Данное изобретение относится к устройствам для выполнения производственных операций, такого типа, которые содержат:
- по меньшей мере, одну инструментальную головку, имеющую инструмент,
- по меньшей мере, один датчик, связанный с упомянутой инструментальной головкой и выполненный с возможностью детектирования рабочего параметра инструментальной головки, и
- блок управления для управления работой упомянутой инструментальной головки.
В данном описании и в прилагаемой формуле изобретения термин "инструментальная головка" используется для обозначения инструментальной головки, предназначенной для выполнения любой производственной операции, например, операции зажима или операция сварки, например, электрической точечной сварки, или лазерной сварки, или даже только для операции перемещения детали с помощью захватного инструмента. Термин "инструмент" используется для обозначения любого инструмента или устройства, используемого в инструментальной головке, например, зажимного ролика, или пары электродов для электросварки, или оптического устройства для фокусировки лазерного луча, или захватного инструмента.
В целом изобретение применимо к любому устройству, которое предусматривает использование инструментальной головки для выполнения производственных операций. В соответствии с предпочтительным применением изобретение относится к устройствам, в которых инструментальная головка содержится в роботе, в частности, в многоосном промышленном роботе такого типа, который включает опорную конструкцию, запястье шарнирного робота, к которому съемным образом присоединена инструментальная головка, а также цепочку шарнирно соединенных друг с другом элементов робота, которая соединяет опорную конструкцию робота с запястьем робота. В конкретном примере содержащаяся в роботе инструментальная головка представляет собой зажимную головку, содержащую один или более зажимных роликов, расположенных для взаимодействия и прокатки по выступу края изгибаемого металлического листа (например, по периметру конструкции автомобильной двери на линии по производству автомобильных дверей). В случае данного конкретного применения с зажимной головкой связаны один или более датчиков силы, которые детектируют усилие на зажимные ролики во время выполнения операции зажима.
Как указано выше, данное изобретение в любом случае предназначено для общего применения, при этом оно также может предназначаться для использования в случае инструментальной головки, которую оператор приводит в действие вручную, например, в случае управляемой вручную головки для электрической точечной сварки.
Не зависимо от типа используемой инструментальной головки и конфигурации устройства существует проблема сбора данных, поступающих от датчиков, связанных с инструментальной головкой, с помощью средств, которые должны быть простыми, насколько это возможно, и ограниченными в размерах.
Было предложено связать содержащуюся в роботе инструментальную головку с блоком беспроводный передачи, выполненным с возможностью управления и контроля операции инструментальной головки в беспроводном режиме (см., например, патентные документы DE 20 2011 000 315 U1 и US 2006-0122730 А1). Однако известные устройства не решают еще одну проблему, которая связана с необходимостью обеспечить высокую рабочую автономность устройства, а также с одновременной необходимостью избежать использования кабелей электропитания, которые, прежде всего, в случае инструментальной головки, содержащейся в роботе, приводят к конструктивным усложнениям и делают трудоемкими операции замены инструментальной головки.
Вместо этого необходимо сократить или совсем устранить электропроводку, соединяющую инструментальную головку с роботом. Фактически, электропроводка подвергается значительному износу вследствие повторяющихся циклов деформации, которым они подвергаются в течение срока службы робота, и, поэтому, она должна периодически заменяться, что приводит к уменьшению производительности вследствие продолжительных остановок, необходимых для операций замены.
Для оптимального выполнения всех вышеупомянутых требований и решения вышеупомянутых проблем задача данного изобретения заключается в создании устройства упомянутого в начале данного описания типа, которая отличается тем, что она дополнительно содержит:
- модуль управления, установленный на упомянутой инструментальной головке и содержащий:
- блок сбора данных, соединенный с упомянутым, по меньшей мере, одним датчиком и выполненный с возможностью сбора данных, поступающих от упомянутого, по меньшей мере, одного датчика,
- блок беспроводный передачи, соединенный с упомянутым блоком сбора данных для приема упомянутых собранных данных и выполненный с возможностью передачи упомянутых собранных данных в беспроводном режиме в приемный блок, удаленный от инструментальной головки, и
- устройство для аккумулирования электроэнергии для питания упомянутого блока сбора данных, упомянутого блока беспроводный передачи и упомянутого, по меньшей мере, одного датчика,
причем упомянутое устройство дополнительно содержит беспроводное средство для зарядки упомянутого устройства для аккумулирования электроэнергии, например, индуктивное зарядное средство, содержащее первое зарядное средство, содержащееся в упомянутой инструментальной головке и соединенное с упомянутым устройством аккумулирования электроэнергии, и второе зарядное средство, которое выполнено с возможностью связи с рабочим постом, которое удалено от инструментальной головки и взаимодействует в беспроводном режиме с упомянутым первым зарядным средством, соединенным с упомянутым устройством для аккумулирования электроэнергии.
Благодаря вышеупомянутым признакам устройство согласно изобретению обеспечивает на инструментальной головке блок сбора данных и модуль передачи данных очень малых размеров, которые выполнены с возможностью обработки большого количества данных и, несмотря на это, с возможностью работы по существу непрерывно в течение длительных периодов времени.
Устройство согласно изобретению решает в корне проблему износа электропроводки, которая в известных решениях необходима для электропитания датчиков инструментальной головки. Согласно изобретению установленный на инструментальной головке модуль управления также содержит устройство для аккумулирования электроэнергии, которое обеспечивает автономное электропитание всех устройств инструментальной головки.
Устранение электропроводки, таким образом, обеспечивает возможность радикального сокращения потребности в остановках для удобства технического обслуживания, что дает последующее увеличение производительности.
Во многих применениях устранение электропроводки также обеспечивает создание инструментальной головки в виде блока, который является полностью автономным по отношению к содержащей его конструкции (например, роботу), вследствие чего открывается возможность быстрой замены инструментальной головки, например, когда необходимо изменить тип машинной операции.
В то же время устройство согласно изобретению в любом случае может обеспечить возможность легкой и быстрой беспроводной зарядки устройства аккумулирования энергии. По этой причине устройство согласно изобретению представляет собой существенное улучшение и существенно отличается по сравнению с известными устройствами, в которых беспроводная передача используется только для обмена сигналами между датчиками инструментальной головки и стационарным блоком управления.
Количество расположенных в инструментальной головке датчиков может быть любым, при этом они могут быть любого рода (аналоговыми или цифровыми). В частности, устройство согласно изобретению выполнено с возможностью обеспечения одновременного питания и контроля множества датчиков, предназначенных для детектирования множества различных рабочих параметров инструментальной головки.
