Область техники
Данное изобретение относится к автомобильной сфере, а именно к автомобильной вспомогательной системе и способу управления.
Предыдущий уровень техники
Система электронного контроля устойчивости ESP (Electrical Stable Program) позволяет в критический момент, когда возникает риск потери управления автомобилем, посредством быстрого вмешательства в работу системы управления двигателем и тормозной системы обеспечить устойчивость движения и гарантировать безопасность водителя и автомобиля.
Система ESP главным образом включает в себя 3 основных блока управления: антиблокировочную тормозную систему ABS (Anti-lock Break System), систему контроля тяги TCS (Traction Control system) и систему динамической стабилизации VDC (Vehcile Dynamic Control).
Тем не менее, из числа взаимодействующих систем электронного блока управления ECU (Electronic Control Unit) автомобиля система ESP очень мало взаимодействует с другими системами, при этом выполняет роль подсистемы. Например, при взаимодействии с системой адаптивного круиз-контроля ACC (Adaptive Cruise Control system) система ESP выполняет функцию экстренного торможения, а при взаимодействии с системой автоматической парковки APA (Auto Parking Assistance System) система ESP выполняет функцию распознавания направления скорости вращения колеса и скорости вращения колес.
Сущность изобретения
Целью примеров реализации данного изобретения является представить используемые для автомобиля вспомогательную систему управления и способ управления, предназначенные для того, чтобы, по меньшей мере, улучшить сферу стратегии управления системы ESP.
Для достижения вышеупомянутой цели пример реализации данного изобретения представляет автомобильную вспомогательную систему управления, которая включает в себя следующее: вспомогательный блок динамической курсовой стабилизации DSA и блок электроусилителя руля EPS. Упомянутый блок DSA используется для выполнения нескольких нижеперечисленных последовательных операций: обнаружение особых рабочих условий автомобиля; при обнаружении особых рабочих условий автомобиля - расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS; использование упомянутого блока EPS для того, чтобы в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректировать крутящий момент рулевого колеса автомобиля.
Опционально, упомянутый блок DSA может использоваться для циклического выполнения нижеперечисленных последовательных операций; и/или упомянутые особые рабочие условия автомобиля могут подразумевать одно или несколько из нижеперечисленных состояний: избыточная поворачиваемость, недостаточная поворачиваемость, торможение на дороге с разным левым/правым коэффициентом сцепления, ускорение на дороге с разным левым/правым коэффициентом сцепления; условия поворота, когда боковое ускорение превышает предустановленное ускорение.
Опционально, упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления и угловым коэффициентом упомянутого вспомогательного крутящего момента рулевого управления корректирует упомянутый крутящий момент рулевого колеса.
Опционально, упомянутый блок EPS может использоваться для того, чтобы: в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, выполнять следующую последовательность: если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент имеют нормальное значение, выполнять наложение упомянутого крутящего момента рулевого колеса и упомянутого вспомогательного крутящего момента рулевого управления; если упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение, а упомянутый угловой коэффициент имеет отклонение от нормы, то в соответствии с предварительно заданным значением углового коэффициента и значением крутящего момента последнего наложения рассчитывать текущий необходимый для наложения крутящий момент; если упомянутый вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, а упомянутый угловой коэффициент имеет нормальное значение или отклонение от нормы, то выполнять наложение упомянутого крутящего момента рулевого колеса с предварительно заданным крутящим моментом, при этом направление наложения упомянутого предварительно заданного крутящего момента будет совпадать с направлением наложения упомянутого вспомогательного крутящего момента рулевого управления; в том числе, когда вспомогательный крутящий момент рулевого управления находится в диапазоне предварительно заданного крутящего момента, определять, что упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение; когда упомянутый угловой коэффициент не превышает упомянутое предварительно заданное значение углового коэффициента, определять, что упомянутый угловой коэффициент имеет нормальное значение; в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, не выполнять наложения с упомянутым крутящим моментом рулевого колеса.
Опционально, упомянутый блок EPS в соответствии с нижеприведенной последовательностью операций рассчитывает упомянутое количество отклонений нарастающим итогом: если упомянутый вспомогательный крутящий момент рулевого управления и/или упомянутый угловой коэффициент крутящего момента рулевого управления имеют отклонение от нормы, то упомянутое количество отклонений нарастающим итогом увеличивается на предустановленное значение; соответственно, если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент крутящего момента рулевого управления имеют нормальное значение, то упомянутое количество отклонений нарастающим итогом уменьшается на упомянутое предустановленное значение. Подсчет упомянутого количества отклонений нарастающим итогом начинается с первого выявленного отклонения от нормы упомянутого вспомогательного крутящего момента рулевого управления и/или его углового коэффициента.
Опционально, реализуется один или несколько из нижеперечисленных вариантов: в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS продолжает оставаться в активном состоянии или переключается из состояния, используемого для управления, в активное состояние; в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS переключается из активного состояния в постоянно отключенное состояние; упомянутый предварительно заданный крутящий момент представляет собой максимальное или минимальное значение диапазона упомянутого предварительно заданного крутящего момента.
Опционально, упомянутый блок EPS также используется для того, чтобы передавать на упомянутый блок DSA данные о текущем состоянии упомянутого блока EPS; когда упомянутый блок EPS находится в активном состоянии или в состоянии, используемом для управления, упомянутый блок DSA передает на упомянутый блок EPS упомянутый запрос на наложение крутящих моментов.
Соответствующим образом, пример реализации данного изобретения также представляет используемый для автомобиля вспомогательный способ управления, который включает в себя следующее: блок DSA выполняет несколько нижеперечисленных последовательных операций: обнаружение особых рабочих условий автомобиля; при обнаружении особых рабочих условий автомобиля - расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS; упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректирует крутящий момент рулевого колеса автомобиля.
Опционально, упомянутый блок DSA может использоваться для циклического выполнения перечисленных последовательных операций; и/или упомянутые особые рабочие условия автомобиля могут подразумевать одно или несколько из нижеперечисленных состояний: избыточная поворачиваемость, недостаточная поворачиваемость, торможение на дороге с разным левым/правым коэффициентом сцепления, ускорение на дороге с разным левым/правым коэффициентом сцепления; условия поворота, когда боковое ускорение превышает предустановленное ускорение.
Опционально, упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления и угловым коэффициентом упомянутого вспомогательного крутящего момента рулевого управления корректирует упомянутый крутящий момент рулевого колеса.
