Область техники, к которой относится изобретение.
Данная группа изобретений относится к способам проведения чрескожной сосудистой пункции, при котором используют ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, визуализируют кровеносный сосуд и ее пунктируют, для чего через пункционную иглу вводят в кровеносный сосуд направляющий проводник, а также к соответствующим системам, реализующим способ.
В качестве кровеносного сосуда подразумевается артерия или вена.
В качестве пункционной иглы подразумевается также любой аналог пункционной иглы, позволяющий проведение чрескожной сосудистой пункции.
Уровень техники.
В настоящее время большинство эндоваскулярных диагностических и лечебных операций на сердце выполняется через лучевую артерию руки в зоне запястья. Методика отработана, но небольшой диаметр кровеносного сосуда постоянно создаёт трудности врачу во время пункции. Иногда бывает сложно пропальпировать пульсирующую артерию. С целью визуализации кровеносного сосуда и прицельной пункции используют ультразвуковой сканнер. В реальной жизни врач левой рукой держит датчик, правой рукой - пункционную иглу и при этом поворачивает голову, чтобы посмотреть на экран ультразвукового аппарата. Таким образом, он пытается скоординировать различные движения и удаленные друг от друга поля зрения. Эти неудобства ограничивают применение ультразвукового аппарата, хотя, когда врач видит артерию, ему удаётся выполнить аккуратную пункцию проникая иглой в просвет кровеносного сосуда, не повреждая его заднюю стену. Это имеет отношение и к сосудистым пункциям другой локализации, например, бедренной артерии или подключичной вены.
Например, такой способ для чрескожной сосудистой пункции, при котором используют ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, визуализируют артерию и ее пунктируют, для чего через пункционную иглу вводят в артерию направляющий проводник, описан в патенте на изобретение РФ № 2741465, который опубликован: 26.01.2021.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Основным недостатком этого прототипа является определенное неудобство проведения чрескожной сосудистой пункции. Это связано с тем, что врачу надо контролировать и введение пункционной иглы, и контролировать положении кровеносного сосуда на экране ультразвукового сканнера держа ультразвуковой датчик, все изображения при этом разнесены в пространстве.
Из уровня техники известна система для чрескожной сосудистой пункции, включающая ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, такая система описана в патенте на изобретение РФ № 2741465, который опубликован: 26.01.2021.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как системы.
Основным недостатком этого прототипа также является техническая сложность проведения чрескожной сосудистой пункции и связанный с этим повышенный риск повреждения задней стенки кровеносного сосуда, кровотечения и гематомы. Это связано с неудобством проведения чрескожной сосудистой пункции, а именно с тем, что врачу надо контролировать и введение пункционной иглы, и контролировать положении кровеносного сосуда на экране ультразвукового сканнера держа ультразвуковой датчик одной рукой, а пункционную иглу в другой, при этом экран ультразвукового сканнера и операционное поле разнесены в пространстве. Так же врачу сложно зафиксировать ультразвуковое изображение сосуда в реальном времени.
Раскрытие изобретения
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ для чрескожной сосудистой пункции и/или других эндоваскулярных манипуляций, при котором используют ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, визуализируют кровеносный сосуд и ее пунктируют, для чего через пункционную иглу вводят в кровеносный сосуд направляющий проводник, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно позволяет обеспечить повышение точности чрескожной сосудистой пункции, снижение риска осложнений, например, повреждения задней стенки кровеносного сосуда, что и является поставленной задачей.
Для достижения этой задачи способ включает в себя также этапы, при которых:
a. передают изображение положения кровеносного сосуда и пункционной иглы с ультразвукового сканера на очки дополненной реальности, которые располагают на голове врача, при этом используют очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы,
b. контролируют правильное внутрисосудистое положение направляющего проводника или эндоваскулярных инструментов для чего управляют перемещением ультразвукового сканера.
