Изобретение относится к спутниковым технологиям определения местоположения и обработке радионавигационных сигналов
Наиболее близким к предлагаемому изобретению является многосигнальная система фазовой автоподстройки, описанная в журнале радиотехника №7 - М.: Радиотехника, 2013, с. 507, рис. 13. 14 Харисов В.Н., Кушнир А.А. и содержащая m параллельно работающих индивидуальных фазовых автоподстроек (ФАП) первого порядка, в которых оцениваются индивидуальные составляющие фаз, общий контур, в котором оцениваются общие для всех сигналов составляющие фаз сигналов, и блок расчета коэффициентов следящего фильтра.
Каждый блок индивидуальной ФАП содержит фазовый дискриминатор, следящий фильтр за индивидуальной составляющей фазы и управляемый генератор опорного сигнала. На вход управляемого опорного генератора поступают приращения фаз  , определяемые как проекции оценок приращений вектора
, определяемые как проекции оценок приращений вектора  на линию визирования, и приращения фаз
на линию визирования, и приращения фаз  определяемые по значениям доплеровского сдвига частоты, возникающего из-за движения космического аппарата, и вычисляемое по данным эфемерид в блоке вторичной обработки. В блоке расчета коэффициентов следящего фильтра решается уравнение Риккати для получения значений корреляционной матрицы ошибок
определяемые по значениям доплеровского сдвига частоты, возникающего из-за движения космического аппарата, и вычисляемое по данным эфемерид в блоке вторичной обработки. В блоке расчета коэффициентов следящего фильтра решается уравнение Риккати для получения значений корреляционной матрицы ошибок  для вектора
для вектора  размерностью 11×1 и R0 размерностью единица.
размерностью 11×1 и R0 размерностью единица.
Недостатком такой многосигнальной системы фазовой автоподстройки является: блок расчета коэффициентов следящего фильтра, имеющий максимальную размерность матриц 11×11, обусловленную размерностью вектора х. Индивидуальная ФАП имеет первый порядок и обладает низкой помехоустойчивостью.
Техническим результатом изобретения является повышение помехоустойчивости системы слежения за фазами сигналов спутниковых навигационных систем излучаемых, как одним навигационным космическим аппаратом (НКА) на одной или на разных несущих частотах, так несколькими НКА, повышение точности измерения фаз сигналов, снижение трудоемкости расчета коэффициентов следящих фильтров.
Указанный технический результат достигается тем, что в известной многосигнальной системе фазовой автоподстройки частоты, содержащей УП индивидуальных идентичных контуров слежения за фазами принимаемых сигналов, с возможностью оценки индивидуальных составляющих фаз, каждый из контуров состоит из последовательно соединенных фазового дискриминатора, следящего фильтра, управляемого генератора опорного сигнала, на вход которого поступают приращения фаз, общий контур, с возможностью оценки общих для всех сигналов составляющих фаз, приращений сигналов и блок расчета коэффициентов следящего фильтр с возможностью получения значений корреляционной матрицы ошибок, при этом блок расчета коэффициентов следящего фильтра выполнен с возможностью расчета раздельно коэффициентов корреляционных матриц ошибок по вектору x и по вектору Δ, и пересчет ошибок к полному вектору оценивания; с возможностью расчета коэффициентов индивидуальных контуров  размерностью 2×2, каждый индивидуальный контур выполнен с возможностью получения m оценок фаз сигналов
размерностью 2×2, каждый индивидуальный контур выполнен с возможностью получения m оценок фаз сигналов  общий контур выполнен с возможностью формирования вектора приращений по фазам
общий контур выполнен с возможностью формирования вектора приращений по фазам  связанными с оценкой приращения координат потребителя
связанными с оценкой приращения координат потребителя  и вектора приращений по фазе
и вектора приращений по фазе  пропорционального оценке вектора скорости потребителя.
пропорционального оценке вектора скорости потребителя.