Опционально, в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS используется для того, чтобы выполнять следующую последовательность: если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент имеют нормальное значение, выполнять наложение упомянутого крутящего момента рулевого колеса и упомянутого вспомогательного крутящего момента рулевого управления; если упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение, а упомянутый угловой коэффициент имеет отклонение от нормы, то в соответствии с предварительно заданным значением углового коэффициента и значением крутящего момента последнего наложения рассчитывать текущий необходимый для наложения крутящий момент; если упомянутый вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, а упомянутый угловой коэффициент имеет нормальное значение или отклонение от нормы, то выполнять наложение упомянутого крутящего момента рулевого колеса с предварительно заданным крутящим моментом, при этом направление наложения упомянутого предварительно заданного крутящего момента будет совпадать с направлением наложения упомянутого вспомогательного крутящего момента рулевого управления; в том числе, когда вспомогательный крутящий момент рулевого управления находится в диапазоне предварительно заданного крутящего момента, определять, что упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение; когда упомянутый угловой коэффициент не превышает упомянутое предварительно заданное значение углового коэффициента, определять, что упомянутый угловой коэффициент имеет нормальное значение; в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS не выполняет его наложение с упомянутым крутящим моментом рулевого колеса.
Опционально, упомянутый блок EPS в соответствии с нижеприведенной последовательностью операций рассчитывает упомянутое количество отклонений нарастающим итогом: если упомянутый вспомогательный крутящий момент рулевого управления и/или упомянутый угловой коэффициент крутящего момента рулевого управления имеют отклонение от нормы, то упомянутое количество отклонений нарастающим итогом увеличивается на предустановленное значение; соответственно, если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент крутящего момента рулевого управления имеют нормальное значение, то упомянутое количество отклонений нарастающим итогом уменьшается на упомянутое предустановленное значение; подсчет упомянутого количества отклонений нарастающим итогом начинается с первого выявленного отклонения от нормы упомянутого вспомогательного крутящего момента рулевого управления и/или его углового коэффициента.
Опционально, реализуется один или несколько из нижеперечисленных вариантов: в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS продолжает оставаться в активном состоянии или переключается из состояния, используемого для управления, в активное состояние; в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS переключается из активного состояния в постоянно отключенное состояние, а упомянутый предварительно заданный крутящий момент представляет собой максимальное или минимальное значение диапазона упомянутого предварительно заданного крутящего момента.
Опционально, упомянутый способ также включает в себя следующее: упомянутый блок EPS передает на упомянутый блок DSA данные о текущем состоянии упомянутого блока EPS; когда упомянутый блок EPS находится в активном состоянии или в состоянии, используемом для управления, упомянутый блок DSA передает на упомянутый блок EPS упомянутый запрос на наложение крутящих моментов.
Посредством вышеуказанного технического решения, когда обнаружено, что автомобиль находится в особых рабочих условиях, блок DSA рассчитывает вспомогательный крутящий момент рулевого управления, соответствующий текущим рабочим условиям автомобиля, а блок ESP использует этот вспомогательный крутящий момент рулевого управления, чтобы помочь водителю в управлении автомобилем, корректируя изменение динамического состояния автомобиля так, чтобы он постоянно находился в устойчивом управляемом состоянии; в результате повышается безопасность управления автомобилем и его комфортность.
Другие особенности и преимущества примеров реализации данного изобретения подробно описаны в представленном ниже конкретном примере реализации.
Описание чертежей
Прилагаемые изображения представлены для дополнительного разъяснения содержания данного изобретения, являются составной частью его описания и вместе с представленным ниже примером реализации предназначены для разъяснения этого конкретного примера реализации данного изобретения, но при этом не создают каких-либо ограничений для способов его реализации. Прилагаемые изображения включают в себя:
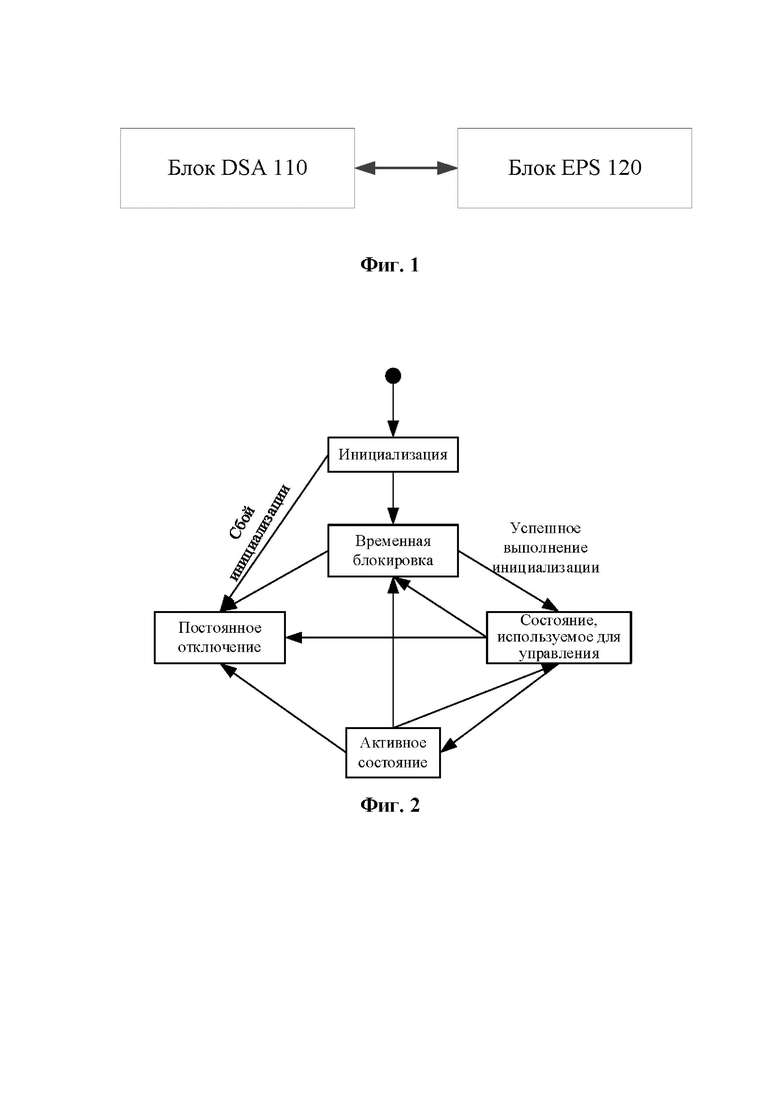
Фиг. 1 представляет собой блок-схему структуры автомобильной вспомогательной системы управления по одному из примеров реализации данного изобретения;
