ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к испытательному устройству, способу настройки испытательного процесса, и способу испытания рулевого механизма.
УРОВЕНЬ ТЕХНИКИ
[0002] Например, как описано в Патентном документе 1 (японская предварительная патентная публикация № 2015-219115), известно испытательное устройство, которое испытывает надежность (долговечность) и т.п. рулевого механизма транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В испытании на надежность рулевого механизма, вал рулевого механизма повторно приводят во взаимно обратные вращательные движения с заданной угловой скоростью в пределах всего диапазона движения. Когда вал рулевого механизма достигает конца (положения концевого упирания) диапазона движения рулевого механизма при приведении в движение с заданной угловой скоростью, конец зубчатой рейки может сильно столкнуться с картером редуктора и т.п., и нагрузка, значительно превышающая допустимое значение, может быть мгновенно приложена к образцу. Когда такая избыточная нагрузка прикладывается к образцу, достоверность результата испытания ухудшается.
[0004] Первый, четвертый и пятый аспекты настоящего изобретения были обеспечены ввиду описанных выше обстоятельств, и задачей настоящего изобретения является обеспечение испытательного устройства, которое позволяет обеспечить более подходящее оценивание образца посредством приведения в движение вала рулевого механизма таким образом, чтобы крутящий момент, превышающий допустимое значение, не прикладывался к образцу, когда образец достигает положения концевого упирания.
[0005] Дополнительно, при испытании рулевого механизма необходимо точно управлять нагрузкой, прикладываемой к поперечной рулевой тяге. Однако, поскольку конструкции испытательного устройства и рулевого механизма в качестве образца являются сложными, и, в частности, жесткость образца относительно низка, изменять нагрузку (обеспечивать ее реакцию) относительно управляемой переменной двигателя, который прикладывает эту нагрузку, становится крайне сложно. Таким образом, ошибка (отклонение) между целевым значением и измеренным значением управляемой переменной двигателя становится относительно большой и, таким образом, становится трудно управлять нагрузкой с достаточно высокой точностью даже при осуществлении управления с нормальной обратной связью.
[0006] Второй аспект настоящего изобретения был обеспечен ввиду описанных выше обстоятельств, и задачей настоящего изобретения является обеспечение испытательного устройства, которое позволяет более точно управлять нагрузкой, прикладываемой к рулевому механизму, посредством чего обеспечивается более подходящее оценивание образца.
[0007] Дополнительно, в общепринятом испытании рулевого механизма, нагрузку прикладывают к поперечной рулевой тяге механическим устройством, в котором используется винтовая пружина, пластинчатая пружина, и т.п. Таким образом, трудно настроить нагрузку на произвольное значение. Дополнительно, в общепринятом способе, в котором нагрузку прикладывают механически, невозможно приложить сложную нагрузку, которая действует на поперечную рулевую тягу в реальном транспортном средстве и изменяется в зависимости от угла рулевого механизма и направления вращения.
[0008] Третий аспект настоящего изобретения был обеспечен ввиду описанных выше обстоятельств, и задачей настоящего изобретения является обеспечение испытательного устройства, которое увеличивает степень свободы нагрузки, подлежащей приложению к рулевому механизму, прикладывает нагрузку, более близкую к нагрузке, прикладываемой к рулевому механизму, установленному на реальное транспортное средство, и позволяет обеспечить более подходящее оценивание образца.
[0009] Дополнительно, при испытании рулевого механизма существовала проблема, состоявшая в том, что условия испытания становились сложными, и становились сложными работы по настройке условий испытания.
[0010] Шестой аспект настоящего изобретения был обеспечен ввиду описанных выше обстоятельств, и задачей настоящего изобретения является упрощение настройки условий испытания.
[0011] Дополнительно, при испытании рулевого механизма, способ установки образца в испытательное устройство отличается в зависимости от типа образца, но существовала проблема, состоявшая в том, что если образец был установлен неправильно, то избыточная нагрузка прикладывалась к образцу, и образец мог быть поврежден.
[0012] Седьмой аспект настоящего изобретения был обеспечен ввиду описанных выше обстоятельств, и задачей настоящего изобретения является постепенное увеличение нагрузки, подлежащей приложению к образцу, до настроенного значения таким образом, чтобы испытание могло быть остановлено до приложения избыточной нагрузки к образцу, посредством чего предотвращается разрушение образца вследствие неправильной установки образца.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ
[0013] Согласно первому аспекту настоящего изобретения, обеспечено испытательное устройство, включающее в себя приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма, обеспеченного в качестве образца, управляющую часть, выполненную с возможностью управлять приводной частью входной стороны, и средство обнаружения положения, выполненное с возможностью обнаруживать угловое положение вала рулевого механизма, причем управляющая часть выполнена с возможностью управлять приводной частью входной стороны для ограничения максимального значения крутящего момента вала рулевого механизма, когда угловое положение вала рулевого механизма достигает положения концевого упирания, являющегося концом диапазона движения вала рулевого механизма.
[0014] В описанном выше испытательном устройстве, управляющая часть может быть выполнена с возможностью управлять приведением в движение вала рулевого механизма посредством процесса управления положением, в котором угловое положение вала рулевого механизма используется в качестве управляемой переменной, и процесса управления крутящим моментом, в котором крутящий момент вала рулевого механизма используется в качестве управляемой переменной, и может выполнять процесс управления положением, когда угловое положение вала рулевого механизма находится за пределами первого углового диапазона, включающего в себя положение концевого упирания, и может переключать приведение в движение вала рулевого механизма с процесса управления положением на процесс управления крутящим моментом, когда угловое положение вала рулевого механизма достигает пределов первого углового диапазона.
[0015] В описанном выше испытательном устройстве, в процессе управления крутящим моментом, вращение вала рулевого механизма может управляться таким образом, чтобы угловая скорость вала рулевого механизма не превышала заданное максимальное значение.
[0016] В описанном выше испытательном устройстве, первый целевой крутящий момент может быть настроен на целевое значение крутящего момента, когда приведение в движение вала рулевого механизма переключается с процесса управления положением на процесс управления крутящим моментом, и приведение в движение вала рулевого механизма может быть переключено с процесса управления крутящим моментом на процесс управления положением, когда истекает заданный интервал времени после достижения крутящим моментом первого целевого крутящего момента.
[0017] В описанном выше испытательном устройстве, первый целевой крутящий момент может быть настроен на целевое значение крутящего момента, когда приведение в движение вала рулевого механизма переключается с процесса управления положением на процесс управления крутящим моментом, целевое значение крутящего момента может быть изменено на второй целевой крутящий момент, отличный от первого целевого крутящего момента, когда крутящий момент достигает первого целевого крутящего момента, и приведение в движение вала рулевого механизма может быть переключено с процесса управления крутящим моментом на процесс управления положением, когда истекает заданный интервал времени после достижения крутящим моментом второго целевого крутящего момента.
[0018] В описанном выше испытательном устройстве, приводная часть входной стороны может управляться таким образом, чтобы крутящий момент изменялся с заданной скоростью с момента, когда крутящий момент достигает первого целевого крутящего момента, до момента, когда крутящий момент достигает второго целевого крутящего момента.
[0019] В описанном выше испытательном устройстве, приводная часть входной стороны может включать в себя средство обнаружения положения, выполненное с возможностью обнаруживать угловое положение вала рулевого механизма, и средство обнаружения крутящего момента, выполненное с возможностью обнаруживать крутящий момент вала рулевого механизма.
[0020] Описанное выше испытательное устройство может включать в себя приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма, обеспеченного в качестве образца, и средство обнаружения нагрузки, выполненное с возможностью обнаруживать нагрузку, и приводная часть выходной стороны может включать в себя первый двигатель, который генерирует нагрузку.
[0021] Согласно второму аспекту настоящего изобретения обеспечено испытательное устройство, включающее в себя приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма, обеспеченного в качестве образца, средство обнаружения нагрузки, выполненное с возможностью обнаруживать нагрузку, и управляющую часть, выполненную с возможностью управлять приводной частью выходной стороны, причем приводная часть выходной стороны включает в себя первый двигатель, выполненный с возможностью генерировать нагрузку, причем управляющая часть включает в себя средство вычисления целевого значения, выполненное с возможностью вычислять целевое значение управляемой переменной первого двигателя на основе целевого значения нагрузки, и причем средство вычисления целевого значения вычисляет целевое значение управляемой переменной первого двигателя на основе измеренного значения управляемой переменной первого двигателя при повторном приложении нагрузки, имеющей одну и ту же форму волны, к поперечной рулевой тяге.
[0022] В описанном выше испытательном устройстве, управляющая часть может включать в себя средство генерирования обучающих данных, выполненное с возможностью генерировать обучающие данные на основе измеренного значения управляемой переменной первого двигателя, и средство вычисления целевого значения может вычислять целевое значение на основе обучающих данных.
[0023] В описанном выше испытательном устройстве, средство вычисления целевого значения может включать в себя средство вычисления отклонения, выполненное с возможностью вычислять отклонение нагрузки от целевого значения и измеренного значения нагрузки, средство вычисления корректирующего значения, выполненное с возможностью вычислять корректирующее значение управляемой переменной первого двигателя на основании отклонения нагрузки, и корректирующее средство, выполненное с возможностью выдавать значение, получаемое сложением корректирующего значения со значением из обучающих данных, в качестве целевого значения управляемой переменной первого двигателя.
[0024] В описанном выше испытательном устройстве, средство вычисления корректирующего значения может вычислять, в качестве корректирующего значения, значение, получаемое умножением отклонения нагрузки на коэффициент преобразования, для преобразования нагрузки в управляемую переменную первого двигателя.
[0025] В описанном выше испытательном устройстве, средство генерирования обучающих данных может генерировать, в качестве обучающих данных, среднее значение множества измеренных значений управляемой переменной первого двигателя.
[0026] В описанном выше испытательном устройстве, управляющая часть может повторно выполнять цикл управления, состоящий из множества точек управления, и обучающие данные могут быть средним значением измеренных значений управляемой переменной для заданного множества точек управления.
[0027] В описанном выше испытательном устройстве, заданное множество точек управления может включать в себя соответствующую точку управления, соответствующую целевой точке управления, являющейся целью управления в это время, и соседние точки управления, находящиеся вблизи соответствующей точки управления.
[0028] В описанном выше испытательном устройстве, соответствующая точка управления может быть той же точкой управления, что и целевая точка управления.
[0029] В описанном выше испытательном устройстве, разность фаз между целевой точкой управления и соответствующей точкой управления может быть настраиваемой.
[0030] В описанном выше испытательном устройстве, когда управляющая часть повторно выполняет цикл управления, состоящий из множества точек управления, обучающие данные могут быть получены усреднением измеренных значений управляемой переменной для множества последних циклов управления.
[0031] В описанном выше испытательном устройстве, обучающие данные могут быть сгенерированы для каждой из точек управления.
[0032] В описанном выше испытательном устройстве, средство вычисления целевого значения может вычислять целевое значение управляемой переменной первого двигателя с использованием в качестве обучающих данных преобразованной управляемой переменной, получаемой преобразованием угловой скорости вала рулевого механизма образца в угловую скорость первого двигателя, когда число полученных измеренных значений управляемой переменной первого двигателя меньше заданного числа.
[0033] В описанном выше испытательном устройстве, управляемая переменная первого двигателя может быть угловой скоростью.
[0034] В описанном выше испытательном устройстве, управляемая переменная первого двигателя может быть крутящим моментом вала.
[0035] В описанном выше испытательном устройстве, первый двигатель может быть одним из серводвигателя, двигателя с прямым приводом и линейного двигателя.
[0036] В описанном выше испытательном устройстве, приводная часть выходной стороны может включать в себя кодер поворота, выполненный с возможностью обнаруживать по меньшей мере одно из углового положения и угловой скорости первого двигателя.
[0037] Описанное выше испытательное устройство может включать в себя приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма образца под управлением управляющей части, и приводная часть входной стороны может включать в себя средство обнаружения положения, выполненное с возможностью обнаруживать угловое положение вала рулевого механизма.
[0038] В описанном выше испытательном устройстве, приводная часть входной стороны может включать в себя средство обнаружения крутящего момента, выполненное с возможностью обнаруживать крутящий момент вала рулевого механизма, и управляющая часть может быть выполнена с возможностью выполнять процесс центрирования для обнаружения центрального положения θС диапазона движения образца, причем процесс центрирования включает в себя этап однонаправленного приведения в движение, на котором приводят во вращательное движение вал рулевого механизма в одном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения, первый этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θА вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе однонаправленного приведения в движение, этап приведения в движение в обратном направлении, на котором приводят во вращательное движение вал рулевого механизма в обратном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения, второй этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θВ вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе приведения в движение в обратном направлении, и этап вычисления центрального положения, на котором вычисляют центральное положение θС диапазона движения вала рулевого механизма посредством следующего уравнения (1).
[0039] Согласно третьему аспекту настоящего изобретения, обеспечено испытательное устройство, включающее в себя приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма, обеспеченного в качестве образца, средство обнаружения положения, выполненное с возможностью обнаруживать угловое положение вала рулевого механизма образца, и управляющую часть, выполненную с возможностью управлять приводной частью выходной стороны, причем управляющая часть управляет приводной частью выходной стороны для приложения нагрузки согласно угловому положению.
[0040] В описанном выше испытательном устройстве, управляющая часть может управлять приводной частью выходной стороны таким образом, чтобы нагрузка монотонно увеличивалась или уменьшалась относительно углового положения.
[0041] В описанном выше испытательном устройстве, управляющая часть может управлять приводной частью выходной стороны таким образом, чтобы скорость изменения нагрузки относительно углового положения была постоянной.
[0042] В описанном выше испытательном устройстве, управляющая часть может управлять приводной частью выходной стороны таким образом, чтобы соотношение между угловым положением и нагрузкой переключалось согласно направлению вращения вала рулевого механизма.
[0043] В описанном выше испытательном устройстве, приводная часть выходной стороны может прикладывать нагрузку в направлении, противоположном направлению движения поперечной рулевой тяги.
[0044] В описанном выше испытательном устройстве, в случае, когда приводная часть выходной стороны соединена с поперечной рулевой тягой на одной стороне образца в направлении влево-вправо, управляющая часть может управлять приводной частью выходной стороны таким образом, чтобы скорость изменения нагрузки относительно угла поворота вала рулевого механизма, когда направление вращения вала рулевого механизма является направлением рулевого управления в одну сторону, была больше скорости изменения нагрузки относительно угла поворота вала рулевого механизма, когда направление вращения вала рулевого механизма является направлением рулевого управления в другую сторону в направлении влево-вправо.
[0045] Описанное выше испытательное устройство может включать в себя средство обнаружения крутящего момента, выполненное с возможностью обнаруживать крутящий момент вала рулевого механизма, и средство обнаружения направления вращения, выполненное с возможностью обнаруживать направление вращения вала рулевого механизма, и управляющая часть может управлять приводной частью выходной стороны таким образом, чтобы никакая нагрузка не прикладывалась к поперечной рулевой тяге, когда направление крутящего момента и направление вращения вала рулевого механизма не совпадают.
[0046] В описанном выше испытательном устройстве, управляющая часть может включать в себя средство приема настроенного значения крутящего момента, выполненное с возможностью принимать входные данные о максимальном значении крутящего момента, являющемся настроенным значением максимального значения допустимого диапазона крутящего момента, и первый индекс, представляющий настроенное значение крутящего момента, отличное от максимального значения крутящего момента, и средство вычисления настроенного значения крутящего момента, выполненное с возможностью вычислять настроенное значение крутящего момента на основе максимального значения крутящего момента и первого индекса, принимаемых средством приема настроенного значения крутящего момента.
[0047] В описанном выше испытательном устройстве, первый индекс может быть отношением настроенного значения крутящего момента к максимальному значению крутящего момента, и средство вычисления настроенного значения крутящего момента может вычислять значение, получаемое умножением максимального значения крутящего момента на первый индекс, в качестве настроенного значения крутящего момента.
[0048] Описанное выше испытательное устройство может включать в себя второй двигатель, выполненный с возможностью приводить в движение вал рулевого механизма, и управляющая часть может включать в себя средство вычисления командного значения, выполненное с возможностью вычислять командное значение для второго двигателя на основе настроенного значения крутящего момента.
[0049] В описанном выше испытательном устройстве, управляющая часть может быть выполнена с возможностью выполнять процесс центрирования, причем процесс центрирования включает в себя этап однонаправленного приведения в движение, на котором приводят во вращательное движение вал рулевого механизма в одном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения, первый этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θА вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе однонаправленного приведения в движение, этап приведения в движение в обратном направлении, на котором приводят во вращательное движение вал рулевого механизма в обратном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения, второй этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θВ вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе приведения в движение в обратном направлении, и этап вычисления центрального положения, на котором вычисляют центральное положение θС диапазона движения вала рулевого механизма посредством следующего уравнения (1).
[0050] В описанном выше испытательном устройстве, процесс центрирования может включать в себя этап перемещения в центральное положение, на котором продвигают вращательным движением вал рулевого механизма в центральное положение θС.
[0051] В описанном выше испытательном устройстве, приводная часть выходной стороны может включать в себя подвижное основание, выполненное с возможностью приводиться во вращательное движение относительно оси вращения, ортогональной направлению движения поперечной рулевой тяги, и соединительная конструкция, к которой может быть прикреплен конец поперечной рулевой тяги, может быть обеспечена в некотором положении на подвижном основании на расстоянии от оси вращения.
[0052] В описанном выше испытательном устройстве, подвижное основание может включать в себя пару рычагов, продолжающихся в направлении вперед-назад по существу ортогонально оси вращения и образованных симметрично относительно плоскости, включающей в себя ось вращения, и поперечная рулевая тяга может быть прикреплена к одному из пары рычагов.
[0053] В описанном выше испытательном устройстве, управляющая часть может быть выполнена с возможностью выполнять процесс проверки полярности, причем процесс проверки полярности включает в себя этап приема входных данных, на котором принимают входные данные, указывающие на то, является ли образец по своему типу передним рулевым устройством или задним рулевым устройством, первый этап обнаружения положения выходной стороны, на котором обнаруживают угловое положение подвижного основания, этап приведения в движение, на котором приводят во вращательное движение вал рулевого механизма в заданном направлении вращения на заданный угол поворота, второй этап обнаружения положения выходной стороны, на котором обнаруживают угловое положение подвижного основания после этапа приведения в движение, этап определения направления вращения, на котором определяют направление вращения подвижного основания на этапе приведения в движение на основе результатов обнаружения первого этапа обнаружения положения выходной стороны и второго этапа обнаружения положения выходной стороны, и этап определения полярности, на котором определяют, соответствует ли соотношение между направлением вращения вала рулевого механизма и направлением вращения подвижного основания типу образца.
[0054] В описанном выше испытательном устройстве, процесс проверки полярности может включать в себя этап уменьшения максимального значения крутящего момента, на котором уменьшают максимальное значение крутящего момента, являющееся настроенным значением максимального значения крутящего момента вала рулевого механизма перед этапом приведения в движение, и этап восстановления максимального значения крутящего момента, на котором восстанавливают максимальное значение крутящего момента до начального значения после этапа приведения в движение.
[0055] В описанном выше испытательном устройстве, управляющая часть может быть выполнена с возможностью выполнять процесс обнаружения передаточного отношения скорости, причем процесс обнаружения передаточного отношения скорости включает в себя этап приведения во вращательное движение во всем диапазоне, на котором приводят во вращательное движение вал рулевого механизма в пределах по существу всего диапазона движения вала рулевого механизма, этап обнаружения положения выходной стороны во всем диапазоне, на котором обнаруживают, на этапе приведения во вращательное движение во всем диапазоне, угловые положения подвижного основания для множества угловых положений вала рулевого механизма с заданными интервалами в пределах по существу всего диапазона движения вала рулевого механизма, и этап вычисления передаточного отношения скорости, на котором вычисляют передаточное отношение скорости, являющееся отношением угла поворота подвижного основания к углу поворота вала рулевого механизма в каждой секции диапазона движения вала рулевого механизма, разделенной на множество угловых положений, на основе результата обнаружения на этапе обнаружения положения выходной стороны во всем диапазоне.
[0056] Описанное выше испытательное устройство может быть выполнено с возможностью прерывисто приводить в движение вал рулевого механизма с заданным интервалом на этапе приведения во вращательное движение во всем диапазоне и обнаруживать угловое положение подвижного основания каждый раз, когда вал рулевого механизма приводится во вращательное движение с заданным интервалом на этапе обнаружения положения выходной стороны во всем диапазоне.
[0057] Описанное выше испытательное устройство может включать в себя этап приведения в соответствие, на котором определяют формулу вычисления, представляющую соотношение между угловым положением вала рулевого механизма и передаточным отношением скорости на основе значения передаточного отношения скорости в каждой из секций, вычисленного на этапе вычисления передаточного отношения скорости.
[0058] В описанном выше испытательном устройстве, управляющая часть может включать в себя средство приема настроенного значения нагрузки, выполненное с возможностью принимать максимальное значение нагрузки, являющееся настроенным значением максимального значения допустимого диапазона нагрузки, и второй индекс, указывающий на настроенное значение нагрузки, отличное от максимального значения нагрузки, и средство вычисления настроенного значения нагрузки, выполненное с возможностью вычислять настроенное значение нагрузки на основе максимального значения нагрузки и второго индекса, принимаемого средством приема настроенного значения нагрузки.
[0059] В описанном выше испытательном устройстве, второй индекс может быть отношением настроенного значения нагрузки к максимальному значению нагрузки, и средство вычисления настроенного значения нагрузки может выдавать значение, получаемое умножением максимального значения нагрузки на второй индекс, в качестве настроенного значения нагрузки.
[0060] В описанном выше испытательном устройстве, управляющая часть может включать в себя средство вычисления целевого значения, выполненное с возможностью вычислять целевое значение управляемой переменной первого двигателя на основе настроенного значения нагрузки.
[0061] Согласно четвертому аспекту настоящего изобретения обеспечено испытательное устройство, включающее в себя приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма, обеспеченного в качестве образца, и управляющую часть, выполненную с возможностью управлять приведением во вращательное движение вала рулевого механизма приводной частью входной стороны, причем управляющая часть выполнена с возможностью выполнять процесс управления изменением направления движения на обратное, в котором сразу же изменяют направление вращения вала рулевого механизма на обратное, когда угловое положение вала рулевого механизма достигает положения концевого упирания, являющегося концом диапазона движения вала рулевого механизма, и причем процесс управления изменением направления движения на обратное включает в себя процесс пропуска, в котором перескакивают в следующую точку управления, в которой, как ожидается, крутящий момент будет по существу равен крутящему моменту в то время, когда вал рулевого механизма достигает положения концевого упирания.
[0062] Согласно пятому аспекту настоящего изобретения, обеспечено испытательное устройство, включающее в себя приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма, обеспеченного в качестве образца, и управляющую часть, выполненную с возможностью управлять приведением во вращательное движение вала рулевого механизма приводной частью входной стороны, причем управляющая часть выполнена с возможностью выполнять процесс управления изменением направления движения на обратное, в котором изменяют направление вращения вала рулевого механизма на обратное, когда угловое положение вала рулевого механизма достигает положения концевого упирания, являющегося концом диапазона движения вала рулевого механизма, и причем процесс управления изменением направления движения на обратное включает в себя процесс пропуска, в котором перескакивают в следующую точку управления, в которой целевое значение углового положения вала рулевого механизма уменьшается по существу до того же уровня, что и некоторое значение в то время, когда крутящий момент вала рулевого механизма превышает заданное значение.
[0063] Согласно шестому аспекту настоящего изобретения, обеспечен способ настройки испытательного процесса. В способе настройки изменяющегося во времени испытательного процесса, испытательный процесс настраивают посредством разбиения на модули и иерархического упорядочивания испытательного процесса.
[0064] В описанном выше способе настройки, испытательный процесс может включать в себя множество модулей процесса, подлежащих последовательному выполнению, и модуль процесса может определять часть испытательного процесса.
[0065] В описанном выше способе настройки, модуль процесса может включать в себя модуль процесса первого уровня, определяющий основной блок испытательного процесса, и модуль процесса второго уровня, включающий в себя множество модулей процесса первого уровня.
[0066] В описанном выше способе настройки, модуль процесса может включать в себя модуль процесса третьего уровня, включающий в себя множество модулей процесса первого уровня или модулей процесса второго уровня, причем модуль процесса третьего уровня включает в себя по меньшей мере один модуль процесса второго уровня.
[0067] Описанный выше способ настройки может включать в себя настройку глобального предела, являющегося пределом, подлежащим применению ко всем секциям модуля процесса, и настройку локального предела, являющегося пределом, подлежащим ограниченному применению к некоторым секциям модуля процесса.
[0068] В описанном выше способе настройки, локальный предел может быть выполнен с возможностью настраиваться для множества секций.
[0069] В описанном выше способе настройки, пределы могут включать в себя максимальные значения и минимальные значения.
[0070] В описанном выше способе настройки, пределы могут включать в себя по меньшей мере одно из нижеследующего с (а) до (d):
(а) угловое положение вращения вала рулевого механизма образца;
(b) крутящий момент, который действует на вал рулевого механизма образца;
(c) угловое положение поворота рычага испытательного устройства, соответствующего рычагу поворотного кулака; и
(d) нагрузка, которая действует на поперечную рулевую тягу образца.
[0071] В описанном выше способе настройки, локальный предел может быть настроен в качестве относительного значения для глобального предела.
[0072] Согласно седьмому аспекту настоящего изобретения, обеспечен способ испытания рулевого механизма, включающий в себя процедуру замедления, при которой постепенно увеличивают нагрузку, которая является осевой силой, подлежащей приложению к образцу, до настроенного значения.
[0073] В описанном выше способе настройки, нагрузка может быть увеличена поэтапно за настроенное число раз.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0074] Согласно первому, четвертому и пятому аспектам настоящего изобретения, посредством приведения в движение вала рулевого механизма таким образом, чтобы заданный крутящий момент, который не превышает допустимое значение, действовал на образец при достижении положения концевого упирания, можно обеспечить более подходящее оценивание образца.
[0075] Согласно второму аспекту настоящего изобретения, становится возможным управлять нагрузкой, подлежащей приложению к рулевому механизму, с более высокой точностью, и, таким образом, становится возможным обеспечить более подходящее оценивание образца.
[0076] Согласно третьему аспекту настоящего изобретения, степень свободы нагрузки, подлежащей приложению к рулевому механизму, увеличивается, и становится возможным прикладывать нагрузку, более близкую к нагрузке, которая действует на рулевой механизм, устанавливаемый на реальное транспортное средство, и, таким образом, становится возможным обеспечить более подходящее оценивание образца.
[0077] Согласно шестому аспекту настоящего изобретения, становится возможным более эффективно настраивать сложные условия испытания рулевого механизма.
[0078] Согласно седьмому аспекту настоящего изобретения, поскольку испытание может быть остановлено перед приложением избыточной нагрузки к образцу, становится возможным предотвратить повреждение образца из-за ошибки в прикреплении образца к испытательному устройству.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0079] Фиг. 1 является внешним видом испытательного устройства согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 является схематическим изображением, показывающим состояние, в котором образец соединен с каждой частью испытательного устройства.
Фиг. 3 является внешним видом приводной части входной стороны.
Фиг. 4 является внешним видом приводной части входной стороны.
Фиг. 5 является видом сбоку колоннообразной опорной части.
Фиг. 6 является внешним видом основания колонки.
Фиг. 7 является изображением, показывающим основную конструкцию приводной части выходной стороны.
Фиг. 8 является внешним видом приводной части выходной стороны.
Фиг. 9 является блок-схемой, показывающей схематичную конфигурацию системы управления.
Фиг. 10 является экраном меню, подлежащим отображению после активации испытательного устройства.
Фиг. 11 является экраном настройки, отображаемым в процессе настройки условий испытания.
Фиг. 12 является изображением, показывающим структуру вложенности модуля процесса.
Фиг. 13 является изображением, показывающим схематичную конфигурацию созданной таблицы последовательности.
Фиг. 14 является экраном настройки, отображаемым во время выполнения подпрограммы настройки испытательной группы.
Фиг. 15 является экраном настройки, отображаемым во время выполнения подпрограммы настройки испытательного блока.
Фиг. 16 является экраном настройки, отображаемым во время выполнения подпрограммы настройки образца формы волны.
Фиг. 17 является изображением, показывающим схематичную конфигурацию экрана редактирования образца формы волны.
Фиг. 18 является изображением, показывающим схематичную конфигурацию экрана настройки пределов.
Фиг. 19 является блок-схемой последовательности операций, показывающей процедуру испытания на надежность рулевого механизма.
Фиг. 20 является блок-схемой последовательности операций, показывающей процедуру процесса проверки полярности.
Фиг. 21 является блок-схемой последовательности операций, показывающей процедуру процесса центрирования.
Фиг. 22 является блок-схемой последовательности операций, показывающей процедуру процесса обнаружения передаточного отношения.
Фиг. 23 является блок-схемой последовательности операций, показывающей процедуру основного управления приведением в движение.
Фиг. 24 является блок-схемой последовательности операций, показывающей процедуру управления входной осью (управления положением).
Фиг. 25 является блок-схемой последовательности операций, показывающей процедуру управления нагрузкой.
Фиг. 26 является блок-схемой последовательности операций, показывающей процедуру процесса замедления.
Фиг. 27 является графиком, показывающим пример изменения коэффициента нагрузки вследствие процесса замедления.
Фиг. 28 является блок-схемой последовательности операций, показывающей процедуру модификации управления нагрузкой.
Фиг. 29 является блок-схемой последовательности операций, показывающей процедуру модификации управления нагрузкой.
Фиг. 30 является графиком, показывающим соотношение между угловым положением вала рулевого механизма и нагрузкой в Примере 1 управления пружинной нагрузкой.
Фиг. 31 является графиком, показывающим соотношение между угловым положением вала рулевого механизма и нагрузкой в Примере 2 управления пружинной нагрузкой.
Фиг. 32 является блок-схемой последовательности операций, показывающей процедуру управления пружинной нагрузкой.
Фиг. 33 является блок-схемой последовательности операций, показывающей процедуру управления колебанием.
Фиг. 34 является блок-схемой последовательности операций, показывающей процедуру управления концевым упиранием.
Фиг. 35 является блок-схемой последовательности операций, показывающей процедуру управления концевым упиранием.
Фиг. 36 является блок-схемой последовательности операций, показывающей процедуру управления входным валом (управления крутящим моментом).
Фиг. 37 является блок-схемой последовательности операций, показывающей процедуру управления изменением направления движения на обратное.
Фиг. 38 является графиком (испытательной формой волны входного вала) для объяснения поведения управления изменением направления движения на обратное.
Фиг. 39 является блок-схемой последовательности операций, показывающей процедуру процесса пропуска.
Фиг. 40 является графиком (испытательной формой волны входной оси) для объяснения поведения модификации процесса поиска целевого положения перескакивания.
Фиг. 41 является блок-схемой последовательности операций, показывающей процедуру модификации процесса поиска целевого положения перескакивания.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ДЛЯ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
[0080] Далее со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения. В нижеследующем описании, одинаковым или соответствующим элементам присвоены одинаковые или соответствующие ссылочные позиции, и их избыточное описание будет опущено. Дополнительно, в каждом чертеже, в случае, когда показано множество элементов, имеющих общую ссылочную позицию, эта ссылочная позиция может не присваиваться всем элементам множества, и присвоение ссылочной позиции части элементов множества может быть, соответственно, опущено. Относительно конфигурации, которая обеспечивается слева и справа в виде пары, по общему правилу описывается конфигурация слева, и конфигурация справа читается вместе в квадратных скобках, и их избыточное описание опускается.
[0081] Испытательное устройство 1 (так называемое «испытательное устройство рулевого механизма») согласно одному варианту осуществления настоящего изобретения является устройством, выполненным с возможностью испытывать рулевой механизм для транспортного средства, такого как автомобиль. Испытательное устройство 1 может быть использовано для испытания рулевых механизмов пассажирских автомобилей, грузовых автомобилей, автобусов, и специальных транспортных средств, таких как прицепы.
[0082] Фиг. 1 является внешним видом испытательного устройства 1. В нижеследующем описании, направление сверху-справа вниз-влево на фиг. 1 определено как направление оси Х, направление сверху-слева вниз-вправо определено как направление оси Y, и направление снизу вверх определено как направление оси Z. Направление оси Х и направление оси Y являются горизонтальными направлениями, ортогональными друг другу, и направление оси Z является вертикальным направлением. Направление оси Х соответствует направлению перемещения транспортного средства, к которому должен быть прикреплен рулевой механизм, обеспеченный в качестве образца W, и положительное направление оси Х называется «направлением вперед», отрицательное направление оси Х называется «направлением назад», положительное направление оси Y называется «направлением влево», и отрицательное направление оси Y называется «направлением вправо».
[0083] Фиг. 2 является схематическим изображением, показывающим состояние, в котором образец W прикреплен к испытательному устройству 1. Испытательное устройство 1 является устройством, выполненным с возможностью испытывать характеристики и надежность рулевого механизма посредством вращения вала W1 рулевого механизма при приложении осевой силы (нагрузки L) к левой и правой поперечным рулевым тягам W4 рулевого механизма, обеспеченного в качестве образца W.
[0084] Как показано на фиг. 1, испытательное устройство 1 включает в себя держатель 10, приводную часть 20 входной стороны, колоннообразную опорную часть 30, поддерживающую приводную часть 20 входной стороны, основание 40 колонки, колоннообразную опорную часть 50, поддерживающую основание 40 колонки, пару из левой и правой приводных частей 60 (60L и 60R) выходной стороны, и стол 70.
[0085] Как показано на фиг. 2, приводная часть 20 входной стороны соединена с валом W1 рулевого механизма образца W и приводит во вращательное движение вал W1 рулевого механизма. Приводные части 60L и 60R выходной стороны соединены с левой и правой поперечными рулевыми тягами W4 образца W, соответственно, и прикладывают нагрузку L к поперечным рулевым тягам W4. Рулевая колонка W2 образца W прикреплена к основанию 40 колонки, и картер W3 рулевого механизма образца W прикреплен к столу 70.
[0086] Как показано на фиг. 1, колоннообразные опорные части 30 и 50, приводные части 60L и 60R выходной стороны, и стол 70 установлены на держатель 10. Приводная часть 20 входной стороны прикреплена к колоннообразной опорной части 30, и основание 40 колонки прикреплено к колоннообразной опорной части 50.
[0087] Держатель 10 включает в себя закрепленную раму 11, расположенную на передней стороне, закрепленную раму 12, расположенную на задней стороне закрепленной рамы 11, и пару из левой и правой подвижных рам 15 (15L и 15R), расположенных на закрепленной раме 12. На закрепленной раме 11, пара из левого и правого оснований 71 стола 70 прикреплена в центральной части, и основания 611b пары приводных частей 60L и 60R выходной стороны прикреплены на левой и правой сторонах относительно стола 70. Основание 51 опоры 50 прикреплено к правой подвижной раме 15R, и основание 31 колоннообразной опорной части 30 прикреплено к левой подвижной раме 15L.
[0088] Множество Т-образных пазов 111, продолжающихся в направлении оси Y, образовано на верхней поверхности закрепленной рамы 11 как на левой, так и на правой сторонах стола 70, и множество Т-образных пазов 112, продолжающихся в направлении оси Х, образовано в центре верхней поверхности закрепленной рамы 11 в направлении влево-вправо. Множество Т-образных пазов 121, продолжающихся в направлении оси Y, образовано на верхней поверхности закрепленной рамы 12. Множество Т-образных пазов 151, продолжающихся в направлении оси Х, также образовано на верхней поверхности каждой подвижной рамы 15. Множество Т-образных пазовых гаек (не показаны) установлено в каждый из Т-образных пазов 111, 112, 121 и 151.
[0089] Каждая из закрепленных рам 11 и 12 и подвижных рам 15L и 15R снабжена винтовым механизмом подачи (не показан), параллельным соответствующим Т-образным пазам 111, 112, 121 и 151.
[0090] Каждая подвижная рама 15 прикреплена к закрепленной раме 12 Т-образными пазовыми гайками, установленными в каждом Т-образном пазе 121, и болтами (не показаны). Положение подвижной рамы 15 в направлении оси Y может быть настроено посредством ослабления болтов и перемещения винтового механизма подачи, обеспеченного параллельно Т-образным пазам 121.
[0091] Основание 611b каждой приводной части 60 выходной стороны прикреплено к закрепленной раме 11 Т-образными пазовыми гайками, установленными в каждый Т-образный паз 111, и болтами (не показаны). Посредством ослабления болтов и перемещения винтового механизма подачи, обеспеченного параллельно Т-образным пазам 111, может быть настроено положение каждой приводной части 60 выходной стороны в направлении оси Y.
[0092] Каждое основание 71 стола 70 прикреплено к закрепленной раме 11 Т-образными пазовыми гайками, установленными в каждый Т-образный паз 112, и болтами (не показаны). Посредством ослабления болтов и перемещения винтового механизма подачи, обеспеченного параллельно Т-образным пазам 112, может быть настроено положение стола 70 в направлении оси Х.
[0093] Каждое из основания 31 колоннообразной опорной части 30 и основания 51 колоннообразной опорной части 50 прикреплено к подвижной раме 15 Т-образными пазовыми гайками, установленными в Т-образные пазы 151 подвижной рамы 15, и болтами (не показаны). Посредством ослабления болтов и перемещения винтового механизма подачи, обеспеченного параллельно Т-образным пазам 151, могут быть настроены положения колоннообразных опорных частей 30 и 50 в направлении оси Х.
[0094] А именно, согласно форме и размеру образца W, положение колоннообразной опорной части 30 (приводной части 20 входной стороны) и колоннообразной опорной части 50 (основания 40 колонки) в направлениях вперед-назад и влево-вправо, положение каждой приводной части 60 выходной стороны в направлении влево-вправо, и положение стола 70 в направлении вперед-назад являются настраиваемыми.
