Область техники, к которой относится изобретение.
Данная группа изобретений относится к системам проведения эндоваскулярной хирургической операции, а также к соответствующим способам проведения эндоваскулярной хирургической операции с применением роботизированных средств.
В данном описании применяются следующие термины:
Эндоваскулярные инструменты - катетеры, проводники, баллонные катетеры и системы доставки стентов. Далее в формуле и описании преимущественно используется термин «катетер», но подразумевается, что имеется в виду «катетер и другие эндоваскулярные инструменты», что сделано для того, чтобы не перегружать текст и не усложнять понимание.
Привычные движения рук хирурга - индивидуальный набор мелкой моторки рук, которая формируется в результате многолетней практики хирурга при выполнении эндоваскулярных хирургических операций. Это те естественные движения, которыми хирург проводит эндоваскулярные хирургические операции в обычных (не удаленных) условиях, в операционной.
Объединенная сеть – а также все соединения между всеми модулями и блоками включают в себя различные топологии, конфигурации и компоновки компонентов межсетевого соединения, выполненные с возможностью соединять между собой корпоративные, глобальные и локальные вычислительные сети, и включает в себя, без ограничения, традиционные проводные, беспроводные, спутниковые, оптические и эквивалентные сетевые технологии.
Уровень техники системы.
В настоящее время в полостной хирургии применяются роботизированные системы daVinci (https://www.davincisurgery.com), суть которых заключается в том, что хирург сидит в отдельной капсуле и выполняет манипуляции специальными джойстиками, которые надеваются на руку, при этом хирург видит перед собой четкую видео картину операционного поля. В теле человека манипулируют различные специально разработанные сменные инструменты (зажимы, пинцеты, ножницы и т.д.), которые повторяют движение рук хирурга. Точкой приложения манипуляций хирурга в капсуле являются органы и ткани человека. Ассистенты делают доступ и меняют эти сменные инструменты.
Эндоваскулярная хирургия имеет большое отличие от большой полостной хирургии. Все действия выполняются через пластиковую трубку с гемостатическим клапаном, которую пункционным методом вставляют в артерию или вену. Таким образом, все манипуляции со специальными инструментами хирург осуществляет на поверхности тела человека. И при этом хирург использует специфические для данного вида операций привычные движения рук.
Известна система проведения эндоваскулярной хирургической операции, включающая в себя операционный стол для расположения пациента, устройство для контрастного исследования кровеносных сосудов пациента, см заявку на патент на изобретение № US2018263716, опубликована в 20.09.2018 г.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату и выбрана за прототип предлагаемого изобретения как системы.
Основным недостатком этого прототипа является ограничение работы хирурга только продвижением предустановленных ассистентами инструментов, а также то, что хирург не может проводить операцию, используя привычные движения рук, к которым он привык за время проведения обычных эндоваскулярных хирургических операций, хирург не может привычно брать инструменты и манипулировать ими. Таким образом, управление роботом с помощью джойстиков требует дополнительного обучения и не может восполнить необходимый объём движений рук хирурга.
Раскрытие изобретения как системы.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить роботизированную систему проведения эндоваскулярной хирургической операции, включающую в себя операционный стол для расположения пациента, устройство для ренгеноконтрастного исследования кровеносных сосудов пациента, позволяющую, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить возможность удаленного проведения эндоваскулярной хирургической операции при использовании привычных движений рук хирурга, что и является поставленной задачей.
Для достижения этой задачи система включает в себя также
a. антропоморфного робота, расположенного рядом с операционным столом, имеющего антропоморфный манипулятор, и выполненный с возможностью имитации движения руки хирурга, а также блок обмена данными с удаленным компьютерным устройством хирурга,
b. удаленное компьютерное устройство хирурга, имеющее дисплей и блок обмена данными с антропоморфным роботом, соединённое с
c. блоком определения положения рук хирурга в пространстве, при этом
d. антропоморфный манипулятор выполнен с возможностью захвата катетера, продольного движения катетера, и плавного вращения катетера.
Благодаря данным выгодным характеристикам появляется возможность при помощи указанных технических средств эмуляции хирургу привычной ситуации в операционной, при которой он может с помощью привычных движений выполнять эндоваскулярную хирургическую операцию, в том числе осуществлять продольное движение катетера и его вращение. Существенно то, что антропоморфный манипулятор в данном решении специально выполнен с возможностью захвата катетера, продольного движения катетера, и плавного вращения катетера, все это вместе с возможностью определения положения рук хирурга в пространстве, и возможностью передачи картины происходящего хирургу и позволяет полностью осуществить эмуляцию нахождения хирурга в операционной и максимально использовать весь его накопленный ранее опыт проведения эндоваскулярных хирургических операций.
