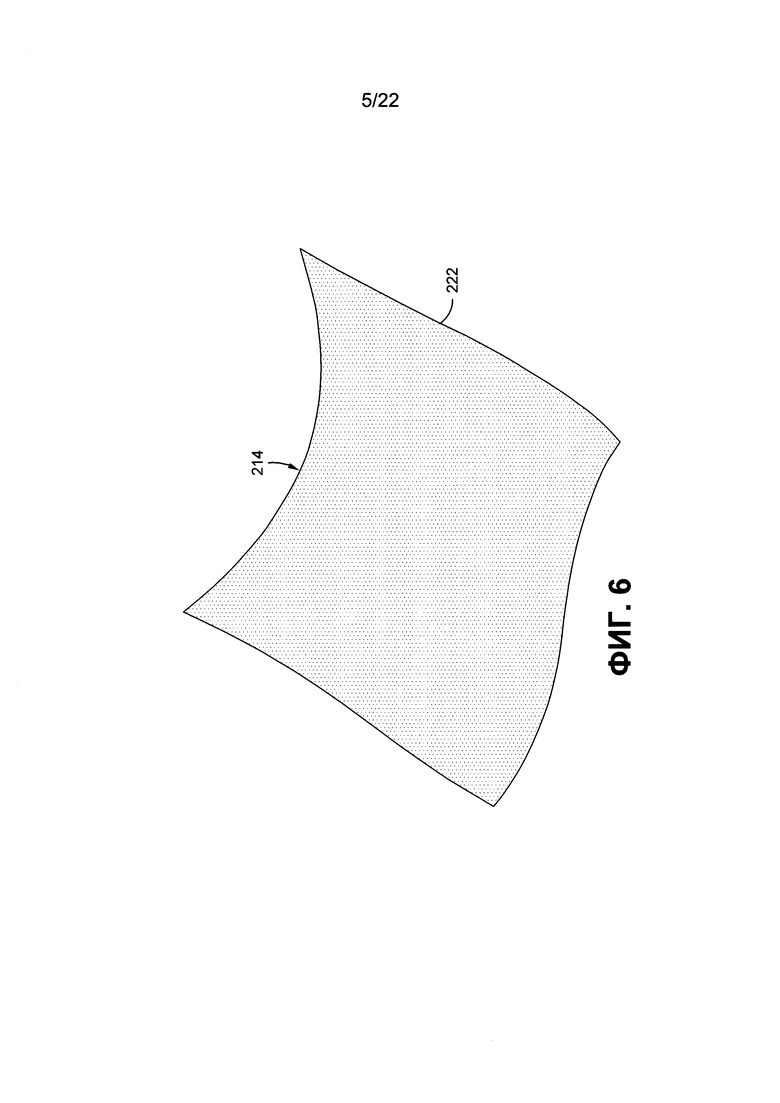


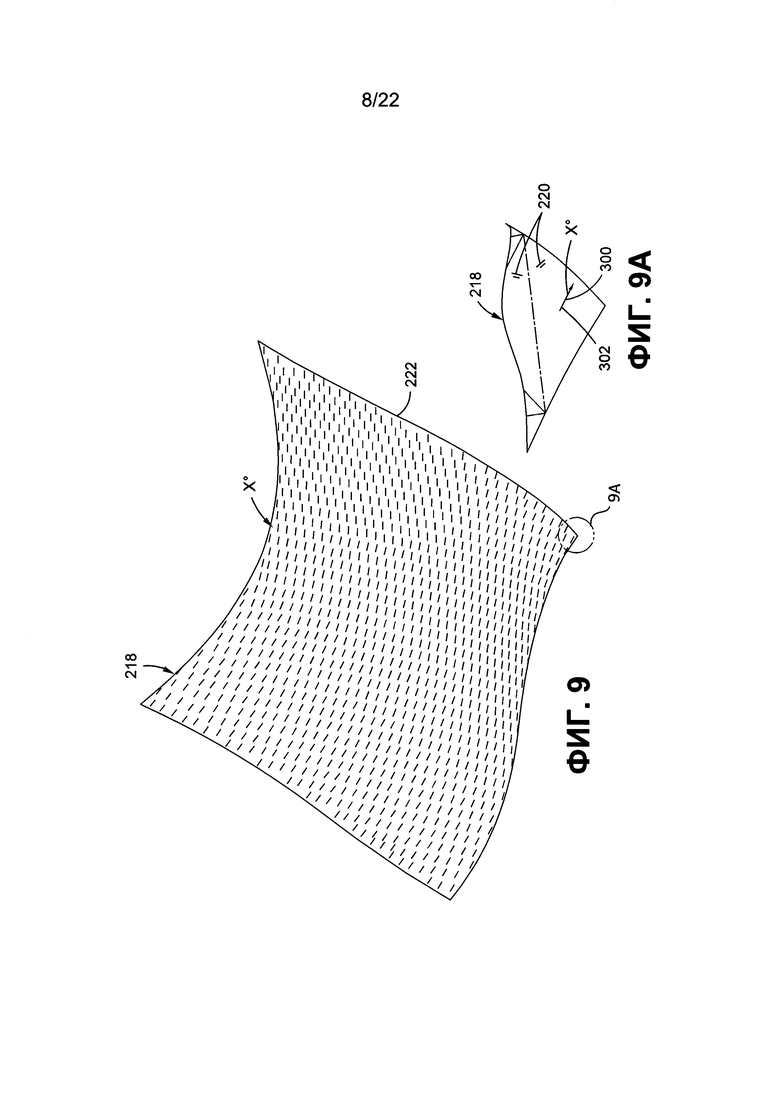

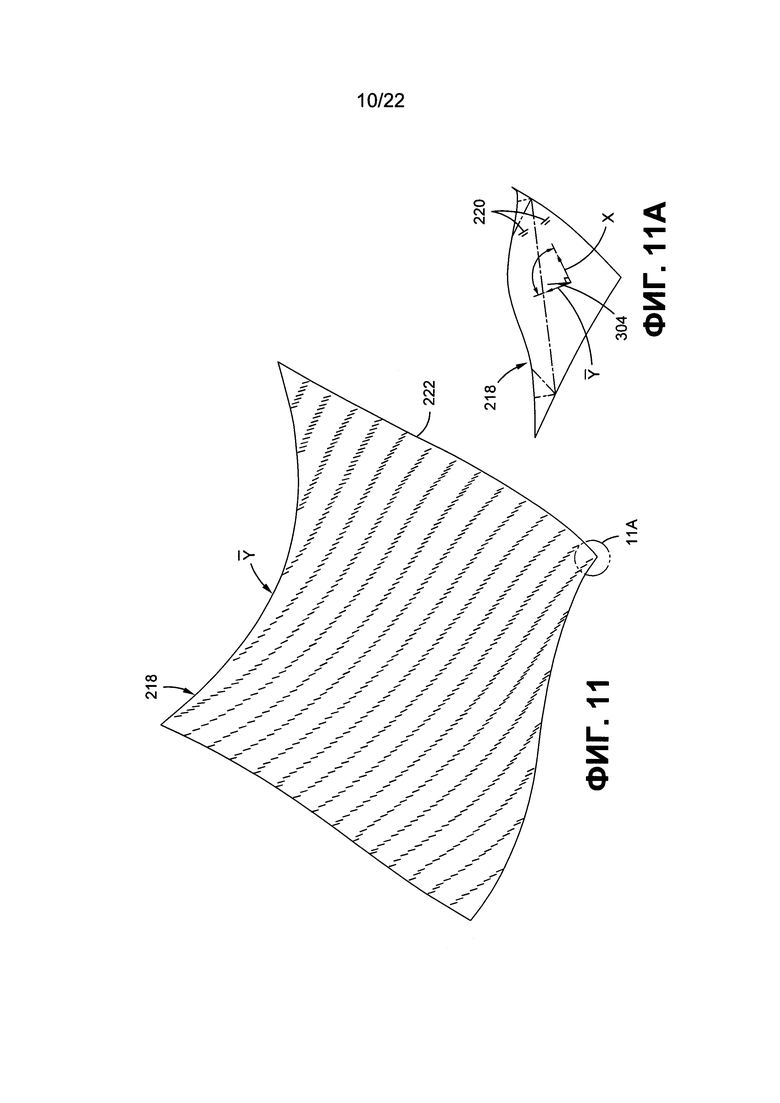




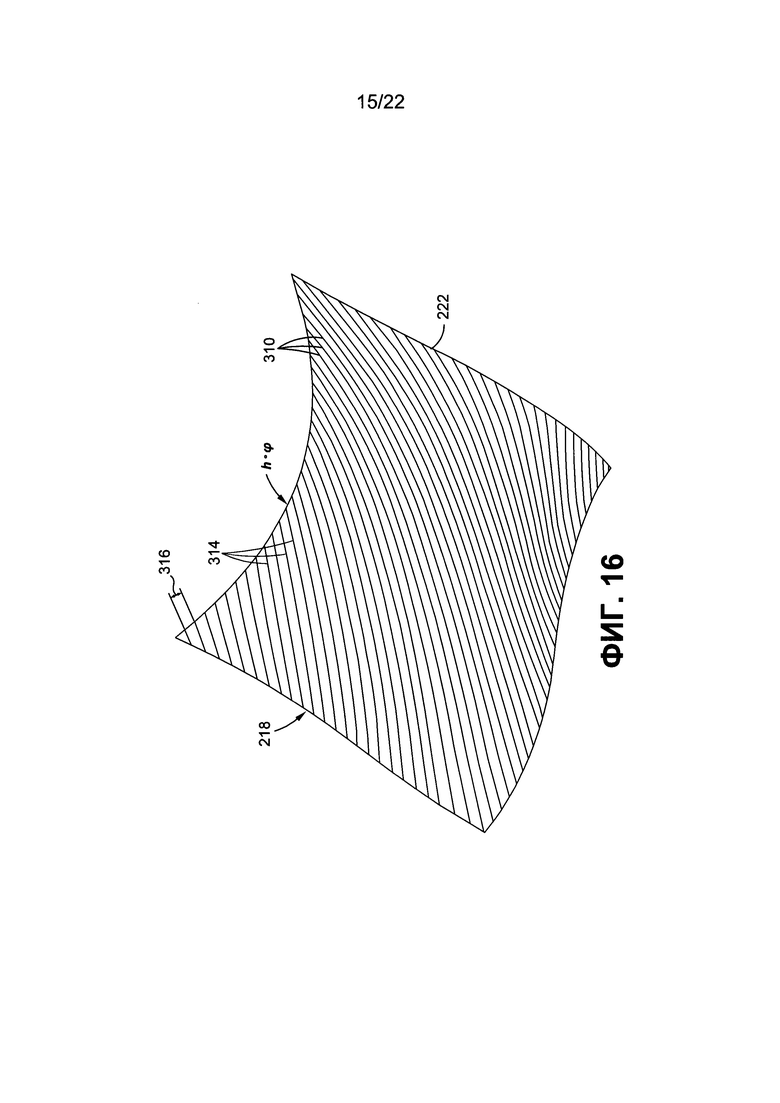
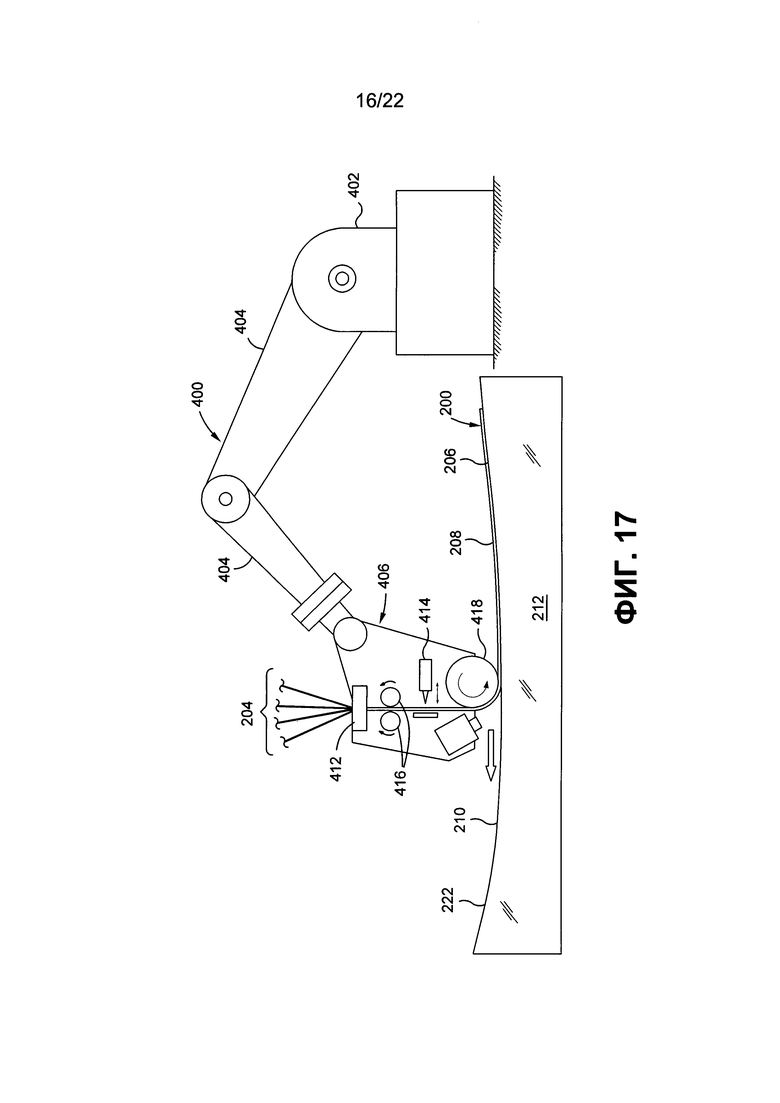
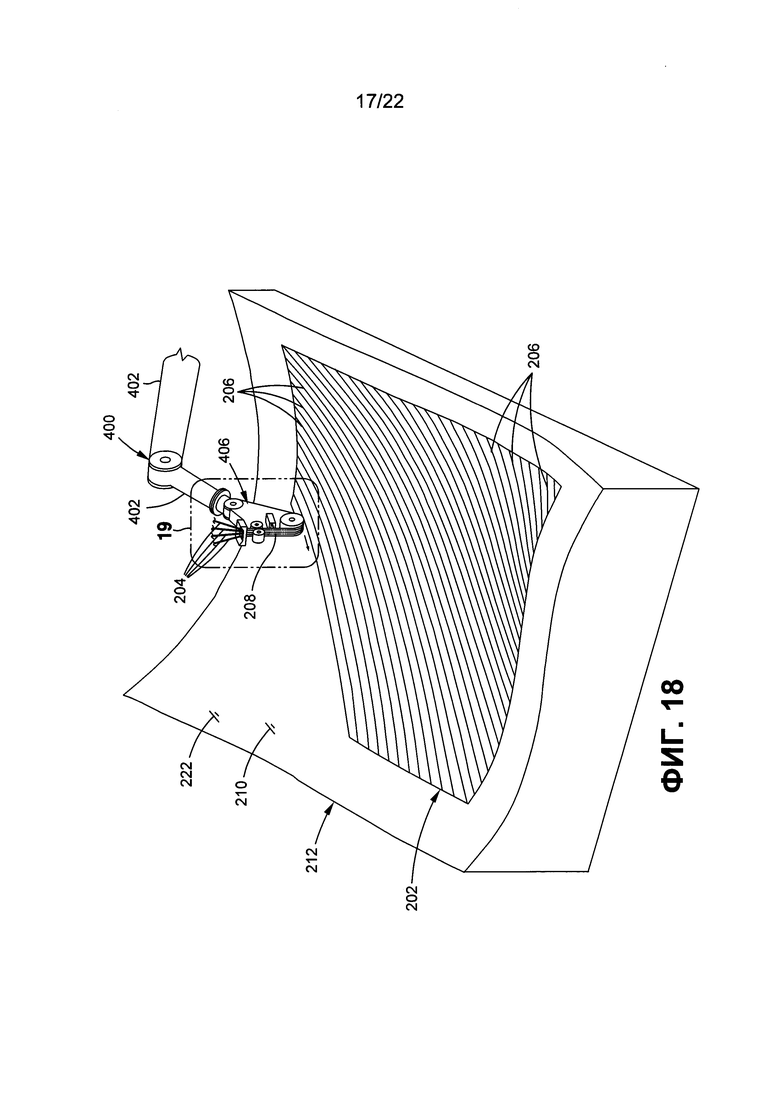


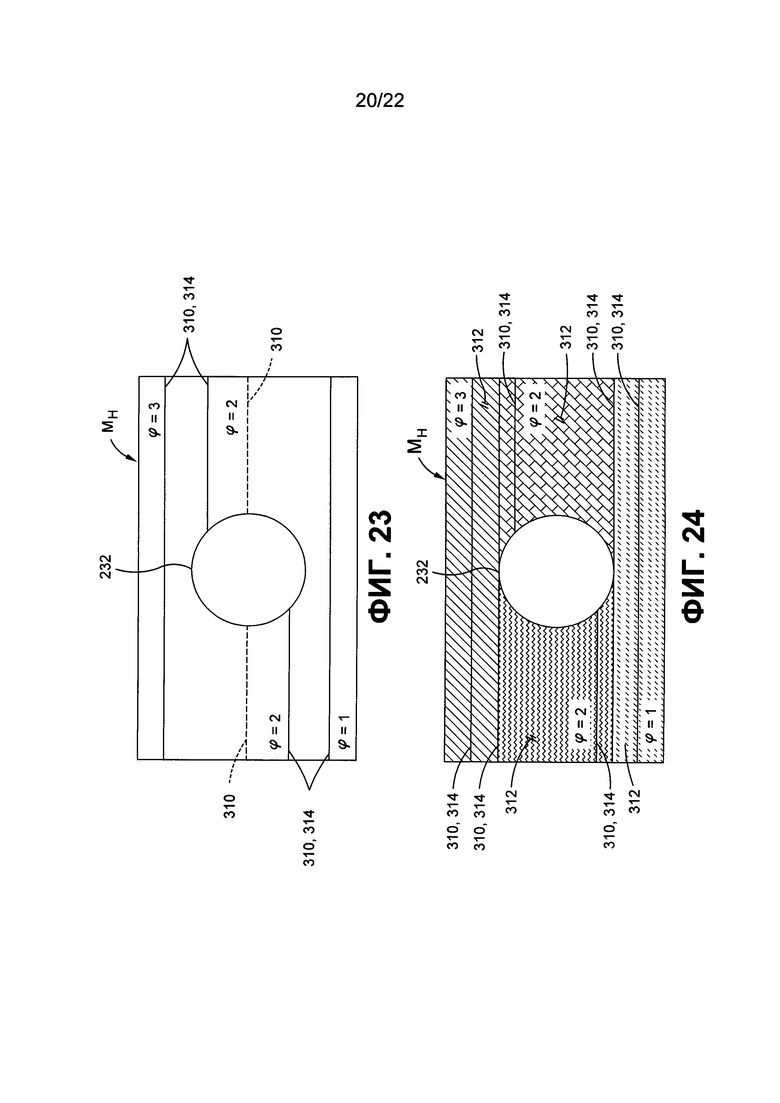
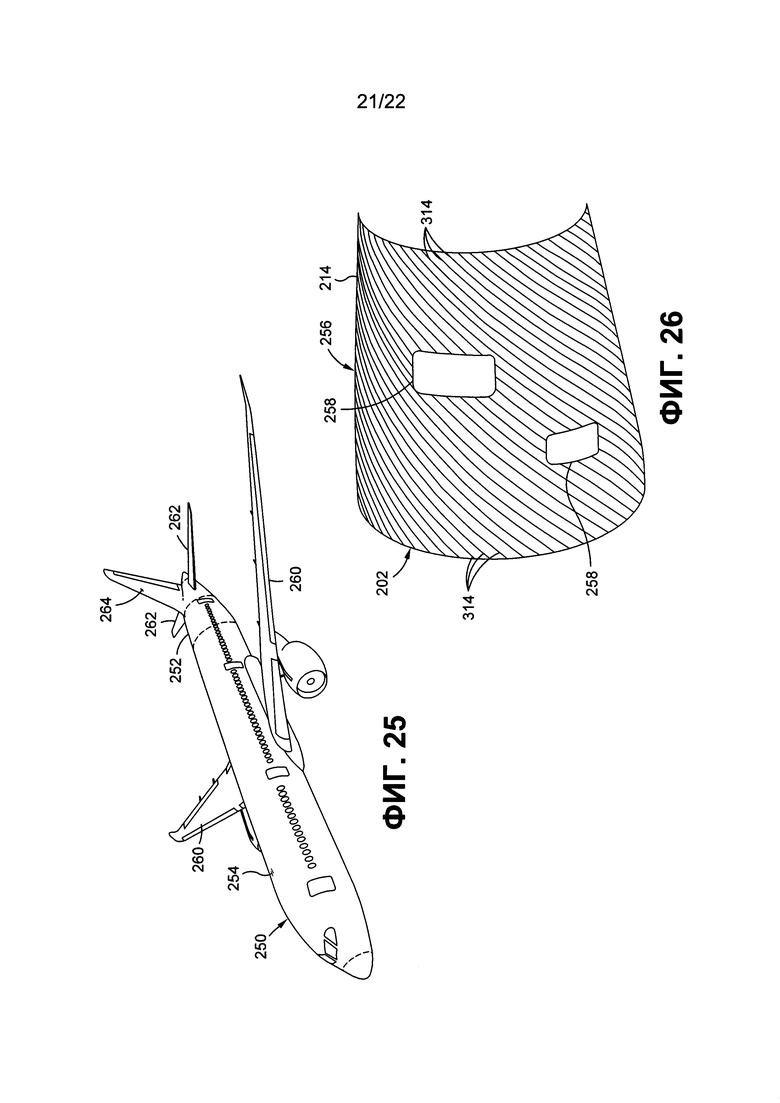

Изобретение относится к области вычислительной техники обработки данных для изготовления композитного слоя. Технический результат заключается в оптимизации пространственного