Область техники
Настоящее изобретение относится к устройству для испытаний шин.
Уровень техники
Известно испытательное транспортное средство (упоминаемое в дальнейшем как «устройство для ходовых испытаний шин»), способное выполнять ходовые испытания шины для проверки различных эксплуатационных характеристик автомобильной шины посредством движения на поверхности реальной дороги, такой как трасса для испытаний автомобилей, и предусмотренное с испытываемой шиной, установленной на нем.
Устройство для ходовых испытаний шин, описанное в публикации заявки на патент Японии № 2016-80414 (патентном документе 1), представляет собой транспортное средство, полученное посредством модификации автобуса и снабженное испытательным оборудованием. При ходовом испытании шины необходимо обеспечить приложение большого крутящего момента (движущей силы, тормозной силы), который(-ая) быстро передается испытательному колесу при вращении испытательного колеса, на котором установлена испытываемая шина, с высокой скоростью. Для выполнения такого управляющего воздействия с помощью широко используемого электродвигателя требуется электродвигатель, имеющий большую мощность, но затруднена установка такого большого электродвигателя в транспортном средстве. Вследствие этого устройство для ходовых испытаний шин, раскрытое в патентном документе 1, выполнено с возможностью приведения в движение и торможения испытательного колеса посредством использования гидравлического двигателя.
Сущность изобретения
В транспортном средстве как устройстве для ходовых испытаний шин по патентному документу 1 установлено устройство для подачи гидравлического давления, предназначенное для подачи гидравлического давления в гидравлический двигатель. Следовательно, большое пространство в транспортном средстве занято устройством для подачи гидравлического давления, и невозможно гарантировать в достаточной степени пространство для установки испытательного оборудования и рабочее место для оператора для работы в транспортном средстве.
Кроме того, если происходит утечка рабочей жидкости для гидравлических систем из гидравлической системы, испытываемая шина и поверхность дороги могут быть загрязнены рабочей жидкостью для гидравлических систем, что может вызвать снижение точности испытания.
Настоящее изобретение было создано с учетом вышеуказанных обстоятельств, и задача настоящего изобретения состоит в обеспечении возможности ходового испытания шины без использования гидравлической системы.
Согласно варианту осуществления настоящего изобретения предложено устройство для испытаний шин, включающее в себя транспортное средство и испытательный агрегат, предусмотренный в транспортном средстве и выполненный с возможностью обеспечения опоры для испытательного колеса, на котором установлена испытываемая шина, в состоянии, в котором испытательное колесо находится в контакте с поверхностью дороги, при этом испытательный агрегат включает в себя силовой агрегат, выполненный с возможностью выработки мощности для приведения испытательного колеса во вращательное движение, и силовой агрегат включает в себя модуль обеспечения вращательного движения, выполненный с возможностью обеспечения вращательного движения с частотой вращения, которая соответствует скорости движения транспортного средства, и модуль приложения крутящего момента, выполненный с возможностью добавления крутящего момента к вращательному движению для выдачи крутящего момента.
В устройстве для испытаний шин, описанном выше, модуль обеспечения вращательного движения может включать в себя ведомое колесо, выполненное с возможностью контактирования с поверхностью дороги, первую ось, соединенную с ведомым колесом, и первый передаточный механизм, выполненный с возможностью соединения первой оси с входным валом модуля приложения крутящего момента. В этом случае модуль обеспечения вращательного движения может включать в себя первый подшипник, выполненный с возможностью обеспечения опоры для первой оси с возможностью вращения.
В устройстве для испытаний шин, описанном выше, первый передаточный механизм может включать в себя первый ведущий шкив, соединенный с первой осью, первый ведомый шкив, соединенный с входным валом модуля приложения крутящего момента, и первый зубчатый ремень, натянутый между первым ведущим шкивом и первым ведомым шкивом.
В устройстве для испытаний шин, описанном выше, модуль приложения крутящего момента может включать в себя вращающуюся раму, опертую с возможностью вращения, первый электродвигатель, присоединенный к вращающейся раме, и первый вал, расположенный коаксиально по отношению к вращающейся раме и соединенный с валом первого электродвигателя, при этом вращающаяся рама приводится во вращательное движение посредством модуля обеспечения вращательного движения.
В устройстве для испытаний шин, описанном выше, первый ведомый шкив может быть соединен с вращающейся рамой.
Устройство для испытаний шин, описанное выше, может дополнительно включать в себя два вторых подшипника, выполненных с возможностью обеспечения опоры для вращающейся рамы с возможностью вращения, при этом вращающаяся рама является цилиндрической и включает в себя часть для размещения электродвигателя, выполненную с возможностью размещения первого электродвигателя, и две части в виде валов, которые расположены с обеих сторон части для размещения электродвигателя, определяемых в аксиальном направлении, и имеют меньший диаметр, чем часть для размещения электродвигателя, при этом вращающаяся рама опирается с возможностью вращения на два вторых подшипника в зоне данных двух частей в виде валов.
В устройстве для испытаний шин, описанном выше, испытательный агрегат может включать в себя узел с осью, выполненный с возможностью обеспечения опоры для испытательного колеса с возможностью вращения, и устройство для выставления, выполненное с возможностью регулирования ориентации испытательного колеса и нагрузки, действующей на испытательное колесо.
В устройстве для испытаний шин, описанном выше, устройство для выставления может включать в себя механизм регулирования нагрузки, выполненный с возможностью регулирования нагрузки, действующей на испытательное колесо, и механизм регулирования нагрузки может включать в себя первую подвижную раму, выполненную с возможностью вертикального перемещения, устройство для направления прямолинейного перемещения, выполненное с возможностью направления вертикального перемещения первой подвижной рамы, и первый приводной блок, выполненный с возможностью приведения первой подвижной рамы в движение в вертикальном направлении.
В устройстве для испытаний шин, описанном выше, испытательный агрегат может включать в себя базовую раму, прикрепленную к раме транспортного средства, устройство для направления прямолинейного перемещения может включать в себя направляющую, присоединенную к одной из базовой рамы и первой подвижной рамы, и каретку, присоединенную к другой из базовой рамы и первой подвижной рамы и выполненную с возможностью перемещения по направляющей, первый приводной блок может включать в себя преобразователь движения и второй электродвигатель, выполненный с возможностью приведения в действие преобразователя движения, при этом преобразователь движения может включать в себя основную часть, присоединенную к базовой раме, и подвижную часть, выполненную с возможностью вертикального перемещения относительно основной части, и первая подвижная рама может быть прикреплена к данной подвижной части.
В устройстве для испытаний шин, описанном выше, устройство для выставления может включать в себя механизм регулирования угла развала колеса, выполненный с возможностью регулирования угла развала испытательного колеса, при этом механизм регулирования угла развала колеса включает в себя вторую подвижную раму, выполненную с возможностью поворота вокруг оси Еφ, параллельной направлению движения транспортного средства, первую ось поворота, выступающую от второй подвижной рамы коаксиально по отношению к оси Еφ, третий подшипник, выполненный с возможностью обеспечения опоры для первой оси поворота с возможностью поворота, и приводной блок для регулирования угла φ развала колеса, выполненный с возможностью приведения второй подвижной рамы во вращательное движение.
Устройство для испытаний шин, описанное выше, может дополнительно включать в себя устройство для направления криволинейного перемещения, выполненное с возможностью направления поворота второй подвижной рамы.
В устройстве для испытаний шин, описанном выше, устройство для выставления может включать в себя механизм регулирования угла увода, выполненный с возможностью регулирования угла увода испытательного колеса, при этом механизм регулирования угла увода включает в себя третью подвижную раму, выполненную с возможностью поворота вокруг оси ЕƟ, ортогональной к каждой из оси Еλ, представляющей собой ось вращения испытательного колеса, и оси Еφ, вторую ось поворота, выступающую от третьей подвижной рамы коаксиально по отношению к оси ЕƟ, четвертый подшипник, выполненный с возможностью обеспечения опоры для второй оси поворота с возможностью поворота, и приводной блок для регулирования угла Ɵ увода, выполненный с возможностью приведения третьей подвижной рамы во вращательное движение.
Узел с осью может включать в себя ось вращения, пятый подшипник, выполненный с возможностью обеспечения опоры для оси вращения с возможностью вращения, и ступицу колеса, которая коаксиально присоединена к дальнему концу оси вращения и к которой должно быть присоединено испытательное колесо.
В устройстве для испытаний шин, описанном выше, узел с осью может включать в себя тормозное устройство, выполненное с возможностью торможения вращения оси вращения.
Устройство для испытаний шин, описанное выше, может дополнительно включать в себя модуль передачи мощности, выполненный с возможностью передачи выходной мощности от силового агрегата к оси вращения, при этом модуль передачи мощности включает в себя подвижный шарнир равных угловых скоростей, имеющий один конец, присоединенный к оси вращения.
В устройстве для испытаний шин, описанном выше, модуль приложения крутящего момента может включать в себя редуктор числа оборотов, выполненный с возможностью уменьшения числа оборотов на выходе первого электродвигателя, и первый вал может быть соединен с валом первого электродвигателя посредством редуктора числа оборотов.
В устройстве для испытаний шин, описанном выше, момент инерции ротора первого электродвигателя может составлять 0,01 кг∙м2 или менее.
В устройстве для испытаний шин, описанном выше, номинальная выходная мощность первого электродвигателя может составлять от 7 кВт до 37 кВт.
В устройстве для испытаний шин, описанном выше, приводной блок для регулирования угла φ развала колеса может включать в себя первое зубчатое колесо, расположенное коаксиально по отношению к оси Еφ, первую шестерню, входящую в зацепление с первым зубчатым колесом, и третий электродвигатель, выполненный с возможностью приведения первой шестерни во вращательное движение.
В устройстве для испытаний шин, описанном выше, первое зубчатое колесо может быть присоединено к одной из первой подвижной рамы и второй подвижной рамы, и третий электродвигатель может быть присоединен к другой из первой подвижной рамы и второй подвижной рамы.