Благодаря данным выгодным характеристикам появляется возможность обеспечения одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы и/или других эндоваскулярных инструментов и самой области введения пункционной иглы, а также автоматического перемещения сканера для контроля правильного внутрисосудистого положения направляющего проводника и/или других эндоваскулярных инструментов. Врач при этом все держит в одном поле зрения, не отвлекается и не совершает лишних движений руками и головой.
Существует преимущественный вариант исполнения данного способа, при котором управляют перемещением ультразвукового сканера, при котором он плавно смещается проксимально вдоль руки пациента.
Благодаря данным выгодным характеристикам появляется возможность плавного смещения ультразвукового сканера относительно места эндоваскулярной манипуляции
Существует также вариант исполнения данного способа, при котором управляют перемещением ультразвукового сканера, при помощи ножного блока управления.
Благодаря данным выгодным характеристикам появляется возможность управления перемещением ультразвукового сканера при помощи ножного блока управления, что позволяет не использовать для этого руки врача.
Кроме того, существует также и такой вариант исполнения данного способа, при котором управляют перемещением ультразвукового сканера при помощи пульта управления. В качестве такого пульта управления может быть использован джойстик.
Благодаря данным выгодным характеристикам появляется возможность управления перемещением ультразвукового сканера при помощи пульта управления, что позволяет не использовать для этого руки врача. Пультом может управлять ассистент.
Существует ещё один вариант исполнения данного способа, при котором управляют перемещением ультразвукового сканера при помощи голосового управления.
Благодаря данным выгодным характеристикам появляется возможность управления перемещением ультразвукового сканера при помощи голосового управления, что также позволяет не использовать для этого руки врача. Также им может управлять ассистент.
Существует также и такой один вариант исполнения данного способа, при котором управляют перемещением ультразвукового сканера при помощи технологии с точным отслеживанием положения руки в режиме реального времени.
Благодаря данным выгодным характеристикам появляется возможность применения технологии с точным отслеживанием положения руки в режиме реального времени. Такие технологии известны, один из вариантов описан, например, как Utraleap (Ультралип) см сайт https://www.ultraleap.com/.
Существенным является то, что врач не касается блока управления ультразвукового сканера, что особенно актуально так как снижает риск контаминации операционного поля.
Наконец, существует также и такой один вариант исполнения данного способа, при котором располагают ультразвуковой сканер на многоосевом механическом роботе-манипуляторе.
Благодаря данным выгодным характеристикам появляется возможность многовариантного управления положением ультразвукового сканера в любом положении в пространстве.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для систем аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области.
Настоящее изобретение, также имеет целью предложить систему для чрескожной сосудистой пункции, включающую ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить повышение точности чрескожной сосудистой пункции, снижение риска осложнений, например, повреждения задней стенки кровеносного сосуда, что и является поставленной задачей.
Для достижения этой цели настоящее изобретение также включает в себя очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы, а также система включает в себя привод перемещения ультразвукового сканера.
Благодаря данным выгодным характеристикам появляется возможность одновременного нахождения в поле зрения врача и изображений положения артерии и пункционной иглы, и самой области введения пункционной иглы, а появляется возможность управления перемещением сканером, в том числе появляется возможность удаленного управления перемещением сканером.
Существует преимущественный вариант исполнения данной системы, при которой привод перемещения ультразвукового сканера выполнен в виде многоосевого механического робота-манипулятора.
Благодаря данным выгодным характеристикам появляется возможность управлять положением ультразвукового сканера в пространстве так, чтобы он мог занимать любое положение.
Существует преимущественный вариант исполнения данной системы, при которой привод перемещения ультразвукового сканера имеет ножной блок управления.
Благодаря данным выгодным характеристикам появляется возможность ножного управления приводом перемещения ультразвукового сканера.
Существует ещё один вариант исполнения данной системы, при которой привод перемещения ультразвукового сканера имеет пульт управления.
Благодаря данным выгодным характеристикам появляется возможность управления приводом перемещения ультразвукового сканера при помощи пульта управления.