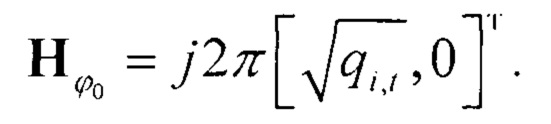
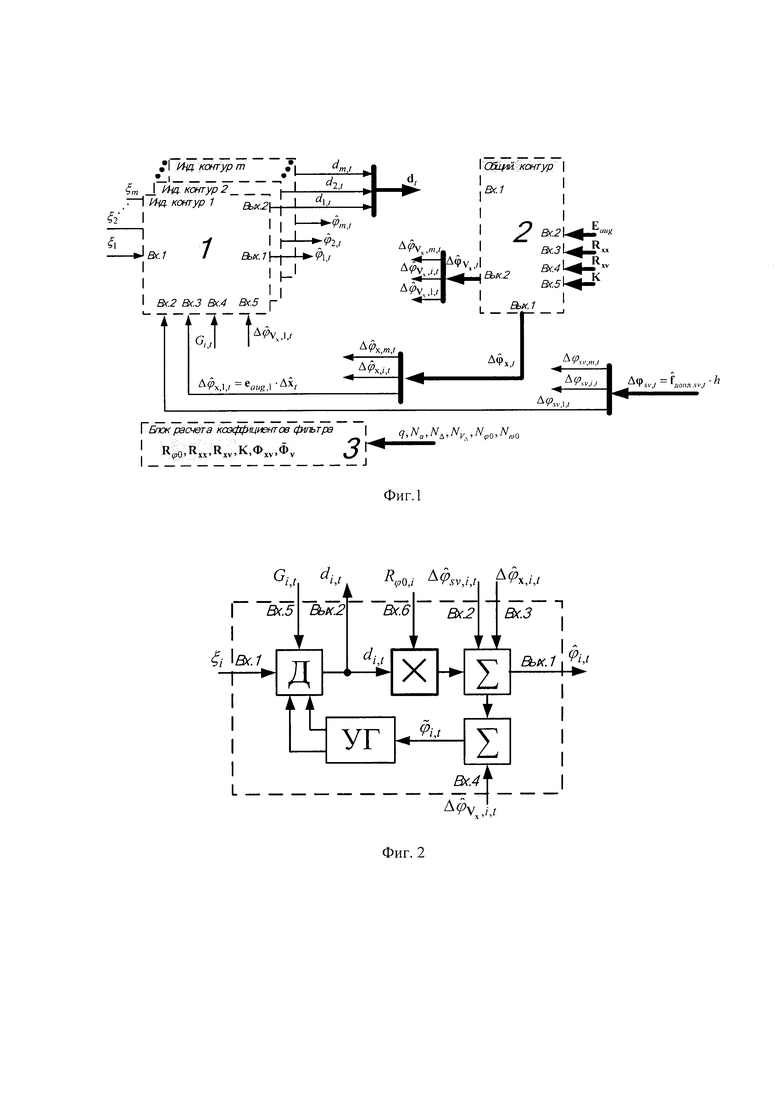
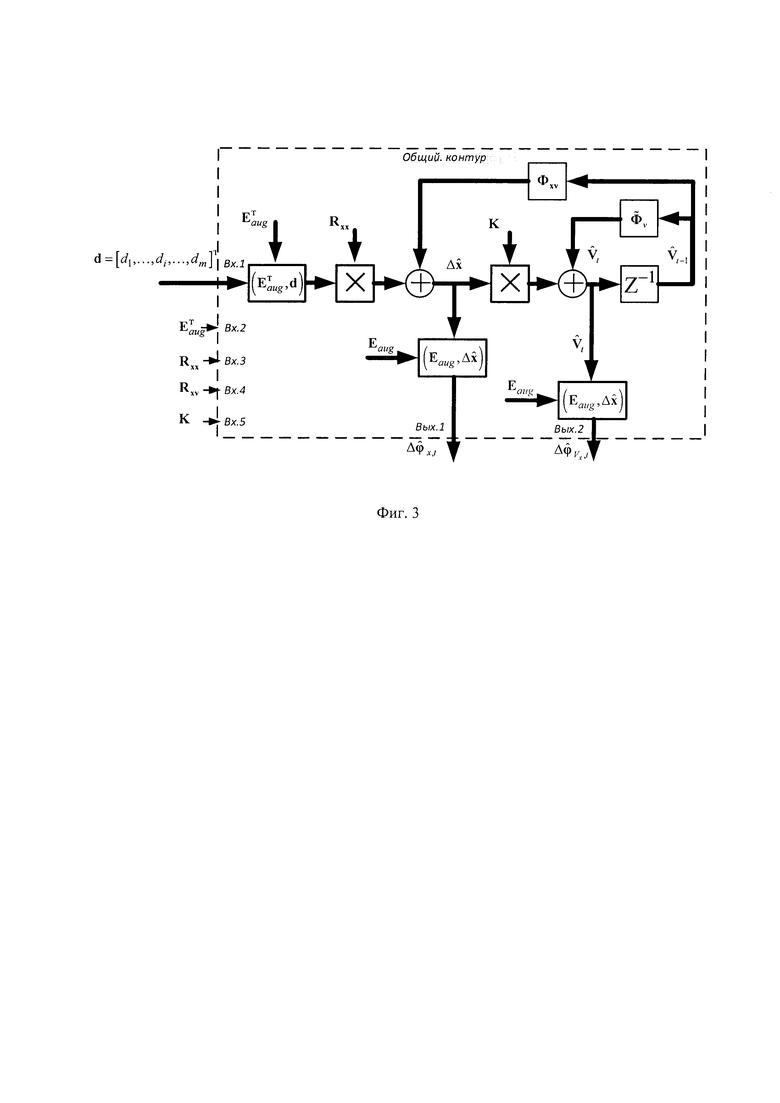
Сущность предлагаемой многосигнальной системы фазовой автоподстройки (МФАП) поясняется структурными схемами, представленными на фигурах. Указанные фигуры не охватывают и тем более не ограничивают весь объем притязаний данного решения, а являются лишь иллюстрирующим материалом для частного случая исполнения, где на фиг. 1 представлена структурная схема МФАП; фиг. 2 - схема индивидуального контура; фиг. 3 - схема общего контура.
МФАП (фиг. 1) содержит УП индивидуальных контуров 1 слежения за фазами сигналов (соответствует числу принимаемых сигналов), общего контура 2 слежения за приращением вектора, пропорционального общей составляющей фазы  , и блока 3 расчета коэффициентов фильтра.
, и блока 3 расчета коэффициентов фильтра.
Многосигнальная система фазовой автоподстройки работает следующим образом. На вход МФАП поступает совокупность оцифрованных отсчетов  принимаемых сигналов, имеющие YYI компонент
принимаемых сигналов, имеющие YYI компонент  где
где  - отношение сигнал-шум.
- отношение сигнал-шум.
