Изобретение относится к испытанию и техническому диагностированию машин, в частности к способам статической поверки динамометров для тяговых испытаний мобильных машин, причем таких динамометров, которые оснащены тензометрическими и другими недеформируемыми датчиками. Кроме того, оно может быть использовано в машиностроении при выпуске из производства портативных испытательных приборов, в качестве образцовых динамометров в которых используются пружины сжатия.
Проверка динамометров на работоспособность и погрешность измерений перед тяговыми испытаниями машин и в процессе их испытаний являются основными условиями обеспечения требуемой точности и достоверности испытаний. Известен способ испытания динамометра, при котором его нагружают и при этом измеряют деформацию индикатором часового типа, показания которого в определенном масштабе соответствуют величине приложенной к динамометру нагрузки (Лихачев В.С. Испытания тракторов: учеб. пособие для вузов / В.С. Лихачев. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1974. - 288 с., С. 157-161) [1].
Основным недостатком указанного способа является то, что он мало применим в устройствах для проверки динамометров для тяговых испытаний машин.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ проверки динамометра на погрешность, при котором проверяемый и образцовый динамометры последовательно включают в одну силовую цепь и нагружают их, при этом фиксируют деформацию, пропорциональную величине приложенной к динамометру нагрузки (Лихачев В.С. Испытания тракторов: учеб. пособие для вузов / В.С. Лихачев. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1974. - 288 с., С. 157-161) [2].
Недостатком названного способа является то, что для его реализации требуется сложная и громоздкая установка, применение которой в условиях, приближенных к полевым, не представляется возможным.
Задача изобретения: обеспечение возможности создания и использования простого портативного прибора для поверки тяговых динамометров.
Сущность изобретения заключается в следующем. Нагружение поверяемого и образцового динамометров осуществляют винтовым механизмом, посредством навинчивания гайки на натяжной винт. Диапазон нагрузок, соответствующий диапазону измерений поверяемого динамометра, разбивают на несколько ступеней путем его пересчета в соответствующее целое число оборотов гайки вокруг ее оси вращения по формуле
где nm - целое число оборотов гайки вокруг ее оси вращения, соответствующее нагрузке одной ступени; FВПИ - верхний предел измерений поверяемого динамометра; m - принятое число ступеней, S - шаг резьбы гайки; К - коэффициент жесткости пружины. Затем производят испытания динамометров в режиме «нагрузка-разгрузка» по каждой выбранной ступени, принимая во внимание целое число оборотов гайки вокруг ее оси вращения, соответствующее нагрузке одной ступени, а также число ступеней. При этом учитывают шаг резьбы и жесткость пружины образцового динамометра. После чего фиксируют показания поверяемого динамометра, затем вычисляют силу, приложенную к поверяемому динамометру, по формуле
где FЗi - заданная силовая нагрузка на поверяемый динамометр по i-ступени; Ni - порядковый номер i-ступени. После чего вычисляют вариации по формулам:
где Δji - абсолютная вариация при j-измерении (опыте) по i-ступени; FПji - показания поверяемого динамометра при j-измерении по i-ступени; δji - относительная вариация при j-измерении по i-ступени. В завершение из полученных данных выбирают максимальные значения абсолютной и относительной вариации и принимают их за предельную погрешность однократного измерения силы поверяемым динамометром. В совокупности это обеспечит возможность создания и использования простого портативного прибора для поверки тяговых динамометров.
Покажем правомерность формул, положенных в основу предложенного способа поверки динамометра.
В соответствии с законом Гука [3]

где F - сила, действующая на пружину сжатия в осевом направлении; К - коэффициент упругости (жесткости) пружины;  - изменение длины пружины (продольная деформация). Выразим
- изменение длины пружины (продольная деформация). Выразим  по формуле
по формуле

где n - число витков резьбы натяжного винта, на которые навинчена гайка, что соответствует числу оборотов гайки вокруг ее оси вращения; S - шаг резьбы.
Подставив (2) в (1), получим

Отсюда - из (3) -

Так как испытания проводят по ступеням, то силовая нагрузка одной ступени Fm при известном числе ступеней m может быть вычислена по формуле

где FВПИ - верхний предел измерений поверяемого динамометра.
Теперь подставим (5) в (4) и получим искомую формулу

где nm - целое число оборотов гайки вокруг ее оси вращения, соответствующее нагрузке одной ступени.
Для нахождения силы, приложенной к поверяемому динамометру, поступим следующим образом. Выразим n в (3) -

где Ni - порядковый номер i-ступени. После подстановки (7) в (3) искомая формула примет вид:

где FЗi - заданная силовая нагрузка на поверяемый динамометр по i-ступени; Ni - порядковый номер i-ступени.
Практическое применение способа статической поверки тягового динамометра покажем на примере. Пусть имеется портативный прибор для испытания динамометров, оснащенный винтовым механизмом и цилиндрической пружиной сжатия. Его технические характеристики: S=2,5 мм, К=190 Н/мм. Требуется провести поверку тензометрического динамометра с ВПИ - FВПИ=25000 Н.
Решение и порядок выполнения поверки.
1. Принимают: m=5 (принято для примера).
2. Вычисляют nm по формуле (6) -