разнесения траекторий волокон посредством количественной оценки сходимости и/или расхождения таких траекторий волокон. Технический результат достигается за счет формирования триангулированной поверхности композитного слоя и определения первого поля единичных векторов, устанавливающего направление 0 градусов для триангулированной поверхности. Второе поле единичных векторов определяют посредством поворота на заданные углы волокон, измеряемые относительно направления 0 градусов, первого поля единичных векторов вокруг нормалей к триангулированной поверхности. Третье поле единичных векторов, представляющее направление градиента потенциальной функции, определяют посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности. Третье поле единичных векторов масштабируют с созданием поля неединичных векторов и первую потенциальную функцию определяют выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента наилучшим образом аппроксимируют направление и величину поля неединичных векторов. Нормализация потенциальной функции равномерно распределяет контурные линии потенциальной функции по триангулированной поверхности. Контурные линии используются в качестве траекторий волокон для укладки рядов композиционного материала для изготовления композитного слоя. 3 н. и 17 з.п. ф-лы, 32 ил.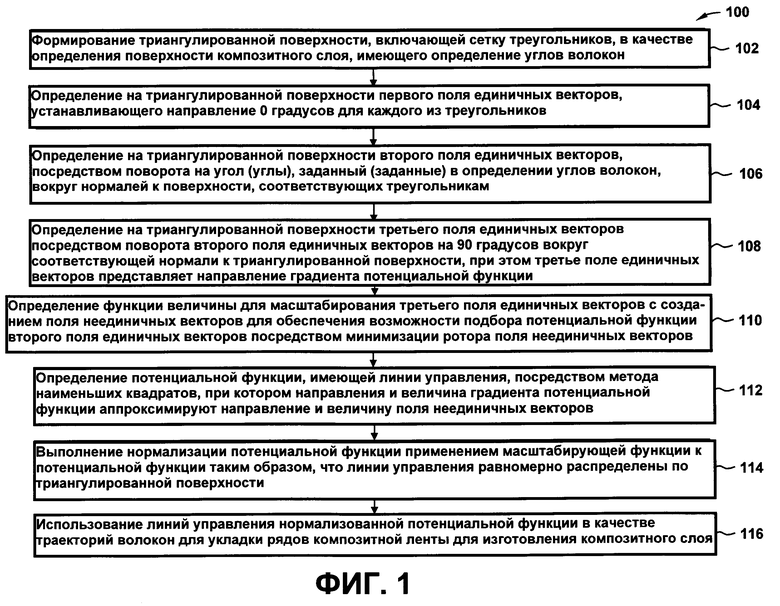
1. Способ определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности и определении углов волокон, имеющем один или более углов волокон, включающий следующие этапы:
формирование аппроксимации поверхности для определения поверхности, содержащей триангулированную поверхность, включающей сетку треугольников, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определение на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определение на триангулированной поверхности второго поля единичных векторов посредством поворота на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определение на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
определение функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определение потенциальной функции, имеющей контурные линии, при этом потенциальная функция является первой потенциальной функцией, определенной выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов;
выполнение нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии равномерно распределены по триангулированной поверхности; и
использование контурных линий нормализованной потенциальной функции в качестве траекторий волокон для укладки рядов композиционного материала вдоль траекторий волокон для изготовления композитного слоя.