На выходе 2 каждого индивидуального контура 1 (фиг. 2) формируются процесс di,t, пропорциональный величине рассогласования входного и опорного сигналов. На выходе 1 каждого индивидуального контура 1 формируется оценка фазы, соответствующая принимаемому сигналу. На входы 2, 3 и 4, из общего контура, поступают оценки приращений фаз 
 , соответственно.
, соответственно.
В общем контуре (фиг. 3) формируется вектор приращений по фазам  связанными с оценкой приращения координат потребителя
связанными с оценкой приращения координат потребителя  и вектор приращений по фазе
и вектор приращений по фазе  пропорциональный оценке вектора скорости потребителя, которые используются для управления генераторами сигналов всех частот.
пропорциональный оценке вектора скорости потребителя, которые используются для управления генераторами сигналов всех частот.
Блок расчета коэффициентов следящего фильтра выполнен с возможностью расчета коэффициентов для вектора  и вектора
и вектора  меньшей размерности, 9×1 и 2×1 соответственно,
меньшей размерности, 9×1 и 2×1 соответственно,
где x, y, z - координаты потребителя,
Vx,Vy,Vz - компоненты скорости потребителя,
a x, ay, az - компоненты ускорения потребителя,
Δ - смещение часов потребителя (опорного генератора),
VΔ - скорость ухода часов.