В устройстве для испытаний шин, описанном выше, устройство для направления криволинейного перемещения может включать в себя дугообразную криволинейную направляющую, расположенную концентрически по отношению к оси Еφ и присоединенную к одной из первой подвижной рамы и второй подвижной рамы, и каретку, присоединенную к другой из первой подвижной рамы и второй подвижной рамы и выполненную с возможностью перемещения по криволинейной направляющей.
В устройстве для испытаний шин, описанном выше, приводной блок для регулирования угла Ɵ увода может включать в себя второе зубчатое колесо, расположенное коаксиально по отношению к оси ЕƟ, вторую шестерню, входящую в зацепление со вторым зубчатым колесом, и четвертый электродвигатель, выполненный с возможностью приведения второй шестерни во вращательное движение.
В устройстве для испытаний шин, описанном выше, второе зубчатое колесо может быть присоединено к одной из второй подвижной рамы и третьей подвижной рамы, четвертый электродвигатель может быть присоединен к другой из второй подвижной рамы и третьей подвижной рамы, и четвертый подшипник может быть присоединен ко второй подвижной раме.
В устройстве для испытаний шин, описанном выше, узел с осью может включать в себя корпус, к которому присоединен пятый подшипник, и множество пьезоэлектрических элементов, расположенных вокруг оси вращения, и пьезоэлектрические элементы могут быть расположены между пятым подшипником и корпусом и прикреплены посредством болтов, предназначенных для присоединения пятого подшипника к корпусу.
В устройстве для испытаний шин, описанном выше, модуль передачи мощности может включать в себя второй вал, присоединенный к силовому агрегату, шестой подшипник, выполненный с возможностью обеспечения опоры для второго вала с возможностью вращения, третий вал, присоединенный к подвижному шарниру равных угловых скоростей, седьмой подшипник, выполненный с возможностью обеспечения опоры для третьего вала с возможностью вращения, и датчик крутящего момента, выполненный с возможностью определения крутящего момента, передаваемого модулем передачи мощности, и второй вал может быть соединен с третьим валом посредством датчика крутящего момента.
В устройстве для испытаний шин, описанном выше, модуль приложения крутящего момента может включать в себя второй передаточный механизм, выполненный с возможностью соединения первого вала с входным валом модуля передачи мощности, при этом второй передаточный механизм включает в себя второй ведущий шкив, соединенный с первым валом, второй ведомый шкив, соединенный с осью вращения, и второй зубчатый ремень, натянутый между вторым ведущим шкивом и вторым ведомым шкивом.
В устройстве для испытаний шин, описанном выше, второй зубчатый ремень может иметь корды из стальных проволок или углеродных волокон.
Согласно варианту осуществления настоящего изобретения предложено устройство для ходовых испытаний шин, выполненное с возможностью приведения в движение испытательного колеса без использования гидравлической системы.
Краткое описание чертежей
Фиг.1 - вид с правой стороны устройства для ходовых испытаний шин согласно варианту осуществления настоящего изобретения;
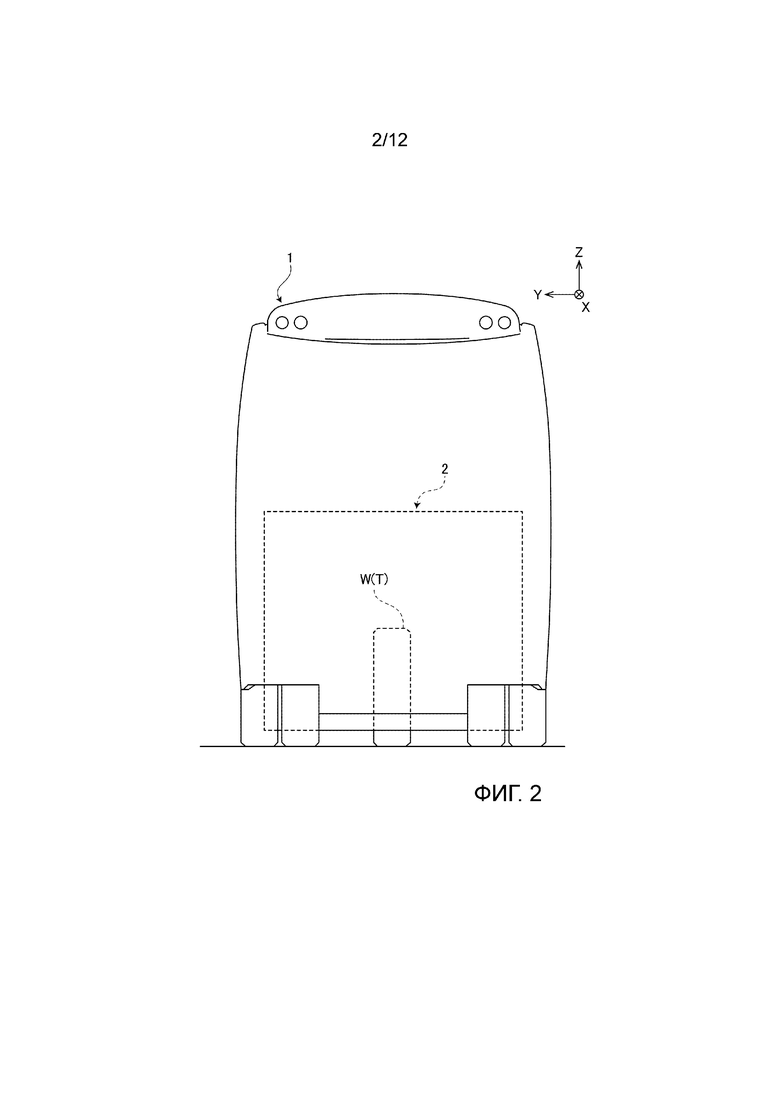
Фиг.2 - вид сзади устройства для ходовых испытаний шин согласно варианту осуществления настоящего изобретения;
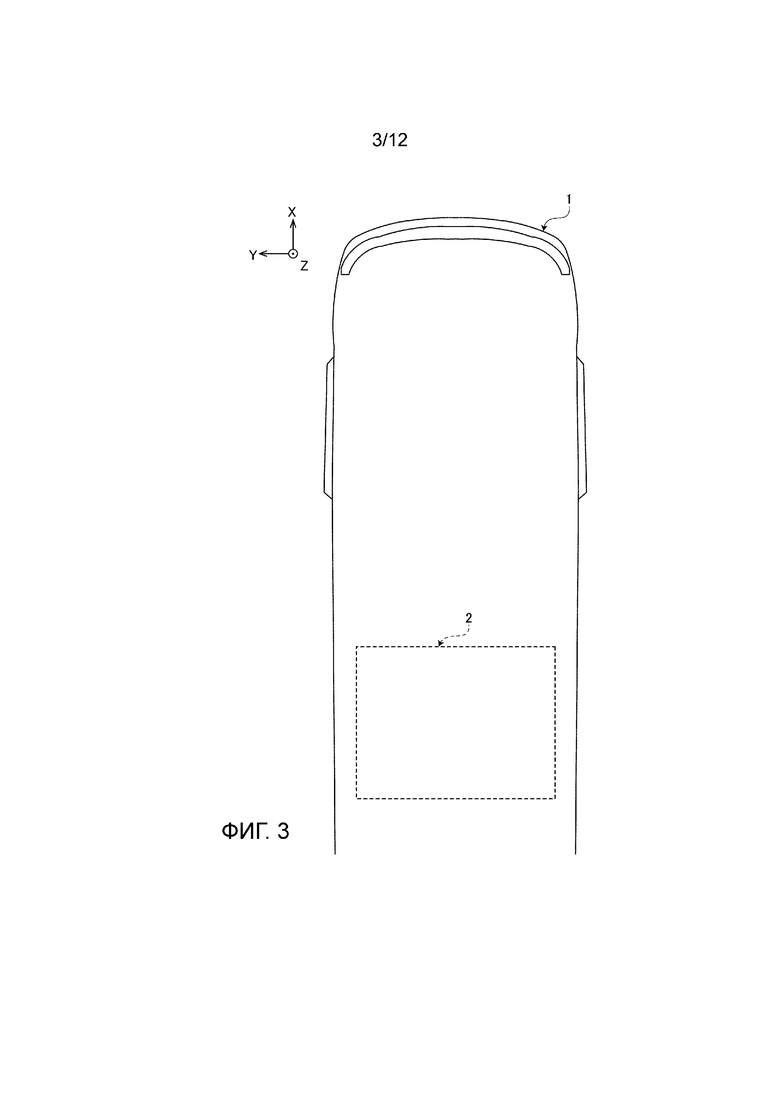
Фиг.3 - вид в плане передней части устройства для ходовых испытаний шин согласно варианту осуществления настоящего изобретения;
Фиг.4 - вид в плане испытательного агрегата;
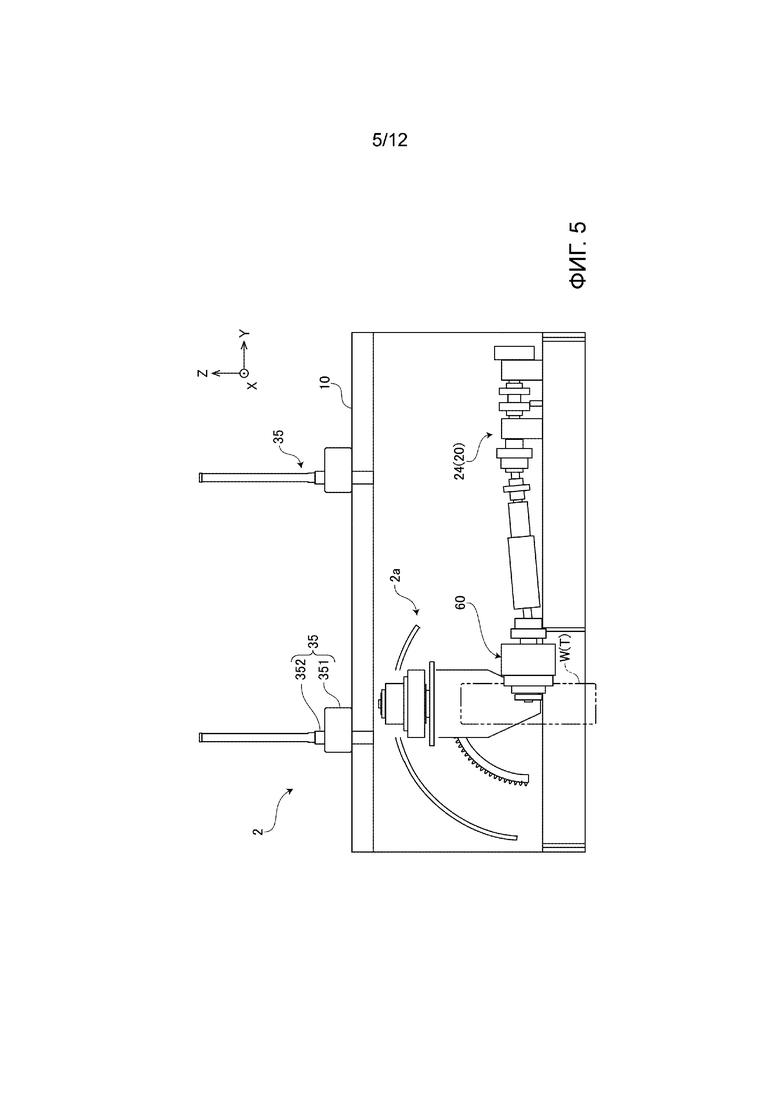
Фиг.5 - вид спереди испытательного агрегата;
Фиг.6 - схематическое изображение, иллюстрирующее схематическую конструкцию воспринимающего модуля и модуля приложения крутящего момента;
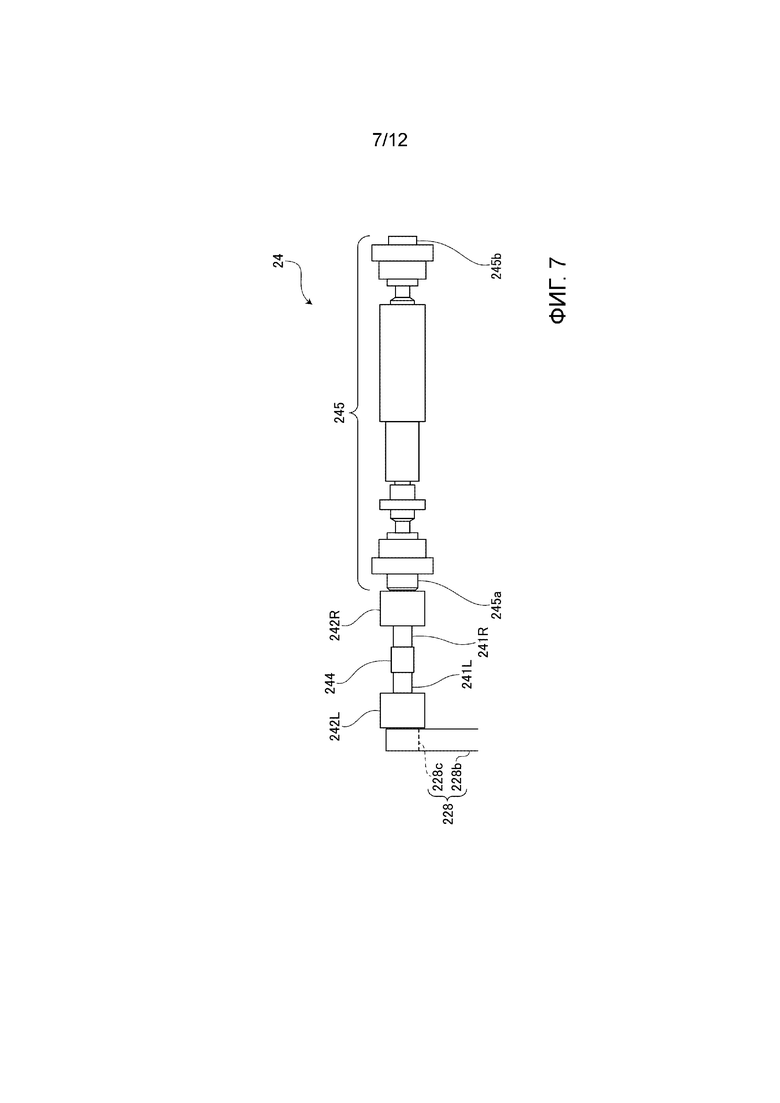
Фиг.7 - схематическое изображение, иллюстрирующее схематическую конструкцию модуля передачи мощности;
Фиг.8 - схематическое изображение, иллюстрирующее схематическую конструкцию устройства для выставления;
Фиг.9 - схематическое изображение, иллюстрирующее схематическую конструкцию устройства для выставления;
Фиг.10 - схематическое изображение, иллюстрирующее схематическую конструкцию устройства для выставления;
Фиг.11 - вид по стрелке, выполненный вдоль линии D-D с фиг.9; и
Фиг.12 - блок-схема системы управления.
Варианты осуществления изобретения
В дальнейшем вариант осуществления настоящего изобретения будет описан со ссылкой на чертежи. В нижеприведенном описании одни и те же или соответствующие компоненты обозначены одинаковыми или соответствующими ссылочными позициями, и дублирующее описание их будет опущено. На каждом чертеже для удобства описания некоторые компоненты исключены или показаны в сечении. На каждом чертеже в случае, когда показано множество элементов, имеющих одну и ту же ссылочную позицию, ссылочная позиция необязательно указана для всего множества элементов, и присвоение ссылочной позиции некоторым из множества элементов соответствующим образом исключено.
Устройство для ходовых испытаний шин согласно варианту осуществления настоящего изобретения, описанное ниже, представляет собой самоходное устройство для испытаний шин, полученное посредством модификации пассажирского автомобиля большого размера (в дальнейшем упоминаемого как «транспортное средство типа автобуса»). Устройство для ходовых испытаний шин представляет собой устройство, выполненное с возможностью проверки различных эксплуатационных характеристик испытываемой шины Т на поверхности дороги в разных состояниях при движении по поверхности дороги, такой как трасса для испытаний автомобилей, в состоянии, когда обеспечивается контакт испытательного колеса W (фиг.1), на котором установлена испытываемая шина Т, с поверхностью дороги.