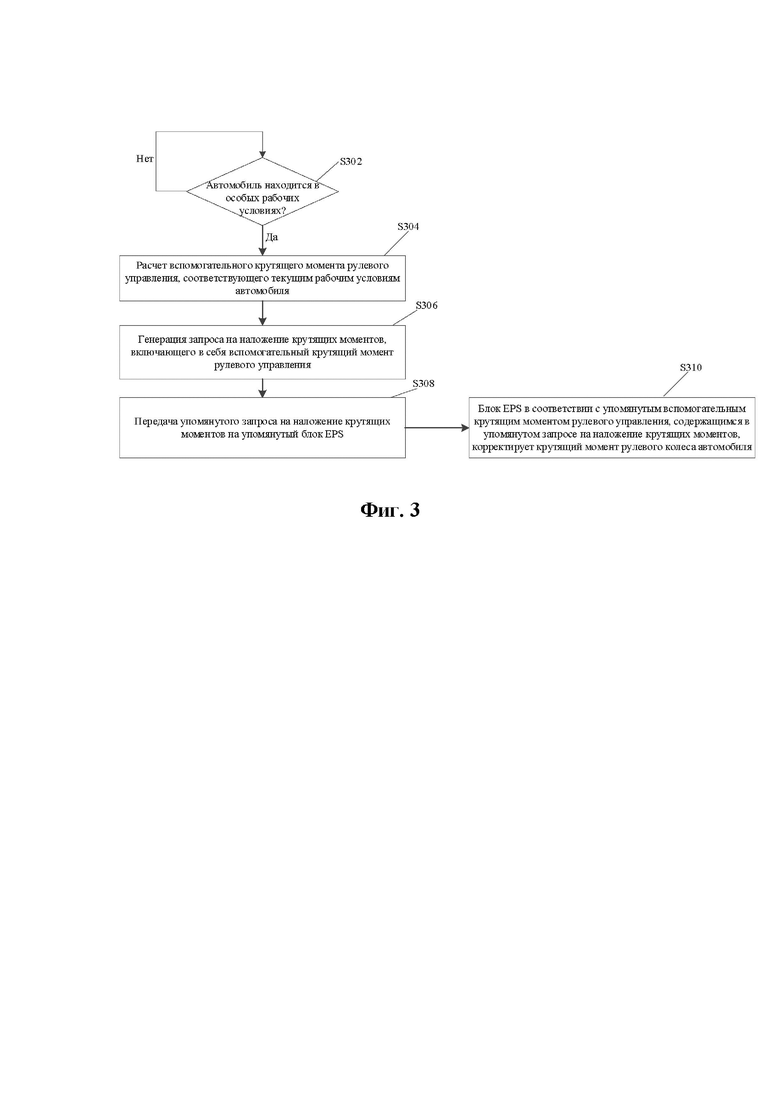
Фиг. 2 представляет собой диаграмму перехода состояний блока EPS по одному из примеров реализации данного изобретения; и
Фиг. 3 представляет собой схему технологического процесса автомобильного вспомогательного способа управления по одному из примеров реализации данного изобретения.
Описание обозначений в прилагаемых изображениях
110 - Блок DSA
120 - Блок EPS
Конкретные варианты осуществления
Ниже с приложением сопроводительных изображений на примере конкретного способа реализации приводится подробное описание данного изобретения. Следует понимать, что все описанные здесь конкретные способы реализации приведены исключительно для описания и разъяснения примеров реализации данного изобретения и не в коей мере не ограничивают сферу его реализации.
При движении автомобиля по дороге с разным левым/правым коэффициентом сцепления (то есть когда левые колеса автомобиля двигаются по дорожному покрытию с низким коэффициентом сцепления, а правые колеса автомобиля двигаются по дорожному покрытию с высоким коэффициентом сцепления, или наоборот, когда правые колеса автомобиля двигаются по дорожному покрытию с низким коэффициентом сцепления, а левые колеса автомобиля двигаются по дорожному покрытию с высоким коэффициентом сцепления) расхождение коэффициентов сцепления колес левой и правой стороны автомобиля с дорожным покрытием приводит к тому, что при торможении или ускорении автомобиля на таком специфическом дорожном покрытии могут возникнуть две нижеописанные ситуации:
(1) При торможении на дороге с разным левым/правым коэффициентом сцепления с дорожным покрытием тормозное давление, действующее на покрытии с высоким коэффициентом сцепления, больше тормозного давления, действующего на покрытии с низким коэффициентом сцепления; это приводит к тому, что на автомобиль начинает действовать поворачивающий момент, направленный в сторону дорожного покрытия с высоким коэффициентом сцепления, который возрастает по мере увеличения расхождения коэффициентов сцепления с дорожным покрытием колес левой и правой стороны автомобиля, при этом вслед за увеличением скорости торможения возрастает скорость рыскания; когда два этих параметра достигают больших значений, водителю становится очень сложно обеспечить устойчивость автомобиля.
(2) При ускорении автомобиля на дороге с разным левым/правым коэффициентом сцепления с дорожным покрытием движущая сила, действующая на покрытии с высоким коэффициентом сцепления, больше движущей силы, действующей на покрытии с низким коэффициентом сцепления; это приводит к тому, что на автомобиль начинает действовать поворачивающий момент, направленный в сторону дорожного покрытия с высоким коэффициентом сцепления; это приводит к повороту автомобиля в сторону покрытия с низким коэффициентом сцепления и необходимости водителю корректировать курс движения с помощью рулевого колеса, чтобы обеспечить прямолинейное движение автомобиля.
В вышеописанных особых ситуациях система ESP посредством управления изменением давления на стороне высокого коэффициента сцепления передней оси и соответствующего понижения давления на стороне низкого коэффициента сцепления передней оси снижает действующий на автомобиль поворачивающий момент; кроме этого, в определенной мере ограничивает давление, оказываемое на заднюю ось, чтобы снизить риск заноса задней части автомобиля, что способствует сохранению его устойчивости. Но, несмотря на это, при использовании торможения в режиме движения автомобиля с высокой скоростью водитель по-прежнему должен заранее принимать точное решение и в сочетании с работой системы контроля устойчивости ESP использовать рулевое колесо, чтобы стабилизировать движение автомобиля; в конечном счете только согласованность и взаимодействие вышеописанной системы ESP и водителя способны снизить риск потери управления автомобилем.
Исходя из этого, пример реализации данного изобретения представляет автомобильную вспомогательную систему и способ управления, которые используются для того, чтобы в особых рабочих условиях автомобиля помочь водителю в управлении автомобилем, корректируя изменение динамического состояния автомобиля так, чтобы он постоянно находился в устойчивом управляемом состоянии; в результате повышается безопасность управления автомобилем.
Фиг. 1 представляет собой блок-схему структуры автомобильной вспомогательной системы управления по примеру реализации данного изобретения. Как показано на Фиг. 1, пример реализации данного изобретения представляет используемые для автомобиля вспомогательную систему управления и способ управления, данная система может включать в себя блок динамической курсовой стабилизации DSA (Dynamic Stable Assistant) 110 и блок электрического усилителя руля EPS (Electric Power Steering) 120.
