Изобретение относится к способам определения механических свойств материалов путем вдавливания индентора в поверхность образца с заданной нагрузкой, а именно к способам определения статического модуля упругости Юнга (ниже модуль упругости).
Известен способ определения модуля упругости [Способ определения модуля упругости Юнга материалов, пат. 2292029 Рос. Федерация: МПК G01IN 3/08 Вахрушев А.В., Липанов A.M., Шушков А.А., заявитель и патентообладатель Ижевск, ин-т прикладной механики. - №2005114036/28; заявл. 06.05.2005; опубл. 20.01.2007, Бюл. №2. 6 с.: ил.6], основанный на том, что проводят экспериментальное сжатие шарообразной наночастицы сосредоточенной силой, вычисляют перемещение в точке действия силы на наночастицу; проводят расчет зависимости перемещений от радиуса наночастицы при ее сжатии сосредоточенными силами с помощью компьютерного эксперимента методом молекулярной динамики; сравнивают экспериментальную зависимость перемещения в точке действия силы на наночастицу и зависимость перемещений от радиуса наночастицы, полученную с помощью компьютерного эксперимента с аналитическим решением зависимости перемещений от радиуса упругого шара, сжимаемого сосредоточенными силами, приложенными в противоположные концы диаметра для справочных значений модуля упругости и коэффициента поперечных деформаций исследуемого материала; изменяя модуль упругости, находят такие его значения, при которых совпадают экспериментальная зависимость перемещения в точке действия силы на наночастицу и полученная с помощью компьютерного моделирования зависимость перемещений от радиуса наночастицы с аналитической зависимостью перемещений от радиуса упругого шара, сжимаемого сосредоточенными силами; вычисляют модуль упругости как среднеарифметическое значение, полученное из двух сравнений.
Недостатком указанного способа определения модуля упругости является его применимость только к частицам шарообразной формы.
Наиболее близким к заявляемому техническому решению, принятым за прототип [Oliver W., Pharr G. An Improved Technique for Detemining Hardness and Elastic Modulus Using Load and Displacement Sensing Indentation Experiments // J. Mater. Res. 1992. №7 (6). P.1564-1583], является способ определения модуля упругости, основанный на непрерывной регистрации параметров процесса вдавливания жесткого наконечника правильной формы (пирамидального индентора), глубины его погружения в материал и скорости нагружения. Определяют податливость контакта, пропорциональной тангенсу в точке приложения максимальной нагрузки и площадь контакта индентора с образцом. Рассчитывают приведенный модуль упругости, после чего определяют модуль упругости исследуемого образца материала, исходя из известных значений модуля упругости и коэффициента Пуассона алмазного индентора.
Недостатками указанного способа определения модуля упругости являются: неточность в определении контактной площади индентора с образцом из-за выдавливания или вдавливания материала вокруг отпечатка индентора, индентор должен вдавливаться только в плоскость.
Задача изобретения - устранение указанных недостатков, а именно разработка способа определения модуля упругости материала микро- и наночастиц произвольной формы.
Решение данной задачи разбивается на два этапа: этап стендовых испытаний, этап численных исследований и анализа их результатов.
Этап стендовых испытаний состоит в следующем: производится напыление частиц материала (наноаэрозоля) на рабочую поверхность подложки; осуществляется сканирование и проводится оцифровка точек поверхности с находящимися на них микро- или наночастицами; выполняется позиционирование подложки и индентора любой формы (из набора стендового инструментария) на отсканированную область в районе максимального возвышения (вершины), выбранной для исследования частицы; производится запись данных позиционирования наконечника индентора относительно подложки; осуществляется вдавливание индентора в частицу с силой, воздействие которой заведомо не приводит к превышению порога перехода упругой деформации в пластическую деформацию для тестируемого материала (таким образом, вся деформация материала, произведенная индентором, является обратимой); фиксируются соответствующие значения нагрузки F и глубины вдавливания наконечника индентора в частицу hэксп.
