Изобретение относится к способам повышения точности при определении углов пространственной ориентации судна (курса, крена и дифферента) по сигналам глобальных навигационных спутниковых систем (ГНСС). Предлагаемый способ может быть использован в мультиантенных системах ГНСС - судовых спутниковых компасах (при количестве приемных антенн ГНСС не менее трех), определяющих в реальном времени углы пространственной ориентации судна на основе разностных уравнений фазовых измерений с разрешением фазовой неоднозначности.
Спутниковый компас состоит, по крайней мере, их трех приемных антенн ГНСС, трех приемников ГНСС, формирующих измерения по фазе несущей, и вычислителя для решения задачи пространственной ориентации судна.
В качестве опорной системы координат для определения пространственной ориентации судна используют топоцентрическую систему координат (ТЦСК), которая связана с судном, и ее оси направлены соответственно: ось Y вдоль по местному меридиану, ось X дополняет систему до правой системы координат и направлена на восток по горизонтали, ось Z направлена вертикально вверх. Тогда углы пространственного положения судна относительно ТЦСК - курс, дифферент, крен, - определяются следующим образом: курс - угол вращения вокруг оси Z, дифферент - угол вращения вокруг оси X, крен - угол вращения вокруг оси Y.
В процессе решения задачи по разностям фазовых измерений ГНСС определяют координаты векторов, по крайней мере, двух антенных баз (векторов, соединяющих фазовые центры приемных антенн ГНСС) в прямоугольной геоцентрической системе координат, путем решения системы линеаризованных уравнений с оценкой фазовой неоднозначности в области целых чисел:

где  ,
,  - вектора положения антенн А и В в прямоугольной геоцентрической системе координат (ГЦСК);
- вектора положения антенн А и В в прямоугольной геоцентрической системе координат (ГЦСК);
ΔtAB - расхождение шкал времени приемников ГНСС А и В;
NAB - целое число циклов первых разностей фазовых неоднозначностей;
nAB - шумовая составляющая погрешности фазовых измерений.
Затем вычисляют проекции базовых линий в ТЦСК с помощью матрицы перехода:

где ϕ, λ - значения широты и долготы, соответствующие началу отсчета ТЦСК и системы координат, связанной с объектом (в общем случае - фазовый центр антенны А).
Аналогичным образом определяется вектор между фазовыми центрами антенн А и С для второй антенной базы.
Углы пространственной ориентации судна определяются из взаимной ориентации векторов антенных баз соответственно в ТЦСК, и в системе координат ОСК, связанной с судном (определяется конфигурацией антенной системы) из соотношения

где R(K, Θ, Ψ) - матрица последовательных вращений вокруг оси Z (по часовой стрелке) и вокруг осей Y и X (против часовой стрелки).
Инфраструктура судна, как правило, не позволяет обеспечить при установке приемных антенн ГНСС полностью открытое для приема спутниковых сигналов верхнее полупространство. Расположение вблизи антенной системы ГНСС мачт, труб и иных объектов является типичным для условий судна и вызывает так называемый эффект многолучевости, заключающийся в приеме суперпозиции прямого и отраженного от объекта инфраструктуры сигнала ГНСС. Эффект многолучевости может оказывать существенное негативное влияние на точность и надежность навигационных определений, особенно сильно это влияние может сказаться на качестве прецизионных дифференциальных решений на основе технологий обработки измерений ГНСС по фазе несущей (лежащих в основе алгоритмов определения курса, крена и дифферента мультиантенной системой ГНСС). Искажение фазового сигнала приводит не только к снижению точности вырабатываемых угловых навигационных параметров, но и к неприемлемому увеличению времени старта спутникового компаса, ложным фазовым решениям, срывам решения в контуре определения угловых параметров.
Несущая частота отраженного сигнала близка к несущей частоте прямого сигнала. Разность их частот невелика и вызвана разницей доплеровских сдвигов в точках прямого приема и отражения. Эта небольшая разность частот вызывает медленноменяющийся сдвиг фазы отраженного сигнала относительно прямого.