Кроме того, существует и такой возможный вариант исполнения данной системы, при которой привод перемещения ультразвукового сканера имеет блок голосового управления.
Благодаря данным выгодным характеристикам появляется возможность управления приводом перемещения ультразвукового сканера при помощи пульта голосового управления.
Наконец, существует и такой вариант исполнения данной системы, при которой привод перемещения ультразвукового сканера имеет блок точного отслеживания положения руки в режиме реального времени.
Благодаря данным выгодным характеристикам появляется возможность применения технологии с точным отслеживанием положения руки в режиме реального времени. Такие технологии известны, один из вариантов описан, например, как Utraleap (Ультралип) см сайт https://www.ultraleap.com/.
Совокупность существенных признаков предлагаемого изобретения как способа неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области.
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
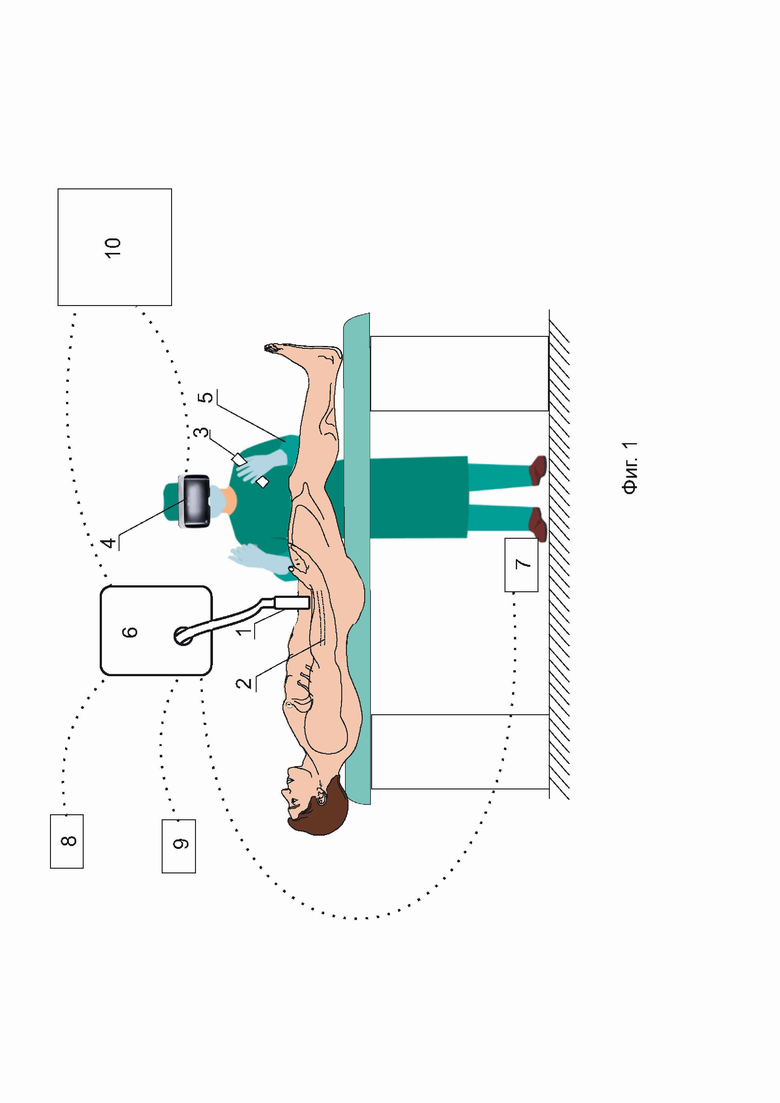
- фигура 1 изображает функциональную схему системы для чрескожной сосудистой пункции в одном варианте, согласно изобретению,