В предпочтительном варианте осуществления изобретения предусмотрен электронный блок обработки, предназначенный для обработки данных, поступающих от вышеупомянутого беспроводного приемного блока и от вышеупомянутого блока управления. Однако, при практической реализации могут быть связаны или интегрированы друг с другом два или более из вышеупомянутых трех блоков (блок управления, стационарный беспроводный приемный блок и блок обработки).
В случае использования с роботом вышеупомянутый блок управления инструментальной головкой представляет собой блок управления роботом. Однако блок управления может в целом представлять собой любой блок управления, связанный с рабочим постом, на котором оперирует инструментальная головка.
Следует отметить, что в случае упомянутого выше предпочтительного варианта осуществления изобретения второе зарядное средство и/или приемный блок могут быть стационарными. Также можно предусмотреть второе стационарное зарядное средство, связанное с и/или интегрированное в стационарный беспроводный приемный блок.
Как вариант, рабочий пост со вторым зарядным средством и/или приемным блоком может быть расположен в роботе на части робота на цепочке элементов, которая соединяет основание робота с запястьем робота таким образом, что сам робот может перемещать инструментальную головку в окрестность части робота, на которой расположено второе зарядное средство и/или приемный блок.
Другие признаки и преимущества данного изобретения будут ясны из последующего описания со ссылками на прилагаемые чертежи, которые приведены исключительно в качестве примера, который не ограничивает объем правовой охраны. На чертежах:
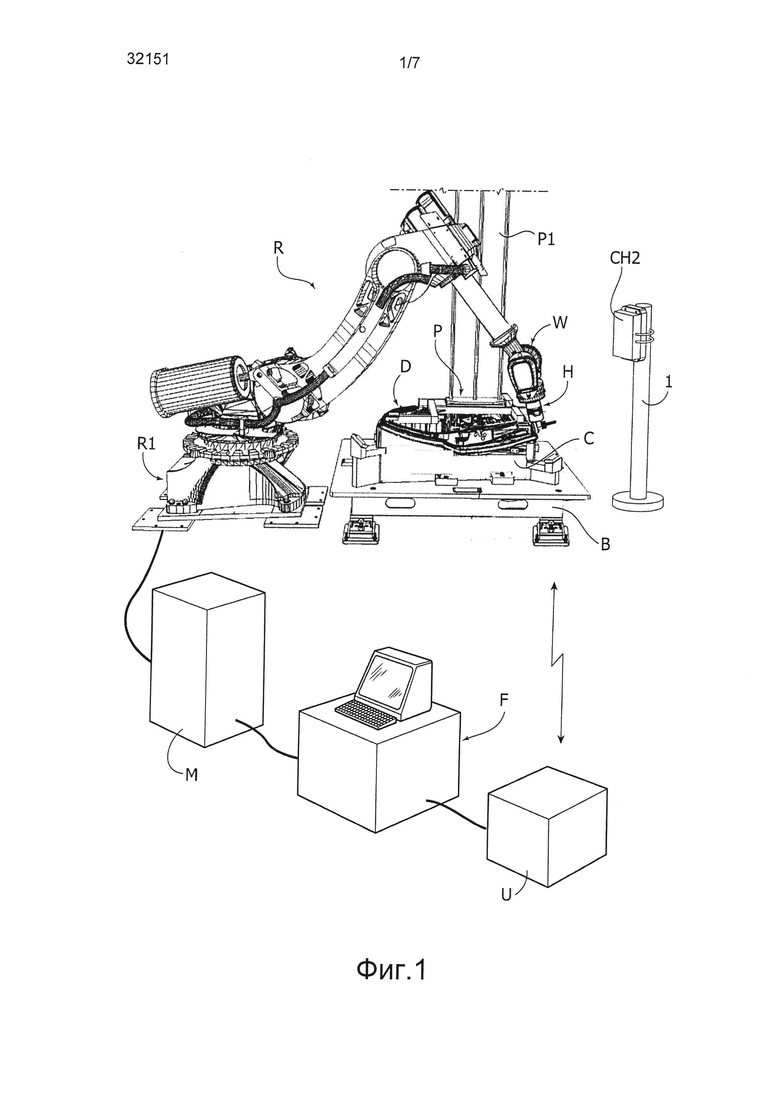
на фиг. 1 показан вид в перспективе роботизированного поста, расположенного на линии по производству автомобильных дверей для выполнения операции зажима двух панелей из листового металла, которые образуют конструкцию двери, по периметру двери;
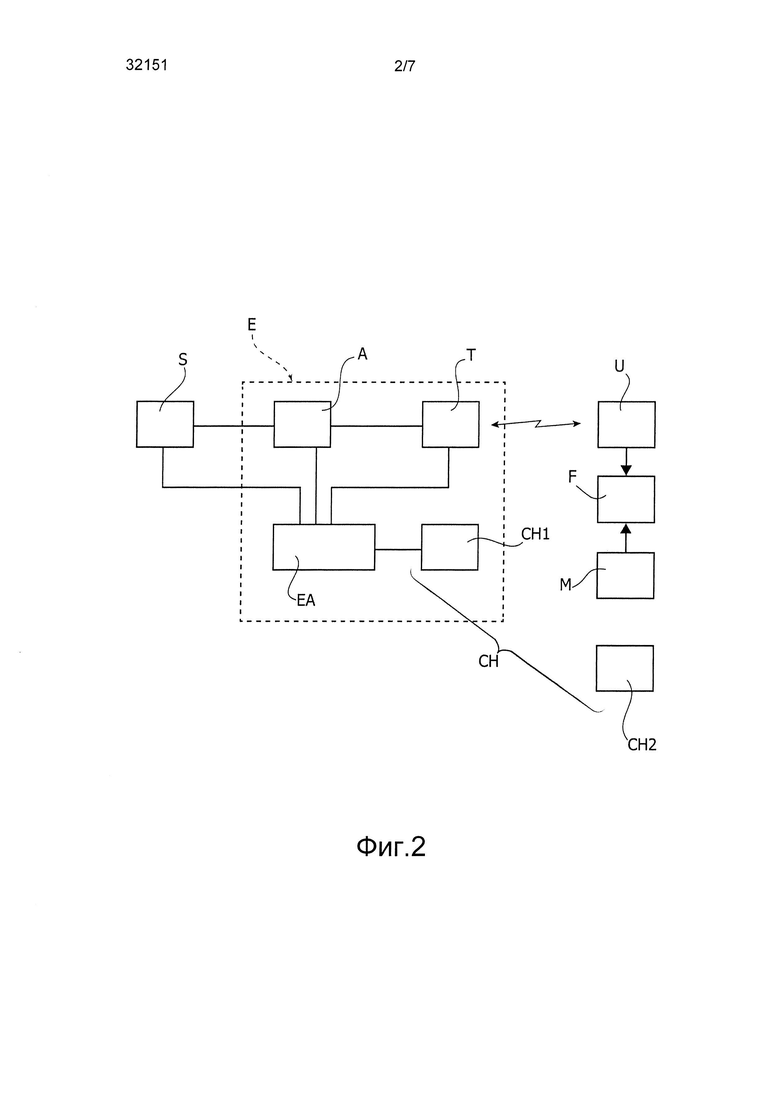
на фиг. 2 показана блок-схема устройства согласно изобретению, на котором пост зажима, изображенный на фиг. 1, является примером применения;
