Изобретение относится к области транспортного машиностроения и может быть использовано при экспериментальном исследовании динамической нагруженности энергосилового блока транспортной машины (ЭСБТМ) в процессе испытаний.
Одной из задач создания конструкций перспективных ЭСБТМ и модернизации существующих является экспериментальная оценка динамической нагруженности в процессе ходовых испытаний для оценки корректности допущений, принятых при моделировании, сбора информации для выполнения расчетов на прочность и долговечность.
Известен способ экспериментального определения динамического момента (аналог: Шушкевич В.А. Основы электротензометрии. Минск, «Вышейш. Школа», 1975. 352 с. с ил., рис. 21, стр. 121, рис. 22, стр. 122 и рис. 23, стр. 124) заключающийся в установке на вращающие детали ЭСБТМ тензометрических датчиков, измерительной системы, последующей регистрации и статистической обработки данных. В этом случае требуется введения в измерительную систему устройств для контактной (токосъемники) или бесконтактной (телеметрия) передачи сигналов с датчиков, установленных на вращающихся деталях, и обеспечения их питающим напряжением, для последующей обработки. Такой способ характеризуется сложностью измерений и обработки информации, а так же ограниченным ресурсом элементов системы.
В современных и перспективных конструкциях транспортных машин создаются бортовые информационно-измерительные управляющие системы (БИИУС), включающие датчики для измерения угловой скорости элементов ЭСБТМ и задающие управляющие воздействия (прототип: Щербин A.M. Современные бортовые информационно-управляющие системы автомобильной техники, Журнал автомобильных инженеров, №3, 2015, с. 26-29). Это позволяет определить момент двигателя при известной его внешней скоростной характеристике по измеренным значениям угловой скорости вращения вала двигателя и положения органа управления подачей топлива. Такой способ обеспечивает измерение действующего (статического) момента двигателя, возможность управления движением транспортной машины, диагностику технического состояния, решение др. задач, но не обеспечивает точного измерения динамического момента и анализа источников его формирования. Реальный динамический момент существенно отличается от значения, определенного по алгоритмам расчета, заложенным в БИИУС. Динамический момент содержит высокочастотные составляющие, формируемые механизмами двигателя: кривошипно-шатунным (КШМ) и газораспределительным (ГРМ), а так же генерируемые динамическими процессами в масляных насосах, гидротрансформаторе, электрогенераторе, движителе машины и др., которые не стабильны во времени и наиболее точно определяются спектральной плотностью процесса. Именно динамический момент (его периодические составляющие, характеризуемые амплитудами, частотами и фазами) определяет долговечность элементов конструкции ЭСБТМ.
В предлагаемом способе определение динамического момента в элементах ЭСБТМ осуществляется, как и в прототипе по результатам измерения угловой скорости датчиком БИИУС.Сущность и новизна способа состоят в определении динамического момента как произведения момента инерции i-го элемента динамической системы на угловое ускорение:
где  - угловое ускорение вала двигателя;
- угловое ускорение вала двигателя;
Ji - момент инерции i-го элемента динамической системы.
Функция углового ускорения определяется по результатам измерения и дифференцирования, выделенных из суммарного сигнала высокочастотных периодических отклонений угловой скорости, наводимых (модулирующих) на несущую частоту импульсов датчиков (частоту прохождения меандра). Полезный (искомый) сигнал модулирующей частоты возникает вследствие функционирования различных механизмов, формирующих возмущающие воздействия. Например, на маховике двигателя таковыми возмущениями могут быть порядковые частоты моторных гармоник ДВС, возмущения от колебаний генератора на собственной частоте, возмущения от ГРМ и масляного насоса двигателя, возмущения от колебаний дотрансформаторной зоны гидромеханической трансмиссии и др. При этом аппаратное обеспечение должно, в соответствии с теоремой Котельникова-Шеннона, обеспечивать требуемую частоту опроса датчика, а программа обработки поддерживать функции фильтрации, прямого-обратного преобразования Фурье, циклические функции определения частоты, дифференцирования и др.