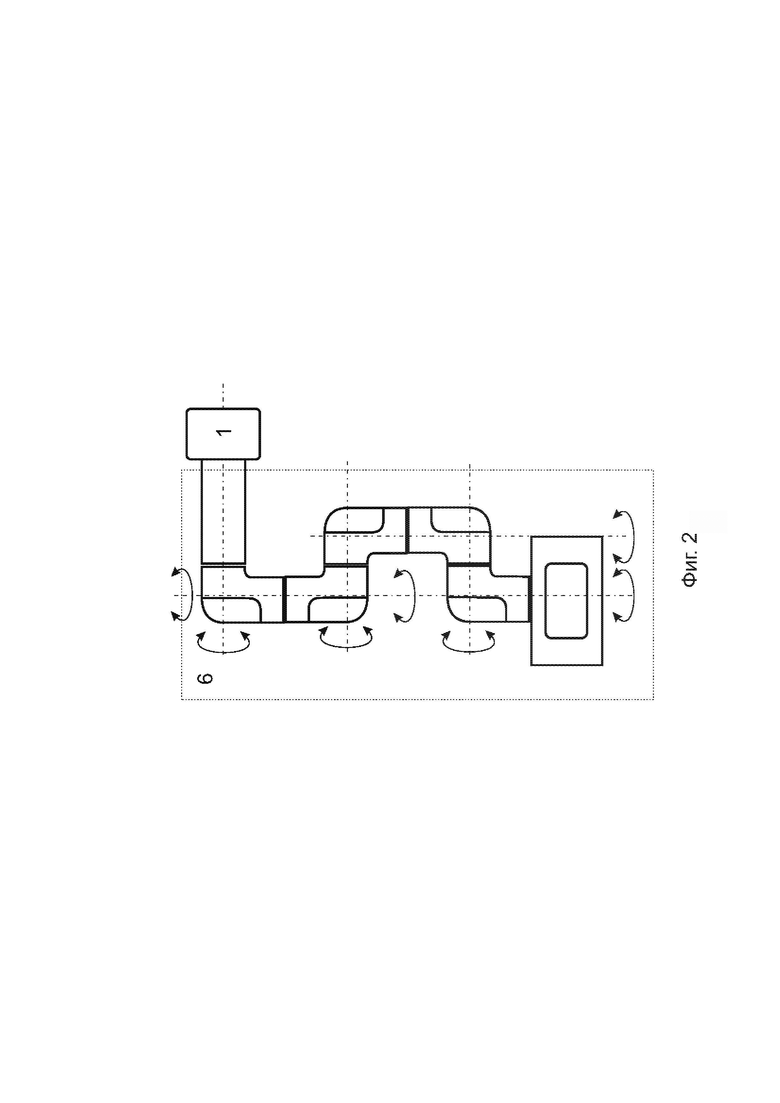
- фигура 2 изображает многоосевой механический робот-манипулятор,
- фигура 3 изображает функциональную схему системы для чрескожной сосудистой пункции в другом своем варианте, согласно изобретению,
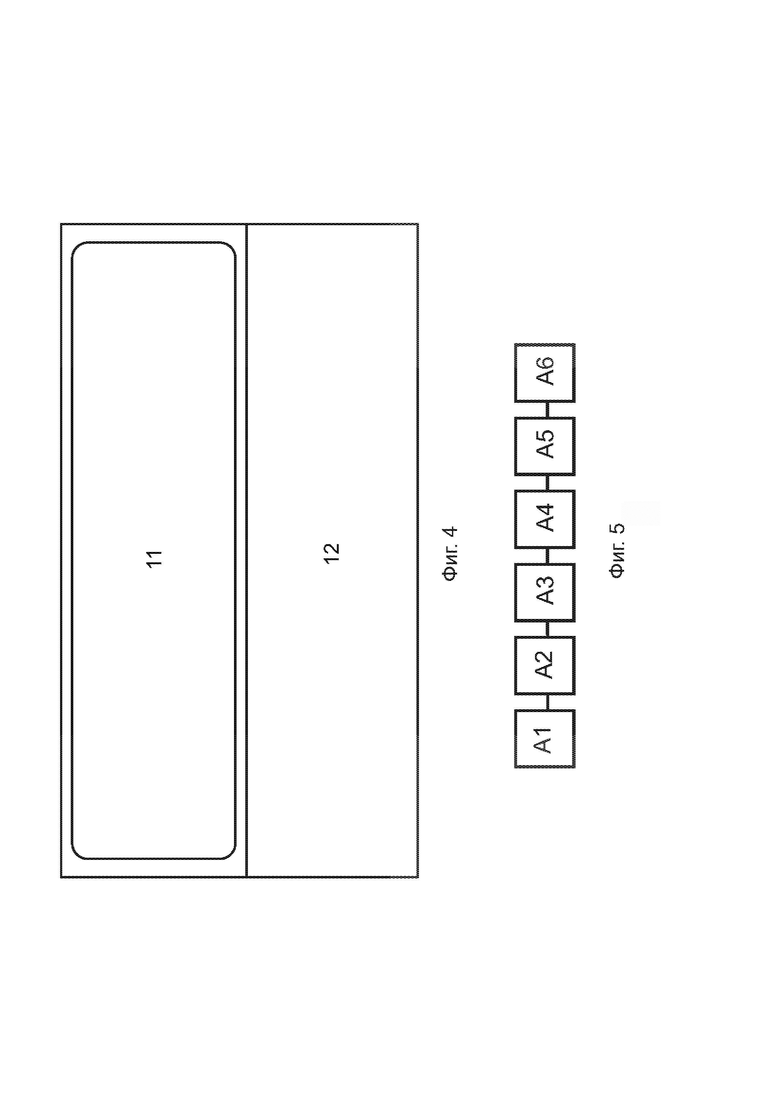
- фигура 4 изображает схематично поле зрения врача, согласно изобретению,
- фигура 5 изображает этапы чрескожной сосудистой пункции, согласно изобретению,
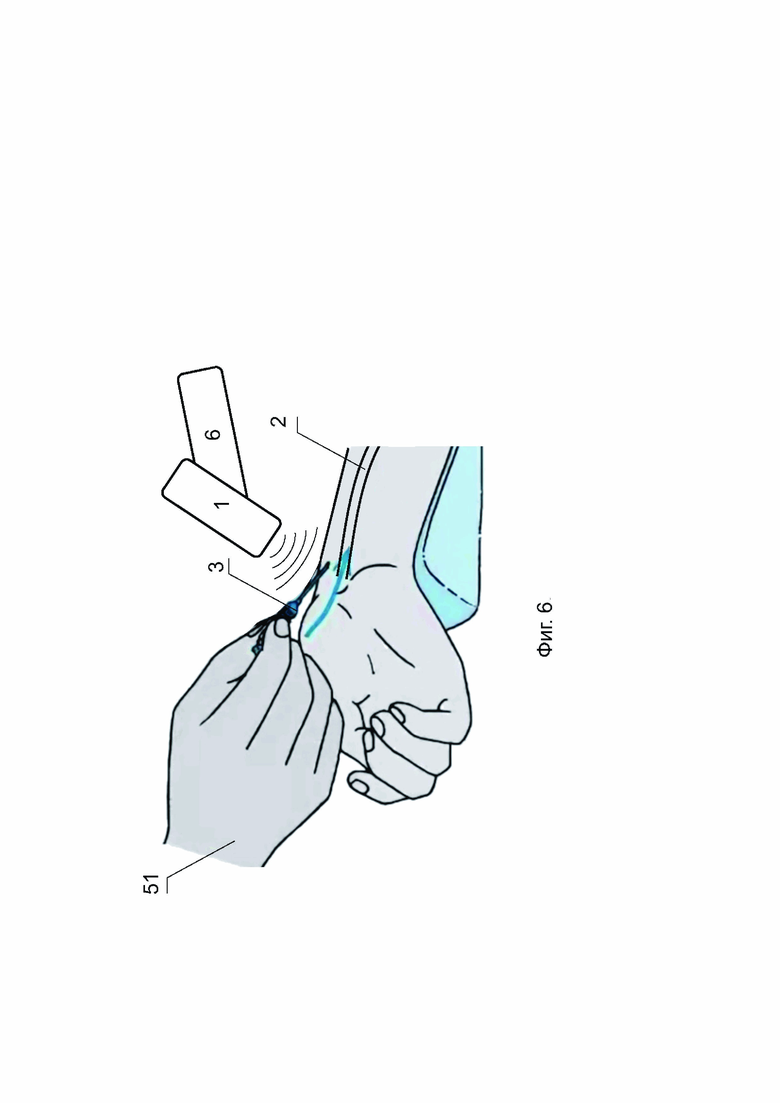
- фигура 6 показывает расположение элементов около руки пациента, согласно изобретению.