Существует преимущественный вариант исполнения данной системы, при котором блок определения положения рук хирурга в пространстве выполнен в виде сенсорных перчаток, одеваемых на руки, и имеющие датчики положения.
Благодаря данным выгодным характеристикам появляется возможность конкретной реализации системы в той ее части, которая фиксирует положения пальцев рук хирурга. Положение каждого пальца фиксируется и может быть передано антропоморфному манипулятору.
Существует также и такой вариант исполнения данной системы, при котором система включает в себя блок продольного движения катетера, который выполнен на основе микроэлектромотора.
Благодаря данным выгодным характеристикам появляется возможность брать антропоморфным манипулятором дополнительный блок продольного движения катетера, с помощью которого становится возможным осуществлять продольное движение катетера при помощи микроэлектромотора. Например, при помощи червячного механизма преобразуя вращательные движения микроэлектромотора в поступательное.
Существует также вариант исполнения данной системы, при котором система включает в себя блок вращения катетера, который выполнен на основе микроэлектромотора.
Благодаря данным выгодным характеристикам появляется возможность брать антропоморфным манипулятором дополнительный блок вращения катетера, с помощью которого становится возможным осуществлять вращение катетера при помощи микроэлектромотора.
Кроме того, существует также и такой вариант исполнения данной системы, при котором блок плавного вращения катетера выполнен в виде параллельных пластин, выполненных с возможностью изменения расстояния между ними и параллельного движения относительно друг друга.
Благодаря данным выгодным характеристикам появляется возможность осуществлять вращение катетера при помощи параллельных пластин, выполненных с возможностью изменения расстояния между ними и параллельного движения относительно друг друга. То есть катетер плавно зажимается между двумя параллельными пластинами, и далее за счет их параллельного движения в разные стороны относительно друг друга (может двигаться одна пластина или сразу обе) осуществляется вращение катетера.
Таким образом антропоморфный манипулятор может быть сам выполнен так, чтобы осуществлять поступательное и вращательное движение катетером, а может также, в том числе дополнительно, и брать различные приспособления, (экстэнжены), которые можно использовать как для управления катетерами, например, механический можно использовать для вращения катетера, второй - электромеханический для захвата, продольного продвижения и вращения катетера, так и для другого эндоваскулярного инструмента. Антропоморфный манипулятор может и вращать их, и продольно продвигать.
Существует ещё один вариант исполнения данной системы, при котором она включает в себя педали для рентгенографической сьемки и флуороскопии, соединённые с удаленным компьютерным устройством хирурга.
Благодаря данным выгодным характеристикам появляется возможность удалённого управления хирургом изображением на своем дисплее.
Кроме того, существует такой возможный вариант исполнения данной системы, при котором она включает в себя первый джойстик для дистанционного движения операционного стола, которым может манипулировать хирург, соединённый с удаленным компьютерным устройством хирурга
Благодаря данным выгодным характеристикам появляется возможность удалённого дистанционного движения операционного стола.
Кроме того, существует такой возможный вариант исполнения данной системы, при котором она включает в себя второй джойстик для управления рентгенологической С-дуги, соединённый с удаленным компьютерным устройством хирурга.
Благодаря данным выгодным характеристикам появляется возможность удалённого дистанционного управления рентгенологической С-дугой.
Также существует и такой вариант исполнения данной системы, при котором она включает в себя дисплей вывода рентгеноскопической информации и/или дисплей вывода операционного поля, передающий изображение от видеокамеры, расположенной в операционной
Благодаря данным выгодным характеристикам появляется возможность передачи хирургу актуальной рентгеноскопической информации и/или информации из операционной, что позволяет ему привычнее проводить операцию, за счет эмулирования эффекта присутствия.
Существует такой вариант исполнения данной системы, при котором антропоморфный манипулятор выполнен в виде руки хирурга.
Благодаря данным выгодным характеристикам появляется возможность эмулировать любые движения рук хирурга, что особенно важно при нестандартных ситуациях, возникающий во время проведения эндоваскулярной хирургической операции.
Существует также и такой возможный вариант исполнения данной системы, при котором антропоморфный манипулятор включает в себя участки с магнитными свойствами
Благодаря данным выгодным характеристикам появляется возможность управления катетерами и проводниками, содержащими металл, с помощью применения магнитных средств. Например, отдельный палец антропоморфного манипулятора может включать в себя постоянный магнит, и при приближении оказывать влияние на положение катетеров и проводников, содержащих металл. Точно также антропоморфная рука может также захватывать содержащие намагничиваемые сплавы эндоваскулярные инструменты с помощью встроенных в пальцы руки постоянных магнитов.
Наконец, существует и такой вариант исполнения данной системы, при котором участки с магнитными свойствами выполнены в виде электромагнитов.