3. Округляют nm до целого числа: nm=11.
4. Вычисляют FЗi по формуле (8):
для первой ступени -

для второй ступени -

для третьей ступени -

5. Проводят испытания.
5.1. Навинчивая гайку на винт, сначала выбирают зазоры в винтовом механизме, а затем устанавливают ноль по способу «после разгрузки», при котором несколько нагружают поверяемый динамометр, затем плавно разгружают до нуля, что контролируют по показаниям поверяемого динамометра.
5.2. Проводят первый опыт в следующем порядке. Посредством ключа или рукоятки навинчивают гайку на винт. Выполнив 11 оборотов гайки вокруг ее оси вращения, фиксируют показание поверяемого динамометра и заносят в таблицу (результат: 5010 Н). Затем нагрузку снова увеличивают до следующей (второй) ступени - навинчивают гайку еще на 11 оборотов и записывают результат (10870 Н) и так далее до наибольшей нагрузки. Для краткости изложения материала в нашем примере (в таблице) представлено только три первых ступени. При достижении наибольшей нагрузки (14950 Н, что относится к третьей ступени) динамометр несколько перегружают, например, навинчивают гайку на винт еще на 3 оборота. После этого настолько же оборотов гайку свинчивают, фиксируют показания динамометра (результат: 16405 Н). Затем свинчивают гайку на 11 оборотов (результат: 10910 Н), то есть в обратном порядке плавно производят ступенчатую разгрузку и фиксируют показания поверяемого динамометра. Еще свинчивают гайку на 11 оборотов - результат: 5475 Н.
Далее аналогичным образом выполняют второй и третий опыты. Полученные результаты также показаны в таблице. Результаты (порядок цифр): по второму опыту - 5000, 10850, 15000, 16360, 10970, 5525; по третьему опыту-4980, 10880, 14900, 16465, 11030, 5545.
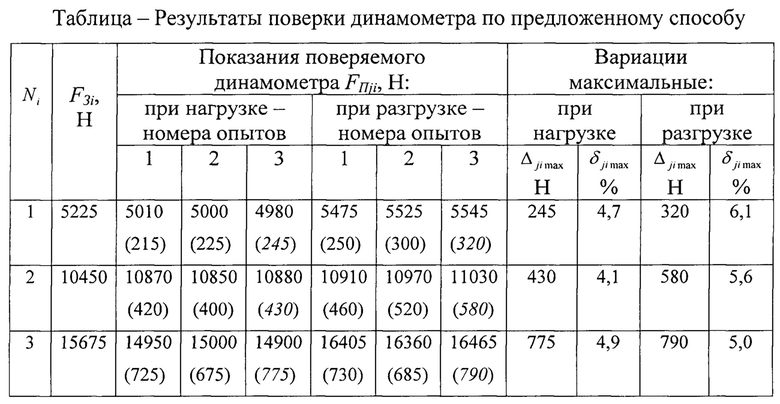
6. Для каждого полученного показания поверяемого динамометра вычисляют абсолютные вариации по формуле (их значения в таблице даны в скобках - в графе «Показания поверяемого динамометра»)
Например, по первому опыту при нагрузке

7. Из всех опытов каждой ступени выбирают абсолютные вариации, имеющие максимальные значения Δjimах, как при нагрузке, так и разгрузке (в таблице они помечены курсивом).
8. Принимая во внимание Δjimах, вычисляют максимальные относительные вариации по формуле
Например, по первому опыту при нагрузке Δjimax=245 Н -

