Из заявки на патент US 2009/01898044 А1, 14.03.2019, (абзацы [0026]-[0035]; фиг. 1-2; формула; реферат) известно устройство автоматизации позиционирования для нескольких антенн (или одной антенны), установленных на подвижном объекте. Наведение антенн происходит посредством работы процессора, который анализирует взаимное расположения наводимых антенн, и запускает в движение объекта (площадки) в пространстве, на котором находятся антенны, из расчета, чтобы принимаемая мощность сигнала антеннами со спутника была максимальна. Недостатком данного устройства является то, что для тяжелых антенн (весом от нескольких тонн), заявленное техническое решение будет громоздким и дорогостоящим.
Задачей настоящего изобретения является устранение вышеуказанных недостатков.
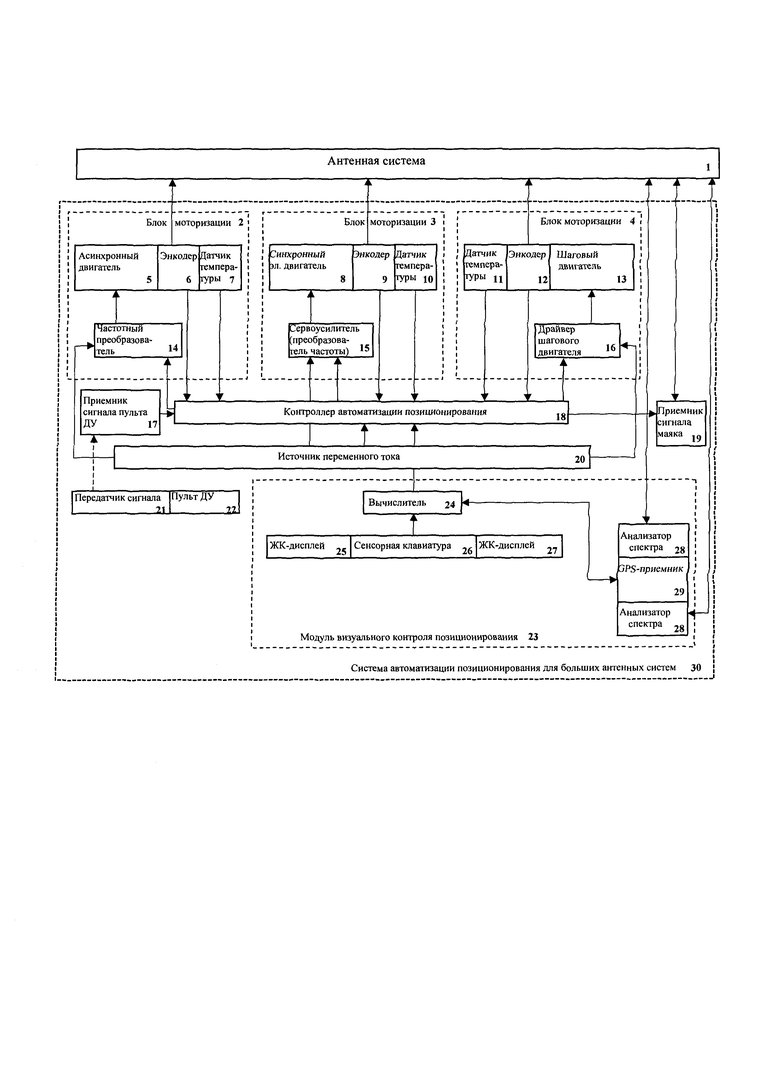
Задача решается при помощи системы автоматизации позиционирования (30) для больших антенных систем (1), содержащий источник переменного тока (20), контроллер автоматизации позиционирования (18), и подключенные к нему приемник сигнала маяка (19) и по меньшей мере один блок моторизации (2, 3, 4), включающий в себя электродвигатель (5, 8, 13), электронное устройство для управления электродвигателем (14, 15, 16), энкодер (6, 9, 12) и датчик температуры (7, 10, 11). Электронное устройство для управления электродвигателем (14, 15, 16) может отличаться, в зависимости от типа электродвигателя антенной системы (1), к которому подключается блок моторизации (2, 3, 4). Система автоматизации (30) содержит контроллер автоматизации позиционирования (18), выполненный с возможностью обеспечения наведения станции спутниковой связи на спутник-ретранслятор и сопровождения спутника-ретранслятора с использованием аналоговых и/или цифровых приемников сигнала маяка, Также система автоматизации (30) содержит в себе модуль визуального контроля позиционирования (23), подключенный через оптоволоконную линию к контроллеру автоматизации позиционирования (18), состоящий из двух жидкокристаллических дисплеев (27, 25), сенсорной клавиатуры (26), двух анализаторов спектров (28), вычислителя (24) и GPS-приемника (29), причем каждый из двух анализаторов спектров (28) присоединен к антенной системе (1), а GPS-приемник (29) обеспечивает синхронную работу модуля визуализации (23) и контроллера автоматизации позиционирования (18).
