Изобретение относится к машиностроению, и в частности к одноподвижным вращательным кинематическим парам для подвижного соединения поворотных рычажных звеньев, применяемых для сборки замкнутых кинематических цепей механизмов в разных областях техники.
Известна вращательная кинематическая пара, в которой подвижное устройство рычажных звеньев выполнено в виде последовательно собираемых между собой в пространстве плавающих крестовин, содержащих перпендикулярно закрепленные между собой оси вращения с установленными на них концах вилками для образования кинематической связи между вращающими поворотными валами (авт. свид. СССР №250974 «Передаточный механизм с шарнирного Кардана» Бюл. Изобр. №27, 1969) - аналог.
Недостатками известного устройства кинематической пары является сложность конструкции и наличие мертвых неуправляемых положений из-за радиальных зазоров, требуемых для сборки и обеспечения подвижности всех вращательных соединений поворотных рычажных звеньев в замкнутой кинематической цепи.
Наиболее близким по технической сущности и достигаемому эффекту является вращательная кинематическая пара, содержащая подвижное кинематическое вращательное соединение рычажных звеньев, выполненное в виде радиально изогнутых и пересекающихся между собой при их сборке рычажных ползунов, установленных с радиальными и окружными зазорами в концентрические кольцевые позы (Патент South Korea №KR100334900 В1, опубликован 12.06.1996 г.) - прототип.
Недостатками указанного устройства вращательной кинематической пары являются:
1. Сложность конструкции и трудоемкость сборки
2. Наличие мертвых неуправляемых положений соединяемых рычажных звеньев из-за необходимых (для их сборки и их подвижности в кинематической цепи) зазоров в кинематических парах ограничивают кинематические возможности рычажного шарнирного механизма, сужают его рабочее пространство и увеличивают динамические нагрузки при реверсировании ведомого вала.
В работе Пожбелко В.И. «Возникновение переменной (изменяемой) структуры и расчет размеров области особых положений механизма с учетом зазоров и вырождения кинематических пар» (Санкт-Петербург: Изд-во СПбГПУ, журнал «Теория механизмов и машин», 2010. Том №8 (№2), с. 71-80) установлено, что зона таких мертвых положений прямо увеличивается с увеличением радиальных зазоров во вращательных кинематических парах механизма и, наоборот, может быть уменьшена до нуля при отсутствии таких зазоров в этих кинематических парах. При этом известные попытки применения для перехода через мертвые положения (возникающие из-за зазоров в парах) дополнительного комплекта зубчатых секторов (авт. свид. СССР №877176, Бюл. изобр. №40, 1981 г., Ярошенко В.П.) приводят к значительному усложнению конструкции шарнирного механизма, а также снижают надежность его работы из-за возникающих при реверсировании через мертвые положения динамических соударений зубчатых секторов.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и реализации беззазорной вращательной кинематической пары, например, для построения многозвенных шарнирных механизмов без мертвых неуправляемых положений с расширенным рабочим пространством и уменьшенными динамическими нагрузками при их реверсировании.
Получение технического результата достигается за счет того, что стержневая вращательная кинематическая пара содержит вращательное кинематическое соединение поворотных рычажных звеньев, которое выполнено в виде набора из двух круглых стержней, установленных несоосно со смещением их осей вращения между собой и расположенных внутри плавающего кольцевого элемента, образующая которого конгруэнтна наружной поверхности обоих круглых стержней при их контакте между собой.