В завершение из полученных данных выбирают максимальные значения абсолютной и относительной вариации и принимают их за предельную погрешность однократного измерения силы поверяемым динамометром.
Таким образом, предложен способ статической поверки тягового динамометра, в основу которого положены сравнительные испытания поверяемого динамометра с образцовым, которым является пружина сжатия с заранее известной жесткостью. При этом нагружение пружины осуществляется винтовым механизмом - посредством гайки, навинчиваемой на винт. В совокупности это позволяет обеспечить возможность создания и использования простого портативного прибора для поверки тяговых динамометров.
ИСТОЧНИКИ ИНФОРМАЦИИ, ПРИНЯТЫЕ ВО ВНИМАНИЕ
1. Лихачев В.С. Испытания тракторов: учеб. пособие для вузов / В.С. Лихачев. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1974. - 288 с., С.157-161.
2. Лихачев В.С. Испытания тракторов: учеб. пособие для вузов / В.С. Лихачев. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1974. - 288 с., С.157-161. - прототип.
3. Трофимова Т.И. Курс физики: учеб. пособие для вузов / Т.И. Трофимова. - М.: Высш. шк., 1997. - 542 с., С.43-44.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ДИНАМОМЕТРОВ ДЛЯ ТЯГОВЫХ ИСПЫТАНИЙ МАШИН | 2020 |
|
RU2747090C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГОВОЙ МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ЕГО ИСПЫТАНИИ В ТЯГОВОМ РЕЖИМЕ ТРОГАНИЯ С МЕСТА | 2009 |
|
RU2430339C2 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ СИЛОИЗМЕРИТЕЛЬНАЯ ОБРАЗЦОВАЯ | 1997 |
|
RU2122715C1 |
| Установка для поверки динамометров | 1976 |
|
SU645043A1 |
| Динамометр и способ его поверки | 1986 |
|
SU1383123A1 |
| Способ поверки силоизмерительных преобразователей и устройство для его реализации | 1977 |
|
SU735942A1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) ОБРАЗЦОВАЯ РАБОЧАЯ ГИДРАВЛИЧЕСКАЯ | 2010 |
|
RU2431123C1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОЙ МОЩНОСТИ ДВИГАТЕЛЯ ТРАНСПОРТНОЙ МАШИНЫ ПРИ ЕЁ ИСПЫТАНИИ В ТЯГОВОМ РЕЖИМЕ ТРОГАНИЯ С МЕСТА | 2009 |
|
RU2430340C2 |
| Способ задания образцовых сил больших и харитонова и образцовая силозадающая установка для его реализации | 1974 |
|
SU657290A1 |
Изобретение относится к способам статической поверки динамометров для тяговых испытаний мобильных машин. Предлагается способ статической поверки тягового динамометра, в основу которого положены сравнительные испытания поверяемого динамометра с образцовым, которым является пружина сжатия с заранее известной жесткостью. При этом нагружение пружины осуществляется винтовым механизмом посредством гайки, навинчиваемой на винт. Для определения деформации фиксируют число оборотов гайки вокруг ее оси вращения, а также учитывают шаг резьбы и жесткость пружины образцового динамометра. Одновременно с этим фиксируют показания поверяемого динамометра. Достигается обеспечение возможности создания и использования простого портативного прибора для поверки тяговых динамометров. 1 табл.
Способ статической поверки тягового динамометра, при котором проверяемый и образцовый динамометры включают последовательно в одну силовую цепь, оказывают на них силовое воздействие и при этом фиксируют деформацию, пропорциональную величине приложенной к динамометрам нагрузки, для этого предварительно диапазон нагрузок, соответствующий диапазону измерений поверяемого динамометра, разбивают на несколько ступеней, затем производят испытания динамометров в режиме «нагрузка-разгрузка» по каждой выбранной ступени, по полученным данным определяют устойчивость показаний поверяемого динамометра, которую оценивают разбросом результатов измерений - наибольшей разностью - вариациями между отдельными показаниями опыта, повторяемого несколько раз при нагрузке или при разгрузке, причем в зависимости от того, в каком случае эта разность больше для данной ступени, в завершение вычисляют вариации в абсолютном исчислении и в процентах относительно номинальной нагрузки, которые характеризуют предельную погрешность однократного измерения, отличающийся тем, что нагружение динамометров осуществляют винтовым механизмом посредством навинчивания гайки на натяжной винт, диапазон нагрузок, соответствующий диапазону измерений поверяемого динамометра, разбивают на несколько ступеней путем его пересчета в соответствующее целое число оборотов гайки вокруг ее оси вращения по формуле
где nm - целое число оборотов гайки вокруг ее оси вращения, соответствующее нагрузке одной ступени, FВПИ - верхний предел измерений поверяемого динамометра, m - принятое число ступеней, К - коэффициент жесткости пружины, S - шаг резьбы гайки, затем производят испытания динамометров в режиме «нагрузка-разгрузка» по каждой выбранной ступени, принимая во внимание целое число оборотов гайки вокруг ее оси вращения, соответствующее нагрузке одной ступени, а также число ступеней, при этом учитывают шаг резьбы и жесткость пружины образцового динамометра, после чего фиксируют показания поверяемого динамометра, затем вычисляют силу, приложенную к поверяемому динамометру, по формуле
где FЗi - заданная силовая нагрузка на поверяемый динамометр по i-ступени, Ni - порядковый номер i-ступени, после чего вычисляют вариации по формулам
где Δji - абсолютная вариация при j-измерении по i-ступени, FПji - показания поверяемого динамометра при j-измерении по i-ступени, δji - относительная вариация при j-измерении по i-ступени, в завершение из полученных данных выбирают максимальные значения абсолютной и относительной вариаций и принимают их за предельную погрешность однократного измерения силы поверяемым динамометром.
| Устройство динамической тарировки динамометров | 1979 |
|
SU773467A1 |
| Устройство для тарировки и проверки динамометрических приборов | 1974 |
|
SU493685A1 |
| Устройство для поверки динамометров и силоизмерительных датчиков | 1982 |
|
SU1064174A2 |
| CN 209656205 U, 19.11.2019. | |||