Техническим результатом является универсальность заявленной системы, повышение быстродействия, увеличение долговечности работы электродвигателей, снижение ошибки позиционирования, упрощение системы и расширение функциональных возможностей при наведении станции спутниковой связи на спутник-ретранслятор и сопровождении спутника-ретранслятора при использовании станции спутниковой связи с системой моторизации.
Система автоматизации позиционирования для больших антенных систем (30), с помощью внешних соединений подключается к станции спутниковой связи (1) (большой антенной системе) блоками-моторизациями (2, 3, 4). В состав блоков (2, 3, 4) входят датчики угла поворота (энкодер (6, 9, 12)), которые включены в состав заявленной системы для определения положения вращающихся валов электродвигателей. Энкодеры (6, 9, 12) генерируют цифровой код, который является уникальным для каждого положения вала, и передает данную информацию для обработки в контроллер автоматизации позиционирования (18). Система обрабатывает информацию в контроллере автоматизации позиционирования (18) с датчика угла поворота (энкодера (6, 9, 12)), который входит в состав каждого из блоков моторизации (2, 3, 4), подключенных к станции спутниковой связи (1), и предназначен для информационной связи по положению между блоком моторизации (2, 3, 4) и контроллером (18) (в цифровом формате), за счет данной информации происходит процесс управления системой моторизации антенны станции спутниковой связи для наведения ее на спутник-ретранслятор и его сопровождения.
Система предназначена для работы в составе системы наведения антенны земной станции спутниковой связи и решения функциональных задач контроля и управления наведением антенной системы в заданном пространственном направлении.
Блок моторизации (2, 3, 4) отвечает за движение антенной системы (1) при ее оснащении приводами: азимутальным, угломестным, поляризации или азимутальным, угломестным, оси наклона и поляризации с двигателями (синхронными (8) и/или асинхронными (5) - для угломестной, азимутальной и оси наклона, шаговым (13) - для оси поляризации), датчиками угла поворота антенны (энкодер (6, 9, 12)) (по азимуту, углу места, наклону, поляризации) и концевыми выключателями (по азимуту, углу места, наклону, поляризации), а также на каждом приводе размещается контактный датчик температуры (7, 10, 11). Заявленная система способна работать по меньшей мере с одним блоком моторизации (2, 3, 4), которые отвечают за движение в одной оси (азимутальной, угломестной, поляризации, наклона) движения антенной системы (1) и входят в состав системы автоматизации позиционирования (30) для больших антенных систем.
Блоки моторизации (2, 3, 4), входящие в состав системы, могут включать любые типы электродвигателей, которые используются в составе поворотных устройствах современных антенных систем: асинхронные (5), синхронные (8) и шаговые (13) двигателями, это достигается за счет того, что в состав блока моторизации входят частотные преобразователи (14), сервоусилители (15) (преобразователи частот), драйверы шаговых двигателей (16) соответственно. Кроме того, для каждой оси может быть предусмотрено более одного блока моторизации (2, 3, 4) в зависимости от конструктива антенной системы (1): в некоторых больших антенных системах одного блока моторизации может быть недостаточно, чтобы обеспечить необходимую скорость движения антенной системы в определенной оси, в таком случае в антенную систему можно включить не менее одного блока моторизации, которые будут отвечать только за движение по одной оси. На каждом электродвигателе размещается контактный датчик температуры (7, 10, 11), который передает информацию о температуре электродвигателя в контроллер автоматизации позиционирования. Как известно, электродвигатели очень требовательны к температурным изменениям [Штремель Г.Х. Эксплуатация и ремонт электромеханического оборудования. И.: Москва, 1964 г. ]. При низких температурах окружающей среды для корректной работы электродвигателю необходимо прогреться до положительной температуры, при высоких температурах окружающей среды и работе на максимальную мощность, ресурс электродвигателей уменьшается на порядок. Для обеспечения долговечной работы в составе антенной системе и без неожиданного выхода из строя одного или нескольких блоков моторизации, данные с датчиком температуры анализируется контроллером автоматизации позиционирования: если порог внутренней температуры на блоке моторизации низкий, то система автоматизации позиционирования для больших антенных систем прогревает его до тех пор, пока блок моторизации не выйдет на рабочую температуру и после этого начинается управление антенной системой, в случае снятия высокой температуры датчиком температуры с блока моторизации - система задействует их на неполную мощность, для предотвращения перегревания и выхода их из строя. Контроль температуры на блоке моторизации антенной системы позволяет использовать антенну земной станции спутниковой связи в любом климатическом районе.