На фиг. 1 показано внесение сдвига фазы при отражении сигнала от объекта вблизи приемной антенны ГНСС: а) прямой фазовый сигнал, б) сдвиг фазы при сложении прямого сигнала с отраженным. Периодичность этого фазового сдвига оценивается единицами - десятками (до сотен) секунд. Фазовый сдвиг почти линейно нарастает во времени с указанной выше периодичностью переходов через 2π. При этом ошибки по фазе несущей, вызванные многолучевостью, лежат в пределах -4…4 см, а интервал корреляции данной погрешности для неподвижных объектов может составлять до нескольких часов, что затрудняет ее фильтрацию. В условиях судна низкочастотный характер многолучевой погрешности также не позволяет выполнить эффективное усреднение на малых интервалах времени.
Согласно проведенному патентному поиску по информационным базам ФГБУ ФИПС, WIPO и USPTO, выявлены следующие основные методы уменьшения ошибки многолучевости:
а) сглаживание измерений (RU 2432585);
б) аппаратная защита приемных антенн ГНСС от нижних и боковых лучей (RU 2008148669, RU 2010148760);
в) построение корреляторов следящих систем ФАП и ССЗ, отсекающих запаздывающий отраженный сигнал (US 6541950).
Предлагаемый способ защиты от негативного влияния многолучевости на основе построения и дальнейшего использования пространственной модели переотражений спутниковых сигналов от объектов инфраструктуры в окрестности установки антенной системы ГНСС не требует модернизации аппаратуры СНС и использует серийные мультиантенные спутниковые навигационные системы (спутниковые компасы), обеспечивает построения пространственной модели отражения радиосигналов ГНСС от инфраструктуры судна с помощью мультиантенных систем, непосредственно установленных на судне. Отличие предложенного способа от описанного в US 20080082266 в том, что в компенсации погрешностей используется построенная пространственная модель многолучевости судна и может быть реализована как в спутниковых компасах, так и в интегрированных навигационных системах с глубокой и слабой интеграцией.
Устройство, к которому относится заявленный способ, содержит три (или более) приемных антенны ГНСС, три приемника ГНСС, формирующих измерения полной фазы несущей, и вычислитель, в котором по фазовым измерениям определяются углы пространственной ориентации судна, а также строится модель, определяющая величины погрешности, вносимой в фазовые измерения ГНСС при отражении спутниковых сигналов от объектов, окружающих антенную систему. Параметрами модели является пространственное направление прихода сигнала спутника на антенну.
В основе рассматриваемого способа лежит предположение о том, что при относительной неподвижности приемной антенны ГНСС и отражающего предмета друг относительно друга спутниковый сигнал, приходящий в различные моменты времени с одного и того же направления, вносит одну и ту же погрешность в измерительную информацию оборудования ГНСС.
Принцип построения пространственной модели переотражений заключается в построении зависимостей ошибки многолучевости от направления прихода спутникового радиосигнала в некоторой системе координат, жестко связанной с приемной антенной ГНСС и отражающим предметом:
δ(Z)=ƒ(ϕ, θ),
где Z - измеренный параметр ГНСС;
ϕ - азимут источника радиосигнала в связанной с судном системе координат;
θ - угол возвышения источника радиосигнала в связанной с судном системе координат.
В качестве измеренного параметра Z в предлагаемом способе рассматриваются «первые фазовые разности» - разности фазовых измерений на двух антеннах по одному и тому же спутнику ГНСС.

где ,
,  - вектора положения антенн А и В в геоцентрической системе координат (ГЦСК);
- вектора положения антенн А и В в геоцентрической системе координат (ГЦСК);
ΔtAB - расхождение шкал времени приемников А и В;
NAB - целое число циклов первых разностей фазовых неоднозначностей;
δ(Z) - погрешность, вызванная влиянием многолучевости;
nAB - шумовая составляющая погрешности фазовых измерений.
Соответственно оцениваемый параметр δ(Z) представляет разность погрешностей, вызванных отраженным сигналом, на антеннах А и В.
Построение модели осуществляется путем калибровки, заключающейся в оценке величины погрешности δ(Z), вызванной переотражением сигналов, приходящих с различных направлений и выявлением закономерностей приведенного выше вида.
Продолжительное наблюдение всех видимых спутников ГНСС с фиксацией погрешности переотражения на каждую эпоху наблюдений позволяет построить сетку с минимально возможным шагом на верхней полусфере, связанной с антенной и отражающим объектом системы координат, и определить значения калибровочных поправок за влияние многолучевости в узлах этой сетки.
