Предлагаемое изобретение относится к области космонавтики и предназначено для управления антенным комплексом с недостаточно широкой диаграммой направленности относительно угловых амплитуд траектории подспутниковой точки космического аппарата при обеспечении тракта информации с космическим аппаратом (связь, ДЗЗ и др.) на квази-геостационарной орбите.
В качестве ближайшего аналога выбрана публикация «An antenna mount for tracking geostationary satellites» (J Dijk, E.J. Maandersand, J.M.J. Oostvogels, май 1977, Нидерланды) по разработке специальной двигательной установки наземного антенного комплекса для работы с космическими аппаратами на геостационарной орбите. Недостатком данной двигательной установки антенного комплекса можно отнести ее исключительное назначение для обеспечения приема и передачи информации в тракте связи с космическим аппаратом на геостационарной орбите в окрестностях точки его стояния, что делает невозможным ее применение для информационного тракта с космическим аппаратом на иных орбитах – отсутствие принципа взаимозаменяемости в части полноповоротной двигательной установки. Вторым ограничивающим фактором можно отнести сложность технической реализации и ограниченность математического аппарата.
Математический аппарат описания траекторий орбит космического аппарата на основе фигур Лиссажу (орбиты Лиссажу) применяется в моделировании движения космического аппарата в окрестностях точек Лагранжа (L1 и L2 в системе Земля – Луна), предложенный в патенте US 7744036 В2, 29.06.2010 и др. публикациях. В данных публикациях отсутствуют сведения об аналитическом способе управления антенным комплексом приема информации с космического аппарата на квази-геостационарной орбите на основе известной фигуры Лиссажу с учетом наиболее существенных для этой орбиты возмущающих факторов.
В развитие известных решений, предлагается аналитический способ управления антенным комплексом приема информации с космического аппарата на квази-геостационарной орбите относительно геоцентрических координат подспутниковой точки в начальный момент времени.
Предложен способ управления наземным антенным комплексом для обеспечения приема и передачи информации в тракте связи с космическим аппаратом на квази-геостационарной орбите, в котором управление антенным комплексом приема информации с космического аппарата на квази-геостационарной орбите осуществляется относительно координат подспутниковой точки в начальный момент времени в геоцентрической системе координат. В предложенном способе суточная траектории подспутниковой точки аппроксимируется фигурой Лиссажу и наведение антенного комплекса осуществляется в геометрический центр положений космического аппарата в моменты времени ti (i=1.2,…m), заданные с постоянным шагом на интервале времени прогнозирования движения космического аппарата Тпр, по условию устойчивости тракта связи между антенным комплексом и космическим аппаратом на квази-геостационарной орбите Fдоп–Fi≥Fзап, где Fi – фактический угол между вектором текущего положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра; Fдоп – максимальный допустимый угол между вектором текущего положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра, определяемый диаграммой направленности антенны и коэффициентом усиления; Fзап – запас по углу F между вектором положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра, определяющий закон управления по углу F. Способ будет реализован в системе управления наземным антенным комплексом, в которую включена подсистема прогнозирования, использующая аналитические математические соотношения для расчета гринвичских угловых координат подспутниковой точки с учетом их изменений на текущий момент времени относительно координат подспутниковой точки в начальный момент времени и обеспечивающая подтверждение достоверности применимости аналитического способа на интервале времени прогнозирования движения космического аппарата Тпр.
