Изобретение относится к машиностроению. Из уровня техники известны следующие технические решения [МПК F03G 3/00, F03B 13/00, F03B 15/00].
WO 2021056233 (A1) СПИРАЛЬНЫЙ МЕХАНИЗМ ПЕРЕДАЧИ С ПЕРЕМЕННОЙ СКОРОСТЬЮ, в котором предлагается техническое решение, позволяющее улучшить характеристики передачи движения от двигателя. Данное техническое решение не может быть рассмотрено в качестве аналога, поскольку оно не использует центробежные и инерционные особенности передаточной системы.
WO 2021051373 (A1) - 2021-03-25, МАССОВЫЙ ДЕМПФЕР С НАСТРОЙКОЙ ИНЕРЦИОННОГО УСИЛЕНИЯ МАССЫ, в котором предлагаются технические решения, позволяющие скомпенсировать влияние вращающихся масс различных силовых установок на силовые конструкции зданий и помещений, где они располагаются. В настоящем изобретении инерционная демпфирующая сила усиливается путем регулирования соотношения радиусов шестерен, а параметры демпфирования легко меняются путем регулирования массы блока масс, жесткости пружин и т.д. Поскольку данное техническое решение направлено не на использование центробежных и инерционных движений, а на их компенсацию, рассматривать его в качестве аналога нецелесообразно.
(UA 19477 (A) - 1997-12-25, инерциальный двигатель)
Изобретение относится к машиностроению. Движитель имеет корпус и вал, соединенный с валом автомобильного двигателя. Вал двигателя жестко соединен с валом движителя для передачи крутящего момента вала двигателя непосредственно на барабан, закрепленный на нем внутри кожуха дифференциала, с клетками, помещенными в его радиальные гнезда и заполненными тяжелой массой, с шариковым днищем касаются внутренней поверхности эксцентриковый кожух с образованием наибольшего и наименьшего силовых моментов сепараторов в противоположном по диаметру направлении, при этом разность давящих сил, действующих на кожух, передается по прямой линии на вал, на корпус движителя и его держатель на тележке. Данное техническое решение наиболее близко к предлагаемому способу, поскольку в нем активно используются инерциальные и центробежные движения, оно наиболее близко по назначению к предлагаемому способу, поэтому данное техническое решение предлагается использовать в качестве прототипа. Основным недостатком прототипа является то, что он, фактически, является дополнительным узлом трансмиссии и предназначен для улучшения плавности хода транспортного средства, на котором установлен.