Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферическом шарикоподшипниковом подвесе (СШПП), которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов.
Известен гироскоп [1], наиболее близкий по техническому решению к предлагаемому изобретению, принятый за прототип, содержащий корпус с герметично закрывающейся крышкой, гиромотор с ротором на СШПП, датчики угла (ДУ), размещенные по периметру торца ротора, что позволяет осуществлять измерения углов отклонения ротора, а также управление им в двух взаимно перпендикулярных плоскостях. Статорные части ДУ и датчиков момента (ДМ) расположены на одной плате, а общим ротором этих датчиков является ферритовое кольцо, закрепленное в торцевой части маховика. В гироскопе в качестве привода использован электрический гистерезисный двигатель обращенного типа на переменном токе. Роторный пакет двигателя размещен на роторе гироскопа, а статор двигателя с уложенными в него обмотками на его корпусе. Маховик гироскопа установлен во внутреннее кольцо СШПП, который обеспечивает три степени свободы маховика, допуская неограниченный угол поворота вокруг собственной оси вращения (оси X) и ограниченные углы (±30') поворота вокруг двух других осей (Y и Z). Маховик приводится во вращение гиродвигателем, статор которого установлен на наружном кольце СШПП, а ротор закреплен на маховике. Радиальный шарикоподшипник выполняет роль упора и служит для ограничения углов поворота маховика вокруг осей Y и Z. В гироскопе разгон ротора осуществляется за счет моментов сил трения в зоне контакта шариков с опорными элементами. Для регистрации углов поворота маховика относительно платы, вокруг измерительных осей Y и Z предназначены ДУ гироскопа.
Основными достоинствами прототипа являются жестко закрепленные ферритовые кольца в торцевой части ротора прямоугольного сечения, выполняющего роль подвижного элемента датчиков угла и момента, которые размещены на корпусе гироскопа напротив ферритового кольца, что существенно повышает точность гироскопа за счет устранения помех в полезном сигнале, создаваемых работой гиродвигателя, и расширяет диапазон измеряемых угловых скоростей за счет увеличения плеча «датчик момента - подвижный элемент».
Недостатком вышеуказанного гироскопа является:
- электромагнитное взаимовлияние ДМ на индукционные ДУ, что приводит к возрастанию шумовой составляющей в выходном сигнале при управлении прецессией;
- неортогональное расположение ДМ относительно измерительных осей, что приводит к межканальному взаимовлиянию по измерительным осям при воздействии на гироскоп угловой скорости вращения по одному из каналов, которое растет при увеличении скорости;
- недостаточная скорость управления прецессией для применения в перспективных информационно-измерительных системах.
Данные недостатки усложняют или делают невозможным использование данного гироскопа на СШПП в перспективных информационно-измерительных и управляющих системах стабилизации и управления подвижных объектов.
Задачей, на решение которой направлено изобретение, является усовершенствование конструкции гироскопа на СШПП, в которой минимизировано взаимовлияние между каналами и устранено воздействие управляющих сигналов датчиков момента на выходные сигналы датчиков угла, уменьшена шумовая составляющая выходного сигнала, а также увеличена скорость управления прецессией.
Поставленная задача для гироскопа на СШПП решается:
- использованием индивидуального магнитопровода для датчиков угла и датчиков момента;
- ортогональным расположением датчиков момента относительно измерительных осей;
- увеличением количества датчиков момента до 8 шт.
К существенным отличиям предложенного гироскопа по сравнению с известным можно отнести особую конструкцию гироприбора, в котором датчики момента и датчики угла находятся по разные стороны ротора гироскопа для исключения электромагнитного взаимовлияния ДМ на ДУ, количество ДМ увеличено до 8 шт., где основные статорные части ДМ в количестве 4 шт.располагаются под 90° относительно измерительных осей вокруг продольной оси гироскопа (для исключения взаимовлияния между каналами), остальные (дополнительные) 4 шт. расположены вокруг продольной оси гироскопа через 45° относительно измерительных осей (для увеличения скорости управления прецессией). Данное отличие позволяет существенно снизить взаимовлияние между каналами и шумовую составляющую выходного сигнала, а также увеличить скорость управления прецессией гироскопа в сравнении с прототипом.
Изобретение поясняется чертежами.