Устройство для ходовых испытаний шин представляет собой устройство, в котором испытательный агрегат 2 и соответствующее ему вспомогательное устройство установлены на транспортном средстве 1, полученном посредством модификации транспортного средства типа автобуса с двигателем задней установки и приводом на задние колеса (в дальнейшем упоминаемого как “RR”), которое представляет собой базовое транспортное средство. Поскольку транспортное средство типа автобуса “RR” (или автобуса с двигателем передней установки и приводом на передние колеса (в дальнейшем упоминаемого как “FF”)) не имеет ведущего вала, расположенного в центральной части транспортного средства, существует преимущество, заключающееся в том, что степень свободы при размещении испытательного агрегата 2 является высокой.
Фиг.1, 2 и 3 представляют собой соответственно вид сбоку, вид сзади и вид в плане, показывающие расположение испытательного агрегата 2 в устройстве для ходовых испытаний шин. На фиг.3 задняя часть транспортного средства 1 не показана.
В нижеследующем описании направления вперед, назад, вверх, вниз, влево и вправо определены как направления, рассматриваемые, если смотреть в направлении движения транспортного средства 1 (то есть в положении сидя на непоказанном сиденье водителя). Передняя сторона определена как положительное направление оси Х, задняя сторона определена как отрицательное направление оси Х, левая сторона определена как положительное направление оси Y, правая сторона определена как отрицательное направление оси Y, верхняя сторона определена как положительное направление оси Z, и нижняя сторона определена как отрицательное направление оси Z.
Фиг.4 и 5 представляют собой соответственно вид в плане и вид спереди испытательного агрегата 2. Испытательный агрегат 2 включает в себя базовую раму 10, прикрепленную к (непоказанной) раме транспортного средства 1, устройство 2а для выставления, удерживаемое посредством базовой рамы 10, узел 60 с осью, опирающийся на устройство 2а для выставления, и силовой агрегат 20, выполненный с возможностью приведения в движение оси испытательного колеса W (оси 61 вращения, проиллюстрированной на фиг.10).
Часть силового агрегата 20 (воспринимающий модуль 21, который будет описан позднее) установлена на базовой раме 10, и остальная часть (модуль 22 приложения крутящего момента и модуль 24 передачи мощности, которые будут описаны позднее) установлена на подъемной раме 31 устройства 2а для выставления, которая будет описана позднее.
Узел 60 с осью (фиг.5) представляет собой узел, выполненный с возможностью обеспечения опоры для испытательного колеса W с возможностью вращения, и включает в себя ось 61 вращения (фиг.10), представляющую собой ось, которая вращается как одно целое с испытательным колесом W. Узел 60 с осью опирается на устройство 2а для выставления, так что высота и ориентация данного узла могут быть изменены.
Устройство 2а для выставления представляет собой устройство, выполненное с возможностью регулирования нагрузки (нагрузки при испытании), приложенной к испытательному колесу W, и ориентации (угла увода и угла развала) испытательного колеса W.
Силовой агрегат 20 представляет собой агрегат, выполненный с возможностью подачи энергии к испытательному колесу W, и его выходной вал соединен с осью 61 вращения.
Как показано на фиг.4, силовой агрегат 20 включает в себя воспринимающий модуль 21, модуль 22 приложения крутящего момента и модуль 24 передачи мощности. Воспринимающий модуль 21 (модуль обеспечения вращательного движения) включает в себя воспринимающее колесо 211 (ведомое колесо), которое входит в контакт с поверхностью дороги, и данному модулю 21 сообщается вращательное движение с частотой вращения, которая соответствует скорости движения транспортного средства 1, от поверхности дороги, и данный модуль 21 на выходе передает воспринятое/сообщенное вращательное движение. Модуль 22 приложения крутящего момента генерирует тормозную силу и движущую силу (в дальнейшем упоминаемые как «тормозная/движущая сила»), подлежащие приложению к испытательному колесу W, и обеспечивает добавление тормозной/движущей силы (то есть крутящего момента) к вращательному движению, передаваемому от воспринимающего модуля 21, для выдачи тормозной/движущей силы. Модуль 22 приложения крутящего момента обеспечивает возможность приложения крутящего момента к испытательному колесу W посредством изменения фазы вращательного движения, воспринятого воспринимающим модулем 21 (то есть модуль 22 приложения крутящего момента обеспечивает возможность приложения движущей силы или тормозной силы между поверхностью дороги и испытательным колесом W). Выходная мощность от модуля 22 приложения крутящего момента передается испытательному колесу W посредством модуля 24 передачи мощности и оси 61 вращения. Энергия, полученная от поверхности дороги воспринимающим модулем 21, передается поверхности дороги посредством испытательного колеса W. То есть силовой агрегат 20 образует систему циркуляции энергии вместе с испытательным колесом W и поверхностью дороги.