[0095] Фиг. 3 и 4 являются изображениями, показывающими приводную часть 20 входной стороны, прикрепленную к колоннообразной опорной части 30, и фиг. 5 является видом сбоку колоннообразной опорной части 30 (за исключением поднимающей части 36, которая будет описана ниже). Колоннообразная опорная часть 30 включает в себя основание 31, поворотную платформу 32, линейную платформу 33, поворотную колонну 34, и поднимающую часть 36 (фиг. 3 и 4), прикрепленную к поворотной колонне 34 для перемещения вверх и вниз. Приводная часть 20 входной стороны прикреплена к поднимающей части 36.
[0096] Как показано на фиг. 5, поворотная платформа 32 включает в себя цилиндрическую трубчатую часть 321, прикрепленную к основанию 31, и колоннообразную колонную часть 322, поворотно установленную в трубчатой части 321.
[0097] Линейная платформа 33 включает в себя закрепленный блок 331, прикрепленный к верхней концевой части колонной части 322 поворотной платформы 32 на одной концевой части в направлении скольжения (в направлении оси Y в показанном расположении) ее нижней поверхности, и подвижный блок 332, выполненный с возможностью скользить в направлении скольжения относительно закрепленного блока 331.
[0098] Поворотная колонна 34 включает в себя колоннообразную колонную часть 342, установленную на подвижный блок 332 линейной платформы 33, цилиндрическую трубчатую часть 341, поворотно прикрепленную к колонной части 342, и зубчатую рейку 343, прикрепленную к боковой поверхности трубчатой части 341 параллельно оси трубчатой части 341. Поворотная платформа 32 и поворотная колонна 34 эксцентрически соединены друг с другом через линейную платформу 33, причем их оси вращения ориентированы вертикально. Посредством вращения поворотной платформы 32 и поворотной колонны 34, эксцентрически соединенных друг с другом, и скольжения линейной платформы 33 можно настраивать ориентацию относительно оси Z и положение в направлениях оси Х и оси Y поднимающей части 36, прикрепленной к трубчатой части 341 поворотной колонны 34 (и приводной части 20 входной стороны, прикрепленной к поднимающей части 36).
[0099] Как показано на фиг. 3, поднимающая часть 36 включает в себя часть 361 основного тела, которая вертикально прикрепляется с возможностью скольжения к трубчатой части 341 поворотной колонны 34, горизонтально продолжающийся вал 362, поворотно прикрепленный к части 361 основного тела, и поворотную часть 363, прикрепленную к дистальной концевой части вала 362. Приводной механизм 361g, включающий в себя шестерню (не показана), которая сцепляется с зубчатой рейкой 343, обеспечен на основном теле 361 поднимающей части 36. При повороте ручки 361а, соединенной с входным валом приводного механизма 361g, шестерня поворачивается, и поднимающая часть 36 перемещается в вертикальном направлении вдоль поворотной колонны 34. Это позволяет настраивать высоту приводной части 20 входной стороны, прикрепленной к поднимающей части 36.
[0100] Часть 361 основного тела поднимающей части 36 включает в себя механизм поворота (не показан), который поворачивает вал 362 относительно центральной оси. При повороте ручки (не показана), соединенной с механизмом поворота, поворотная часть 363 и приводная часть 20 входной стороны поворачиваются вместе с валом 362, посредством чего может быть настроен наклон приводной части 20 входной стороны относительно горизонтальной оси.
[0101] Поворотная часть 363 (фиг. 3 и 4) поднимающей части 36 включает в себя закрепленную раму 363а, прикрепленную к дистальной концевой части вала 362 (фиг. 3), подвижную раму 363b, к которой прикреплена приводная часть 20 входной стороны, и механизм 364 скольжения, который соединяет с возможностью скольжения закрепленную раму 363а и подвижную раму 363b в одном направлении, перпендикулярном валу 362. Механизм 364 скольжения включает в себя пару рельсов 364а (фиг. 4), которая направляет скольжение подвижной рамы 363b, и винтовой механизм 364b подачи (фиг. 3), который заставляет скользить подвижную раму 363b. При повороте ручки (не показана), соединенной с винтом подачи винтового механизма 364b подачи, подвижная рама 363b поворотной части 363, прикрепленной к приводной части 20 входной стороны, перемещается в одном направлении, перпендикулярном валу 362 (более конкретно, в осевом направлении вала W1 рулевого механизма образца W, соединенного с приводной частью 20 входной стороны), винтовым механизмом 364b подачи.
[0102] Как показано на фиг. 4, приводная часть 20 входной стороны включает в себя серводвигатель 21, необязательный редуктор 22 скорости, который уменьшает скорость вращения выходной части серводвигателя 21, датчик 23 крутящего момента (средство обнаружения крутящего момента), который обнаруживает выходной крутящий момент, и патрон 24 (выходной вал), к которому должен быть прикреплен вал W1 рулевого механизма образца W.
[0103] Фиг. 6 является видом, показывающим основание 40 колонки, прикрепленное к колоннообразной опорной части 50. Колоннообразная опорная часть 50 включает в себя опорную колонну 55, поднимающую часть 56, прикрепленную к опорной колонне 55 для перемещения вверх и вниз, линейную направляющую часть 52, которая направляет перемещение вверх и вниз поднимающей части 56, и приводную часть 54, которая заставляет поднимающую часть 56 перемещаться вверх и вниз.
[0104] Линейная направляющая часть 52 включает в себя верхнюю пластину 521, горизонтально прикрепленную к верхнему концу опорной колонны 55, нижнюю пластину 522, горизонтально прикрепленную к нижней части опорной колонны 55, и три направляющих стержня 523 (только два из них показаны на фиг. 6), соединяющие верхнюю пластину 521 и нижнюю пластину 522. В поднимающей части 56 образованы три вертикально продолжающихся паза 561, в которые устанавливаются с возможностью скольжения соответствующие направляющие стержни 523. Посредством установки 3 наборов из направляющих стержней 523 и пазов 56, направление движения поднимающей части 56 ограничено только вертикальным направлением.
[0105] Приводная часть 54 включает в себя червяк 542, соединяющий верхнюю пластину 521 и нижнюю пластину 522 линейной направляющей части 52, и коробку 544 передач, прикрепленную к поднимающей части 56. Коробка 544 передач включает в себя червячное колесо (не показано), которое сцепляется с червяком 542, и ручку (не показана), соединенную с червячным колесом. При повороте ручки червячное колесо поворачивается, и приводная часть 54 и поднимающая часть 56 перемещаются вверх и вниз.
[0106] Поднимающая часть 56 включает в себя механизм 562 поворота (или приводной механизм), который поворачивает основание 40 колонки относительно горизонтальной оси, и основание 40 колонки прикреплено к валу 562b (выходному валу) механизма 562 поворота, который продолжается горизонтально. При повороте ручки 562а, соединенной с входным валом механизма 562 поворота, вращение замедляется, и вал 562b поворачивается, и изменяется наклон основания 40 колонки, прикрепленного к валу 562b.
[0107] Фиг. 7 и 8 являются изображениями, показывающими приводную часть 60R выходной стороны на правой стороне. Фиг. 7 является изображением, показывающим основную конструкцию приводной части 60R выходной стороны, если смотреть спереди, и фиг. 8 является внешним видом приводной части 60R выходной стороны, если смотреть слева. На фиг. 7 и 8, некоторые из компонентов приводной части 60R выходной стороны не показаны для удобства объяснения.
[0108] Приводная часть 60 выходной стороны включает в себя раму 61 (фиг. 8), серводвигатель 62, необязательный редуктор 63 скорости, датчик 64 крутящего момента, шариковое шлицевое средство 65, подвижное основание 66, серводвигатель 67 (фиг. 7), и механизм 68 линейного движения (фиг. 7). Шариковое шлицевое средство 65 включает в себя шлицевый вал 651 и гайку 652. Шлицевый вал 651 и гайка 652 прикреплены друг к другу с возможностью скольжения в осевом направлении. Следует отметить, что датчик 64 крутящего момента является примером части для обнаружения крутящего момента, которая обнаруживает крутящий момент, генерируемый серводвигателем 62 и усиливаемый необязательным редуктором 63 скорости.
[0109] Шлицевый вал 651 соединен с выходным валом редуктора 63 скорости через датчик 64 крутящего момента. Шлицевый вал 651 приводится во вращательное движение выходным устройством серводвигателя 62, скорость которого уменьшена редуктором 63 скорости. Гайка 652, прикрепленная к шлицевому валу 651, также приводится во вращательное движение вместе с шлицевым валом 651. Крутящий момент, действующий на шариковое шлицевое средство 65, обнаруживается датчиком 64 крутящего момента. Высота подвижного основания 66, к которому должна быть прикреплена поперечная рулевая тяга W4 образца W, может быть настроена механизмом 68 линейного движения. Механизм 68 линейного движения приводится в движение серводвигателем 67. Конфигурация механизма 68 линейного движения будет описана ниже.
[0110] Подвижное основание 66 является частью, соответствующей поворотному кулаку, который поддерживает ось рулевого колеса в транспортном средстве, снабженном рулевым механизмом, и пара рычагов 661, продолжающихся в направлении вперед-назад по существу ортогонально оси шарикового шлицевого средства 65 (т.е., оси вращения подвижного основания 66), обеспечена в нижней части подвижного основания 66. Пара рычагов 661 включает в себя передний рычаг 661f, продолжающийся вперед, и задний рычаг 661r, продолжающийся назад. Передний рычаг 661f и задний рычаг 661r образованы симметрично друг другу относительно плоскости, включающей в себя ось вращения подвижного основания 66, и по существу симметрично относительно оси вращения подвижного основания 66. Рычаг 661 является частью, которая соответствует поворотному кулаку транспортного средства, и конец поперечной рулевой тяги W4 образца W прикреплен к рычагу 661. Когда крутящий момент прикладывается к подвижному основанию 66 серводвигателем 62, нагрузка L прикладывается к поперечной рулевой тяге W4 образца W в виде осевой силы.
[0111] Дополнительно, в реальном транспортном средстве, поворотный кулак, к которому прикреплена поперечная рулевая тяга W4 рулевого механизма, поддерживается подвеской и, таким образом, перемещается вверх и вниз относительно рамы транспортного средства во время движения. А именно, динамическое усилие прикладывается к рулевому механизму, установленному на реальное транспортное средство, поворотным кулаком во время движения. Посредством перемещения подвижного основания 66 вверх и вниз серводвигателем 67 и механизмом 68 линейного движения, можно прикладывать к образцу W динамическое усилие, подобное динамическому усилию во время движения транспортного средства. В случае этой конфигурации становится возможным испытывать образец W в условиях испытания, приближенных к условиям, в которых находится образец W, установленный на реальное транспортное средство, для обеспечения более подходящего оценивания образца W.
[0112] Как показано на фиг. 8, рама 61 включает в себя нижнюю раму 611, прикрепленную к закрепленной раме 11, и верхнюю раму 612, установленную на верхнюю пластину 611а нижней рамы 611. Редуктор 63 скорости и серводвигатель 67 (фиг. 7) прикреплены к верхней пластине 611а нижней рамы 611.
[0113] Как показано на фиг. 7 и 8, механизм 68 линейного движения включает в себя верхнюю раму 681 и нижнюю раму 682, прикрепленные к нижней раме 611, подвижную раму 683, расположенную между верхней рамой 681 и нижней рамой 682 и подвижную в вертикальном направлении, направляющую 684 скольжения (фиг. 7), которая направляет вертикальное перемещение подвижной рамы 683, и винтовой механизм 685 подачи (фиг. 7), который приводит в движение подвижную раму 683.
[0114] Направляющая 684 скольжения, показанная на фиг. 7, включает в себя вертикально установленный стержень 684а, и втулку 684b, установленную с возможностью скольжения на стержень 684а. Втулка 684b может быть, например, подшипником скольжения или подшипником качения, снабженным телами качения, такими как шарики или ролики. Стержень 684а прикреплен к верхней раме 681 на верхней концевой части и к нижней раме 682 на нижней концевой части. Втулка 684b прикреплена к подвижной раме 683.
[0115] Винтовой механизм 685 подачи, показанный на фиг. 7, включает в себя вертикально установленный шариковый винт 585а и гайку 685b, установленную на шариковый винт 585а. Шариковый винт 585а поддерживается с возможностью вращения на своей верхней концевой части подшипником 681b, обеспеченным на верхней раме 681, и поддерживается с возможностью вращения на своей нижней концевой части подшипником 682b, обеспеченным на нижней раме 682. Гайка 685b прикреплена к подвижной раме 683.
[0116] Шлицевый вал 651 поддерживается с возможностью вращения на его верхней концевой части подшипником 681а, обеспеченным на верхней раме 681, и поддерживается с возможностью вращения на его нижней концевой части подшипником 682а, обеспеченным на нижней раме 682. Гайка 652, прикрепленная с возможностью скольжения к шлицевому валу 651, и подвижное основание 66, прикрепленное к гайке 652, поддерживаются с возможностью вращения коаксиально со шлицевым валом 651 подшипником 683а, обеспеченным на подвижной раме 683. Подвижное основание 66 приводится во вращательное движение серводвигателем 62 вместе с шариковым шлицевым средством 65. Когда подвижная рама 683 приводится в движение вверх и вниз серводвигателем 67 и механизмом 68 линейного движения, гайка 652 подвижного основания 66 также перемещается вверх и вниз вместе с подвижной рамой 683.
[0117] Как показано на фиг. 8, подвижное основание 66 имеет вышеупомянутую пару рычагов 661 (передний рычаг 661f и задний рычаг 661r), продолжающихся в направлении вперед-назад в начальном состоянии (начальном положении), эквивалентном состоянию прямолинейного движения транспортного средства. Как показано на фиг. 7, рычаг 661 образован с удлиненным отверстием 661h, продолжающимся в направлении продолжения рычага 661, для прикрепления конца W41 поперечной рулевой тяги образца W. Следует отметить, что передний рычаг 661f является рычагом 661 для прикрепления так называемого образца W «переднего рулевого устройства», и задний рычаг 661r является рычагом 661 для прикрепления так называемого образца W «заднего рулевого устройства», но испытание может быть также осуществлено посредством прикрепления образца W к противоположному рычагу (например, заднему рычагу 661r для «переднего рулевого устройства»). Однако в случае, когда образец W прикреплен к противоположному рычагу, поскольку направление вращения поворотного кулака в реальном транспортном средстве и направление вращения подвижного основания 66 противоположны друг другу, необходимо настроить полярность испытательного устройства 1 (т.е., соотношение между направлением вращения вала W1 рулевого механизма и направлением вращения подвижного основания 66) на «отрицательную» полярность.
[0118] Рычаг 661 снабжен датчиком 662 силы в качестве средства обнаружения нагрузки, которое обнаруживает осевую нагрузку (нагрузку L), действующую на поперечную рулевую тягу W4 образца W. Конец W41 поперечной рулевой тяги образца W прикреплен к рычагу 661 (переднему рычагу 661f или заднему рычагу 661r) через датчик 662 силы. Следует отметить, что средство обнаружения нагрузки может быть прикреплено прямо к образцу W. Например, датчик усилия может быть прикреплен к поверхности поперечной рулевой тяги W4 образца W, и датчик усилия может быть использован в качестве средства обнаружения нагрузки.
[0119] Фиг. 9 является блок-схемой, показывающей схематичную конфигурацию системы 1а управления испытательного устройства 1. Система 1а управления является компьютерной системой, включающей в себя управляющую часть 82, которая управляет поведением всего испытательного устройства 1, и измерительную часть 84, которая осуществляет различные измерения. Управляющая часть 82 включает в себя CPU 821, основное запоминающее устройство 822, интерфейсную часть 823, и память 824 (вспомогательное запоминающее устройство). Память 824 может быть, например, накопителем на жестких дисках (Hard Disc Drive - HDD) или твердотельным накопителем (Solid State Drive - SSD), и различные программы для управления испытательным устройством 1 (например, программа 824а управления, программа 824b настройки, и программа 824с испытания, которые будут описаны ниже) могут храниться в памяти 824.
[0120] Интерфейсная часть 823 является блоком, который участвует в обмене входными данными и выходными данными между блоком 82 управления и внешним миром. Интерфейсная часть 823 включает в себя, например, один или несколько пользовательских интерфейсов для осуществления обмена входными данными и выходными данными с пользователем, сетевой интерфейс для соединения проводным или беспроводным способом с различными сетями NW, такими как локальная сеть (Local Area Network - LAN), и различные интерфейсы связи, такие как универсальная последовательная шина (universal Serial Bus - USB) и шина интерфейса общего назначения (General Purpose Interface Bus - GPIB) для соединения с внешним устройством проводным или беспроводным способом. Пользовательский интерфейс включает в себя, например, одно или несколько различных устройств ввода/вывода, таких как различные переключатели режимов работы, дисплей, различные устройства отображения, такие как жидкокристаллический дисплей (Liquid Crystal Display - LCD), различные указывающие устройства, такие как мышь и сенсорная панель, сенсорный экран, видеокамеру, принтер, сканер, зуммер, громкоговоритель, микрофон, и устройство считывания/записи карты памяти. Портативный терминал, такой как смартфон, выполненный с возможностью связываться с блоком 82 управления, может быть также использован в качестве интерфейсной части 823 или части управляющей части 82.
[0121] Серводвигатель 21 приводной части 20 входной стороны и серводвигатели 62 и 67 приводных частей 60R и 60L выходной стороны соединены с управляющей частью 82 через соответствующие сервоусилители 83.
[0122] Управляющая часть 82 и каждый сервоусилитель 83 соединены оптические волокном, чтобы они могли связываться с высокой скоростью. В этой конфигурации возможно синхронное управление пятью серводвигателями 21, 62 (60L), 62 (60R), 67 (60L), и 67 (60R) с повышенной точностью (высоким разрешением и высокой точностью в масштабе времени). Управляющая часть 82 передает команду для каждого серводвигателя каждому сервоусилителю 83 с постоянным циклом. В описании настоящего изобретения, один единичный (единственный) процесс управления приведением в действие серводвигателя посредством одной команды или часть процесса управления приведением в действие, соответствующая одной команде, называется точкой управления.
[0123] Датчики 23, 64 (60L) и 64 (60R) крутящего момента и датчики 662 (60L) и 662 (60R) силы соединены с измерительной частью 84. Измерительная часть 84 преобразует сигнал, получаемый от каждого датчика, в цифровые данные и передает цифровые данные управляющей части 82. Дополнительно, информация о вращении вала (конкретно, например, об угловом положения и угловой скорости), обнаруживаемая кодером RE поворота, встроенным в каждый серводвигатель, вводится в управляющую часть 82 через каждый сервоусилитель 83. Следует отметить, что кодер RE поворота является примером средства обнаружения положения, которое обнаруживает угловое положение вала каждого серводвигателя, а также является примером средства обнаружения скорости, которое обнаруживает угловую скорость вала каждого серводвигателя.
[0124] Испытательное устройство 1 выполнено с возможностью функционировать совместно с внешними устройствами. Например, средство ED1 настройки температуры (фиг. 9), такое как печь постоянной температуры, для настройки температуры образца W, может быть соединено с испытательным устройством 1 для добавления функции настройки температуры испытательному устройству 1. Средство ED1 настройки температуры может быть установлено, например, на столе 70 или на основании 40 колонки, поддерживающем электронный блок управления (electronic control unit - ECU) образца W.
[0125] Управляющая часть 82 синхронно управляет приведением в действие соответствующих серводвигателей на основе условий испытания (включающих в себя, например, целевые значения управляемых переменных приводной части 20 входной стороны [углового положения θ20 и угловой скорости ω20] и управляемых переменных приводной части 60 выходной стороны [нагрузки L, вертикального смещения D, вертикальной скорости V или вертикального ускорения A подвижного основания 66]), вводимых через интерфейсную часть 823. Процессы, показанные на фиг. 19, которые будут описаны ниже, выполняются под управлением управляющей части 82.
[0126] Процесс управления приведением во вращательное движение вала W1 рулевого механизма (фиг. 2) образца W приводной частью 20 входной стороны (процессы S10 и S11 управления входным валом, которые будут описаны ниже) выполняется согласно одному из режима постоянной скорости, в котором вал W1 рулевого механизма приводится в движение с постоянной угловой скоростью ω20, режима образца, в котором повторяют приведение в движение вала W1 рулевого механизма согласно постоянному образцу формы волны, и режима внешнего сигнала, в котором вал W1 рулевого механизма приводится в движение на основе сигнала с непрерывной формой волны, вводимого снаружи. Следует отметить, что процесс управления приведением во вращательное движение вала W1 рулевого механизма образца W приводной частью 20 входной стороны может быть выполнен в процессе управления положением, в котором управляемая переменная является угловым положением θ20 вала W1 рулевого механизма (т.е., угловым положением выходного вала приводной части 20 входной стороны) (т.е., командным значением является угловое положение Θ21 вала серводвигателя 21) или в процессе управления скоростью, в котором управляемая переменная является угловой скоростью ω20 (т.е., командным значением является угловая скорость  вала серводвигателя 21).
вала серводвигателя 21).
[0127] Процесс управления нагрузкой L, подлежащей приложению к поперечной рулевой тяге W4 (фиг. 2) образца W приводной частью 60 выходной стороны (процессы S20 и Sа20 управления нагрузкой, которые будут описаны ниже), выполняется в одном из режима постоянной нагрузки, в котором всегда прикладывается постоянная нагрузка L, режима частоты, в котором нагрузка L, изменяющаяся согласно основной форме волны, непрерывно прикладывается с заданной частотой, режима образца, в котором нагрузка L, изменяющаяся согласно постоянному образцу формы волны, прикладывается повторно, режима реакции на угол рулевого механизма, в котором прикладывается нагрузка L, связанная с угловым положением θ20 вала W1 рулевого механизма, и режима внешнего сигнала, в котором прикладывается нагрузка L, изменяющаяся согласно вводимому извне сигналу с непрерывной формой волны. Процесс управления нагрузкой L может быть выполнен синхронно или вместе с процессом управления приведением в движение вала W1 рулевого механизма образца W приводной частью 20 входной стороны (процессом S10 управления входным валом, который будет описан ниже) и процессом управления вертикальным колебанием конца W41 поперечной рулевой тяги образца W посредством серводвигателя 67 приводной части 60 выходной стороны (процессом S30 управления колебаниями, который будет описан ниже).
[0128] Процесс управления вертикальным смещением D, подлежащим применению к концу W41 поперечной рулевой тяги образца W посредством приводной части 60 выходной стороны, выполняется в одном из режима постоянного смещения, в котором всегда применяется постоянное смещение D, режима частоты, в котором изменяющееся смещение D (т.е., колебание) непрерывно применяются согласно основной форме волны с заданной частотой, режима образца, в котором изменяющееся смещение D с постоянным образцом формы волны применяется повторно, синхронно или асинхронно с вращением вала W1 рулевого механизма, и режима внешнего сигнала, в котором изменяющееся смещение D применяется согласно вводимому извне сигналу с непрерывной формой волны. Следует отметить, что дополнительно к процессу управления положением, в котором вертикальное смещение D конца W41 поперечной рулевой тяги используется в качестве управляемой переменной, процесс управления колебанием конца W41 поперечной рулевой тяги образца W посредством приводной части 60 выходной стороны может быть выполнен в процессе управления скоростью, в котором скорость V вертикального перемещения конца W41 поперечной рулевой тяги используется в качестве управляемой переменной, или в процессе управления ускорением, в котором ускорение А вертикального перемещения конца W41 поперечной рулевой тяги используется в качестве управляемой переменной.
[0129] В качестве основной формы волны, подлежащей использованию в режиме частоты, дополнительно к заданной форме волны, такой как синусоидальная волна, синусоидальная полуволна, пилообразная волна, треугольная волна и трапецеидальная волна, может быть использована форма волны, измеренная во время движения реального транспортного средства, форма волны, полученная посредством моделирования, или другие произвольные синтезированные формы волн (например, форма волны, сгенерированная генератором функций и т.п.).
[0130] Образец формы волны, подлежащий использованию в режиме образца, выбирается, дополнительно к стандартному образцу, зарегистрированному заранее, на основании редактируемого образца, редактируемого пользователем на основе стандартного образца, и пользовательского образца, создаваемого пользователем.
[0131] Сигнал с непрерывной формой волны, подлежащий использованию в режиме внешнего сигнала, включает в себя, например, сигнал с некоторой формой волны, измеренный во время движения реального транспортного средства, сигнал с некоторой формой волны, полученный посредством моделирования, или другие произвольные синтезированные формы волн (например, форма волны, генерируемая генератором функций и т.п.).
[0132] Фиг. 10 является схематичным изображением экрана Sc1 меню, отображаемого на сенсорном экране интерфейсной части 823 после активации испытательного устройства 1 (после включения сетевого электропитания). Экран (графическая информация), подлежащий отображению на сенсорном экране, генерируется управляющей частью 82. Экран Sc1 меню генерируется программой 824а управления (фиг. 9), которая вызывается после активации испытательного устройства 1.
[0133] Экран Sc1 меню включает в себя кнопку Е11 начала испытания, кнопку Е12 настройки условий испытания, и кнопку Е13 окончания. При касании кнопки Е11 начала испытания вызывается программа 824с испытания (фиг. 9) для осуществления испытания рулевого механизма (фиг. 19), которая будет описана ниже, и начинается испытание, такое как испытание на надежность. При касании кнопки Е12 настройки условий испытания вызывается программа 824b настройки (фиг. 9), и начинается процесс настройки условий испытания. При касании кнопки Е13 окончания выполняется процесс перехода в состояние, в котором электропитание может быть безопасно выключено, и программа 824а управления заканчивается.
[0134] Фиг. 11 является экраном Sc2 настройки, подлежащим отображению в процессе настройки условий испытания. Процесс настройки условий испытания настоящего варианта осуществления сконфигурирован таким образом, что настройка испытательного процесса (далее называемого «испытательной последовательностью»), который разбивается на модули и иерархически упорядочивается, может быть выполнена таким образом, чтобы сложный испытательный процесс мог быть эффективно настроен. Конкретно, процесс настройки условий испытания настоящего варианта осуществления сконфигурирован таким образом, что испытательный процесс может быть настроен посредством последовательного (или параллельного) связывания модулей процесса. Следует отметить, что модуль процесса является функционально интегрированной частью, образующей настройку испытательного процесса.
[0135] Дополнительно, в настоящем варианте осуществления, модуль процесса снабжен трехуровневой структурой вложенности, состоящей из образца формы волны (первый уровень), испытательного блока (второй уровень), и испытательной группы (третий уровень). Следует отметить, что глубина (число уровней) структуры вложенности не ограничена тремя уровнями и может составлять два уровня или четыре или более уровней.
[0136] Как показано на фиг. 11, экран Sc2 настройки включает в себя окно Е20 и вкладки E21 - E24. Окно Е20 является областью отображения, в которой должен быть отображен экран настройки для каждого настраиваемого элемента. Посредством касания одной из вкладок Е21 - Е24 выбираются настраиваемые элементы, связанные с одной из вкладок Е21 - Е24, которая была затронута, и экран настройки для каждого настраиваемого элемента, отображаемый в окне Е20, переключается на экран настройки, соответствующий выбранным настраиваемым элементам. Следует отметить, что фиг. 11 показывает состояние, в котором в окне Е20 отображается экран Sc3 настройки условий испытания.
[0137] Вкладка Е21 связана с настраиваемыми значениями общих условий испытания, и при касании вкладки Е21 процесс настройки условий испытания переходит к подпрограмме настройки условий испытания для настройки общих условий испытания, и изображение окна Е20 переключается на экран Sc3 настройки условий испытания.
[0138] Вкладка Е22 связана с настраиваемыми значениями испытательной группы, и при касании вкладки Е22 процесс настройки условий испытания переходит к подпрограмме настройки испытательной группы для настройки испытательной группы, и изображение окна Е20 переключается на экран Sc4 настройки испытательной группы (фиг. 14).
[0139] Вкладка Е23 связана с настраиваемыми значениями испытательного блока, и при касании вкладки Е23 процесс настройки условий испытания переходит к подпрограмме настройки испытательного блока для настройки испытательного блока, и изображение окна е20 переключается на экран Sc5 настройки испытательного блока (фиг 15).
[0140] Вкладка Е24 связана с настраиваемыми значениями образца формы волны, и при касании вкладки Е24 процесс настройки условий испытания переходит к подпрограмме настройки образца формы волны для настройки образца формы волны, и изображение окна Е20 переключается на экран Sc6 настройки образца формы волны (фиг. 16).
[0141] Фиг. 12 является изображением, показывающим структуру вложенности модуля процесса. Фиг. 12(а) показывает пример с шестью типами образцов форм волн (образцов A - F форм волн), фиг. 12(b) показывает пример с двумя типами испытательных блоков (испытательные блоки G и H), и фиг. 12(с) показывает пример с двумя типами испытательных групп (испытательные группы I и J). Следует отметить, что образцы A - F форм волн, испытательные блоки G и H, и испытательные группы I и J настроены в таблице Е37 последовательности, показанной на фиг. 11, которая будет описана ниже. Каждый из испытательных блоков и испытательных групп состоит из множества модулей процесса более низкого порядка (образцов форм волн или блоков форм волн). Следует отметить, что на фиг. 12 и 13 включение «×n0» (где n0 является натуральным числом и называется «числом повторений») указывает на то, что модуль процесса подлежит последовательному выполнению n0 раз.
[0142] Как показано на фиг. 12(а), образец формы волны является модулем процесса самого низкого порядка (т.е., самой основной конфигурацией, которая не включает в себя другие модули процесса). Например, в случае циклического процесса, подпроцесс для одного цикла настраивается в виде образца формы волны. Следует отметить, что образец формы волны настоящего варианта осуществления определяет не только поведение одной цели управления (например, серводвигателя 21 приводной части 20 входной стороны), но и все поведение или часть поведения (подпроцесс) испытательного устройства 1.
[0143] Как показано на фиг. 12(b), испытательный блок состоит из множества модулей процесса более низкого порядка (т.е., образцов форм волн). Например, испытательный блок G состоит из четырех образцов форм волн (2 образцов А форм волн и 2 образцов В форм волн), и испытательный блок Н состоит из трех образцов форм волн (одного образца С формы волны и 2 образцов D форм волн). Следует отметить, что каждый из испытательных блоков G и Н состоит из образцов форм волн множества типов, но также можно составить испытательный блок из одного образца формы волны (с числом n0 повторений, большим или равным двум).
[0144] Как показано на фиг. 12(с), испытательная группа состоит из множества модулей процесса более низкого порядка (т.е., образцов форм волн или испытательных блоков), включающих в себя по меньшей мере один испытательный блок. Например, испытательная группа I состоит из одного испытательного блока G и двух образцов Е форм волн, и испытательная группа J состоит из одного образца А формы волны и двух испытательных блоков Н.
[0145] Как показано на фиг. 11, экран Sc3 настройки условий испытания включает в себя часть Е31 настройки режима испытания, часть Е32 настройки числа повторений испытательного цикла, часть Е33 настройки пружинной нагрузки, часть Е34 настройки функции обучения, часть Е35 настройки управления концевым упиранием, часть Е36 настройки процесса замедления, таблицу Е37 последовательности, и часть Е38 управления файлом условий испытания.
[0146] Часть Е31 настройки режима испытания является элементом для настройки режима испытания, описанного ниже. Часть Е31 настройки режима испытания настоящего варианта осуществления реализована в форме ниспадающего меню, посредством которого режим испытания, подлежащий применению, может быть выбран из режимов испытания 19 типов, которые будут описаны ниже.
[0147] В случае описанной выше аппаратной конфигурации, испытательное устройство 1 выполнено с возможностью осуществлять следующие пять входных воздействий (1) - (5) на образец W.
(1) Вращение вала W1 рулевого механизма (вращение входного вала)
(2) Приложение нагрузки L к левой поперечной рулевой тяге W4 (левая нагрузка)
(3) Приложение нагрузки L к правой поперечной рулевой тяге W4 (правая нагрузка)
(4) Колебание левой поперечной рулевой тяги W4 (левое колебание)
(5) Колебание правой поперечной рулевой тяги W4 (правое колебание)
[0148] Вышеупомянутый пункт (1) осуществляется посредством приведения в движение приводной части 20 входной стороны, вышеупомянутые пункты (2) и (3) осуществляются посредством приведения в движение серводвигателей 62 левой и правой приводных частей 60L и 60R выходной стороны, и вышеупомянутые пункты (4) и (5) осуществляются посредством приведения в движение серводвигателей 67 левой и правой приводных частей 60L и 60R выходной стороны.
[0149] Испытательное устройство 1 выполнено с возможностью осуществлять испытания в следующих 19 режимах (a) - (s) испытаний посредством комбинации входных воздействий (1) - (5).
(a) вращение входного вала
(b) левая нагрузка
(c) правая нагрузка
(d) левая нагрузка+правая нагрузка
(e) левое колебание
(f) правое колебание
(g) левое колебание+правое колебание
(h) вращение входного вала+левая нагрузка
(i) вращение входного вала+правая нагрузка
(j) вращение входного вала+левая нагрузка+правая нагрузка
(k) вращение входного вала+левое колебание
(l) вращение входного вала+правое колебание
(m) вращение входного вала+левое колебание+правое колебание
(n) вращение входного вала+левая нагрузка+левое колебание
(o) вращение входного вала+правая нагрузка+правое колебание
(p) вращение входного вала+левая нагрузка+правая нагрузка+левое колебание+правое колебание
(q) левая нагрузка+левое колебание
(r) правая нагрузка+правое колебание
(s) левая нагрузка+правая нагрузка+левое колебание+правое колебание
[0150] Часть Е32 настройки числа повторений испытательного цикла является элементом для настройки числа повторений испытательной последовательности (испытательного цикла), настраиваемой в таблице Е37 последовательности (далее называемого «числом повторений испытательного цикла»). Часть Е32 настройки числа повторений испытательного цикла настоящего варианта осуществления реализована в форме текстового поля, в которое может быть введено числовое значение, и выполнена с возможностью настраивать числовое значение, вводимое пользователем, в качестве числа повторений испытательного цикла.
[0151] Часть Е33 настройки пружинной нагрузки является элементом для настройки режима нагрузки (конкретно, соотношения между угловым положением θ20 вала W1 рулевого механизма и целевым значением RL нагрузки L), подлежащей использованию в процессе управления пружинной нагрузкой, который будет описан ниже. Файл режима нагрузки, в качестве файла, включающего в себя данные, указывающие на соотношение между угловым положением θ20 и нагрузкой L (например, функцию или таблицу числовых значений), запоминается заранее в памяти 824 управляющей части 82 или сервера SV и т.п., к которому управляющая часть 82 может получать доступ (далее называемой «памятью 824 и т.п.»). Часть Е33 настройки пружинной нагрузки настоящего варианта осуществления реализована в форме ниспадающего меню, в котором один или несколько файлов режима нагрузки настраиваются в качестве вариантов, и выполнена с возможностью настраивать режим нагрузки, включенный в файл режима нагрузки, выбранный пользователем.
[0152] Часть Е34 настройки функции обучения является элементом для настройки того, разблокировать ли функцию обучения, реализуемую процессом Sа20 управления нагрузкой, который будет описан ниже. Часть Е34 настройки функции обучения настоящего варианта осуществления реализована в форме ниспадающего меню, посредством которого можно выбрать «разблокировать» или «блокировать», и выполнена с возможностью настраивать разблокирование или блокирование функции обучения согласно выбору пользователя.
[0153] Часть Е35 настройки управления концевым упиранием является элементом для выполнения процессов настройки, связанных с процессом S9 управления концевым упиранием, который будет описан ниже. Часть Е35 настройки управления концевым упиранием включает в себя часть Е351 настройки разблокирования/ блокирования, которая настраивает, разблокировать ли процесс S9 управления концевым упиранием, и часть Е352 настройки угла определения концевого упирания в положительную сторону и часть Е353 настройки угла определения концевого упирания в отрицательную сторону, которые, соответственно, настраивают граничные значения диапазонов углов определения концевого упирания в положительную сторону и в отрицательную сторону. Конкретно, значение углового положения θ20 границы диапазона углов определения концевого упирания, когда вал W1 рулевого механизма вращается по часовой стрелке, настраивается частью Е352 настройки угла определения концевого упирания в положительную сторону, и значение углового положения θ20 границы диапазона углов определения концевого упирания, когда вал W1 рулевого механизма вращается против часовой стрелки, настраивается частью Е353 настройки угла определения концевого упирания в отрицательную сторону.
[0154] Часть Е351 разблокирования/блокирования настоящего варианта осуществления реализована в форме ниспадающего меню, посредством которого можно выбрать «разблокировать» или «блокировать», и выполнена с возможностью настраивать разблокирование и блокирование процесса управления концевым упиранием согласно выбору пользователя.
[0155] Дополнительно, часть Е352 настройки угла определения концевого упирания в положительную сторону и часть Е353 настройки угла определения концевого упирания в отрицательную сторону настоящего варианта осуществления реализованы в форме текстовых полей, в которые можно вводить числовые значения, и выполнены с возможностью настраивать числовые значения, вводимые пользователем, в качестве значений угловых положений θ20 границ в положительную сторону и в отрицательную сторону диапазона углов определения концевого упирания, соответственно.
[0156] Часть Е36 настройки процесса замедления является элементом для осуществления процессов настройки, связанных с процессом S22 замедления (процедурой замедления), который будет описан ниже. Часть Е36 настройки процесса замедления включает в себя часть Е361 настройки разблокирования/ блокирования для настройки того, разблокировать ли процесс S22 замедления, часть Е362 настройки начального коэффициента нагрузки для настройки начального коэффициента rS0 нагрузки, являющегося коэффициентом нагрузки в начале приведения в движение, и часть Е363 настройки числа замедлений для настройки числа NS замедлений. Следует отметить, что процесс S22 замедления является процессом постепенного увеличения нагрузки на начальной стадии процесса S20 управления нагрузкой, и коэффициент rS0 нагрузки является коэффициентом rS нагрузки (передаточным отношением нагрузки L), подлежащим применению в первом цикле управления. Коэффициент rS нагрузки является положительной десятичной дробью, меньшей или равной 1, и определяется как отношение целевого значения RL нагрузки L в случае, когда процесс S22 замедления применяется, к целевому значению RL нагрузки L в случае, когда процесс S22 замедления не применяется (т.е., передаточное отношение нагрузки L).