Блок DSA 110 может являться внутренним блоком системы ESP автомобиля, а также может являться результатом последующей разработки, выполненной на базе аппаратного обеспечения системы ESP. Логическая функция блока DSA 110 может представлять собой дополнительную функцию, спроектированную на базе блока VDC, блока ABS и блока TCS в системе ESP, способную улучшить сферу стратегии управления системы ESP.
В процессе управления автомобилем блок DSA 110 способен в реальном времени или периодически выполнять контроль того, находится ли автомобиль в особых рабочих условиях. Данные особые рабочие условия автомобиля могут подразумевать одно или несколько из нижеперечисленных состояний: избыточная поворачиваемость, недостаточная поворачиваемость, торможение на дороге с разным левым/правым коэффициентом сцепления, ускорение на дороге с разным левым/правым коэффициентом сцепления; условия поворота, когда боковое ускорение превышает предустановленное ускорение.
В соответствии с рассчитанным внутри системы ESP скоростью движения, тормозным давлением главного цилиндра, целевым поворотным моментом и целевым углом бокового увода кузова, а также с учетом порога управления VDS и порога срабатывания TCS модуль DSA может определить, находится ли автомобиль в особых рабочих условиях. Когда блок DSA 110 обнаруживает, что автомобиль находится в особых рабочих условиях, выполняется расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля. Более конкретно, блок DSA 110 получает от расположенных на кузове автомобиля датчиков данные о боковом ускорении, угле поворота рулевого колеса, поворотном моменте кузова и другие параметры; блок EPS 120 также может отправлять на блок DSA 110 обнаруженное значение крутящего момента, введенного водителем. Блок DSA 110, исходя из данных о боковом ускорении, угле поворота рулевого колеса, поворотном моменте кузова и введенном водителем значении крутящего момента рассчитывает вспомогательный крутящий момент рулевого управления. К примеру, 3 основных параметра, передаваемые расположенными на кузове автомобиля датчиками: боковое ускорение, угол поворота рулевого колеса и поворотный момент кузова, могут образовывать базу данных, предназначенную для расчета и оценки динамического индекса. Данный динамический индекс может использоваться для оценки текущей устойчивости автомобиля. Возрастающее значение динамического индекса говорит о возрастающей текущей неустойчивости автомобиля и необходимости увеличения значения крутящего момента, чтобы помочь водителю управлять автомобилем. В блоке DSA 110 может храниться взаимно-однозначно соответствующее текущему значению динамического индекса нужное значение крутящего момента рулевого колеса; чем больше значение динамического индекса, тем больше значение нужного крутящего момента рулевого колеса. После того, как в соответствии с динамическим индексом определен нужный крутящий момент рулевого колеса, далее с учетом введенного водителем значения крутящего момента рассчитывается вспомогательный крутящий момент рулевого управления, соответствующий текущим рабочим условиям автомобиля. Рассчитанный вспомогательный крутящий момент рулевого управления может включать в себя «+» и «-», в том числе использование «+» означает направление против часовой стрелки, а использование «-» означает направление по часовой стрелке. Например, значение вспомогательного крутящего момента рулевого управления -1NM указывает на ожидание того, что рулевое колесо будет повернуто в направлении по часовой стрелке на 1 нм.
После расчета вспомогательного крутящего момента рулевого управления генерируется запрос на наложение крутящих моментов, включающий в себя вспомогательный крутящий момент рулевого управления. Опционально, в блоке DSA 110 может храниться диапазон вспомогательных крутящих моментов рулевого управления, соответствующих каждому особому рабочему условию. В этом случае генерация запроса на наложение крутящих моментов будет возможна только в ситуации, когда рассчитанное значение вспомогательного крутящего момента рулевого управления находится в соответствующем диапазоне крутящих моментов рулевого управления. Пока рассчитанное значение вспомогательного крутящего момента рулевого управления не находится в соответствующем диапазоне крутящих моментов рулевого управления, запрос на наложение крутящих моментов не генерируется, блок DSA 110 продолжает контроль рабочих условий автомобиля.
Блок DSA 110 может передавать сгенерированный вопрос на наложение крутящих моментов на блок ESP 120, например, по шине CAN. Блок ESP 120 в соответствии с содержащимся в запросе на наложение крутящих моментов значением вспомогательного крутящего момента рулевого управления регулирует крутящий момент рулевого колеса. Опционально, данный запрос на наложение крутящих моментов также может содержать метку запроса команды на наложение крутящих моментов. В ситуации, когда запрос на наложение крутящих моментов содержит и метку запроса команды на наложение крутящих моментов, и вспомогательный крутящий момент рулевого управления, блок EPS 120, исходя из значения вспомогательного крутящего момента рулевого управления, корректирует крутящий момент рулевого колеса. Корректировка крутящего момента рулевого колеса выполняется исходя из значения вспомогательного крутящего момента рулевого управления, чтобы в особых рабочих условиях автомобиля помочь водителю в управлении автомобилем, корректируя изменение динамического состояния автомобиля так, чтобы он постоянно находился в устойчивом управляемом состоянии; в результате повышается безопасность управления автомобилем.
Опционально, функционал блока DSA может включаться и выключаться с помощью выключателя, например, водителем. Выключатель блока DSA может представлять собой кнопку, расположенную на панели приборов управления автомобилем, с помощью которой водитель может включать и выключать блок DSA. Либо может представлять собой опцию включения/выключения блока DSA, отображаемую на сенсорном дисплее главной бортовой системы автомобиля, с помощью которой водитель может включать и выключать блок DSA.
Фиг. 2 представляет собой диаграмму перехода состояний блока EPS по одному из примеров реализации данного изобретения. Как показано на Фиг. 2, после подачи электропитания блок EPS сначала проходит фазу инициализации. В случае сбоя инициализации блок EPS входит в постоянно отключенное состояние. Когда блок EPS входит в постоянно отключенное состояние, он подает сигнал об отклонении от нормы. В процессе инициализации блок EPS находится во временно отключенном состоянии. Если инициализация пройдена успешно, то он входит в состояние, используемое для управления, а затем после активного возбуждения входит в активное состояние. Блок EPS может в соответствии с условиями переключения внутреннего переключателя состояний переключаться в соответствующее состояние. Блок EPS может передавать на блок DSA сигнал о текущем состоянии блока EPS. Например, упомянутое текущее состояние EPS_DSA_ControlSts означает, что между блоком EPS и блоком DSA по шине CAN осуществляется передача данных.