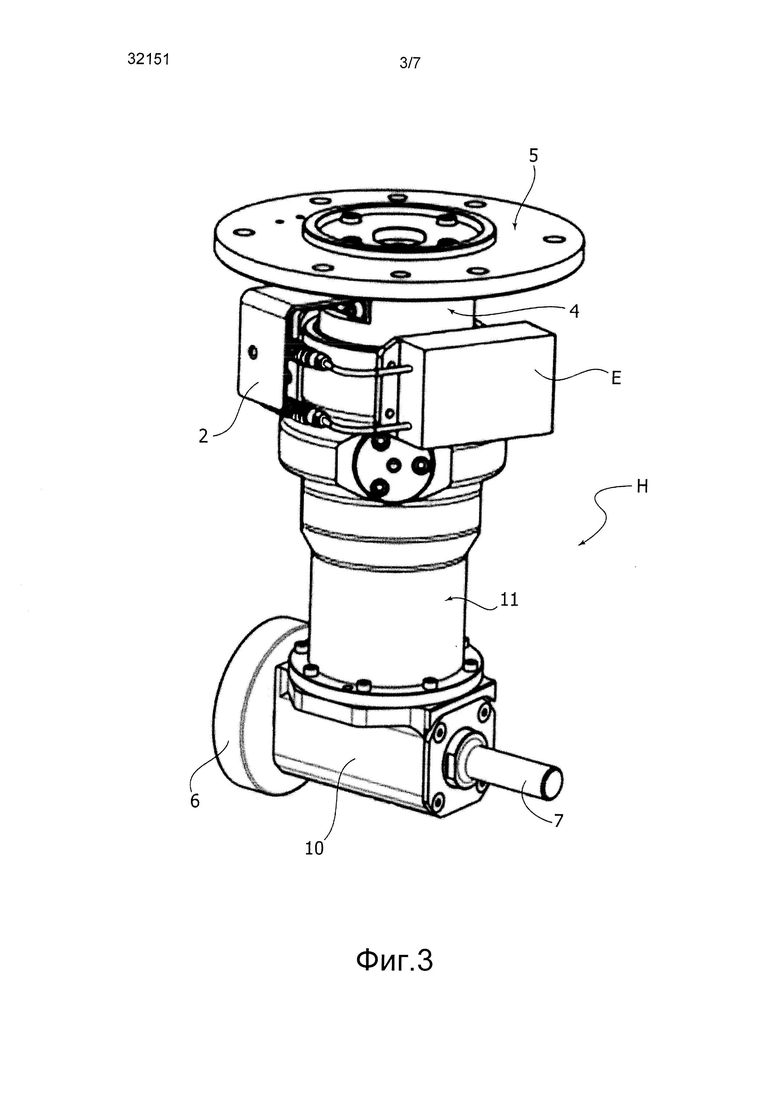
на фиг. 3 показан вид в перспективе инструментальной головки, содержащейся в роботе, который изображен на фиг. 1;
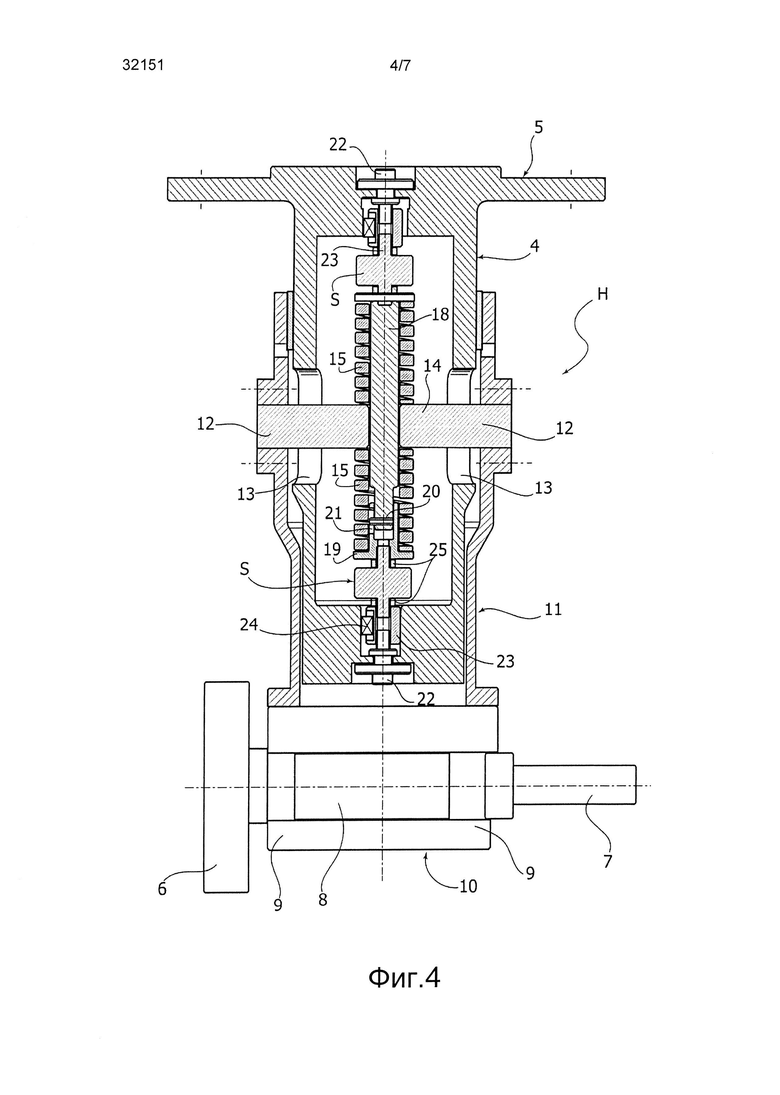
на фиг. 4 показан вид в разрезе инструментальной головки, которая изображена на фиг. 3;
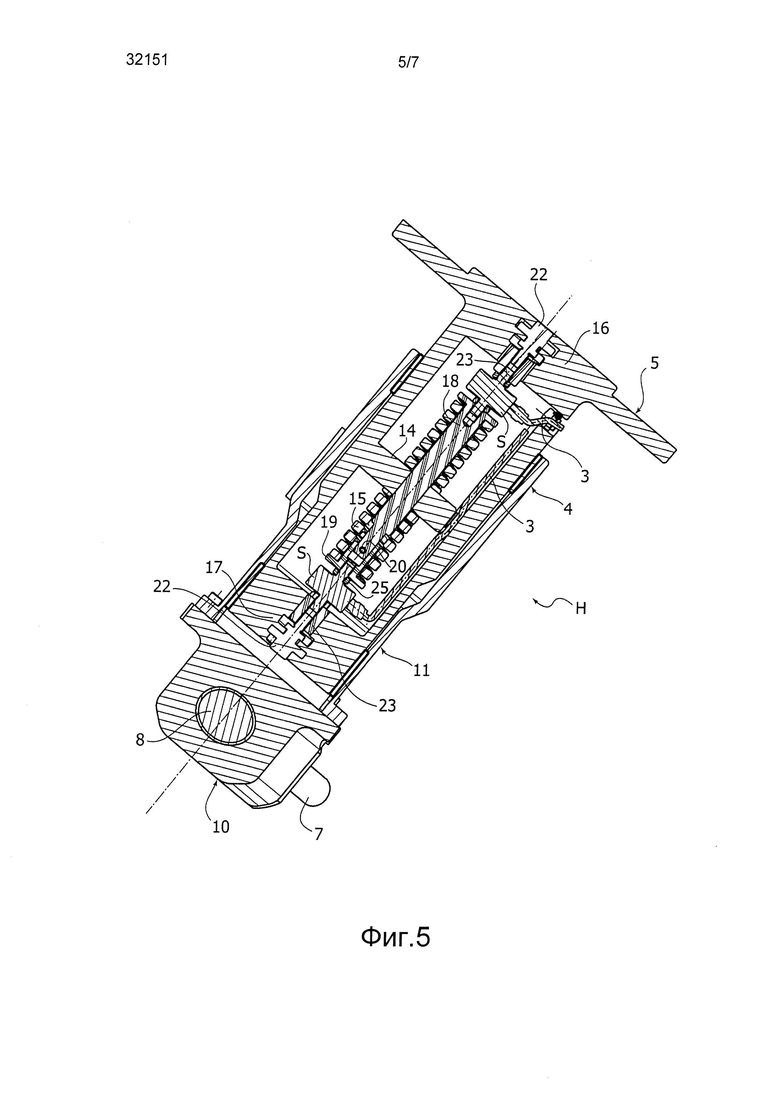
на фиг. 5 показан вид в разрезе в плоскости, перпендикулярной плоскости на фиг. 4;
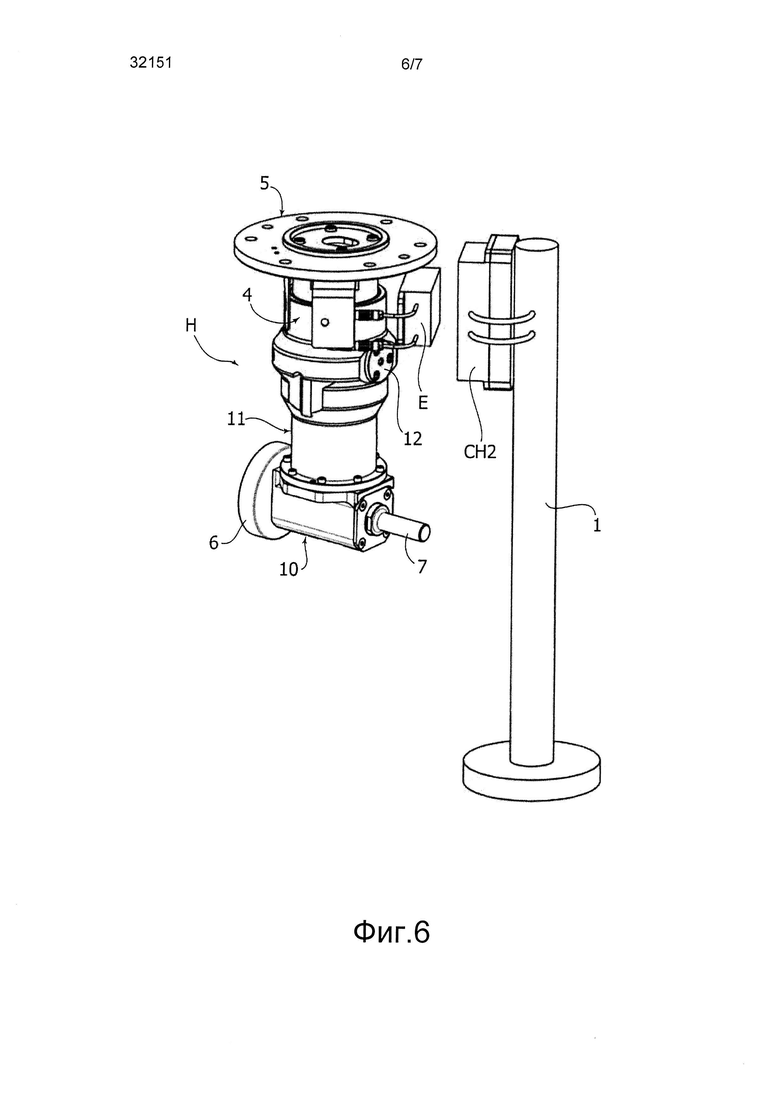
на фиг. 6 показан вид в перспективе, на котором изображена инструментальная головка, содержащаяся в роботе на фиг. 1 (робот не показан на фиг. 6) в положении готовности смежно с рабочим постом для зарядки устройства аккумулирования энергии, которое расположено на инструментальной головке; и
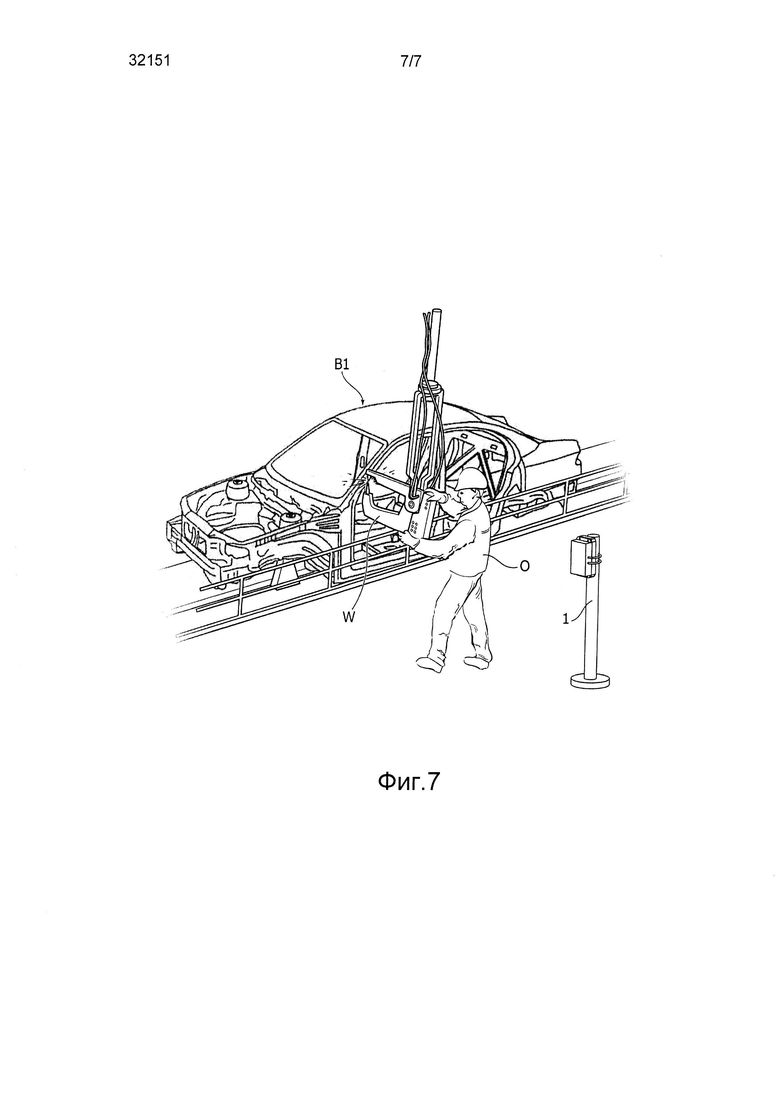
на фиг. 7 показан вид в перспективе, на котором показан пост ручной сварки на линии по производству автомобильных корпусов, с которой также может использоваться устройство согласно изобретению.