[0157] Часть Е361 настройки разблокирования/ блокирования настоящего варианта осуществления реализована в форме ниспадающего меню, посредством которого можно выбрать «разблокировать» или «блокировать», и выполнена с возможностью настраивать разблокирование или блокирование процесса замедления согласно выбору пользователя.
[0158] Часть Е362 настройки начального коэффициента нагрузки и часть Е363 настройки числа замедлений настоящего варианта осуществления реализованы в форме текстовых полей, посредством которых можно вводить числовые значения, и выполнены с возможностью настраивать числовые значения, вводимые пользователем, в качестве начального коэффициента rS0 нагрузки и числа NS замедлений, соответственно.
[0159] Один модуль процесса (испытательная группа, испытательный блок, или образец формы волны) настраивается в каждой строке таблицы Е37 последовательности, и модули процесса, настроенные в соответствующих строках, выполняются в порядке номеров (L1 - L4) строк таблицы Е37 последовательности.
[0160] Таблица Е37 последовательности включает в себя столбец Е371, в котором должны быть настроены номера (L1 - L4) строк, указывающие на порядок выполнения модулей процесса, столбец Е372, в котором должны быть настроены испытательные группы, столбец Е373, в котором должны быть настроены испытательные блоки, столбец Е374, в котором должны быть настроены образцы форм волн, столбец Е375, в котором должны быть настроены числа повторений (число повторений модулей процесса, подлежащих повторному выполнению), столбец Е376, в котором должны быть настроены сигналы настройки температуры, и столбец Е377, в котором должны быть настроены триггеры. Следует отметить, что в каждой строке таблицы Е37 последовательности должно быть настроено что-нибудь из испытательной группы (столбец Е372), испытательного блока (столбец Е373) и образца формы волны (столбец Е374).
[0161] Фиг. 13 является созданной таблицей последовательности, показывающей созданную последовательность, полученную посредством создания испытательной последовательности, настроенной в таблице Е37 последовательности, показанной на фиг. 11, для каждого образца формы волны. Номера L1 - L4 на фиг. 13 являются номерами строк, которые настроены в столбце Е371 таблицы Е37 последовательности, и указывают на порядок выполнения модулей процесса. Следует отметить, что конфигурации испытательных групп I и J и испытательного блока Н, включенных в эту испытательную последовательность, являются конфигурациями, которые показаны на фиг. 12. Образцы форм волн, образующие испытательную последовательность, выполняются в порядке номеров выполнения в созданной таблице последовательности.
[0162] Испытательное устройство 1 выполнено с возможностью функционировать совместно с внешними устройствами. Например, средство ED1 настройки температуры (фиг. 9), такое как печь постоянной температуры, для настройки температуры образца W, может быть соединена с испытательным устройством 1 для добавления функции настройки температуры испытательному устройству 1. В случае необходимости использования средства ED1 настройки температуры, сигнал настройки температуры для управления средством ED1 настройки температуры настраивается в столбце Е376.
[0163] Триггер (столбец Е377) также является настраиваемым элементом для функционирования совместно с внешними устройствами. Модуль процесса в строке, для которой настроен триггер, выполняется в ответ на обнаружение запускающего сигнала от внешнего устройства (или запускающего сигнала, генерируемого внутренним процессом испытательного устройства 1). Например, при настройке температуры средством ED1 настройки температуры, средство ED1 настройки температуры может быть настроено таким образом, чтобы средство ED1 настройки температуры генерировало запускающий сигнал, когда температура достигает настроенной температуры, и триггер может быть настроен в таблице Е37 последовательности таким образом, чтобы модуль процесса выполнялся в ответ на обнаружение этого запускающего сигнала управляющей частью 82. Это позволяет надежно выполнять испытание при правильных температурных условиях.
[0164] Часть Е38 управления файлом условий испытания включает в себя часть Е381 отображения файловой информации, кнопку Е382 сохранения альтернативного имени, кнопку Е383 сохранения перезаписи, и кнопку Е384 отмены. Часть Е381 отображения файловой информации отображает информацию о применяемом файле условий испытания (например, путь к файлу условий испытания). Условия испытания, настроенные на экране Sc3 настройки условий испытания, запоминаются в файле условий испытания. При касании кнопки Е382 сохранения альтернативного имени, файл условий испытания, запоминающий условия испытания и настраиваемый в это время, генерируется вновь и сохраняется в памяти 824 и т.п. При касании кнопки Е383 сохранения перезаписи, содержимое применяемого файла условий испытания обновляется (перезаписывается и сохраняется). При касании кнопки Е384 отмены, настраиваемые условия испытания не сохраняются, и процесс настройки условий испытания заканчивается.
[0165] В настоящем варианте осуществления, каждая из части Е31 настройки режима испытания, части Е33 настройки пружинной нагрузки, и части Е34 настройки функции обучения реализована в форме ниспадающего меню, но может быть реализована в форме элемента другого типа, такого как виджет (т.е., GUI-компонента, конфигурирующего графический пользовательский интерфейс), посредством которого целевой элемент может быть выбран из множества элементов (например, кнопки-переключатели, окна списков и т.п.). Дополнительно, поскольку часть Е34 настройки функции обучения, часть Е351 разблокирования/ блокирования части Е35 настройки управления концевым упиранием, и часть Е361 настройки разблокирования/ блокирования части Е36 настройки процесса замедления являются средствами для приема ввода либо «разблокировать», либо «блокировать», они могут быть также реализованы в форме элемента другого типа, выполненного с возможностью принимать ввод двух значений, такого как, например, кнопка-флажок или кнопка-переключатель.
[0166] В настоящем варианте осуществления, каждая из части Е32 настройки числа повторений испытательного цикла, части Е352 настройки угла определения концевого упирания в положительную сторону, части Е353 настройки угла определения концевого упирания в отрицательную сторону, части Е362 настройки начального коэффициента нагрузки, и части Е363 настройки числа замедлений реализована в форме текстового поля, но может быть реализована в форме элемента другого типа (например, бегунка, наборного счетчика, и т.п.), в который может быть введено числовое значение.
[0167] Фиг. 14 является схематичным изображением экрана Sc2 настройки, в котором в окне Е20 отображается экран Sc4 настройки испытательной группы, который отображается во время подпрограммы настройки испытательной группы.
[0168] Экран Sc4 настройки испытательной группы включает в себя список Е41 испытательных групп и таблицу Е42 испытательной группы. В списке Е41 испытательных групп отображается список зарегистрированных испытательных групп. В списке Е41 испытательных групп выбранная испытательная группа выделяется (фон отображается черным цветом). В таблице Е42 испытательной группы отображается содержимое испытательной группы, выбранной в списке Е41 испытательных групп. Испытательная группа может быть отредактирована (настроена) в таблице Е42 испытательной группы.
[0169] Список Е41 испытательных групп сопровождается парой кнопок Е411 стрелок вверх и вниз, кнопкой Е412 обновления, кнопкой Е413 добавления, и кнопкой Е414 удаления. При касании кнопки Е411 стрелки, выбор испытательной группы в списке Е41 испытательных групп переключается в направлении стрелки. При касании кнопки Е412 обновления, содержимое настройки испытательной группы обновляется в соответствии с содержимым настройки, редактируемым в таблице Е42 испытательной группы. При касании кнопки Е413 добавления, содержимое настройки, редактируемое в таблице Е42 испытательной группы, дополнительно регистрируется в качестве новой испытательной группы. При касании кнопки Е414 удаления, регистрация выбранной испытательной группы удаляется.
[0170] Один модуль процесса (испытательный блок или образец формы волны) настраивается в каждой строке таблицы Е42 испытательной группы. Модули процесса, настроенные в соответствующих строках, выполняются в порядке номеров (M1, M2) строк таблицы Е42 испытательной группы.
[0171] Таблица Е42 испытательной группы включает в себя столбец Е421, в котором должны быть настроены номера (М1 и М2) строк, указывающие на порядок выполнения модулей процесса, столбец Е422, в котором должны быть настроены испытательные блоки, столбец Е423, в котором должны быть настроены образцы форм волн, столбец Е424, в котором должны быть настроены числа повторений, столбец Е425, в котором должны быть настроены сигналы настройки температуры, и столбец Е426, в котором должны быть настроены триггеры. Следует отметить, что один из испытательного блока (столбец Е422) и образца формы волны (столбец Е423) должен быть настроен в каждой строке таблицы Е42 испытательной группы.
[0172] Фиг. 15 является схематичным изображением экрана Sc2 настройки, в котором в окне Е20 отображается экран Sc5 настройки испытательного блока, который отображается во время подпрограммы настройки испытательного блока.
[0173] Экран Sc5 настройки испытательного блока включает в себя список Е51 испытательных блоков и таблицу Е52 испытательного блока. В списке Е51 испытательных блоков отображается список зарегистрированных испытательных блоков. В списке Е51 испытательных блоков выбранный испытательный блок выделяется. В таблице Е52 испытательного блока отображается содержимое настройки испытательного блока, выбранного в списке Е51 испытательных блоков. Испытательный блок может быть отредактирован (настроен) в таблице Е52 испытательного блока.
[0174] Список Е51 испытательных блоков сопровождается парой кнопок Е511 стрелок вверх и вниз, кнопкой Е512 обновления, кнопкой Е513 добавления, и кнопкой Е514 удаления. При касании кнопки Е511 стрелки, выбор испытательного блока в списке Е51 испытательных блоков переключается в направлении стрелки. При касании кнопки Е512 обновления, содержимое настройки испытательного блока обновляется в соответствии с содержимым настройки, редактируемым в таблице Е52 испытательного блока. При касании кнопки Е513 добавления, содержимое настройки, редактируемое в таблице Е52 испытательного блока, дополнительно регистрируется в качестве нового испытательного блока. При касании кнопки Е514 удаления, регистрация выбранного испытательного блока удаляется.
[0175] Образец формы волны одного типа настраивается в каждой строке таблицы Е52 испытательного блока, и образцы форм волн, настроенные в соответствующих строках, выполняются в порядке номеров (N1, N2) строк таблицы Е52 испытательного блока.
[0176] Таблица Е52 испытательного блока включает в себя столбец Е521, в котором должны быть настроены номера (N1, N2) строк, указывающие на порядок выполнения образцов форм волн, столбец Е522, в котором должны быть настроены образцы форм волн, и столбец Е523, в котором должны быть настроены числа повторений.
[0177] Фиг. 16 является схематичным изображением экрана Sc2 настройки, в котором в окне Е20 отображается экран Sc6 настройки образца формы волны, который отображается во время выполнения подпрограммы настройки образца формы волны.
[0178] Экран Sc6 настройки образца формы волны включает в себя список Е61 образцов форм волн, таблицу Е62 образца формы волны, и средство Е63 просмотра образца формы волны. В списке Е61 образцов форм волн отображается список зарегистрированных образцов форм волн. В списке Е61 образцов форм волн выбранный образец формы волны выделяется. В таблице Е62 образца формы волны отображается содержимое настройки образца формы волны, выбранного в списке Е61 образцов форм волн. В средстве Е63 просмотра образца формы волны графически отображается образец формы волны, выбранный в списке Е61 образцов форм волн.
[0179] В качестве образца формы волны для использования в испытании настраивается по меньшей мере одна из испытательной формы волны входного вала (далее сокращенно называемой «формой волны входного вала»), испытательной формы волны нагрузки левой стороны (далее сокращенно называемой «формой волны левой нагрузки»), испытательной формы волны нагрузки правой стороны (далее сокращенно называемой «формой волны правой нагрузки»), испытательной формы волны колебания левой стороны (далее сокращенно называемой «формой волны левого колебания»), и испытательной формы волны колебания правой стороны (далее сокращенно называемой «формой волны правого колебания»). Форма волны входного вала является данными о форме волны, представляющими изменение с течением времени углового положения θ20 выходного вала приводной части 20 входной стороны (т.е., патрона 24).
[0180] Форма волны левой нагрузки [форма волны правой нагрузки] является данными о форме волны, представляющими изменение с течением времени нагрузки L, подлежащей приложению к поперечной рулевой тяге W4 на левой стороне [правой стороне] образца W приводной частью 60L [60R] выходной стороны. Форма волны левого колебания [форма волны правого колебания] является данными о форме волны, представляющими изменение с течением времени вертикального смещения D, подлежащего применению к концу W41 поперечной рулевой тяги на левой стороне [правой стороне] образца W приводной частью 60L [60R] выходной стороны. В средстве Е63 просмотра образца формы волны отображается по меньшей мере одна испытательная форма волны, настроенная в качестве образца формы волны. Следует отметить, что в образцах форм волн, показанных на фиг. 16, настраивается форма волны входного вала, форма волны левой нагрузки и форма волны правой нагрузки, и эти 3 испытательные формы волн отображаются в средстве Е63 просмотра образца формы волны.
[0181] Следует отметить, что в каждой испытательной форме волны, «точка управления», которая является параметром, соответствующим времени, и «амплитуда», которая является параметром, соответствующим каждой управляемой переменной, связаны друг с другом, и каждая испытательная форма волны настраивается в форме таблицы числовых значений, функции или идентификационного номера формы волны (далее сокращенно называемого «идентификатором (ID) формы волны»). Идентификатор формы волны является уникальным идентификационным номером, присвоенным каждой основной форме волны, зарегистрированной заранее (или регистрируемой пользователем форме волны, регистрируемой пользователем).
[0182] Список Е61 образцов форм волн сопровождается парой кнопок Е611 стрелок вверх и вниз, кнопкой Е612 редактирования, кнопкой Е613 добавления, и кнопкой Е614 удаления. При касании кнопки Е611 стрелки, выбор образца формы волны в списке Е61 образцов форм волн переключается в направлении стрелки. При касании кнопки Е612 редактирования, отображается экран Sc7 редактирования образца формы волны (фиг. 17), и становится возможным редактировать выбранный образец формы волны. При касании кнопки Е613 добавления, дополнительно регистрируется новый образец формы волны, и, при касании кнопки Е614 удаления, регистрация выбранного образца формы волны удаляется.
[0183] Фиг. 17 является схематичным изображением экрана Sc7 редактирования образца формы волны. Экран Sc7 редактирования образца формы волны включает в себя часть Е71 настройки формы волны входного вала для настройки формы волны входного вала, часть Е72 настройки формы волны левой нагрузки для настройки формы волны левой нагрузки, часть Е73 настройки формы волны правой нагрузки для настройки формы волны правой нагрузки, часть Е74 настройки формы волны левого колебания для настройки формы волны левого колебания, часть Е75 настройки формы волны правого колебания для настройки формы волны правого колебания, и кнопку Е76 настройки пределов. Части Е71 - Е76 настройки, соответственно, включают в себя средства G71 - G75 просмотра форм волн, которые графически отображают настраиваемые испытательные формы волн.
[0184] Фиг. 18 является схематичным изображением экрана Sc8 настройки пределов, который отображается при касании кнопки Е76 настройки пределов (фиг. 17). Экран Sc8 настройки пределов включает в себя часть Е81 настройки пределов входного вала для настройки пределов, связанных с вращением входного вала, часть Е82 настройки пределов левой нагрузки для настройки пределов, связанных с левой нагрузкой, и часть Е83 настройки пределов правой нагрузки для настройки пределов, связанных с правой нагрузкой. Следует отметить, что когда форма волны левого колебания или форма волны правого колебания настраивается на экране Sc7 редактирования образца формы волны (фиг. 17), часть настройки левого колебания или часть настройки правого колебания для настройки пределов, относящихся к левому колебанию или правому колебанию, дополнительно обеспечиваются на экране Sc8 настройки пределов.
[0185] Настоящий вариант осуществления сконфигурирован таким образом, что предел может быть настроен в двух стадиях для каждого входного воздействия. Пределы первой стадии (далее называемой «первым уровнем пределов») являются глобальными пределами, которые применяются на протяжении всего времени испытания (т.е., применяются всегда во время испытания), и пределы второй стадии (далее называемой «вторым уровнем пределов») являются локальными пределами, которые применяются ограниченно в течение заданного интервала времени. Посредством настройки пределов в двух стадиях, описанных выше, поскольку становится возможным точно настроить пределы согласно условиям испытания (образцу формы волны), которые изменяются в зависимости от времени (точки управления), становится возможным более надежно предотвратить ухудшение достоверности результата испытания из-за неожиданной избыточной нагрузки, прикладываемой к образцу W.
[0186] Часть Е83 настройки пределов правой нагрузки включает в себя часть E83G настройки глобальных пределов для настройки глобальных пределов и часть E83L настройки локальных пределов для настройки локальных пределов.
[0187] Часть E83G настройки глобальных пределов включает в себя часть E83GP настройки глобальных пределов углового положения для настройки глобальных пределов углового положения θ60 подвижного основания 66 приводной части 60R выходной стороны, и часть E83GL настройки глобальных пределов нагрузки для настройки глобальных пределов нагрузки L, подлежащей приложению к образцу приводной частью 60R выходной стороны.
[0188] Часть E83GP настройки глобальных пределов углового положения включает в себя часть E83GPU настройки максимального значения для настройки максимального значения углового положения θ60, часть E83GPL настройки минимального значения для настройки минимального значения углового положения θ60, и кнопки-флажки E83GPC (части настройки разблокирования) для настройки разблокирования и блокирования соответствующих настраиваемых элементов (максимального значения и минимального значения).
[0189] Подобно части E83GP настройки глобальных пределов углового положения, часть E83GL настройки глобальных пределов нагрузки включает в себя часть E83GLU настройки максимального значения для настройки максимального значения нагрузки L, часть EG83GLL настройки минимального значения для настройки минимального значения нагрузки L, и кнопки-флажки E83GLC для настройки разблокирования и блокирования соответствующих настраиваемых элементов.
[0190] Часть E83L настройки локальных пределов включает в себя часть E83LL настройки локальных пределов нагрузки для настройки локальных пределов нагрузки L. Часть E83LL настройки локальных пределов нагрузки включает в себя кнопки-флажки E83LLC для настройки разблокирования и блокирования соответствующих настраиваемых элементов, часть E83LLS настройки начальной точки для настройки начальной точки секции испытания (времени) для настройки локальных пределов, часть E83LLE настройки конечной точки для настройки конечной точки секции испытания, часть E83LLU настройки максимального значения для настройки максимального значения нагрузки L, часть E83LLL настройки минимального значения для настройки минимального значения нагрузки L, и часть E83LLD настройки числа эталонных обнаружений для настройки эталонного числа обнаружений. Часть E83L настройки локальных пределов выполнена с возможностью настраивать локальный предел для одной или нескольких секций испытания (на экране Sc8 настройки пределов фиг. 18, трех секций). Следует отметить, что начальная точка и конечная точка, вводимые в «секундах» в части E83LLS настройки начальной точки и части E83LLE настройки конечной точки, преобразуются в соответствующие точки управления на основе времени выборки, настраиваемого в таблице Е62 образцов форм волн экрана Sc6 настройки образцов форм волн (фиг. 16).
[0191] Предельные значения (максимальное значение и минимальное значение) локальных пределов настраиваются между максимальным значением и минимальным значением глобальных пределов. При превышении максимального значения или минимального значения глобальных пределов испытание стазу же прекращается. С другой стороны, испытание прекращается только тогда, когда максимальное значение или минимальное значение локальных пределов превышается непрерывно для эталонного числа обнаружений. Дополнительно, программа 824с испытания выполнена с возможностью стазу же останавливать функционирование испытательного устройства 1 даже в середине испытательного цикла, когда измеренное значение превышает максимальное значение или минимальное значение глобальных пределов, но выполнена с возможностью останавливать функционирование испытательного устройства 1 после завершения испытательного цикла, когда измеренное значение превышает максимальное значение или минимальное значение локальных пределов непрерывно для эталонного числа обнаружений.
[0192] Глобальные пределы являются предельными значениями, настраиваемыми, главным образом, с целью обнаруживать аномальности, такие как ошибки установки образца W и повреждение испытательного устройства 1, и локальные пределы являются предельными значениями, настраиваемыми, главным образом, с целью обнаруживать повреждение образца W вследствие усталости. Во многих случаях, повреждение образца W вследствие усталости постепенно прогрессирует, и, таким образом, во многих случаях поведение образца W становится нестабильным до полного отказа образца W, и значение измерения во времени указывает на аномальное значение. Дополнительно, когда образец W полностью разрушается, измеряемое значение непрерывно показывает аномальные значения в течение некоторого времени. С использованием этого знания, настоящий вариант осуществления сконфигурирован таким образом, что когда измеряемое значение превышает максимальное значение или минимальное значение локальных пределов непрерывно для эталонного числа обнаружений, определяют, что образец W повредился, и испытание автоматически заканчивается. В случае этой конфигурации, поскольку испытание автоматически заканчивается, когда образец W разрушается во время испытания, предотвращается ненужное продолжение испытания после разрушения образца W. Дополнительно, предотвращается прерывание испытания до повреждения образца W.
[0193] Дополнительно, когда образец W разрушается при испытании, во многих случаях аномальность возникает в то время, когда большая нагрузка прикладывается к образцу W, но образец W функционирует нормально, когда нагрузка мала. Однако, когда образец W разрушается, аномальность часто возникает даже тогда, когда нагрузка мала. Таким образом, посредством настройки локального предела в то время, когда нагрузка, прикладываемая к образцу W, мала (т.е., маловероятно, что аномальность значения измерения возникнет до повреждения), можно более точно обнаруживать возникновение повреждения.
[0194] Настоящий вариант осуществления сконфигурирован таким образом, что, в части E83LLU настройки максимального значения и части E83LLL настройки минимального значения локальные пределы (максимальное значение и минимальное значение) нагрузки L могут быть настроены не как абсолютные значения, а как относительные значения (в %) относительно глобальных пределов (максимального значения и минимального значения) нагрузки L, настроенных в части E83GLU настройки максимального значения и части EG83GLL настройки минимального значения части E83GL настройки глобальных пределов нагрузки, соответственно. В случае этой конфигурации, когда настройка глобальных пределов нагрузки L изменяется, локальные пределы нагрузки L автоматически изменяются до соответствующих величин. Таким образом, нет необходимости последовательно изменять настройку локальных пределов нагрузки L, и сложная настройка пределов упрощается.
[0195] Поскольку часть Е82 настройки пределов левой нагрузки и часть Е83 настройки пределов правой нагрузки, описанные выше, имеют общую конфигурацию, описание части Е82 настройки пределов левой нагрузки здесь опущено.
[0196] Часть Е81 настройки пределов входного вала включает в себя часть E81G настройки глобальных пределов для настройки глобальных пределов и часть E81L настройки локальных пределов для настройки локальных пределов.
[0197] Часть E81G настройки глобальных пределов включает в себя часть E81GP настройки глобальных пределов углового положения для настройки глобальных пределов углового положения θ20 выходного вала приводной части 20 входной стороны (т.е., углового положения θ20 вала W1 рулевого механизма образца W), и часть E81GT настройки глобальных пределов крутящего момента для настройки глобальных пределов крутящего момента Т, подлежащего приложению к выходному валу приводной части 20 входной стороны. Поскольку конфигурации части E81GP настройки глобальных пределов углового положения и части E81GT настройки глобальных пределов крутящего момента подобны конфигурациям части E83GP настройки глобальных пределов углового положения и части E83GL настройки глобальных пределов нагрузки части Е83 настройки пределов правой нагрузки, описанной выше, их описания здесь опущены.
[0198] Часть E81L настройки локальных пределов включает в себя часть Е81LP настройки локальных пределов углового положения для настройки локальных пределов, относящихся к угловому положению θ20 приводной части 20 входной стороны, и часть E81LT настройки локальных пределов крутящего момента для настройки локальных пределов, относящихся к крутящему моменту Т приводной части 20 входной стороны. Конфигурации части 81LP настройки локальных пределов углового положения и части E81LT настройки локальных пределов крутящего момента подобны конфигурации части E83LL настройки локальных пределов нагрузки части Е83 настройки пределов правой нагрузки, описанной выше, и поэтому их описания здесь опущены.
[0199] Далее будут описаны процессы, выполняемые испытательным устройством 1 при выполнении испытания на надежность рулевого механизма.
[0200] Фиг. 19 является блок-схемой последовательности операций, показывающей процедуру испытания на надежность рулевого механизма с использованием испытательного устройства 1. Следует отметить, что процессы от процесса S1 инициализации до процесса S6 обнаружения передаточного отношения, описанные ниже, являются подготовительными процессами перед основным испытанием, и процессы после процесса S7 являются процессами для основного испытания.
[0201] При касании кнопки Е11 начала испытания на экране Sc1 меню (фиг. 10), отображаемом на сенсорном экране, испытание на надежность начинается, и сначала выполняется процесс S1 инициализации испытательного устройства 1. В процессе S1 инициализации, считываются различные настроенные значения, подлежащие использованию испытательным устройством 1 для управления и измерения. Дополнительно, каждая подвижная часть испытательного устройства 1 возвращается в начало отсчета и перемещается в начальное положение. После завершения процесса S1 инициализации, образец W прикрепляют к испытательному устройству 1.
[0202] (Процесс проверки полярности)
После прикрепления образца W к испытательному устройству 1, выполняют процесс S2 проверки полярности.
[0203] Соотношение между направлением вращения вала W1 рулевого механизма и направлением перемещения поперечной рулевой тяги W4 изменяется в зависимости от типа образца W. Например, так называемый рулевой механизм с «передним рулевым устройством», в котором поперечная рулевая тяга W4 соединена с поворотным кулаком перед осью, сконфигурирован таким образом, что поперечная рулевая тяга W4 перемещается вправо (в отрицательном направлении оси Y), когда рулевое колесо вращается в прямом направлении (по часовой стрелке (clockwise - CW)), и поперечная рулевая тяга W4 перемещается влево (в положительном направлении оси Y), когда рулевое колесо вращается в обратном направлении (против часовой стрелки (counterclockwise - CCW)). Так называемый рулевой механизм с «задним рулевым устройством», в котором поперечная рулевая тяга W4 соединена с поворотным кулаком за осью, сконфигурирован таким образом, что поперечная рулевая тяга W4 перемещается влево, когда рулевое колесо вращается в прямом направлении, и поперечная рулевая тяга W4 перемещается вправо, когда рулевое колесо вращается в обратном направлении. В этом описании изобретения, такое соотношение между направлением вращения вала W1 рулевого механизма и направлением перемещения поперечной рулевой тяги W4 называется полярностью рулевого механизма (образца W). Полярность рулевого механизма для «переднего рулевого устройства» называется положительной полярностью, и полярность рулевого механизма для «заднего рулевого устройства» называется отрицательной полярностью.
[0204] Дополнительно, как описано выше, подвижное основание 66 приводной части 60 выходной стороны снабжено парой рычагов 661 (передний рычаг 661f и задний рычаг 661r) для прикрепления конца W41 поперечной рулевой тяги образца W в двух положениях перед и за осью вращения подвижного основания 66, и соотношение между направлением перемещения поперечной рулевой тяги W4 и направлением вращения подвижного основания 66 зависит от того, с каким из рычагов 661 (соединительных частей поперечной рулевой тяги) соединена поперечная рулевая тяга W4. А именно, соотношение между направлением вращения вала W1 рулевого механизма образца W и направлением вращения подвижного основания 66 приводной части 60 выходной стороны (или направлением перемещения поперечной рулевой тяги W4) (т.е., полярность всей испытательной системы, которая далее называется «полярностью системы») отличается в зависимости от типа образца W и от того, с каким из рычагов 661 (передним рычагом 661f или задним рычагом 661r) соединена поперечная рулевая тяга W4.
[0205] Полярность системы настраивается заранее в качестве условия испытания. Однако, если полярность системы настроена ошибочно, то избыточная нагрузка L действует на образец W, и образец W может быть поврежден. Таким образом, процесс S2 проверки полярности для подтверждения того, что настройка полярности системы является правильной, выполняется до испытания.
[0206] Фиг. 20 является блок-схемой последовательности операций, показывающей процедуру процесса S2 проверки полярности. В процессе S2 проверки полярности, сначала максимальное значение нагрузки L уменьшают до малого значения (например, 5 кН), которое не влияет на образец W (S201). Поскольку приводная часть 60 выходной стороны функционирует таким образом, чтобы не превысить настроенное максимальное значение нагрузки L, при выполнении процесса S201, даже когда полярность системы настроена ошибочно, может быть предотвращено повреждение или разрушение образца W.
[0207] Затем считывают нагрузку L, обнаруживаемую датчиком 662 силы, обеспеченным на подвижном столе 66 приводной части 60 выходной стороны (S202). Затем приводят в движение серводвигатель 21 приводной части 20 входной стороны, приводят во вращательное движение вал W1 рулевого механизма образца W на заданный угол (например, около 20-30 градусов) в прямом направлении (S203), и снова считывают нагрузку L, обнаруживаемую датчиком 662 силы после приведения во вращательное движение (S204). После процесса S204 измерения нагрузки, вал W1 рулевого механизма образца W приводится во вращательное движение в обратном направлении (против часовой стрелки, CCW) на тот же самый угол, что и угол в процессе S203 приведения в движение по часовой стрелке (CW), приводной частью 20 входной стороны для настройки обратно в начальное угловое положение (S205), и затем максимальное значение нагрузки L настраивают обратно на настроенное значение до изменения в процессе S201 (S206). Затем определяют, совпадает ли изменение (увеличение или уменьшение) нагрузки L до и после процесса S203 приведения в движение по часовой стрелке с заданной полярностью системы (S207), и когда оно не совпадает (S207: НЕТ), выдают предупредительный сигнал, указывающий на то, что настроенное значение полярности системы (т.е., полярности образца W или установочного положения поперечной рулевой тяги W4 образца W) является неправильным (S208), и испытание на надежность прекращают. Когда изменение измеряемого значения нагрузки L совпадает с настроенным значением полярности образца W (S207: ДА), процесс S2 проверки полярности заканчивается, и процесс переходит к следующему процессу S3 (фиг. 19).
[0208] (Процесс центрирования)
Затем подтверждают, предназначена ли настройка для выполнения процесса S4 центрирования образца W (S3). Процесс S4 центрирования является процессом для автоматической проверки и настройки диапазона углового положения θ20, в пределах которого вал W1 рулевого механизма образца W может вращаться (диапазона движения), и центрального положения θС этого диапазона. Когда диапазон движения образца W не настроен, процесс S4 центрирования разблокируется (включается), и когда диапазон движения образца W известен, диапазон движения вводится заранее, и процесс S4 центрирования блокируется (выключается). Когда процесс центрирования разблокирован (включен) (S3: Да), выполняется процесс S4 центрирования, и когда процесс S4 центрирования блокирован (выключен) (S3: НЕТ), процесс S4 центрирования пропускается, и процесс переходит к следующему процессу S5.
[0209] Фиг. 21 является блок-схемой последовательности операций, показывающей процедуру процесса S4 центрирования. В процессе S4 центрирования, сначала выполняется процесс S401 управления приведением в движение. В процессе S401 управления приведением в движение, при контроле крутящего момента Т вала W1 рулевого механизма, обнаруживаемого датчиком 23 крутящего момента приводной части 20 входной стороны, вал W1 рулевого механизма образца W медленно приводится во вращательное движение приводной частью 20 входной стороны с постоянной скоростью в настроенном направлении приведения в движение (например, по часовой стрелке) до тех пор, пока величина крутящего момента Т не увеличится (конкретно, до тех пор, пока крутящий момент Т не превысит эталонное значение τ) (S4011 - S4014) [этап однонаправленного приведения в движение].
[0210] Угловая скорость ω20 вала W1 рулевого механизма в процессе S401 управления приведением в движение настраивается на такую величину, что крутящий момент Т, превышающий допустимый крутящий момент образца W, не генерируется до тех пор, пока приведение в движение не прекратится, после обнаружения крутящего момента Т, превышающего эталонное значение τ. Например, угловая скорость ω20 вала W1 рулевого механизма настраивается таким образом, что величина увеличения крутящего момента Т (величина увеличения измеряемого значения до и после превышения эталонного значения τ), когда образец W достигает конца диапазона движения (положения концевого упирания, которое будет описано ниже), становится меньшей или равной эталонному значению τ.
[0211] Дополнительно, эталонное значение τ крутящего момента Т является малым значением в том смысле, что образец W не повреждается, даже если крутящий момент Т будет повторно прикладываться к образцу W. В настоящем варианте осуществления, эталонное значение τ настраивается на значение, большее максимального значения крутящего момента Т, обнаруживаемого, когда вал W1 рулевого механизма вращается в состоянии, в котором образец W не достиг положения концевого упирания (более конкретно, например, на значение, большее среднего значения крутящего момента Т, обнаруживаемого, когда вал W1 рулевого механизма вращается в состоянии, в котором образец W не достиг положения концевого упирания, на утроенное среднее квадратичное отклонение или большую величину).
[0212] Когда величина крутящего момента Т становится большей или равной эталонному значению τ (S4013: ДА), приведение в движение вала W1 рулевого механизма останавливают (S4014), и процесс S401 управления приведением в движение заканчивается. Затем, значение θА углового положения θ20 вала W1 рулевого механизма, когда величина крутящего момента Т достигает эталонного значения τ в первом процессе S401 управления приведением в движение, обнаруживают и запоминают (S402) [первый этап обнаружения концевого упирания]. Следует отметить, что угловое положение вала W1 рулевого механизма (т.е., угловое положение θ20 приводной части 20 входной стороны) вычисляют на основании значения, обнаруживаемого кодером RE поворота, встроенным в серводвигатель 21 приводной части 20 входной стороны (т.е., углового положения Θ21 вала серводвигателя 21), и передаточного отношения r22 редуктора 22 скорости.
[0213] Затем, направление приведения в движение вала W1 рулевого механизма переключают на противоположное направление (например, против часовой стрелки) (S403), и процесс S401 управления приведением в движение выполняют снова [этап приведения в движение в обратном направлении]. Затем, когда величина крутящего момента Т становится большей или равной эталонному значению τ в процессе S401 управления приведением в движение в обратном направлении (S4013: ДА), приведение в движение останавливают (S4014), и значение θВ углового положения θ20 вала W1 рулевого механизма в это время обнаруживают и запоминают (S404) [второй этап обнаружения положения концевого упирания].
[0214] Затем посредством следующего уравнения (1) вычисляют центральное положение θС, которое является центром диапазона движения вала W1 рулевого механизма (S405) [этап вычисления центрального положения], и результат вычисления запоминают (S406). Затем угловое положение вала W1 рулевого механизма перемещают в центральное положение θС (S407) [этап перемещения центрального положения], и процесс S4 центрирования заканчивается.
[0215] Следует отметить, что когда угловое положение θ20 вала W1 рулевого механизма образца W достигает конца диапазона движения, образец W находится в состоянии, в котором конец рейки (более конкретно, стопор, обеспеченный на конце рейки) упирается в картер W3 рулевого механизма (далее называемом «состоянием концевого упирания»). В этом описании изобретения, угловое положение вала W1 рулевого механизма в состоянии концевого упирания называется положением концевого упирания. Когда вал W1 рулевого механизма, приводимый во вращательное движение с постоянной угловой скоростью ω20, достигает положения концевого упирания, поскольку вращение вала W1 рулевого механизма предотвращается, крутящий момент Т быстро увеличивается и превышает эталонное значение τ. А именно, в процессе S4 центрирования обнаруживаются положения θА и θВ концевого упирания образца W, и центральное положение θС настраивается посередине между положениями θА и θВ концевого упирания.
[0216] (Процесс обнаружения передаточного отношения скорости)
Затем определяют, разблокирован ли (включен ли) процесс S6 обнаружения передаточного отношения (S5).
[0217] Процесс S6 обнаружения передаточного отношения скорости является процессом для автоматического обнаружения и настройки отношения (далее называемого «передаточным отношением Tr скорости») угла поворота подвижного основания 66, соответствующего поворотному кулаку (т.е., величины Δθ60 изменения углового положения подвижного основания 66 приводной части 60 выходной стороны) относительно угла поворота вала W1 рулевого механизма образца W (т.е., величины Δθ20 изменения углового положения приводной части 20 входной стороны). Передаточное отношение Tr скорости является параметром, эквивалентным передаточному числу рулевого механизма. Передаточное отношение Tr скорости необходимо при определении управляемой переменной приводной части 60 выходной стороны. Образец W может приводиться во вращательное движение без изменения нагрузки L, действующей на образец W, посредством приведения во вращательное движение подвижного стола 66 приводной части 60 выходной стороны на величину, получаемую умножением величины приведения в движение вала W1 рулевого механизма приводной частью 20 входной стороны (угловой скорости ω20 или угла Δθ20 поворота) на передаточное отношение Tr скорости. Когда передаточное отношение Tr скорости образца W не настроено, процесс S6 обнаружения передаточного отношения скорости разблокируют (включают), и когда передаточное отношение Tr скорости образца W настроено, процесс S6 обнаружения передаточного отношения скорости блокируют (выключают). Следует отметить, что процесс S6 обнаружения передаточного отношения скорости настоящего варианта осуществления адаптирован к рулевому механизму с переменным передаточным отношением (variable gear ratio - VGR), передаточное отношение которого изменяется согласно угловому положению θ20 вала W1 рулевого механизма. Когда тип образца W настроен на VGR, процесс S6 обнаружения передаточного отношения скорости автоматически разблокируется.
[0218] Когда процесс S6 обнаружения передаточного отношения разблокируется (включается) в процессе S5 (фиг. 19) (S5: ДА), выполняется процесс S6 обнаружения передаточного отношения, и когда процесс S6 обнаружения передаточного отношения блокируется (выключается) в процессе S5 (фиг. 19) (S5: НЕТ), процесс S6 обнаружения передаточного отношения пропускается, и процесс переходит к следующему процессу S7.