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом данного изобретения является создание способа регулирования величины динамического центра массы, позволяющего заменить существующие виды трансмиссий транспортных средств на узел, создающий управляемую линейную тягу без механической связки двигательной установки транспортного средства с подвеской.
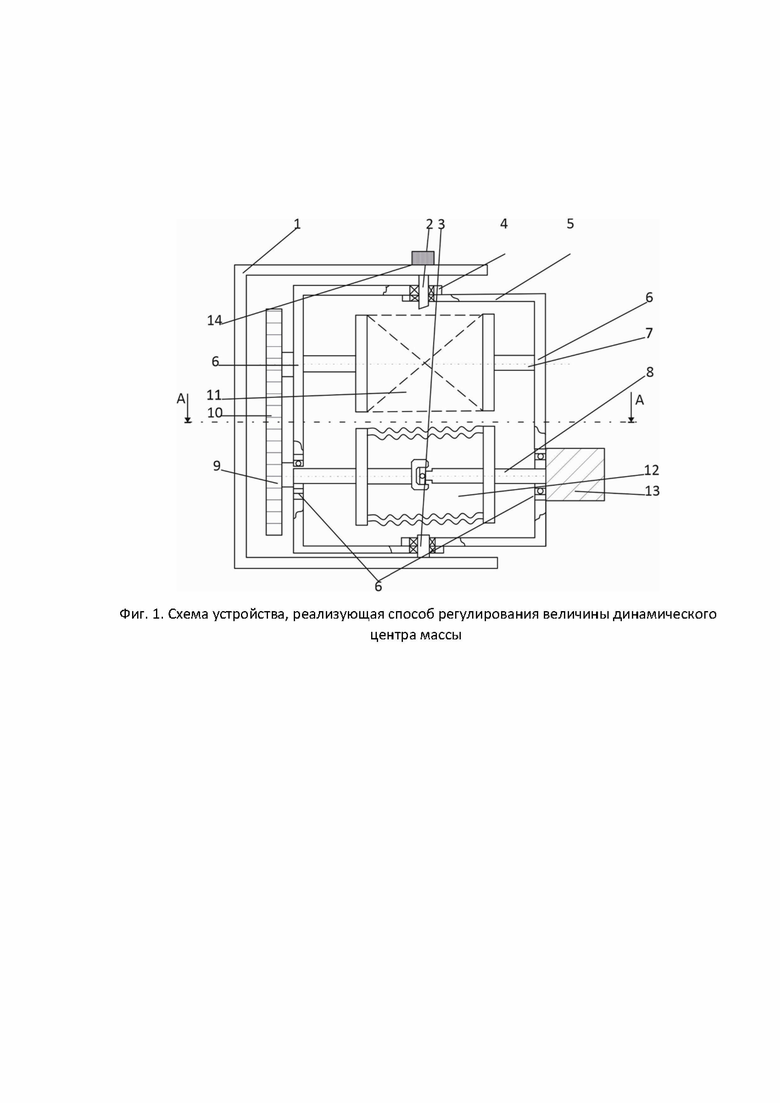
Указанный технический результат достигается за счет того, что в устройстве устанавливаются верхнее рабочее тело 11 и нижнее рабочее тело 12, которые должны вращаться синхронно благодаря шестеренчатым колесам 9 и 10 в противоположных направлениях для того, чтобы нейтрализовать вращательный момент, образующийся при работе ЦИД. Через верхнюю поворотную скобу 4 и нижнюю поворотную скобу 5, проходят две оси: верхняя ось вращения 7 и нижняя ось вращения 8, которые благодаря установленному по их длине карданному сочленению и имеют возможность перегибаться. Оси должны быть установлены таким образом, чтобы ось их изгиба проходила точно по плоскости симметрии, проходящей через верхнюю поворотную ось 2 и нижнюю поворотную ось 3 (фиг. 1). На данные оси вращения, симметрично месту изгиба, устанавливаются верхнее рабочее тело 11 и нижнее рабочее тело 12 (фиг. 1). Верхнее рабочее тело 11 и нижнее рабочее тело 12, показанные на фиг. 1-6, состоят каждое из двух маховиков, жестко закрепленных на верхней оси вращения 7 и нижней оси вращения 8, и соединенных между собой устройством, обеспечивающим перераспределение массы внутри рабочих тел при их деформации, возникающей при повороте внешней поворотной скобы 4 и внутренней поворотной скобы 5 на угол α.
Описание чертежей.
На фиг. 1-3 показаны следующие элементы устройства.
На фиг. 1. представлена схема устройства, реализующая способ регулирования величины динамического центра массы.