Благодаря данным выгодным характеристикам появляется возможность более разнообразного влияния на положение катетеров и проводников, содержащих металл. Удаленно можно включать и выключать электромагниты, менять силу воздействия, положение и т.д. Точно также антропоморфная рука может также захватывать содержащие намагничиваемые сплавы эндоваскулярные инструменты с помощью управляемых дистанционно электромагнитов.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для систем аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении систем. Кроме того, данное решение неочевидно для специалиста в данной области.
Уровень техники способа.
Из уровня техники известен способ проведения эндоваскулярной хирургической операции, включающий в себя этапы, при которых:
• располагают пациента на операционном столе,
• вводят в кровеносные сосуды интродьюссер через катетер,
• контролируют положение интродьюссера с помощью методов рентгеноконтрастного исследования кровеносных сосудов положение диагностических проводников, катетеров, баллонных катетеров и стентов,
см заявку на патент на изобретение № US2018263716, опубликована в 20.09.2018 г.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Основным недостатком этого прототипа также является ограничение работы хирурга только продвижением предустановленных ассистентами инструментов, а также то, что хирург не может проводить операцию, используя привычные движения рук, к которым он привык за время проведения обычных эндоваскулярных хирургических операций, хирург не может привычно брать инструменты и манипулировать ими. Таким образом, управление роботом с помощью джойстиков требует дополнительного обучения и не может восполнить необходимый объём движений рук хирурга.
Кроме того, невозможно производить манипулирование катетерами в нестандартных случаях.
Раскрытие изобретения как способа.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ проведения эндоваскулярной хирургической операции, включающий в себя этапы, при которых: располагают пациента на операционном столе, вводят в кровеносные сосуды интродьюссер через катетер, контролируют с помощью методов контрастного исследования кровеносных сосудов положение интродьюссера и других типовых эндоваскулярный инструментов, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить возможность удаленного проведения эндоваскулярной хирургической операции при использовании привычных движений рук хирурга, что и является поставленной задачей.
Для достижения этой цели роботизированный способ проведения эндоваскулярной хирургической операции характеризуется по существу тем, что способ включает в себя следующие этапы:
• управляют катетером с помощью антропоморфного манипулятора антропоморфного робота, который соединяют посредством объединённой сети с удаленным компьютерным устройством хирурга,
• антропоморфным манипулятором управляют при помощи блока определения положения рук хирурга в пространстве, соединённым с удаленным компьютерным устройством хирурга,
• контролируют процесс через дисплеи, на которые выводят данные контрастного исследования кровеносных сосудов и обзор операционного поля
• выполняют антропоморфный манипулятор с возможностью антропоморфного захвата катетера, его продольного движения и возможностью его плавного вращения.
Благодаря данным выгодным характеристикам появляется возможность хирургу при помощи указанных технических средств эмуляции привычной ситуации в операционной, выполнить с помощью привычных движений эндоваскулярную хирургическую операцию, в том числе осуществлять продольное движение катетера и его вращение. При этом, захват катетера, продольное движения катетера, и плавное вращение катетера может осуществляться с помощью пальцев антропоморфной руки или с помощью специальных устройств, которые антропоморфная рука может присоединять к себе и захватывать различные катетеры и проводники.
Существует преимущественный вариант исполнения данного способа, при котором используют для определения положения рук хирурга в пространстве сенсорные перчатки, одеваемые на руки, и имеющие датчики положения.
Благодаря данным выгодным характеристикам появляется возможность конкретной реализации системы в той ее части, которая фиксирует положения пальцев рук хирурга. Положение каждого пальца фиксируется и может быть передано антропоморфному манипулятору-аватару.
Существует ещё один вариант исполнения данного способа, при котором используют педали для ангиографической съемки и флуороскопии, соединённые с удаленным компьютерным устройством хирурга.
Благодаря данным выгодным характеристикам появляется возможность удалённого управления хирургом изображением на своем дисплее.
Кроме того, существует и такой возможный вариант исполнения данного способа, при котором используют для дистанционного движения операционного стола первый джойстик, соединённый с удаленным компьютерным устройством хирурга.
Благодаря данным выгодным характеристикам появляется возможность удалённого управления движением операционного стола.
Существует и такой возможный вариант исполнения данного способа, при котором используют для управления рентгенологической С-дуги второй джойстик, соединённый с удаленным компьютерным устройством хирурга.
Благодаря данным выгодным характеристикам появляется возможность удалённого управления рентгенологической С-дугой.
Также существует и такой вариант исполнения данного способа, при котором передают удалённому хирургу видеоизображения операционного поля с операционной и/или рентгеноскопическую информацию
Благодаря данным выгодным характеристикам появляется возможность передачи актуальной рентгеноскопической информации и/или информации хирургу из операционной, что позволяет ему привычнее проводить операцию, за счет эмулирования эффекта присутствия.
Существует ещё один вариант исполнения данного способа, при котором выполняют антропоморфный манипулятор в виде руки хирурга.