Сущность работы предлагаемой многосигнальной системы фазовой автоподстройки (МФАП) заключается в получении m оценок фаз сигналов  при приеме m сигналов от нескольких или одного НКА, в том числе на разных несущих частотах и квадратурах сигнала.
при приеме m сигналов от нескольких или одного НКА, в том числе на разных несущих частотах и квадратурах сигнала.
Значение оценок вектора фаз  и оценок вектора скорости
и оценок вектора скорости  можно определить из системы выражений
можно определить из системы выражений




где  - расширенная матрица направляющих косинусов,
- расширенная матрица направляющих косинусов,
ei - матрица направляющих косинусов i-го сигнала;
с=299 792 458 м/с - скорости света;
 - вектор доплеровских сдвигов частот, возникающих за счет движения НКА, и определяемых по данным эфемерид,
- вектор доплеровских сдвигов частот, возникающих за счет движения НКА, и определяемых по данным эфемерид,
 - вектор радиальных скоростей НКА,
- вектор радиальных скоростей НКА,
 - вектор несущих частот сигналов НКА,
- вектор несущих частот сигналов НКА,
diag{…} - операция формирования диагональной матрицы,
Rxx - вектор коэффициентов следящего фильтра,
h - интервал интегрирования,
 - вектор выходов дискриминаторов, значения которых описываются выражением
- вектор выходов дискриминаторов, значения которых описываются выражением
где ξi - сигнал НКА на i-м входе дискриминатора,
 - экстраполированное значение фазы i-го сигнала на шаг h,
- экстраполированное значение фазы i-го сигнала на шаг h,
 - операция выделения мнимой части.
- операция выделения мнимой части.
 - матрица преобразования в дискретном времени
- матрица преобразования в дискретном времени
В блоке расчета коэффициентов следящего фильтра выполняется расчет корреляционных матриц ошибок Rxx, Rxv и Rϕ0 итерационным методом. Порядок расчета разбит на 6 этапов:
Этап 1. Задать исходные данные:
q - значение отношения сигнал-шум в отсчете коррелятора;
Na - спектральная плотность формирующего шума ускорения потребителя;
NΔ - спектральная плотность формирующего шума смещения часов потребителя (опорного генератора) Δ;
 - спектральная плотность формирующего шума скорости ухода часов VΔ потребителя;
- спектральная плотность формирующего шума скорости ухода часов VΔ потребителя;