[0219] Фиг. 22 является блок-схемой последовательности операций, показывающей процедуру процесса S6 обнаружения передаточного отношения. В процессе S6 обнаружения передаточного отношения скорости сначала целевое значение RL настраивают на ноль (нагрузка отсутствует) (S601), и начинается процесс управления нагрузкой посредством приводной части 60 выходной стороны (S602). В этой конфигурации, функционирование приводной части 60 выходной стороны может быть обеспечено таким образом, чтобы она автоматически следовала за перемещением поперечной рулевой тяги W4 образца W в состоянии отсутствия нагрузки. Процесс управления нагрузкой продолжается до тех пор, пока не закончится процесс S6 обнаружения передаточного отношения.
[0220] Затем вал W1 рулевого механизма приводится во вращательное движение приводной частью 20 входной стороны вплоть до одного положения θА концевого упирания (S603), и получают угловое положение θ60 подвижного основания 66 приводной части 60 выходной стороны в положении θА концевого упирания (S604). Следует отметить, что угловое положение θ60 приводной части 60 выходной стороны вычисляют на основании значения, обнаруживаемого кодером RE поворота, встроенным в серводвигатель 62 приводной части 60 выходной стороны (углового положения Θ62 вала серводвигателя 62), и передаточного отношения r63 редуктора 63 скорости.
[0221] Затем вал W1 рулевого механизма приводится во вращательное движение на один оборот (360 градусов) приводной частью 20 входной стороны (S605), и получают угловое положение θ60 приводной части 60 выходной стороны (S607).
[0222] Затем посредством Уравнения (2) вычисляют передаточное отношение Tr скорости на основании величины Δθ20 изменения углового положения приводной части 20 входной стороны (360 градусов) и величины Δθ60 изменения углового положения приводной части 60 выходной стороны с момента непосредственно перед процессом S605 приведения во вращательное движение до момента непосредственно после него (S608).
[0223] Затем обращаются за настроенной информацией, относящейся к образцу W, и определяют, является ли образец W VGR (S609).
[0224] VGR сконфигурирован таким образом, что передаточное отношение рулевого механизма постепенно изменяется согласно угловому положению θ20 вала W1 рулевого механизма. Таким образом, для выполнения испытаний VGR требуется информация, указывающая на соотношение между угловым положением θ20 и передаточным отношением рулевого механизма на протяжении всего диапазона движения вала W1 рулевого механизма.
[0225] Когда тип образца W настроен на VGR (S609: ДА), текущее угловое положение θ20 вала W1 рулевого механизма и передаточное отношение Tr скорости запоминаются в связи друг с другом (S610). Затем процесс возвращается к процессу S605, и процессы S605 - S610 повторяются до тех пор, пока вал W1 рулевого механизма образца W не достигнет положения θВ концевого упирания. В этой конфигурации, передаточное отношение Tr скорости в каждом угловом положении θ20 получают и запоминают вместе с угловым положением θ20 каждый раз, когда вал W1 рулевого механизма образца W поворачивается на один оборот, т.е., каждый раз, когда шестерня образца W поворачивается на один оборот).
[0226] Когда достигнуто положение θВ концевого упирания (S606: ДА), выполняется процесс S612 приведения в соответствие (этап приведения в соответствие), и процесс S6 обнаружения передаточного отношения заканчивается. В процессе S612 приведения в соответствие, формулу вычисления для вычисления передаточного отношения Tr скорости на основании углового положения θ20 определяют на основе множества пар углового положения θ20 вала W1 рулевого механизма и передаточного отношения Tr скорости, полученных в вышеупомянутых процессах S603 - S610, и запоминают. Формула вычисления для передаточного отношения Tr скорости является, например, полиномом, получаемым на основе полученного множества пар углового положения θ20 и передаточного отношения Tr скорости посредством регрессионного анализа, например, методом наименьших квадратов. Формула вычисления для передаточного отношения Tr скорости может быть определена методом, отличным от регрессионного анализа, например, методом интерполяции.
[0227] В настоящем варианте осуществления, отношение угла поворота (или угловой скорости) подвижного основания 66 к углу поворота (или угловой скорости) вала W1 рулевого механизма определяется как передаточное отношение Tr скорости, но определение передаточного отношения Tr скорости этим не ограничено. Например, отношение угла поворота вала серводвигателя 62 приводной части 60 выходной стороны или подвижного основания 66 к углу поворота вала серводвигателя 21 приводной части 20 входной стороны или вала W1 рулевого механизма может быть использовано в качестве передаточного отношения Tr скорости. Например, когда отношение углов поворота вала серводвигателя 21 и вала серводвигателя 62 настроено в качестве передаточного отношения Tr скорости, целевое значение процесса управления серводвигателем 62 (процесса управления без изменения нагрузки L) может быть легко получено умножением целевого значения процесса управления приведением в движение серводвигателя 21 на передаточное отношение Tr скорости, и, таким образом, вычисление целевого значения процесса управления приведением в движение серводвигателя 21 может быть упрощено.
[0228] Когда образец W не является VGR и имеет фиксированное передаточное отношение (S609: НЕТ), передаточное отношение Tr скорости запоминают (S611), и процесс S6 обнаружения передаточного отношения скорости заканчивается.
[0229] Затем процесс переходит к основному испытанию испытания на надежность (S7 - S9, см. фиг. 19). В основном испытании сначала подтверждают (S7), разблокирован ли (включен ли) процесс S9 управления концевым упиранием, который будет описан ниже. Процесс S9 управления концевым упиранием является процессом управления для предотвращения приложения к валу W1 рулевого механизма крутящего момента Т, превышающего допустимое значение, посредством смягчения ударной нагрузки, генерируемой, когда вал W1 рулевого механизма достигает положения концевого упирания. При выполнении испытания общепринятым способом, в котором крутящий момент Т механически ограничен посредством использования ограничителя крутящего момента и т.п., процесс управления концевым упиранием блокируют (выключают). Следует отметить, что поскольку в общепринятом способе, в котором крутящий момент Т механически ограничен, точное управление крутящим моментом осуществляться не может, и, в случае испытания на надежность в течение длительного периода времени, механические части, такие как ограничитель крутящего момента, могут разрушиться, или их характеристики могут измениться вследствие разрушения во время испытания, процесс управления концевым упиранием обычно разблокируют (включают). Когда процесс управления концевым упиранием разблокирован (включен) (S7: ДА), далее выполняется процесс S9 управления концевым упиранием, и, когда процесс управления концевым упиранием блокирован (выключен) (S7: НЕТ), далее выполняется процесс S8 управления основным приведением в движение.
[0230] (Процесс управления основным приведением в движение)
Фиг. 23 является блок-схемой последовательности операций, показывающей процедуру процесса S8 управления основным приведением в движение. В процессе S8 управления основным приведением в движение, три процесса управления (процесс S10 управления входным валом, процесс S20 управления нагрузкой и процесс S30 управления колебанием) выполняются параллельно. Процесс S10 управления входным валом является процессом управления приведением во вращательное движение входного конца (вала W1 рулевого механизма) образца W приводной частью 20 входной стороны, и процесс S20 управления нагрузкой и процесс S30 управления колебанием являются процессами управления линейным движением выходных концов (поперечных рулевых тяг W4) образца W приводными частями 60 (60L и 60R) выходной стороны.
[0231] Следует отметить, что в настоящем варианте осуществления процесс S20 управления нагрузкой и процесс S30 управления колебанием являются процессами управления, которые выполняются произвольно и дополнительно. Процесс S20 управления нагрузкой является процессом управления для приложения осевой силы (нагрузки L) к поперечной рулевой тяге W4, и процесс S30 управления колебанием является процессом управления для приложения колебания в вертикальном направлении (направлении, перпендикулярном валу поперечной рулевой тяги W4, расположенной по существу горизонтально) к концу W41 поперечной рулевой тяги. Процесс S30 управления колебанием является процессом управления, который имитирует вертикальное перемещение оси, вызванное поведением подвески при реальном движении транспортного средства. Процесс S20 управления нагрузкой и процесс S30 управления колебанием выполняются для левой и правой приводных частей 60L и 60R выходной стороны, соответственно. Следует отметить, что когда процесс S20 управления нагрузкой и процесс S30 управления колебанием настроены на «выключено», испытание выполняется в состоянии, в котором приводная часть 60 выходной стороны удалена с образца W. Дополнительно, посредством выполнения процесса S20 управления нагрузкой при настройке на отсутствие нагрузки (нагрузка=0), становится возможным выполнить испытание без приложения нагрузки L к поперечным рулевым тягам W4 в состоянии, в котором приводная часть 60 выходной стороны соединена с образцом W.
[0232] (Процесс управления входным валом [процесс управления положением])
Фиг. 24 является блок-схемой последовательности операций, показывающей процедуру процесса S10 управления входным валом. Как описано выше, процесс S10 управления входным валом является процессом управления для приведения во вращательное движение вала W1 рулевого механизма, который является входным валом образца W, приводной частью 20 входной стороны. В процессе S10 управления входным валом выполняется процесс управления положением, в котором угловое положение θ20 вала W1 рулевого механизма образца W, соединенного с приводной частью 20 входной стороны, используется в качестве управляемой переменной. В процессе S10 управления входным валом, сначала получают (S1001) текущее угловое положение θ20 вала W1 рулевого механизма, измеряют (S1002) датчиком 23 крутящего момента крутящий момент Т вала W1 рулевого механизма, и запоминают (S1003) полученный крутящий момент Т и угловое положение θ20.
[0233] Затем вычисляют целевое значение Rθ и отклонение Еθ углового положения θ20 вала W1 рулевого механизма на основе настроенного значения условий испытания (S1004, S1005). Затем вычисляют командное значение (т.е., рабочую характеристику) серводвигателя 21 на основании отклонения Еθ и передаточного отношения r22 скорости редуктора 22 скорости (S1006). Следует отметить, что в процессе S10 управления входным валом приведение в движение серводвигателя 21 управляется процессом управления положением, в котором угловое положение Θ21 вала используется в качестве управляемой переменной. В процессе S1006, командное значение (угловое положение Θ20) серводвигателя 21 вычисляют таким образом, чтобы устранить отклонение Еθ углового положения θ20 вала W1 рулевого механизма. Более конкретно, например, целевое значение Rθ углового положения θ20 приводной части 20 входной стороны корректируют для уменьшения отклонения Еθ, и угловое положение Θ21 вала серводвигателя 21, соответствующее скорректированному целевому значению Rθ углового положения θ20 вала W1 рулевого механизма становится командным значением для серводвигателя 21. Затем серводвигатель приводят в движение на основе этого командного значения (S1007), в результате чего один процесс управления входным валом (процесс управления входным валом для одной точки управления) (S1001 - S1007) заканчивается. Процесс управления входным валом (S1001 - S1007) повторно выполняют до тех пор, пока испытание не закончится (S1009).
[0234] Следует отметить, что процесс S10 управления входным валом также выполняется в процессе S9 управления концевым упиранием, который будет описан ниже. Однако, в процессе S9 управления концевым упиранием (S1008: ДА) процессы S1001 - S1007 не повторяются, и после приведения в движение серводвигателя 21 (S1007) процесс S10 управления входным валом заканчивается.
[0235] В процессе S10 управления входным валом, описанном выше, приведение в движение серводвигателя 21 управляется процессом управления положением, в котором угловое положение Θ21 вала используется в качестве управляемой переменной. Однако, приведение в движение серводвигателя 21 может управляться процессом управления скоростью, в котором угловая скорость используется в качестве управляемой переменной.
[0236] (Процесс управления нагрузкой)
Фиг. 25 является блок-схемой последовательности операций, показывающей процедуру процесса S20 управления нагрузкой. В процессе S20 управления нагрузкой, сначала получают (S2001) текущее угловое положение Θ62 и угловую скорость  серводвигателя 62 приводной части 60 выходной стороны и текущую угловую скорость ω20 приводной части 20 входной стороны, измеряют (S2002) датчиком 662 силы нагрузку L поперечной рулевой тяги W4, и запоминают (S2003) полученные значения нагрузки L, углового положения Θ62, и угловых скоростей и ω20.
серводвигателя 62 приводной части 60 выходной стороны и текущую угловую скорость ω20 приводной части 20 входной стороны, измеряют (S2002) датчиком 662 силы нагрузку L поперечной рулевой тяги W4, и запоминают (S2003) полученные значения нагрузки L, углового положения Θ62, и угловых скоростей и ω20.
[0237] Затем получают целевое значение RL (начальное настроенное значение) нагрузки L поперечной рулевой тяги W4, и выполняют процесс S22 замедления.
[0238] Фиг. 26 является блок-схемой последовательности операций, показывающей процедуру процесса S22 замедления. Процесс S22 замедления является процессом, позволяющим не прикладывать 100% начального настроенного значения нагрузки L к образцу W сразу после начала процесса S20 управления нагрузкой, а постепенно увеличивать нагрузку L на начальной стадии процесса S20 управления нагрузкой для приближения к начальному настроенному значению. Конкретно, в процессе S22 замедления, процесс умножения целевого значения RL нагрузки L на коэффициент (коэффициент rS нагрузки), соответствующий числу n повторений цикла управления, выполняется в начальном заданном числе циклов управления процесса S20 управления нагрузкой.
[0239] Фиг. 27 является графиком, показывающим пример изменения коэффициента rS нагрузки в процессе S22 замедления. Этот график получен, когда начальный коэффициент rS0 нагрузки настроен на 0,2 (20%), и число NS замедлений настроено на 4.
[0240] В процессе S22 замедления, сначала определяют, является ли (S2201) настроенный процесс управления нагрузкой L режимом образца, и разблокирован ли (S2202) процесс S22 замедления. В настоящем варианте осуществления, поскольку процесс S22 замедления применяется только к режиму образца, в случае, когда процесс управления нагрузкой L является отличным от режима образца (S2201: НЕТ), процесс S22 замедления заканчивается без выполнения какого-либо существенного процесса (процессов S2204 - S2205, которые будут описаны ниже). Также, когда процесс S22 замедления блокирован (S2202: НЕТ), процесс S22 замедления заканчивается без выполнения какого-либо существенного процесса.
[0241] Затем определяют, является ли число n повторений целевого цикла управления (n-ого цикла управления) меньшим или равным числу NS замедлений+1 (S2203). Следует отметить, что число NS замедлений является значением, настраиваемым частью Е363 настройки числа замедлений (фиг. 11). Поскольку процесс S22 замедления применяется только к циклам управления с первого цикла управления по (NS+1)-ый цикл управления, когда число n повторений цикла управления больше NS+1 (S2203: НЕТ), процесс S22 замедления заканчивается без выполнения какого-либо существенного процесса (S2204 - S2205, которые будут описаны ниже).
[0242] Затем посредством следующего уравнения (3) вычисляют коэффициент rS нагрузки (S2204).

где:
rS является коэффициентом нагрузки,
rS0 является начальным коэффициентом нагрузки,
n является числом повторений цикла управления, и
NS является числом замедлений.
Следует отметить, что rS и rS0 являются положительными десятичными дробями, меньшими 1, и n и NS являются положительными целыми.
[0243] Затем целевое значение RL нагрузки L умножают на коэффициент rS нагрузки (S2205), и процесс S22 замедления заканчивается.
[0244] Посредством выполнения процесса S22 замедления, описанного выше, становится возможным постепенно увеличивать нагрузку L, прикладываемую к образцу W, на начальной стадии процесса S20 управления нагрузкой. Таким образом, например, в случае, когда образец W прикреплен к испытательному устройству 1 неправильно, можно выполнить операцию остановки испытательного устройства 1 до приложения большой нагрузки к образцу W, и, таким образом, можно предотвратить повреждение образца W.
[0245] Следует отметить, что в настоящем варианте осуществления процесс S22 замедления применяется только к режиму образца, но процесс замедления может быть также применен к другим режимам управления. Например, посредством настройки заранее периода TSU замедления (в секундах) для выполнения процесса S22 замедления дополнительно к начальному коэффициенту rS0 нагрузки и числу NS замедлений и вычисления коэффициента rS нагрузки относительно истекшего времени t с начала процесса S20 управления нагрузкой вместо числа n повторений цикла управления, становится возможным применять процесс замедления к другим режимам управления. В этом случае, например, коэффициент rS нагрузки в течение периода TSU замедления может быть вычислен посредством следующего уравнения (4).
где:
TSU является периодом замедления (в секундах), и
t является временем, истекшим с начала процесса S20 управления нагрузкой (в секундах).
[0246] Затем вычисляют отклонение EL (= RL-YL) нагрузки L на основании целевого значения RL и измеренного значения YL нагрузки L (S2005). Память 824 и т.п. запоминает данные, представляющие соотношение между величиной приведения в движение серводвигателя 62 и величиной изменения нагрузки L (например, числовое значение, представляющее величину изменения нагрузки L на единичный угол поворота серводвигателя 62 или на единичную угловую скорость, при единственном процессе приведения в движение (процессе управления приведением в движение для одной точки управления)), получаемые заранее экспериментально или посредством моделирования. Командное значение серводвигателя 62 вычисляют на основании этих данных и отклонения EL нагрузки L (S2006).
[0247] Следует отметить, что в настоящем варианте осуществления, в процессе S20 управления нагрузкой приведение в движение серводвигателя 62 управляется процессом управления скоростью, в котором угловая скорость используется в качестве управляемой переменной. В процессе S20 управления нагрузкой, командное значение  (угловая скорость ) серводвигателя 62 вычисляется посредством следующего уравнения (5) таким образом, чтобы отклонение EL нагрузки L устранялось, например, посредством единственного приведения в движение (приведения в движение для одной точки управления) или заданного числа приведений в движение.
(угловая скорость ) серводвигателя 62 вычисляется посредством следующего уравнения (5) таким образом, чтобы отклонение EL нагрузки L устранялось, например, посредством единственного приведения в движение (приведения в движение для одной точки управления) или заданного числа приведений в движение.

где:
является командным значением (угловой скоростью ) серводвигателя 62,
 является целевым значением угловой скорости ,
является целевым значением угловой скорости ,
 ' является корректирующим значением угловой скорости (соответствующим отклонению угловой скорости ),
' является корректирующим значением угловой скорости (соответствующим отклонению угловой скорости ),
Tr является передаточным отношением скорости,
ω20 является угловой скоростью приводной части 20 входной стороны,
r63 является передаточным отношением скорости редуктора 63 скорости,
 является коэффициентом усиления (коэффициентом преобразования «нагрузка L - угловая скорость
является коэффициентом усиления (коэффициентом преобразования «нагрузка L - угловая скорость  »),
»),
EL является отклонением нагрузки L,
RL является целевым значением нагрузки L, и
YL является измеряемым значением нагрузки L.
[0248] Следует отметить, что первый член Уравнения (5), приведенного выше, является целевым значением угловой скорости серводвигателя 62, и преобразованное значение (Tr*ω20/r63) угловой скорости серводвигателя 62 приводной части 60 выходной стороны, соответствующее угловой скорости ω20 приводной части 20 входной стороны, используется в качестве целевого значения . Второй член является корректирующим значением ' угловой скорости . Корректирующее значение ' является значением, соответствующим отклонению угловой скорости , и вычисляется умножением отклонения EL нагрузки L на коэффициент усиления.
[0249] Коэффициент усиления (коэффициент преобразования «нагрузка L - угловая скорость ») является коэффициентом для преобразования нагрузки L в угловую скорость серводвигателя 62. Более конкретно, коэффициент усиления определяется как угловая скорость , которая изменяет нагрузку L на одну единицу (например, на 1 Н) посредством одного процесса управления приведением в движение (процесса приведения в движение для одной точки управления). Коэффициент усиления получают заранее экспериментально или посредством моделирования.
[0250] Затем серводвигатель 62 приводят в движение на основе командного значения , вычисленного посредством Уравнения (5), приведенного выше (S2007), и один процесс управления нагрузкой (процесс управления нагрузкой для одной точки управления) (S2001 - S2007) заканчивается. Процесс управления нагрузкой (S2001 - S2007) повторно выполняется до тех пор, пока испытание не закончится (S2008).
[0251] Следует отметить, что в описанном выше процессе S20 управления нагрузкой, приведение в движение серводвигателя 62 управляется процессом управления скоростью, в котором угловая скорость вала используется в качестве управляемой переменной, но приведение в движение может управляться процессом управления положением, в котором угловое положение Θ62 используется в качестве управляемой переменной. Дополнительно, приведение в движение серводвигателя 62 может управляться процессом управления крутящим моментом, в котором крутящий момент вала, соответствующий нагрузке L, используется в качестве управляемой переменной. Дополнительно, вместо серводвигателя 62, например, может быть использован двигатель, который не включает в себя механизм передачи, такой как двигатель с прямым приводом или линейный двигатель. Устранение механизма передачи позволяет обеспечить более быстрый и более стабильный процесс управления.
[0252] Далее будет описан процесс Sa20 управления нагрузкой, который является модификацией описанного выше процесса S20 управления нагрузкой. Процесс Sa20 управления нагрузкой, описанный ниже, является процессом управления, точность управления которого улучшена в режиме частоты или режиме образца, в котором повторно прикладывается нагрузка L с одной и той же формой волны, посредством определения целевого значения на основе реального значения («обучающих данных LD», которые будут описаны ниже) управляемой переменной серводвигателя 62 в той же фазе (точке управления) основной формы волны (или образца формы волны). Следует отметить, что реальное значение управляемой переменной является измеряемым значением управляемой переменной в фазе (или диапазоне фаз), соответствующей точке управления, являющейся целью управления (целевой точкой управления), средним значением измеряемых значений (например, средним арифметическим, средним взвешенным, средним геометрическим, средним гармоническим и т.п.), или значением, эквивалентным среднему значению. В этом описании изобретения, например, в процессе управления нагрузкой, способ управления, в котором реальное значение управляемой переменной серводвигателя используется вместо целевого значения управляемой переменной серводвигателя 62 (например, углового положения Θ62 или угловой скорости ), вычисляемого на основании целевого значения нагрузки L, описанного выше, называется процессом управления обучением (функцией обучения). Следует отметить, что в режиме частоты и режиме образца процесс управления приведением в движение согласно одной основной форме волны или образцу формы волны выполняется посредством цикла управления, состоящего из множества точек управления, и этот цикл управления выполняется повторно.
[0253] Фиг. 28 и 29 являются блок-схемами последовательностей операций, показывающими процедуру процесса Sa20 управления нагрузкой. В процессе Sa20 управления нагрузкой, сначала подтверждают, разблокирован ли процесс управления обучением (Sа2001). Если процесс управления обучением блокирован (Sа2001: НЕТ), то выполняется описанный выше процесс S20 управления нагрузкой. Если процесс управления обучением разблокирован (Sа2001: ДА), то тогда определяют, пригоден ли настроенный режим работы для процесса управления обучением (конкретно, является ли режим работы режимом частоты или режимом образца) (Sа2002). Если режим работы не пригоден для процесса управления обучением (Sа2002: НЕТ), то выполняется описанный выше процесс S20 управления нагрузкой. Если режим работы пригоден для процесса управления обучением (Sа2002: ДА), то получают и запоминают измеренные значения углового положения Θ62, угловой скорости , и нагрузки L серводвигателя 62 приводной части 60 выходной стороны (Sа2003 - Sа2006). Затем получают целевое значение RL (начальное настроенное значение) нагрузки L (Sа2007).
[0254] Затем выполняется описанный выше процесс S22 замедления (фиг. 26), и если режим работы пригоден для процесса S22 замедления, и процесс S22 замедления разблокирован, то целевое значение RL нагрузки L уменьшают для ранее заданного числа циклов управления. Затем вычисляют отклонение EL (= RL-YL) на основании целевого значения RL и измеренного значения YL нагрузки L (Sa2008).
[0255] Затем вычисляют корректирующее значение ' управляемой переменной серводвигателя 62 (например, угловой скорости ) на основании отклонения EL нагрузки L посредством следующего Уравнения (6) (Sа2009). Следует отметить, что корректирующее значение ' является значением, эквивалентным отклонению угловой скорости , которая является управляемой переменной серводвигателя 62, и вычисляется умножением отклонения EL нагрузки L на коэффициент усиления.

где:
' является корректирующим значением угловой скорости (соответствующим отклонению угловой скорости ),
является коэффициентом усиления (коэффициентом преобразования «нагрузка L - угловая скорость ),
EL является отклонением нагрузки L,
RL является целевым значением нагрузки L, и
YL является измеряемым значением нагрузки L.
[0256] Затем, в случае первого цикла управления (Sа2010: ДА), получают угловую скорость ω20 приводной части 20 входной стороны (Sа2011), и, подобно описанному выше процессу S20 управления нагрузкой, преобразованное значение (Tr*ω20/r63) угловой скорости серводвигателя 62, вычисленное на основании угловой скорости ω20 приводной части 20 входной стороны, используется в качестве целевого значения  управляемой переменной серводвигателя 62 (Sа2012).
управляемой переменной серводвигателя 62 (Sа2012).
[0257] В случае второго или последующего цикла управления (Sа2010: НЕТ), сначала вычисляют обучающие данные LD (Sа2013). Обучающие данные LD настоящего варианта осуществления являются реальным значением управляемой переменной  , вычисленным на основании результата управления серводвигателем 62 (значения измерения угловой скорости , которая является управляемой переменной) в прошлом (например, за последние один или несколько циклов), и используются вместо целевого значения угловой скорости , вычисляемого на основании целевого значения RL нагрузки L. Посредством использования реального значения управляемой переменной в качестве целевого значения, отклонение уменьшается, и, таким образом, точность управления увеличивается.
, вычисленным на основании результата управления серводвигателем 62 (значения измерения угловой скорости , которая является управляемой переменной) в прошлом (например, за последние один или несколько циклов), и используются вместо целевого значения угловой скорости , вычисляемого на основании целевого значения RL нагрузки L. Посредством использования реального значения управляемой переменной в качестве целевого значения, отклонение уменьшается, и, таким образом, точность управления увеличивается.
[0258] Обучающие данные LD(n, m), соответствующие m-ой точке управления в n-ом цикле управления (т.е., целевой точке управления, являющейся точкой управления цели управления в это время), вычисляют посредством следующего уравнения (7).
где:
LD(n, m) является обучающими данными (n-ый цикл управления, m-ая точка управления),
n и m являются положительными целыми,
(i, j) является управляемой переменной угловой скорости (i-ый цикл управления, j-ая точка управления),
p является положительным целым, меньшим n (постоянная, представляющая диапазон циклов управления, подлежащих усреднению), и
q является положительным целым, меньшим m (постоянная, представляющая диапазон циклов управления, подлежащих усреднению).
[0259] А именно, обучающие данные LD(n, m) являются средним значением управляемых переменных (i, j) точек управления вблизи m-ой точки управления (2q+1 точек управления в диапазоне от (m-q)-ой точки до (m+q)-ой точки, называемых «соседними точками управления») в множестве самых последних циклов управления (p циклов управления от (n-p)-ого цикла управления до (n-1)-ого цикла управления). Следует отметить, что постоянная p является параметром, который настраивает диапазон циклов управления, подлежащих усреднению, и постоянная q является параметром, который настраивает диапазон точек управления, подлежащих усреднению.
[0260] Как описано выше, в процессе Sa20 управления нагрузкой, посредством использования обучающих данных LD(n, m), получаемых усреднением управляемых переменных (i, j) множества циклов управления, можно выполнить процесс управления с меньшим влиянием искажений. Дополнительно, посредством использования обучающих данных LD(n, m), получаемых усреднением управляемых переменных (i, j) множества точек управления, можно выполнить процесс управления с меньшим влиянием искажений.
[0261] Затем настраивают обучающие данные LD на целевое значение угловой скорости серводвигателя 62 (Sа2014).
[0262] Затем вычисляют командное значение серводвигателя 62 посредством следующего уравнения (8) (Sа2015). Следует отметить, что в случае первого цикла управления Уравнение (8) становится таким же, как Уравнение (5), описанное выше.

[0263] Затем приводят в движение серводвигатель 62 на основе командного значения UΏ (Sа2016), и один процесс управления нагрузкой (процесс управления нагрузкой для одной точки управления) (Sа2003 - Sа2016) заканчивается. Процесс управления нагрузкой (Sа2003 - Sа2016) повторно выполняют (Sа2017) до тех пор, пока испытание не закончится.
[0264] В процессе Sa20 управления нагрузкой, обучающие данные LD(n, m) являются средним значением управляемых переменных (i, j) как для цикла i управления, так и для точки j управления. Однако, обучающие данные LD(n, m) могут быть вычислены без вычисления среднего значения для по меньшей мере одного из цикла i управления и точки j управления. Например, значение управляемой переменной (n--1, m) одной и той же (или соответствующей) точки управления в предыдущем цикле управления может быть использовано фактически в качестве обучающих данных LD(n, m) без вычисления среднего значения как для цикла i управления, так и для точки j управления.
[0265] Следует отметить, что в приведенном выше уравнении (7) управляемая переменная (i, j) из (n-p)-ого цикла управления используется для всего диапазона точек управления, подлежащих усреднению (всего диапазона от (m-q)-ой точки управления до (m+q)-ой точки управления), но обучающие данные LD(n, m) могут быть вычислены с использованием управляемой переменной (i, j) из циклов управления с (n-p+1)-ого цикла управления по n-ый цикл управления для точек управления с (m-q)-ой точки управления по (m--1)-ую точку управления, для которых управляемая переменная (i, j) n-ого цикла управления уже была получена.
[0266] В приведенном выше уравнении (7), обучающие данные LD(n, m) для целевой точки управления (m-ой точки управления), которая является целью управления в это время, вычисляются с использованием измеряемых значений управляемой переменной (i, j) в диапазоне точек управления, центрированных на m-ой точке управления. А именно, обучающие данные LD(n, m) вычисляются на основании измеряемых значений управляемой переменной (i, j), имеющих ту же самую фазу, что и целевая точка управления. Однако, если имеется фазовая задержка в реакции, как показано в следующем уравнении (9), посредством задания разности фаз (величины r настройки фазы), соответствующей диапазону фазовых точек, используемых в вычислении обучающих данных LD(n, m) для устранения фазовой задержки, становится возможным более стабильный процесс управления. Следует отметить, что в этом случае (m-r)-ая точка управления, чья фаза сдвинута относительно целевой точки управления (m-ой точки управления) на величину r настройки фазы, является соответствующей точкой управления, соответствующей целевой точке управления.

где r является положительным целым, представляющим величину настройки фазы.
[0267] Следует отметить, что в описанном выше процессе Sa20 управления нагрузкой приведение в движение серводвигателя 62 управляется процессом управления скоростью, в котором угловая скорость вала используется в качестве управляемой переменной. Однако, приведение в движение серводвигателя 62 может управляться процессом управления положением, в котором угловое положение Θ62 используется в качестве управляемой переменной. Приведение в движение серводвигателя 62 может также управляться процессом управления крутящим моментом, в котором крутящий момент вала используется в качестве командного значения (управляемой переменной). Поскольку крутящий момент вала серводвигателя 62 пропорционален нагрузке L, нагрузка L по существу является управляемой переменной серводвигателя 62 в процессе управления крутящим моментом. Дополнительно, вместо серводвигателя 62, например, может быть использован двигатель, который не включает в себя механизм передачи, такой как двигатель с прямым приводом или линейный двигатель. Устранение механизма передачи позволяет обеспечить процесс управления с более быстрой и более стабильной реакцией.
[0268] Следует отметить, что в настоящем варианте осуществления целевое значение (обучающие данные LD) управляемой переменной определяется на основе реального значения управляемой переменной серводвигателя 62 (например, углового положения Θ62 или угловой скорости ), как описано выше, но настоящее изобретение не ограничено этой конфигурацией. Например, целевое значение управляемой переменной (например, углового положения или угловой скорости двигателя) может быть определено на основе реального значения рабочей характеристики двигателя (например, тока возбуждения, подаваемого на двигатель) (например, среднее значение управляемых переменных Y смежных точек управления в нескольких последних циклах управления может быть использовано в качестве целевого значения).
[0269] (Процесс управления пружинной нагрузкой)
Как описано выше, процессы S20 и Sa20 управления нагрузкой адаптированы к различным режимам управления, таким как режим постоянной нагрузки, режим частоты, режим образца, режим реакции на угол рулевого механизма, и режим внешнего сигнала. Эти режимы управления определяются согласно целевому значению RL, получаемому в процессе S2004 (фиг. 25) или процессе Sа2007 (фиг. 28).
[0270] Далее будет описан процесс управления пружинной нагрузкой, который является одним режимом режима реакции на угол рулевого механизма, в котором прикладывается нагрузка L, соответствующая угловому положению θ20 вала W1 рулевого механизма. Процесс управления пружинной нагрузкой является процессом управления для приложения нагрузки L, которая упруго изменяется (монотонно увеличивается или уменьшается) согласно угловому положению θ20 вала W1 рулевого механизма. Посредством процесса управления пружинной нагрузкой становится возможным прикладывать к образцу W нагрузку L, которая близка к нагрузке, которая действует на рулевой механизм, когда рулевой механизм установлен в реальном транспортном средстве, и становится возможным более точно воспроизводить состояние рулевого механизма, реально установленного в транспортное средство. Следует отметить, что процесс управления пружинной нагрузкой является одним аспектом процесса S2004 в процессе S20 управления нагрузкой или процесса Sа2007 в процессе Sa20 управления нагрузкой.
[0271] <Пример 1>
Фиг. 30 является графиком, показывающим соотношение между угловым положением θ20 вала W1 рулевого механизма и целевым значением RL нагрузки L, используемым в процессе управления пружинной нагрузкой Примера 1. На фиг. 30, сплошная линия (R) показывает нагрузку L, прикладываемую к правой поперечной рулевой тяге W4, и пунктирная линия (L) показывает нагрузку L, прикладываемую к левой поперечной рулевой тяге W4. Как показано на фиг. 30, в процессе управления пружинной нагрузкой Примера 1 нагрузки L, которые изменяются линейно (упруго) относительно углового положения θ20 вала W1 рулевого механизма, прикладываются к поперечным рулевым тягам W4 образца W. Процесс управления пружинной нагрузкой Примера 1 является процессом управления, на котором отражается динамика нагрузок L в реальном транспортном средстве, в котором большие тяговые усилия (нагрузки L) действуют на поперечные рулевые тяги W4, когда угол рулевого механизма увеличивается (нагрузки L монотонно увеличиваются согласно углу рулевого механизма).
[0272] Информация, указывающая на соотношение между угловым положением θ20 и целевым значением RL нагрузки L, показанная на фиг. 30, запоминается в памяти 824 и т.п. в форме, например, таблицы числовых значений или функции. В процессе S2004 или Sa2007, информация, указывающая на соотношение между угловым положением θ20 и целевым значением RL нагрузки L, запомненная в управляющей части 82, считывается, и целевое значение RL нагрузки L, соответствующее угловому положению θ20 в это время, получают на основе этого соотношения. Процесс управления пружинной нагрузкой Примера 1 реализован посредством приведения в движение серводвигателя 62 командным значением UΏ, вычисляемым на основе целевого значения RL с использованием, например, Уравнения (5).
[0273] В процессе управления пружинной нагрузкой, нагрузка L управляется на основе входного воздействия (вращения вала W1 рулевого механизма), а не выходного воздействия (перемещения поперечных рулевых тяг W4) на образец W. Таким образом, процесс управления выполняется без использования механизма передачи, который имеет образец W, в результате чего предотвращается задержка реакции вследствие люфта рулевого механизма образца W, и, таким образом, становится возможным процесс управления с более высокой точностью. Дополнительно, поскольку процесс управления выполняется без использования механизма управления образца W, предотвращаются помехи, связанные с управлением посредством ECU образца W, и, таким образом, становится возможным более стабильный процесс управления.
[0274] В процессе управления пружинной нагрузкой Примера 1, описанном выше, поскольку угловое положение θ20 вала W1 рулевого механизма и целевое значение RL левой и правой нагрузок L соответствуют друг другу на взаимно однозначной основе, одна и та же нагрузка L прикладывается в угловом положении θ20 вала W1 рулевого механизма независимо от направления вращения вала W1 рулевого механизма. Однако, нагрузка L, которая действует на поперечную рулевую тягу W4 в реальном транспортном средстве, имеет свойство гистерезиса, при котором нагрузка L изменяется в зависимости от направления вращения вала W1 рулевого механизма. А именно, поскольку нагрузка L действует как сопротивление на вращение вала W1 рулевого механизма, направление нагрузки L также отличается в зависимости от направления, в котором вращается вал W1 рулевого механизма.
[0275] <Пример 2>
Пример 2 процесса управления пружинной нагрузкой (процесса S21 управления пружинной нагрузкой), описанный ниже, является процессом управления, который позволяет более точно воспроизводить нагрузку, которая действует на образец W, когда образец W установлен в реальное транспортное средство, посредством приложения нагрузки L, имеющей гистерезис, как в реальном транспортном средстве.
[0276] Фиг. 31 является графиком, показывающим соотношение между угловым положением θ20 вала W1 рулевого механизма и целевым значением RL нагрузки L в Примере 2. График фиг. 31 состоит из следующих четырех кривых (R/CW, L/CW, R/CCW и L/CCW). Таким образом, целевое значение RL нагрузки L на основании только углового положения θ20 определяется неоднозначно, и требуется процесс определения того, какую из четырех кривых следует применять.
(1) Нагрузка L (R/CW) подлежит приложению к правой поперечной рулевой тяге W4, когда вал W1 рулевого механизма вращается по часовой стрелке.
(2) Нагрузка L (L/CW) подлежит приложению к левой поперечной рулевой тяге W4, когда вал W1 рулевого механизма вращается по часовой стрелке.
(3) Нагрузка L (R/CCW) подлежит приложению к правой поперечной рулевой тяге W4, когда вал W1 рулевого механизма вращается против часовой стрелки.
