Изобретение относится к области гидроакустической метрологии, а именно измерению параметров гидроакустических полей подвижных морских объектов.
Одним из основных факторов, определяющих эффективность гидроакустических средств наблюдения, является уровень интенсивности акустических полей объектов наблюдения. В силу различий в определении самого термина «физическое поле» в различных источниках, в последующем под ним будем понимать «пространственно-временное распределение конкретного параметра определенной физической величины в некоторой среде» [1]. Трудно представить себе подвижный морской объект, не имеющий гидроакустического поля. Так, простое перемещение физического тела в воде, например, сбрасываемой с борта специального судна мины, сопровождается создаваемым им гидродинамическим полем, относящимся к т.н. первичным, создаваемым самим объектом гидроакустическим полям. Гораздо большим уровнем интенсивности характеризуются шумовые сигналы, создаваемые работающими винтами и механизмами, вибрацией корпуса кораблей и судов, а также сигналы, излучаемые активными гидроакустическими средствами кораблей. Кроме этого, все морские объекты, в силу отличия их волновых сопротивлений от таковых для морской среды, обладают т.н. вторичным гидроакустическим полем, или полем переизлучения.
Интерес к информации об уровне первичного и вторичного полей связан с тем, что они являются первоисточником обнаружения их «создателей» при отсутствии возможности визуального наблюдения, в первую очередь, это подводные объекты, гидроакустическое поле которых относится к наиболее энергоемким по характеристикам обнаружения в морской среде. Этот интерес возрастает еще и в связи с тем, что кроме сведений об уровне интенсивности гидроакустических полей потребителей информации о них интересуют и другие характеристики последних. Так, в соответствии с принятым выше определением, характеристика гидроакустического поля предполагает обязательное наличие информации о направленных свойствах создающих это поле источников и сведения о его частотных параметрах, тем более, что обе группы параметров имеют вероятностный характер в силу случайного характера влияющих на них внешних факторов.
В настоящее время информация о названных параметрах, ввиду отсутствия достаточно адекватной количественной модели поля, носит весьма скудный характер, типа того, что характеристика направленности первичного поля подводной лодки имеет форму «бабочки» с уменьшением на острых кормовых (маскировка кильватерным следом) и носовых (маскировка корпусом) углах по горизонтали [1] и почти полным отсутствием сведений о характеристиках направленности поля в вертикальной плоскости. Все сказанное выше обусловило более глубокое внимание и необходимость выработки практических рекомендаций к объекту изобретения для последующей реализации.
В качестве количественных характеристик первичного гидроакустического поля в теории и на практике используют значения акустического давления или связанного с ним значения колебательной скорости, стандартные значения которых Приведены к расстоянию в один метр, частоте один килогерц и полосе один герц для первичного поля. В качестве количественного параметра вторичного поля, используют значение в метрах радиуса сферы, эквивалентной по отражательной способности объекту, которое и входит в расчетные формулы для дальности действия средств обнаружения.
В качестве количественного параметра вторичного поля, т.е. отражательной способности морских объектов, принято значение в метрах радиуса эквивалентной по этому параметру сферы, которое используется в расчетных формулах для дальности обнаружения морских объектов.
Прототипом изобретения принят используемый в настоящее время способ однократного замера давления акустического поля при проходе морских объектов на заданном расстоянии в 50 м и курсовом угле 90 градусов, т.е. на траверзе объекта, реализуемый с помощью аппаратуры специальных судов, т.н. гидроакустических контрольных станций (ГКС) [2]. Основным недостатком прототипа является отсутствие имеющей практический интерес информации о направленных свойствах гидроакустических полей морских подвижных объектов (за исключением, может быть, упоминания в некоторых источниках о разбросе значений интенсивности первичного поля для разных курсовых углов до 20 дБ), в то время, как измерение параметра в одной точке поля не обеспечивает требуемой полноты и достоверности данных, необходимых при оценке тактических возможностей противостоящих сил в дуэльных ситуациях.
Устранение этого недостатка предполагается осуществить в виде совершенствования способа измерения параметров первичного и вторичного гидроакустических полей для основных режимов движения с получением в результате характеристику их направленности, представляемой в виде диаграммой направленности, а также временного распределения значений параметров в виде спектра частот.