Согласно фигурам 1-3, 6 система для чрескожной сосудистой пункции включает ультразвуковой сканнер 1 для определения положения кровеносного сосуда 2 и пункционной иглы 3, очки 4 дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда 2 и пункционной иглы 3, и самой области введения пункционной иглы, а также система включает в себя привод 6 перемещения ультразвукового сканера.
Врач показан как 5, руки его как 51.
На фигуре 2 привод 6 перемещения ультразвукового сканера показан как многоосевой механический робот-манипулятор.
Привод перемещения ультразвукового сканера 6 может иметь ножной блок управления 7.
Привод перемещения ультразвукового сканера 6 может иметь пульт управления 8.
Привод перемещения ультразвукового сканера 6 может иметь блок голосового управления 9.
Информация с ультразвукового сканера 1 может передаваться сразу на очки дополненной реальности 4 или сначала на компьютерное устройство 10, где информация может обрабатываться, например, очищаться изображение от помех, а потом оно передается на очки дополненной реальности 4.
На фигурах 1,3 пунктиром показаны соединения элементов, по которым происходит передача сигналов. Это могут проводные, а также беспроводные соединения. Например, беспроводная сеть ВайФай (WiFi).
На фигуре 4 показано поле зрения врача, а именно:
11 – изображение на дисплее очков дополненной реальности 4 с ультразвукового сканера 1
12 – изображение в реальности самой области введения пункционной иглы.
Очки 4 дополненной реальности могут представлять собой также вариант, когда в специальное крепление, располагаемое на голове вставляется смартфон (многофункциональный мобильный телефон с большим графическим дисплеем), на который и передается изображение. На смартфон врача, который размещается в оправе очков дополненной реальности, также может передавать сигнал с ультразвукового сканера посредством стандартных каналов беспроводной передачи, таких как Блютус, (Bluetooth), ВайФай (WiFi), интернет, интранет и аналогичным.
Осуществление изобретения.
Способ для чрескожной сосудистой пункции осуществляют следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Согласно изобретению и фигуре 5:
Этап А1. Располагают пациента в покое, освобождают руку от одежды.
Этап А2. Используют ультразвуковой сканнер для определения положения кровеносного сосуда (артерии) и пункционной иглы.
Этап А3. Передают изображение положения кровеносного сосуда и пункционной иглы с ультразвукового сканера на очки дополненной реальности, которые располагают на голове врача, при этом используют очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения артерии и пункционной иглы, и самой области введения пункционной иглы.
Этап А4. Визуализируют артерию и ее пунктируют, для чего через пункционную иглу вводят в кровеносный сосуд направляющий проводник,
Этап А5. При этом контролируют правильное внутрисосудистое положение направляющего проводника, для чего управляют перемещением сканера. Возможно, управляют перемещением ультразвукового сканера, при котором он плавно смещается проксимально вдоль руки пациента. Преимущественно располагают ультразвуковой сканер на многоосевом механическом роботе-манипуляторе.
Этап А6. Возможно, управляют перемещением ультразвукового сканера, при котором он плавно смещается аксиально вдоль руки пациента. Управляют перемещением ультразвукового сканера и/или при помощи ножного блока управления и/или при помощи пульта управления (например, джойстика) и/или при помощи голосового управления. Также можно управлять перемещением бесконтактно, просто проводя руками в пространстве и определяя точное положение рук в режиме реального времени.