2. Способ по п. 1, также включающий этап:
определения второй потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации отклонения между направлением поля неединичных векторов и направлением градиента потенциальной функции, также выполняя корректировку функции величины, масштабирующей третье поле единичных векторов.
3. Способ по п. 1, также включающий этап:
определения третьей потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации только отклонения между направлением третьего поля единичных векторов и направлением градиента потенциальной функции.
4. Способ по п. 1, согласно которому на этапе определения второго поля единичных векторов на триангулированной поверхности:
определение углов волокон содержит постоянные углы слоя.
5. Способ по п. 1, также включающий:
сглаживание потенциальной функции посредством минимизации вариации величины градиента потенциальной функции.
6. Способ по п. 1, согласно которому контурные линии являются несвязанными по триангулированной поверхности и, после определения потенциальной функции, способ также включает:
разделение аппроксимации поверхности на области вдоль контурных линий потенциальной функции таким образом, что все контурные линии в каждой области соединены.
7. Способ по п. 1, согласно которому этап выполнения нормализации потенциальной функции включает:
применение масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия величины градиента вдоль каждой контурной линии в среднем эквивалентна ширине головки автоматизированной установки для укладки волокон.
8. Способ по п. 1, согласно которому этап выполнения нормализации потенциальной функции включает:
применение масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии не превышает ширины головки автоматизированной установки для укладки волокон, чтобы избежать зазоров между соседними рядами.
9. Способ по п. 1, согласно которому контурные линии нормализованной потенциальной функции имеют пространственное разнесение, и который также включает этап:
регулировки ширины одного или более рядов, чтобы они были меньше, чем пространственное разнесение между контурными линиями, чтобы избежать перекрытия соседних рядов.
10. Способ определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности и определении углов волокон, имеющем один или более углов волокон, включающий следующие этапы:
формирование аппроксимации поверхности для определения поверхности, содержащей триангулированную поверхность, включающей сетку треугольников, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определение на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определение на триангулированной поверхности второго поля единичных векторов посредством поворота на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определение на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
определение функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определение потенциальной функции в качестве первой потенциальной функции, имеющей контурные линии, при этом первую потенциальную функцию определяют выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов;
выполнение нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии потенциальной функции равномерно распределены по триангулированной поверхности; и
использование контурных линий нормализованной потенциальной функции в качестве траекторий волокон в программе укладки, которую выдают в автоматизированную установку для укладки волокон, имеющую аппликаторную головку, выполненную с возможностью укладки рядов композитной ленты вдоль траекторий волокон.