Этап численных исследований и анализа их результатов заключается в следующем: на основании данных оцифровки поверхности исследуемой частицы, а также данных позиционирования индентора и геометрии его контактных поверхностей последовательно генерируются компьютерная электронная геометрическая модель и расчетная конечно-элементная модель области исследования; методом конечных элементов (МКЭ) проводится численное решение контактной задачи вдавливания наконечника индентора в частицу с определением глубины вдавливания hмкэ (расчет ведется исходя из известных значений формы и упругих констант индентора, коэффициента поперечной деформации материала частицы, а также экспериментальной силы индентирования F); по результатам серии численных экспериментов (при фиксированном значении силового воздействия F и с варьированием при каждом расчете величины модуля упругости Е) строится экспериментальная кривая зависимости E(Δh), где Δh=hмкэ-hэксп; на основании полученной зависимости Е(Δh)c помощью аппроксимации при Δh=0 находим значение модуля упругости Е исследуемой частицы.
Таким образом, определяем модуль упругости образца материала микро- и наночастиц.
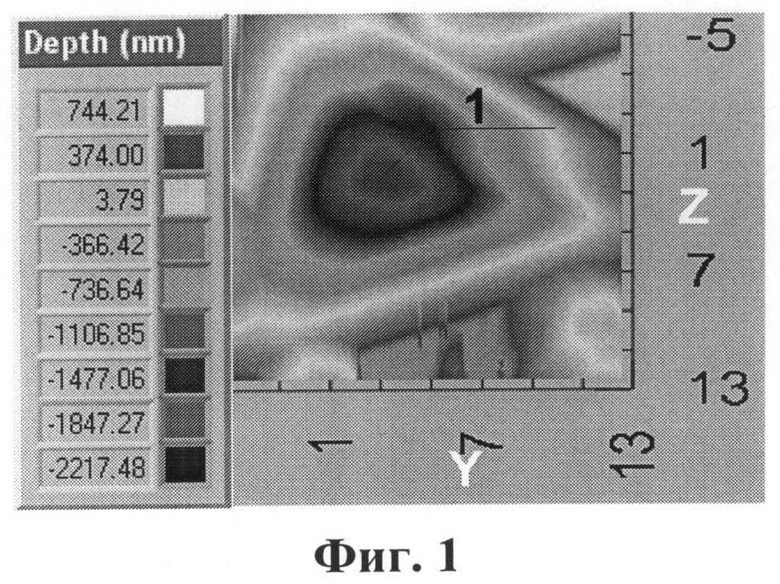
На фиг.1 представлен отсканированный и оцифрованный участок поверхности частицы наноаэрозоля до проведения испытаний индентированием в точку 1. Вид сверху.
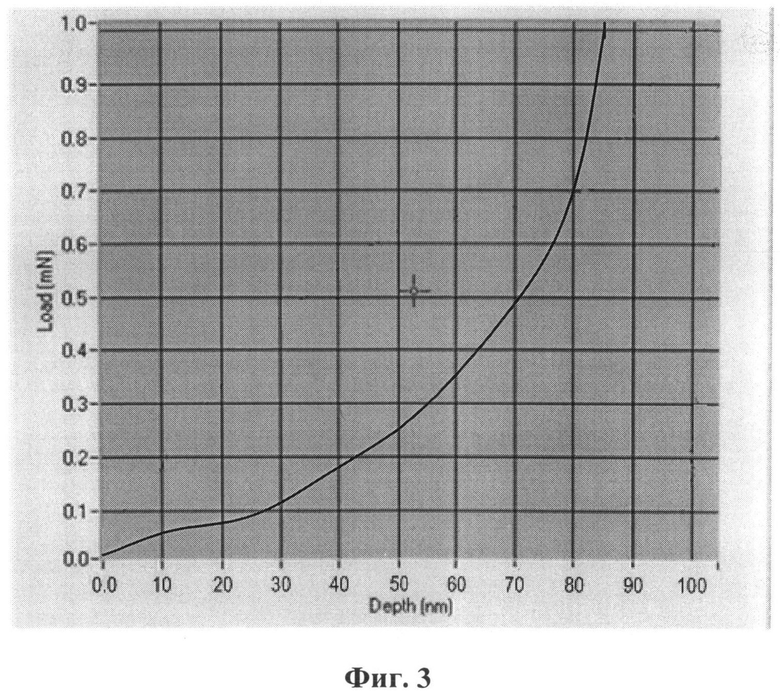
На фиг.2 представлена электронная геометрическая модель исследуемой частицы наноаэрозоля, наконечника индентора и подложки (стекла).