Модель строится на основе определения остаточных нескомпенсированных погрешностей в первых разностях фазовых измерений, получаемых после оценки и исключения из этих измерений геометрических дальностей до спутников ГНСС, целочисленных фазовых неоднозначностей и расхождения шкал времени ГНСС и приемников. В предположении отсутствия иных погрешностей остаточные значения полагаются вызванными влиянием переотражений спутникового сигнала от окружающих предметов.
При построении модели каждому значению нескомпенсированной погрешности сопоставляется положение спутника на небесной полусфере в горизонтной системе координат (ГСК):
δ(ΔФАВ)←(ϕГСК, θГСК),
где ϕГСК - азимут спутника, с которого получен сигнал;
θГСК - угол возвышения спутника над горизонтом;
δ(ΔФАВ) - нескомпенсированная погрешность первых разностей фазовых измерений для антенн А и В.
Ориентация объектовой системы координат (жестко связанной с судном) относительно ГСК однозначно определяется тремя углами пространственной ориентации объекта (K, Θ, Ψ) - курсом, креном и дифферентом, которые также определены с высокой точностью штатными средствами спутникового компаса.
Значения δ(ΔФАВ), полученные по всем спутникам ГНСС за время проведения наблюдений, затем подвергаются обработке с целью формирования двумерного массива значений погрешностей многолучевости на полусферической сетке с основанием, совпадающим с плоскостью палубы судна, и заданным шагом Δ, определяемым длительностью наблюдений.
Значения в узлах сетки определяются по методу наименьших квадратов на основе всей накопленной информации. Путем анализа выявляются области, значения погрешности в которых превосходят по модулю 0,1 фазового цикла (и, соответственно, могут оказывать негативное влияние на точность навигационных определений). Для каждой из выявленных областей строится пространственная модель многолучевости в виде разложения в двумерный ряд Тейлора:
δ(ϕ, θ)=а0+а1ϕ+а2θ+а3ϕ2+а4θ2+а5ϕθ,
где ϕ, θ - азимут и угол возвышения НКА в объектовой (связанной с судном) системе координат;
а 0… а 5 - параметры модели.
Погрешность δ(ϕ, θ) является функцией азимута и угла возвышения спутника ГНСС в объектовой (связанной с судном) системе координат (ОСК). Указанные направления прихода спутникового сигнала могут быть определены из значений азимута и угла возвышения спутника в ГСК с учетом текущих значений параметров полной пространственной ориентации судна:
(ϕ, θ)=ƒ(ϕГСК, θГСК, K, Θ, Ψ),
где K, Θ, Ψ - курс, крен и дифферент судна соответственно;
ϕГСК _ азимут спутника в ГСК;
θГСК - угол возвышения спутника в ГСК.
Таким образом, учет калибровочных поправок модели в разностных уравнениях позволит компенсировать негативное влияние многолучевости в спутниковом компасе вне зависимости от ориентации судна относительно спутников ГНСС и его динамики.
Заявляемая модель изобретения пояснена на чертежах:
на фиг. 1 показано внесение сдвига фазы при отражении сигнала от объекта вблизи приемной антенны ГНСС: а) прямой фазовый сигнал, б) сдвиг фазы при сложении прямого сигнала с отраженным.