11. Процессорная система для определения направления и пространственного разнесения траекторий волокон для композитного слоя композитной укладки при заданных определении поверхности композитного слоя и определении углов волокон, имеющем один или более углов волокон, содержащая:
аппроксиматор поверхности, выполненный с возможностью формирования аппроксимации поверхности для композитного слоя, содержащей триангулированную поверхность, включающей сетку треугольников, представляющую определение поверхности, причем композитный слой имеет по меньшей мере одну из следующих характеристик: определение поверхности имеет неплоский контур, определение углов волокон содержит непостоянные углы волокон;
определитель векторного поля, выполненный с возможностью:
определения на триангулированной поверхности первого поля единичных векторов, устанавливающего направление 0 градусов для каждого из треугольников, при этом направление 0 градусов является направлением, относительно которого измеряют указанные один или более углов волокон;
определения на триангулированной поверхности второго поля единичных векторов посредством поворота на указанные один или более углов волокон, заданных в определении углов волокон, первого поля единичных векторов вокруг нормалей к поверхности, соответственно соотнесенных с треугольниками;
определения на триангулированной поверхности третьего поля единичных векторов, представляющего направление градиента потенциальной функции, посредством поворота второго поля единичных векторов на 90° вокруг соответствующих нормалей к поверхности;
минимизатор ротора, выполненный с возможностью определения функции величины для масштабирования третьего поля единичных векторов по триангулированной поверхности с созданием поля неединичных векторов для обеспечения возможности подбора потенциальной функции с приближением ко второму полю единичных векторов, посредством минимизации ротора поля неединичных векторов;
определитель потенциальной функции, выполненный с возможностью определения потенциальной функции в качестве первой потенциальной функции выполнением подбора методом наименьших квадратов таким образом, что направление и величина градиента первой потенциальной функции наилучшим образом аппроксимируют направление и функцию величины поля неединичных векторов на триангулированной поверхности, при этом потенциальная функция имеет контурные линии;
нормализатор потенциальной функции, выполненный с возможностью осуществления нормализации потенциальной функции применением масштабирующей функции к потенциальной функции таким образом, что контурные линии равномерно распределены по триангулированной поверхности посредством задания постоянных значений потенциальной функции, которые изменяются с фиксированными интервалами между соседними парами контурных линий; и
определитель программы укладки, выполненный с возможностью использования контурных линий нормализованной потенциальной функции в качестве траекторий волокон в программе укладки для изготовления композитного слоя посредством укладки рядов композитной ленты, которые проходят по траекториям волокон, с образованием таким образом композитного слоя.
12. Процессорная система по п. 11, в которой:
определитель потенциальной функции выполнен с возможностью определения второй потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации отклонения между направлением поля неединичных векторов и направлением градиента второй потенциальной функции, выполняя также корректировку функции величины, масштабирующей третье поле единичных векторов.
13. Процессорная система по п. 11, в которой:
определитель потенциальной функции выполнен с возможностью определения третьей потенциальной функции, которая улучшает выравнивание контурных линий со вторым полем единичных векторов посредством минимизации только отклонения между направлением третьего поля единичных векторов и направлением градиента потенциальной функции.
14. Процессорная система по п. 11, в которой:
определитель векторного поля выполнен с возможностью установления первого поля единичных векторов посредством проецирования розеточного вектора физического пространства на триангулированную поверхность.
15. Процессорная система по п. 11, в которой:
определитель векторного поля выполнен с возможностью установления второго поля единичных векторов на триангулированной поверхности на основании определения углов волокон, содержащего постоянные углы слоя.
16. Процессорная система по п. 11, в которой:
определитель векторного поля выполнен с возможностью установления второго поля единичных векторов на триангулированной поверхности на основании определения углов волокон, получаемого исходя из функции координат триангулированной поверхности.
17. Процессорная система по п. 11, в которой:
по меньшей мере одна из контурных линий является несвязанной по триангулированной поверхности; и
нормализатор потенциальной функции выполнен с возможностью сглаживания потенциальной функции посредством минимизации вариации величины градиента потенциальной функции.
18. Процессорная система по п. 11, в которой:
по меньшей мере одна из контурных линий является несвязанной по триангулированной поверхности; и
нормализатор потенциальной функции выполнен с возможностью распределения контурных линий по триангулированной поверхности посредством разделения аппроксимации поверхности на области вдоль контурных линий потенциальной функции таким образом, что все контурные линии в каждой области соединены.
19. Процессорная система по п. 11, в которой:
нормализатор потенциальной функции выполнен с возможностью применения масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия величины градиента вдоль каждой контурной линии в среднем эквивалентна ширине головки автоматизированной установки для укладки волокон.
20. Процессорная система по п. 11, в которой:
нормализатор потенциальной функции выполнен с возможностью применения масштабирующей функции к потенциальной функции для корректировки значений потенциальной функции таким образом, что инверсия минимальной величины градиента вдоль каждой контурной линии не превышает ширины головки автоматизированной установки для укладки волокон.
| Токарный резец | 1924 |
|
SU2016A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| КАССЕТА СРАЩИВАНИЯ ОПТИЧЕСКИХ ВОЛОКОН | 2012 |
|
RU2617879C2 |