 - спектральная плотность формирующего шума индивидуальной фазы;
- спектральная плотность формирующего шума индивидуальной фазы;
 - спектральная плотность формирующего шума частоты индивидуальной ФАП.
- спектральная плотность формирующего шума частоты индивидуальной ФАП.
Этап 2. Определить значения корреляционной матрицы  решая систему уравнений с начальными условиями
решая систему уравнений с начальными условиями 

где 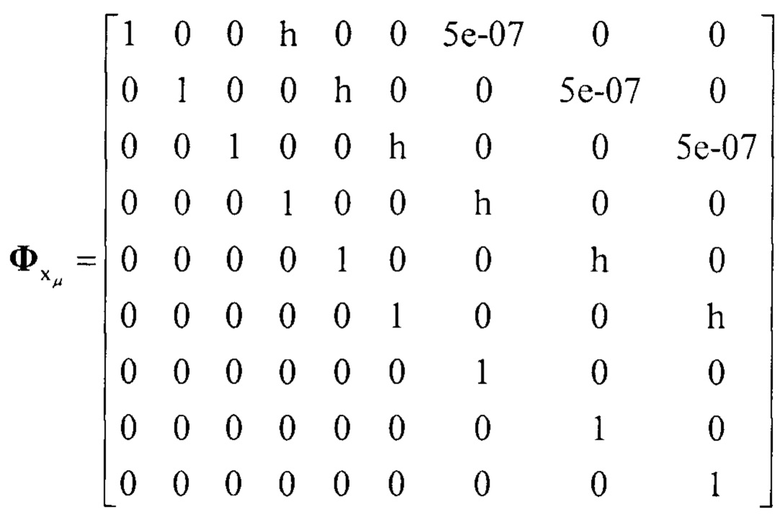 - матрица экстраполяции вектора x,
- матрица экстраполяции вектора x,
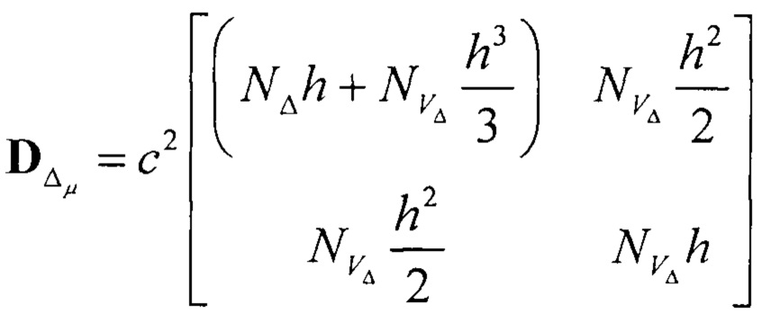
 - матрица дисперсий формирующих шумов,
- матрица дисперсий формирующих шумов,
 - матрица наблюдений по вектору x
- матрица наблюдений по вектору x
Этап 3. Определить значения корреляционной матрицы 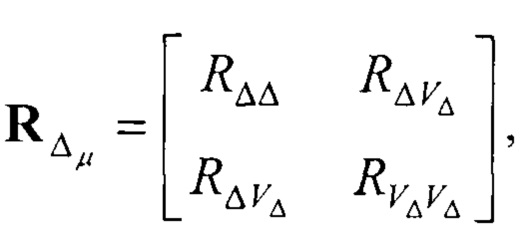 решая систему уравнений с начальными условиями
решая систему уравнений с начальными условиями  :
:

где  - матрица экстраполяции вектора Δ,
- матрица экстраполяции вектора Δ,
 - матрица наблюдений по вектору Δ.
- матрица наблюдений по вектору Δ.
Этап 4. Определить значения корреляционной матрицы ошибок  для вектора
для вектора  выполняя пересчет значений корреляционных матриц ошибок
выполняя пересчет значений корреляционных матриц ошибок  и
и  используя преобразование
используя преобразование

где 
Этап 5. Сформировать корреляционную матрицу ошибок  по вектору
по вектору  выполнив перестановку элементов матрицы
выполнив перестановку элементов матрицы  в порядке
в порядке 

Этап 6. Определить значения корреляционной матрицы ошибок
 - вектор коэффициентов индивидуальных контуров
- вектор коэффициентов индивидуальных контуров
где  матрицы
матрицы  , решая систему уравнений с начальными условиями
, решая систему уравнений с начальными условиями  :
:

где 
Таким образом, m идентичных индивидуальных контуров являются ФАП второго порядка и обладают повышенной помехоустойчивостью.
Использование изобретения позволяет повысить помехоустойчивость и точность измерения фаз сигналов системы фазовой автоподстройки частоты пропорционально числу принимаемых сигналов, как при приеме сигналов от разных НКА, на разных или на одной несущей, так и при приеме сигналов от одного НКА.