В ситуации, когда текущее состояние блока EPS является состоянием, используемым для управления, или активным состоянием, блок DSA передает на блок EPS запрос на наложение крутящих моментов. В данном запросе на наложение может использоваться DSA_Torque_Request, который означает рассчитанный блоком вспомогательной крутящий момент рулевого управления. Использование DSA_Active означает метку запроса команды на наложение крутящих моментов. Блок EPS в соответствии с полученным значением вспомогательного крутящего момента рулевого управления и угловым коэффициентом упомянутого вспомогательного крутящего момента рулевого управления корректирует крутящий момент рулевого колеса.
Более конкретно, в зависимости от наличия/отсутствия отклонения от нормы полученного вспомогательного крутящего момента рулевого управления, наличия/отсутствия отклонения от нормы углового коэффициента вспомогательного крутящего момента рулевого управления, а также в зависимости от общего количества отклонений нарастающим итогом упомянутого вспомогательного крутящего момента рулевого управления и/или углового коэффициента упомянутого вспомогательного крутящего момента рулевого управления, блок EPS корректирует крутящий момент рулевого колеса. Когда вспомогательный крутящий момент рулевого управления находится в диапазоне предварительно заданного крутящего момента, это определяется как нормальное значение упомянутого вспомогательного крутящего момента рулевого управления. Когда вспомогательный крутящий момент рулевого управления выходит из диапазона предварительно заданного крутящего момента, это определяется как отклонение от нормы упомянутого вспомогательного крутящего момента рулевого управления. При этом диапазон предварительно заданного крутящего момента может быть задан любыми подходящими значениями в соответствии с фактической ситуацией; например, диапазон предварительно заданного крутящего момента может составлять от -3 нм до +3 нм, включая обе крайних точки, -3 нм и +3 нм. Когда упомянутый угловой коэффициент не превышает предварительно заданного значения углового коэффициента, это определяется как нормальное значение упомянутого углового коэффициента. Когда упомянутый угловой коэффициент превышает предварительно заданного значения углового коэффициента, это определяется как отклонение от нормы упомянутого углового коэффициента. При этом предварительно заданное значение углового коэффициента может быть задано любым подходящим значением в соответствии с фактической ситуацией и может отличаться в зависимости от модели автомобиля; например, предварительно заданное значение углового коэффициента может составлять 10 нм/с. Чтобы получить значение углового коэффициента вспомогательного крутящего момента рулевого управления, можно разность текущего полученного вспомогательного крутящего момента рулевого управления и предыдущего полученного вспомогательного крутящего момента рулевого управления разделить на разницу времени получения текущего и предыдущего вспомогательных крутящих моментов рулевого управления; либо сначала высчитать разность текущего полученного вспомогательного крутящего момента рулевого управления с предыдущим наложенным блоком EPS крутящим моментом рулевого колеса, а затем полученную разность разделить на разницу времени получения текущего и предыдущего вспомогательных крутящих моментов рулевого управления.
Блок EPS посредством задействования функции мониторинга и учета отклонений может осуществлять подсчет общего количества отклонений нарастающим итогом, то есть, когда блок EPS находится в активном состоянии или состоянии, используемом для управления, при получении от блока DSA вспомогательного крутящего момента рулевого управления с отклонением от нормы и/или его углового коэффициента с отклонением от нормы начинается подсчет общего количества отклонений нарастающим итогом.
После обнаружения первого отклонения вспомогательного крутящего момента рулевого управления и/или его углового коэффициента начинается подсчет общего количества отклонений нарастающим итогом; например, при обнаружении первого отклонения число зафиксированных отклонений нарастающим итогом может равняться 1. В процессе подсчета при обнаружении отклонения вспомогательного крутящего момента рулевого управления и/или отклонения его углового коэффициента общее количество отклонений нарастающим итогом увеличивается на предустановленное значение; при обнаружении нормального значения вспомогательного крутящего момента рулевого управления и/или нормального значения его углового коэффициента общее количество отклонений нарастающим итогом уменьшается на предустановленное значение. Предустановленное значение в соответствии с необходимостью может быть задано любым подходящим значением. Для иллюстрации примера реализации данного изобретения предустановленное значение задано как 1.
Ниже представлен пояснительный пример подсчета общего количества отклонений нарастающим итогом, в котором предустановленное значение в качестве примера задано как 1.
Когда блок EPS в процессе мониторинга получаемых от блока DSA значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента впервые обнаруживает отклонение от нормы любого одного из двух этих параметров, начинается подсчет общего количества отклонений нарастающим итогом; в этот момент количество отклонений нарастающим итогом фиксируется как 1. Блок EPS продолжает непрерывно осуществлять мониторинг получаемых от блока DSA значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента.
Когда блок EPS в процессе мониторинга получаемых от блока DSA значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента повторно обнаруживает отклонение от нормы любого одного из двух этих параметров, количество отклонений нарастающим итогом фиксируется как 1+1=2. Когда в процессе мониторинга значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента в третий раз обнаруживается отклонение от нормы любого одного из двух этих параметров, количество отклонений нарастающим итогом фиксируется как 1+1+1=3, далее по аналогии. При обнаружении в процессе мониторинга значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента отклонения от нормы любого из двух этих параметров происходит увеличение общего количества отклонений нарастающим итогом. Когда блок EPS в процессе мониторинга в четвертый раз получаемых от блока DSA значений вспомогательного крутящего момента рулевого управления и значений углового коэффициента этого вспомогательного крутящего момента обнаруживает, что оба параметра имеют отклонение от нормы, то количество отклонений нарастающим итогом фиксируется как 1+1+1-1=2.
Блок EPS в соответствии с вышеописанной стратегией управления, исходя из отклонения или нормы текущего получаемого от блока DSA значения вспомогательного крутящего момента рулевого управления и значения углового коэффициента этого вспомогательного крутящего момента, увеличивает или уменьшает общее количество отклонений нарастающим итогом.
В ситуации, когда общее количество отклонений нарастающим итогом меньше предварительно заданного количества, блок EPS, в зависимости от отклонения или нормы текущего получаемого от блока DSA значения вспомогательного крутящего момента рулевого управления и значения углового коэффициента этого вспомогательного крутящего момента, может выполнять разные последовательности действий.
Если вспомогательный крутящий момент рулевого управления и угловой коэффициент этого вспомогательного крутящего момента имеют нормальное значение, то на крутящий момент рулевого колеса накладывается полученный от блока DSA упомянутый вспомогательный крутящий момент рулевого управления.