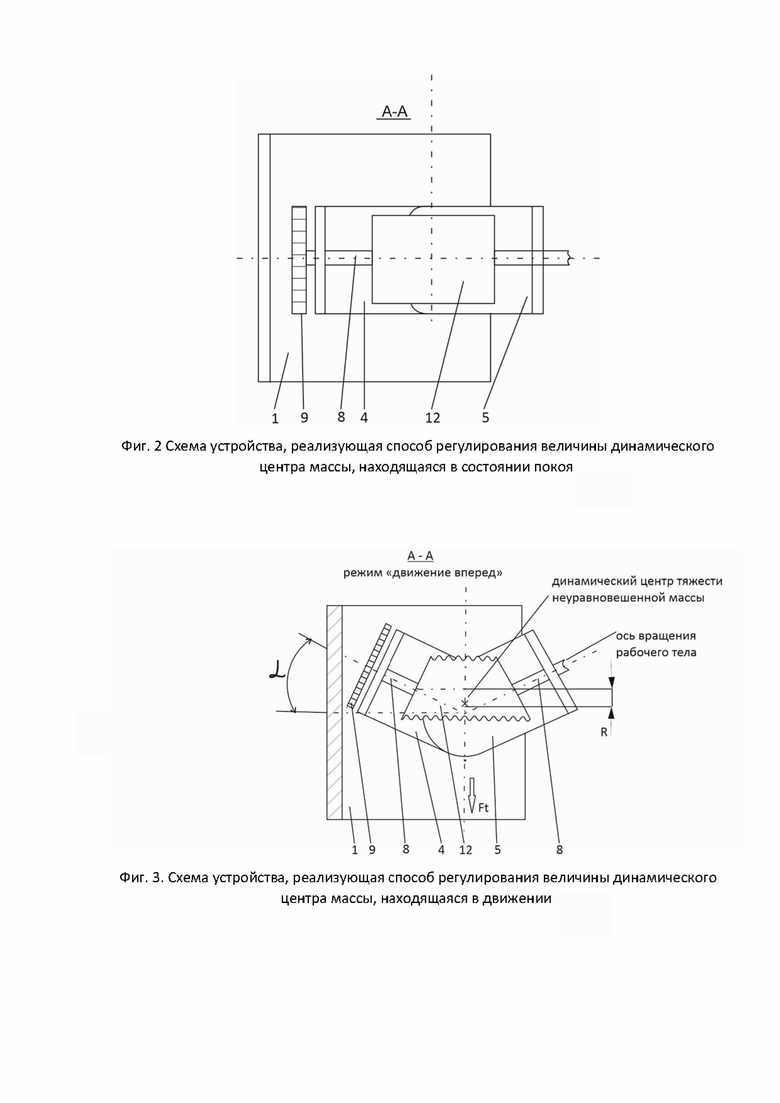
На фиг. 2. представлена схема устройства, реализующая способ регулирования величины динамического центра массы, находящаяся в состоянии покоя.
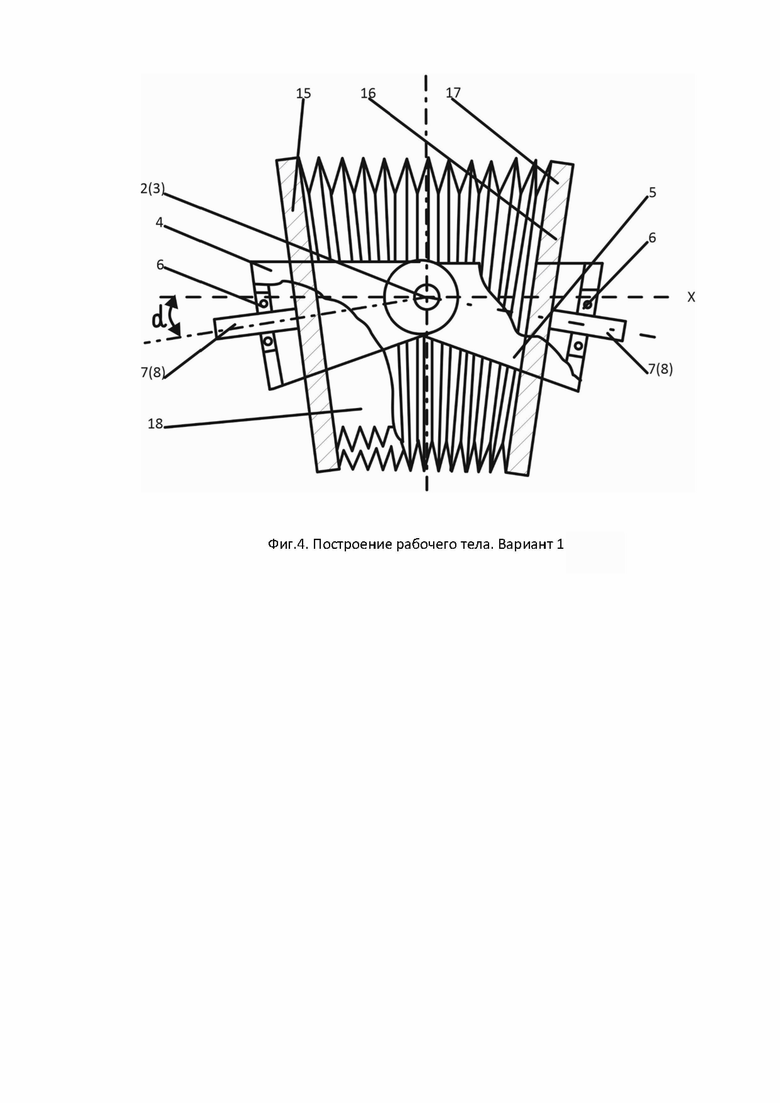
На фиг. 3. представлена схема устройства, реализующая способ регулирования величины динамического центра массы, находящаяся в движении.
На фиг. 4-6 представлены разные варианты построения рабочих тел верхнего рабочего тела 11 и нижнего рабочего тела 12.
На фиг. 1-6 показаны: 1 - корпус устройства; 2 - верхняя поворотная ось; 3 - нижняя поворотная ось; 4 - внешняя поворотная скоба; 5 - внутренняя поворотная скоба; 6 - подшипниковые узлы для осей вращения; 7 - верхняя ось вращения; 8 - нижняя ось вращения; 9, 10 - шестеренчатые колеса; 11 - верхнее рабочее тело; 12 - нижнее рабочее тело; 13 - приводной двигатель, создающий вращение; 14 - сервопривод управления; 15, 16 - маховики; 17 - гибкая оболочка; 18 - вещество с высокой плотностью; 19, 20 - полусферы; 21 - центрирующее кольцо; 22 - обжимное кольцо; 23 - пружина; 24 - шарнирное соединение типа трапеция; 25 - соединительное кольцо; 26 - утяжелители.
Осуществление изобретения.
Устройство, реализующее способ регулирования величины динамического центра массы, содержащее корпус 1, внутри которого по центру верхней и нижней стороны размещены верхняя поворотная ось 2 и нижняя поворотная ось 3, на которых смонтированы внешняя поворотная скоба 4 и внутренняя поворотная скоба 5, с возможностью кругового движения на осях 2 и 3, по центру боковых частей которых выполнены