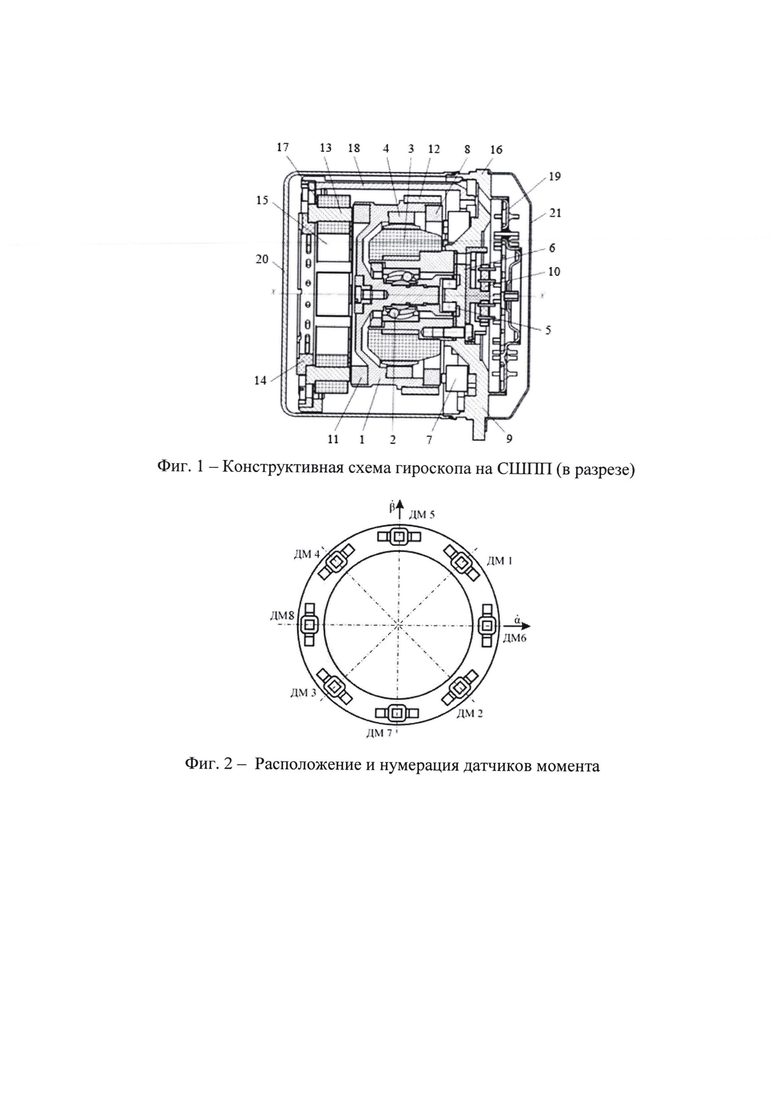
На фиг. 1 представлена конструктивная схема гироскопа на СШПП в разрезе; на фиг. 2 - расположение и нумерация датчиков момента.
Маховик 1 гироскопа установлен во внутреннее кольцо СШПП 2. СШПП обеспечивает три степени свободы маховика, допуская неограниченный угол поворота вокруг собственной оси вращения (оси X) и ограниченные углы (±30') поворота вокруг двух других осей (Y и Z). Маховик приводится во вращение гиродвигателем, статор 3 которого установлен на наружном кольце СШПП, а ротор 4 закреплен на маховике. Радиальный шарикоподшипник 5 выполняет роль упора и служит для ограничения углов поворота маховика вокруг осей Y и Z. Для регистрации углов поворота маховика относительно платы 6, вокруг измерительных осей Y и Z предназначены ДУ гироскопа. Статорные части датчиков угла 7 гироскопа расположены на плате, а общим ротором этих датчиков является ферритовое кольцо 8, закрепленное в торцевой части маховика. Основание представляет собой узел, состоящий из платы 6, на которую установлены катушки датчиков момента (8 шт.). Плата 6, в свою очередь, тоже представляет собой узел, состоящий из фланца 9, на котором под углом 45 градусов к осям координат размещены четыре сердечника 2-х датчиков угла. Также на фланце 9 размещена колодка 10, через которую выводятся проводники. В целях обеспечения поворота маховика в пространстве предназначены ДМ гироскопа. Для образования магнитной цепи датчиков момента на роторе 4 гироскопа было установлено второе ферритовое кольцо 11. Ротор 4 гироприбора представляет собой сборочную единицу, состоящую из маховой массы 1, на которой с двух сторон установлены ферритовые кольца и балансировочное кольцо 12.
ДМ находятся на противоположной, относительно датчиков угла, стороне ротора и установлены на плате 9, представляющей собой единый магнитопровод 13, на котором с шагом 45° расположены 8 шт. катушек датчиков момента. Начала и концы этих катушек подпаиваются к ламелям на колодке 14, также находящейся на магнитопроводе. Исходя из расположения катушек датчиков момента для создания момента относительно одной из осей чувствительности гироскопа необходимо подавать управляющие напряжения на один датчик, расположенный под 90° относительно соответствующей измерительной оси. При отклонении ротора свыше 15' от нейтрального положения, напряжение подается еще на два соседних датчика момента, находящихся под углом 45° относительно первого.
Плата 15 посредством винтов закреплена на стакане 18, который, в свою очередь, закреплен на плате 16. Требуемый зазор между выступами магнитопровода и ферритом, установленном в роторе 4, обеспечивается подбором прокладок 17. От ламелей платы 15 проводники идут по каналам на стакане 18 и, проходя в отверстиях платы 16, подсоединяются к крышке 19. Герметичность прибора и защита проводников и контактов от механических повреждений обеспечиваются соответственно кожухом 20 и экраном 21. Гироскоп выполнен герметичным и заполнен смесью газов (водород - 95% и гелий - 5%) до давления 750 мм рт.ст. в целях снижения аэродинамического момента сопротивления и его влияния на дрейф гироскопа.
Гироскоп работает в двух основных режимах:
- свободного гироскопа с углами прокачки не более ±30';
- удержания ротора (арретирования), при этом гироскоп работает как датчик угловой скорости с электрической пружиной в обратной связи.
Эти режимы работы гироскопа обусловлены режимами работы гиростабилизатора:
- стабилизация - удержание заданного направления при эволюциях основания;
- управление через гироскоп - изменение угловой ориентации оборудования совместно с режимом стабилизации или без него;
- быстрая смена угловой ориентации (переброс) - подача управляющего сигнала непосредственно на двигатели стабилизации.
В первых двух режимах работы гиростабилизатора гироскоп является свободным гироскопом, скоростью прецессии которого можно управлять амплитудой напряжения, приложенного к катушкам электромагнитных датчиков момента. При перебросе гиростабилизатора гироскоп используется в режиме арретирования.
Модель динамики гироскопа с учетом взаимовлияния каналов датчиков момента и углов имеет вид:
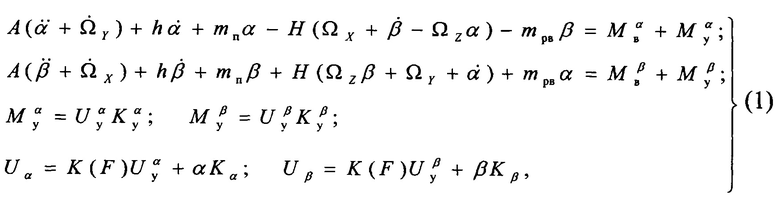
где А - экваториальный момент инерции ротора, h - коэффициент демпфирования, mп - перекрестный момент; mрв - радиально-восстанавливающий момент;  - управляющие моменты по соответствующим координатам;
- управляющие моменты по соответствующим координатам;  - возмущающие моменты по соответствующим координатам;
- возмущающие моменты по соответствующим координатам;  - напряжения управления по соответствующим координатам;
- напряжения управления по соответствующим координатам;  - коэффициенты передачи датчиков моментов; Uα, Uβ - напряжения на выходе датчиков угла; K(F) - коэффициент взаимовлияния цепей датчика момента гироскопа на цепь датчика угла; Kα, Kβ - коэффициенты передачи датчиков угла, F - частота управляющего сигнала; α, β - текущие углы отклонения ротора по измерительным осям; ΩY,ΩX,ΩZ - угловая скорость основания гироскопа по соответствующим координатам.
- коэффициенты передачи датчиков моментов; Uα, Uβ - напряжения на выходе датчиков угла; K(F) - коэффициент взаимовлияния цепей датчика момента гироскопа на цепь датчика угла; Kα, Kβ - коэффициенты передачи датчиков угла, F - частота управляющего сигнала; α, β - текущие углы отклонения ротора по измерительным осям; ΩY,ΩX,ΩZ - угловая скорость основания гироскопа по соответствующим координатам.
Как следует из уравнений (1), радиально-восстанавливающий момент приводит к прецессии гироскопа в направлении уменьшения углов α и β, а перекрестный - к их увеличению. При подаче управляющих напряжений на датчики моментов на выходе датчиков углов появляются помехи (шум)  и
и  , которые при включении гироскопа в контур системы управления платформой приводят к ошибкам стабилизации, зависящим от коэффициента взаимовлияния. Уменьшение коэффициента взаимовлияния приведет к уменьшению шумовой составляющей сигналов датчиков углов и, следовательно, к увеличению точности стабилизации [2].
, которые при включении гироскопа в контур системы управления платформой приводят к ошибкам стабилизации, зависящим от коэффициента взаимовлияния. Уменьшение коэффициента взаимовлияния приведет к уменьшению шумовой составляющей сигналов датчиков углов и, следовательно, к увеличению точности стабилизации [2].
Таким образом, в сравнении с прототипом, предлагаемое изобретение обеспечивает существенно низкий уровень шумовой составляющей в выходном сигнале датчиков угла, а также минимизирует электромагнитное взаимовлияние и взаимовлияние каналов при воздействии угловой скорости (практически отсутствует). Данное усовершенствование достигнуто при помощи разнесения ДМ от ДУ и перпендикулярному расположению ДМ относительно ДУ, а также менее плотному монтажу проводов от ДУ и удалению их от проводов ДМ в результате освободившегося для этого пространства.
Данные улучшения удалось выполнить при несущественных увеличениях высоты и массы гироприбора (в основном ротора). Последнее положительно сказалось на увеличении кинетического момента и, как следствие, на снижении дрейфа благодаря изменению конструкции ротора и прибора вцелом.
Использованные источники:
1. Патент РФ №2460040, МПК G01C 19/02, 2011 г.
2. Распопов В.Я. Гироскопический датчик углов со сферическим шарикоподшипниковым подвесом / В.Я. Распопов, Д.М. Малютин, Р.В. Алалуев, С.В. Телухин, С.И. Шепилов // Гироскопия и навигация. - 2018. -№2 (101). - С. 88-94.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферическом шарикоподшипниковом подвесе, которые могут применяться в качестве чувствительных элементов гиростабилизаторов. Использование индивидуального магнитопровода для датчиков угла и датчиков момента, ортогональное расположение датчиков момента относительно датчиков угла, увеличение количества датчиков момента вдвое и расположение их относительно датчиков угла по разные стороны ротора гироскопа позволило устранить воздействие управляющих сигналов датчиков момента на выходные сигналы датчиков угла, уменьшить шумовую составляющую выходного сигнала, взаимовлияние между каналами, а также увеличить скорость управления прецессией. 2 з.п. ф-лы, 2 ил.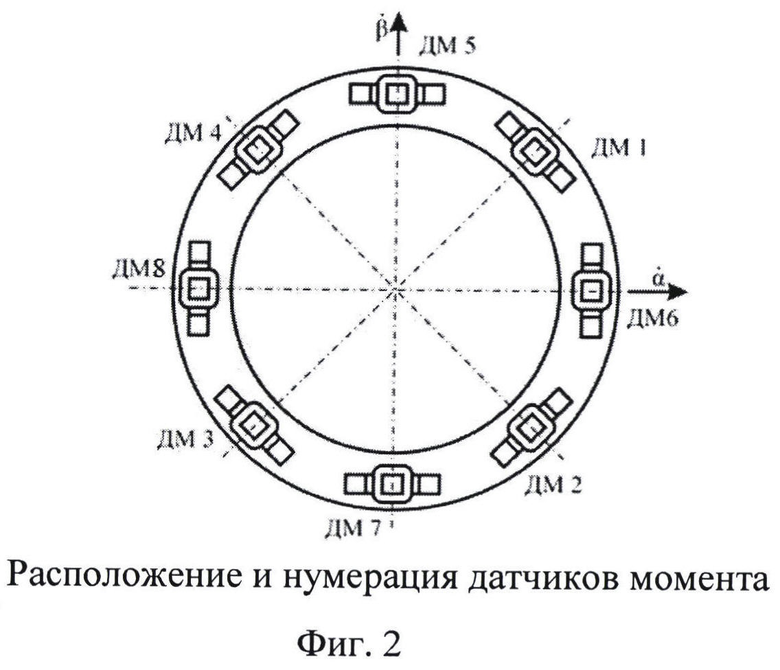
1. Гироскоп, содержащий корпус, в котором установлен гиромотор, включающий статор с катушками и ротор на сферическом шарикоподшипниковом подвесе, а также взаимоиндуктивные датчики угла и датчики момента, отличающийся тем, что датчики угла и датчики момента находятся по разные стороны ротора гироскопа, при этом количество датчиков момента увеличено до 8 шт., где основные статорные части датчиков момента в количестве 4 шт. располагаются под 90° относительно измерительных осей вокруг продольной оси гироскопа, а дополнительные 4 шт. расположены вокруг продольной оси гироскопа через 45° относительно измерительных осей.
2. Гироскоп по п. 1, отличающийся тем, что датчики угла и датчики момента используют индивидуальный магнитопровод.
3. Гироскоп по п. 1, отличающийся тем, что датчики момента расположены ортогонально относительно измерительных осей.
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| CN 207529336 U, 22.06.2018 | |||
| WO 1992011904 A1, 23.07.1992. | |||