Если вспомогательный крутящий момент рулевого управления имеет нормальное значение, а угловой коэффициент этого вспомогательного крутящего момента имеет отклонение от нормы, то в соответствии с предварительно заданным значением углового коэффициента и значением крутящего момента последнего наложения рассчитывается текущий необходимый для наложения крутящий момент; для расчета текущего необходимого для наложения крутящего момента можно использовать приведенный выше метод расчета углового коэффициента. Например, если предварительно заданное значение углового коэффициента составляет k=10 нм/с, последний наложенный блоком EPS на рулевое колесо крутящий момент составляет Tor1 = +0,78 нм, а разница времени получения текущего и предыдущего вспомогательных крутящих моментов рулевого управления составляет ΔT=0,2 с, то текущий необходимый для наложения крутящий момент составит Tor0=k* ΔT + Tor1 =10 нм/с*0,2 с +(+0,78 нм) =+2,78 нм.
Если вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, а угловой коэффициент этого вспомогательного крутящего момента имеет нормальное значение или отклонение от нормы, то на крутящий момент рулевого колеса накладывается предварительно заданный крутящий момент, при этом направление наложения упомянутого предварительно заданного крутящего момента будет совпадать с направлением наложения полученного от блока DSA упомянутого вспомогательного крутящего момента рулевого управления. Предварительно заданный крутящий момент в примере реализации данного изобретения может в соответствии с логической необходимостью быть задан любым подходящим значением; опционально, может быть задан максимальным или минимальным значением диапазона предварительно заданного крутящего момента. Например, если диапазон предварительно заданного крутящего момента составит от -3 нм до +3 нм, включая обе крайних точки, -3 нм и +3 нм, а значение полученного блока DSA вспомогательного крутящего момента рулевого управления составит -5 нм, то блок EPS после обнаружения того, что вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, вне зависимости от отклонения или нормы углового коэффициента вспомогательного крутящего момента выполнит наложение на рулевое колесо крутящего момента в значении -3 нм. Если значение полученного блока DSA вспомогательного крутящего момента рулевого управления составит +5 нм, то блок EPS после обнаружения того, что вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, вне зависимости от отклонения или нормы углового коэффициента вспомогательного крутящего момента выполнит наложение на рулевое колесо крутящего момента в значении +3 нм.
Когда общее количество отклонений нарастающим итогом меньше предустановленного количества, блок EPS, исходя из вышеописанной стратегии, выполняет наложение крутящего момента на рулевое колесо, делая вспомогательную регулировку рулевого колеса более линейной и стабильной.
Далее, когда общее количество отклонений нарастающим итогом меньше предустановленного количества, блок EPS может оставаться в активном состоянии или переключаться из состояния, используемого для управления, в активное состояние. В том числе, если блок EPS в определенный момент находится в состоянии, используемом для управления, и при этом после получения от блока DSA значения вспомогательного крутящего момента рулевого управления определяет, что общее количество отклонений нарастающим итогом меньше предустановленного количества, то блок переключается из состояния, используемого для управления, в активное состояние.
Если после получения от блока DSA значения вспомогательного крутящего момента рулевого управления блок EPS определяет, что текущее общее количество отклонений нарастающим итогом равно предустановленному количеству, блок EPS не выполняет корректировку крутящего момента рулевого колеса, и при этом может переключаться из активного состояния в постоянно отключенное состояние; в этой ситуации блок EPS также может подавать сигнал об отклонении от нормы. Упомянутое предустановленное количество в примере реализации данного изобретения может в соответствии с фактической необходимостью быть задано любым соответствующим значением. Для иллюстрации примера реализации данного изобретения предустановленное количество задано как 5.
В Таблице 1 представлены логические данные срабатывания сигнала об отклонении от нормы. В строке «Отклонения» в Таблице 1 значение «1» означает отклонение, значение «0» означает отсутствие обнаруженного отклонения. В строке «Подача сигнала об отклонении» значение «0» означает «не подавать сигнал об отклонении», значение «1» означает «подавать сигнал об отклонении». Логический алгоритм из Таблицы 1 представляет требования, предъявляемые к характеристикам устойчивости функциональной системы блока DSA. Следует уяснить, что Таблица 1 используется исключительно в качестве примера и ни в какой степени не ограничивает данное изобретение. В качестве логической таблицы подачи сигнала об отклонении может быть использована любая таблица без каких-либо ограничений для порядковых номеров.
Таблица 1
Представленная в примере реализации данного изобретения используемая для автомобиля вспомогательная система управления имеет следующие преимущества: (1) на базе настроенного функционала блока DSA впервые представляет каркас взаимодействия между системой ESP и блоком EPS, восполняя имеющийся на современном автомобильном рынке пробел отсутствия вариантов комплектации с функцией взаимодействия систем ESP и EPS; (2) удовлетворены более высокие требования к характеристикам и безопасности, предъявляемые потребителями к характеристикам автомобиля, взаимодействие между блоками управления автомобиля стало более оперативным, блок DSA в составе системы ESP подает команды блоку EPS, чтобы помочь водителю в управлении автомобилем, это повышает безопасность и комфортность водителя; (2) для блока EPS создана логическая стратегия мониторинга отклонений, которая восполняет пробел в логике мониторинга текущего крутящего момента, имеет более высокую надежность и гораздо более высокую устойчивость; (3) представленная в примере реализации данного изобретения логика управления применима в часто встречающихся особых рабочих условиях автомобиля, в том числе в таких неблагоприятных погодных условиях, как снежная погода на северо-востоке и дождливая погода на юге, когда на сухом асфальтовом покрытии могут формироваться участки снежного покрова и воды; после включения блока DSA он помогает водителю вести автомобиль и позволяет ему почувствовать большую свободу в управлении; (4) представленная в примере реализации данного изобретения логика управления воплощает рациональность развития функционала автомобиля и уровень интеллектуализации дизайна, повышает конкурентоспособность отечественных автомобилей перед автомобилями иностранного и совместного производства и в полной мере отображает высокие функциональные способности отечественных автомобилей.
Фиг. 3 представляет собой схему технологического процесса используемого для автомобиля вспомогательного способа управления по одному из примеров реализации данного изобретения. Как показано на Фиг. 3, пример реализации данного изобретения также представляет используемый для автомобиля вспомогательный способ управления, который включает в себя следующее: блок DSA выполняет несколько нижеперечисленных последовательных операций. Шаг S302: обнаружение особых рабочих условий автомобиля; шаг S304: при обнаружении особых рабочих условий автомобиля - расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; шаг S306: генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; шаг S308: передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS; и выполняемый блоком EPS шаг S310: упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректирует крутящий момент рулевого колеса автомобиля. Корректировка крутящего момента рулевого колеса, исходя из значения вспомогательного крутящего момента рулевого управления, выполняется, чтобы помочь водителю в управлении автомобилем, когда автомобиль находится в особых рабочих условиях, корректируя изменение динамического состояния автомобиля так, чтобы он постоянно находился в устойчивом управляемом состоянии; в результате повышается безопасность управления автомобилем.