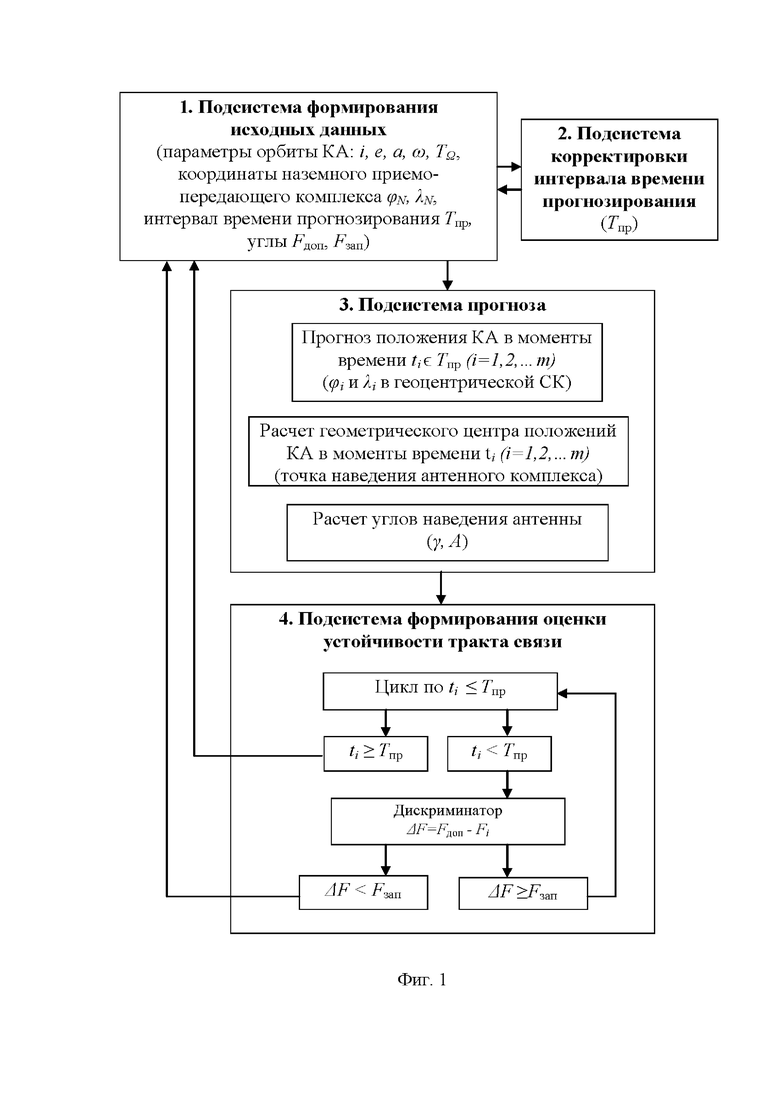
Предложенное изобретение поясняется блок-схемой моделирования управления антенным комплексом относительно геоцентрических координат подспутниковой точки, приведенной на фигуре 1.
Осуществление предлагаемого способа управления антенным комплексом основано на наведении антенного комплекса в геометрический центр положений космического аппарата в моменты времени ti (i=1.2,…m), заданные с постоянным шагом на определенном интервале времени прогнозирования движения космического аппарата Тпр, и аппроксимации суточной траектории подспутниковой точки известной фигурой Лиссажу и описанием ее системой уравнений периодического характера:
где A, B– амплитуды колебаний,  – частоты,
– частоты,  – сдвиг фаз.
– сдвиг фаз.
Суммарно учитываются следующие факторы.
1) Прецессия линии узлов орбиты:

где  – угловая скорость прецессии [рад/с],
– угловая скорость прецессии [рад/с],
 – экваториальный радиус Земли,
– экваториальный радиус Земли,
a – большая полуось орбиты космического аппарата,
e – эксцентриситет орбиты космического аппарата,
n – угловая скорость движения космического аппарата (2π радианов, делённые на период, выраженный в секундах),
i – наклонение [°],
J2 – второй динамический коэффициент формы (1,08262668⋅10-3 для Земли).
2) Изменение гринвичской долготы подспутниковой точки за время одного оборота космического аппарата вокруг Земли:
где  – угловая скорость вращения Земли вокруг своей оси [рад/с],
– угловая скорость вращения Земли вокруг своей оси [рад/с],
ΔT =TΩ – TЗС – отличие периода обращения космического аппарата от звездных суток TЗС,
TΩ – драконический период обращения.
3) Суточная траектория подспутниковой точки имеет замкнутый характер и определяется наклонением i, эксцентриситетом e и аргументом перигея ω орбиты.
Изменение долготы подспутниковой точки космического аппарата из-за влияния прецессии линии узлов Ωpсут [рад/cут] и вследствие отличия периода обращения от звездных суток Δλ [рад/cут] за период Δt [сутки] составит:

Суммарно с (4) гринвичские угловые координаты подспутниковой точки (долгота и широта) (X, Y) [°] с учетом их изменений за время Δt [сут] относительно координат подспутниковой точки (X0, Y0) [°] в начальный момент времени), определяются системами уравнений (формулы 5, 6, 7) на основе системы уравнений (1):
Случай I: i = 0 и e ≠ 0

Случай II: i ≠ 0 и e = 0

Случай III: i ≠ 0 и e ≠ 0

где i – наклонение [рад],
ω – аргумент перигея [рад],
Ωpсут – скорость прецессии линии узлов [рад/cут],
Δλ – скорость изменения гринвичской долготы подспутниковой точки космического аппарата вследствие отличия его периода обращения от звездных суток TЗС [рад/cут],
e – эксцентриситет орбиты космического аппарата.
Зная гринвичские угловые координаты подспутниковой точки в моменты времени ti (i=1,2,…m) на определенном интервале времени Тпр, можно определить угловые координаты геометрического центра. Теперь, зная высоту космического аппарата и угловые координаты наземного приемо-передающего комплекса (φN, λN) в геоцентрической системе координат, можно вычислить значения азимута A и угла места γ для любой точки размещения наземного приемо-передающего комплекса.
С точки зрения штатного функционирования антенного комплекса при тракте информации с космическим аппаратом имеется известная диаграмма направленности, через которую с учетом заданного уровня усиления определяется максимальный допустимый угол (Fдоп) между вектором текущего положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра.
Условие устойчивого тракта информации между антенным комплексом и космическим аппаратом на орбите, параметры которой незначительно отличны от геостационарной орбиты, определяется соотношением:

где i – наклонение орбиты,
e – эксцентриситет,
ω – аргумент перигея,
T – период обращения,
Fдоп, Fзап – предельно допустимое значение и запас по углу F.
Разница между предельно допустимым углом  и текущим углом F должна быть не меньше Fзап. При невыполнении условия (8) необходимо обновление начальных условий и перенацеливание антенного комплекса в геометрический центр с новыми координатами.
и текущим углом F должна быть не меньше Fзап. При невыполнении условия (8) необходимо обновление начальных условий и перенацеливание антенного комплекса в геометрический центр с новыми координатами.
Предусмотрено уточнение допустимого периода применимости аналитического способа без обновления начальных условий (корректировка интервала времени Тпр) с использованием точной модели численного интегрирования движения космического аппарата, учитывающей влияние возмущений вследствие нецентральности гравитационного поля Земли, притяжения Луны и Солнца, а также давления солнечного излучения.
Практическая реализация предложенной системы управления антенным комплексом приёма-передачи информации дистанционного зондирования Земли может быть описана следующим образом (фиг. 1).
Подсистема исходных данных 1 включает функциональные блоки (компьютерные компоненты), обеспечивающие получение начальных условий параметров движения космических аппаратов орбитальной группировки, координат наземного приемо-передающего комплекса, интервал времени прогнозирования Тпр движения космического аппарата, значений углов Fдоп и Fзап для реализации требуемого закона управления по углу F.
Подсистема 2 корректировки интервала времени прогнозирования Тпр, связанная с подсистемой исходных данных 1, предназначена для моделирования движения космического аппарата, включает функциональные блоки (компьютерные компоненты) интегрирования дифференциальных уравнений движения космического аппарата и формирования функций выхода и обеспечивает подтверждение достоверности применимости аналитического способа на интервале времени прогнозирования Тпр.
Подсистема прогнозирования 3 включает функциональные блоки (компьютерные компоненты), обеспечивающие:
- прогноз положения космического аппарата в дискретные моменты времени ti (φi и λi) в геоцентрической системе координат на интервале времени прогнозирования Тпр с использованием уравнений (4-7);
- расчет геометрического центра (точки наведения антенного комплекса на интервале времени прогнозирования);
- расчет углов наведения антенны (угла места γ и азимута А).
Подсистема 4 формирования оценки устойчивости тракта связи включает функциональные блоки (компьютерные компоненты), обеспечивающие:
- сравнение в цикле на интервале времени прогнозирования Тпр текущего значения измеряемого параметра Fi с опорным значением Fдоп;
- контролирует выполнение условия Fдоп – Fi≥ Fзап, то есть разница между допустимым и фактическим углами должна быть не меньше запаса Fзап.
- завершает цикл по времени или в случае невыполнения контролируемого условия и осуществляет переход в подсистему 1 для продолжения расчетов на следующем временном интервале с новыми начальными условиями.
Выбор времени перенацеливания и расчет углов наведения антенного комплекса обеспечивается компьютерным оборудованием системы управления, в которой автоматически определяются и отслеживаются изменения значений угловых параметров сопровождаемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора геостационарной области для наблюдения элементов космического мусора и других объектов с космического аппарата на полусуточной высокоэллиптической орбите | 2017 |
|
RU2659379C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| СИСТЕМА СПУТНИКОВ НА ЭЛЛИПТИЧЕСКИХ ОРБИТАХ, ЭМУЛИРУЮЩАЯ ХАРАКТЕРИСТИКИ СИСТЕМЫ СПУТНИКОВ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2002 |
|
RU2223205C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2542836C2 |
Группа изобретений относится к управлению наземным антенным комплексом (НАК) с ограниченной диаграммой направленности относительно угловых амплитуд колебаний подспутниковой точки космического аппарата (КА) на квазигеостационарной орбите (КГСО). Согласно способу, суточную траекторию подспутниковой точки КА аппроксимируют фигурой Лиссажу, исходя из которой вычисляют геометрический центр КА. Устойчивость тракта приема и передачи информации с КА обеспечивают условием нахождения фактического угла между вектором текущего положения КА относительно НАК и вектором геометрического центра КА в пределах диаграммы направленности НАК. Предлагаемая система управления определяет, в частности, достоверность применяемого аналитического метода на интервале прогнозирования движения КА. Техническим результатом является возможность управления НАК приема информации с КА на КГСО на основе аналитического метода прогнозирования орбиты этого КА исходя из вычисляемых координат его подспутниковой точки. 2 н.п. ф-лы, 1 ил.
1. Способ управления наземным антенным комплексом для обеспечения приема и передачи информации в тракте связи с космическим аппаратом на квазигеостационарной орбите, в котором управление антенным комплексом приема информации с космического аппарата на квазигеостационарной орбите осуществляют относительно координат подспутниковой точки в начальный момент времени в геоцентрической системе координат, характеризующийся тем, что суточную траекторию подспутниковой точки аппроксимируют фигурой Лиссажу и наведение антенного комплекса осуществляют в геометрический центр положений космического аппарата в моменты времени ti (i=1.2,…m), заданные с постоянным шагом на интервале времени прогнозирования движения космического аппарата Тпр, по условию устойчивости тракта связи между антенным комплексом и космическим аппаратом на квазигеостационарной орбите
Fдоп–Fi≥Fзап,
где Fi – фактический угол между вектором текущего положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра;
Fдоп – максимальный допустимый угол между вектором текущего положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра, определяемый диаграммой направленности антенны и коэффициентом усиления;
Fзап – запас по углу F между вектором положения космического аппарата относительно наземного приемо-передающего комплекса и вектором геометрического центра, определяющий закон управления по углу F.
2. Система управления для осуществления способа по п. 1, характеризующаяся тем, что включает в себя подсистему прогнозирования, использующую аналитические математические соотношения для расчета гринвичских угловых координат подспутниковой точки с учетом их изменений на текущий момент времени относительно координат подспутниковой точки в начальный момент времени и обеспечивающую подтверждение достоверности применимости аналитического способа на интервале времени прогнозирования движения космического аппарата Тпр.
| US 7744036 B2, 29.06.2010 | |||
| Расчет орбит | |||
| Курсовая работа | |||
| Авиация и космонавтика | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Синтезатор музыкальной фразы | 1980 |
|
SU894787A2 |
| КОМПАРАТОР НАПРЯЖЕНИЙ | 2010 |
|
RU2452082C2 |
| JP 2017122713 A, 13.07.2017 | |||
| US 10116893 B1, 30.10.2018 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ С ФАЗОВОЙ СЕЛЕКЦИЕЙ ПО ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2360265C1 |