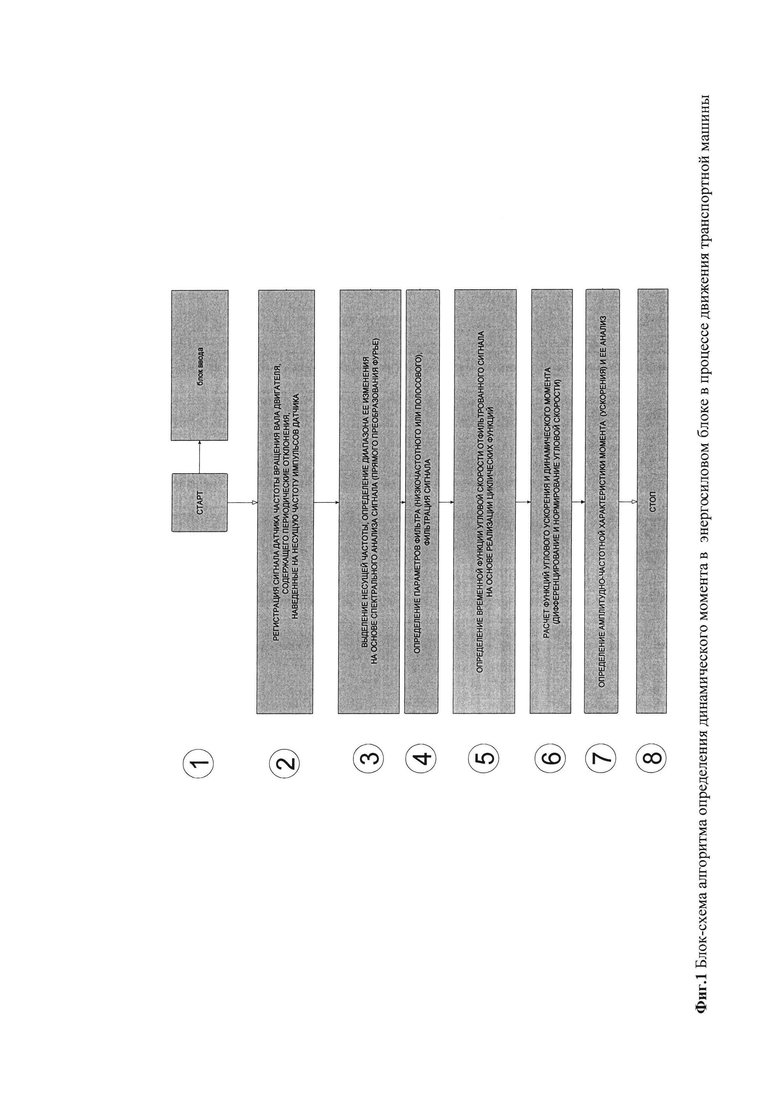
Блок-схема алгоритма определения динамического момента в энергосиловом блоке в процессе движения транспортной машины приводится на фиг. 1.
В блоке 1 формируются исходные данные, а в блоке 2 сигнал с датчика частоты вращения вала двигателя оцифровывается и передается на устройство регистрации и обработки. В блоке 3 на основе спектрального анализа сигнала (прямое преобразования Фурье) осуществляется выделение несущей частоты и определение диапазона ее изменения. В блоке 4 выполняется определение параметров низкочастотного или полосового фильтра, осуществляется фильтрация сигнала. На основе применения циклических функций (вычисление частоты каждого цикла) в бл. 5 определяются временная функция отфильтрованного сигнала (круговая частота модулирующего сигнала, наведенного на несущую частоту (модулируемую). Дифференцированием и нормированием этой функции (бл. 6) определяется угловое ускорение двигателя  и соответственно функции динамического момента
и соответственно функции динамического момента  На основе прямого преобразования Фурье (бл. 7) определяется амплитудно-частотная функцию момента, включающую основные моторные гармоники двигателя, гармонические составляющие, формируемые КШМ и ГРМ двигателя, приводом генератора, колебаниями в трансмиссии и др. В блоке 8 завершается выполнение алгоритма. Таким образом, предложенный способ позволяет по сигналам датчиков угловой скорости вала двигателя определить величину динамического момента и его структурные составляющие.