Для повышения точности позиционирования система (30) снабжена приемником сигнала маяка (19), предназначенным для установки антенны станции спутниковой связи в положение при наилучшем соотношении сигнала к шуму. Приемник сигнала маяка (19) подключается с помощью внешних соединений (высокочастотного кабеля) с приемо-передающим трактом антенной системы к контроллеру автоматизации позиционирования (18). Система также обладает универсальностью по использованию приемников наведения: работает как с аналоговыми приемниками наведения, так и с цифровыми приемниками наведения, а также с моноимпульсными приемниками, с которыми обеспечивается непосредственное формирование величины и направления отклонения оси антенны от оси направления на космическом аппарате.
Система может быть выполнена в едином телекоммуникационном шкафу уличного исполнения с одной дверью и в климатическом исполнении умеренного и холодного макроклиматических районов, и предназначено для эксплуатации на открытом воздухе при воздействии экстремальных атмосферных факторов. Телекоммуникационный шкаф может включать в себя в себя приемник сигнала маяка (19), контроллер автоматизации позиционирования (18), приемник сигнала пульта дистанционного управления (17) (ДУ), а также разъемы для подключения по меньшей мере одного блока моторизации (2, 3, 4) антенной системы большой апертуры.
Пульт дистанционного управления (22) может быть выполнен в проводном или в беспроводном, пыле- и влагозащищенном исполнении. Пульт содержит в себе клавиатуру, процессор и передатчик сигнала (21), для взаимодействия с контроллером автоматизации позиционирования (18). В качестве внутреннего питания может быть использована батарея, или аккумуляторная батарея, которую можно заряжать - при наличии разъема для внешнего питания. Также пульт дистанционного управления - при наличии разъема - может работать от внешнего питания. Разъемом для внешнего питания может быть, в частности, USB - разъем. Пульт позволяет навести антенную систему (1), оборудованную устройством автоматизации позиционирования для больших антенных систем, в непосредственной близости и убедиться, что система автоматизации позиционирования (30) для больших антенных систем корректно управляет приводами антенной системы.
В состав системы входит модуль визуального контроля позиционирования (23), находящийся в одном телекоммуникационном шкафу вместе с системой (30), подключаемый в системе к контроллеру автоматизации позиционирования (18) по оптоволоконной линии. Модуль визуального контроля (23) состоит из двух жидкокристаллических дисплеев (25, 27), сенсорной клавиатуры (26), двух анализаторов спектров (28), вычислителя (24) и GPS-приемника (29) и питается от источника переменного тока (20) (например, от сети 220 Вольт). На одном из дисплеев (25, 27) отображается визуальная информация о текущем процессе позиционирования, на втором дисплее (25, 27) отображаются данные с анализаторов спектров (28), GPS-приемника (29), которые позволяют в реальном времени контролировать уровень принимаемого сигнала со спутника-ретранслятора антенной системой. Использование двух анализаторов спектра (28) позволяет контролировать в реальном времени две поляризации спутникового сигнала: линейную и круговую, за счет которых происходит высокоточное наведение антенной системы (1) на спутник-ретранслятор. С помощью сенсорной клавиатуры (26) можно управлять позиционированием антенной системой (1), а также контролировать в режиме реального времени процесс позиционирования.