подшипниковые узлы 6, предназначенные для установки верхней оси вращения 7 и нижней оси вращения 8. На выходе верхней оси вращения 7 и нижней оси вращения 8 из внешней поворотной скобы 4 через подшипниковые узлы 6 установлены шестеренчатые колеса 9 и 10, предназначенные для передачи вращательного движения от нижней оси вращения 8 к верхней оси вращения 7 и синхронизации их вращения в противоположных направлениях; верхняя ось вращения 7 и нижняя ось вращения 8 для обеспечения возможности поворота скоб 4 и 5 состоят из двух частей, соединенных между собой сочленением типа карданного соединения, пересекающую строго через линию, проходящую через оси симметрии осей 2 и 3, при круговом движении на осях 2 и 3 в обе стороны, содержащих в своей центральной части карданные соединения выходе верхней оси вращения 7 и нижней оси вращения 8; верхнее рабочее тело 11 и нижнее рабочее тело 12 монтируются в центральной части верхней оси вращения 7 и нижней оси вращения 8, соединенной с двигателем 13, расположенным с внешней части внутренней поворотной скобы 5 и передающим вращательное движения на нижнюю ось вращения 8; сервопривод управления 14, расположенный на корпусе 1, выполняющий функцию симметричного поворота внешней поворотной скобы 4 и внутренней поворотной скобы 5, с одновременным изломом верхней оси вращения 7 и нижней оси вращения 8 для деформации верхнего рабочего тела 11 и нижнего рабочего тела 12 с целью перераспределения их переменной массы по объему рабочих тел и смещения центра массы от оси симметрии вращения для создания дисбаланса.