Фиг.6 представляет собой схематическое изображение, иллюстрирующее схематическую конструкцию воспринимающего модуля 21 и модуля 22 приложения крутящего момента. Воспринимающий модуль 21 включает в себя подшипник 214, ось 212, опирающуюся на подшипник 214 с возможностью вращения, ступицу 213 колеса, коаксиально присоединенную к одному концу оси 212, воспринимающее колесо 211, присоединенное к ступице 213 колеса, и первый ременный передаточный механизм 216 (первый передаточный механизм), выполненный с возможностью передачи вращения оси 212 модулю 22 приложения крутящего момента.
Первый ременный передаточный механизм 216 включает в себя ведущий шкив 216а, присоединенный к другому концу оси 212, ведомый шкив 216с, присоединенный к корпусу 220 модуля 22 приложения крутящего момента, при этом данный корпус будет описан позднее, и зубчатый ремень 216b, натянутый между ведущим шкивом 216а и ведомым шкивом 216с.
Воспринимающее колесо 211 представляет собой ведомое колесо, которое контактирует с поверхностью дороги, приводится в движение посредством поверхности дороги при движении транспортного средства 1 и вращается с окружной скоростью, которая такая же, как скорость движения транспортного средства 1. Вращение воспринимающего колеса 211 передается модулю 22 приложения крутящего момента посредством ступицы 213 колеса, оси 212 и первого ременного передаточного механизма 216.
Модуль 22 приложения крутящего момента включает в себя подшипники 224А и 224В, цилиндрический корпус 220 (вращающуюся раму), опирающуюся на подшипники 224А и 224В с возможностью вращения, электродвигатель 221, редуктор 222 числа оборотов и вал 223, присоединенный к корпусу 220, и второй ременный передаточный механизм 228 (второй передаточный механизм), выполненный с возможностью передачи вращения вала 223 модулю 24 передачи мощности. Если электродвигатель 221 выполнен с возможностью генерирования крутящего момента, подлежащего передаче испытательному колесу W, вал 223 может быть соединен непосредственно с валом 221s электродвигателя 221 без выполнения редуктора 222 числа оборотов. В этом случае вал 221s электродвигателя 221 и вал 223 могут быть образованы как одно целое.
Корпус 220 включает в себя по существу цилиндрическую первую основную часть 220а (часть для размещения электродвигателя) и вторую основную часть 220с, и по существу цилиндрические части 220d и 220е в виде валов, которые имеют меньший диаметр, чем первая основная часть 220а. Часть 220d в виде вала присоединена к правому концу первой основной части 220а коаксиально (то есть так, что первая основная часть 220а и часть 220d в виде вала имеют общую осевую линию), и часть 220е в виде вала коаксиально присоединена к левому концу первой основной части 220а посредством второй основной части 220с. Правая часть 220d в виде вала опирается с возможностью вращения на подшипник 224А, и левая часть 220е в виде вала опирается с возможностью вращения на подшипник 224В.
Ведомый шкив 216е первого ременного передаточного механизма 216 присоединен к дальнему концу левой части 220е в виде вала. Корпус 220 приводится во вращательное движение посредством воспринимающего модуля 21. То есть корпус 220 приводится во вращательное движение с частотой вращения, которая пропорциональна скорости движения транспортного средства 1, за счет энергии, получаемой воспринимающим модулем 21 и передаваемой первым ременным передаточным механизмом 216.
Электродвигатель 221 размещен в полой части первой основной части 220а. Электродвигатель 221 может быть расположен коаксиально по отношению к корпусу 220 (то есть так, что оси вращения электродвигателя 221 и корпуса 220 совпадают друг с другом). При размещении электродвигателя 221 коаксиально по отношению к корпусу 220 уменьшается дисбаланс вращающейся части модуля 22 приложения крутящего момента, и вращающаяся часть может вращаться плавно (то есть может вращаться с меньшими излишними колебаниями частоты вращения и крутящего момента). Статор 221b электродвигателя 221 прикреплен к первой основной части 220а посредством множества болтов 220b. Фланец 221с на выходной стороне электродвигателя 221 присоединен к корпусу редуктора 222 числа оборотов посредством соединительной трубы 22а. Корпус редуктора 222 числа оборотов прикреплен к фланцу, образованному на левом конце первой основной части 220а. То есть статор 221b электродвигателя 221 и корпус редуктора 222 числа оборотов прикреплены к корпусу 220.
Вал 221s электродвигателя 221 соединен с входным валом редуктора 222 числа оборотов, и вал 223, коаксиально размещенный в корпусе 220, соединен с выходным валом редуктора 222 числа оборотов. Крутящий момент на выходе электродвигателя 221 усиливается посредством редуктора 222 числа оборотов и передается валу 223.
Вал 223 опирается с возможностью вращения на два подшипника 220f, предусмотренных на внутренней периферии левой части 220е корпуса 220, имеющей вид вала. Дальняя концевая сторона вала 223 выступает наружу из отверстия, выполненного на левом конце корпуса 220, и опирается с возможностью вращения на подшипник 224С.
Вал 223 соединен со вторым ременным передаточным механизмом 228. Второй ременный передаточный механизм 228 включает в себя ведущий шкив 228а, присоединенный к дальнему концу вала 223, ведомый шкив 228с, присоединенный к валу 241L модуля 24 передачи мощности (фиг.7), при этом вал 241L будет описан позднее, и зубчатый ремень 228b, натянутый между ведущим шкивом 228а и ведомым шкивом 228с. Мощность на выходе модуля 22 приложения крутящего момента передается модулю 24 передачи мощности посредством второго ременного передаточного механизма 228.
Модуль 22 приложения крутящего момента включает в себя устройство 225 для электрического соединения, выполненное с возможностью электрического соединения электродвигателя 221, присоединенного к вращающемуся корпусу 220, с усилителем 221а (фиг.12), установленным снаружи модуля 22 приложения крутящего момента. Устройство 225 для электрического соединения включает в себя по существу цилиндрическую часть 225а в виде вала, соединенную с правой частью 220d корпуса 220, имеющей вид вала, подшипник 225d, выполненный с возможностью обеспечения опоры для части 225а в виде вала с возможностью вращения, множество скользящих контактных колец 225b, присоединенных коаксиально к наружной периферии части 225а в виде вала, множество контактных щеток 225с, находящихся в контакте с наружными периферийными поверхностями скользящих контактных колец 225b, и опорную часть 225е, выполненную с возможностью обеспечения опоры для контактных щеток 225с и подшипника 225d.
Кабель 221d электродвигателя 221 проходит через полую часть части 220d корпуса 220, имеющей вид вала. Множество электрических проводов, образующих кабель 221d, проходят через полую часть части 225а устройства 225 для электрического соединения, имеющей вид вала, и соответственно соединены с соответствующими скользящими контактными кольцами 225b. Контактные щетки 225с соединены с усилителем 221а (фиг.12) посредством непоказанного кабеля.
Модуль 22 приложения крутящего момента включает в себя кодовый датчик 226 вращательного движения, выполненный с возможностью определения частоты вращения корпуса 220. Основная часть кодового датчика 226 вращательного движения присоединена к опорной части 225е устройства 225 для электрического соединения, и вал кодового датчика 226 вращательного движения соединен с частью 225а в виде вала.
В модуле 22 приложения крутящего момента, имеющем вышеописанную конфигурацию, статор 221b электродвигателя 221, прикрепленный к корпусу 220, приводится во вращательное движение с частотой вращения, которая пропорциональна скорости движения транспортного средства 1, посредством вращательного движения, «полученного» воспринимающим устройством 21 от поверхности дороги, и одновременно вал 221s электродвигателя 221 приводится во вращательное движение (в данном варианте осуществления вращение вала 221s дополнительно замедляется посредством редуктора 222 числа оборотов), вал 223 обеспечивает передачу вращательного движения, результирующего по отношению к данным двум вращательным движениям, и испытательное колесо W приводится во вращение посредством результирующего вращательного движения.
В данном варианте осуществления наружные диаметры воспринимающего колеса 211 и испытательного колеса W являются одинаковыми, числа зубьев ведущего шкива 216а и ведомого шкива 216с первого ременного передаточного механизма 216 являются одинаковыми, и числа зубьев ведущего шкива 228а и ведомого шкива 228с второго ременного передаточного механизма 228 являются одинаковыми. То есть силовой агрегат 20 по данному варианту осуществления выполнен с такой конфигурацией, что испытательное колесо W приводится во вращательное движение с окружной скоростью, равной скорости движения транспортного средства 1, в состоянии, в котором прекращено приведение электродвигателя 221 в действие.
При встраивании модуля 22 приложения крутящего момента в силовой агрегат 20 становится возможным разделение источника энергии на источник энергии (воспринимающий модуль 21), предназначенный для регулирования частоты вращения испытательного колеса W, и источник энергии (электродвигатель 221), предназначенный для регулирования крутящего момента. Посредством этого становится возможным уменьшение мощности каждого источника энергии, и становится возможным регулирование частоты вращения и крутящего момента, приложенного к испытательному колесу W, с более высокой точностью. Кроме того, поскольку в данном варианте осуществления воспринимающий модуль 21, который получает часть кинетической энергии транспортного средства 1 и повторно использует данную кинетическую энергию как источник энергии, выбран в качестве источника энергии для регулирования частоты вращения, не требуется электродвигатель для регулирования частоты вращения. Следовательно, обеспечиваются уменьшение габаритов, снижение веса и уменьшение стоимости источника энергии для регулирования частоты вращения.