Как упоминалось выше, данное изобретение предназначено для общего применения. На фиг. 1 прилагаемых чертежей исключительно в качестве примера показано применение изобретения к зажимному посту, расположенному на линии по производству автомобильных дверей для выполнения операции зажима двух панелей из листового металла, образующих конструкцию двери, по периметру двери.
В соответствии с известным способом конструкция D двери укладывается в горизонтальном положении над опорой С, расположенной на основании В. Конструкция D двери прижимается к опоре С прижимной частью Р, расположенной на нижнем конце вертикальной мобильной стойки Р1. Операция зажима выполняется посредством зажимной головки Н, которая установлена съемным образом на запястье W многоосного шарнирного робота R любого известного типа, содержащего опорную конструкцию R1 и множество шарнирно соединенных друг с другом элементов робота, которые соединяют опорную конструкцию R1 с запястьем W робота. Работа робота управляются известным образом посредством стационарного блока М управления любого известного типа. Таким образом, в данном конкретном применении блок М управления инструментальной головки представляет собой блок управления роботом. Однако, как указано выше, блок управления инструментальной головкой может представлять собой любой блок управления, связанный с рабочим постом, на котором используется инструментальная головка.
Со ссылкой на фиг. 2, которая относится в целом к конструкции устройства согласно изобретению, а также независимо от конкретного применения, показанного на фиг. 1, устройство содержит, по меньшей мере, один датчик S, который связан с инструментальной головкой Н и выполнен с возможностью детектирования рабочего параметра инструментальной головки. Датчик S соединен с модулем Е управления, установленным на инструментальной головке и содержащим блок А сбора данных, который соединен с датчиком S и выполнен с возможностью сбора данных, поступающих от датчика S. Кроме того, модуль Е управления содержит блок Т беспроводный передачи, который соединен с блоком А сбора данных для приема данных, собранных датчиком, и который выполнен с возможностью передачи в беспроводном режиме вышеупомянутых собранных данных в беспроводный приемный блок U.
Блок А сбора данных может быть предназначен не только для выполнения сбора данных, но также для начальный обработки или преобразования данных до их передачи (например, для аналого-цифрового преобразования сигнала).
В предпочтительном варианте осуществления изобретения, показанном здесь схематически, беспроводный приемный блок U и блок М управления роботом соединены с электронным блоком F обработки, который соответственно выполнен с возможностью приема в течение рабочего цикла робота данных из блока U, поступающих от датчиков S, и данных из блока М, относящихся к рабочим параметрам робота (см. также фиг. 1).
Как упомянуто выше, в практической реализации два или более из вышеупомянутых трех блоков (блок М управления, стационарный беспроводный приемный блок U и блок F обработки) могут быть связаны или интегрированы друг с другом.
Модуль Е управления, установленный на инструментальной головке, дополнительно содержит устройство ЕА для аккумулирования электроэнергии для электропитания датчика S, блока А сбора данных и блока Т беспроводный передачи. На фиг. 2 схематически показано прямое соединение между устройством ЕА и датчиком S. Однако в конкретной реализации устройство ЕА может быть предназначено для питания датчика S как через прямое соединение, так и через блок А сбора данных, а также через включение устройства - стабилизатора питания любого известного типа. То же самое относится, конечно, к электропитанию всех других устройств, содержащихся в модуле Е управления.
В устройстве согласно изобретению может использоваться любой протокол беспроводный передачи, обеспечивающий гарантированную передачу в индустриальных условиях, например, протокол Bluetooth, или протокол Zig-Bee, или протокол Wi-Fi, или любой из производных протоколов.
Наконец, устройство содержит беспроводное зарядное средство СН для зарядки устройства ЕА для аккумулирования электроэнергии, которое содержит первое зарядное средство СН1, содержащееся в инструментальной головке и соединенное с устройством ЕА аккумулирования электроэнергии, и второе зарядное средство СН2, расположенное в положении, удаленном от инструментальной головки, например, в стационарном положении над стойкой 1 (как в примере, показанном на фиг. 1). Беспроводные зарядные средства СН1, СН2 предназначены для работы, когда они находятся в положении, в котором они сближены любым известным способом, например с помощью системы индуктивной зарядки, т.е. путем обеспечения в зарядном средстве СН1 витка, через который проходит магнитный поток, создаваемый другим витком, содержащимся в зарядном средстве СН2.
Второе зарядное средство СН2 может быть связано с, например, беспроводным приемным блоком U и/или может быть интегрировано в нем.
Как вариант, рабочая станция со вторым зарядным средством СН2 может быть расположена в роботе, а именно на части робота на цепочке элементов, которая соединяет основание робота с запястьем робота, так что робот может сам переместить инструментальную головку в окрестность части робота, на которой расположено второе зарядное средство.