Принцип работы и преимущества представленного в примере реализации данного изобретения автомобильного вспомогательного способа управления схожи с принципом работы и преимуществами представленной в примере реализации данного изобретения автомобильной вспомогательной системы управления и здесь подробно не описываются.
Представленные выше сопроводительные изображения подробно описывают возможный способ реализации примера реализации данного изобретения. Однако, примеры реализации данного изобретения ни в коей мере не ограничиваются конкретными деталями, упомянутыми в вышеуказанном способе реализации. В сфере технического замысла примера реализации данного изобретения техническое решение по примеру реализации данного изобретения может быть подвергнуто разным несложным изменениям и модификациям, которые в полной мере относятся в области защиты примера реализации данного изобретения.
Кроме этого, необходимо пояснить, что конкретные технические характеристики, описанные в вышеупомянутом конкретном способе реализации, при отсутствии противоречий можно сочетать любыми подходящими способами. Чтобы избежать ненужных повторов, в примере реализации данного изобретения не приводится отдельного описания возможных способов их сочетания.
Рядовой технический персонал данной технической сферы должен понимать, что все или часть шагов последовательности, реализующих способ в вышеприведенном примере реализации, могут быть реализованы с помощью соответствующих аппаратных средств, назначаемых программой, которая хранится в среде для хранения информации и содержит несколько команд, позволяющих одночиповому микрокомпьютеру, микросхеме или процессору (processor) выполнять все или часть шагов последовательности упомянутого способа по примерам реализации данной заявки. Вышеупомянутая среда для хранения информации включает в себя: U-накопитель, переносной жесткий диск, постоянное запоминающее устройство (ROM, Read-Only Memory), запоминающее устройство с произвольным доступом (RAM, Random Access Memory), дискету, CD-диск или иную среду для хранения программного кода.
Кроме этого, между разными способами реализации примера реализации данного изобретения также возможны различные сочетания. Необходимо лишь, чтобы такие сочетания не нарушали идею примера реализации данного изобретения и в равной мере соответствовали содержанию, опубликованном в примере реализации данного изобретения.
Группа изобретений относится к автомобильной сфере и представляет используемые для автомобиля вспомогательную систему управления и способ управления. Автомобильная вспомогательная система управления включает в себя вспомогательный блок динамической курсовой стабилизации DSA и блок электроусилителя руля EPS. Блок DSA используется для выполнения нескольких нижеперечисленных последовательных операций: обнаружение особых рабочих условий автомобиля; при обнаружении особых рабочих условий автомобиля – расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS. Блок EPS используется для того, чтобы в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректировать крутящий момент рулевого колеса автомобиля. Достигается возможность обеспечения постоянного нахождения автомобиля в устойчивом управляемом состоянии, в результате чего повышается безопасность автомобиля и комфортность водителя. 2 н. и 12 з.п. ф-лы, 3 ил., 1 табл.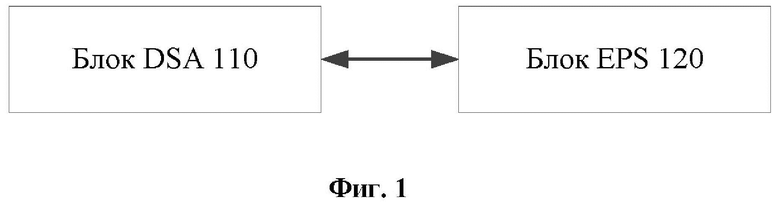
1. Автомобильная вспомогательная система управления, характеризующаяся тем, что включает в себя следующее: вспомогательный блок динамической курсовой стабилизации DSA и блок электроусилителя руля EPS;
упомянутый блок DSA используется для выполнения нескольких нижеперечисленных последовательных операций: обнаружение особых рабочих условий автомобиля; при обнаружении особых рабочих условий автомобиля – расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS;
упомянутый блок EPS используется для того, чтобы в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректировать крутящий момент рулевого колеса автомобиля.
2. Упомянутая система в соответствии с п. 1, характеризующаяся тем, что:
упомянутый блок DSA может использоваться для циклического выполнения нижеперечисленных последовательных операций; и/или
упомянутые особые рабочие условия автомобиля могут подразумевать одно или несколько из нижеперечисленных состояний: избыточная поворачиваемость, недостаточная поворачиваемость, торможение на дороге с разным левым/правым коэффициентом сцепления, ускорение на дороге с разным левым/правым коэффициентом сцепления; условия поворота, когда боковое ускорение превышает предустановленное ускорение.
3. Упомянутая система в соответствии с п. 1, характеризующаяся тем, что упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления и угловым коэффициентом упомянутого вспомогательного крутящего момента рулевого управления корректирует упомянутый крутящий момент рулевого колеса.
4. Упомянутая система в соответствии с п. 3, характеризующаяся тем, что упомянутый модуль EPS используется для того, чтобы:
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, выполнять следующую последовательность: если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент имеют нормальное значение, выполнять наложение упомянутого крутящего момента рулевого колеса и упомянутого вспомогательного крутящего момента рулевого управления; если упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение, а упомянутый угловой коэффициент имеет отклонение от нормы, то в соответствии с предварительно заданным значением углового коэффициента и значением крутящего момента последнего наложения рассчитывать текущий необходимый для наложения крутящий момент; если упомянутый вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, а упомянутый угловой коэффициент имеет нормальное значение или отклонение от нормы, то выполнять наложение упомянутого крутящего момента рулевого колеса с предварительно заданным крутящим моментом, при этом направление наложения упомянутого предварительно заданного крутящего момента будет совпадать с направлением наложения упомянутого вспомогательного крутящего момента рулевого управления; в том числе, когда вспомогательный крутящий момент рулевого управления находится в диапазоне предварительно заданного крутящего момента, определять, что упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение; когда упомянутый угловой коэффициент не превышает упомянутое предварительно заданное значение углового коэффициента, определять, что упомянутый угловой коэффициент имеет нормальное значение;
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, не выполнять наложения с упомянутым крутящим моментом рулевого колеса.
5. Упомянутая система в соответствии с п. 4, характеризующаяся тем, что упомянутый блок EPS в соответствии с нижеприведенной последовательностью операций рассчитывает упомянутое количество отклонений нарастающим итогом:
если упомянутый вспомогательный крутящий момент рулевого управления и/или упомянутый угловой коэффициент крутящего момента рулевого управления имеют отклонение от нормы, то упомянутое количество отклонений нарастающим итогом увеличивается на предустановленное значение; а также
если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент крутящего момента рулевого управления имеют нормальное значение, то упомянутое количество отклонений нарастающим итогом уменьшается на упомянутое предустановленное значение;
подсчет упомянутого количества отклонений нарастающим итогом начинается с первого выявленного отклонения от нормы упомянутого вспомогательного крутящего момента рулевого управления и/или его углового коэффициента.