Благодаря данным выгодным характеристикам появляется возможность эмулировать любые движения рук хирурга, что особенно важно при нестандартных ситуациях, возникающий во время проведения эндоваскулярной хирургической операции.
Кроме того, существует и такой возможный вариант исполнения данного способа, при котором используют для управления катетеров и проводников, содержащих металл, расположенные на антропоморфном манипуляторе участки с магнитными свойствами.
Благодаря данным выгодным характеристикам появляется возможность управления катетерами и проводниками, содержащими металл, с помощью применения магнитных средств. Например, отдельный палец антропоморфного манипулятора может включать в себя постоянный магнит, и при приближении оказывать влияние на положение катетеров и проводников, содержащих металл. Точно также антропоморфная рука может также захватывать содержащие намагничиваемые сплавы эндоваскулярные инструменты с помощью встроенных в пальцы руки постоянных магнитов.
Наконец, существует и такой вариант исполнения данного способа, при котором используют в качестве участков с магнитными свойствами электромагниты, которыми управляют удаленно.
Благодаря данным выгодным характеристикам появляется возможность более разнообразного влияния на положение катетеров и проводников, содержащих металл. Удаленно можно включать и выключать электромагниты, менять силу воздействия, положение и т.д. Точно также антропоморфная рука может также захватывать содержащие намагничиваемые сплавы эндоваскулярные инструменты с помощью управляемых дистанционно электромагнитов.
Совокупность существенных признаков предлагаемого изобретения как способа неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области.
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
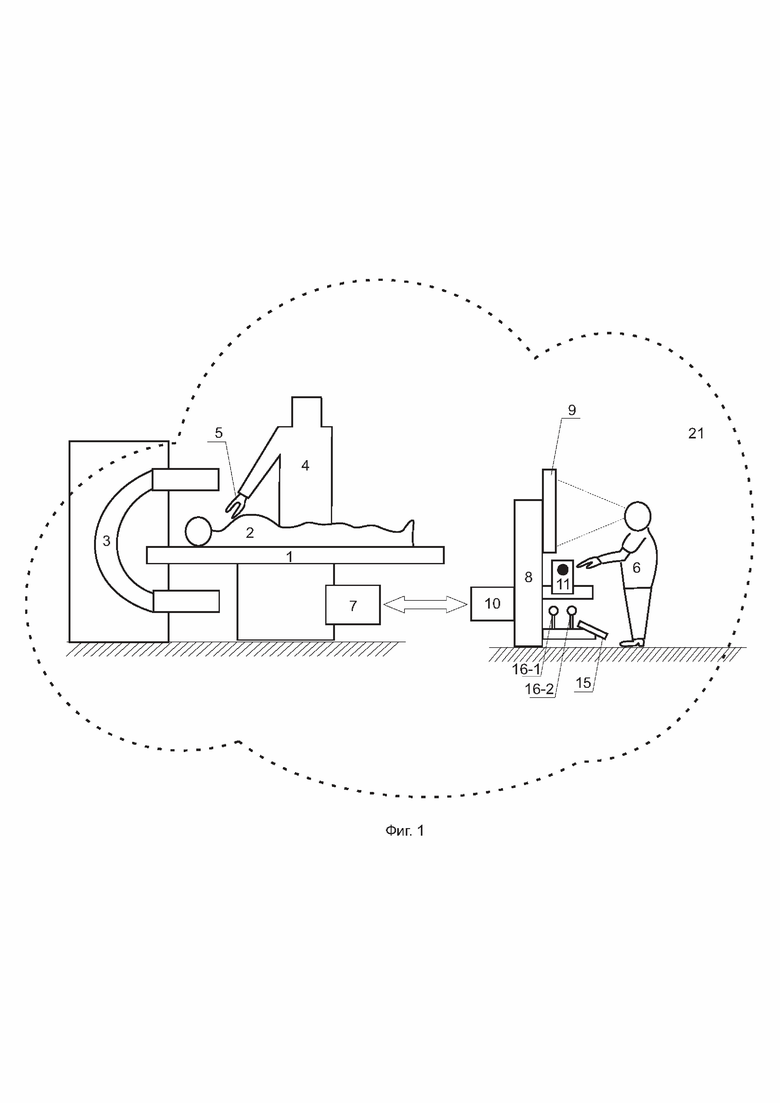
- фигура 1 изображает функциональную схему системы проведения эндоваскулярной хирургической операции, согласно изобретению,
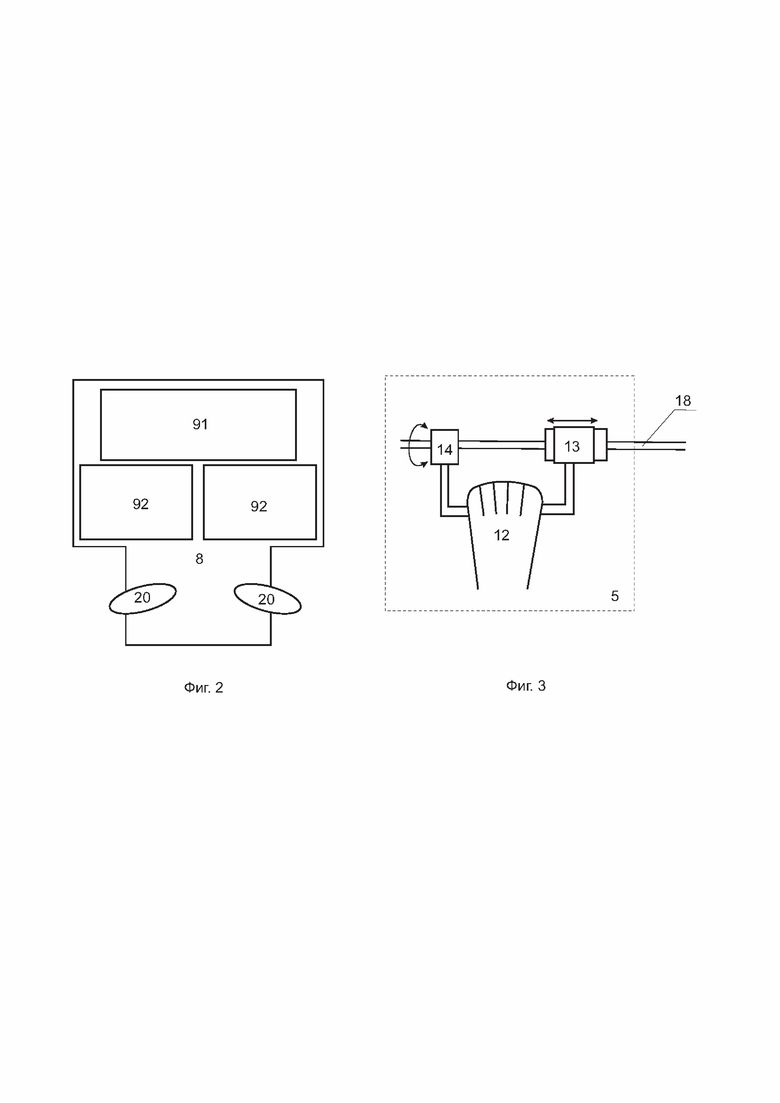
- фигура 2 изображает возможное расположение дисплеев и сенсорных перчаток на рабочем месте хирурга, согласно изобретению,
- фигура 3 изображает возможный вариант реализации захвата, вращения и продольного движения катетера, согласно изобретению,
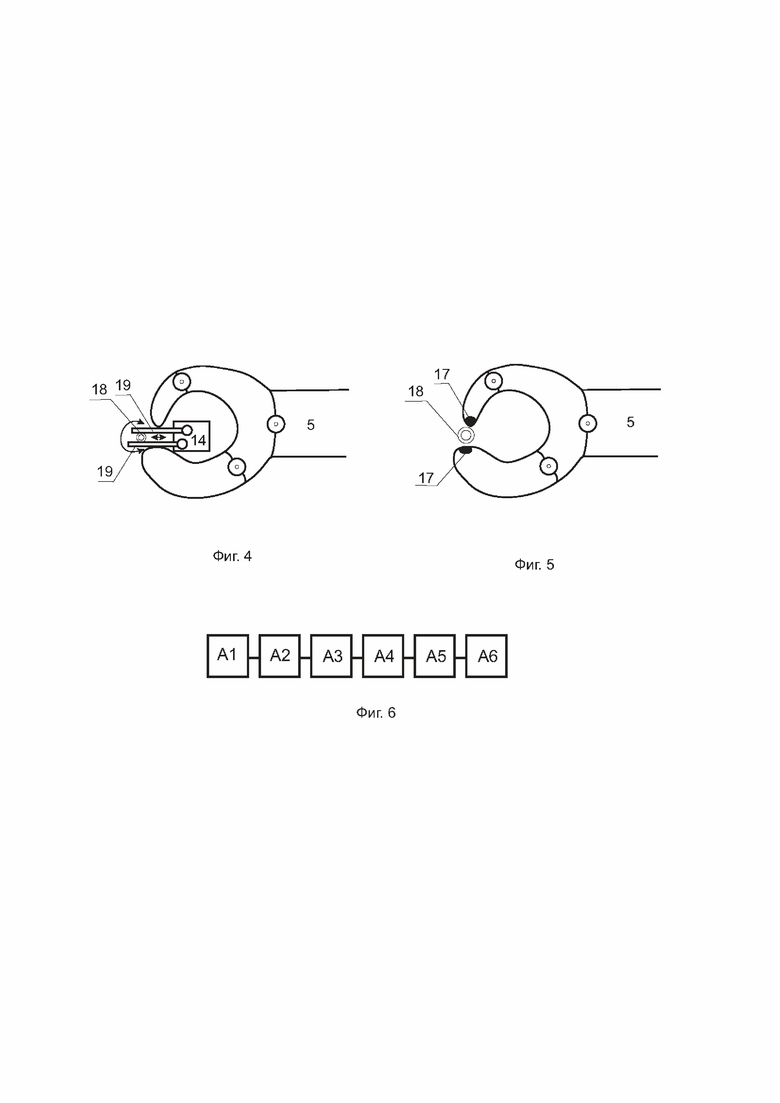
- фигура 4 изображает другой возможный вариант реализации захвата, вращения и продольного движения катетера, согласно изобретению,
- фигура 5 изображает использование магнитов в антропоморфном манипуляторе, согласно изобретению,
- фигура 6 схематически изображает этапы способа, согласно изобретению.