(4) Нагрузка L (L/CCW) подлежит приложению к левой поперечной рулевой тяге W4, когда вал W1 рулевого механизма вращается против часовой стрелки.
[0277] Фиг. 32 является блок-схемой последовательности операций, показывающей процедуру процесса S21 управления пружинной нагрузкой (процесса для получения целевого значения RL нагрузки L) Примера 2. Процесс S21 управления пружинной нагрузкой применим к процессу S2004 в процессе S20 управления нагрузкой или к процессу Sа2007 в процессе Sa20 управления нагрузкой.
[0278] В процессе S21 управления пружинной нагрузкой, сначала получают крутящий момент Т и угловую скорость ω20 вала W1 рулевого механизма образца W (S2101). Затем сравнивают направления крутящего момента Т и угловой скорости ω20 (S2102).
[0279] Когда направления крутящего момента Т и угловой скорости ω20 не совпадают друг с другом (S2102: НЕТ), определяют, что ручка находится в состоянии, в котором рука с нее снята, и обе нагрузки L, подлежащие приложению к образцу W левой и правой приводными частями 60L и 60R выходной стороны настраиваются на отсутствие нагрузки (целевое значение RL нагрузки L=0) (S2103).
[0280] Когда направление крутящего момента Т совпадает с направлением угловой скорости ω20 (S2102: ДА), определяют направление вращения вала W1 рулевого механизма (S2104). Когда вал W1 рулевого механизма вращается в направлении CW (S2104: ДА), целевое значение RL нагрузки L для правой приводной части 60R выходной стороны определяется функцией (или таблицей числовых значений) R/CW, и целевое значение RL нагрузки L для левой приводной части 60L выходной стороны определяется функцией (или таблицей числовых значений) L/CW. Когда вал W1 рулевого механизма вращается в направлении CCW (S2104: НЕТ), целевое значение RL нагрузки L для правой приводной части 60R выходной стороны определяется функцией (или таблицей числовых значений) R/CCW, и целевое значение RL нагрузки L для левой приводной части 60L выходной стороны определяется функцией (или таблицей числовых значений) L/CCW.
[0281] Как показано на графике фиг. 31, в процессе S21 управления пружинной нагрузкой Примера 2 нагрузка L действует в направлении против перемещения поперечной рулевой тяги W4, вызванного вращением вала W1 рулевого механизма. Следует отметить, что знак нагрузки L определяется таким образом, чтобы направление вовне (т.е., направление вправо для правой поперечной рулевой тяги W4 и направление влево для левой поперечной рулевой тяги W4) было положительным.
[0282] Дополнительно, при вращении рулевого механизма вовне (R/CW, L/CCW) изменение нагрузки L относительно углового положения θ20 является большим, и при вращении рулевого механизма вовнутрь (L/CW, R/CCW) изменение нагрузки L относительно углового положения θ20 является малым.
[0283] Как описано выше, поскольку процесс S21 управления пружинной нагрузкой Примера 2 отражает направленности (характеристики гистерезиса) нагрузок, которые действуют на поперечную рулевую тягу W4 во время движения реального транспортного средства, можно более точно воспроизводить нагрузки, которые принимают поперечные рулевые тяги W4 при нахождении в реальном транспортном средстве.
[0284] Следует отметить, что в процессе S21 управления пружинной нагрузкой, когда крутящий момент Т (и/или угловая скорость ω20) мал, результаты определения процессов S2102 и S2104 могут часто изменяться, и процесс управления может стать нестабильным. Таким образом, например, когда крутящий момент Т (и/или угловая скорость ω20) меньше заданного значения, левая и правая приводные части 60L и 60R выходной стороны могут быть настроены на состояние отсутствия нагрузки.
[0285] Следует отметить, что при выполнении испытания в состоянии, в котором образец W, адаптированный к автономному приведению в движение, управляется в режиме автономного приведения в движение, приводная часть 20 входной стороны не используется, и ECU образца W соединяется с управляющей частью 82 через интерфейсную часть 86, и управляющая часть 82 заставляет ECU образца W управлять вращением рулевого механизма. В этом случае, измерительный блок входной стороны, включающий в себя кодер поворота и датчик крутящего момента, соединяется с валом W1 рулевого механизма образца W вместо приводной части 20 входной стороны. Затем выполняется процесс S21 управления пружинной нагрузкой на основе крутящего момента Т и угловой скорости ω20 вала W1 рулевого механизма, измеряемыми измерительным блоком входной стороны.
[0286] Когда крутящий момент Т не может быть обнаружен, процесс S21 управления пружинной нагрузкой может быть выполнен на основе только угловой скорости ω20 вала W1 рулевого механизма. В этом случае процессы S2102 - S2103 опускаются.
[0287] Когда угловой сигнал, указывающий на угловое положение θ20 вала W1 рулевого механизма, и сигнал крутящего момента, указывающий на крутящий момент Т, могут быть извлечены из ECU образца W, процесс S21 управления пружинной нагрузкой может быть также выполнен на основе этих сигналов.
[0288] (Процесс управления колебанием)
Фиг. 33 является блок-схемой последовательности операций, показывающей процедуру процесса S30 управления колебанием. В процессе S30 управления колебанием, сначала вычисляют командное значение углового положения Θ67 вала серводвигателя 67 приводной части 60 выходной стороны на основании целевого значения высоты Ht подвижного основания 66 и шага винта подачи механизма 364b винта подачи, которые могут быть получены из настроенных условий испытания (S3001). Затем приводят в движение серводвигатель 67 согласно командному значению углового положения Θ67 (S3002).
[0289] Затем получают измеренное значение углового положения Θ67 вала, обнаруживаемое кодером RE поворота, встроенным в серводвигатель 67 (S3003), и вычисляют (S3004) и запоминают (S3005) высоту Ht подвижного основания 66 на основании измеренного значения углового положения Θ67 и шага винта подачи механизма 364b винта подачи, после чего один процесс управления колебанием (процесс управления колебанием для одной точки управления) (S3001 - S3005) заканчивается. Процесс управления колебанием (S3001 - S3005) повторно выполняется до тех пор, пока испытание не закончится (S3006: ДА).
[0290] (Процесс управления концевым упиранием)
В испытании на надежность рулевого механизма, вал W1 рулевого механизма образца W повторно совершает взаимно обратные движения заданное число раз (или в течение заданного времени испытания) во всем диапазоне движения (от одного положения концевого упирания до другого положения концевого упирания). В общепринятом испытательном устройстве, вал W1 рулевого механизма приводят во вращательное движение с постоянной скоростью до тех пор, пока вал W1 рулевого механизма не достигнет конца диапазона движения, и процесс управления для изменения направления приведения в движение на обратное выполняют после обнаружения скачка крутящего момента, генерируемого, когда вал W1 рулевого механизма достигает конца диапазона движения (концевого упирания). Таким образом, например, в случае рулевого механизма типа «зубчатая рейка и шестерня», когда конец рейки достигает положения концевого упирания с постоянной скоростью, конец рейки сталкивается с картером редуктора, и, таким образом, разрушительная ударная нагрузка может действовать на образец W. Подобно рулевому механизму типа «зубчатая рейка и шестерня», поскольку рулевые механизмы других типов также снабжены стопором, который ограничивает диапазон движения, подобная разрушительная ударная нагрузка может возникать при достижении положения концевого упирания.
[0291] Процесс S9 управления концевым упиранием настоящего варианта осуществления является процессом управления приведением в движение, который позволяет предотвратить разрушение образца W вследствие ударной нагрузки, генерируемой во время концевого упирания, посредством выполнения процесса управления таким образом, чтобы крутящий момент, больший или равный заданному максимальному значению, не действовал на вал W1 рулевого механизма образца W во время концевого упирания.
[0292] Фиг. 34-35 являются блок-схемой последовательности операций, показывающей процедуру процесса S9 управления концевым упиранием. В процессе S9 управления концевым упиранием, сначала выполняют процесс управления положением, а именно, процесс S10 управления входным валом (фиг. 24), для приводной части 20 входной стороны, и приводят во вращательное движение вал W1 рулевого механизма с заданной угловой скоростью ω20. Следует отметить, что процесс S10 управления входным валом настоящего варианта осуществления является процессом управления положением, в котором угловое положение θ20 вала W1 рулевого механизма используется в качестве управляемой переменной, и процесс управления выполняется с использованием целевого значения углового положения θ20, вычисляемого на основании настроенного значения угловой скорости ω20 вала W1 рулевого механизма. Дополнительно, в процессе S9 управления концевым упиранием процесс управления входным валом (S1001 - S1007) не повторяется (т.е., процесс S1009 определения пропускается), а выполняется только один раз.
[0293] Затем определяют, находится ли угловое положение θ20 вала W1 рулевого механизма, полученное в процессе S10 управления входным валом, в пределах диапазона углов определения концевого упирания (процесса S901 определения концевого упирания). Диапазон углов определения концевого упирания является областью, настраиваемой в положении концевого упирания или вблизи него. Процесс S10 управления входным валом продолжается до тех пор, пока угловое положение θ20 вала W1 рулевого механизма не достигнет диапазона углов определения концевого упирания. Когда угловое положение θ20 вала W1 рулевого механизма достигает диапазона углов определения концевого упирания (S901: ДА), крутящий момент Т вала W1 рулевого механизма в это время запоминают в качестве начального крутящего момента Т0 перед концевым упиранием (S902).
[0294] Затем непрерывно повторяют процесс S10 управления входным валом до тех пор, пока не будет достигнуто состояние концевого упирания (S903: ДА). Следует отметить, что в настоящем варианте осуществления, то, что образец W находится в состоянии концевого упирания, определяется на основе того, удовлетворяется ли следующее неравенство (10) (определение концевого упирания).

где:
T является измеренным значением крутящего момента,
rT является критерием определения концевого упирания (%),
Tl является максимальным крутящим моментом, и
T0 является начальным крутящим моментом.
[0295] Следует отметить, что начальный крутящий момент Т0 изменяется в зависимости от того, как образец W прикреплен и т.п., и является одним из факторов, которые вызывают ошибки в измеряемом значении крутящего момента. Посредством вычитания начального крутящего момента Т0, как показано в неравенстве (10), может быть увеличена точность определения концевого упирания. Однако, определение концевого упирания может быть осуществлено посредством следующего неравенства (10') без вычитания начального крутящего момента Т0. В этом случае, эталонное значение (настроенное значение) крутящего момента для определения того, находится ли образец W в состоянии концевого упирания, получают умножением максимального крутящего момента Т1 (называемого «первым целевым крутящим моментом») на критерий rT определения.

[0296] Определение на основе неравенства (10 или (10') выполняется управляющей частью 82. В этом определении, управляющая часть 82 функционирует в качестве средства вычисления настроенного значения крутящего момента и вычисляет настроенное значение крутящего момента, отличное от максимального крутящего момента Т1, на основе максимального крутящего момента Т1 и критерия rT определения концевого упирания посредством правой стороны каждого неравенства. Конкретно, управляющая часть 82 (средство вычисления настроенного значения крутящего момента) вычисляет, например, значение, получаемое умножением максимального крутящего момента на критерий rT определения концевого упирания, в качестве настроенного значения крутящего момента.
[0297] Максимальный крутящий момент Т1 является заданным максимальным значением крутящего момента и настраивается, например, на значение, меньшее или равное максимальному значению допустимого крутящего момента образца W. Критерий rT определения концевого упирания является индексом эталонного значения величины крутящего момента для определения состояния концевого упирания (называемого «крутящим моментом Td определения концевого упирания») и определяется как отношение (процентное отношение) крутящего момента Td определения концевого упирания к максимальному крутящему моменту Т1, причем крутящий момент Td определения концевого упирания и максимальный крутящий момент Т1 являются, соответственно, нулевой точкой, скорректированной начальным крутящим моментом Т0. Более конкретно, критерий rT определения концевого упирания определяется посредством следующего уравнения (11).

[0298] Посредством настройки эталонного значения крутящего момента посредством использования критерия rT определения концевого упирания в процентах, можно интуитивно понять критерий определения, и один и тот же критерий rT определения может быть использован независимо от типа образца W (т.е., независимо от разницы в допустимом крутящем моменте). Следует отметить, что вместо критерия rT определения концевого упирания может быть прямо настроен крутящий момент Td определения концевого упирания.
[0299] Следует отметить, что максимальный крутящий момент Т1 настраивается частью E81LT настройки локальных пределов крутящего момента экрана Sc8 настройки пределов (фиг. 18). Дополнительно, крутящий момент Td определения концевого упирания настраивается, например, экраном Sc7 редактирования образца формы волны. А именно, часть E81LT настройки локальных пределов крутящего момента и экран Sc7 редактирования образца формы волны функционируют в качестве средства приема настроенного значения крутящего момента, которое принимает пользовательские входные данные об условии управления крутящим моментом (настроенные значения крутящего момента Т).
[0300] Когда достигается состояние концевого упирания (S903: ДА), максимальный крутящий момент Т1 настраивают на целевое значение TS процесса S11 управления входным валом (управления крутящим моментом), который будет описан ниже (S904), и настраивают (S905) максимальное значение угловой скорости ω20 вала W1 рулевого механизма (т.е., угловой скорости ω20 приводной части 20 входной стороны) в процессе S11 управления крутящим моментом. Затем переключают процесс приведения в движение приводной части 20 входной стороны с процесса S10 управления положением на процесс S11 управления крутящим моментом. Посредством настройки максимального значения угловой скорости ω20 в процессе S905, поскольку вращение вала W1 рулевого механизма управляется таким образом, чтобы не превышалось настроенное максимальное значение угловой скорости ω20, может быть предотвращено возникновение ударной нагрузки вследствие внезапного приведения в движение вала W1 рулевого механизма.
[0301] Фиг. 36 является блок-схемой последовательности операций, показывающей процедуру процесса S11 управления крутящим моментом. Процесс S11 управления крутящим моментом является процессом управления приведением в движение приводной части 20 входной стороны, в котором крутящий момент Т вала W1 рулевого механизма используется в качестве управляемой переменной. В процессе S11 управления крутящим моментом, сначала вычисляют отклонение Еθ углового положения θ20 вала W1 рулевого механизма посредством следующего уравнения (12) (S1101). Следует отметить, что коэффициент KT-θ преобразования является постоянной, определяемой как величина Δθ20 изменения углового положения для изменения крутящего момента Т на одну единицу (например, на 1 Н*м), и получается заранее экспериментально или посредством моделирования.

где:
Еθ является отклонением углового положения θ20 вала W1 рулевого механизма,
KT-θ является коэффициентом преобразования «крутящий момент Т - угловое положение θ20»,
ET является отклонением крутящего момента Т,
RT является целевым значением крутящего момента Т вала W1 рулевого механизма, и
YT является измеряемым значением крутящего момента Т вала W1 рулевого механизма.
[0302] Затем определяют, является ли величина отклонения Еθ меньшей или равной максимальной операционной величине δθmax, соответствующей максимальному значению угловой скорости ω20 вала W1 рулевого механизма (S1102). Когда величина отклонения Еθ является меньшей или равной максимальной операционной величине δθmax (S1102: ДА), значение отклонения Еθ настраивают равным операционной величине δθ20, чтобы устранить отклонение Еθ (S1103). Когда величина отклонения Еθ больше максимальной операционной величины δθmax приводной части 20 входной стороны (S1102: НЕТ), операционную величину δθ20 приводной части 20 входной стороны настраивают равной значению, имеющему ту же величину, что и максимальная операционная величина δθmax, и тот же знак, что и отклонение Еθ (S1104). Затем приводят серводвигатель 21 в движение на угол δΘ21 (= δθ20/r22), соответствующий операционной величине δθ20 (S1105).
[0303] Затем получают (S1106) угловое положение θ20 вала W1 рулевого механизма и измеряют (S1107) крутящий момент Т, и запоминают (S1108) угловое положение θ20 и крутящий момент Т, после чего один цикл процесса S11 управления крутящим моментом заканчивается. Процесс S11 управления крутящим моментом повторяется до тех пор, пока величина крутящего момента Т вала W1 рулевого механизма не станет большей или равной величине целевого значения TS (т.е., максимального крутящего момента Т1) (S906: ДА).
[0304] Затем, когда настроена скорость rRT релаксации крутящего момента (единица: Н*м/с) (S907: ДА), максимальное значение угловой скорости ω20 вала W1 рулевого механизма изменяют до значения KT-θ*rRT, соответствующее скорости rRT релаксации крутящего момента (S908). В этой конфигурации, поскольку крутящий момент постепенно изменяется со скоростью rRT релаксации крутящего момента, стабильность процесса управления крутящим моментом улучшается. Дополнительно, когда скорость rRT релаксации крутящего момента не настроена (S907: НЕТ), настроенное значение максимального значения угловой скорости ω20 вала W1 рулевого механизма отменяется (S909). Следует отметить, что когда скорость rRT релаксации крутящего момента не настроена, максимальное значение угловой скорости ω20, настроенное в процессе S905, может быть сохранено без отмены настроенного значения максимального значения угловой скорости ω20.
[0305] Затем заданный крутящий момент Т2 удержания (называемый «вторым целевым крутящим моментом») настраивают равным целевому значению TS процесса S11 управления крутящим моментом (S910), и выполняют процесс S11 управления крутящим моментом. Когда крутящий момент Т по существу достигает целевого значения TS (т.е., крутящего момента Т2 удержания) (S911: ДА), запускают таймер (S912), процесс S11 управления крутящим моментом продолжается до тех пор, пока не истечет настроенное время (называемое «интервалом»), и крутящий момент Т2 удержания сохраняют в течение настроенного времени. Процесс S9 управления концевым упиранием, описанный выше, повторно выполняют до тех пор, пока испытание не закончится (S914: ДА). Следует отметить, что когда испытание продолжается (S914: НЕТ), способ управления приведением в движение приводной части 20 входной стороны переключается с процесса S10 управления положением на процесс S11 управления крутящим моментом.
[0306] (Процесс управления изменением направления движения на обратное)
Процесс S9 управления концевым упиранием, описанный выше, является процессом управления для сообщения импульса валу W1 рулевого механизма в положении концевого упирания (конкретно, для сохранения заданного крутящего момента Т2 удержания в течение настроенного времени). Однако существуют также ситуации, в которых требуется процесс управления для непосредственного изменения направления вращения на обратное без сообщения импульса валу W1 рулевого механизма в положении концевого упирания. Когда такое изменение направления движения на обратное осуществляется нормальным процессом управления положением, во время изменения направления движения на обратное может возникнуть непреднамеренная внезапная флуктуация крутящего момента, и достоверность результата испытания может ухудшиться. Процесс S50 управления изменением направления движения на обратное, который будет описан ниже, является процессом управления для изменения направления движения вала W1 рулевого механизма на обратное таким образом, чтобы при достижении положения концевого упирания не возникала внезапная флуктуация крутящего момента.
[0307] Фиг. 37 является блок-схемой последовательности операций, показывающей процедуру процесса S50 управления изменением направления движения на обратное. Фиг. 38 является графиком (формой волны входного вала) для объяснения поведения процесса S50 управления изменением направления движения на обратное. Конкретно, фиг. 38 показывает форму волны углового положения θ20 вала W1 рулевого механизма, которое является управляемой переменной, причем абсцисса представляет точку k управления, эквивалентную оси времени, и ордината представляет угловое положение θ20. Следует отметить, что процесс S50 управления изменением направления движения на обратное является процессом, подобным процессу S10 управления входным валом, который является нормальным процессом управления положением, за исключением того, что процесс S50 управления изменением направления движения на обратное включает в себя процесс S5100 пропуска (и процесс S5004 определения в отношении того, следует ли выполнять процесс S5100 пропуска), который будет описан ниже.
[0308] В процессе S50 управления изменением направления движения на обратное, сначала сбрасывают счетчик k, представляющий точку k управления, до начального значения «1» (S5001). Затем получают (S5002) измеренные значения углового положения θ20 и крутящего момента Т вала W1 рулевого механизма и запоминают (S5003) их в связи со счетчиком k.
[0309] Затем определяют, превышает ли величина крутящего момента Т вала W1 рулевого механизма эталонное значение τ (т.е., достигнуто ли положение концевого упирания) (S5004). Когда величина крутящего момента Т превышает эталонное значение τ и определено, что положение концевого упирания достигнуто (S5004: ДА), выполняют процесс S5100 пропуска. Процесс S5100 пропуска является процессом пропуска области точек k управления (участка, указанного точечной линией на фиг. 38), в которой ожидается, что крутящий момент Т значительно превысит эталонное значение τ вследствие концевого упирания, и процессом продвижения счетчика k в точку k управления (например, kA' или kB' на фиг. 38), в которой ожидается, что крутящий момент Т будет по существу равен крутящему моменту Т в это время (т.е., эталонному значению τ). Детали процесса S5100 пропуска будут описаны ниже.
[0310] Если величина крутящего момента Т не превышает эталонное значение τ (S5004: НЕТ), то получают (S5005) целевое значение Rθ углового положения θ20, соответствующего точке k управления. Целевое значение Rθ вычисляют на основе заданной формы волны входного вала (числовой таблицы или функции, представляющей соотношение между точкой k управления и угловым положением θ20, показанной на фиг. 38). Затем вычисляют (S5006) отклонение Еθ углового положения θ20, вычисляют (S5007) командное значение серводвигателя 62 на основе отклонения Еθ, и приводят (S5008) серводвигатель 62 в движение командным значением . Если испытание должно быть продолжено (S5009: ДА), то счетчик k увеличивают (S5010), и процесс возвращается к этапу S5002. Процессы S5002 - S5010 повторно выполняют до тех пор, пока испытание не закончится.
[0311] Далее будет описан процесс S5100 пропуска. В форме волны входного вала, показанной на фиг. 38, настроена форма волны для одного цикла (цикла управления), и процесс управления приведением во вращательное движение вала W1 рулевого механизма на основе этой формы волны входного вала непрерывно повторяется в течение заданного периода времени (например, 2000 часов).
[0312] В процессе управления входным валом, показанном на фиг. 38, вал W1 рулевого механизма приводят во взаимно обратные вращательные движения с постоянной угловой скоростью ω20 между двумя концами предполагаемого диапазона движения вала W1 рулевого механизма (предполагаемыми положениями θЕ1 и θЕ2 концевого упирания). Положения концевого упирания вала W1 рулевого механизма постепенно изменяются во время долговременного испытания на надежность. Таким образом, для надежного достижения положений концевого упирания, предполагаемые положения θЕ1 и θЕ2 концевого упирания настраиваются на положения за пределами реальных начальных положений θА и θВ концевого упирания (т.е., положений, находящихся на расстоянии от центрального положения θС), которые проверяются в процессе S4 центрирования и т.п. перед испытанием на надежность. Таким образом, угловое положение θ20 вала W1 рулевого механизма достигает реальных положений θА и θВ концевого упирания перед достижением предполагаемых положений θЕ1 и θЕ2 концевого упирания, и крутящий момент Т превышает эталонное значение τ.
[0313] Фиг. 39 является блок-схемой последовательности операций, показывающей процедуру процесса S5100 пропуска. Как описано выше, процесс S5100 пропуска является процессом пропуска участков точечных линий вблизи точек Е1 и Е2 на форме волны входного вала (т.е., предполагаемых положений θЕ1 и θЕ2 концевого упирания), где ожидается, что крутящий момент Т значительно превысит эталонное значение τ, и процессом перемещения из точек EA и EB в точки EA' и EB' в тех же угловых положениях θА и θВ, когда достигаются точки EA и EB (т.е., положения θА и θВ концевого упирания) на форме волны входного вала, показанной на фиг. 38, и величина крутящего момента Т превышает эталонное значение τ.
[0314] Для этой цели, сначала ищут (S5110) точки EA' и EB' на форме волны входного вала в тех же угловых положениях θА и θВ, где находятся точки EA и EB. В примере формы волны входного вала, показанной на фиг. 38, точки EA и EA' расположены симметрично относительно перпендикулярной линии Р1, проходящей через точку Е1, и точки EB и EB' расположены симметрично относительно перпендикулярной линии Р2, проходящей через точку Е2. Дополнительно, поскольку число К точек управления, образующих форму волны входного вала, является известным значением, настроенным заранее, и точки Е1 и Е2 расположены в  цикла и
цикла и  цикла формы волны входного вала, соответственно, точка k1 управления в точке Е1 и точка k2 управления в точке Е2 являются К/4 и К3/4, соответственно. Таким образом, точка kA' управления в точке EA' и точка kВ' управления в точке EВ' вычисляются посредством следующих уравнений (13) и (14), соответственно.
цикла формы волны входного вала, соответственно, точка k1 управления в точке Е1 и точка k2 управления в точке Е2 являются К/4 и К3/4, соответственно. Таким образом, точка kA' управления в точке EA' и точка kВ' управления в точке EВ' вычисляются посредством следующих уравнений (13) и (14), соответственно.
[0315] Когда величина крутящего момента Т превышает эталонное значение τ (т.е., когда достигнута точка ЕА) во время приведения во вращательное движение вала W1 рулевого механизма в направлении CW, процесс перескакивает в точку kA' управления (точку EA'), вычисляемую посредством Уравнения (13) (S5120), и процесс S5100 пропуска заканчивается. После этого вал W1 рулевого механизма приводят во вращательное движение согласно форме волны входного вала посредством нормального процесса управления положением до тех пор, пока величина крутящего момента Т снова не превысит эталонное значение τ.
[0316] Как можно понять из того факта, что наклон формы волны входного вала изменяет направление при перескакивании из точки ЕА в точку EA', направление вращательного движения вала W1 рулевого механизма при этом перескакивании (т.е., в положении θА концевого упирания) изменяется на обратное. Дополнительно, поскольку угловое положение θА вала W1 рулевого механизма не изменяется до и после этого изменения направления движения на обратное, крутящий момент Т изменяется незначительно до и после этого изменения направления движения на обратное, и направление движения плавно изменяется на обратное без ударной нагрузки. Таким образом, можно выполнять испытание без неожиданного повреждения образца W или испытательного устройства 1 вследствие ударной нагрузки во время изменения направления движения на обратное.
[0317] <Модификации>
Вычисление точек kA' и kВ' управления в качестве целевых положений перескакивания посредством приведенных выше уравнений (13) и (14) в процессе S5110 основано на предпосылке, что форма волны входного вала симметрична относительно перпендикулярных линий Р1 и Р2 вблизи точек Е1 и Е2, соответственно. Однако, поскольку форма волны входного вала может быть настроена произвольно, форма волны входного вала не обязательно имеет описанную выше симметрию. Например, как показано на фиг. 40, когда форма волны входного вала вблизи точек Е1 и Е2 является асимметричной относительно перпендикулярной линии Р1, угловое положение θА' точки EA' (точки kA' управления), полученное посредством Уравнения (13), находится дальше вовне от положения θА концевого упирания (т.е., на расстоянии от центрального положения θС). Таким образом, в точке EA', значительный крутящий момент Т, который действует для перемещения углового положения θ20 назад по направлению к центральному положению θС, действует на вал W1 рулевого механизма. Таким образом, поскольку возникает внезапное увеличение крутящего момента Т (т.е., ударной нагрузки) при перескакивании из точки kA управления (точки ЕА) в точку kA' управления (точку EA'), незапланированная нагрузка действует на образец W, и достоверность результата испытания может быть ухудшена.
[0318] Модификация процесса S5110, которая будет описана ниже, эффективно предотвращает возникновение ударной нагрузки во время изменения направления движения на обратное даже тогда, когда испытание выполняется с асимметрией формы волны входного вала относительно перпендикулярных линий Р1 и Р2.
[0319] Фиг. 41 является блок-схемой последовательности операций, показывающей процедуру модификации процесса S5110 поиска целевых положений перескакивания. В этой модификации, сначала определяют возможную точку EA* целевого положения перескакивания, показанную на фиг. 40 (S5111). Как описано выше, в случае формы волны входного вала, асимметричной относительно перпендикулярной линии Р1, такой как форма волны, показанная на фиг. 40, если процесс управления перескакивает в точку EA' точки kA' управления, полученной посредством уравнения (13), то может возникнуть ударная нагрузка. Таким образом, в настоящей модификации, точка EA*, которая является точкой, расположенной дальше вперед относительно точки EA' (точкой, чье значение точки k управления является большим), настраивают в качестве возможной точки. Конкретно, точка kA* управления возможной точки EA* вычисляется посредством следующего уравнения (15).

где α является положительным числом.
[0320] Затем вычисляют угловое положение θА* возможной точки ЕА* на основании точки kA* управления возможной точки ЕА*, полученной посредством уравнения (15), и формы волны входного вала, и определяют, является ли угловое положение θА* возможной точки ЕА* достаточно близким к положению θА концевого упирания (т.е., является ли угловое положение θА* близким к положению θА концевого упирания до такой степени, что ударная нагрузка, которая может повлиять на результат испытания, не возникнет при перескакивании в возможную точку ЕА*) (S5112). Конкретно, то, является ли угловое положение θА* возможной точки ЕА* достаточно близким к положению θА концевого упирания, определяется тем, удовлетворяется ли следующее неравенство (16) (т.е., является ли отклонение углового положения θА* от положения θА концевого упирания меньшим или равным эталонному значению δθА).
[0321]
где δθА является положительной постоянной (эталонным значением для процесса S5112 определения).
[0322] Если угловое положение θА* возможной точки ЕА* является достаточно близким к положению θА концевого упирания (S5112: ДА), то процесс S5110 поиска целевого положения перескакивания заканчивается. Если угловое положение θА* является недостаточно близким к положению θА концевого упирания (S5112: НЕТ), то точку kA* управления увеличивают на единицу, и возможную точку ЕА* перемещают по направлению к точке Е1 (S5114). Затем процесс возвращается к процессу S5112, и определяют, является ли угловое положение θА* возможной точки ЕА* достаточно близким к положению θА концевого упирания после перемещения. Процессы S5112 и S5114 повторяют до тех пор, пока не будет определено, что угловое положение θА* возможной точки ЕА* является достаточно близким к положению θА концевого упирания. В форме волны входного вала, показанной на фиг. 40, когда возможная точка ЕА* достигает точки EA'' (или ее окрестности), определяют, что угловое положение θА* возможной точки ЕА* является достаточно близким к положению θА концевого упирания.
[0323] В описанной выше модификации, поскольку точка управления перескакивает после подтверждения того, что угловое положение θА'' точки EA'' целевого положения перескакивания является достаточно близким к положению θА концевого упирания (текущее положение), можно более надежно предотвратить ударную нагрузку, генерируемую при изменении направления вращения вала W1 рулевого механизма на обратное.
[0324] В описанной выше модификации, первая возможная точка ЕА* настраивается на внутренней стороне положения θА концевого упирания (на стороне центрального положения θС), и целевое положение перескакивания ищут от внутренней стороны по направлению к внешней стороне (вверх на графике фиг. 40, как указано стрелкой М), но настоящее изобретение не ограничено этой конфигурацией. В противоположность описанной выше модификации, целевое положение перескакивания может искаться от точки, находящейся снаружи положения θА концевого упирания (например, точки Е1 или точки EA'), по направлению вовнутрь.
[0325] Следует отметить, что при выполнении поиска с точкой Е1 в качестве начальной точки, начальная точка может быть легко настроена, но расстояние (число точек управления) до точки EA'', которая является точкой, которая должна быть достигнута посредством поиска, является большим расстояния до точки EA* или точки EA', и, таким образом, объем вычислений, требуемых для поиска целевого положения перескакивания, увеличивается. Таким образом, можно эффективно искать целевое положение перескакивания посредством настройки точки, расположенной впереди точки Е1 (т.е., точки, имеющей большее число точек управления), в качестве начальной точки.
[0326] Дополнительно, направление поиска целевого положения перескакивания (т.е., направление, в котором возможная точка ЕА* перемещается в процессе S5114) должно быть, конечно, направлением, в котором возможная точка ЕА* приближается к достижимой точке EA'' поиска. В описанной выше модификации, постоянная α для определения возможной точки ЕА* первого целевого положения перескакивания настраивается на большое значение, чтобы возможная точка ЕА* всегда настраивалась впереди (на правой стороне на фиг. 40) достижимой точки EA'' поиска. Таким образом, в процессе S5114 безусловно выполняется процесс уменьшения числа точек управления и перемещения возможной точки ЕА* влево на фиг. 40. Однако, когда постоянная α настраивается на относительно малое значение, или когда возможная точка ЕА* в качестве первого целевого положения перескакивания настраивается, например, на точку EA' (расстояние от которой до перпендикулярной линии Р1 является таким же, как расстояние от точки ЕА до перпендикулярной линии Р1), поскольку возможная точка ЕА* расположена на левой стороне достижимой точки EA'' поиска на фиг. 40, в процессе S5114 необходимо переместить возможную точку ЕА* вправо. Таким образом, в таком случае, например, необходимо обеспечить процесс определения позиционного соотношения между возможной точкой ЕА* достижимой точки EA'' поиска (соотношения величин точек k управления) и определить направление, в котором возможная точка ЕА* должна быть перемещена, согласно результату определения.
[0327] Выше приведено описание вариантов осуществления настоящего изобретения. Варианты осуществления настоящего изобретения не ограничены вариантами осуществления, описанными выше, и возможны различные модификации. Например, конфигурации, полученные соответствующим объединением конфигураций вариантов осуществления и т.п., явно показанных в описании настоящего изобретения, и/или конфигурации вариантов осуществления и т.п., очевидные специалистам в данной области техники из описания настоящего изобретения, также включены в варианты осуществления настоящей заявки.
[0328] В вышеупомянутом варианте осуществления, в процессе Sa20 управления нагрузкой преобразованное значение угловой скорости (Tr*ω20/r63), вычисляемое на основании угловой скорости ω20 приводной части 20 входной стороны, используется в качестве целевого значения (Sa2012) только в случае первого цикла управления (Sа2010: ДА). Однако, процесс Sа2012 может быть применен к множеству начальных циклов управления.
[0329] В описанном выше варианте осуществления, в процессе S9 управления концевым упиранием выполняется процесс управления для увеличения крутящего момента Т один раз до максимального крутящего момента Т1 и затем для постепенного его изменения до крутящего момента Т2 удержания. Однако, этот процесс может быть исключен, и крутящий момент Т2 удержания может быть настроен в качестве целевого значения изначально для выполнения процесса S11 управления крутящим моментом.
[0330] В вышеупомянутом варианте осуществления, в процессе S9 управления концевым упиранием крутящий момент Т2 удержания настроен на значение, меньшее максимального крутящего момента Т1, но крутящий момент Т2 удержания может быть настроен на значение, большее максимального крутящего момента Т1.