Как можно видеть, в устройстве согласно изобретению предусмотрена не только беспроводная передача данных, поступающих от датчиков, связанных с инструментальной головкой, но также беспроводное зарядное средство, обеспечивающее возможность зарядки устройства ЕА аккумулирования энергии, которое предназначено для питания как блока модуля Е управления, расположенного на инструментальной головке, так и датчиков S, связанных с инструментальной головкой.
Блок F обработки может использовать и обрабатывать данные, полученные от блока U, регистрируя параметры, детектируемые датчиками S, связывая их с информацией, полученной от блока М управления роботом, в отношении рабочего цикла робота так, чтобы получать точную и оперативную информацию о функциональных параметрах устройства при выполнении индустриальной операции в условиях, связанных с положением робота. В случае, например, зажимного поста, показанного на фиг. 1, блок F обработки может таким образом оценивать и соотносить соответствующие рабочие параметры к каждой рабочей позиции робота.
Согласно примеру, изображенному на фиг. 3, зажимная головка Н имеет модуль Е управления, который схематически показан на фиг. 2. Модуль Е соединен с коробкой 2, содержащей электрические соединители для соединения кабелей 3 (см. фиг. 5), которые подходят к двум датчикам, которые в случае рассматриваемого примера связаны с зажимной головкой.
В случае примера использования данного изобретения с зажимной головкой упомянутая инструментальная головка в целом может быть любого известного типа. Например, зажимная головка, которая может использоваться, является зажимной головкой, представляющей предмет международной патентной публикации №WO 2012/160512, поданной от имени данного заявителя. Однако в предпочтительном варианте осуществления изобретения зажимная головка имеет дополнительные инновационные признаки, которые описаны ниже.
Как показано на фиг. 3-6, в изображенном примере зажимная головка Н содержит внутренний цилиндрический корпус 4, имеющий в верхней части дискообразный фланец 5, который может быть привинчен к запястью робота R. На своем нижнем конце зажимная головка Н содержит два зажимных ролика 6, 7 разного диаметра, которые при необходимости могут избирательно использоваться при операциях зажима. Как можно видеть на фиг. 4, два ролика 6, 7 расположены на одном и том же вале 8, установленном с возможностью вращения посредством подшипников 9 внутри содержащего ролики узла 10. К нижней части цилиндрического корпуса 11, установленного с возможностью скольжения на корпусе 4 зажимной головки Н, привинчен содержащий ролики узел 10. На стенку цилиндрического корпуса 11 опираются два штифта 12, которые диаметрально противоположны друг другу, проходят через продольные пазы 13 и опираются на противоположные стороны опорного элемента 14, который таким образом жестко соединен с внешним цилиндрическим корпусом 11 зажимной головки Н. Две противоположные поверхности опорного элемента 14 служат в качестве опоры для двух соответствующих винтовых пружин 15, противоположные концы которых соответственно опираются на противоположные концевые стенки внутреннего цилиндрического корпуса 4 инструментальной головки Н. Таким образом, как можно видеть, противоположные концы двух пружин 15 опираются на внутренний цилиндрический корпус 4, при этом взаимно смежные концы пружин 15 опираются на общий опорный элемент 14, жестко соединенный с внешним цилиндрическим корпусом 11.
Во время работы робот помещает зажимную головку Н на деталь так, что один из двух роликов 6, 7 прокатывается по краю сгибаемого металлического листа. Эта операция может быть выполнена путем прижатия ролика 6 или 7 в направлении сверху вниз (относительно фиг. 4) к сгибаемому металлическому листу или путем прижатия в направлении снизу вверх ролика 6 или 7 к сгибаемому металлическому листу. В первом случае внутренний цилиндрический корпус 4 опускается относительно внешнего цилиндрического корпуса 11 (относительно фиг. 4), так что верхняя пружина 15 сжимается, а во втором случае внутренний цилиндрический корпус 4 поднимается относительно внешнего цилиндрического корпуса 11, так что нижняя пружина 15 сжимается. Усилие, приложенное к зажимной головке, регулируется в упомянутых двух случаях посредством соответствующих двух датчиков S силы (датчиков усилия), которые установлены между наиболее удаленными концами пружин 15 и соответствующими опорными элементами 16, 17.
В соответствии с дополнительной важной особенностью две пружины 15 направляются посредством направляющего пружину стержня 18, проходящего в осевом направлении через две пружины и через опорный элемент 14. Нижний конец направляющего пружину стержня 18 соединен с диском 19, на который опирается нижний конец нижней пружины 15 посредством штыревого зажима, содержащего поперечный штифт 20, расположенный на стержне 18, и фигурный паз 21, выполненный в цилиндрической юбке, проходящей из диска 19.
Форма паза такова, что узел образуется в соответствии с обычным способом использования штыревых зажимов, то есть сначала выполняется осевое перемещение диска 19, которое приводит к сжатию нижней пружины 15, затем поворот диска 19, за которым следует разжимание в осевом направлении под воздействием нижней пружины 15 с достижением окончательно заблокированного положения. Таким образом, блокирование соединения обеспечивается нижней пружиной 15.
Благодаря данной конструкции монтаж узла может быть осуществлен простым и быстрым способом.
Нагрузка от двух пружин 15 может регулироваться путем воздействия на винт 22 на каждом из двух наиболее удаленных концов пружин, причем данный винт взаимодействует с вкладышем 23 с внутренней резьбой, который выполнен с возможностью предотвращения поворота относительно корпуса 11 посредством клина 24 и который, кроме того, взаимодействует со стержнем 25 с резьбой, проходящим от корпуса соответствующего датчика S. Вращение винта 22 обеспечивает возможность изменения осевого положения вкладыша 23 с резьбой относительно опорного элемента 16 или 17.
Во время операции регулирования усилия пружин 15 относительное осевое положение внешнего цилиндрического корпуса 11 и внутреннего цилиндрического корпуса 4 блокируется путем вставки блокирующего штифта через расположенные на одной прямой отверстия (не показаны на чертежах) в вышеупомянутых цилиндрических корпусах.
Описанное выше устройство для регулировки усилия пружин 15 представляет собой существенное усовершенствование по сравнению с тем, что было предложено в устройствах, описанных в документе №WO 2012/160512. В упомянутых выше известных устройствах для регулировки усилия пружины необходимо измерить свободную длину пружины, затем измерить эффективную длину отделения, в которой она установлена, и вставить серию прокладок или шайб, обеспечивающих необходимое сжатие.
Кроме того в данных известных устройствах, если пружина ломается до ее замены, то необходимо выполнить измерение новой пружины, пересмотреть размер монтажной части и обеспечить прокладки, необходимые для воссоздания той же величины усилия.