Как описано выше, электродвигатель 221 представляет собой источник энергии/мощности для создания тормозной/движущей силы (крутящего момента), подлежащей(-го) приложению к испытательному колесу W. Требуется, чтобы электродвигатель 221 точно воспроизводил внезапное изменение крутящего момента, прикладываемого к шине во время торможения/приведения в движение, и электродвигатель 221 должен обладать способностью обеспечивать значительное ускорение для отражения внезапного изменения крутящего момента. В данном варианте осуществления в качестве электродвигателя 221 используется электродвигатель переменного тока с высокой выходной мощностью и ротором с ультранизкой инерцией, в котором момент инерции ротора составляет 0,1 кг∙м2 или менее и номинальная выходная мощность составляет от 7 кВт до 37 кВт. При использовании такого серводвигателя переменного тока с высокой выходной мощностью и ротором с ультранизкой инерцией становится возможным приложение тормозной/движущей силы, которая изменяется с высокой частотой, превышающей 100 Гц, к испытательному колесу W.
Фиг.7 представляет собой схематическое изображение, иллюстрирующее схематическую конструкцию модуля 24 передачи мощности. Модуль 24 передачи мощности включает в себя валы 241L и 241R, подшипники 242L и 242R, датчик 244 крутящего момента и подвижный шарнир 245 равных угловых скоростей. Валы 241L и 241R опираются с возможностью вращения на соответствующие подшипники 242L и 242R и соединены друг с другом посредством датчика 244 крутящего момента. Крутящий момент, передаваемый модулем 24 передачи мощности, определяется датчиком 244 крутящего момента. Ведомый шкив 228с второго ременного передаточного механизма 228 присоединен к левому концу вала 241L. Правый конец вала 241R соединен с входным валом 245а подвижного шарнира 245 равных угловых скоростей. Выходной вал 245b подвижного шарнира 245 равных угловых скоростей соединен с осью 61 вращения (фиг.10).
Подвижный шарнир 245 равных угловых скоростей выполнен с конфигурацией, обеспечивающей возможность плавной передачи вращения без угловых колебаний независимо от рабочего угла (угла, образованного входным валом 245а и выходным валом 245b). Подвижный шарнир 245 равных угловых скоростей также выполнен с возможностью изменения его длины. Даже если положение и/или ориентация оси 61 вращения изменяются посредством устройства 2а для выставления, сохраняется плавная передача мощности к оси 61 вращения за счет соединения оси 61 вращения посредством подвижного шарнира 245 равных угловых скоростей.
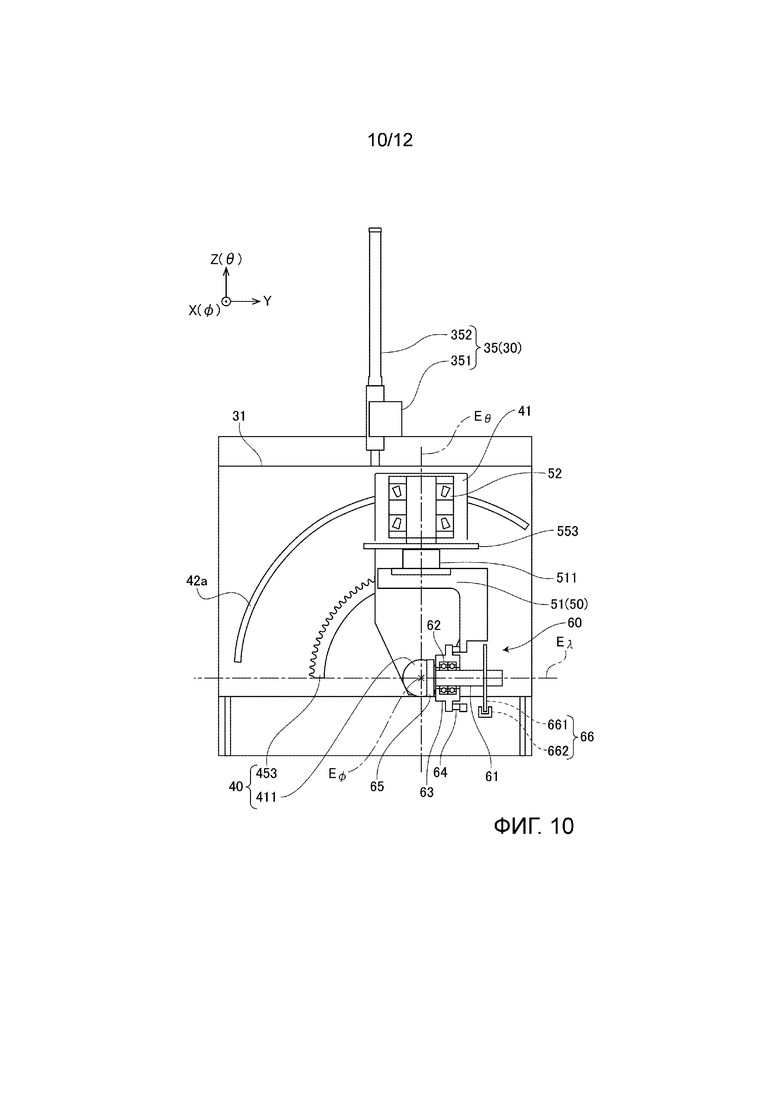
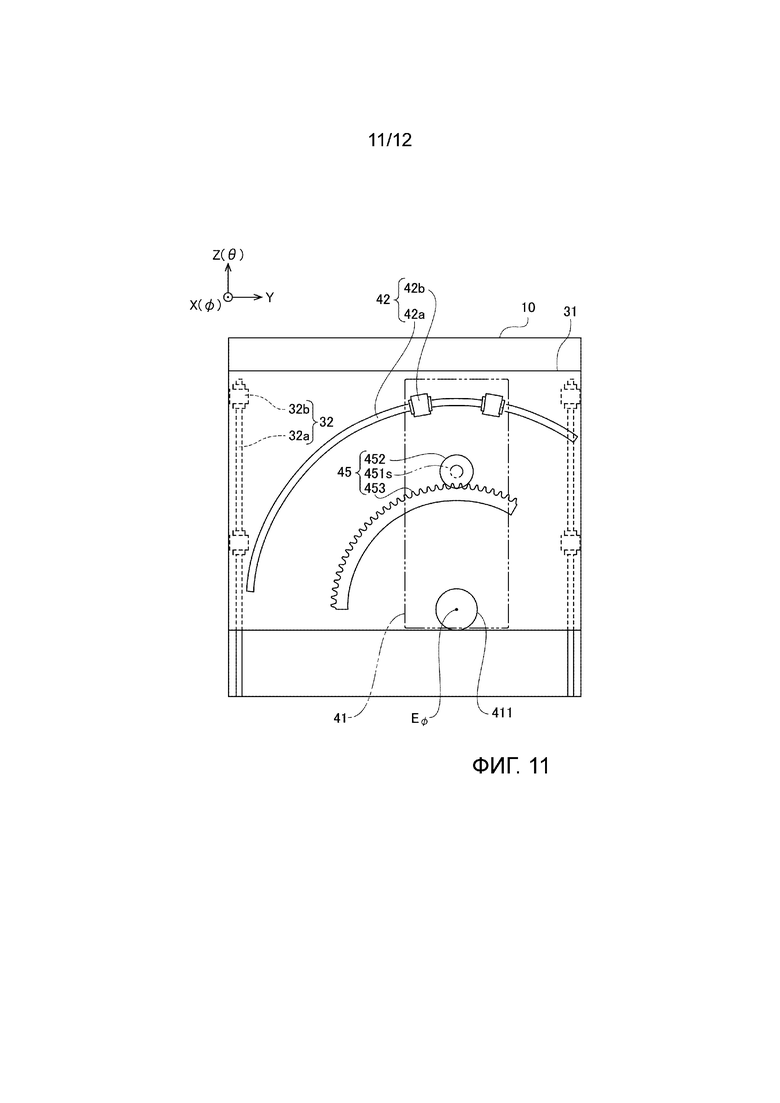
Фиг.8, фиг.9 и фиг.10 представляют собой схематические изображения, иллюстрирующие схематическую конструкцию устройства 2а для выставления. Фиг.11 представляет собой вид по стрелке, выполненный вдоль линии D-D на фиг.9.
Устройство 2а для выставления включает в себя механизм 30 регулирования нагрузки, механизм 40 регулирования угла развала колеса и механизм 50 регулирования угла увода.
Механизм 30 регулирования нагрузки представляет собой механизм, который обеспечивает регулирование нагрузки, приложенной к испытательному колесу W, посредством изменения высоты оси 61 вращения. Механизм 30 регулирования нагрузки включает в себя подъемную раму 31 (первую подвижную раму), которая выполнена с возможностью вертикального перемещения относительно базовой рамы 10, множество устройств 32 для направления прямолинейного перемещения (в данном варианте осуществления три пары устройств 32 для направления прямолинейного перемещения), выполненных с возможностью направления вертикального (в направлении оси Z) перемещения подъемной рамы 31, и приводной блок 35 для обеспечения перемещения вдоль оси Z, выполненный с возможностью приведения подъемной рамы 31 в движение в вертикальном направлении.
Подъемная рама 31 расположена в полой части базовой рамы 10, имеющей форму ворот (∩-образную форму), если смотреть сбоку (то есть если смотреть в направлении оси Y). Устройство 32 для направления прямолинейного перемещения включает в себя направляющую 32а, проходящую вертикально, и одну или более кареток 32b (в данном варианте осуществления две каретки 32b), выполненных с возможностью перемещения по направляющей 32а. Направляющая 32а в каждом устройстве 32 для направления прямолинейного перемещения присоединена к базовой раме 10, и каретка 32b присоединена к подъемной раме 31.