[0331] В описанном выше варианте осуществления, поведение всего испытательного устройства 1 определяется одним образцом формы волны, но таблица последовательности может быть составлена из множества образцов форм волн, которые определяют разные частичные поведения испытательного устройства 1 (например, из трех образцов форм волн, а именно, образца формы волны входной стороны, образца формы волны правой выходной стороны и образца формы волны левой выходной стороны, которые, соответственно, определяют поведения приводной части 20 входной стороны, приводной части 60R выходной стороны и приводной части 60L выходной стороны).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ КОЛЕС | 2021 |
|
RU2824533C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819075C2 |
| Стенд для испытания механизмов возвратно-поступательного действия | 2021 |
|
RU2791459C2 |
| ОПРЕДЕЛЕНИЕ ФАЗЫ ЗАГОТОВКИ ДЛЯ СТАНКА СО ШПИНДЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2293011C2 |
| ВСПОМОГАТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 2008 |
|
RU2483959C2 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЭЛЕКТРИЧЕСКОГО РУЛЕВОГО УПРАВЛЕНИЯ С УСИЛИТЕЛЕМ ДЛЯ АВТОМОБИЛЯ | 2013 |
|
RU2619500C2 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
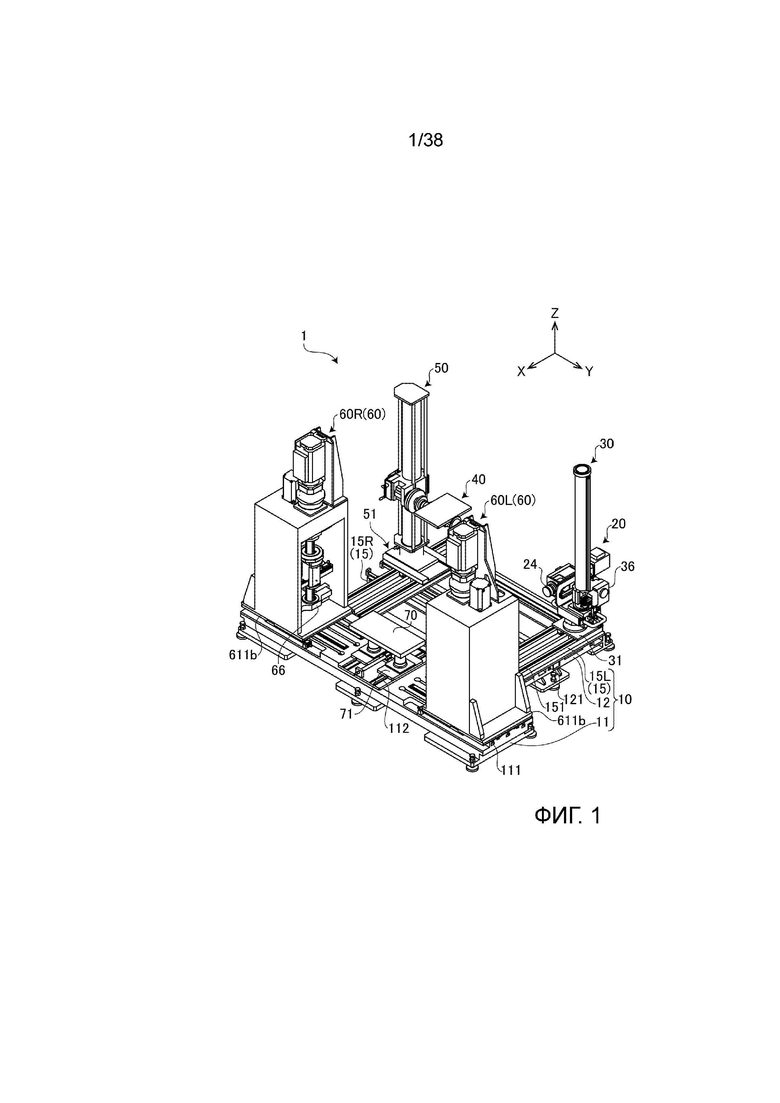
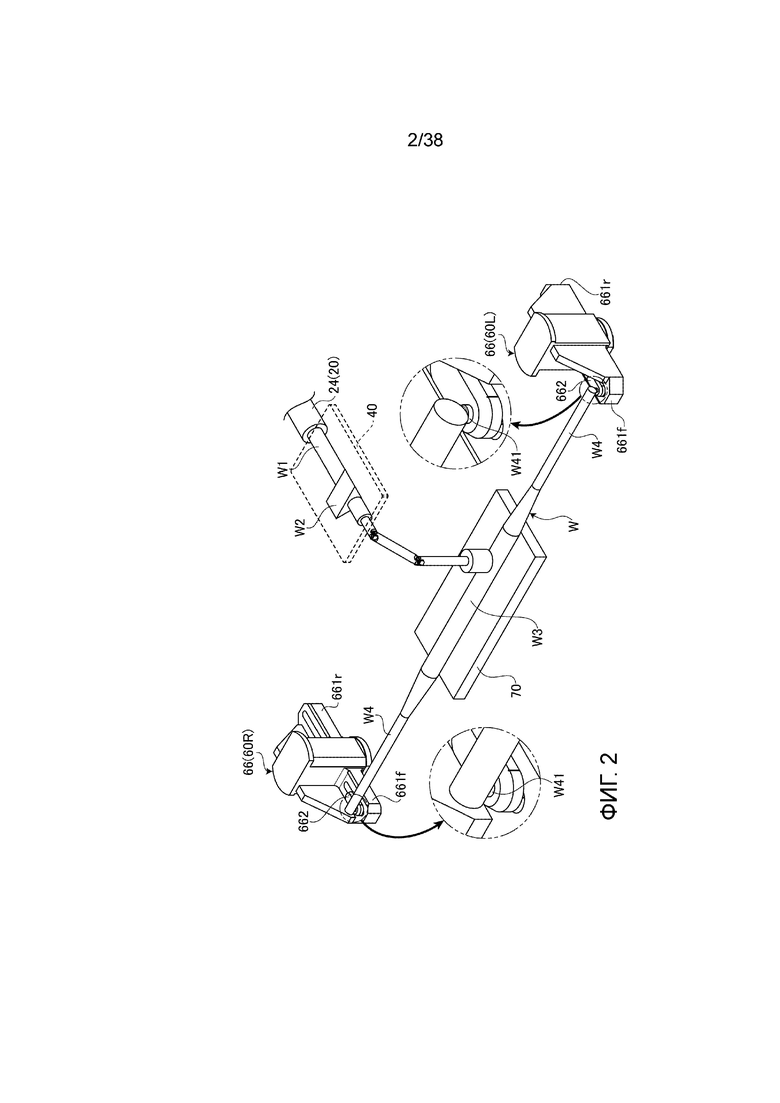
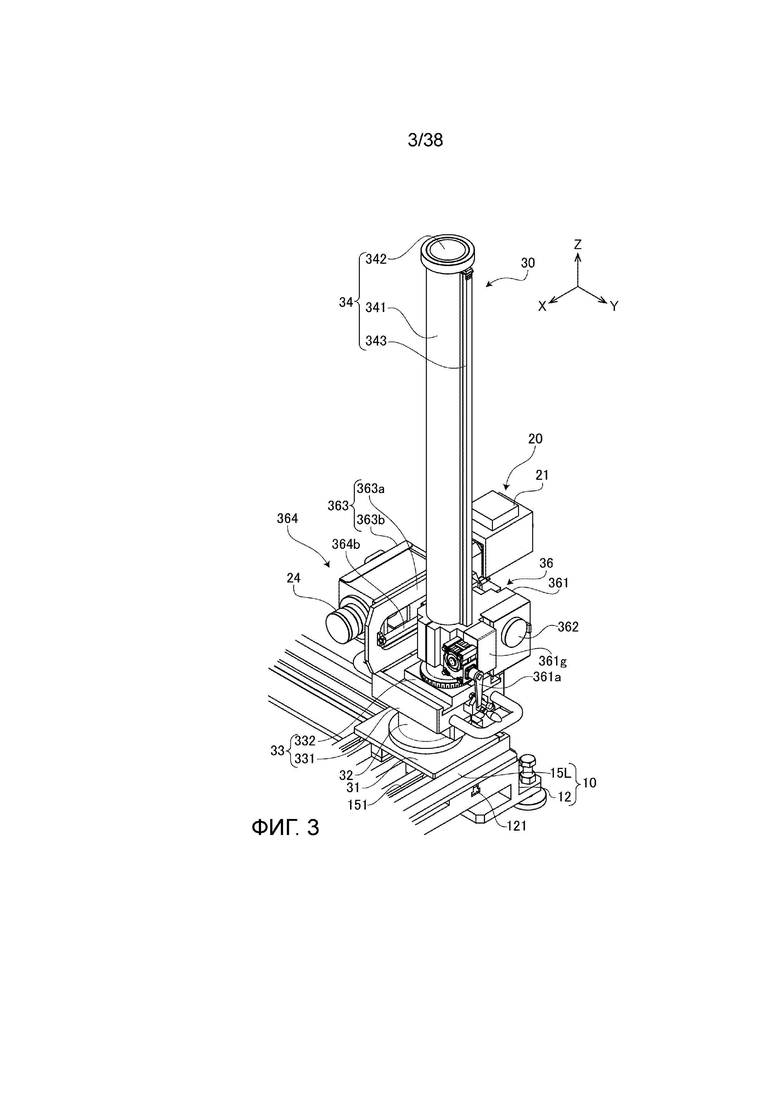
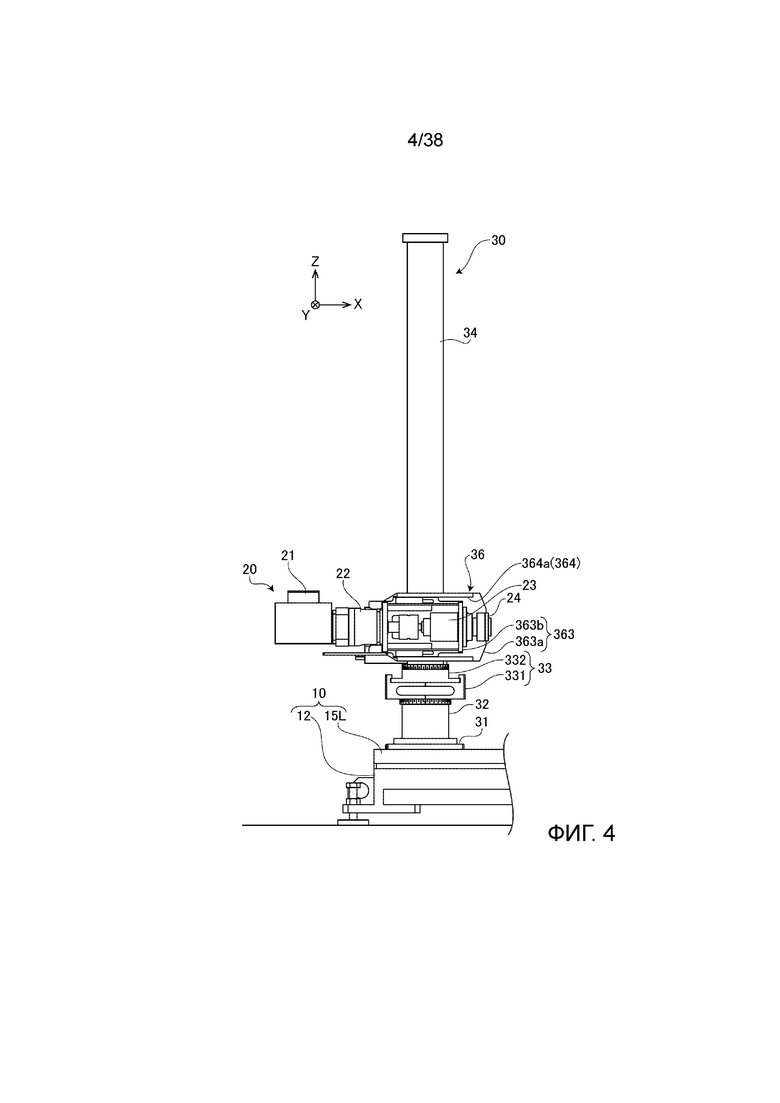
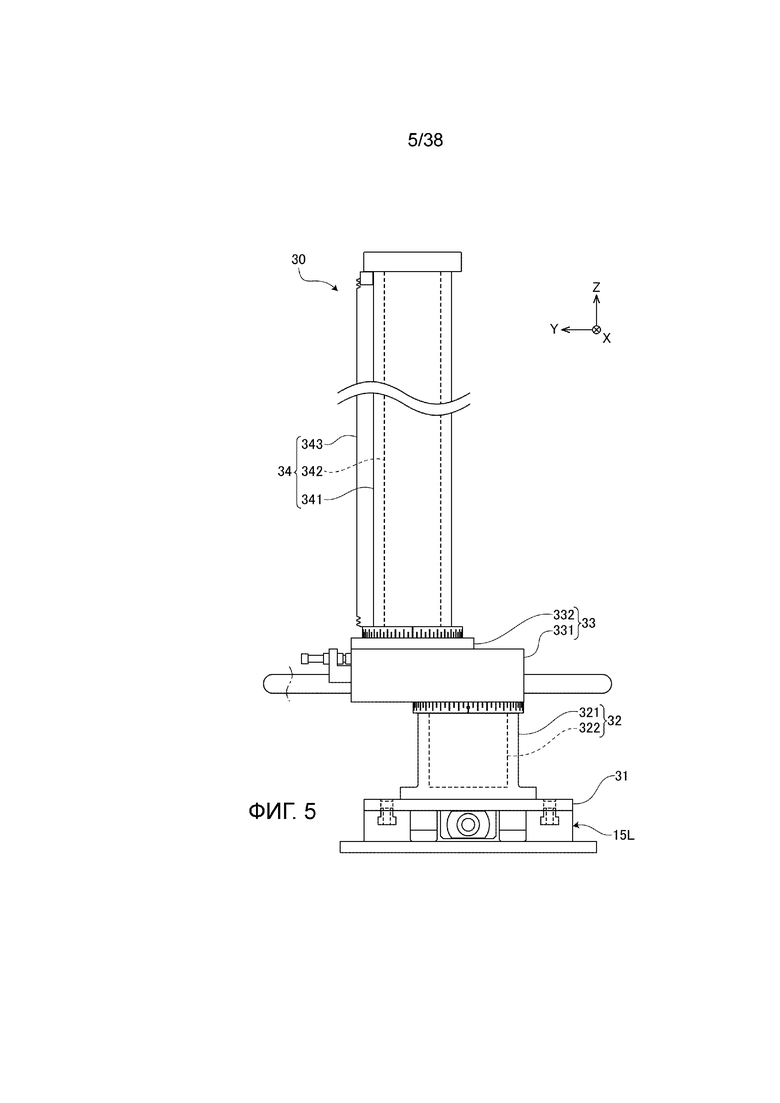
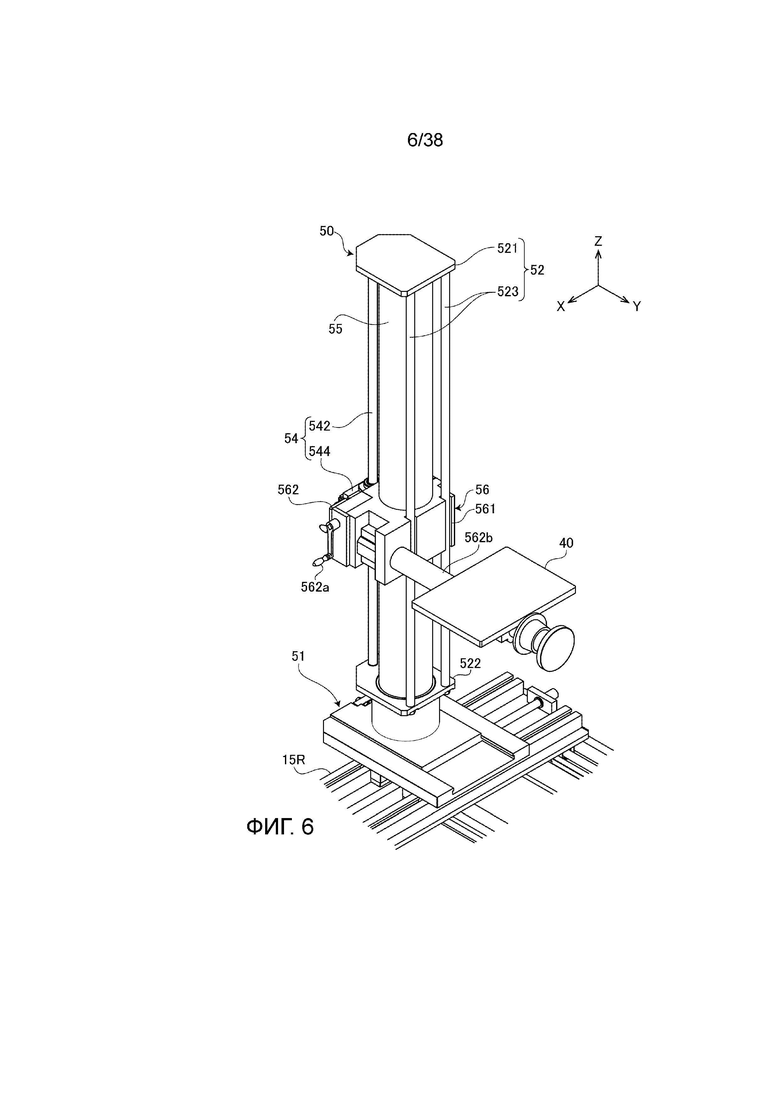
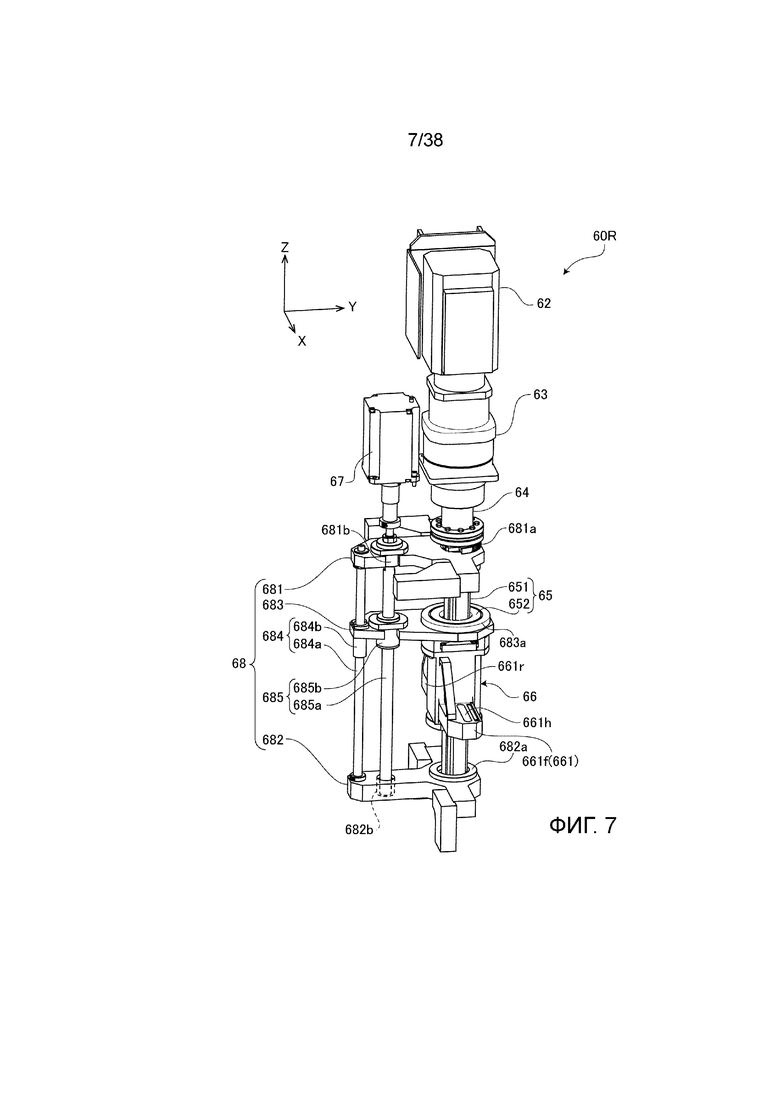
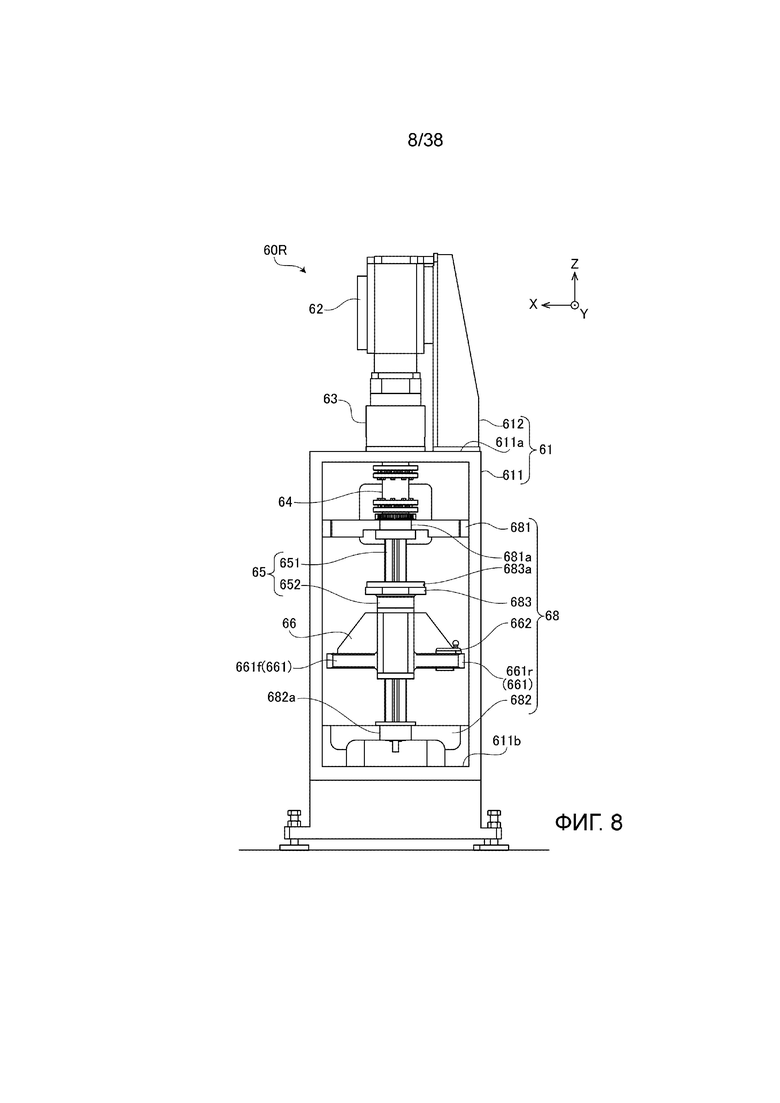
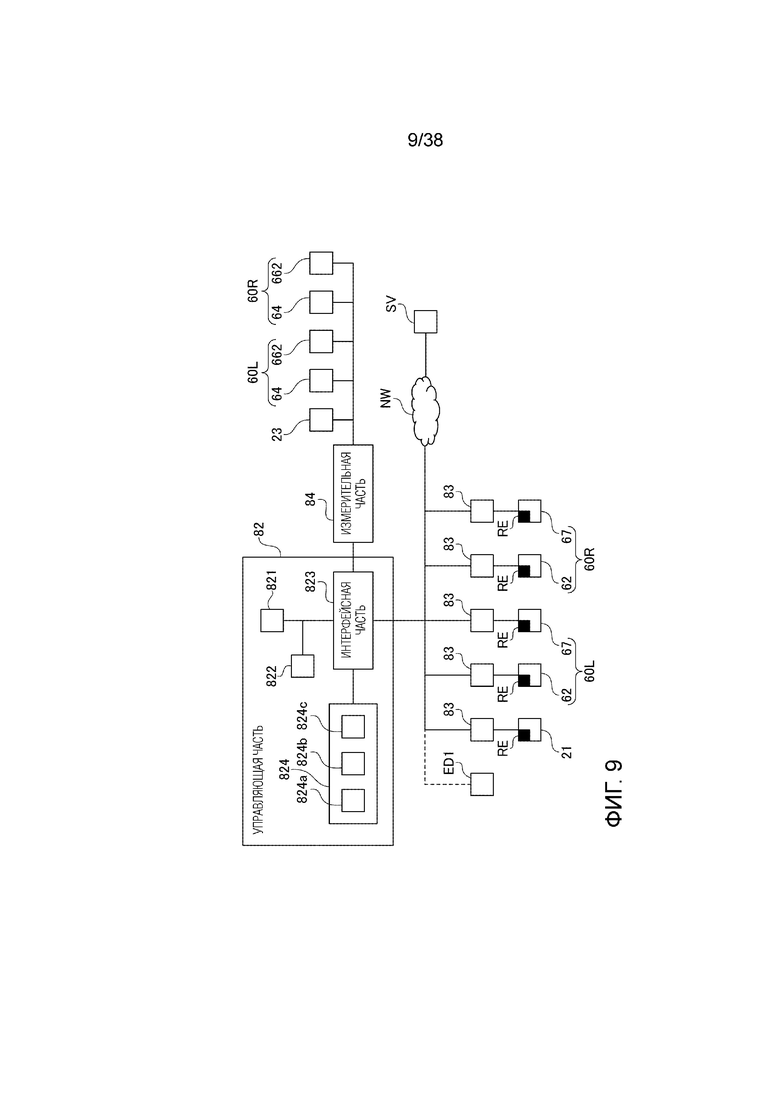
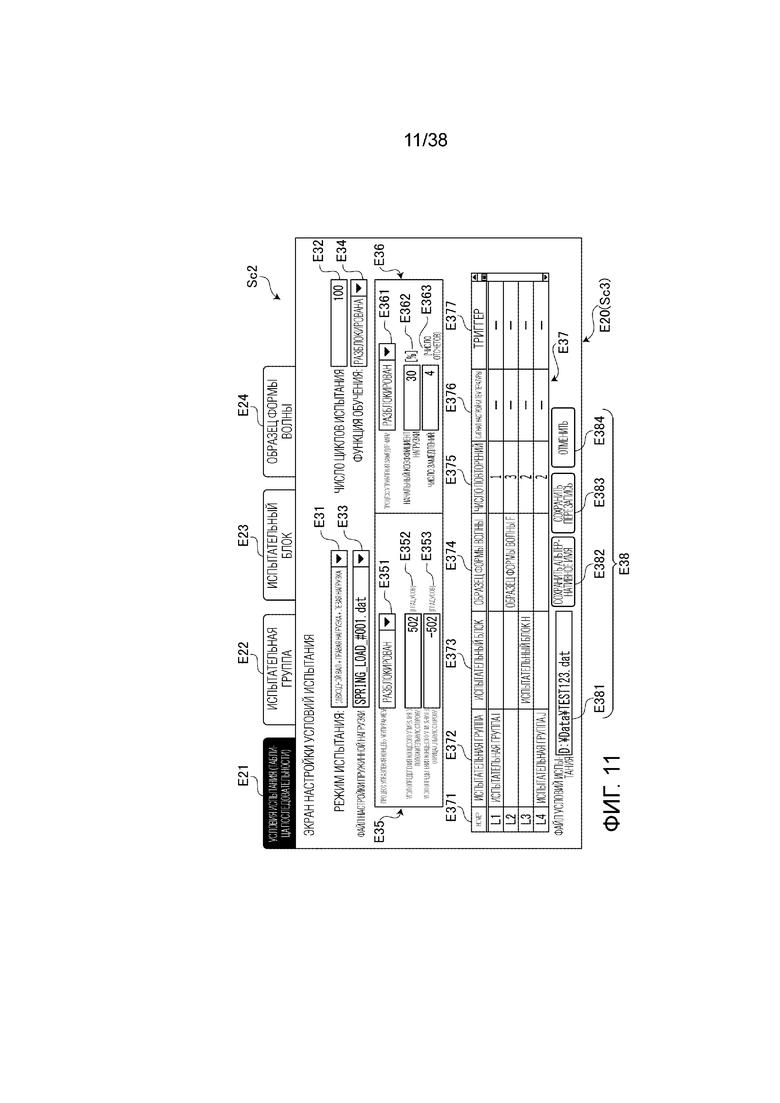
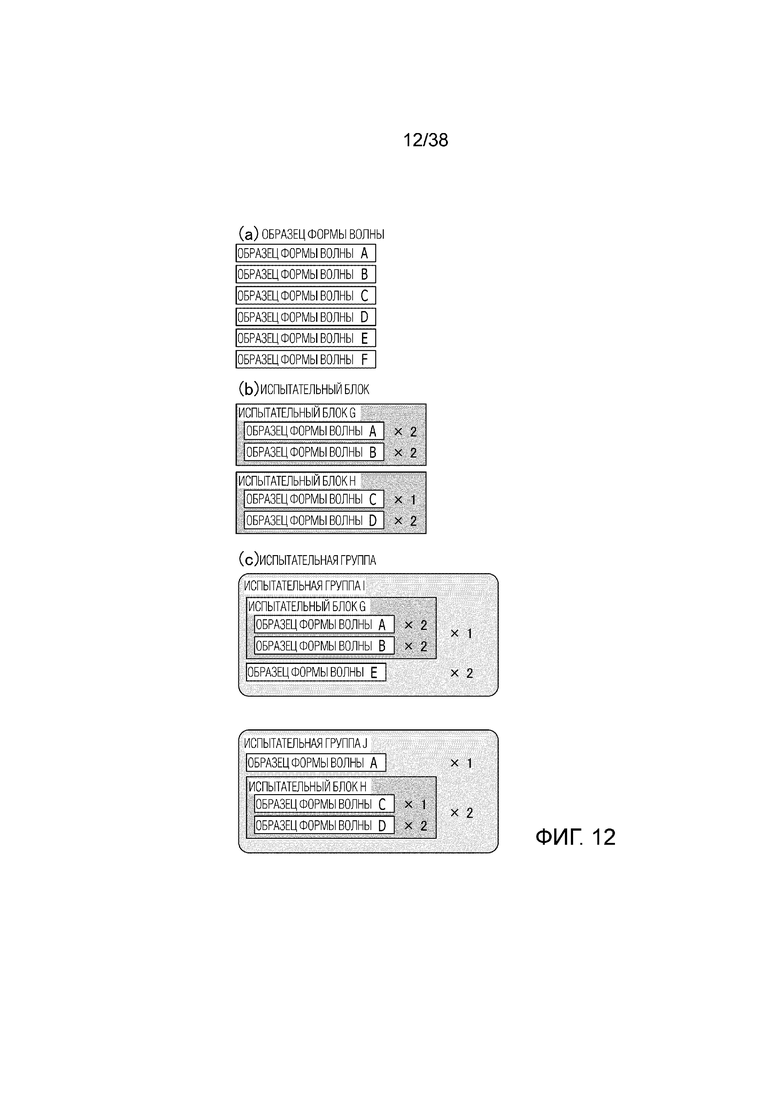
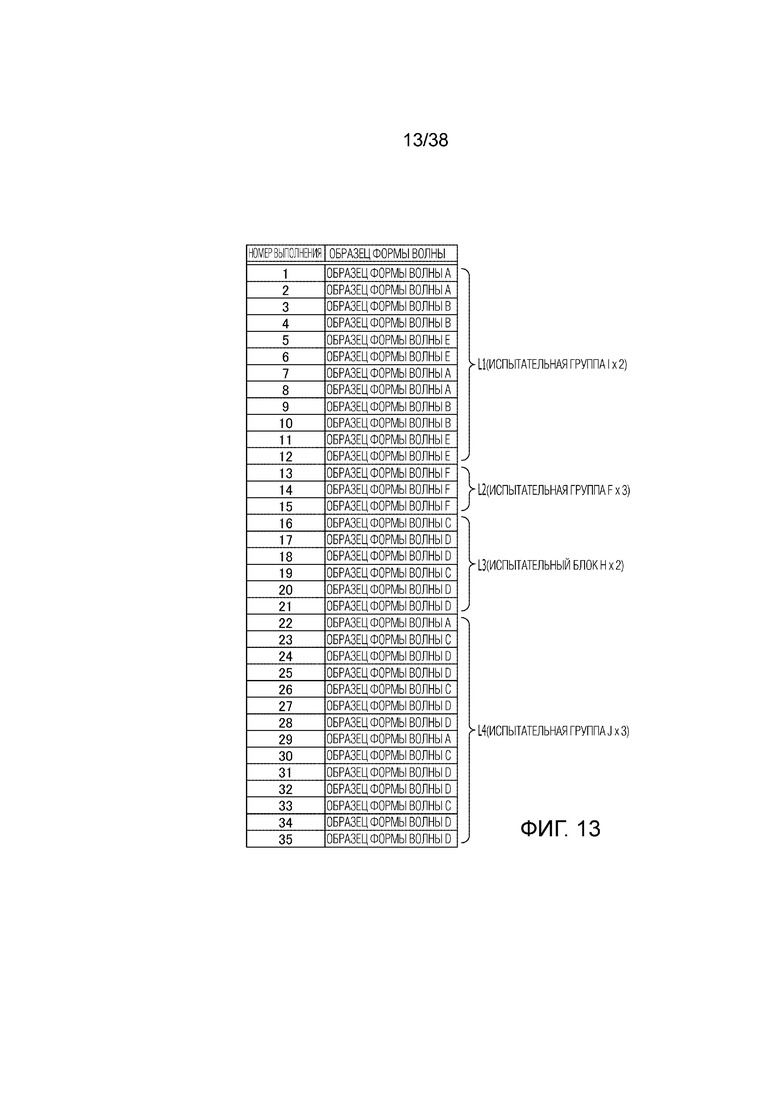
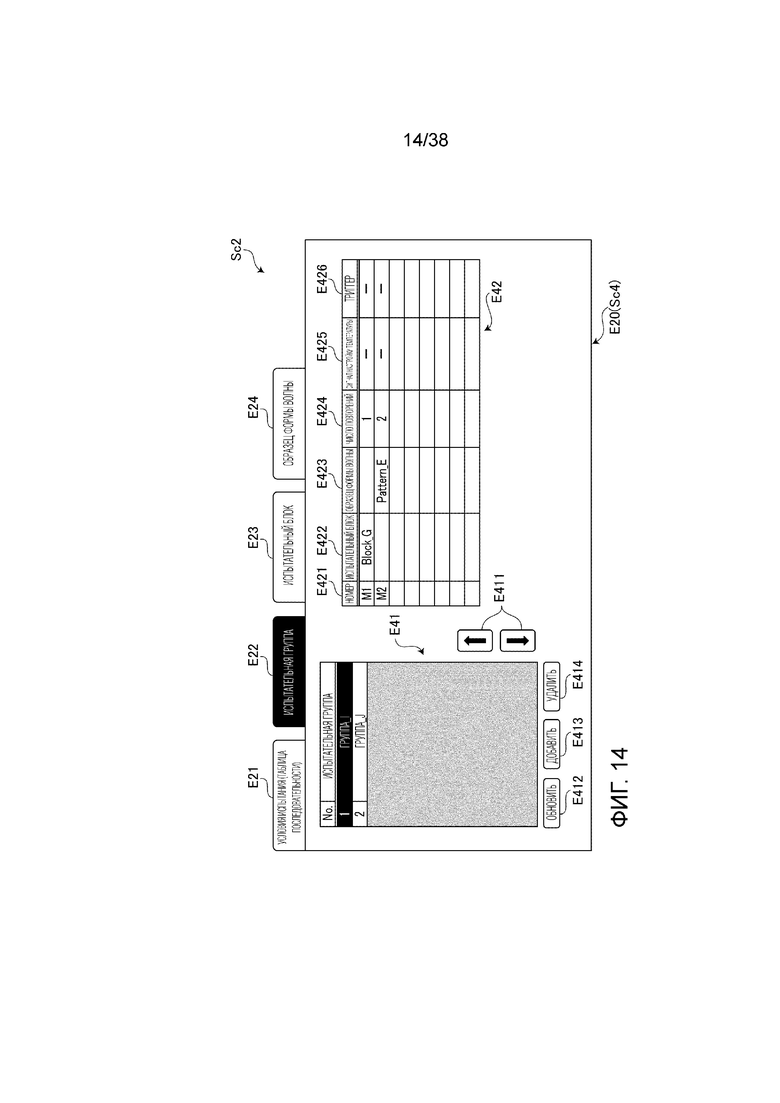
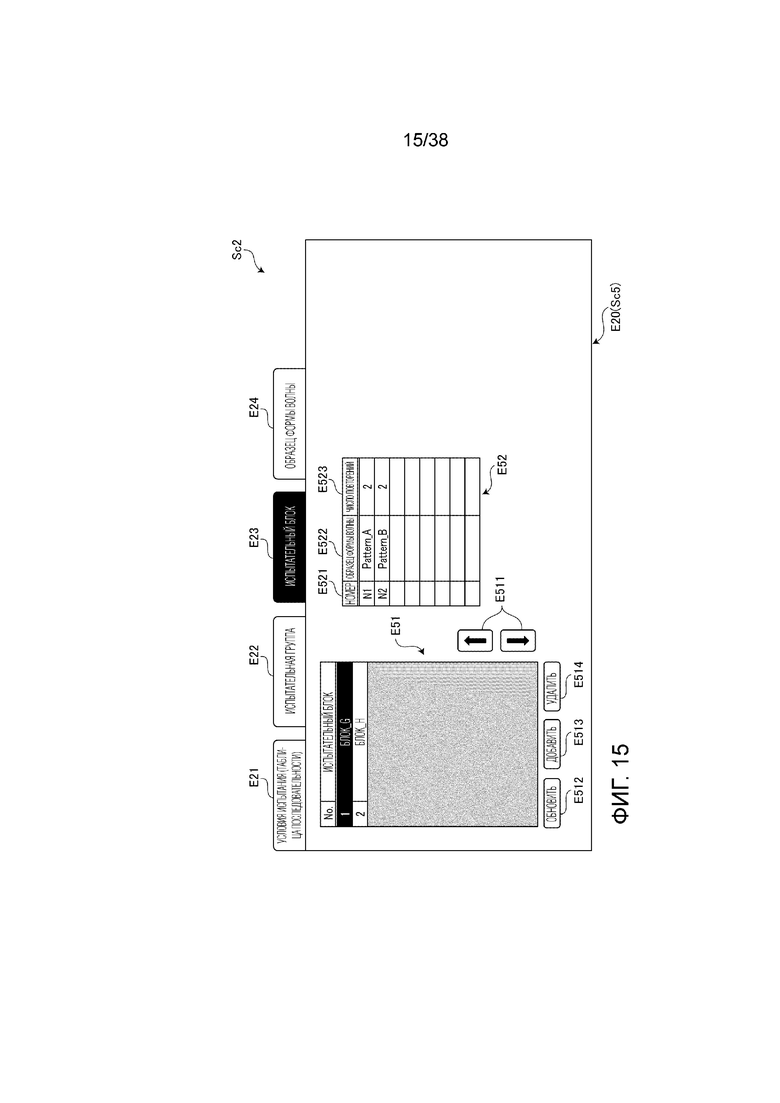
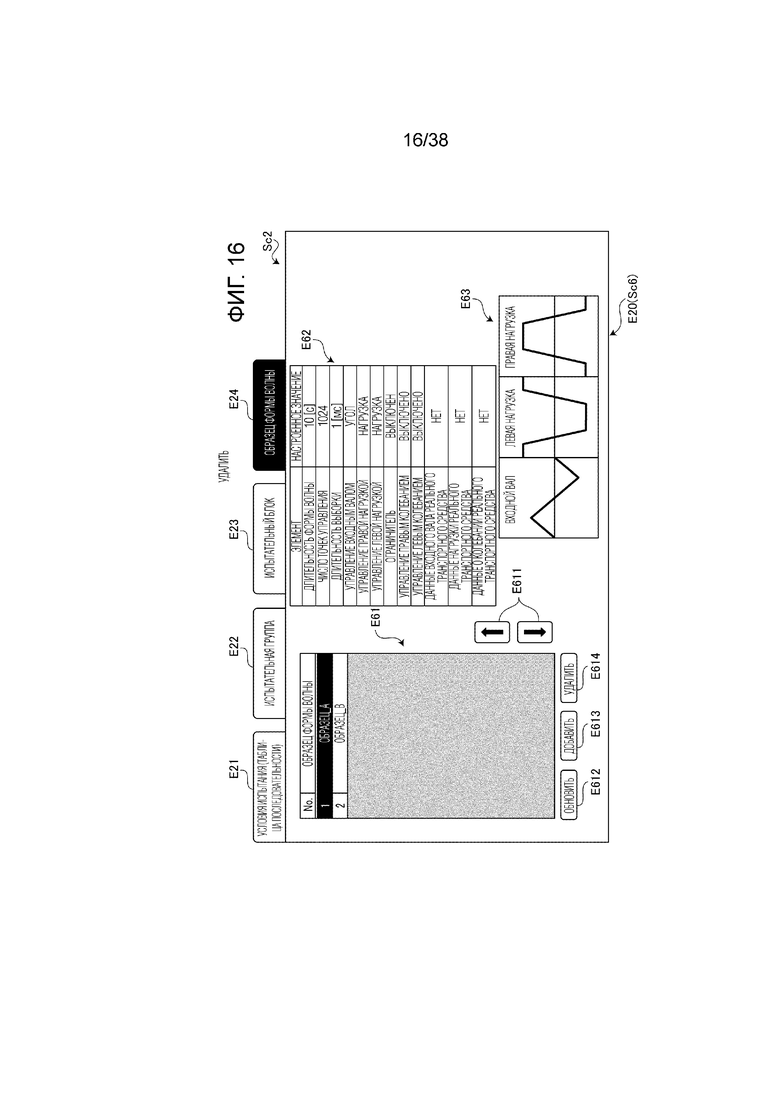
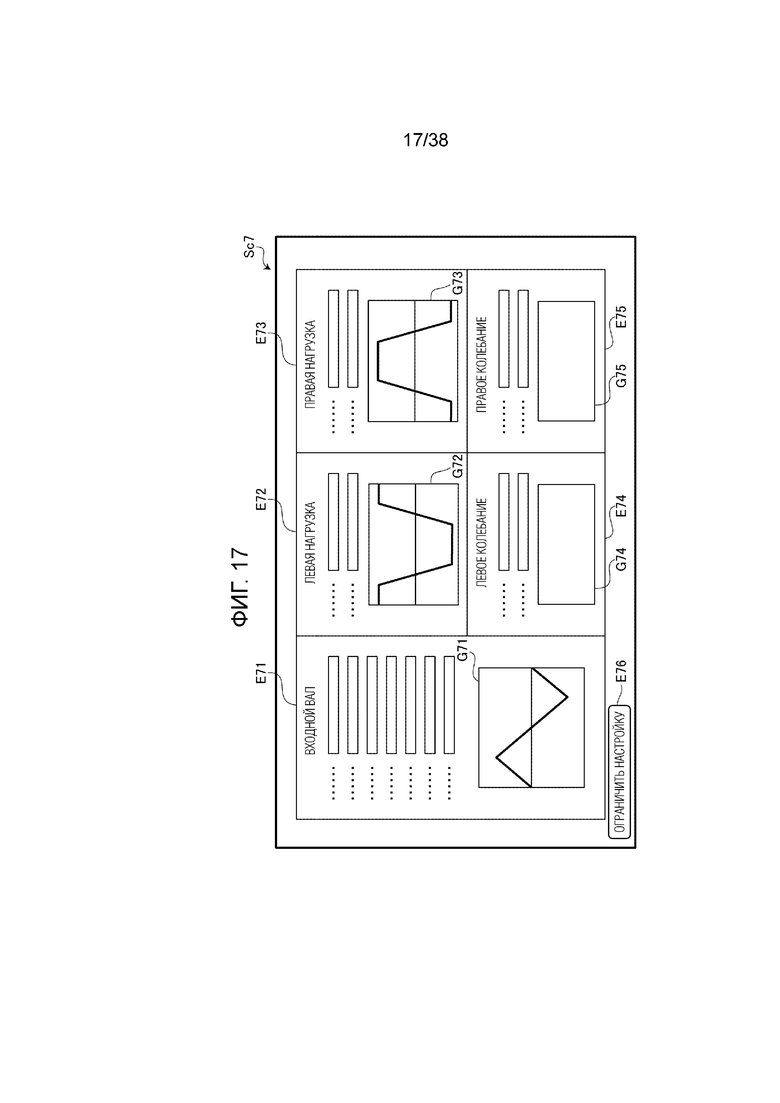
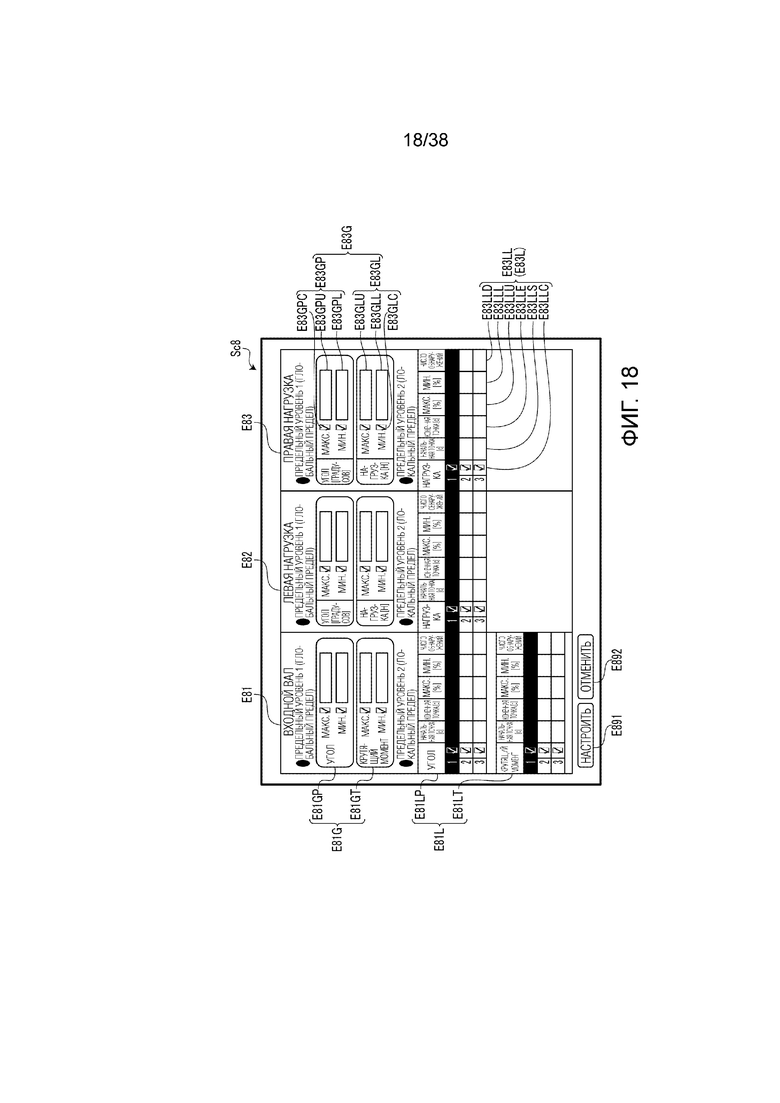
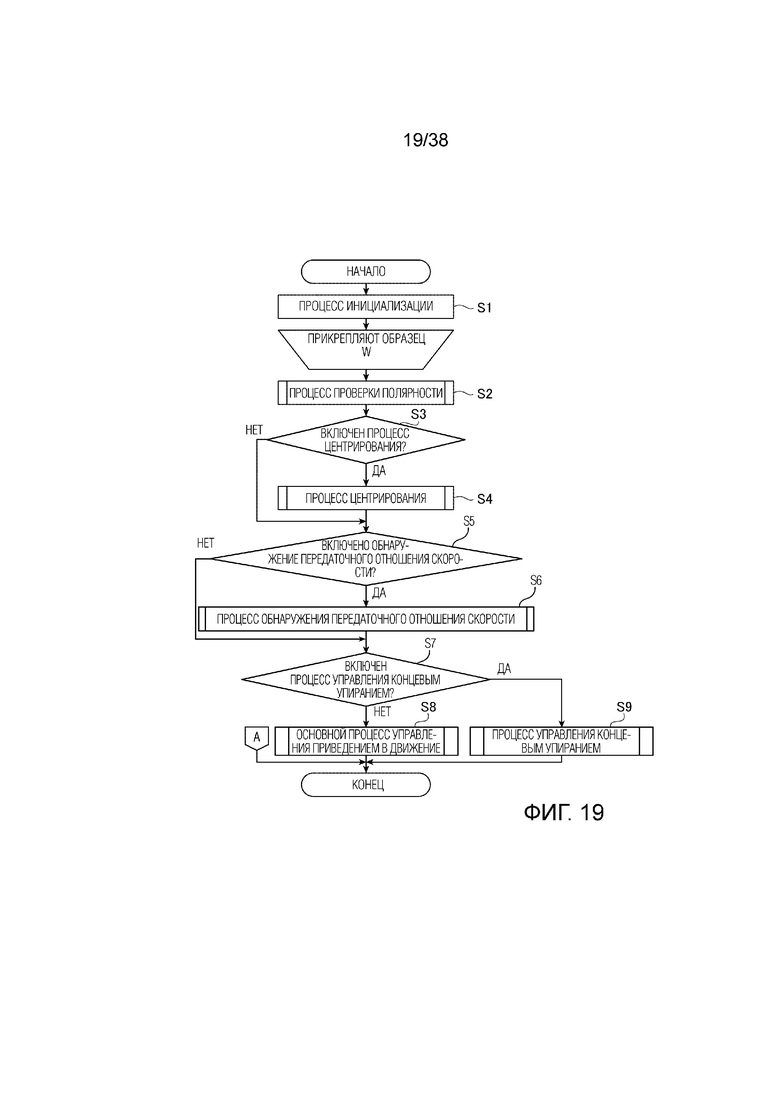
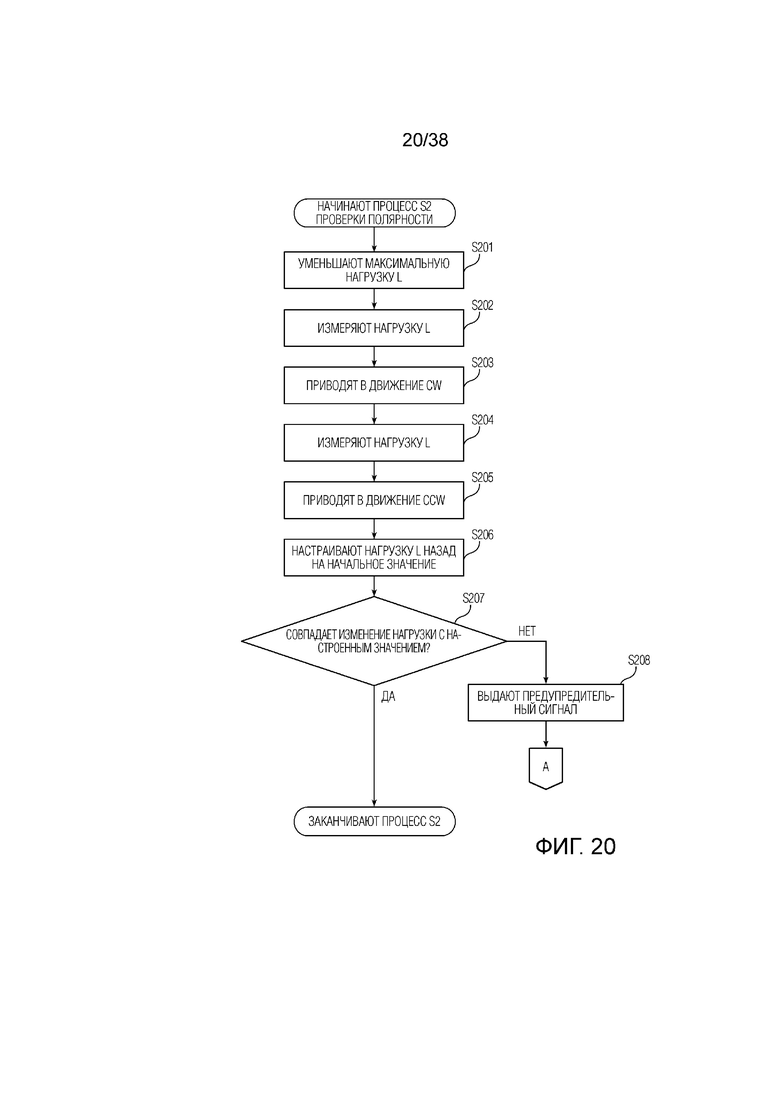
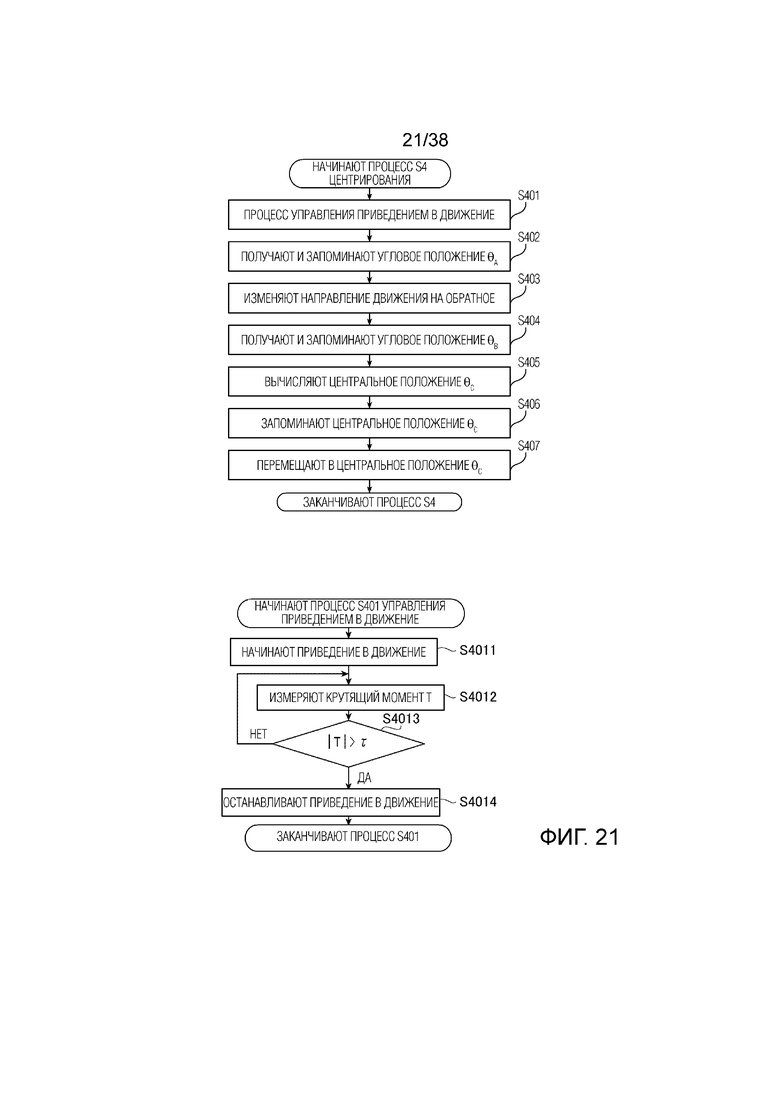
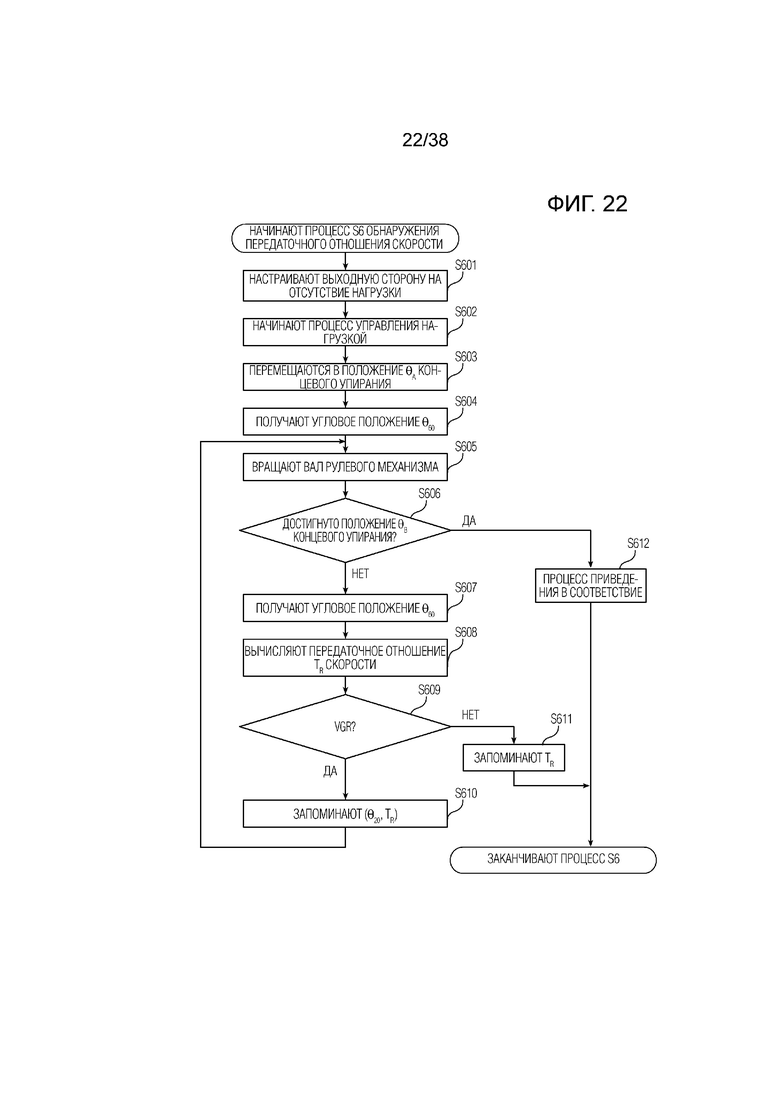
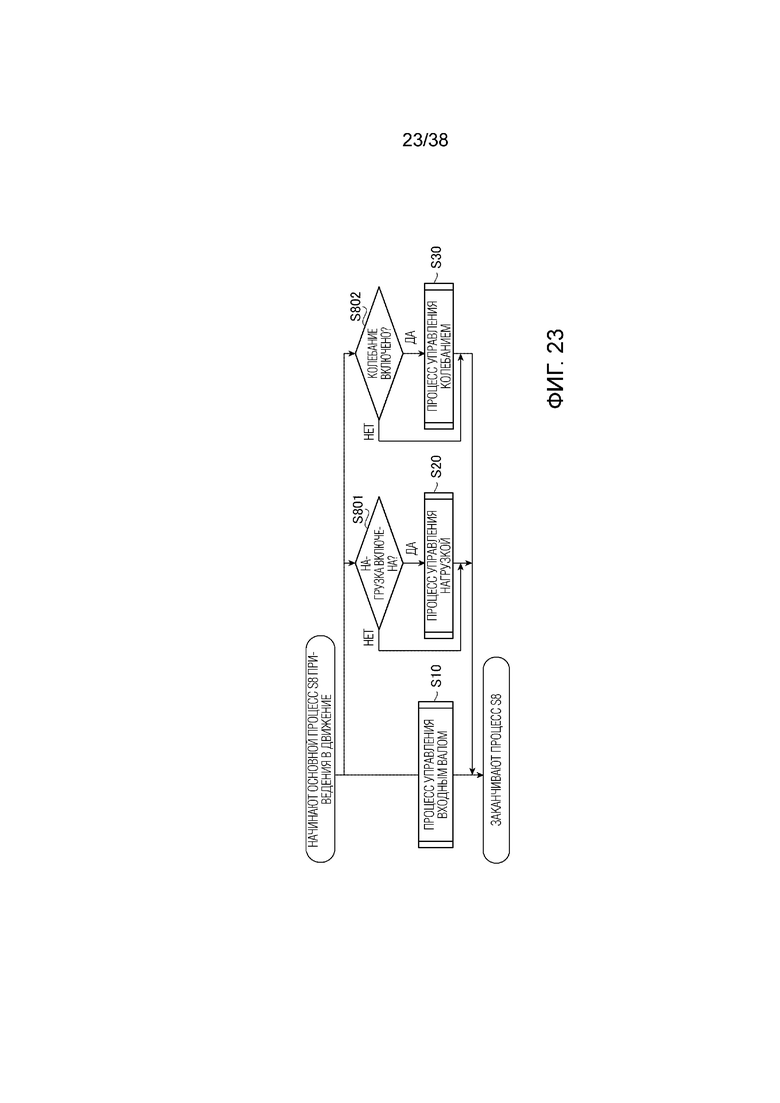
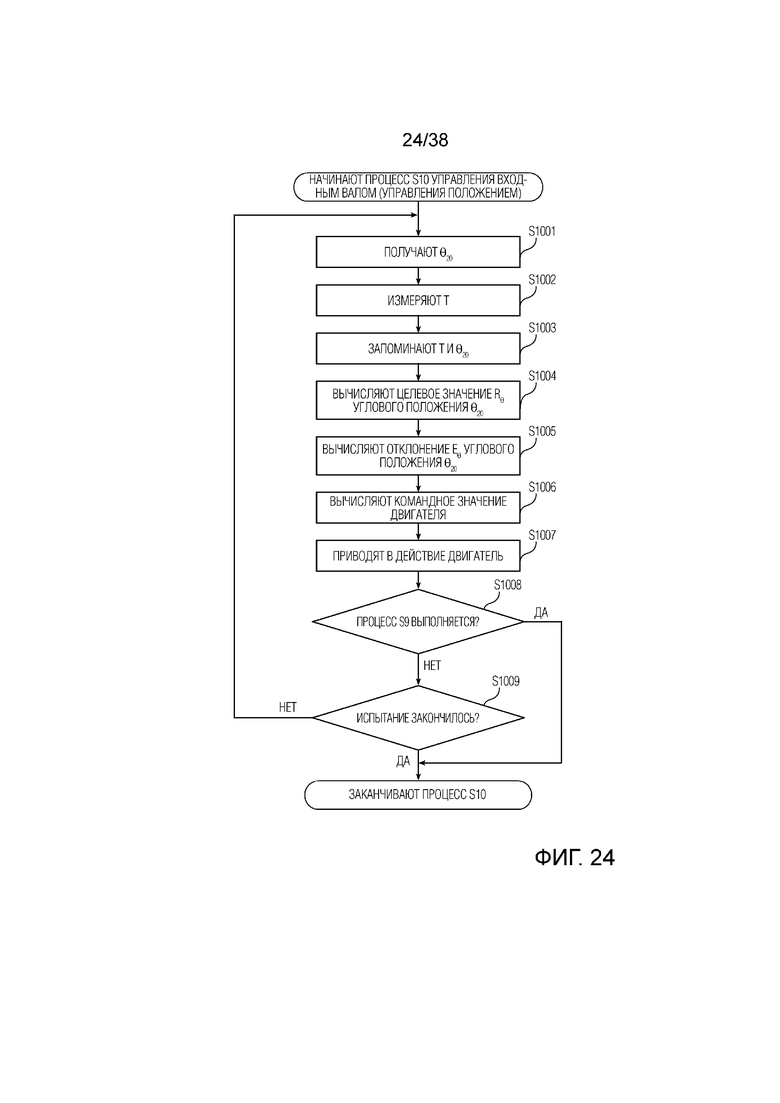
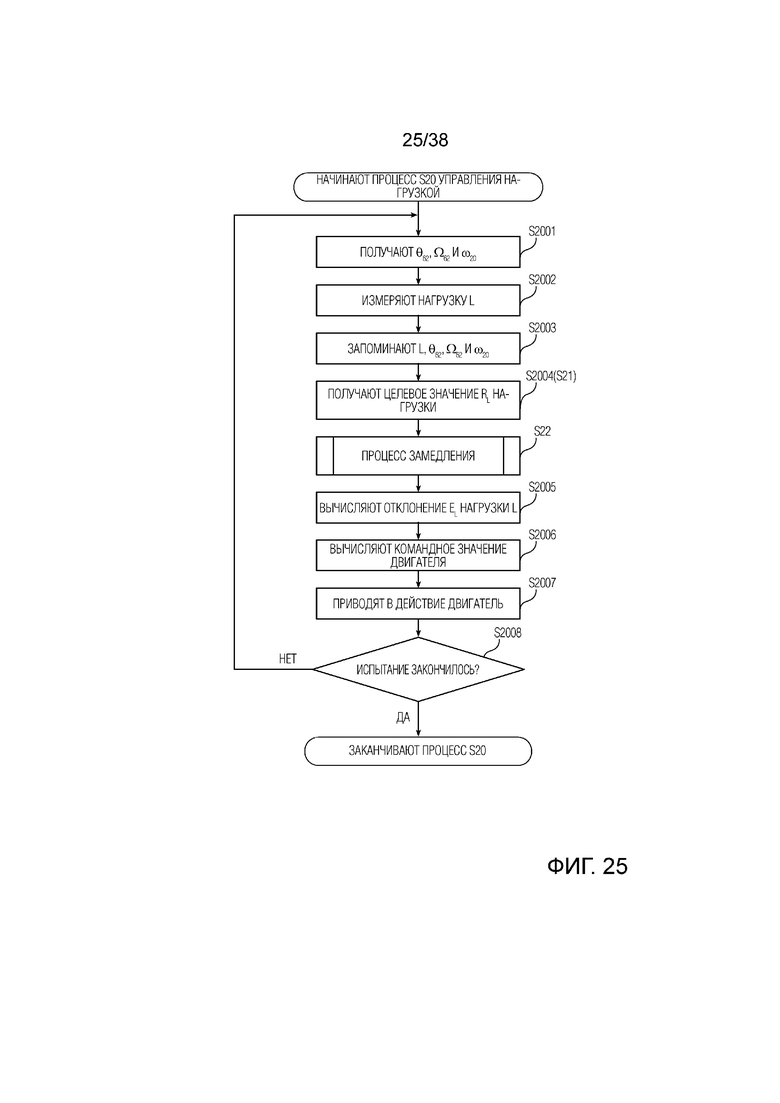
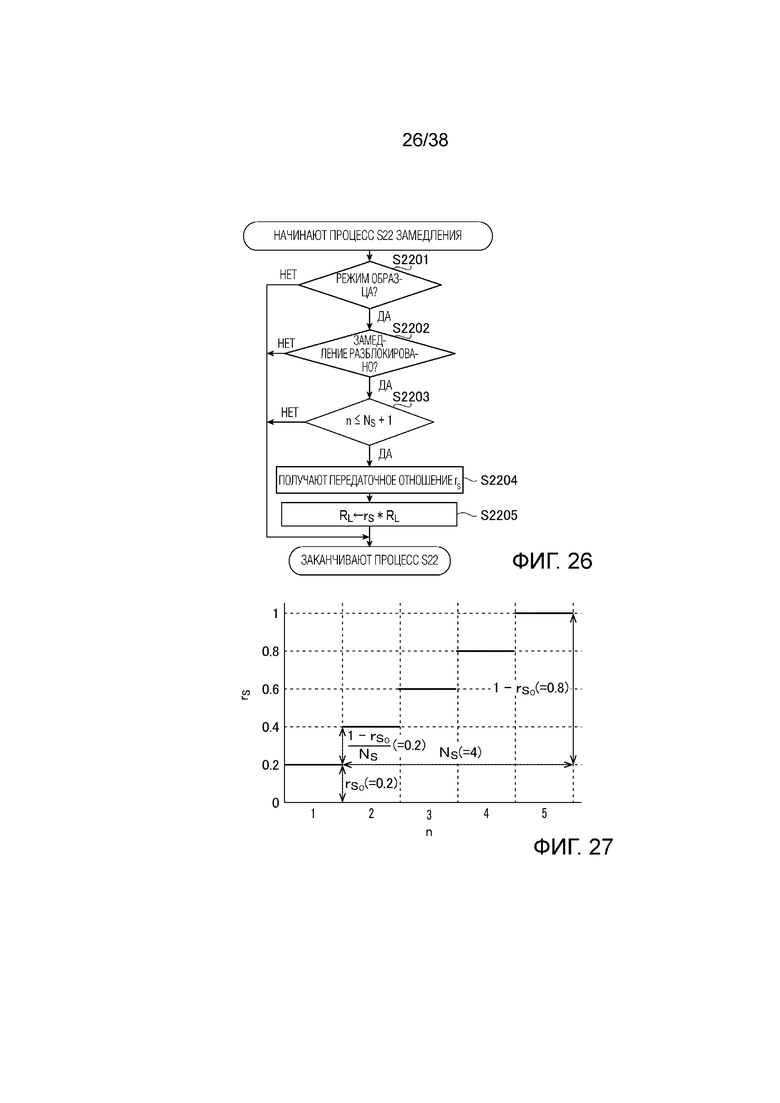
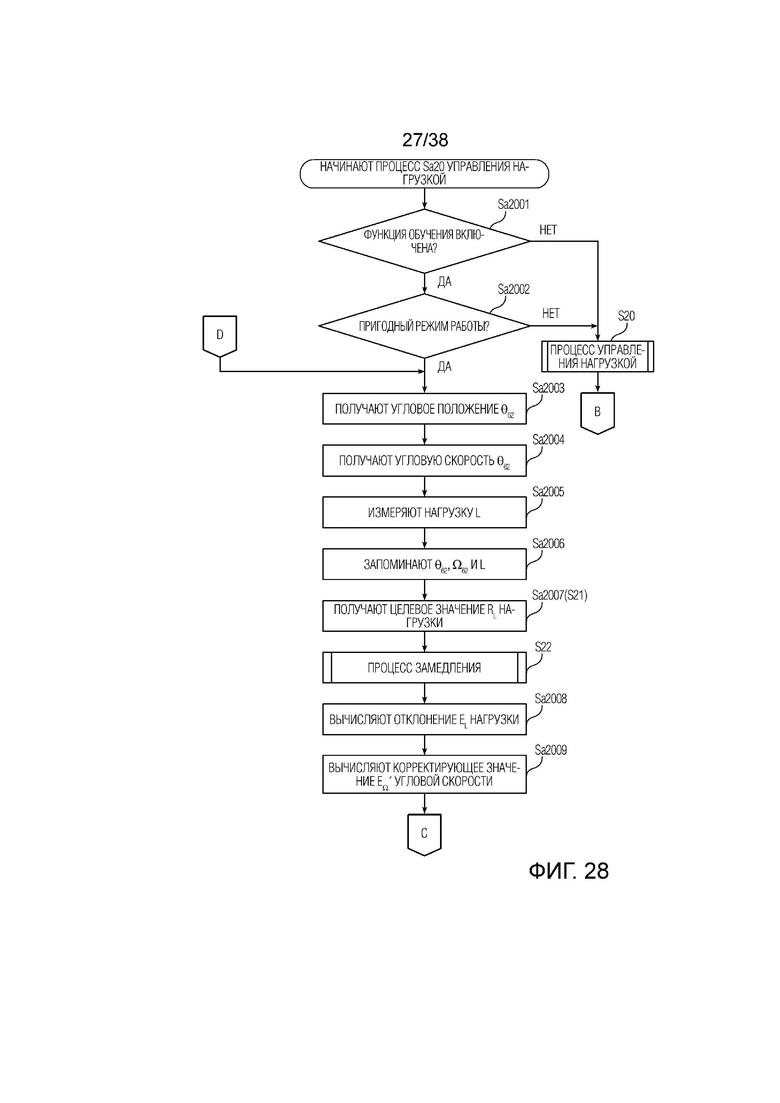
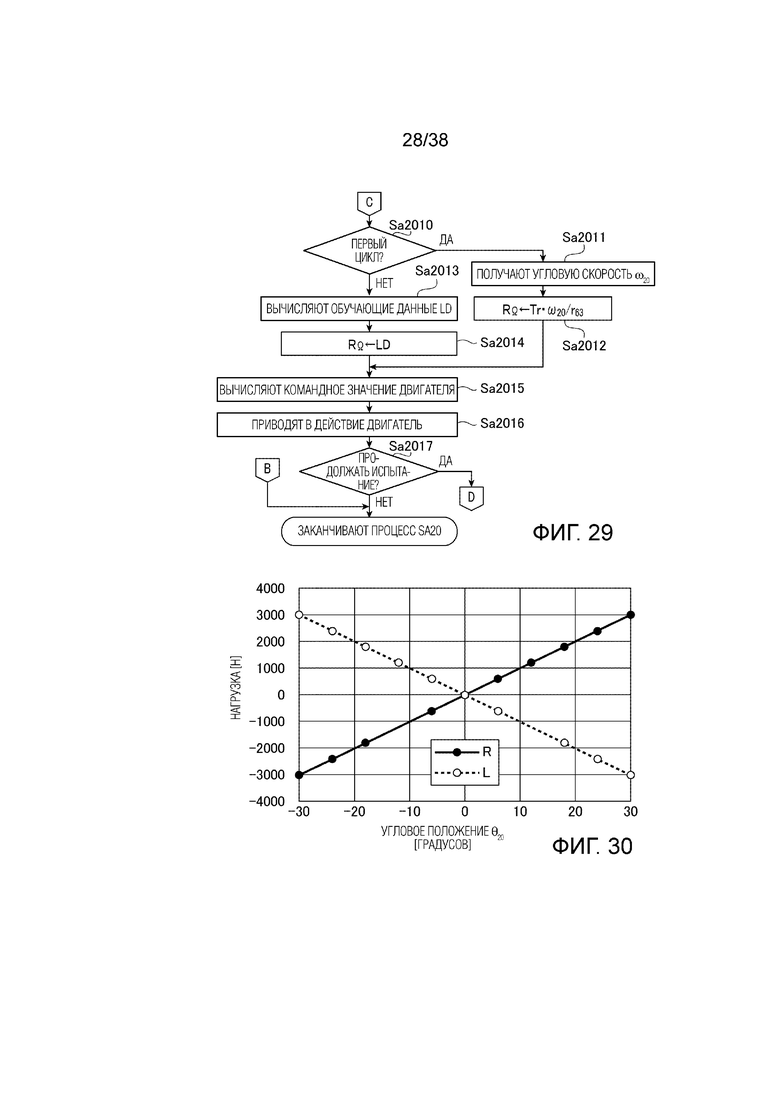
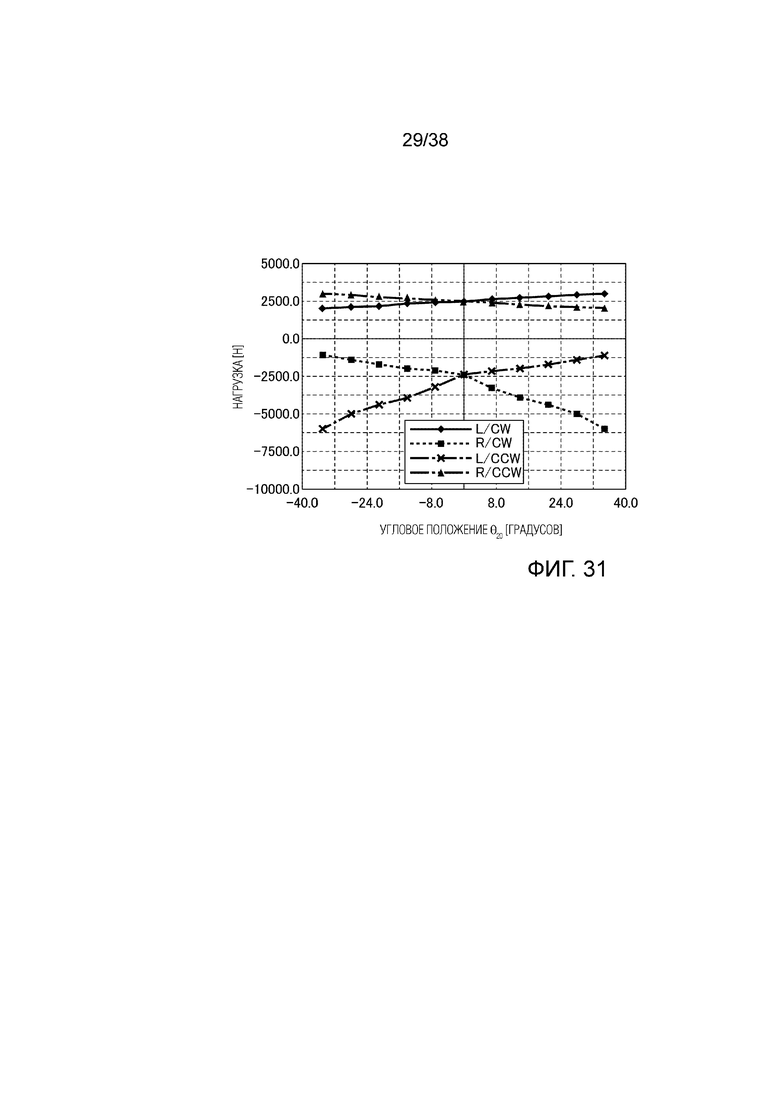
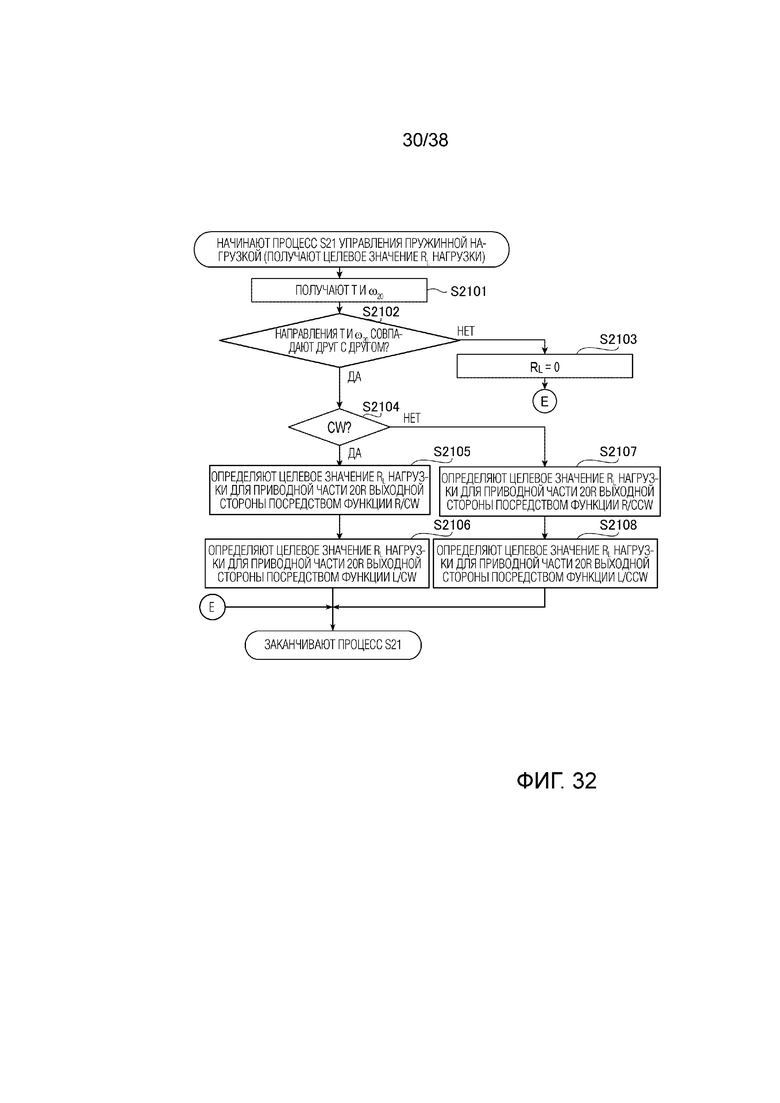
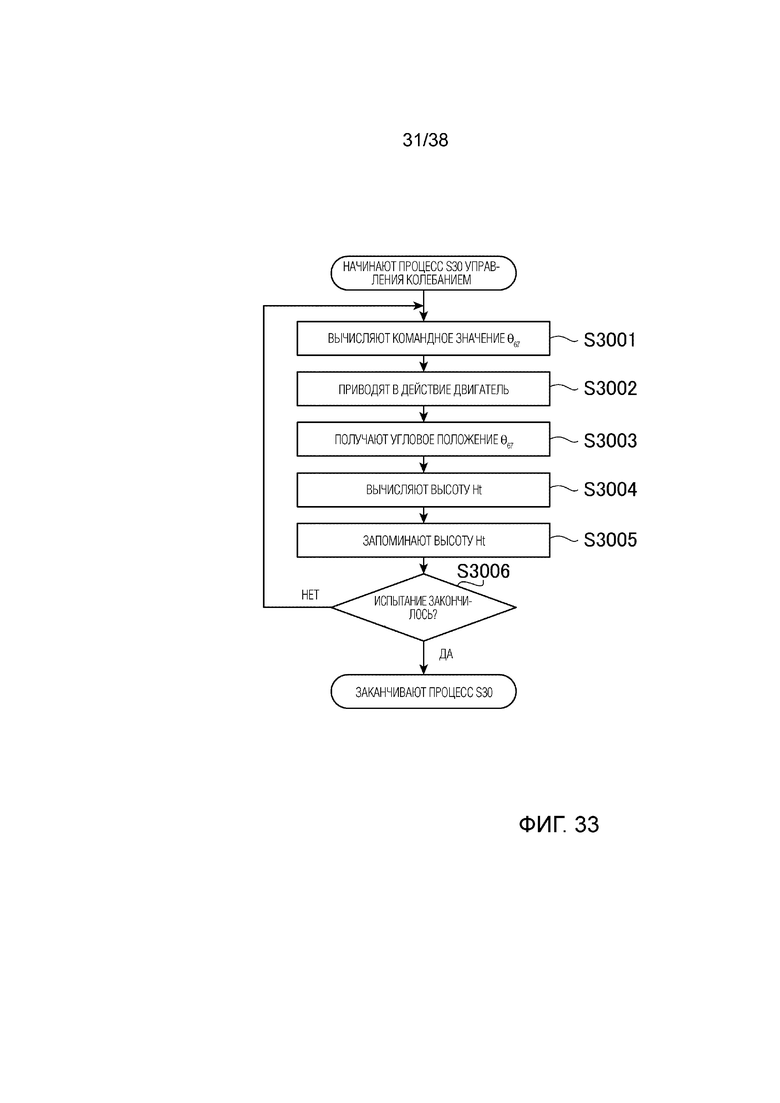
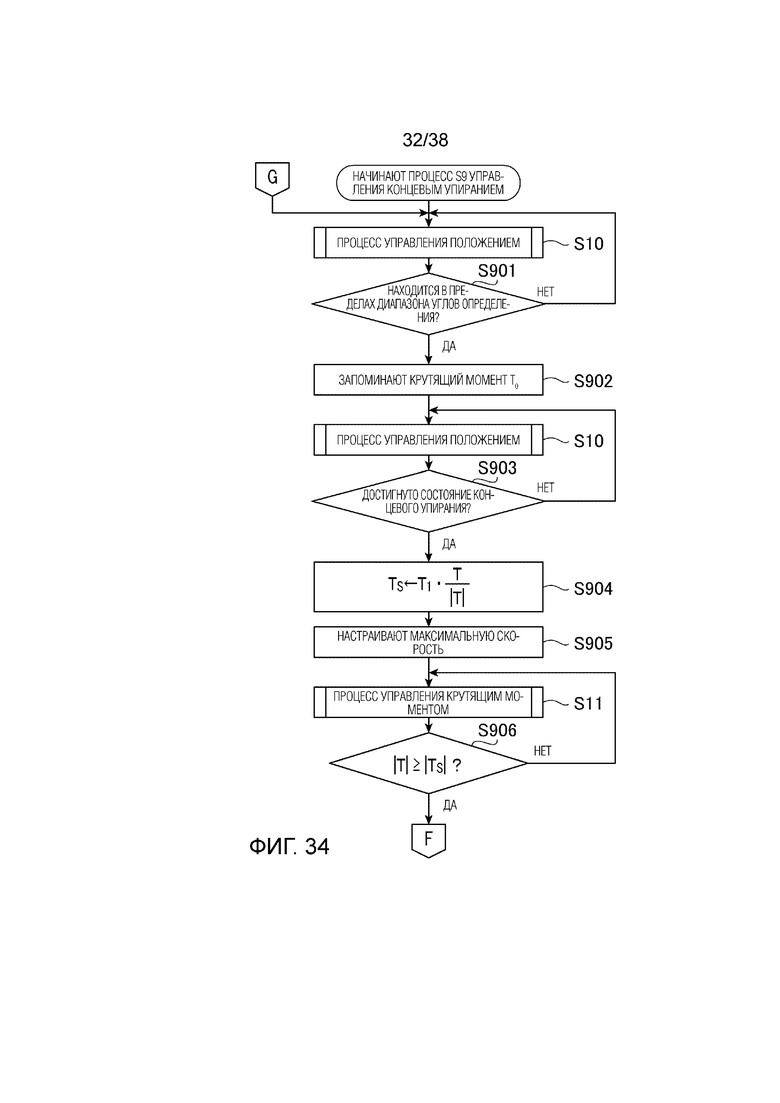
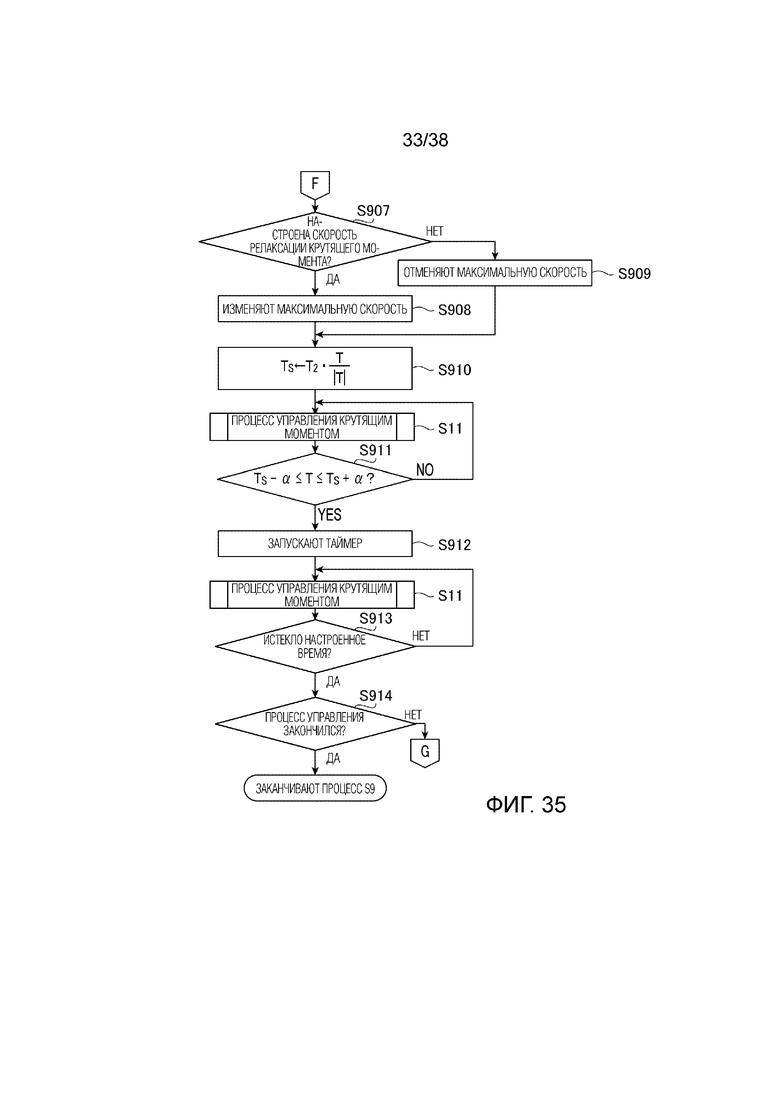
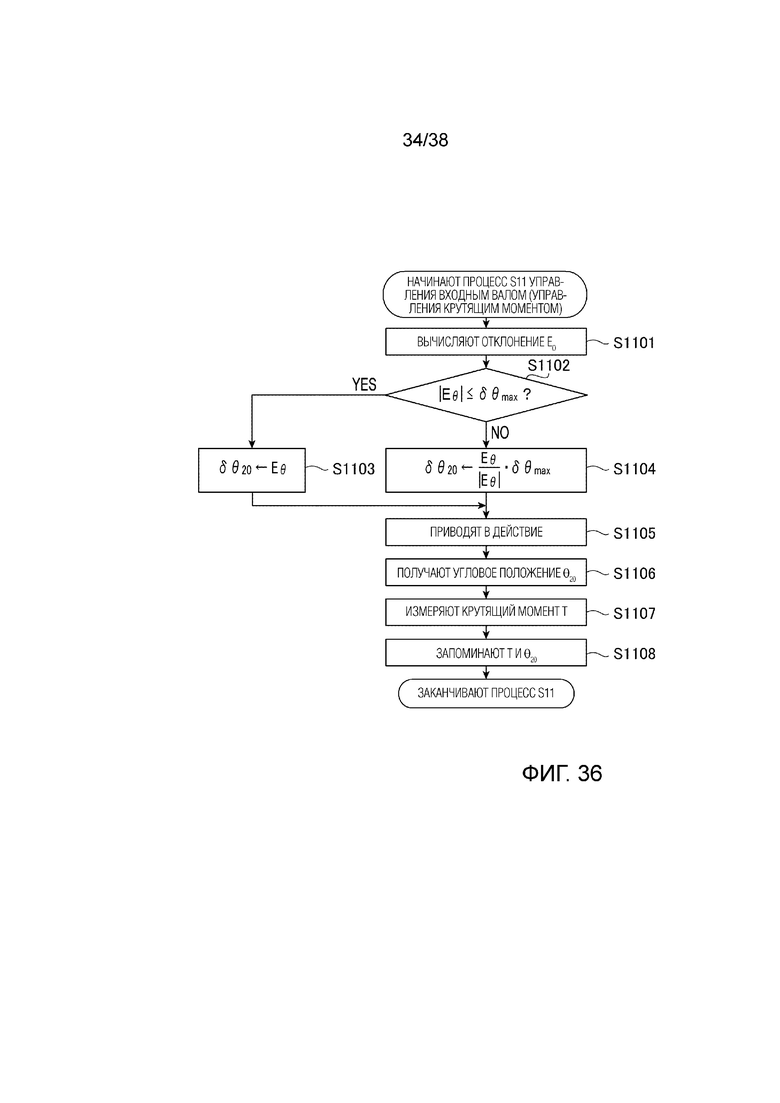
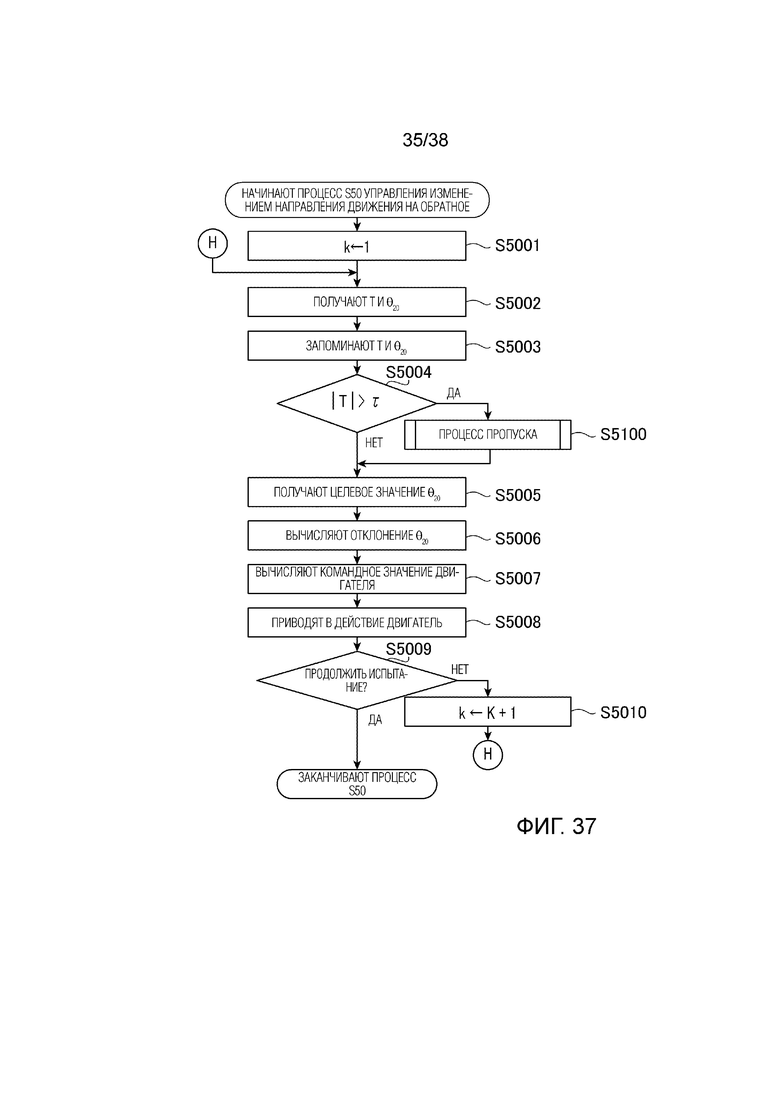
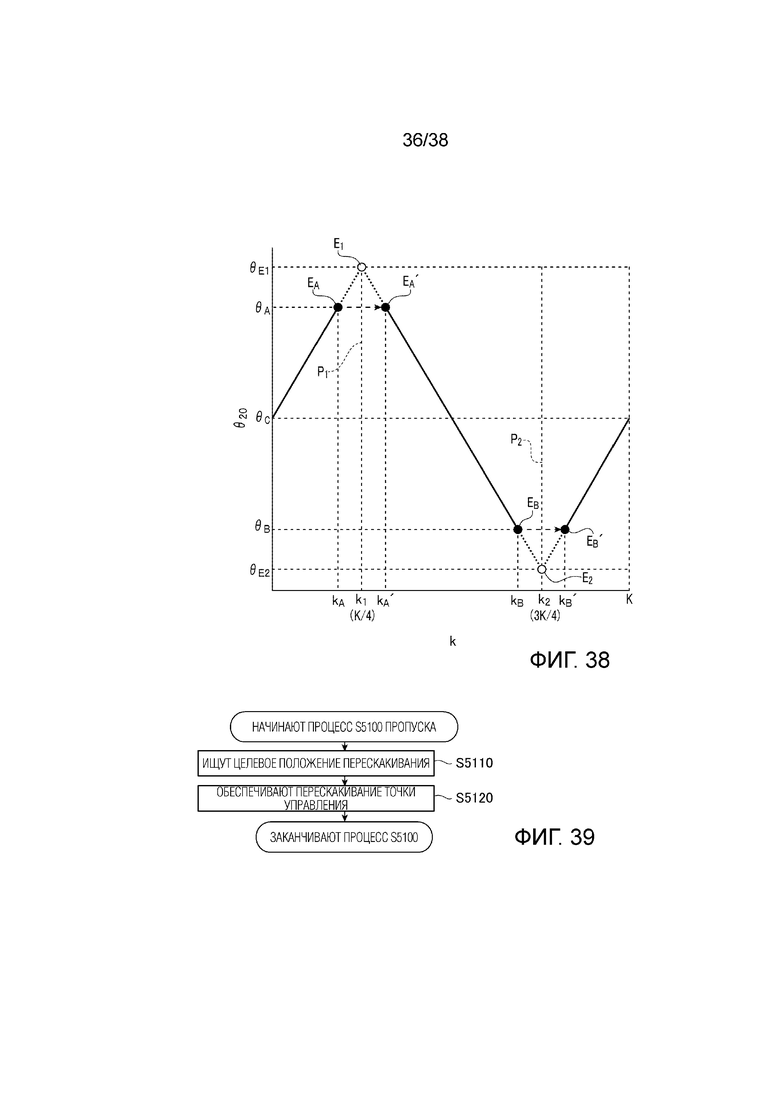
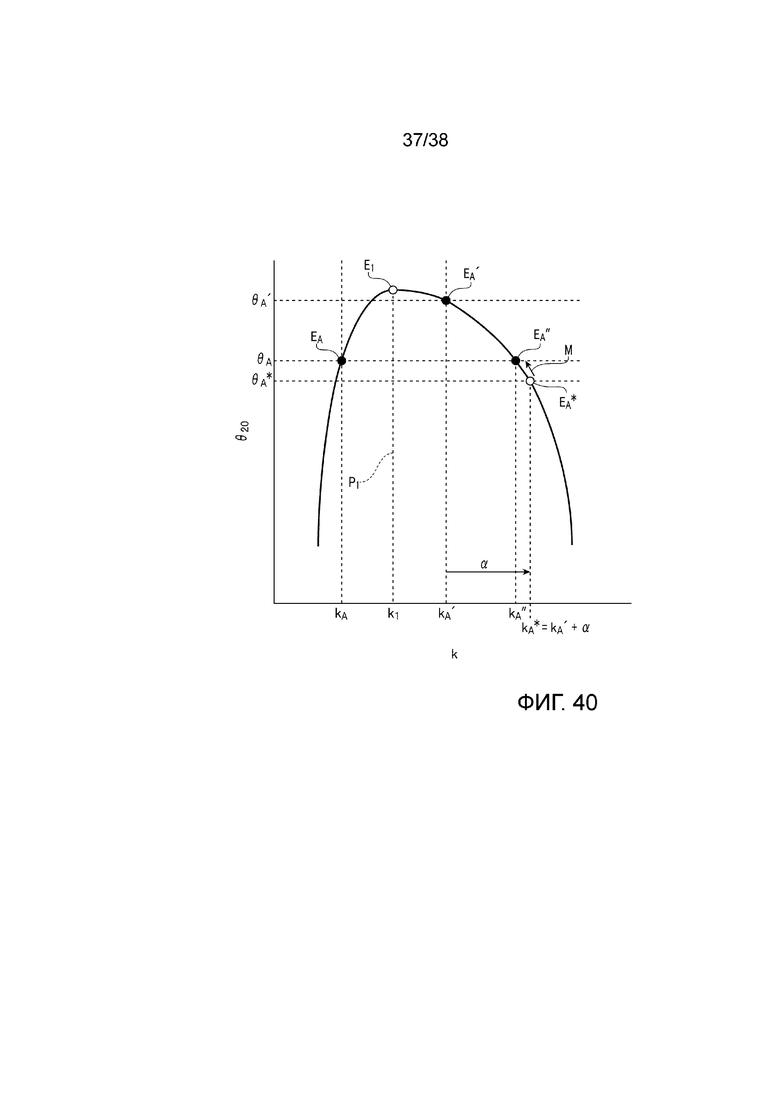
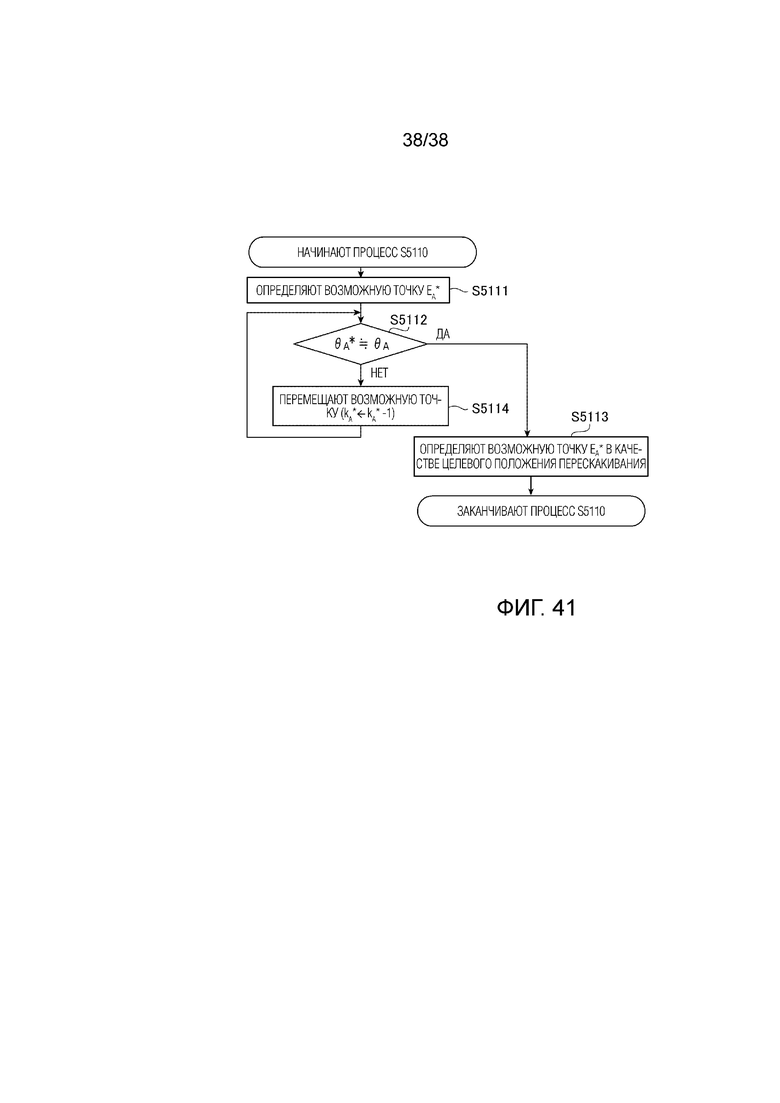
Изобретение относится к испытательному устройству, способу настройки испытательного процесса и способу испытания рулевого механизма. Согласно одному аспекту настоящего изобретения обеспечено испытательное устройство, включающее в себя приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма, обеспеченного в качестве образца, и управляющую часть, выполненную с возможностью управлять приводной частью входной стороны для приведения во вращательное движение вала рулевого механизма согласно заданной испытательной форме волны, причем управляющая часть выполнена с возможностью выполнять управление изменением направления движения на обратное, в котором сразу же изменяют направление вращения вала рулевого механизма на обратное, когда угловое положение вала рулевого механизма достигает положения концевого упирания, являющегося концом диапазона движения вала рулевого механизма, и причем управление изменением направления движения на обратное включает в себя процесс пропуска, в котором перескакивают в следующую точку управления, в которой, как ожидается, крутящий момент будет по существу равен крутящему моменту в то время, когда угловое положение вала рулевого механизма достигает положения концевого упирания. Технический результат заключается в возможности прикладывать нагрузку, более близкую к нагрузке, прикладываемой к рулевому механизму, установленному на реальное транспортное средство, и обеспечивать более подходящее оценивание образца. 18 з.п. ф-лы, 41 ил. 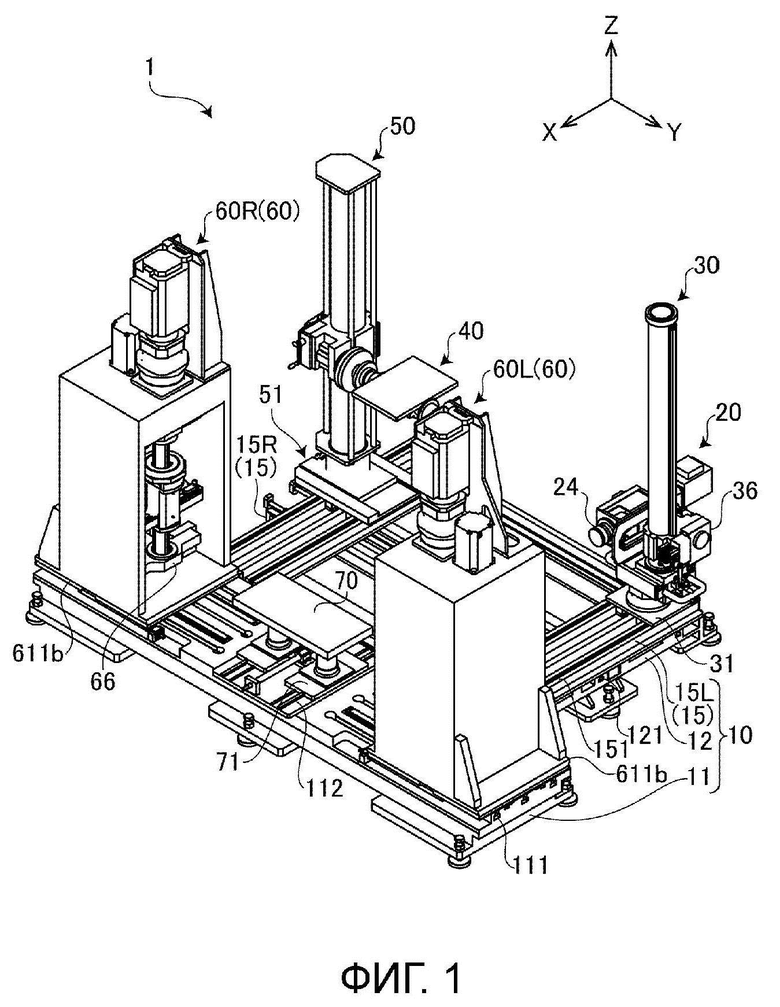
1. Испытательное устройство, содержащее:
приводную часть входной стороны, выполненную с возможностью приводить во вращательное движение вал рулевого механизма в качестве образца;
управляющую часть, выполненную с возможностью управлять приводной частью входной стороны; и
средство обнаружения положения, выполненное с возможностью обнаруживать угловое положение вала рулевого механизма,
причем управляющая часть выполнена с возможностью:
управлять приводной частью входной стороны для ограничения максимального значения крутящего момента вала рулевого механизма, когда угловое положение вала рулевого механизма достигает положения концевого упирания, являющегося концом диапазона движения вала рулевого механизма,
и управлять приведением в движение вала рулевого механизма посредством:
управления положением, в котором угловое положение вала рулевого механизма используется в качестве управляемой переменной; и
управления крутящим моментом, в котором крутящий момент вала рулевого механизма используется в качестве управляемой переменной,
причем управляющая часть:
выполняет управление положением, когда угловое положение вала рулевого механизма находится за пределами первого углового диапазона, включающего в себя положение концевого упирания, и
переключает приведение в движение вала рулевого механизма с управления положением на управление крутящим моментом, когда угловое положение вала рулевого механизма достигает пределов первого углового диапазона.
2. Испытательное устройство по п. 1,
в котором, при управлении крутящим моментом, вращение вала рулевого механизма управляется таким образом, чтобы угловая скорость вала рулевого механизма не превышала заданное максимальное значение.
3. Испытательное устройство по п. 1 или 2, в котором:
первый целевой крутящий момент настроен на целевое значение крутящего момента, когда приведение в движение вала рулевого механизма переключается с управления положением на управление крутящим моментом, и
приведение в движение вала рулевого механизма переключается с управления крутящим моментом на управление положением, когда истекает заданный интервал времени после достижения крутящим моментом первого целевого крутящего момента.
4. Испытательное устройство по п. 1 или 2, в котором:
первый целевой крутящий момент настроен на целевое значение крутящего момента, когда приведение в движение вала рулевого механизма переключается с управления положением на управление крутящим моментом,
целевое значение крутящего момента изменяется на второй целевой крутящий момент, отличный от первого целевого крутящего момента, когда крутящий момент достигает первого целевого крутящего момента, и
приведение в движение вала рулевого механизма переключается с управления крутящим моментом на управление положением, когда истекает заданный интервал времени после достижения крутящим моментом второго целевого крутящего момента.
5. Испытательное устройство по п. 1, содержащее:
приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма в качестве образца; и
средство обнаружения нагрузки, выполненное с возможностью обнаруживать нагрузку;
причем:
приводная часть выходной стороны включает в себя первый двигатель, выполненный с возможностью генерировать нагрузку,
управляющая часть включает в себя:
средство вычисления целевого значения, выполненное с возможностью вычислять целевое значение управляемой переменной первого двигателя на основе целевого значения нагрузки, и
часть генерирования обучающих данных, выполненную с возможностью генерировать обучающие данные на основе измеренного значения управляемой переменной первого двигателя, и
средство вычисления целевого значения вычисляет целевое значение управляемой переменной первого двигателя на основе обучающих данных при повторном приложении нагрузки, имеющей одну и ту же форму волны, к поперечной рулевой тяге,
причем средство вычисления целевого значения включает в себя:
средство вычисления отклонения, выполненное с возможностью вычислять отклонение нагрузки от целевого значения и измеренного значения нагрузки;
средство вычисления корректирующего значения, выполненное с возможностью вычислять корректирующее значение управляемой переменной первого двигателя на основании отклонения нагрузки; и
корректирующее средство, выполненное с возможностью выдавать значение, получаемое сложением корректирующего значения со значением из обучающих данных, в качестве целевого значения управляемой переменной первого двигателя.
6. Испытательное устройство по п. 5,
в котором, когда управляющая часть повторно выполняет цикл управления, состоящий из множества точек управления, обучающие данные получают усреднением измеренных значений управляемой переменной для множества последних циклов управления.
7. Испытательное устройство по п. 5 или 6,
в котором средство вычисления целевого значения вычисляет целевое значение управляемой переменной первого двигателя с использованием в качестве обучающих данных преобразованной управляемой переменной, получаемой преобразованием угловой скорости вала рулевого механизма образца в угловую скорость первого двигателя, когда число полученных измеренных значений управляемой переменной первого двигателя меньше заданного числа.
8. Испытательное устройство по п. 1,
в котором управляющая часть включает в себя:
средство приема настроенного значения крутящего момента, выполненное с возможностью принимать входные данные о максимальном значении крутящего момента, являющемся настроенным значением максимального значения допустимого диапазона крутящего момента, и первый индекс, представляющий настроенное значение крутящего момента, отличное от максимального значения крутящего момента; и
средство вычисления настроенного значения крутящего момента, выполненное с возможностью вычислять настроенное значение крутящего момента на основе максимального значения крутящего момента и первого индекса, принимаемых средством приема настроенного значения крутящего момента.
9. Испытательное устройство по п. 8, в котором:
первый индекс является отношением настроенного значения крутящего момента к максимальному значению крутящего момента, и
средство вычисления настроенного значения крутящего момента вычисляет значение, получаемое умножением максимального значения крутящего момента на первый индекс, в качестве настроенного значения крутящего момента.
10. Испытательное устройство по п. 8 или 9,
содержащее второй двигатель, выполненный с возможностью приводить в движение вал рулевого механизма,
причем управляющая часть включает в себя средство вычисления командного значения, выполненное с возможностью вычислять командное значение для второго двигателя на основе настроенного значения крутящего момента.
11. Испытательное устройство по п. 1,
в котором управляющая часть выполнена с возможностью выполнять процесс центрирования,
причем процесс центрирования включает в себя:
этап однонаправленного приведения в движение, на котором приводят во вращательное движение вал рулевого механизма в одном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения;
первый этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θА вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе однонаправленного приведения в движение;
этап приведения в движение в обратном направлении, на котором приводят во вращательное движение вал рулевого механизма в обратном направлении до тех пор, пока крутящий момент вала рулевого механизма не достигнет заданного значения;
второй этап обнаружения положения концевого упирания, на котором обнаруживают угловое положение θВ вала рулевого механизма, когда крутящий момент вала рулевого механизма достигает заданного значения на этапе приведения в движение в обратном направлении; и
этап вычисления центрального положения, на котором вычисляют центральное положение θС диапазона движения вала рулевого механизма посредством следующего уравнения (1)
 . (1)
. (1)
12. Испытательное устройство по п. 1, содержащее:
приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма в качестве образца; и
часть обнаружения нагрузки, выполненную с возможностью обнаруживать нагрузку,