Согласно фигурам 1-5 роботизированная система проведения эндоваскулярной хирургической операции включает в себя операционный стол 1 для расположения пациента 2, устройство для контрастного исследования кровеносных сосудов пациента (показана в виде рентгенологической С-дуги 3), а также антропоморфного робота 4, расположенного рядом с операционным столом 1, имеющего антропоморфный манипулятор 5, выполненный с возможностью имитации движения руки хирурга 6, а также блок обмена данными 7 с удаленным компьютерным устройством хирурга 8. Удаленное компьютерное устройство 8 хирурга, имеет дисплей 9 и блок 10 обмена данными с антропоморфным роботом 4, соединённое с блоком 11 определения положения рук хирурга 6 в пространстве. Антропоморфный манипулятор 5 включает в себя блок 12 захвата катетера, блок 13 продольного движения катетера, и блок плавного вращения катетера 14.
Роботизированная система в своей основе может включать ангиографический комплекс для проведения эндоваскулярных операций, который состоит из специального рентгеноконтрастного смещаемого в горизонтальной плоскости операционного стола и рентгенологической С-дуги 3.
Блок 11 определения положения рук хирурга в пространстве может быть выполнен в виде сенсорных перчаток 20, одеваемых на руки, и имеющие датчики положения.
Роботизированная система может включать в себя педали 15 для ангиографической съемки и флуороскопии, соединённые с удаленным компьютерным устройством 8 хирурга.
Роботизированная система может включать в себя первый джойстик 16-1 для дистанционного движения операционного стола 1, которым может манипулировать хирург, соединённый с удаленным компьютерным устройством 8 хирурга. А также Роботизированная система может включать в себя также второй джойстик 16-2 для управления рентгенологической С-дугой 3, соединённый с удаленным компьютерным устройством 3 хирурга.
Роботизированная система может включать в себя дисплей 91 вывода рентгеноскопической информации и дисплей (или дисплеи) 92 вывода операционного поля, передающие изображение от видеокамеры, расположенной в операционной.
Антропоморфный манипулятор может быть выполнен в виде руки хирурга.
Антропоморфный манипулятор может включать в себя участки с магнитными свойствами, например, постоянные магниты или электромагниты. Показаны как 17.
На фигуре 4 показан вариант исполнения антропоморфного манипулятора в варианте, когда блок плавного вращения катетера 14 осуществляет вращение катетером 18 через прижим и параллельное движение прижимных пластин 19.
Сенсорные перчатки показаны на фигуре 2 как 20.
Объединенная сеть передачи данных показана на фигуре 1 как 21.
Осуществление изобретения.
Способ проведения эндоваскулярной хирургической операции осуществляют следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Обычную операцию выполняют в типовой рентгеноперационной, которая содержит:
• специальный не контрастный для рентгена операционный стол, движение которым выполняется оперирующим хирургом с помощью специальной рукоятки в разные направления горизонтальной плоскости, джойстик 16-1;
• С-дугу, которая содержит анод и детектор и вращается вокруг стола, создавая возможность многопроекционного исследования, показана как 3;
• консоль с дисплеями 91 и 92, которые воспроизводят рентгеноскопическое изображение и отдельно параметры гемодинамики пациента, они располагаются на уровне глаз хирурга.
• Хирург управляет процессом съемки с помощью двойной педали 15, одна клавиша обеспечивает непрерывный флюороскопический режим, а вторая - непосредственно режим съемки, при этом происходит автоматическая запись съемки.
• Отдельно, рядом со столом может быть размещен типовой автомат для введения контрастного вещества, который специальными линиями подключается к ангиографическому катетеру.