Промышленная применимость.
Предлагаемый способ для чрескожной сосудистой пункции и/или других аналогичных эндоваскулярных манипуляций, и система могут быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
За счет новых признаков, а именно того что передают изображение положения кровеносного сосуда и пункционной иглы с ультразвукового сканера на очки дополненной реальности, которые располагают на голове врача, при этом используют очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы, контролируют правильное внутрисосудистое положение направляющего проводника или эндоваскулярных инструментов для чего управляют перемещением ультразвукового сканера и достигается заявленный технический результат, а именно обеспечивается повышение точности чрескожной сосудистой пункции, снижение риска осложнений, например, повреждения задней стенки кровеносного сосуда, кровотечения и гематомы
Дополнительным важным техническим результатом является то, что повышается стерильность проведения такой чрескожной сосудистой пункции и/или других аналогичных эндоваскулярных манипуляций за счет возможности исключения прикосновения врача к предметам, которые не являются хирургическими принадлежностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ СИСТЕМА И СПОСОБ ПРОВЕДЕНИЯ ЭНДОВАСКУЛЯРНОЙ ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2020 |
|
RU2757957C1 |
| ДВУХБАЛОННАЯ СИСТЕМА ДОСТАВКИ УСЕЧЕННОГО СТЕНТА | 2008 |
|
RU2491038C2 |
| Способ лечения постпункционной пульсирующей гематомы методом временной чрескожной эмболизации проводником | 2022 |
|
RU2803524C1 |
| Способ формирования артериовенозной фистулы для профилактики нарушения проходимости магистральных артерий нижних конечностей | 2021 |
|
RU2780929C1 |
| Способ комбинированного дистального лучевого и дистального локтевого артериальных доступов для выполнения рентгенэндоваскулярных вмешательств на одной руке | 2023 |
|
RU2835725C1 |
| Универсальный тренажер для обучения допплерометрии, пункции и катетеризации сосудов под ультразвуковым контролем | 2020 |
|
RU2739667C1 |
| Способ эндоваскулярного лечения тромбоза постоянного сосудистого доступа для гемодиализа с применением ультразвуковой навигации | 2024 |
|
RU2840093C1 |
| Пункционная игла | 2017 |
|
RU2658475C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ ПЕЧЕНИ | 2007 |
|
RU2354307C1 |
| Система и устройство для закрытия пункционного отверстия сосуда | 2023 |
|
RU2824257C1 |

Данная группа изобретений относится к способам проведения чрескожной сосудистой пункции, при котором используют ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, визуализируют кровеносный сосуд и ее пунктируют, для чего через пункционную иглу вводят в кровеносный сосуд направляющий проводник, а также к соответствующим системам, реализующим способ. Согласно изобретению, передают изображение положения кровеносного сосуда и пункционной иглы с ультразвукового сканера на очки дополненной реальности, которые располагают на голове врача, при этом используют очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы. Контролируют правильное внутрисосудистое положение направляющего проводника, для чего управляют перемещением ультразвукового сканера. Система реализует указанный способ. Достигаемый технический результат – повышение точности чрескожной сосудистой пункции, снижение риска осложнений, например, повреждения задней стенки кровеносного сосуда. 2 н. и 9 з.п. ф-лы, 6 ил.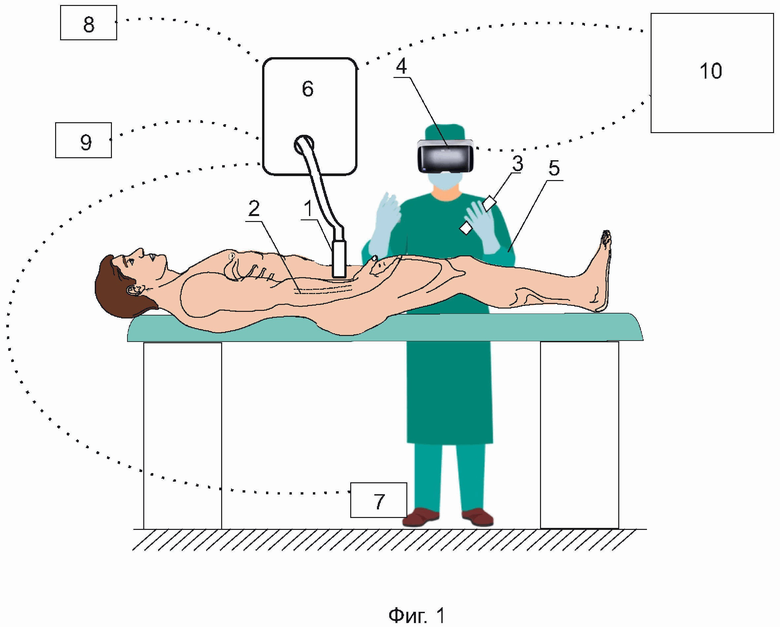