Основным элементом, составляющим сущность предлагаемого способа, является то, что измерение параметров полей производится при контролируемом во времени маневрировании объекта, т.е. с одновременным фиксированием курсового угла и расстояния между объектом и антенной в дискретные моменты времени. Идеальным способом в данном случае оказалась бы сооружение гидроакустического полигона с дискретным расположением приемных антенн по окружности с шагом не более 10° и радиусом, обеспечивающим проведение измерений в дальнем поле [1]. Пространственное распределение значений измеряемых параметров, т.е. характеристику направленности поля, получают путем фиксирования значений измеряемого параметра каждым приемником в момент пересечения объектом центра окружности. Однако полный контроль поля, по его определению, включает, кроме пространственного, еще и временное распределение значений его параметра, т.е. спектра, что выполнимо в случае синхронного перемещения, как объекта, так и антенны измерительного комплекса, что в данном случае практически невыполнимо.
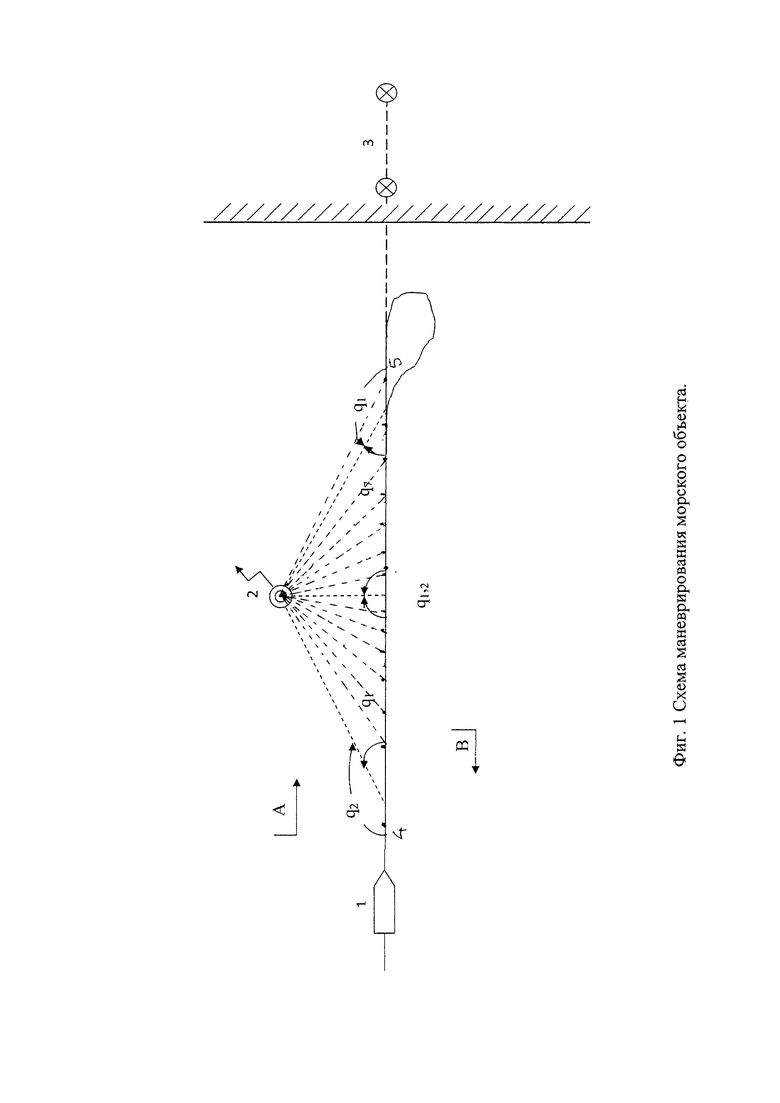
По этой причине в предлагаемом варианте контроля полей подвижного объекта (1 на фигуре) измерения параметров полей, в отличие от прототипа, проводят с одновременным фиксированием значений курсового угла, на котором находится объект, и расстояния между объектом и антенной, с последующим приведением полученного значения к стандартному уровню по формуле 
Заданными элементами программы измерений при реализации предлагаемого способа контроля гидроакустических полей в виде определения характеристик их направленных свойств и частотного спектра по замеренным параметрам шумоизлучения или отражения зондирующих сигналов определены:
- параметры и место установки измерительного комплекса и его приемоизлучающих элементов (2);
- исходная и конечная точки измерительной прямолинейной трассы маневрирования объекта на прямом (4…5) и обратном (5…4) галсах;
- курсы и скорости маневрирования на выделенном створе (3);
- периодичность интервалов между контрольными точками с заданными значениям курсовых углов в диапазоне 10°-170° обоих бортов.
Как нетрудно заметить, точность контроля гидроакустических полей подвижных морских объектов определяется не только техническими характеристиками измерительной аппаратуры в измерении параметров поля, например, акустического давления, но и точностью установки значений курсовых углов и расстояния, используемых при построении диаграмм контролируемых полей.