Изобретение относится к спутниковым технологиям определения местоположения и обработке радионавигационных сигналов. Техническим результатом изобретения является повышение помехоустойчивости системы слежения за фазами сигналов спутниковых навигационных систем, излучаемых как одним навигационным космическим аппаратом (НКА) на одной или на разных несущих частотах, так и несколькими НКА, повышение точности измерения фаз сигналов, снижение трудоемкости расчета коэффициентов следящих фильтров. Заявленная многосигнальная система фазовой автоподстройки содержит m индивидуальных контуров слежения за фазами принимаемых сигналов, общий контур и блок расчета коэффициентов следящего фильтра, выполненный с возможностью расчета коэффициентов корреляционных матриц ошибок и пересчета ошибок к полному вектору оценивания. При этом система выполнена с возможностью расчета коэффициентов индивидуальных контуров размерностью 2×2, каждый индивидуальный контур выполнен с возможностью получения m оценок фаз сигналов. 3 ил.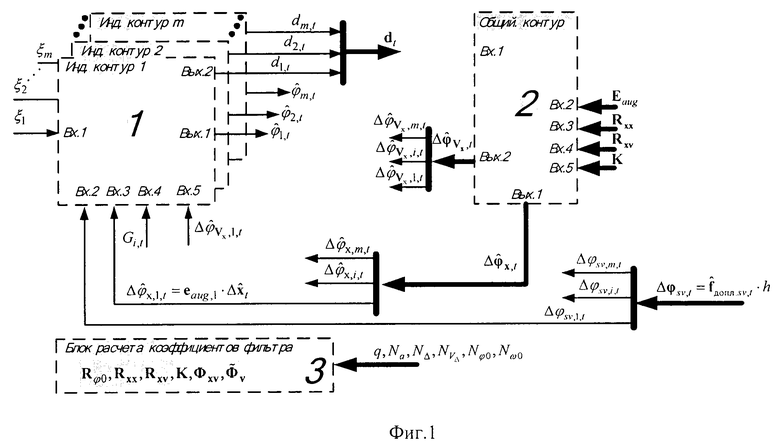
Многосигнальная система фазовой автоподстройки, содержащая m индивидуальных контуров слежения за фазами принимаемых сигналов, с возможностью оценки индивидуальных составляющих фаз, каждый из которых состоит из последовательно соединенных фазового дискриминатора, следящего фильтра, управляемого генератора опорного сигнала, на вход которого поступают приращения фаз, общий контур слежения с возможностью оценки общих для всех сигналов составляющих фаз, приращений фаз сигналов и блок расчета коэффициентов следящего фильтра с возможностью получения значений корреляционной матрицы ошибок, отличающаяся тем, что
блок расчета коэффициентов следящего фильтра выполнен с возможностью расчета раздельно коэффициентов корреляционных матриц ошибок по вектору  и вектору
и вектору  меньшей размерности, 9×1 и 2×1 соответственно,
меньшей размерности, 9×1 и 2×1 соответственно,
где x, y, z - координаты потребителя,
Vx, Vy, Vz - компоненты скорости потребителя,
ax, ay, az - компоненты ускорения потребителя,
Δ - смещение часов потребителя (опорного генератора),
VΔ - скорость ухода часов;
и пересчет ошибок к полному вектору оценивания; с возможностью расчета коэффициентов индивидуальных контуров  размерностью 2×2,
размерностью 2×2,
где Rϕ0 - коэффициент корреляции по фазе в индивидуальном контуре,
Rϕω - коэффициент взаимной корреляции по фазе и частоте в индивидуальном контуре,
Rω0 - коэффициент корреляции по частоте в индивидуальном контуре;
каждый индивидуальный контур слежения за фазами сигналов выполнен с возможностью получения m оценок фаз сигналов  ,
,
где  - оценка фазы на выходе первого индивидуального контура,
- оценка фазы на выходе первого индивидуального контура,
ϕi,t - оценка фазы на выходе i-го индивидуального контура,
ϕm,t - оценка фазы на выходе m-го индивидуального контура;
и общий контур слежения за приращением вектора, пропорционального общей составляющей фазы  ,
,
где eaug,i,t - расширенная матрица направляющих косинусов,
 - оценка приращения координат потребителя,
- оценка приращения координат потребителя,
и вектора приращений по фазе  , пропорционального оценке вектора скорости потребителя.
, пропорционального оценке вектора скорости потребителя.
| ЦИФРОВАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2010 |
|
RU2431917C1 |
| КРАН ПОРТАЛЬНОГО ТИПА | 0 |
|
SU193699A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ ОТКЛОНЕНИЯ ФАЗЫ НЕСУЩЕЙ В ХОДЕ ПРИЕМА РАДИОНАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2584139C2 |
| СПОСОБ АВТОПОДСТРОЙКИ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2168267C2 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| ЦИФРОВАЯ СИСТЕМА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ (ВАРИАНТЫ) | 2008 |
|
RU2383991C2 |
| Прибор для нарезки сучильных рукавов кардочесальных машин | 1937 |
|
SU57073A1 |
| US 2011285588 A1, 24.11.2011 | |||
| CN 111431525 A, 17.07.2020. | |||