Приводной блок 35 для обеспечения перемещения вдоль оси Z (первый приводной блок) включает в себя электродвигатель 351 и преобразователь 352 движения, выполненный с возможностью преобразования вращательного движения электродвигателя 351 в прямолинейное перемещение в направлении оси Z. Преобразователь 352 движения представляет собой винтовой домкрат, в котором объединены редуктор числа оборотов, такой как червячный редуктор, и механизм с ходовым винтом, такой как шариковый винт. Тем не менее может быть использован другой тип преобразователя движения. Основная часть 352а преобразователя 352 движения прикреплена к базовой раме 10, и подвижная часть (штанга 352b, которая может перемещаться в вертикальном направлении) прикреплена к подъемной раме 31.
Когда преобразователь 352 движения приводится в действие посредством электродвигателя 351, подъемная рама 31 перемещается вертикально вместе со штангой 352b. Соответственно, испытательное колесо W, опирающееся на подъемную раму 31, перемещается в вертикальном направлении посредством механизма 40 регулирования угла развала колеса, механизма 50 регулирования угла увода и узла 60 с осью, и нагрузка, соответствующая высоте испытательного колеса W, действует на испытательное колесо W.
Механизм 40 регулирования угла развала колеса представляет собой механизм для регулирования угла развала колеса, который представляет собой угол наклона испытательного колеса W относительно поверхности дороги, посредством изменения ориентации оси 61 вращения относительно оси Еφ (оси, проходящей в направлении вперед-назад и проходящей через центр испытательного колеса W). Механизм 40 регулирования угла развала колеса включает в себя поворотную раму 41 (вторую подвижную раму), предназначенную для регулирования угла φ развала колеса и выполненную с возможностью поворота вокруг оси Еφ, два подшипника 44, обеспечивающих опору для поворотной рамы 41, предназначенной для регулирования угла φ развала колеса, с возможностью поворота, два устройства 42 для направления криволинейного перемещения, обеспечивающих направление поворота поворотной рамы 41, предназначенной для регулирования угла φ развала колеса, и два приводных блока 45, а именно левый и правый приводные блоки 45 для регулирования угла φ развала колеса (вторые приводные блоки), обеспечивающие приведение поворотной рамы 41, предназначенной для регулирования угла φ развала колеса, во вращательное движение.
Как показано на фиг.8, поворотная рама 41, предназначенная для регулирования угла φ развала колеса, и подъемная рама 31 также имеют форму ворот (∩-образную форму), если смотреть в направлении оси Y. Поворотная рама 41, предназначенная для регулирования угла φ развала колеса, размещена в полости подъемной рамы 31, имеющей ∩-образную форму. Оси 411 поворота, которые выступают наружу (то есть в направлении от оси ЕƟ, описанной позднее) коаксиально по отношению к оси Еφ, предусмотрены на тех частях поворотной рамы 41, предназначенной для регулирования угла φ развала колеса, которые образуют стенки, соответственно с передней стороны и задней стороны. Оси 411 поворота опираются с возможностью поворота на соответствующие два подшипника 44, прикрепленных к подъемной раме 31. Поворотная рама 41, предназначенная для регулирования угла φ развала колеса, опирается с возможностью поворота вокруг оси Еφ на оси 411 поворота как опорные штанги. Следует отметить, что подшипники 44 могут быть присоединены к поворотной раме 41, предназначенной для регулирования угла φ развала колеса, и оси 411 поворота могут быть присоединены к подъемной раме 31.
Устройство 42 для направления криволинейного перемещения включает в себя дугообразную криволинейную направляющую 42а, расположенную концентрически по отношению к оси Еφ, и одну или более кареток 42b (в данном варианте осуществления две каретки 42b), которые могут перемещаться по криволинейной направляющей 42b. Один из двух элементов, представляющих собой криволинейную направляющую 42а и каретку 42b, присоединен к подъемной раме 31, и другой из данных двух элементов присоединен к поворотной раме 41, предназначенной для регулирования угла φ развала колеса.
Как проиллюстрировано на фиг.11, приводной блок 45 для регулирования угла φ развала колеса включает в себя два прямозубых зубчатых колеса 433, присоединенных к частям подъемной рамы 31, образующим стенки, соответственно с передней стороны и задней стороны, две шестерни 452, входящие в зацепление с соответствующими двумя прямозубыми зубчатыми колесами 452, и два электродвигателя 451, выполненных с возможностью приведения соответствующих двух шестерен 452 во вращательное движение. Каждое прямозубое зубчатое колесо 453 представляет собой зубчатый сегмент, образованный с дугообразной формой вокруг оси Еφ (то есть коаксиально относительно оси Еφ). Каждый электродвигатель 451 присоединен к поворотной раме 41, предназначенной для регулирования угла φ развала колеса, и каждая шестерня 452 присоединена к валу 451s электродвигателя 451.
Когда шестерни 452 приводятся во вращательное движение посредством электродвигателей 451, шестерни 452 «катятся» по начальным цилиндрам прямозубых зубчатых колес 453, и поворотная рама 41, предназначенная для регулирования угла φ развала колеса, поворачивается вокруг оси Еφ вместе с электродвигателями 451 и шестернями 452, присоединенными к их валам, относительно подъемной рамы 31, с которой прямозубые зубчатые колеса 453 соединены с образованием одного целого с ней. Соответственно, испытательное колесо W, которое опирается на поворотную раму 41, предназначенную для регулирования угла φ развала колеса, посредством механизма 50 регулирования угла увода и узла 60 с осью, поворачивается вокруг оси Еφ, и угол развала колеса изменяется. Следует отметить, что прямозубые зубчатые колеса 453 могут быть присоединены к поворотной раме 41, предназначенной для регулирования угла φ развала колеса, и электродвигатели 451 могут быть присоединены к подъемной раме 31.
Механизм 50 регулирования угла увода представляет собой механизм, выполненный с возможностью регулирования угла увода, который представляет собой угол наклона испытательного колеса W (более конкретно, центральной плоскости колеса, перпендикулярной к оси) относительно направления движения (направления оси Х) транспортного средства 1, посредством изменения ориентации оси 61 вращения относительно оси ЕƟ (оси, проходящей вертикально через центр испытательного колеса W). Как проиллюстрировано на фиг.8, механизм 50 регулирования угла увода включает в себя поворотную раму 51 (третью подвижную раму), предназначенную для регулирования угла Ɵ увода и выполненную с возможностью поворота вокруг оси ЕƟ, подшипник 52, который обеспечивает опору для поворотной рамы 51, предназначенной для регулирования угла Ɵ увода, с возможностью поворота, и приводной блок 55 для регулирования угла Ɵ увода, выполненный с возможностью приведения поворотной рамы 51, предназначенной для регулирования угла Ɵ увода, во вращательное движение.
Поворотная рама 51, предназначенная для регулирования угла Ɵ увода, размещена в полости поворотной рамы 41, предназначенной для регулирования угла φ развала колеса и имеющей ∩-образную форму, если смотреть в направлении оси Y. Ось 511 поворота, выступающая коаксиально по отношению к оси ЕƟ, предусмотрена на верхней поверхности поворотной рамы 51, предназначенной для регулирования угла Ɵ увода. Ось 511 поворота опирается с возможностью поворота на подшипник 52, прикрепленный к верхней плите поворотной рамы 41, предназначенной для регулирования угла φ развала колеса. Поворотная рама 51, предназначенная для регулирования угла Ɵ увода, опирается с возможностью поворота вокруг оси ЕƟ на ось 511 поворота как опорную штангу.
Приводной блок 55 для регулирования угла Ɵ увода включает в себя прямозубое зубчатое колесо 553, которое присоединено к поворотной раме 51, предназначенной для регулирования угла Ɵ увода, шестерню 552, входящую в зацепление с прямозубым зубчатым колесом 553, и электродвигатель 551 для приведения шестерни 552 во вращательное движение. Прямозубое зубчатое колесо 553 коаксиально соединено с осью 511 поворота. Электродвигатель 551 присоединен к поворотной раме 41, предназначенной для регулирования угла φ развала колеса, и шестерня 552 соединена с валом электродвигателя 551.
Как проиллюстрировано на фиг.10, узел 60 с осью присоединен к нижнему концу поворотной рамы 51, предназначенной для регулирования угла Ɵ увода. Узел 60 с осью включает в себя раму 63, присоединенную к поворотной раме 51, предназначенной для регулирования угла Ɵ увода, подшипник 62, присоединенный к раме 63, ось 61 вращения, опирающуюся на подшипник 62 с возможностью вращения, шестикомпонентный датчик 64 сил и моментов, выполненный с возможностью определения силы, действующей на ось 61 вращения, дисковый тормоз 66 (тормозное устройство), выполненный(-ое) с возможностью подавления вращения оси 61 вращения, и ступицу 65 колеса, коаксиально присоединенную к дальнему концу оси 61 вращения. Обод Wr колеса (фиг.1), представляющего собой испытательное колесо W, подлежит присоединению к ступице 65 колеса.
Рама 63 узла 60 с осью присоединена к поворотной раме 51, предназначенной для регулирования угла Ɵ увода, посредством шестикомпонентного датчика 64 сил и моментов. Шестикомпонентный датчик 64 сил и моментов включает в себя множество пьезоэлектрических элементов (в данном варианте осуществления четыре пьезоэлектрических элемента). Множество пьезоэлектрических элементов расположены с постоянными интервалами на окружности с центром на оси Еλ, расположены между рамой 63 узла 60 с осью и поворотной рамой 51, предназначенной для регулирования угла Ɵ увода, прикреплены болтами, предназначенными для присоединения рамы 63 узла 60 с осью к поворотной раме 51, предназначенной для регулирования угла Ɵ увода, и подвергнуты предварительному нагружению. Отверстие, через которое проходит болт, образовано для каждого пьезоэлектрического элемента, так что обеспечивается равномерное приложение предварительной нагрузки.
Дисковый тормоз 66 включает в себя дисковый ротор 661, коаксиально присоединенный к дальнему концу оси 61 вращения, и тормозную скобу 662 с приводом, присоединенную к раме 63. Тормозная сила действует на ось 61 вращения, когда дисковый ротор 661 зажимается с обеих сторон двумя тормозными накладками, встроенными в тормозную скобу 662.