причем:
приводная часть выходной стороны включает в себя подвижное основание, выполненное с возможностью приводиться во вращательное движение относительно оси вращения, ортогональной направлению движения поперечной рулевой тяги,
подвижное основание включает в себя пару рычагов, продолжающихся в направлении вперед-назад по существу ортогонально оси вращения и образованных симметрично относительно плоскости, включающей в себя ось вращения, и
поперечная рулевая тяга прикреплена к одному из пары рычагов.
13. Испытательное устройство по п. 12,
в котором управляющая часть выполнена с возможностью выполнять процесс проверки полярности,
причем процесс проверки полярности включает в себя:
этап приема входных данных, на котором принимают входные данные, указывающие на то, является ли образец по своему типу передним рулевым устройством или задним рулевым устройством;
первый этап обнаружения положения выходной стороны, на котором обнаруживают угловое положение подвижного основания;
этап приведения в движение, на котором приводят во вращательное движение вал рулевого механизма в заданном направлении вращения на заданный угол поворота;
второй этап обнаружения положения выходной стороны, на котором обнаруживают угловое положение подвижного основания после этапа приведения в движение;
этап определения направления вращения, на котором определяют направление вращения подвижного основания на этапе приведения в движение на основе результатов обнаружения первого этапа обнаружения положения выходной стороны и второго этапа обнаружения положения выходной стороны; и
этап определения полярности, на котором определяют, соответствует ли соотношение между направлением вращения вала рулевого механизма и направлением вращения подвижного основания типу образца.
14. Испытательное устройство по п. 13,
в котором процесс проверки полярности включает в себя:
этап уменьшения максимального значения крутящего момента, на котором уменьшают максимальное значение крутящего момента, являющееся настроенным значением максимального значения крутящего момента вала рулевого механизма перед этапом приведения в движение; и
этап восстановления максимального значения крутящего момента, на котором восстанавливают максимальное значение крутящего момента до начального значения после этапа приведения в движение.
15. Испытательное устройство по п. 12,
в котором управляющая часть выполнена с возможностью выполнять процесс обнаружения передаточного отношения скорости,
причем процесс обнаружения передаточного отношения скорости включает в себя:
этап приведения во вращательное движение во всем диапазоне, на котором приводят во вращательное движение вал рулевого механизма в пределах по существу всего диапазона движения вала рулевого механизма;
этап обнаружения положения выходной стороны во всем диапазоне, на котором обнаруживают, на этапе приведения во вращательное движение во всем диапазоне, угловые положения подвижного основания для множества угловых положений вала рулевого механизма с заданными интервалами в пределах по существу всего диапазона движения вала рулевого механизма; и
этап вычисления передаточного отношения скорости, на котором вычисляют передаточное отношение скорости, являющееся отношением угла поворота подвижного основания к углу поворота вала рулевого механизма в каждой секции диапазона движения вала рулевого механизма, разделенной на множество угловых положений, на основе результата обнаружения на этапе обнаружения положения выходной стороны во всем диапазоне.
16. Испытательное устройство по п. 15, выполненное с возможностью:
прерывисто приводить в движение вал рулевого механизма с заданным интервалом на этапе приведения во вращательное движение во всем диапазоне, и
обнаруживать угловое положение подвижного основания каждый раз, когда вал рулевого механизма приводится во вращательное движение с заданным интервалом на этапе обнаружения положения выходной стороны во всем диапазоне.
17. Испытательное устройство по п. 16,
включающее в себя этап приведения в соответствие, на котором определяют формулу вычисления, представляющую соотношение между угловым положением вала рулевого механизма и передаточным отношением скорости, на основе значения передаточного отношения скорости в каждой из секций, вычисленного на этапе вычисления передаточного отношения скорости.
18. Испытательное устройство по п. 1, содержащее:
приводную часть выходной стороны, выполненную с возможностью прикладывать нагрузку в виде осевой силы к поперечной рулевой тяге рулевого механизма в качестве образца; и
часть обнаружения нагрузки, выполненную с возможностью обнаруживать нагрузку,
в котором управляющая часть включает в себя:
средство приема настроенного значения нагрузки, выполненное с возможностью принимать максимальное значение нагрузки, являющееся настроенным значением максимального значения допустимого диапазона нагрузки, и второй индекс, указывающий на настроенное значение нагрузки, отличное от максимального значения нагрузки; и
средство вычисления настроенного значения нагрузки, выполненное с возможностью вычислять настроенное значение нагрузки на основе максимального значения нагрузки и второго индекса, принимаемого средством приема настроенного значения нагрузки.
19. Испытательное устройство по п. 18, в котором:
приводная часть выходной стороны включает в себя первый двигатель, выполненный с возможностью генерировать нагрузку,
второй индекс является отношением настроенного значения нагрузки к максимальному значению нагрузки,
средство вычисления настроенного значения нагрузки выдает значение, получаемое умножением максимального значения нагрузки на второй индекс, в качестве настроенного значения нагрузки, и
управляющая часть включает в себя средство вычисления целевого значения, выполненное с возможностью вычислять целевое значение управляемой переменной первого двигателя на основе настроенного значения нагрузки.
| JP 5483592 B2, 07.05.2014 | |||
| CN 205138806 U, 06.04.2016 | |||
| US 2011125450 A1, 26.05.2011 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2014 |
|
RU2627262C2 |
| Приспособление для кидки челнока в ткацких станках | 1926 |
|
SU5182A1 |