6. Упомянутая система в соответствии с п. 4 или 5, характеризующаяся тем, что реализуется один или несколько из нижеперечисленных вариантов:
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS продолжает оставаться в активном состоянии или переключается из состояния, используемого для управления, в активное состояние;
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS переключается из активного состояния в постоянно отключенное состояние;
а упомянутый предварительно заданный крутящий момент представляет собой максимальное или минимальное значение диапазона упомянутого предварительно заданного крутящего момента.
7. Упомянутая система в соответствии с п. 1, характеризующаяся тем, что упомянутый блок EPS также используется для того, чтобы передавать на упомянутый блок DSA данные о текущем состоянии упомянутого блока EPS; когда упомянутый блок EPS находится в активном состоянии или в состоянии, используемом для управления, упомянутый блок DSA передает на упомянутый блок EPS упомянутый запрос на наложение крутящих моментов.
8. Автомобильный вспомогательный способ управления, характеризующийся тем, что включает в себя следующее:
блок DSA выполняет нескольких нижеперечисленных последовательных операций: обнаружение особых рабочих условий автомобиля; при обнаружении особых рабочих условий автомобиля расчет вспомогательного крутящего момента рулевого управления, соответствующего текущим рабочим условиям автомобиля; генерация запроса на наложение крутящих моментов, содержащего упомянутый вспомогательный крутящий момент рулевого управления; передача упомянутого запроса на наложение крутящих моментов на упомянутый блок EPS;
упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления, содержащимся в упомянутом запросе на наложение крутящих моментов, корректирует крутящий момент рулевого колеса автомобиля.
9. Упомянутый способ в соответствии с п. 8, характеризующийся тем, что
упомянутый блок DSA может использоваться для циклического выполнения нижеперечисленных последовательных операций; и/или
упомянутые особые рабочие условия автомобиля могут подразумевать одно или несколько из нижеперечисленных состояний: избыточная поворачиваемость, недостаточная поворачиваемость, торможение на дороге с разным левым/правым коэффициентом сцепления, ускорение на дороге с разным левым/правым коэффициентом сцепления; условия поворота, когда боковое ускорение превышает предустановленное ускорение.
10. Упомянутый способ в соответствии с п. 8, характеризующийся тем, что упомянутый блок EPS в соответствии с упомянутым вспомогательным крутящим моментом рулевого управления и угловым коэффициентом упомянутого вспомогательного крутящего момента рулевого управления корректирует упомянутый крутящий момент рулевого колеса.
11. Упомянутый способ в соответствии с п. 8, характеризующийся тем, что
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS используется для того, чтобы выполнять следующую последовательность: если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент имеют нормальное значение, выполнять наложение упомянутого крутящего момента рулевого колеса и упомянутого вспомогательного крутящего момента рулевого управления; если упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение, а упомянутый угловой коэффициент имеет отклонение от нормы, то в соответствии с предварительно заданным значением углового коэффициента и значением крутящего момента последнего наложения рассчитывать текущий необходимый для наложения крутящий момент; если упомянутый вспомогательный крутящий момент рулевого управления имеет отклонение от нормы, а упомянутый угловой коэффициент имеет нормальное значение или отклонение от нормы, то выполнять наложение упомянутого крутящего момента рулевого колеса с предварительно заданным крутящим моментом, при этом направление наложения упомянутого предварительно заданного крутящего момента будет совпадать с направлением наложения упомянутого вспомогательного крутящего момента рулевого управления; в том числе, когда вспомогательный крутящий момент рулевого управления находится в диапазоне предварительно заданного крутящего момента, определять, что упомянутый вспомогательный крутящий момент рулевого управления имеет нормальное значение; когда упомянутый угловой коэффициент не превышает упомянутое предварительно заданное значение углового коэффициента, определять, что упомянутый угловой коэффициент имеет нормальное значение;
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS не выполняет наложения с упомянутым крутящим моментом рулевого колеса.
12. Упомянутый способ в соответствии с п. 11, характеризующийся тем, что упомянутый блок EPS в соответствии с нижеприведенной последовательностью операций рассчитывает упомянутое количество отклонений нарастающим итогом:
если упомянутый вспомогательный крутящий момент рулевого управления и/или упомянутый угловой коэффициент крутящего момента рулевого управления имеют отклонение от нормы, то упомянутое количество отклонений нарастающим итогом увеличивается на предустановленное значение; соответственно,
если упомянутый вспомогательный крутящий момент рулевого управления и упомянутый угловой коэффициент крутящего момента рулевого управления имеют нормальное значение, то упомянутое количество отклонений нарастающим итогом уменьшается на упомянутое предустановленное значение;
подсчет упомянутого количества отклонений нарастающим итогом начинается с первого выявленного отклонения от нормы упомянутого вспомогательного крутящего момента рулевого управления и/или его углового коэффициента.
13. Упомянутый способ в соответствии с п. 11 или 12, характеризующийся тем, что реализуется один или несколько из нижеперечисленных вариантов:
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом меньше предустановленного количества отклонений, упомянутый блок EPS продолжает оставаться в активном состоянии или переключается из состояния, используемого для управления, в активное состояние;
в ситуации, когда общее количество отклонений упомянутого вспомогательного крутящего момента рулевого управления и/или упомянутого углового коэффициента вспомогательного крутящего момента рулевого управления нарастающим итогом равно упомянутому предустановленному количеству отклонений, упомянутый блок EPS переключается из активного состояния в постоянно отключенное состояние;
а упомянутый предварительно заданный крутящий момент представляет собой максимальное или минимальное значение диапазона упомянутого предварительно заданного крутящего момента.
14. Способ, упомянутый в п. 8, характеризующийся тем, что также включает в себя следующее:
упомянутый блок EPS передает на упомянутый блок DSA данные о текущем состоянии упомянутого блока EPS;
когда упомянутый блок EPS находится в активном состоянии или в состоянии, используемом для управления, упомянутый блок DSA передает на упомянутый блок EPS упомянутый запрос на наложение крутящих моментов.
| CN 102264593 A, 30.11.2011 | |||
| CN 107571909 A, 12.01.2018 | |||
| EP 1508500 A1, 23.02.2005 | |||
| JP 2015143483 A, 06.08.2015 | |||
| US 2018178838 A1, 28.06.2018. |