На основе прямого преобразования Фурье (бл. 7) определяется амплитудно-частотная функцию момента, включающую основные моторные гармоники двигателя, гармонические составляющие, формируемые КШМ и ГРМ двигателя, приводом генератора, колебаниями в трансмиссии и др. В блоке 8 завершается выполнение алгоритма. Таким образом, предложенный способ позволяет по сигналам датчиков угловой скорости вала двигателя определить величину динамического момента и его структурные составляющие.
Полученные значения позволяют определить динамическую нагруженность и прогнозировать вероятностную оценку долговечности элементов энерго-силового блока транспортной машины, а так же определять источники формирования динамических составляющих момента.
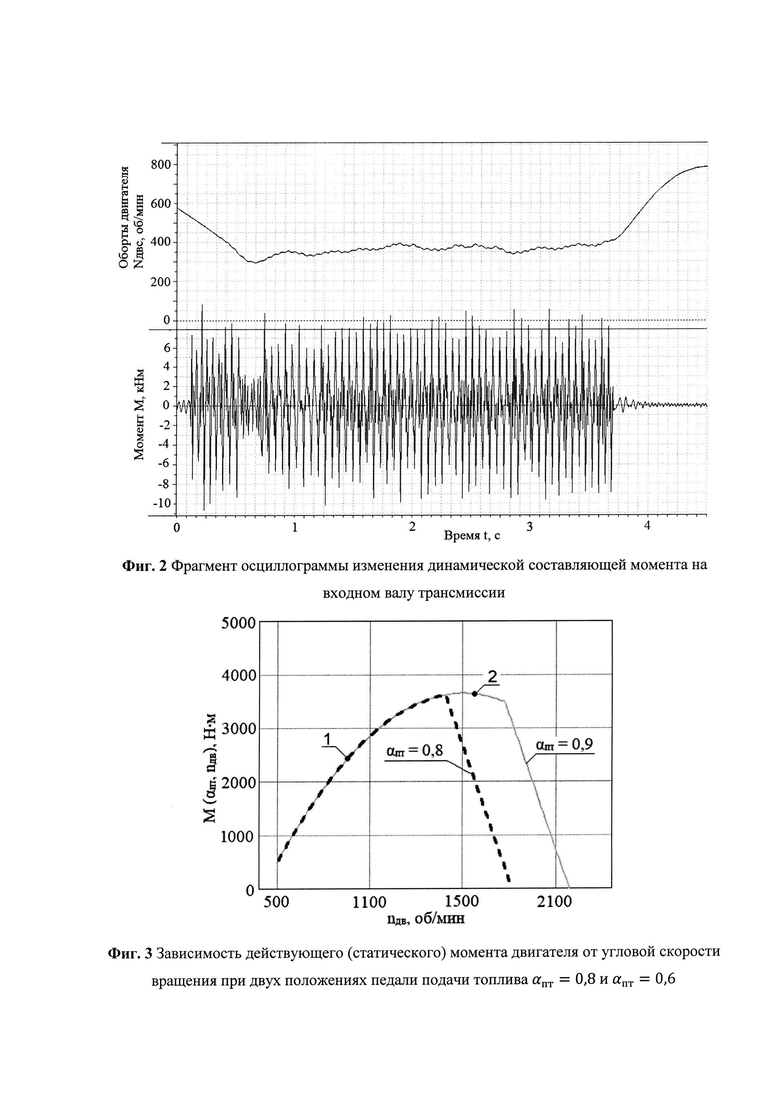
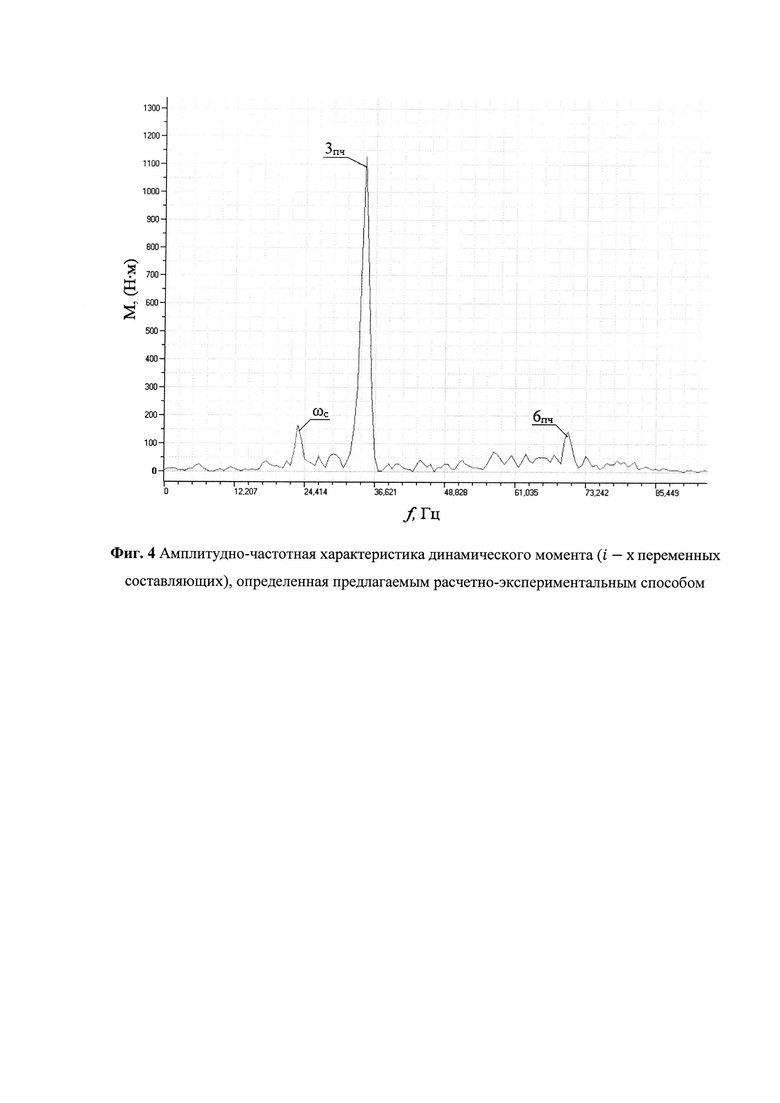
Эффективность предлагаемого способа определения динамического момента, иллюстрируется фиг. 2-4. На фиг. 2 показан фрагмент осциллограммы изменения динамической составляющей момента на входном валу трансмиссии. Фиг. 3 иллюстрирует зависимость действующего (статического) момента двигателя от угловой скорости вращения при двух положениях педали подачи топлива αпт=0,8 и αпт=0,9. Графики построены по результатам измерения угловой скорости вала двигателя ωq и положения органа управления подачей топлива (определяются по CAN - шине БИИУС). Зависимость Mq(αпт,ωq) соответствует статической характеристике испытуемого двигателя. Фиг. 4 иллюстрирует определенный предлагаемым расчетно-экспериментальным способом набор i-х переменных составляющих динамического момента, в общем случае характеризуемых амплитудой, частотой, и фазой (Ai, ωi, и ϕi). Для рассматриваемого случая максимальное значение динамического момента соответствует 3-й гармонике двигателя, являющейся основным источником динамического момента (возбуждения). В других случаях, на амплитудно-частотной характеристике могут присутствовать переменные составляющие динамического момента, формируемые механизмами дизельного двигателя (КШМ и ГРМ, приводом генератора, колебаниями в трансмиссии и др.). Данное представление динамического момента (результат обработки сигнала датчика угловой скорости двигателя) дает возможность точно определять и прогнозировать динамическую нагруженность элементов конструкции ЭСБТМ, обоснованно формировать блоки нагружения, отображающие совокупность уровней напряжений и соответствующих им чисел циклов, которые деталь нарабатывает в переделах единицы параметра долговечности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИВЕДЕННОГО МОМЕНТА ИНЕРЦИИ ДОТРАНСФОРМАТОРНОЙ ЗОНЫ ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2015 |
|
RU2581891C1 |
| Способ гашения низкочастотных колебаний в трансмиссии транспортной машины | 2019 |
|
RU2735455C1 |
| Способ исключения резонансных режимов в фрикционных дисках гидромеханической трансмиссии транспортной машины | 2019 |
|
RU2728584C1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ПОВОРАЧИВАЮЩЕГО МОМЕНТА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2665159C1 |
| Система защиты двигателя гусеничной и колесной машины от заброса по оборотам коленчатого вала | 2023 |
|
RU2817434C1 |
| Способ определения временных и частотных параметров микропрофиля опорного основания в режиме реального времени | 2024 |
|
RU2833836C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ РЕЗОНАНСНОГО РЕЖИМА ИЗ ДОТРАНСФОРМАТОРНОЙ ЗОНЫ ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2011 |
|
RU2464463C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
Изобретение относится к транспортному машиностроению. Способ расчетно-экспериментального определения динамического момента в энергосиловом блоке транспортной машины заключается в определении действующего момента двигателя по сигналам датчиков частоты вращения вала двигателя и положения органа управления подачей топлива. На основе спектрального анализа сигнала датчика частоты вращения двигателя осуществляется выделение несущей частоты и определение диапазона ее изменения. На основе применения циклических функций для вычисления частоты каждого цикла определяются временная функция отфильтрованного модулирующего сигнала, наведенного на несущую модулируемую частоту. Дифференцированием и нормированием этой функции определяется угловое ускорение вала двигателя и соответственно функция динамического момента. На основе прямого преобразования Фурье определяется амплитудно-частотная функция момента. Осуществляется экспериментальная оценка динамической нагруженности. 4 ил.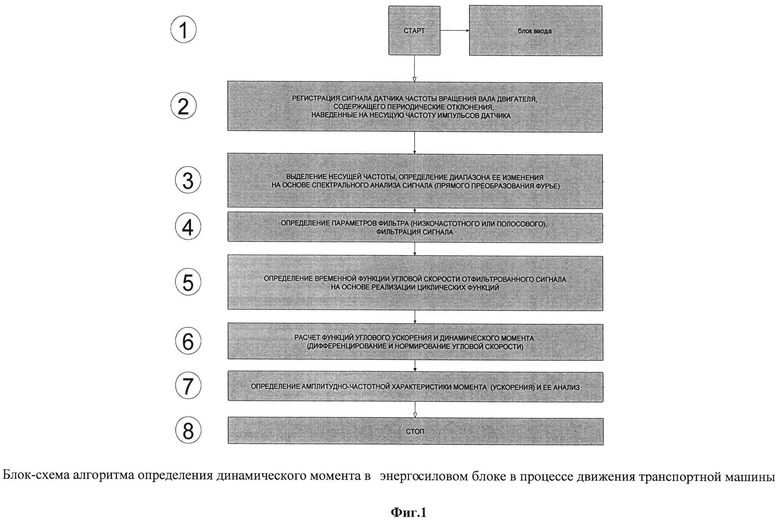
Способ расчетно-экспериментального определения динамического момента в энергосиловом блоке транспортной машины, оснащенной бортовой информационной измерительной управляющей системой, включающей датчики угловой скорости вращения вала двигателя и положения органа управления подачей топлива, соединенные с бортовым компьютером, заключающийся в определении действующего момента двигателя по сигналам датчиков частоты вращения вала двигателя и положения органа управления подачей топлива, отличающийся тем, что при обработке сигнал датчика частоты вращения вала двигателя оцифровывается и передается на устройство регистрации и обработки, на основе спектрального анализа сигнала осуществляется выделение несущей частоты и определение диапазона ее изменения, на основе применения циклических функций для вычисления частоты каждого цикла определяются временная функция отфильтрованного модулирующего сигнала, наведенного на несущую модулируемую частоту, дифференцированием и нормированием этой функции определяется угловое ускорение вала двигателя и соответственно функция динамического момента 
где - угловое ускорение вала двигателя;
- угловое ускорение вала двигателя;
Ji - момент инерции i-го элемента динамической системы;
в дальнейшем, на основе прямого преобразования Фурье определяется амплитудно-частотная функция момента, включающая основные моторные гармоники двигателя, гармонические составляющие, формируемые механизмами кривошипно-шатунным и газораспределения двигателя, приводом генератора, колебаниями в трансмиссии.
| Устройство для защиты телефонных установок от акустического удара | 1927 |
|
SU8065A1 |
| Способ двухступенчатого тонкого помола какао, кофе, крупяных и др. продуктов и установка для его осуществления | 1950 |
|
SU121332A1 |
| Способ исключения резонансных режимов в фрикционных дисках гидромеханической трансмиссии транспортной машины | 2019 |
|
RU2728584C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |