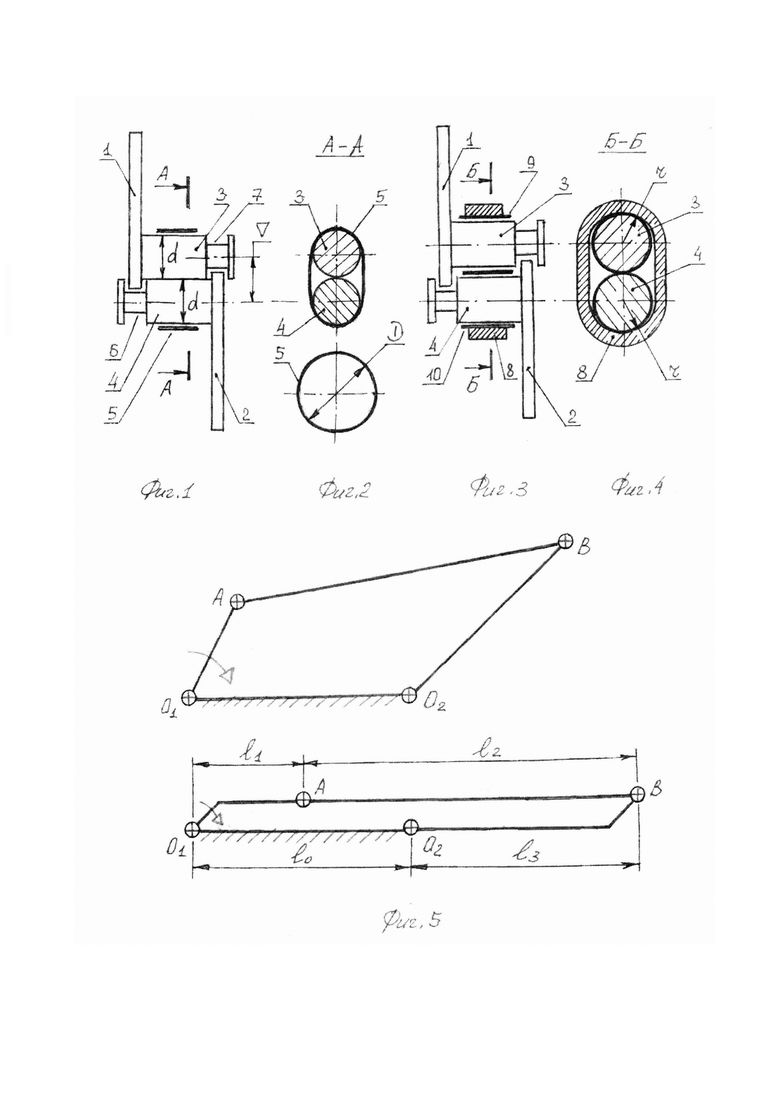
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4 и фиг. 5, где фиг. 2 содержит сечение А - А на фигуре 1, а фиг. 4 содержит сечение Б - Б на фигуре 3.
На фиг. 1 представлен общий вид предлагаемой стержневой вращательной кинематической пары, в которой подвижное вращательное устройство соединяемых рычажных звеньев 1 и 2, образующих между собой одноподвижное кинематическое соединение, выполнено в виде набора из двух круглых стержней 3 и 4 с параллельными осями вращения O1O2 и O3O4, установленных несоосно с параллельными смещением «∇» их осей вращения между собой (∇=d) и расположенных внутри плавающего кольцевого элемента 5 с внутренним диаметром D<2d, образующая которого конгруэнтна наружной поверхности обоих круглых стержней 3 и 4 при контакте между собой.
Подвижное устройство рычажных звеньев снабжено ограничителями относительного осевого перемещения, выполненными в виде расположенных на круглых стержнях кольцевых пазах 6 и 7, которые взаимодействуют с соединяемыми посредством кинематической пары рычажными звеньями 1 и 2.
Стержневая кинематическая пара на фиг. 1 содержит плавающий кольцевой элемент 5, выполненный в виде замкнутого тонкостенного упругого цилиндра, свободно установленного относительно соединяемых рычажных звеньев 1 и 2 с возможностью деформирования в процессе сборки его формы (начальная круглая конфигурация с внутренним диаметром D<2d до сборки переходит в вытянутую вокруг стержней 3 и 4 форму) при сборке подвижного устройства для образования беззазорной вращательной кинематической пары.
На фиг. 2 дано сечение А - А на фигуре 1.
На фиг. 3 и фиг. 4 показан вариант выполнения стержневой вращательной кинематической пары, в котором плавающий кольцевой элемент выполнен в виде трубы 8 с прямолинейными боковыми сторонами, соединенными между полукруглыми цилиндрическими поверхностями радиусом «r=d/2», образующая которых конгруэнтна наружной поверхности круглых стержней 3 и 4 для образования беззазорной вращательной кинематической пары, а круглые стержни 3 и 4 снабжены тонкостенными цилиндрическими вкладышами 9 и 10 из упругого полимерного материала.
На фиг. 5 представлен вариант выполнения замкнутой кинематической цепи шарнирного четырехзвенника О1АВO2, состоящего из кинематически связанных между собой (посредством беззазорных вращательных кинематических пар O1,А,В и O2) четырех рычажных звеньев в виде стойки длиной  установленного на ней ведущего рычажного звена длиной
установленного на ней ведущего рычажного звена длиной  шатуна длиной
шатуна длиной  ведомого рычажного звена длиной
ведомого рычажного звена длиной 
Стороны шарнирного четырехзвенника O1AВO2 на фиг. 5 выполнены со следующим соотношением длин его сторон:

для обеспечения полного поворота ведомого рычажного звена O2В на угол 360 градусов без возникновения его мертвых положений.
Технический результат, достигаемый при реализации предложений стержневой вращательной кинематической пары, заключается в упрощении конструкции вращательного кинематического соединения поворотных рычажных звеньев и реализации беззазорной стержневой вращательной кинематической пары, например, для построения многозвенных шарнирных механизмов без мертвых неуправляемых положений с расширенным рабочим пространством и уменьшенными динамическими нагрузками при их реверсировании (упрощение конструкции кинематического соединения и повышение его эксплуатационной эффективности в шарнирных механизмах).
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| МНОГОКРАТНЫЙ ЦИЛИНДРИЧЕСКИЙ ШАРНИР | 2021 |
|
RU2760497C1 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
Изобретение относится к машиностроению. Стержневая вращательная кинематическая пара содержит вращательное кинематическое соединение поворотных рычажных звеньев в виде набора из двух круглых стержней, установленных несоосно с параллельным смещением их осей вращения между собой и расположенных внутри плавающего кольцевого элемента, образующая которая конгруэнтна наружной поверхности обоих круглых стержней при их контакте между собой. Обеспечивается упрощение конструкции и повышение эксплуатационной эффективности шарнирных механизмов. 5 з.п. ф-лы, 5 ил.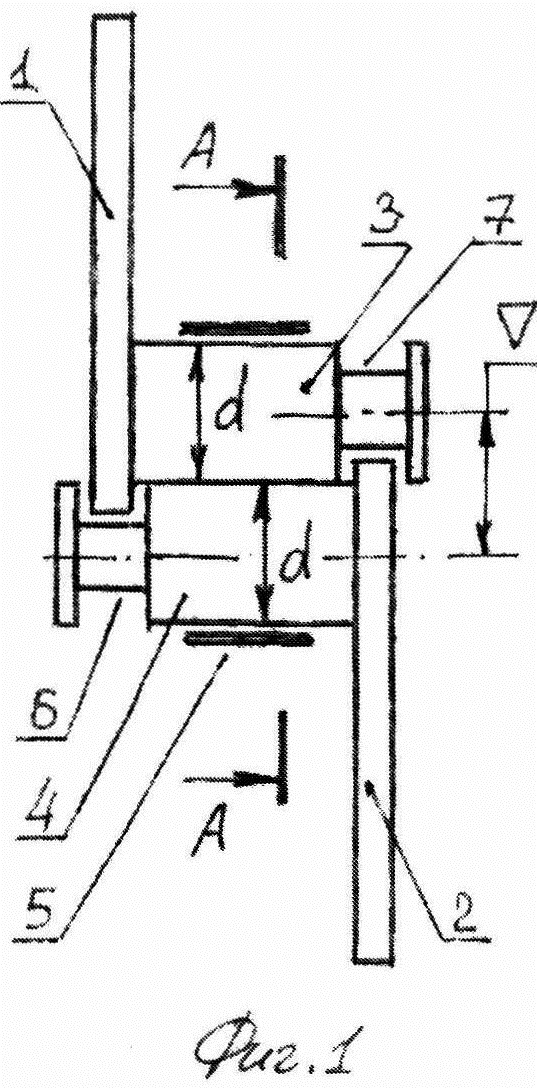
1. Стержневая вращательная кинематическая пара, содержащая подвижное устройство рычажных звеньев, образующих между собой одноподвижное кинематическое соединение с возможностью относительного вращательного движения соединяемых звеньев, отличающаяся тем, что подвижное устройство рычажных звеньев выполнено в виде набора из двух круглых стержней диаметром «d», установленных несоосно с параллельным смещением их осей вращения между собой и расположенных внутри плавающего кольцевого элемента с внутренним диаметром D≤2d, образующая которого конгруэнтна наружной поверхности обоих круглых стержней при их контакте между собой.
2. Стержневая вращательная кинематическая пара по п. 1, отличающаяся тем, что круглые стержни с параллельными осями вращения попарно сблокированы с поворотными соединительными рычагами для образования замкнутой кинематической цепи шарнирного рычажного механизма.
3. Стержневая вращательная кинематическая пара по п. 1, отличающаяся тем, что плавающий кольцевой элемент выполнен в виде замкнутого тонкостенного упругого цилиндра диаметром D<2d свободно установленного относительно соединяемых рычажных звеньев с возможностью деформирования его формы при сборке подвижного устройства для образования беззазорной вращательной кинематической пары.
4. Стержневая вращательная кинематическая пара по п. 1, отличающаяся тем, что круглые стержни с диаметром «d» с параллельными осями вращения снабжены тонкостенными вкладышами из упругого полимерного материала, а плавающий кольцевой элемент выполнен в виде трубы с прямолинейными боковыми сторонами, соединенными между собой полукруглыми с радиусом r=d/2 цилиндрическими поверхностями, образующая которых конгруэнтна наружной поверхности упомянутых круглых стержней диаметром «d» для образования беззазорной вращательной кинематической пары.
5. Стержневая вращательная кинематическая пара по п. 1, отличающаяся тем, что подвижное устройство рычажных звеньев снабжено ограничителями относительного осевого перемещения, выполненными в виде расположенных на круглых стержнях кольцевых пазов, которые взаимодействуют с соединяемыми посредством кинематической пары рычажными звеньями.
6. Стержневая вращательная кинематическая пара по пп. 2-4, отличающаяся тем, что рычажный механизм выполнен в виде шарнирного четырехзвенника, включающего кинематически связанные между собой посредством беззазорных стержневых вращательных кинематических пар стойку, ведущее рычажное звено, шатун и ведомое рычажное звено, в котором сумма расстояния  между осями вращения на ведущем рычажном звене и расстояния
между осями вращения на ведущем рычажном звене и расстояния  между осями вращения на шатуне выполнена равной сумме расстояния
между осями вращения на шатуне выполнена равной сумме расстояния  между осями вращения на стойке и расстояния
между осями вращения на стойке и расстояния  между осями вращения на ведомом рычажном звене для реализации соотношений между ними вида:
между осями вращения на ведомом рычажном звене для реализации соотношений между ними вида:

необходимых для обеспечения полного поворота ведомого рычажного звена на 360 градусов без возникновения его мертвых положений.
| KR 100334900 B1, 02.05.2002 | |||
| ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ ЛОКОМОТИВАвсач)юзйдяin nATEhmiO- «., " К.ХИЙЧЕС1:АЯ ^^ БИБЛИОТЕКА; | 0 |
|
SU250974A1 |
| US 9316266 B2, 19.04.2016. | |||