1. Cпособ для чрескожной сосудистой пункции, при котором используют ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, визуализируют кровеносный сосуд и ее пунктируют, для чего через пункционную иглу вводят в кровеносный сосуд направляющий проводник, отличающийся тем, что дополнительно
a. передают изображение положения кровеносного сосуда и пункционной иглы с ультразвукового сканера на очки дополненной реальности, которые располагают на голове врача, при этом используют очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью соединения с ультразвуковым сканером и выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы,
b. контролируют правильное внутрисосудистое положение направляющего проводника, для чего управляют перемещением ультразвукового сканера.
2. Способ по п.1, отличающийся тем, что управляют перемещением ультразвукового сканера, при котором он плавно смещается проксимально вдоль руки пациента.
3. Способ по п.1, отличающийся тем, что управляют перемещением ультразвукового сканера при помощи ножного блока управления.
4. Способ по п.1, отличающийся тем, что управляют перемещением ультразвукового сканера при помощи пульта управления.
5. Способ по п.1, отличающийся тем, что управляют перемещением ультразвукового сканера при помощи голосового управления.
6. Способ по п.1, отличающийся тем, что располагают ультразвуковой сканер на многоосевом механическом роботе-манипуляторе.
7. Система для чрескожной сосудистой пункции, включающая ультразвуковой сканнер для определения положения кровеносного сосуда и пункционной иглы, отличающаяся тем, что она включает в себя очки дополненной реальности c открытой нижней полусферой, выполненные с возможностью соединения с ультразвуковым сканером и выполненные с возможностью одновременного нахождения в поле зрения врача и изображений положения кровеносного сосуда и пункционной иглы, и самой области введения пункционной иглы, а также система включает в себя привод перемещения ультразвукового сканера.
8. Система по п. 7, отличающаяся тем, что привод перемещения ультразвукового сканера выполнен в виде многоосевого механического робота-манипулятора.
9. Система по п. 7, отличающаяся тем, что привод перемещения ультразвукового сканера имеет ножной блок управления.
10. Система по п. 7, отличающаяся тем, что привод перемещения ультразвукового сканера имеет пульт управления.
11. Система по п. 7, отличающаяся тем, что привод перемещения ультразвукового сканера имеет блок голосового управления.
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ГЛУБОКИХ ОЖОГОВ КОЖИ | 2015 |
|
RU2639449C2 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| ПРЕСС ДЛЯ ВУЛКАНИЗАЦИИ РЕЗИНОВЫХ ИЗДЕЛИЙ | 0 |
|
SU176382A1 |
| Аппарат для улавливания твердых продуктов контактных газов | 1960 |
|
SU138628A1 |
| US 20200188030 A1, 18.06.2020 | |||
| US 20200281503 A1, 10.09.2020 | |||
| EP 3779566 A1, 17.02.2021 | |||
| CN 211014857 U, 14.07.2020. | |||