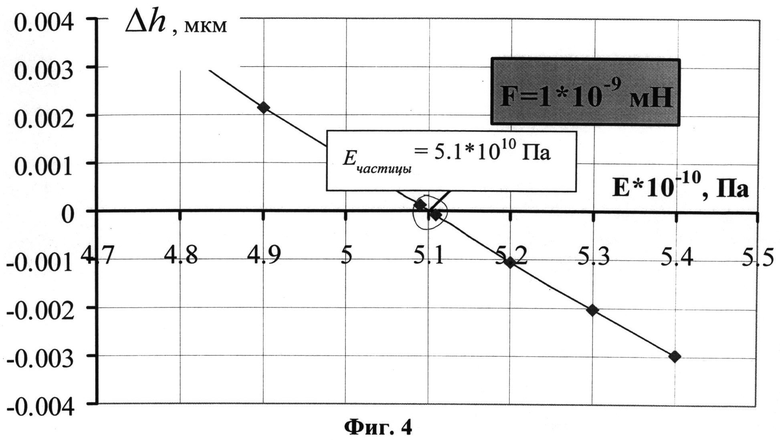
На фиг.3 представлена зависимость прикладываемой силы от глубины внедрения индентора в образец (нагрузка).
На фиг.4 представлена экспериментальная кривая зависимости Е(Δh), для нагрузки индентирования 1 мН. При Δh=0 значение модуля упругости E(Δh) соответствует значению модуля исследуемой частицы.
Заявленный в качестве изобретения способ реализовывался с использованием комплексной системы измерения физико-механических характеристик Nanotest 600 [http://www.micromaterials.co.uk] следующим образом: исследуемым материалом микро- и наночастиц в описании примера являлся наноаэрозоль; сканирование поверхности стекла (подложки) с нанесенными микро- и наночастицами производилось с минимальной нагрузкой сканирования 0.01 мН и заданным шагом сканирования - 0.05 мкм; в эксперименте использовался индентор Берковича с модулем упругости Е=1141 ГПа и коэффициентом поперечной деформации ν=0.07; позиционирование подложки относительно наконечника индентора осуществлялось при помощи пьезодвигателей; экспериментальное вдавливание индентора в исследуемую микро- или наночастицу производилось с силой F=1 мН; была определена глубина вдавливания индентора hэксп=0.085279 мкм; была проведена серия численных решений методом конечных элементов контактной задачи внедрения наконечника индентора в вершину исследуемой частицы с формированием экспериментальной зависимости Е(Δh); для исследуемой локальной частицы путем аппроксимации полученной зависимости при Δh=0 определен модуль упругости Ечастицы=5.1*1010 Па.