Техническим результатом изобретения следует считать получение количественной характеристики направленности гидроакустического поля подвижных морских объектов, т.е. зависимости его измеряемых параметров от собственных курсовых углов объектов, в виде ее диаграммы, позволяющей более успешно решать задачи по эксплуатации и применению по назначению данных объектов.
Технический результат достигается тем, что определение характеристик направленности гидроакустических полей при изменении своего курсового угла на приемоизлучающую антенну измерительного комплекса объекты осуществляют в ходе маневрирования относительно антенны измерительного комплекса по прямому и обратному галсам в выделенном створе с минимальным по траверзу в 2 кабельтова и максимальным по конечным носовому и кормовому курсовым углам, в 5 кабельтовых расстоянием между ними и конечный результат в виде диаграммы направленности получают последующим пересчетом измеренных значений параметров к стандартному уровню, а именно, расстоянию 1 м, частоте 1 кГц и полосе частот 1 Гц).
Источники информации
1. Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике. Л.: Судостроение, 1988 г.
2. Покровский В.А., Щеглов Г.А. Эксплуатация судовых ГАС. Л.: Судостроение, 1980 г.
3. Устименко С.П. Щеглов Г.А. Моделирование гидроакустических полей морских объектов. Труды НИЦ РЭВ ВМФ. СПб., 2017 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Способ определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта | 2022 |
|
RU2799388C1 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2573626C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории | 2019 |
|
RU2724366C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
Использование: изобретение относится к области гидроакустической метрологии, а именно измерению параметров гидроакустических полей подвижных морских объектов. Сущность: измерение характеристик направленности гидроакустических полей подвижных подводных объектов проводят при изменении курсового угла объектов в процессе маневрирования относительно приемоизлучающей антенны измерительного комплекса по прямому и обратному галсам в выделенном створе с минимальным по траверзу в 2 кабельтова и максимальным по конечным носовому и кормовому курсовым углам в 5 кабельтовых расстоянием между ними и конечный результат получают последующим пересчетом измеренных значений параметров к стандартному уровню: расстоянию 1 м, частоте 1 кГц, полосе частот 1 Гц для первичного поля и к значению в метрах радиуса отражающей эквивалентной сферы для вторичного поля. Технический результат: получение количественных характеристик направленности гидроакустических полей подвижных морских объектов. 1 ил.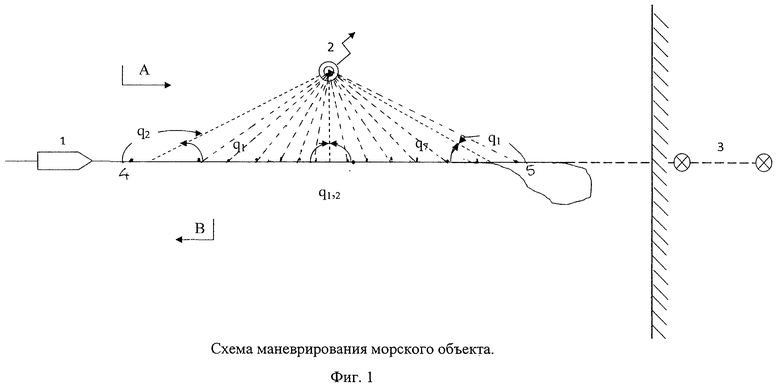
Способ контроля гидроакустических полей подвижных морских объектов, включающий установку приемоизлучающей антенны измерительного комплекса в определенной точке специального полигона и замер выбранного параметра поля на фиксированном расстоянии между проходящим с заданной скоростью объектом и антенной, отличающийся тем, что для определения характеристики направленности гидроакустических полей изменение своего курсового угла объекты осуществляют путем маневрирования относительно антенны измерительного комплекса по прямому и обратному галсам в выделенном створе с минимальным по траверзу в 2 кабельтовых и максимальным на оконечных носовом и кормовом курсовых углах в 5 кабельтовых расстоянием между ними и конечный результат в виде диаграммы направленности поля получают пересчетом полученных значений параметров к стандартному уровню, а именно расстоянию 1 м, частоте 1 кГц и полосе частот 1 Гц для первичного поля и к значению в метрах радиуса отражающей эквивалентной сферы – для вторичного поля.
| Борисенко К.П., Митько В.Б | |||
| Гидроакустические комплексы надводных кораблей | |||
| Принципы построения и решаемые задачи | |||
| - СПб.: Изд-во СПбМТУ, 2012 | |||
| Л.К | |||
| Самойлов | |||
| Электронное управление характеристиками направленности антенн | |||
| Библиотека инженера-гидроакустика | |||
| Ленинград, "Судостроение", 1987, стр | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |

