Изобретение относится к рудничному транспорту, в частности к подвесным монорельсовым дорогам на аккумуляторной тяге, и может быть использовано для подвижного состава шахтных подвесных монорельсовых дорог, предназначенных для транспортирования грузов и людей по подземным горным выработкам.
Известен подвижной состав типа DLZA90F шахтной подвесной монорельсовой дороги, содержащий установленные на связанном с крепью горной выработки монорельсе подвижные единицы в виде связанных между собой тяговых устройств, предназначенных для приведения в движение подвижных единиц по монорельсовой подвесной дороге в горизонтальной плоскости и на пути с углом наклона до ±30°, двух кабин оператора, аккумуляторной батареи, системы управления тяговым усилием подвижного состава, вспомогательного оборудования. Во время подвода энергии от аккумуляторной батареи к двигателям тяговых устройств возникает вращающий момент, который через редуктор передается приводным колесам, за счет чего происходит перемещение подвижного состава вдоль монорельса (Электронный каталог фирмы Ferrit «Monorail/подвесной транспорт. Локомотивы аккумуляторные. Подвесной локомотив аккумуляторный DLZA90F», дата обращения 07.07.2021 г., режим доступа: https://wvvw.ferrit.cz/ru/products/podvesnoj-transporiyiokom akkumulatornve/dlza90f, свободный. - Загл. с экрана. - Яз. рус).
В процессе перемещения подвижного состава по монорельсовой дороге регулирование тягового усилия осуществляется оператором вручную, вследствие чего при перемещении по знакопеременному профилю монорельсовой дороги работа тяговых устройств осуществляется с низким коэффициентом полезного действия и высокой потребляемой мощностью.
Наиболее близким аналогом предлагаемого изобретения является подвижной состав шахтной подвесной монорельсовой дороги, содержащий установленные на связанном с крепью горной выработки монорельсе подвижные единицы в виде связанных между собой четырех тяговых устройств с электрическим приводом, включающим два синхронных электродвигателя с постоянными магнитами, систему управления тяговым усилием, взаимосвязанную с микропроцессорной системой, и аккумуляторную батарею мощностью 160 кВт*ч с напряжением 265 В постоянного тока, образованную литий-полимерными элементами. Для зарядки аккумуляторная батарея подключается к стационарному источнику зарядки в виде преобразователя электрической энергии, расположенному вне монорельса, например, в зарядной станции околоствольного двора шахты (Pieczora Е. Rozwoj napedow dolowych kolejek podwieszonych / E. Pieczora, H. Suffher // Maszyny Gornicze. - 2017. - No. 3. от 30.09.2017 - P. 44-57. URL: http://komag.eu/images/maszvnvgorniczel/2017/MG%203-20174.pdf).
Система управления тяговым усилием подвижного состава GAD-1 основана на использовании микропроцессорной системы цифровой связи и позволяет учитывать ограниченное количество параметров и режимов работы, например, электрические параметры аккумуляторной батареи и электрического привода и некоторые механические параметры единиц подвижного состава. Движение подвижного состава по знакопеременному профилю шахтной монорельсовой дороги с неровностями, а также с зазорами в сцепках, характеризуется низким коэффициентом полезного действия тяговых устройств и высокой потребляемой мощностью, поскольку используемых параметров недостаточно для оперативной оценки оптимальных режимов работы.
В известном устройстве система управления тяговым усилием подвижного состава не позволяет автоматически оценивать угол наклона и массу брутто подвижного состава, которые, в свою очередь, оказывают непосредственное влияние на скорость движения, динамические нагрузки, режимы работы тяговых устройств, нерациональное использование потребляемой мощности, что сказывается на высоких эксплуатационных расходах и неэффективном использовании энергии.
В основу изобретения поставлена задача усовершенствования подвижного состава шахтной подвесной монорельсовой дороги, в котором за счет новых конструктивных особенностей обеспечивается возможность оптимизации процесса управления тяговым усилием за счет оперативной оценки угла наклона и массы брутто подвижного состава в процессе его движения по знакопеременному профилю шахтной монорельсовой дороги значительной протяженности и разветвленное™, что приводит к повышению коэффициента полезного действия тяговых устройств при снижении потребляемой мощности.
Поставленная задача решается тем, что в подвижном составе шахтной подвесной монорельсовой дороги, содержащем установленные на связанном с крепью горной выработки монорельсе подвижные единицы в виде связанных между собой тяговых устройств с электрическим приводом и нетяговых устройств, аккумуляторную батарею, подключаемую к источнику зарядки, и систему управления тяговым усилием, взаимосвязанную с микропроцессорной системой управления, согласно изобретению система управления тяговым усилием содержит расположенные на каждом тяговом устройстве блок оценки угла наклона подвижного состава, содержащий взаимосвязанные инклинометр и акселерометр, и блок контроля массы брутто подвижного состава, содержащий взаимосвязанные тензометрический датчик и акселерометр, при этом источник зарядки аккумуляторной батареи выполнен в виде подключенного к аккумуляторной батарее подвижного автономного модуля зарядки, расположенного на нетяговом устройстве, и взаимосвязанного с микропроцессорной системой управления.
Целесообразно выполнение подвижного автономного модуля зарядки в виде дизель-генератора с управляемой выпрямительной установкой во взрывозащищенном рудничном исполнении.
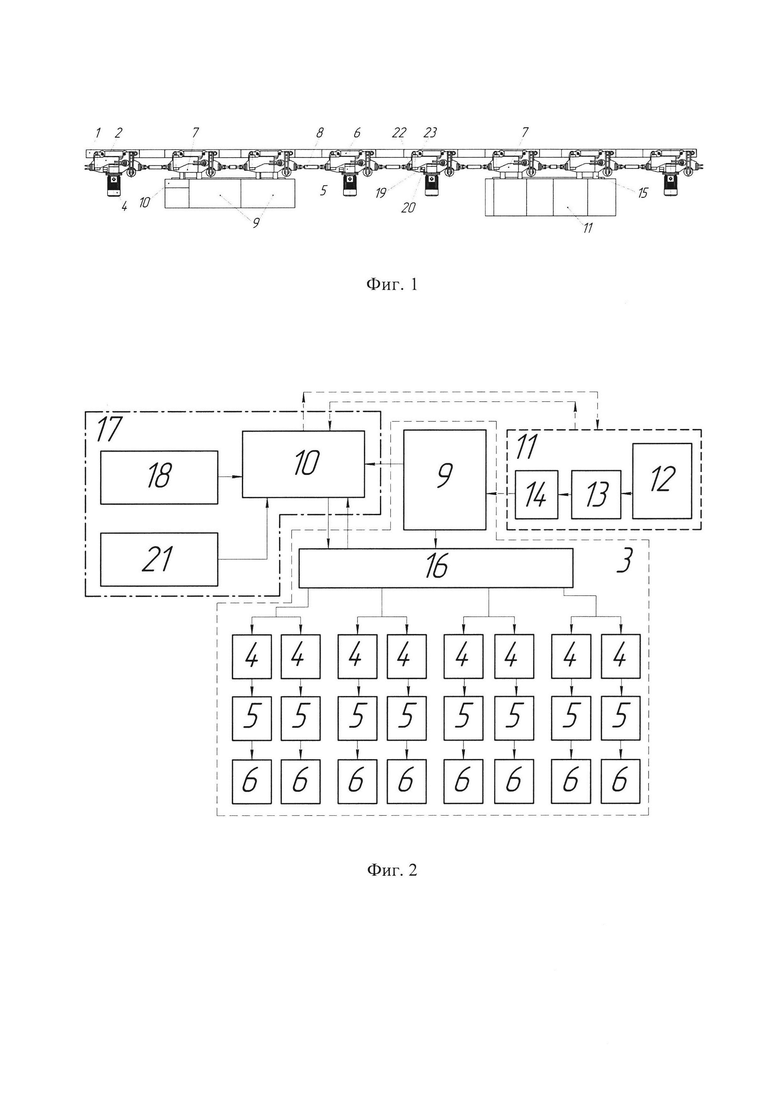
Сущность изобретения поясняется рисунками, где на фиг. 1 схематично изображен подвижной состав шахтной подвесной монорельсовой дороги; на фиг. 2 - блок-схема управления тяговым усилием подвижного состава шахтной подвесной монорельсовой дороги с подключенным автономным модулем зарядки аккумуляторной батареи.
Подвижной состав шахтной подвесной монорельсовой дороги содержит связанный с крепью горной выработки монорельс 1, состоящий из отрезков двутавровых балок, на нижних полках которых установлены в качестве подвижных тяговых единиц четыре тяговых устройства 2. Каждое тяговое устройство 2 имеет тяговый электрический привод 3 (ТЭП), который состоит из двух тяговых электродвигателей 4 (ТЭ) переменного тока и двух механических тяговых редукторов 5 для передачи и преобразования вращающего момента с вала ротора тягового электродвигателя через механический тяговый редуктор 5 на приводные колеса 6, которые развивают тяговое усилие и перемещают подвижной состав по монорельсу.
В качестве подвижных нетяговых единиц на монорельсе 1 установлены четыре транспортные тележки 7, предназначенные для удерживания на нем оборудования подвижного состава или вагонеток для транспортирования вспомогательных грузов и людей. Тяговые устройства 2 и транспортные тележки 7 связаны между собой с помощью шарнирных сцепок-тяг 8.
Подвижной состав содержит размещенные в смонтированном отсеке одной пары транспортных тележек 7 аккумуляторную батарею 9 (АБ) и взаимосвязанную с ней микропроцессорную систему 10 управления (МСУ), выполненную на базе микроЭВМ. АБ 9 кислотная, щелочная или литий-ионная взрывозащищенного исполнения подключена к подвижному автономному модулю 11 зарядки аккумуляторной батареи (АМЗАБ) посредством силовых кабелей и взрывозащищенных разъемов. АМЗАБ 11 выполнен в виде дизель-генератора во взрывозащищенном рудничном исполнении, представляющего собой конструктивно объединенные дизельный двигатель 12 внутреннего сгорания с системой нейтрализации и охлаждения отработавших газов, синхронный генератор 13 переменного тока и предназначенную для выпрямления переменного напряжения синхронного генератора и управления процессом зарядки управляемую выпрямительную установку 14 (УВУ). АМЗАБ 11 закреплен на раме 15, подвешенной на монорельсе 1 посредством другой пары транспортных тележек 7. АМЗАБ может быть использован также для подключения и питания тягового электропривода.
ТЭП 3 содержит подключенный к АБ 9 блок 16 включения-отключения тяговых электродвигателей (БВОТЭ), взаимосвязанный с МСУ 10. БВОТЭ 16 выполнен на элементной базе тиристорных или транзисторных IGBT ключей.
Подвижной состав содержит систему 17 управления тяговым усилием подвижного состава (СУТУПС), которая взаимосвязана с МСУ 10 и содержит блок 18 оценки угла наклона подвижного состава (БОУНПС), содержащий установленные на каждом тяговом устройстве 2 взаимосвязанные инклинометр 19 и акселерометр 20, позволяющие формировать информацию об углах наклона подвижного состава. СУТУПС 17 также содержит блок 21 контроля массы брутто подвижного состава (БКМБПС), содержащий установленные на каждом тяговом устройстве 2 взаимосвязанные тензометрический датчик 22 и акселерометр 23, связанные со сцепками-тягами 8, передающими тяговое усилие. БКМБПС 21 предназначен для контроля массы брутто и выработки сигналов, пропорциональных загрузке транспортных тележек 7 с последующей их передачей по каналам связи, например, проводной или оптико-волоконной, в МСУ 10.
Устройство работает следующим образом.
В процессе движения подвижного состава шахтной подвесной монорельсовой дороги по монорельсу 1, в зависимости от угла наклона и массы брутто подвижного состава МСУ 10 выполняется оценка необходимого тягового усилия, развиваемого тяговыми электродвигателями 4 тягового электрического привода 3, и формируются управляющие воздействия, которые подаются в БВОТЭ 16. Тяговое усилие, развиваемое ТЭ 4, передается на механический тяговый редуктор 5, которым преобразуется вращающий момент и частота вращения вала ротора ТЭ 4 и осуществляется его передача на приводные колеса 6, которые в свою очередь осуществляют перемещение подвижного состава шахтной подвесной монорельсовой дроги вдоль монорельса 1.
При углах наклона 0-5° и порожнем составе в БКМБПС 21 формируется сигнал об отсутствии загрузки состава (0% от максимальной массы брутто). МСУ 10 подается сигнал в БВОТЭ 16 об отключении до 50% ТЭ 4, что несущественно сказывается на тягово-сцепных свойствах подвижного состава, но значительно повышает коэффициент полезного действия тяговых устройств. В случае изменения профиля шахтной монорельсовой дороги, например, для преодоления подъема до +30° и необходимости увеличения тягового усилия тяговыми устройствами 2, МСУ 10 подается команда в БВОТЭ 16 на включение ТЭ 4. В процессе движения подвижного состава по знакопеременному профилю шахтной подвесной монорельсовой дороги, СУТУПС 17 осуществляется работа тяговых электродвигателей по следующим схемам:
- профиль пути - подъем от 0° до 5°, порожний состав, отключение до 50% тяговых электродвигателей;
- профиль пути - подъем от 5° до 15°, порожний состав, отключение 25-50% тяговых электродвигателей;
- профиль пути - подъем от 15° до 30°, порожний состав, отключение 0-25% тяговых электродвигателей;
- профиль пути - спуск от 5° до 30°, порожний или груженый состав, отключение 50-100% тяговых электродвигателей;
- профиль пути - площадка 0°, порожний или груженый состав, отключение 25-75% тяговых электродвигателей;
- профиль пути - подъем от 0° до 5°, груженый состав, отключение 25-50% тяговых электродвигателей;
- профиль пути - подъем от 5° до 15°, груженый состав, отключение 0-50% тяговых электродвигателей;
- профиль пути - подъем от 15° до 30°, груженый состав, отключение 0-25% тяговых электродвигателей.
БКМБПС 21 с помощью тензометрических датчиков 22 и акселерометров 23, связанных со сцепками-тягами 8, определяется загруженность транспортных тележек 7 и формируется выходной сигнал о состоянии загрузки состава. Сформированный сигнал поступает в МСУ 10, где вычислительным модулем формируются управляющие воздействия и сигналы ограничения, которые передаются в БВОТЭ 16. При движении подвижного состава по знакопеременному профилю ±30° в БОУНПС 18 с помощью инклинометра 19 и акселерометра 20 формируются сигналы об углах наклона подвижного состава и соответственно монорельса 1, которые передаются в МСУ 10, где вычислительным модулем по заложенному алгоритму включения-отключения ТЭ 4 формируется управляющее воздействие в БВОТЭ 16, который, в свою очередь, в зависимости от угла наклона подвижного состава и профиля пути производит отключение или включение группы ТЭ 4.
При следующем изменении угла наклона подвижного состава в зависимости от профиля пути БОУНПС 18 подается сигнал в МСУ 10 об изменении угла наклона, где вычислительным модулем обрабатывается сигнал и дается команда в БВОТЭ 16 на дальнейшие включения-отключения ТЭ 4, которые осуществляются попарно в зависимости от общего числа двигателей. При соотношении отключенных и включенных ТЭ 4, два и шесть соответственно, при их общем количестве восемь единиц, достигается снижение потребляемой мощности на 25%, при других схемах отключения и включения ТЭ 4, процентное соотношение отбираемой мощности изменяется в зависимости от количества отключенных ТЭ.
В случае необходимости зарядки АБ 9 посредством подключенных силовыми кабелями к закрепленному на раме 15 АМЗАБ 11, дизельным двигателем 12 внутреннего сгорания приводится во вращение ротор синхронного генератора 13 переменного тока. Снимаемое напряжение с синхронного генератора 13 подается на УВУ 14, после чего выпрямленное и отрегулированное напряжение подается на АБ 9. При этом режимы зарядки АБ 9 устанавливаются МСУ 10, которая контролирует напряжение и зарядный ток АБ 9.
Таким образом, при эксплуатации заявляемого подвижного состава в условиях шахтных монорельсовых дорог значительной протяженности и разветвленности со знакопеременным профилем пути обеспечивается снижение потребляемой мощности от аккумуляторной батареи до 50%. При этом обеспечивается повышение эксплуатационного КПД тяговых устройств в зависимости от режимов работы и загрузки подвижного состава шахтной монорельсовой дороги на 6-8%. Кроме того, исключение необоснованного разгона и торможения подвижного состава за счет оптимизации процесса управления тяговым усилием в процессе его движения приводит к снижению динамических нагрузок, уменьшению воздействия инерционных и силовых возмущений на подвеску монорельса и крепь, что позволяет продлить срок эксплуатации шахтной подвесной монорельсовой дороги горной выработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для индивидуального перемещения людей и грузов в подземных горных выработках по подвесной монорельсовой дороге | 2024 |
|
RU2836283C1 |
| Зарядно-разрядное устройство аккумуляторных батарей | 2022 |
|
RU2783009C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2000 |
|
RU2233379C2 |
| Тормозное устройство монорельсовой дороги | 1981 |
|
SU968481A1 |
| Способ замены внутришахтной базовой станции | 2018 |
|
RU2681787C1 |
| Шахтная монорельсовая дорога | 2020 |
|
RU2748829C1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| УСТАНОВКА МОНТАЖНАЯ ПНЕВМАТИЧЕСКАЯ САМОХОДНАЯ (УМПС) | 2006 |
|
RU2327000C2 |
| ШАХТНАЯ МОНОРЕЛЬСОВАЯ ДОРОГА | 2015 |
|
RU2611660C1 |
| Подвесная монорельсовая дорога (ее варианты) | 1982 |
|
SU1104303A1 |
Изобретение относится к рудничному транспорту, в частности к подвесным монорельсовым дорогам на аккумуляторной тяге, и может быть использовано для подвижного состава шахтных подвесных монорельсовых дорог, предназначенных для транспортирования грузов и людей по подземным горным выработкам. Подвижной состав шахтной подвесной монорельсовой дороги содержит установленные на связанном с крепью горной выработки монорельсе подвижные единицы в виде связанных между собой тяговых устройств с электрическим приводом и нетяговых устройств, аккумуляторную батарею, подключаемую к источнику зарядки, и систему управления тяговым усилием, взаимосвязанную с микропроцессорной системой управления. При этом система управления тяговым усилием содержит расположенные на каждом тяговом устройстве блок оценки угла наклона подвижного состава, содержащий взаимосвязанные инклинометр и акселерометр, и блок контроля массы брутто подвижного состава, содержащий взаимосвязанные тензометрический датчик и акселерометр, связанные со сцепками-тягами, передающими тяговое усилие. При этом источник зарядки аккумуляторной батареи выполнен в виде подключенного к аккумуляторной батарее подвижного автономного модуля зарядки, расположенного на нетяговом устройстве и взаимосвязанного с микропроцессорной системой управления. Изобретение позволяет оптимизировать процесс управления тяговым усилием за счет оперативной оценки угла наклона и массы брутто подвижного состава в процессе его движения по знакопеременному профилю шахтной монорельсовой дороги значительной протяженности и разветвленности, что приводит к повышению коэффициента полезного действия тяговых устройств при снижении потребляемой мощности. 1 з.п. ф-лы, 2 ил.
1. Подвижной состав шахтной подвесной монорельсовой дороги, содержащий установленные на связанном с крепью горной выработки монорельсе подвижные единицы в виде связанных между собой тяговых устройств с электрическим приводом и нетяговых устройств, аккумуляторную батарею, подключаемую к источнику зарядки, и систему управления тяговым усилием, взаимосвязанную с микропроцессорной системой управления, отличающийся тем, что система управления тяговым усилием содержит расположенные на каждом тяговом устройстве блок оценки угла наклона подвижного состава, содержащий взаимосвязанные инклинометр и акселерометр, и блок контроля массы брутто подвижного состава, содержащий взаимосвязанные тензометрический датчик и акселерометр, связанные со сцепками-тягами, передающими тяговое усилие, при этом источник зарядки аккумуляторной батареи выполнен в виде подключенного к аккумуляторной батарее подвижного автономного модуля зарядки, расположенного на нетяговом устройстве и взаимосвязанного с микропроцессорной системой управления.
2. Подвижной состав шахтной подвесной монорельсовой дороги по п. 1, отличающийся тем, что подвижной автономный модуль зарядки выполнен в виде дизель-генератора с управляемой выпрямительной установкой во взрывозащищенном рудничном исполнении.
| ТЯГОВОЕ УСТРОЙСТВО ДЛЯ ПОДВЕСНЫХ МОНОРЕЛЬСОВЫХ ДОРОГ СО ЗНАЧИТЕЛЬНЫМИ УГЛАМИ НАКЛОНА | 1967 |
|
SU222437A1 |
| РАЗБРАСЫВАТЕЛЬ ПОДСТИЛКИ | 0 |
|
SU183531A1 |
| Шахтная монорельсовая дорога | 2020 |
|
RU2748829C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ ТРАНСПОРТНОГО РОБОТА ПОДВЕСНОЙ МОНОРЕЛЬСОВОЙ ДОРОГИ | 1992 |
|
RU2032607C1 |
| ШАХТНАЯ МОНОРЕЛЬСОВАЯ ДОРОГА | 2015 |
|
RU2611660C1 |
| Способ формирования результатов измерений на основании сигналов датчиков | 2014 |
|
RU2643746C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2748730C1 |
| Клещи для сварочных точечных машин | 1986 |
|
SU1375421A1 |