Заявленное техническое решение используют следующим образом.
При деформации рабочего тела в результате поворота на угол α внешней поворотной скобы 4 и внутренней поворотной скобы 5 на верхней поворотной оси 2 и нижней поворотной оси 3, как на фиг. 1, фиг. 3, происходит перераспределение рабочего вещества по объему рабочего тела асимметрично относительно продольной оси вращения, в результате чего образуется не скомпенсированная масса, центр тяжести которой не совпадает с осью вращения и удален от нее на расстояние R. Величина значения не скомпенсированной массы и расстояния R зависят от угла поворота α внешней поворотной скобы 4 и внутренней поворотной скобы 5. Направление вектора тяги ЦИД так же зависит от направления их поворота относительно нейтрального симметричного положения (фиг. 3). Таким образом создается линейная управляемая тяга.
Варианты построения верхнего рабочего тела 11 и нижнего рабочего тела 12 изображены на фиг. 4-6.
Вариант 1 построения рабочего тела представлен на фиг. 4.
Маховики 15, 16, жестко закреплены на верхней оси вращения 7 (и нижней оси вращения 8), симметрично относительно центра шарнирного соединения места излома оси вращения, и соединены между собой герметично гибкой оболочкой 17 типа сильфона.
Пространство, образованное между маховиками и сильфоном, заполняется рабочим жидким, либо сыпучим веществом 18 с высокой плотностью.
Вариант 2 построения рабочего тела представлен на фиг. 5.
Маховики 16, 17, имеющие форму усеченной сферы, жестко закреплены на верхней оси вращения 7 (и нижней оси вращения 8) симметрично относительно центра шарнирного соединения места излома оси вращения, и заключены внутрь сферы, образованной двумя соединенными между собой полусферами 19, 20 с центрирующим кольцом 21 между ними, которое обжимается двумя кольцами 22, закрепленными на оси вращения с возможностью их продольного перемещения от усилия прижимных пружин 23.
Пространство, образованное между маховиками 15, 16 и полусферами 19, 20, заполняется рабочим текучим веществом 18 с высокой плотностью.
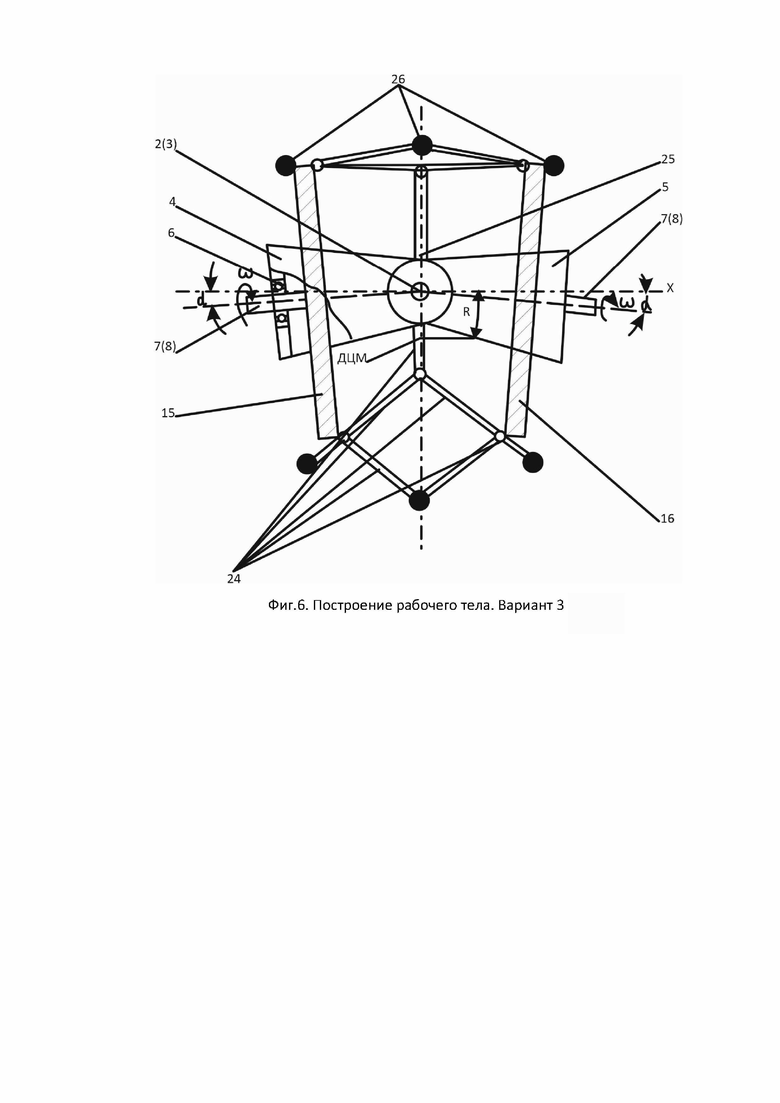
Вариант 3 построения рабочего тела представлен на фиг. 6.
Маховики 15, 16 жестко закреплены на верхней оси вращения 7 (и нижней оси вращения 8) симметрично относительно центра шарнирного соединения места излома оси вращения.