При помощи описанного выше нового устройства регулировки можно обеспечить тонкую регулировку величины усилия, воспроизводя при этом одно и то же усилие, несмотря на замену пружины (при этом допуск на длину пружины широк), причем с помощью винта 22 можно восстановить в достаточной степени любой люфт и воссоздать необходимое усилие. Таким образом, можно точно воспроизвести одинаковые калибровки между различными зажимными головками независимо от конструктивных допусков устройств. Кроме того, с помощью датчика S можно оценить целостность пружины во время использования инструментальной головки.
Как упоминалось выше, на фиг. 6 показана зажимная головка Н в положении готовности, в котором модуль Е управления и, в частности, зарядное средство СН1 расположены вблизи зарядного средства СН2 для обеспечения возможности индуктивной зарядки устройства ЕА аккумулирования энергии.
Как уже упоминалось выше, приемный блок U, как и второе зарядное средство СН2, может быть расположен в роботе, а именно на части робота на цепочке элементов, которая соединяет основание робота с запястьем робота, таким образом, что робот может сам поместить инструментальную головку в окрестность части робота, на которой расположен зарядный блок.
На фиг. 7 показано другое применение устройства согласно изобретению, в котором инструментальная головка представляет собой вилку W электрической точечной сварки, которая управляется вручную оператором О для выполнения электрической точечной сварки на корпусе В1 на линии сборки автомобильных корпусов. Со сварочной головкой W известным способом могут быть связаны датчики для детектирования усилия, прикладываемого к сварочным электродам. Также и в данном случае на инструментальной головки W расположен модуль Е управления показанного на фиг. 2 типа, который обеспечивает возможность передачи измеренных данных в блок U, что делает возможным обработку этих данных блоком F обработки и соотнесение их с выполняемым рабочим циклом. Кроме того, в данном случае для зарядки устройства ЕА аккумулирования энергии, встроенного в сварочную головку W, предусмотрен стационарный рабочий пост 1. В данном применении блок М управления инструментальной головкой (не показан на фиг. 7) представляет собой блок управления рабочего поста или линии, на которой используется сварочная головка W.
Подразумевается, что без ущерба для идеи данного изобретения элементы конструкции и варианты осуществления изобретения могут значительно отличаться от элементов и вариантов, описанных и показанных в данном документе исключительно в качестве примера, без отступления тем самым от объема правовой охраны данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЖИМНОЙ ПАТРОН | 2018 |
|
RU2739095C2 |
| Интервенционная автоматизированная операционная система | 2022 |
|
RU2801157C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СВАРОЧНАЯ ГОЛОВКА ДЛЯ ЭЛЕКТРИЧЕСКОЙ СВАРКИ СОПРОТИВЛЕНИЕМ С ЭЛЕКТРОДАМИ, РАСПОЛОЖЕННЫМИ С ОДНОЙ СТОРОНЫ | 2018 |
|
RU2741430C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| АППАРАТ ДЛЯ НАНЕСЕНИЯ ЗАКЛЕПОК НА ЗАГОТОВКУ, СОДЕРЖАЩИЙ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И КОРРЕКТИРОВАНИЯ ПОЛОЖЕНИЯ КЛЕПАЛЬНОГО РАБОЧЕГО УСТРОЙСТВА ОТНОСИТЕЛЬНО УПОМЯНУТОЙ ЗАГОТОВКИ | 2016 |
|
RU2698238C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| Гибкая производственная система | 1988 |
|
SU1743802A1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПРОМЫШЛЕННЫХ ПРОЦЕССОВ | 2005 |
|
RU2367549C2 |
Изобретение относится к устройствам для выполнения производственных операций с зажимом обрабатываемых деталей. Устройство содержит по меньшей мере одну зажимную головку (Н) с зажимным инструментом (6, 7), по меньшей мере один датчик (S) силы для определения усилия, приложенного к зажимному инструменту (6, 7) в процессе операции зажима. Кроме того, устройство содержит модуль (Е) управления, установленный на зажимной головке (Н), блок (А) сбора данных которого соединен с датчиком (S) силы, блок (Т) беспроводной передачи, выполненный с возможностью передачи собранных данных в беспроводном режиме в приемный блок (U). Модуль (Е) содержит устройство (ЕА) для аккумулирования электроэнергии для электропитания блоков устройства. Устройство также содержит беспроводное средство (СН) для зарядки устройства (ЕА) для аккумулирования электроэнергии. Использование изобретения позволяет увеличить надежность и производительность устройства. 10 з.п. ф-лы, 7 ил.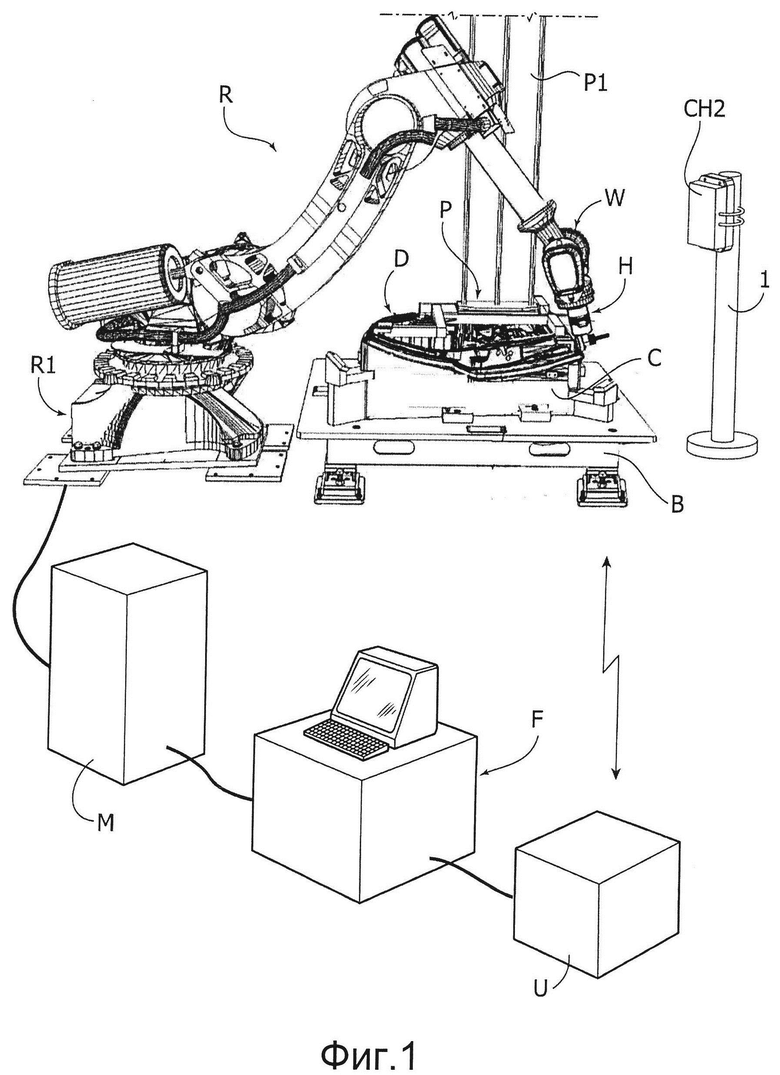
1. Устройство для зажима обрабатываемых деталей, содержащее:
- многоосный промышленный робот (R) с опорной конструкцией (R1) и запястьем (W), которое шарнирно закреплено на конечном элементе шарнирно соединенных друг с другом по цепочке элементов робота, соединяющих запястье (W) робота с упомянутой опорной конструкцией (R1),
- по меньшей мере одну зажимную головку (Н) с зажимным инструментом (6, 7), которая съемным образом соединена с упомянутым запястьем (W) робота и включает в себя:
- по меньшей мере один датчик (S) силы, выполненный с возможностью определения усилия, приложенного к зажимному инструменту (6, 7) в процессе операции зажима,
- блок (М) управления работой зажимной головки (Н),
- модуль (Е) управления, состоящий из
- блока (А) сбора данных, соединенного с упомянутым по меньшей мере одним датчиком (S) и выполненного с возможностью сбора данных, поступающих от него, и