Устройство 2а для выставления выполнено с такой конфигурацией, что ось ЕƟ, ось Еφ и ось Еλ пересекаются в одной точке в центре испытательного колеса W, так что положение испытательного колеса W не смещается даже при изменении угла развала колеса (угла φ) или угла увода (угла Ɵ).
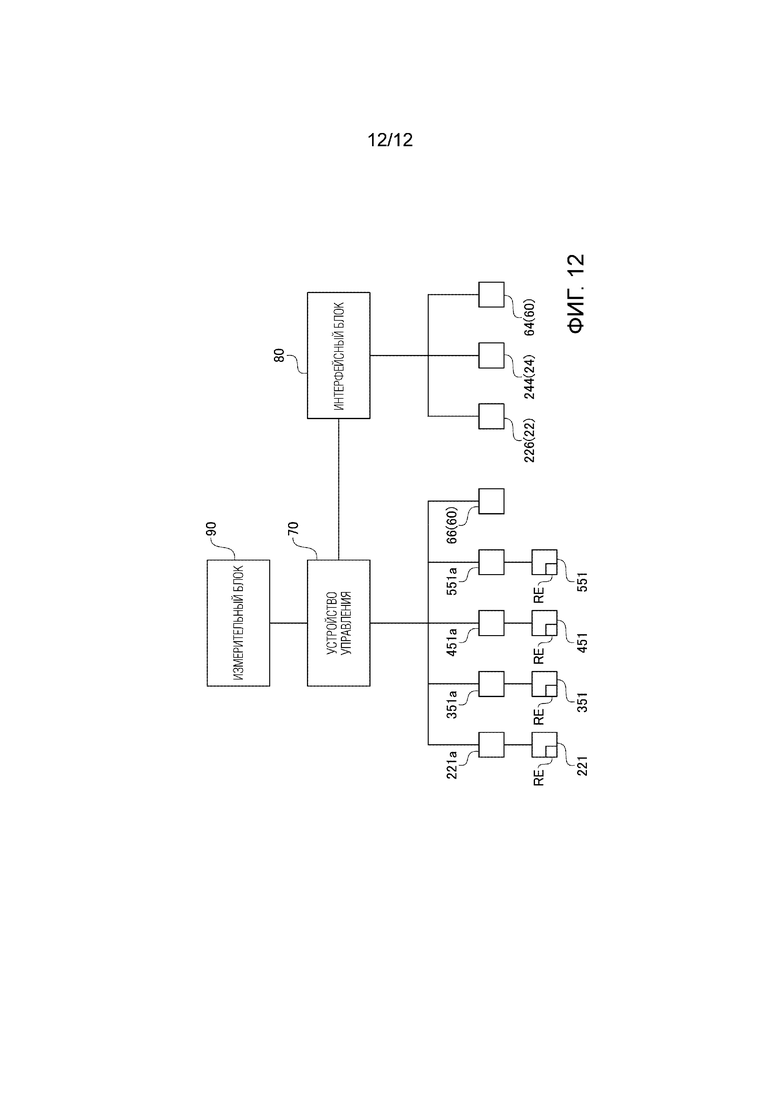
Фиг.12 представляет собой блок-схему, иллюстрирующую схематическую конфигурацию системы управления, предусмотренной в устройстве для ходовых испытаний шин. Система управления включает в себя устройство 70 управления, выполненное с возможностью управления работой всего устройства, измерительный блок 80, выполненный с возможностью осуществления различных измерений, и интерфейсный блок 90, выполненный с возможностью ввода и вывода данных и коммуникации с внешней средой.
Электродвигатель 221 модуля 22 приложения крутящего момента, электродвигатель 351 механизма 30 регулирования нагрузки, электродвигатель 451 механизма 40 регулирования угла развала колеса и электродвигатель 551 механизма 50 регулирования угла увода соединены с устройством 70 управления посредством соответствующих усилителей 221а, 351а, 451а и 551а. Тормозная скоба 662 дискового тормоза 66 также соединена с устройством 70 управления.
Устройство 70 управления и каждый из усилителей 221а, 351а, 451а и 551а соединены с возможностью передачи сигналов посредством оптических волокон, и между устройством 70 управления и каждым из усилителей 221а, 351а, 451а и 551а может осуществляться высокоскоростная передача данных по каналу управления с обратной связью. Это обеспечивает возможность синхронного управления с более высокой точностью (высокой разрешающей способностью и высокой точностью относительно оси времени).
Шестикомпонентный датчик 64 сил и моментов, предусмотренный в узле 60 с осью, кодовый датчик 226 вращательного движения, предусмотренный в модуле 22 приложения крутящего момента, и датчик 244 крутящего момента, предусмотренный в модуле 24 передачи мощности, соединены с измерительным блоком 80. В измерительном блоке 80 после того, как аналоговые сигналы от шестикомпонентного датчика 64 сил и моментов (множества пьезоэлектрических элементов) будут усилены и преобразованы в цифровые сигналы, определяются измеренные значения шести составляющих сил (сил Fx, Fy и Fz, действующих в направлениях оси Х, оси Y и оси Z, и моментов Mx, My и Mz вокруг соответствующих осей) на основе цифровых сигналов. В измерительном блоке 80 после усиления аналогового сигнала от датчика 244 крутящего момента и преобразования данного сигнала в цифровой сигнал на основе цифрового сигнала определяется измеренное значение крутящего момента на испытательном колесе W.
Порции информации о фазах, определенных кодовыми датчиками RE вращательного движения, встроенными в соответствующие электродвигатели 221, 351, 451 и 551, вводятся в устройство 70 управления посредством соответствующих усилителей 221а, 351а, 451а и 551а.
Интерфейсный блок 90 включает в себя, например, одно или более из пользовательского интерфейса, предназначенного для выполнения ввода данных пользователем и вывода данных для пользователя, сетевого интерфейса, предназначенного для соединения с различными сетями, такими как локальная сеть (LAN), и различных коммуникационных интерфейсов, таких как универсальная последовательная шина (USB) и универсальная интерфейсная шина (GPIB), предназначенных для соединения с внешними устройствами. Пользовательский интерфейс включает в себя, например, один/одно или более из различных переключателей режимов работы, индикаторов, различных устройств отображения, таких как жидкокристаллический дисплей (LCD), различных указывающих устройств, таких как мышь и сенсорная панель, и различных устройств ввода/вывода, таких как сенсорный экран, видеокамера, принтер, сканер, устройство звуковой сигнализации, динамик, микрофон и устройство для считывания с карты памяти/ записи на карту памяти.
Устройство 70 управления приводит в действие электродвигатель 221 модуля 22 приложения крутящего момента так, чтобы было устранено рассогласование между измеренным значением и заданным значением крутящего момента на испытательном колесе W. Следует отметить, что управление приведением в действие электродвигателя 221 может осуществляться на основе измеренного значения крутящего момента My, определенного шестикомпонентным датчиком 64 сил и моментов.
Вышеизложенное представляет собой описание вариантов осуществления настоящего изобретения. Варианты осуществления настоящего изобретения не ограничены вышеописанными, и возможны различные модификации. Например, конфигурации, полученные посредством соответствующего комбинирования таких конфигураций, как варианты осуществления, явным образом проиллюстрированные в настоящем описании, и/или таких конфигураций, как варианты осуществления, очевидные для специалистов в данной области техники из описания в настоящем описании, также включены в варианты осуществления настоящей заявки.
В вышеописанных вариантах осуществления серводвигатели (электродвигатели 221, 351, 451 и 551) используются для приведения в действие соответственно модуля 22 приложения крутящего момента и механизмов регулирования (механизма 30 регулирования нагрузки, механизма 40 регулирования угла развала колеса и механизма 50 регулирования угла увода), предусмотренных в устройстве 2а для выставления. Тем не менее могут быть использованы другие типы электродвигателя, такие как серводвигатель постоянного тока или шаговый двигатель, выполненный с возможностью регулирования величины управляющего воздействия (угла поворота).
Зубчатый ремень 228b в вышеописанных вариантах осуществления имеет корды, представляющие собой стальные проволоки. В качестве зубчатого ремня 228b может быть использован ремень, имеющий корды, образованные из так называемых суперволокон, таких как углеродные волокна, арамидные волокна и волокна из полиэтилена с ультравысокой молекулярной массой. При использовании легких и высокопрочных кордов, такие как корды из углеродных волокон, становится возможным использование электродвигателя, имеющего относительно низкую выходную мощность, и становится возможным уменьшение габаритов модуля 22 приложения крутящего момента. В качестве зубчатого ремня 228b также может быть использован широко используемый автомобильный или промышленный синхронизирующий ремень.
Вышеописанные варианты осуществления имеют такую конфигурацию, что тормозная сила может быть приложена к испытательному колесу W с помощью двух механизмов, а именно модуля 22 приложения крутящего момента и дискового тормоза 66. Однако тормозная сила может быть приложена только посредством модуля 22 приложения крутящего момента без выполнения дискового тормоза 66.
В вышеописанных вариантах осуществления, как проиллюстрировано на фиг.4, модуль 22 приложения крутящего момента и модуль 24 передачи мощности, предусмотренные в силовом агрегате 20, установлены на подъемной раме 31 и выполнены с возможностью вертикального перемещения вместе с узлом 60 с осью. Однако весь силовой агрегат 20 может быть установлен на базовой раме 10.
В вышеописанных вариантах осуществления прямозубые зубчатые колеса используются для предназначенного для регулирования угла φ развала колеса, приводного блока 45 механизма 40 регулирования угла развала колеса и для предназначенного для регулирования угла Ɵ увода, приводного блока 55 механизма 50 регулирования угла увода. Однако вместо этого могут быть использованы зубчатые колеса других типов, такие как коническое зубчатое колесо, цилиндрическое червячное колесо и плоское зубчатое колесо.