По внешнему периметру через равные расстояния диаметрально-симметрично маховики 15, 16 связываются между собой шарнирными сочленениями типа трапеции 24, по внутреннему диаметру соединенные между собой шарнирным соединением через кольцо 25 в обязательном порядке, а на внешнем радиусе, шарнирными сочленениями типа трапеции 24 оснащены утяжелителями 26 для достижения максимально возможного значения создаваемого значения дисбаланса.
Таким образом, технический результат изобретения - способ создания регулируемой величины динамического центра массы, приводящий к появлению управляемой линейной тяги, который достигается путем управляемого регулирования углом излома осей вращения, снабженных рабочим телом, в виде сильфона - достигается за счет того, что заявленный способ можно использовать:
1. В качестве замены трансмиссионного узла любого наземного транспортного средства, причем передача тяги на опорные элементы (колеса, лыжи, полозья и т.п.) не требуется.
2. В качестве замены движителей (водометов, гребных винтов), использующих в качестве опоры среду, в которой или по которой они передвигаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| ТОРОИДАЛЬНЫЙ ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108267C1 |
| ОБЪЕДИНЕННЫЙ ОПОРНЫЙ ПОДУЗЕЛ УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2113378C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2260535C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПОЗВОНОЧНИКА | 1994 |
|
RU2071750C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ | 2008 |
|
RU2392130C2 |

Изобретение относится к устройству и способу регулирования величины динамического центра массы. В устройстве устанавливаются верхнее рабочее тело и нижнее рабочее тело, которые должны вращаться синхронно благодаря шестеренчатым колесам в противоположных направлениях для того, чтобы нейтрализовать вращательный момент. Через верхнюю поворотную скобу и нижнюю поворотную скобу проходят две оси: верхняя ось вращения и нижняя ось вращения, которые имеют возможность перегибаться. Оси должны быть установлены таким образом, чтобы ось их изгиба проходила точно по плоскости симметрии, проходящей через верхнюю поворотную ось и нижнюю поворотную ось. На данные оси вращения, симметрично месту изгиба, устанавливаются верхнее рабочее тело и нижнее рабочее тело. Верхнее рабочее тело и нижнее рабочее тело состоят каждое из двух маховиков, жестко закрепленных на верхней оси вращения и нижней оси вращения и соединенных между собой устройством, обеспечивающим перераспределение массы внутри рабочих тел при их деформации, возникающей при повороте внешней поворотной скобы и внутренней поворотной скобы на угол α. Достигается создание управляемой линейной тяги. 2 н. и 7 з.п. ф-лы, 6 ил.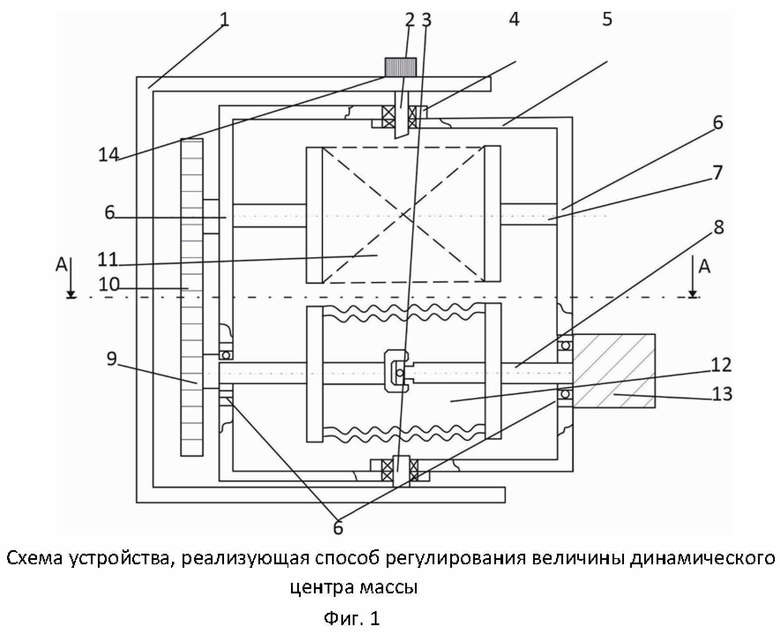