Пациента 2 укладывают на операционный стол 1, ассистенты (не показаны) выполняют пункцию бедренной или радиальной артерии и устанавливают в нее специальную пластиковую трубку с гемостатическим клапаном - интродьюссер, фиксируют его к коже. Далее через этот интродьюссер хирург заводит в артериальное русло различные катетеры 18 по направляющим проводникам и при этом мониторирует движение рентгеноконтрастных инструментов внутри пациента, нажимая на педаль 15 (режим флюороскопии) и перемещая левой рукой стол с пациентом так чтобы инструменты были всегда в поле зрения, которое обеспечивается анодом и детектором С-дуги.
Согласно изобретению:
Этап А1. Пациента 2 укладывают на стол, ассистенты выполняют пункцию бедренной или радиальной артерии и устанавливают в нее специальную пластиковую трубку с гемостатическим клапаном - интродьюссер, фиксируют его к коже. Далее ассистент вставляет в интродьюссер катетер с диагностическим проводником, при этом часть катетера, которая не заведена, укладывается на специальную пластиковую подложку, чтобы руке робота - антропоморфному манипулятору 5 можно было удобно взять катетер 18.
Этап А2. С этого момента в работу вступает робот 4. Хирург сидит удаленно. Перед ним расположены рентгеноскопические мониторы (это типовая комплектация рентгеноперационной). На хирурге могут быть одеты очки VR, которые не закрывают полностью поле зрения и на экране этих очков хирург видит перед собой операционное поле так, как будто он стоял бы перед операционным столом. Или могут быть использованы дисплеи передачи видеоданных 91 и 92.
Этап А3. Под ногами у хирурга расположены две типовые педали 15 для двух указанных выше рентгеноскопических режимов;
Этап А4. Рядом с хирургом расположены джойстики управления операционным столом и С - дугой 16-1 и 16-2, воздействуя на которые хирург может управлять движением ангиографического стола с пациентом;
Этап А5. Для введения контрастного вещества во время съемки, хирург дает команду своим ассистентам через микрофон, на фигурах не показан;
Этап А6. Хирург надевает специальные сенсорные (аватарные) перчатки 20, которые закреплены таким образом, что хирург может прилагать одинаковые усилия для движения во всех направлениях имея поддержку своих рук; при этом движения предплечий и кисти хирурга точно дистанционно передаются антропоморфным рукам робота и при этом в очках VR или на дисплеях 91 и 92 хирург видит операционное поле, катетеры 18 и повторяющие его движения антропоморфные руки робота 5. Хирург берет катетер 18 и начинает манипулировать им в продольной горизонтальной плоскости с помощью простого захвата двумя пальцами робота. Для вращения катетера и его продольного продвижения, хирург берет рукой робота специальный экстэнжн, захватывает им катетер и выполняет вращательные движения. (Блок плавного вращения катетера 14).
Возможен такой вариант антропоморфного манипулятора - механизации бионической антропоморфной руки, при которой два пальца (или более) робота могут повторять движения пальцев живой руки для вращения катетера.
Или же для вращения катетера используется перемещение в противоположном направлении двух плоских поверхностей между которыми зажат катетер, которое им имитирует вращательные движения пальцев хирурга. См. фигуру 4.
Также могут быть использованы магнитные свойства отдельных участков антропоморфного манипулятора для управления магнитовоспримчивыми катетерами и проводниками, содержащими металл. См. фигуру 5.
Промышленная применимость.
Предлагаемый способ проведения эндоваскулярной хирургической операции и роботизированная система могут быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения. Кроме того, предлагаемый способ исключает манипуляции руками антропоморфного робота внутри тела человека, и позволяет хирургу находиться удаленно и позволяет не подвергаться облучению в рентгеноперационной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ЧРЕСКОЖНОЙ СОСУДИСТОЙ ПУНКЦИИ | 2021 |
|
RU2766396C1 |
| Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе (варианты) | 2023 |
|
RU2831301C1 |
| ДВУХБАЛОННАЯ СИСТЕМА ДОСТАВКИ УСЕЧЕННОГО СТЕНТА | 2008 |
|
RU2491038C2 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Интервенционная хирургическая роботизированная система, способ управления и носитель данных | 2022 |
|