В вышеописанных вариантах осуществления в каждом из первого ременного передаточного механизма 216 (первого передаточного механизма) и второго ременного передаточного механизма 228 (второго передаточного механизма) используется ременный передаточный механизм, в котором зубчатый ремень используется в качестве намотанного промежуточного средства соединения, но настоящее изобретение не ограничено данной конфигурацией. По меньшей мере в одном из ременных передаточных механизмов вместо зубчатого ремня может быть использован плоский ремень или клиновой ремень. Вместо ременного передаточного механизма могут быть использованы другой тип передаточного механизма с намотанным соединительным средством, такой как цепной передаточный механизм или передаточный механизм с намотанной проволокой, или другие типы механизма передачи мощности, такие как механизм с шариковым винтом, зубчатая передача или гидравлический механизм.
В вышеописанных вариантах осуществления зубчатый ремень, имеющий такую же высокую жесткость, как зубчатый ремень 228b второго ременного передаточного механизма 228, используется в качестве зубчатого ремня 216b первого ременного передаточного механизма 216. Тем не менее, поскольку большой крутящий момент не действует на первый ременный передаточный механизм 216, может быть использован зубчатый ремень, имеющий более низкую жесткость, такой как стандартный синхронизирующий ремень для крупногабаритного транспортного средства.
В вышеописанных вариантах осуществления воспринимающий модуль 21, который получает энергию от поверхности дороги, используется в качестве модуля обеспечения вращательного движения, но настоящее изобретение не ограничено данной конфигурацией. Например, в качестве модуля обеспечения вращательного движения может быть использовано устройство, включающее в себя электродвигатель, такой как серводвигатель или электродвигатель с управлением от инвертора, выполненный с возможностью регулирования частоты вращения, гидравлический двигатель, двигатель внутреннего сгорания или первичный движитель другого типа. Кроме того, механизм (например, зубчатый механизм, ременный механизм или тому подобное), который обеспечивает «разветвление» части энергии, полученной от устройства передачи мощности, предусмотренного в транспортном средстве 1, может быть предусмотрен в качестве воспринимающего модуля 21.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ КОЛЕС | 2021 |
|
RU2824533C1 |
| Стенд для исследования физических процессов в пятне контакта пневматической шины с дорогой | 1976 |
|
SU875239A1 |
| Стенд для исследования физических процессов в пятне контакта шины с опорной поверхностью | 1986 |
|
SU1418595A1 |
| Шинный тестер | 1979 |
|
SU821999A1 |
| Стенд для исследования колес с эластичными шинами | 1972 |
|
SU492778A1 |
| СТАНОК ДЛЯ ИСПЫТАНИЯ ШИН:,.. | 1970 |
|
SU264754A1 |
| Устройство для исследования характеристик шин | 1985 |
|
SU1283588A1 |
| Шинный тестер | 1988 |
|
SU1557469A1 |





Изобретение относится к автомобильной промышленности. Устройство включает в себя транспортное средство и испытательный агрегат, предусмотренный в транспортном средстве и выполненный с возможностью обеспечения опоры для испытательного колеса, на котором установлена испытываемая шина, в состоянии, в котором испытательное колесо находится в контакте с поверхностью дороги. Испытательный агрегат включает в себя силовой агрегат, выполненный с возможностью выработки мощности для приведения испытательного колеса во вращательное движение. Силовой агрегат включает в себя модуль обеспечения вращательного движения, выполненный с возможностью обеспечения вращательного движения с частотой вращения, которая соответствует скорости движения транспортного средства, и модуль приложения крутящего момента, выполненный с возможностью добавления крутящего момента к вращательному движению для выдачи крутящего момента. Технический результат - обеспечение возможности ходового испытания шины без использования гидравлической системы. 12 з.п. ф-лы, 12 ил.
1. Устройство для испытаний шин, содержащее:
транспортное средство и
испытательный агрегат, предусмотренный в транспортном средстве и выполненный с возможностью обеспечения опоры для испытательного колеса, на котором установлена испытываемая шина, в состоянии, в котором испытательное колесо находится в контакте с поверхностью дороги,
при этом испытательный агрегат включает в себя силовой агрегат, выполненный с возможностью выработки мощности для приведения испытательного колеса во вращательное движение,
причем силовой агрегат содержит:
- модуль обеспечения вращательного движения, выполненный с возможностью обеспечения вращательного движения с частотой вращения, которая соответствует скорости движения транспортного средства; и
- модуль приложения крутящего момента, включающий в себя первый электродвигатель и выполненный с возможностью добавления крутящего момента, генерируемого первым электродвигателем, к вращательному движению для выдачи крутящего момента;
при этом модуль обеспечения вращательного движения содержит:
- ведомое колесо, выполненное с возможностью контактирования с поверхностью дороги;
- первую ось, соединенную с ведомым колесом; и
- первый передаточный механизм, выполненный с возможностью соединения первой оси с входным валом модуля приложения крутящего момента.
2. Устройство для испытаний шин по п.1, в котором первый передаточный механизм содержит:
первый ведущий шкив, соединенный с первой осью;
первый ведомый шкив, соединенный с входным валом модуля приложения крутящего момента; и
первый зубчатый ремень, натянутый между первым ведущим шкивом и первым ведомым шкивом.
3. Устройство для испытаний шин по п.1, в котором модуль приложения крутящего момента содержит:
вращающуюся раму, поддерживаемую с возможностью вращения, причем к вращающейся раме присоединен указанный первый электродвигатель; и
первый вал, расположенный коаксиально с вращающейся рамой и соединенный с валом первого электродвигателя,
при этом вращающаяся рама выполнена с возможностью приведения во вращательное движение посредством модуля обеспечения вращательного движения.
4. Устройство для испытаний шин по п.3, содержащее пару вторых подшипников, выполненных с возможностью обеспечения опоры для вращающейся рамы с возможностью вращения,
при этом вращающаяся рама является цилиндрической и содержит:
- часть для размещения электродвигателя, выполненную с возможностью размещения первого электродвигателя; и
- пару частей в виде валов, которые расположены с обеих сторон части для размещения электродвигателя, определяемых в аксиальном направлении, и имеют меньший диаметр, чем часть для размещения электродвигателя,
причем вращающаяся рама опирается с возможностью вращения на указанную пару вторых подшипников в зоне указанной пары частей в виде валов.
5. Устройство для испытаний шин по п.1, в котором испытательный агрегат содержит:
узел с осью, выполненный с возможностью обеспечения опоры для испытательного колеса с возможностью вращения; и
устройство для выставления, выполненное с возможностью регулирования ориентации испытательного колеса и нагрузки, действующей на испытательное колесо.
6. Устройство для испытаний шин по п.5, в котором устройство для выставления содержит механизм регулирования нагрузки, выполненный с возможностью регулирования нагрузки, действующей на испытательное колесо,
причем механизм регулирования нагрузки включает в себя:
первую подвижную раму, выполненную с возможностью вертикального перемещения;
устройство для направления прямолинейного перемещения, выполненное с возможностью направления вертикального перемещения первой подвижной рамы; и
первый приводной блок, выполненный с возможностью приведения первой подвижной рамы в движение в вертикальном направлении.
7. Устройство для испытаний шин по п.6, в котором испытательный блок включает в себя базовую раму, прикрепленную к раме транспортного средства, и
причем устройство для направления прямолинейного перемещения содержит:
- направляющую, присоединенную к одной из базовой рамы и первой подвижной рамы; и
- каретку, присоединенную к другой из базовой рамы и первой подвижной рамы и выполненную с возможностью перемещения по направляющей;
при этом первый приводной блок содержит:
- преобразователь движения; и
- второй электродвигатель, выполненный с возможностью приведения в действие преобразователя движения,
причем преобразователь движения включает в себя:
- основную часть, присоединенную к базовой раме; и
- подвижную часть, выполненную с возможностью вертикального перемещения относительно основной части,
при этом первая подвижная рама прикреплена к указанной подвижной части.
8. Устройство для испытаний шин по п.5, в котором устройство для выставления включает в себя механизм регулирования угла развала колеса, выполненный с возможностью регулирования угла развала испытательного колеса;
при этом механизм регулирования угла развала колеса включает в себя:
вторую подвижную раму, выполненную с возможностью поворота вокруг оси Еϕ, параллельной направлению движения транспортного средства;
первую ось поворота, выступающую от второй подвижной рамы коаксиально с осью Еϕ;
третий подшипник, выполненный с возможностью обеспечения опоры для первой оси поворота с возможностью поворота; и
приводной блок для регулирования угла ϕ развала колеса, выполненный с возможностью приведения второй подвижной рамы во вращательное движение.
9. Устройство для испытаний шин по п.8, дополнительно содержащее устройство для направления криволинейного перемещения, выполненное с возможностью направления поворота второй подвижной рамы.
10. Устройство для испытаний шин по п.8, в котором устройство для выставления включает в себя механизм регулирования угла увода, выполненный с возможностью регулирования угла увода испытательного колеса,
при этом механизм регулирования угла увода содержит:
третью подвижную раму, выполненную с возможностью поворота вокруг оси Еθ, ортогональной к каждой из оси Еλ, представляющей собой ось вращения испытательного колеса, и оси Еϕ;
вторую ось поворота, выступающую от третьей подвижной рамы коаксиально с осью Еθ;
четвертый подшипник, выполненный с возможностью обеспечения опоры для второй оси поворота с возможностью поворота; и
приводной блок для регулирования угла θ увода, выполненный с возможностью приведения третьей подвижной рамы во вращательное движение.
11. Устройство для испытаний шин по п.5, в котором узел с осью содержит:
ось вращения;
пятый подшипник, выполненный с возможностью обеспечения опоры для оси вращения с возможностью вращения; и
ступицу колеса, которая коаксиально присоединена к дальнему концу оси вращения и к которой должно быть присоединено испытательное колесо.
12. Устройство для испытаний шин по п.11, в котором узел с осью включает в себя тормозное устройство, выполненное с возможностью торможения вращения оси вращения.
13. Устройство для испытаний шин по п.11, дополнительно содержащее модуль передачи мощности, выполненный с возможностью передачи выходной мощности от силового агрегата к оси вращения,
при этом модуль передачи мощности включает в себя подвижный шарнир равных угловых скоростей, имеющий один конец, присоединенный к оси вращения.
| JP 2013156087 A, 15.08.2013 | |||
| WO 2012141170 A1, 18.10.2012 | |||
| JP 20178989 A, 12.01.2017. |