1. Способ создания регулируемой величины динамического центра массы, характеризующийся тем, что двигатель создает вращение осей, система шестеренчатых колес передает вращение с одной оси на другую, внешняя и внутренняя скобы сгибают оси вращения, одновременное встречное сложение внешней и внутренней скобы приводит к возникновению управляемой линейной тяги.
2. Способ по п. 1, характеризующийся тем, что скорость линейного перемещения определяется скоростью вращения рабочих тел, закрепленных на осях вращения.
3. Способ по п. 1, характеризующийся тем, что скорость и направление линейного перемещения пропорциональна углу сгибания осей вращения, задаваемой углом α поворота скоб.
4. Устройство для создания регулируемой величины динамического центра массы, содержащее корпус, внутри которого размещаются поворотные скобы, на которых смонтированы оси вращения с карданными сочленениями по центру, находящиеся внутри рабочих тел, на выходе осей вращения из внешней скобы монтируются шестеренчатые колеса для передачи вращения с одной оси на другую, при сложении скоб возникает управляемая линейная тяга.
5. Устройство по п. 4, отличающееся тем, что вращательное движение рабочих тел обеспечивает двигатель, входящий в состав устройства.
6. Устройство по п. 4, отличающееся тем, что управление углом поворота скоб осуществляет сервопривод.
7. Устройство по п. 4, отличающееся тем, что внешняя и внутренняя скобы скрепляются между собой на поворотной оси установки, плечи скоб в точке скрепления должны быть равны.
8. Устройство по п. 4, отличающееся тем, что внутренняя часть рабочего тела содержит перемещаемую по объему тела массу.
9. Устройство по п. 4, отличающееся тем, что вещество рабочего тела должно иметь высокую плотность.
| Многолопастный судовой винт | 1929 |
|
SU19477A1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ БОГДАНОВА | 2013 |
|
RU2520776C1 |
| JP 2008309054 A, 25.12.2008 | |||
| СПОСОБ СОЗДАНИЯ ТЯГИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СРЕДСТВО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2448023C2 |