Система может работать, как самостоятельно, так и с помощью удаленного рабочего места оператора станции спутниковой связи. Удаленное рабочее место оператора станции спутниковой связи может находиться как в локальной сети, так и использовать для доступа сеть Интернет.
На чертеже представлена блок-схема варианта исполнения системы автоматизации позиционирования (30) антенных систем, включающего три блока моторизации (2, 3, 4) и пульт дистанционного управления (22) (ДУ).
Система обеспечивает работу в следующих режимах работы, представленных в таблице 1.

| название | год | авторы | номер документа |
|---|---|---|---|
| АБОНЕНТСКАЯ ЗЕМНАЯ СТАНЦИЯ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2816866C1 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| Автоматизированный аппаратурный комплекс спутниковой открытой оптической связи | 2015 |
|
RU2608060C2 |
| СПОСОБ СПУТНИКОВОЙ СВЯЗИ, СИСТЕМА СПУТНИКОВОЙ СВЯЗИ И БОРТОВОЙ РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2486674C1 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ПОЗИЦИОНИРОВАНИЯ ДЛЯ МАЛЫХ АНТЕННЫХ СИСТЕМ | 2021 |
|
RU2766544C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| Способ и устройство создания преднамеренных помех спутниковой системе глобального позиционирования | 2024 |
|
RU2832277C1 |
Изобретение относится к антенной технике, в частности к системам автоматизации позиционирования антенных систем. Техническим результатом является повышение быстродействия, увеличение долговечности работы электродвигателей, снижение ошибки позиционирования и расширение функциональных возможностей. Результат достигается тем, что предложена система автоматизации позиционирования для больших антенных систем, содержащая источник переменного тока, контроллер автоматизации позиционирования и подключенные к нему приемник сигнала маяка и по меньшей мере один блок моторизации, включающий в себя электродвигатель, электронное устройство для управлением электродвигателем, энкодер и датчик температуры, при этом контроллер автоматизации позиционирования выполнен с возможностью обеспечения наведения станции спутниковой связи на спутник-ретранслятор и сопровождения спутника-ретранслятора с использованием аналоговых и/или цифровых приемников сигнала маяка, кроме того, система автоматизации содержит в себе модуль визуального контроля позиционирования, подключенный через оптоволоконную линию к контроллеру автоматизации позиционирования. 2 з.п. ф-лы, 1 ил., 1 табл.
1. Система автоматизации позиционирования для больших антенных систем, содержащая источник переменного тока, контроллер автоматизации позиционирования и подключенные к нему приемник сигнала маяка и по меньшей мере один блок моторизации, включающий в себя электродвигатель, электронное устройство для управлением электродвигателем, энкодер и датчик температуры, причем электронное устройство для управления электродвигателем выбрано в зависимости от типа электродвигателя антенной системы, к которой подключается блок моторизации, при этом контроллер автоматизации позиционирования выполнен с возможностью обеспечения наведения станции спутниковой связи на спутник-ретранслятор и сопровождения спутника-ретранслятора с использованием аналоговых и/или цифровых приемников сигнала маяка, кроме того, система автоматизации содержит в себе модуль визуального контроля позиционирования, состоящий из двух жидкокристаллических дисплеев, сенсорной клавиатуры, двух анализаторов спектров, вычислителя и GPS-приемника, подключенный через оптоволоконную линию к контроллеру автоматизации позиционирования, причем каждый из двух анализаторов спектров присоединен к антенной системе, а GPS-приемник обеспечивает синхронную работу модуля визуализации и контроллера автоматизации позиционирования.
2. Система по п. 1, отличающаяся тем, что в блоке моторизации электронное устройство для управления электродвигателем может быть разного типа, в зависимости от электродвигателя антенной системы: частотный преобразователь – для асинхронного электродвигателя, сервоусилитель – для синхронного электродвигателя, драйвер шагового двигателя – для шагового двигателя.
3. Система по п. 1 или 2, отличающаяся тем, что она дополнительно содержит подключенный к контроллеру автоматизации позиционирования приемник сигнала пульта ДУ, обеспечивающий возможность подключения проводного или беспроводного пульта дистанционного управления.
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| 0 |
|
SU193423A1 | |
| US 5517204 A1, 14.05.1996 | |||
| US 20120068899 A1, 22.03.2012. | |||