RU2806087C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| СПОСОБ ПРОВЕДЕНИЯ МАЛОИНВАЗИВНОГО ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА И УСТАНОВКА "РХ-1" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594100C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
Изобретение относится к медицине, а именно к способам проведения эндоваскулярной хирургической операции с применением роботизированных средств. Способ включает в себя этапы, при которых: располагают пациента на операционном столе; вводят в кровеносные сосуды интродьюссер с гемостатическим клапаном; контролируют положение интродьюссера с помощью методов рентгеноконтрастного исследования кровеносных сосудов положение диагностических проводников, катетеров, баллонных катетеров и стентов. При этом также управляют катетерами и проводниками с помощью антропоморфного манипулятора антропоморфного робота, который соединяют посредством объединённой сети с удаленным компьютерным устройством хирурга и который повторяет движения рук хирурга. Антропоморфным манипулятором управляют при помощи блока определения положения рук хирурга в пространстве, соединенного с удаленным компьютерным устройством хирурга. Контролируют процесс через дисплей, на который выводят данные методов контрастного исследования кровеносных сосудов. Выполняют антропоморфный манипулятор с возможностью антропоморфного захвата катетера, его продольного движения и возможностью его плавного вращения. Достигается возможность проведения эндоваскулярной хирургической операции при использовании привычных движений рук хирурга. 8 з.п. ф-лы., 6 ил.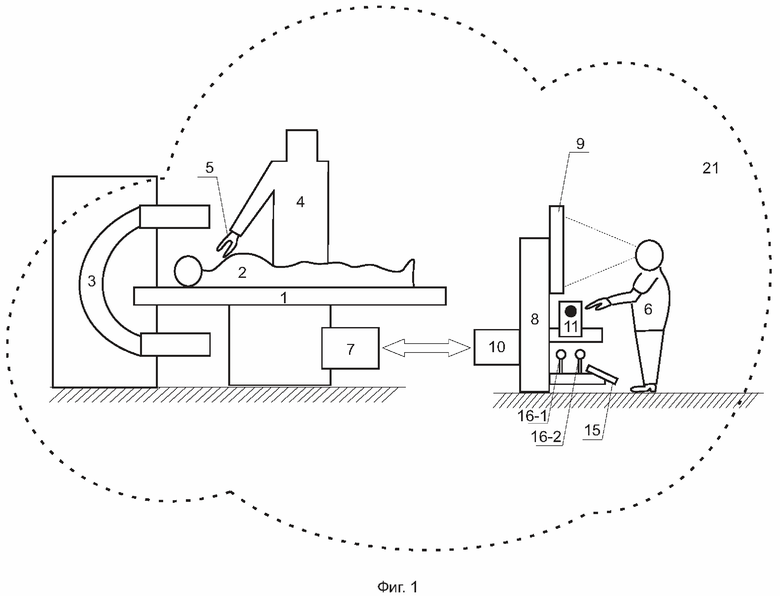
1. Способ проведения эндоваскулярной хирургической операции с применением роботизированных средств, включающий в себя этапы, при которых:
a. располагают пациента на операционном столе,
b. вводят в кровеносные сосуды интродьюссер с гемостатическим клапаном,
c. контролируют положение интродьюссера с помощью методов рентгеноконтрастного исследования кровеносных сосудов положение диагностических проводников, катетеров, баллонных катетеров и стентов,
отличающийся тем, что
d. управляют катетерами и проводниками с помощью антропоморфного манипулятора антропоморфного робота, который соединяют посредством объединённой сети с удаленным компьютерным устройством хирурга и который повторяет движения рук хирурга,
e. антропоморфным манипулятором управляют при помощи блока определения положения рук хирурга в пространстве, соединённого с удаленным компьютерным устройством хирурга,
f. контролируют процесс через дисплей, на который выводят данные методов контрастного исследования кровеносных сосудов,
g. выполняют антропоморфный манипулятор с возможностью антропоморфного захвата катетера, его продольного движения и возможностью его плавного вращения.
2. Способ по п.1, отличающийся тем, что используют для определения положения рук хирурга в пространстве сенсорные перчатки, одеваемые на руки, и имеющие датчики положения.
3. Способ по п.1, отличающийся тем, что используют педали для ангиографической съемки и флуороскопии, соединённые с удаленным компьютерным устройством хирурга.
4. Способ по п.1, отличающийся тем, что используют для дистанционного движения операционного стола первый джойстик, соединённый с удаленным компьютерным устройством хирурга.
5. Способ по п.1, отличающийся тем, что используют для управления рентгенологической С-дуги второй джойстик, соединённый с удаленным компьютерным устройством хирурга.
6. Способ по п.1, отличающийся тем, что передают удалённому хирургу видеоизображения операционного поля на операционном столе и рентеноскопическую информацию.
7. Способ по п.1, отличающийся тем, что выполняют антропоморфный манипулятор в виде руки хирурга.
8. Способ по п.1, отличающийся тем, что используют для управления катетеров и проводников, содержащих металл, расположенные на антропоморфном манипуляторе участки с магнитными свойствами.
9. Способ по п.1, отличающийся тем, что используют в качестве участков с магнитными свойствами электромагниты, которыми управляют удаленно.
| US 2017135662 A1, 18.05.2017 | |||
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| US 20190216562 A1, 18.07.2019 | |||
| US 20200254218 A1, 13.08.2020 | |||
| US 2014371578 A1, 18.12.2014 | |||
| US 20180243151 A1, 30.08.2018. | |||