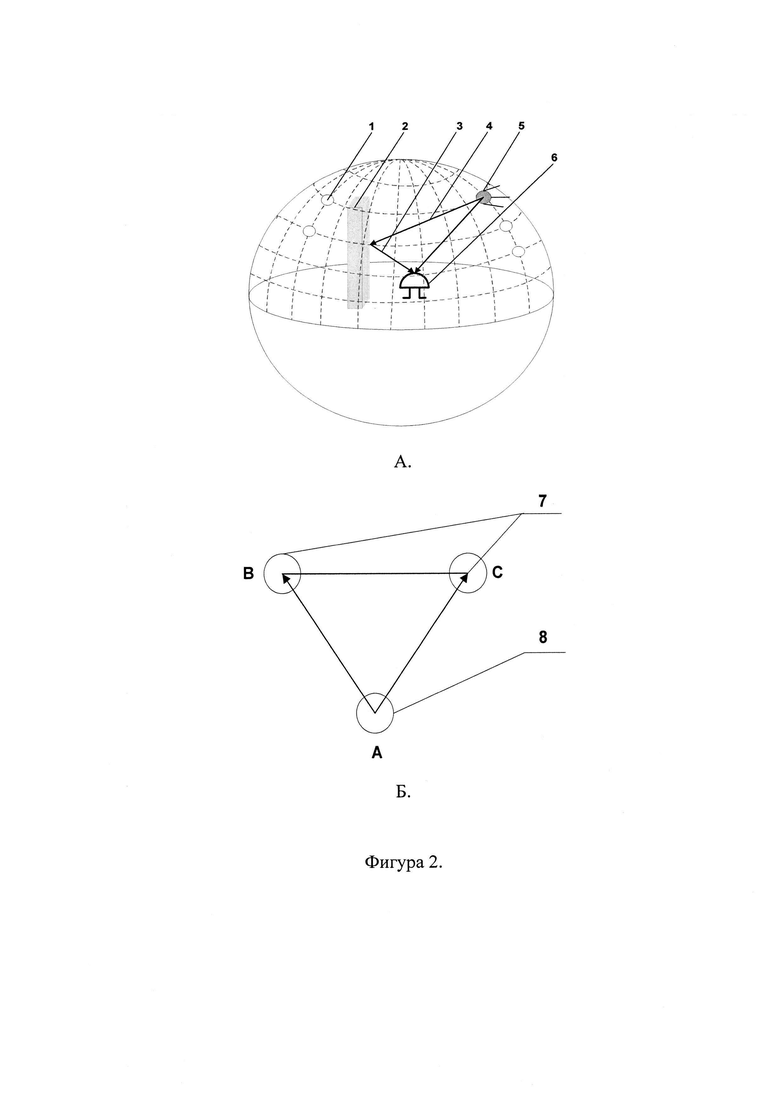
на фиг. 2.А схематично изображен прием отраженных от судовой инфраструктуры спутниковых сигналов; на фиг. 2.Б схематично изображена антенная система из трех антенн ГНСС, используемая при определении углов пространственной ориентации.
На фиг. 2.А, фиг. 2.Б введены следующие обозначения позиций: 1 - узлы сетки для построения пространственной модели; 2 - отражающий объект судовой инфраструктуры; 3 - отраженный спутниковый сигнал; 4 - прямой спутниковый сигнал; 5 - спутник ГНСС; 6 - приемная антенна ГНСС; 7 - определяемые антенны антенной системы ГНСС; 8 - базовая антенна антенной системы ГНСС.

Изобретение относится к способам повышения точности определения углов пространственной ориентации по сигналам глобальных навигационных спутниковых систем (ГНСС) путем компенсации влияния отраженных от объектов инфраструктуры судна с использованием геометрической модели отражений сигналов ГНСС на объекте (судне). Достигаемый технический результат – защита от негативного влияния многолучевости. Указанный результат достигается путем построения пространственной модели влияния отраженных от корпусных конструкций судна радиосигналов глобальных навигационных спутниковых систем (ГНСС) на изменение разностей фаз радиосигналов в приемных пространственно разнесенных антеннах, параметры пространственной модели определяются с учетом положения навигационных спутников ГНСС относительно корпуса судна и используются для коррекции разностей фаз от пространственно разнесенных приемных антенн ГНСС. 2 ил.
Способ определения курса, крена и дифферента судна по радиосигналам глобальных навигационных спутниковых систем (ГНСС) путем измерения в реальном времени разностей фаз с разрешением фазовой неоднозначности радиосигналов от трех (и более) пространственно разнесенных антенн, расположенных на открытых для приема спутниковых радиосигналов частях судна в произвольной геометрической конфигурации, отличающийся тем, что строится пространственная модель влияния отраженных от корпусных конструкций судна радиосигналов на изменение разностей фаз радиосигналов в приемных пространственно разнесенных антеннах, параметры пространственной модели определяются с учетом положения навигационных спутников ГНСС относительно корпуса судна и используются для коррекции разностей фаз от пространственно разнесенных приемных антенн ГНСС.
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| US 5751244 A, 12.05.1998 | |||
| US 20100117894 A1, 13.05.2010 | |||
| WO 2009034671 A1, 19.03.2009 | |||
| Способ получения листового стекла | 1985 |
|
SU1275012A1 |