- блока (Т) беспроводной передачи, соединенного с упомянутым блоком (А) и выполненного с возможностью приема упомянутых собранных данных и передачи их в беспроводном режиме в приемный блок (U), удаленный от зажимной головки (Н),
- устройства (ЕА) для аккумулирования электроэнергии для электропитания упомянутых блока (А), блока (Т) и по меньшей мере одного датчика (S) силы, и
- первого зарядного средства (СН1), соединенного с упомянутым устройством (ЕА) для аккумулирования электроэнергии и выполненного с возможностью взаимодействия в беспроводном режиме со вторым зарядным средством (СН2), расположенным на рабочем посту (1), удаленном от зажимной головки (Н),
причем упомянутые первое (СН1) и второе (СН2) зарядные средства образуют беспроводное средство (СН) для зарядки упомянутого устройства (ЕА),
отличающееся тем, что упомянутая зажимная головка (Н) выполнена в виде
внешнего цилиндрического корпуса (11), установленного с возможностью скольжения на внутреннем цилиндрическом корпусе (4), на верхнем конце которого расположен фланец (5) для соединения с запястьем (W) робота, и
установленного на нижнем конце внешнего цилиндрического корпуса (11) узла (10), в котором размещен упомянутый зажимной инструмент, выполненный в виде по меньшей мере одного зажимного ролика (6, 7), при этом
внутри упомянутого внутреннего цилиндрического корпуса (4) соосно и на одной линии расположены верхняя и нижняя спиральные пружины (15), смежные концы которых расположены с упором на противоположные поверхности промежуточного опорного элемента (14), жестко соединенного с упомянутым внешним цилиндрическим корпусом (11) с помощью несущих штифтов (12), которые расположены диаметрально противоположно друг другу в продольных пазах (13) упомянутого внутреннего цилиндрического корпуса (4), причем
в упомянутых верхней и нижней пружинах (15) установлен направляющий стержень (18), проходящий в осевом направлении через упомянутые пружины и через упомянутый промежуточный опорный элемент (14), а
два датчика (S) силы размещены между противоположными концами упомянутых верхней и нижней пружин (15) и соответствующими торцевыми частями внутреннего цилиндрического корпуса (4).
2. Устройство по п. 1, отличающееся тем, что упомянутые датчики (S) силы соединены посредством соответствующих кабелей (3) с упомянутым блоком (А) сбора данных, при этом упомянутый модуль (Е) управления установлен на упомянутом внутреннем цилиндрическом корпусе (4).
3. Устройство по п. 1, отличающееся тем, что оно снабжено первым винтовым средством (22) для регулировки усилия упомянутой нижней пружины (15) и вторым винтовым средством (22) для регулировки усилия упомянутой верхней пружины (15).
4. Устройство по п. 1 или 2, отличающееся тем, что оно снабжено установленным на нижнем конце упомянутого направляющего стержня (18) опорным диском (19) с цилиндрической юбкой, имеющей фигурный паз (21) для взаимодействия с поперечным штифтом (20), расположенным в упомянутом направляющем стержне (18) с возможностью обеспечения монтажа упомянутого опорного диска (19) с помощью штыревого зажима, при этом опорный диск (19) расположен с упором в него нижнего конца нижней пружины (15).
5. Устройство по п. 3, отличающееся тем, что каждое из упомянутых первого и второго винтовых средств для регулировки содержит винт (22), установленный с возможностью поворота в осевом фиксированном положении на каждой из упомянутых торцевых частей внутреннего цилиндрического корпуса (4), и вкладыш (23) с внутренней резьбой, выполненный с возможностью предотвращения поворота относительно торцевой части и установленный с возможностью взаимодействия с упомянутым винтом (22) и с резьбовым стержнем (25) соответствующего датчика (S) силы, связанного с соответствующей пружиной (15).
6. Устройство по п. 1, отличающееся тем, что оно снабжено расположенными на зажимной головке дополнительными датчиками (S) для определения различных рабочих параметров зажимной головки.
7. Устройство по п. 1, отличающееся тем, что оно снабжено электронным блоком (F) для обработки данных, поступающих от упомянутого беспроводного приемного блока (U) и от упомянутого блока (М) управления зажимной головкой.
8. Устройство по п. 1, отличающееся тем, что два или более блоков из числа упомянутого блока (М) управления, упомянутого приемного блока (U) и упомянутого блока (F) обработки связаны или интегрированы друг с другом.
9. Устройство по п. 1, отличающееся тем, что упомянутый рабочий пост (1) выполнен стационарным.
10. Устройство по п. 1, отличающееся тем, что упомянутое второе зарядное средство связано и/или интегрировано с упомянутым приемным блоком (U).
11. Устройство по п. 1, отличающееся тем, что упомянутый рабочий пост (1), содержащий второе зарядное средство (СН2), и/или упомянутый приемный блок (U) расположены в упомянутой цепочке шарнирно соединенных друг с другом элементов робота, который выполнен с возможностью перемещения зажимной головки (Н) для ее взаимодействия со вторым зарядным средством (СН2) и/или приемным блоком (U).
| DE 202011000315 U1, 21.05.2012 | |||
| СИСТЕМА С ПОДВИЖНЫМ РОБОТОМ И СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2006 |
|
RU2320020C1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ | 2001 |
|
RU2215626C2 |
| US 2012247208 A1, 04.10.2012 | |||
| WO 2012160512 A1, 29.11.2012. | |||