Благодаря предложенному способу стало возможным определять модуль упругости материала микро- и наночастиц любой геометрической формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ ЮНГА МАТЕРИАЛА МИКРО- И НАНОЧАСТИЦ | 2015 |
|
RU2611698C1 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| Устройство 3D визуализации деформационного состояния поверхности материала в области упругих деформаций | 2019 |
|
RU2714515C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ МАТЕРИАЛА ПОКРЫТИЯ НА ИЗДЕЛИИ | 2018 |
|
RU2683597C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В ТВЕРДЫХ ПОКРЫТИЯХ НА ПОДАТЛИВЫХ ПОДЛОЖКАХ | 2022 |
|
RU2793300C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ МАТЕРИАЛА ПОКРЫТИЯ НА ИЗДЕЛИИ | 2016 |
|
RU2618500C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОЙСТВ МАТЕРИАЛА НАНОИНДЕНТИРОВАНИЕМ | 2013 |
|
RU2551263C2 |
| Способ измерения области контакта индентора с поверхностью образца | 2021 |
|
RU2771063C1 |
| Способ изготовления дисковых секторов для захвата, удержания и анализа магнитных микрочастиц и меченных ими биологических объектов на поверхности спиновых вентилей с помощью фемтосекундного лазерного облучения | 2019 |
|
RU2704972C1 |
| Способ определения толщины однородного покрытия | 2015 |
|
RU2619133C1 |
Изобретение относится к способам определения механических свойств материалов путем вдавливания индентора в поверхность образца с заданной нагрузкой, а именно к способам определения статического модуля упругости Юнга. Сущность: совместно используют экспериментальное вдавливание индентора и компьютерное моделирование вдавливания индентора методом конечных элементов. Проводят экспериментальное сканирование поверхности частицы, вдавливание индентора в наночастицу заданной силой и определение по упругой составляющей экспериментальной глубины проникновения индентора. Осуществляют генерацию электронной геометрической модели наночастицы, формируют и решают методом конечных элементов контактную задачу вдавливания индентора в частицу в серии экспериментов при постоянном усилии индентирования. Путем варьирования значением модуля упругости добиваются нулевой разницы между экспериментальной и расчетной глубиной проникновения индентора, определяют модуль упругости частицы, соответствующей нулевой разнице расчетной и экспериментальной глубин. Технический результат: разработка способа определения модуля упругости материала микро- и наночастиц произвольной формы. 4 ил.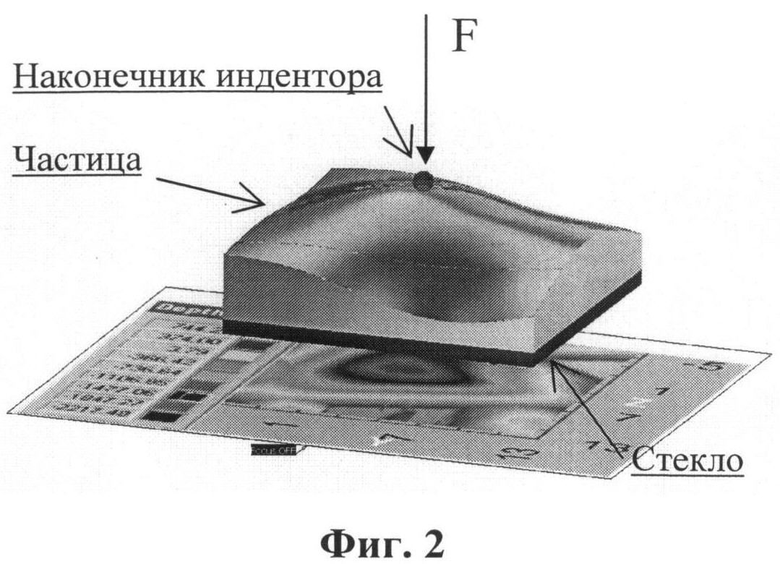
Способ определения модуля упругости Юнга материала микро- и наночастиц путем совместного использования экспериментального вдавливания индентора и компьютерного моделирования вдавливания индентора методом конечных элементов, отличающийся тем, что проводят экспериментальное сканирование поверхности частицы, вдавливание индентора в наночастицу заданной силой, определение по упругой составляющей экспериментальной глубины проникновения индентора, генерацию электронной геометрической модели наночастицы, формируют и решают методом конечных элементов контактную задачу вдавливания индентора в частицу, в серии экспериментов при постоянном усилии индентирования путем варьирования значением модуля упругости добиваются нулевой разницы между экспериментальной и расчетной глубиной проникновения индентора, определяют модуль упругости частицы, соответствующей нулевой разнице расчетной и экспериментальной глубин.
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ ЮНГА МАТЕРИАЛОВ | 2005 |
|
RU2292029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ ЮНГА И КОЭФФИЦИЕНТА ПУАССОНА МАТЕРИАЛА МИКРО- И НАНОЧАСТИЦ | 2005 |
|
RU2297617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ ЮНГА МАТЕРИАЛОВ | 2005 |
|
RU2296972C1 |
| US 20100024534 A1, 04.02.2010. | |||

