ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к использованию железнодорожного транспортного средства для обследования железнодорожного пути или для работы на железнодорожном пути, в частности, для его строительства, содержания, технического обслуживания, ремонта, обновления или демонтажа. Оно также относится к раннему определению местоположений точек интереса на железнодорожном пути, при необходимости определяющих границы зон интереса для последующего вмешательства на пути приспособления для вмешательства, переносимого и маневрируемого машиной, движущейся по указанному пути. Оно также относится к преобразованию такого местоположения для последующего его использования, в частности, для последующего обследования пути посредством устройства для обследования или для последующего вмешательства на пути посредством приспособления для вмешательства.
УРОВЕНЬ ТЕХНИКИ
[0002] В документе US 4986189 описана машина для вмешательства для технического обслуживания или ремонта железнодорожного пути, которая содержит приспособления для вмешательства, предназначенные для работы в то время, когда эта машина продвигается вперед при движении по железнодорожному пути в направлении продвижения этих работ. Для того, чтобы предвидеть наличие препятствий и обеспечить возможность автоматического управления позиционированием указанных приспособлений, на передней части машины расположена измерительная штанга. Эта измерительная штанга расположена горизонтально и перпендикулярно к направлению пути, а также содержит выровненные датчики, обеспечивающие возможность обнаружения поперечного положения рельса. Другой датчик, состоящий из камеры, отслеживает препятствия на пути. Измерительная штанга дополнительно оборудована одометром. Сигналы датчиков передают в схему для управления приспособлениями с задержкой, которая находится в зависимости от сигнала одометра и заранее определенного расстояния между измерительной штангой и приспособлениями. Таким образом, можно расположить измерительную штангу на расстоянии от приспособлений без риска помех. Но такой режим работы предполагает, что заранее определенное расстояние между измерительной штангой и приспособлениями известно с высокой точностью. Поскольку требуемая точность позиционирования приспособлений является сантиметровой, для создания общей системы отсчета необходимо обеспечивать чрезвычайно жесткое общее шасси для опоры приспособлений для вмешательства и измерительной штанги. Это также предполагает, что перпендикулярность измерительной штанги относительно пути является точной. Кроме того, одометрические погрешности, связанные, например, со скольжением или с угловой надписью колеса щупа относительно нейтральной линии рельса, являются кумулятивными. Наконец, эта система не справляется с изогнутыми путями.
[0003] В документе «Высокопроизводительная система инспектирования и технического обслуживания пути с использованием непрерывного сканированного изображения» Масато Укаи и Нобухико Нагахара 11-го Всемирного конгресса по железнодорожным исследованиям, 2016 г. (“A High-Performance Inspection and Maintenance System of Track using Continuous Scan Image” by Masato Ukai and Nobuhiko Nagahara, 11th WCRR 2016), описана система раннего анализа железнодорожного пути с целью последующего вмешательства посредством транспортного средства технического обслуживания. Эта аналитическая система смонтирована на специализированном железнодорожном транспортном средстве, которое может перемещаться по пути с максимальной скоростью 45 км/ч. Система анализа использует линейную камеру, расположенную на этом транспортном средстве поперек пути, соединенную с одометром таким образом, чтобы синхронизировать импульсы одометра с линейными снимками, выполненными линейной камерой. Эта система обеспечивает возможность построения непрерывного растрового (двумерного) изображения железнодорожного пути. Анализ растрового изображения, который не выполняют в режиме реального времени, обеспечивает возможность обнаружения объектов, имеющих заранее определенную характерную особенность, и, в частности, препятствий, для определения зон пути, где возможно вмешательство, и «запрещенных» зон, где автоматическое вмешательство невозможно. Для исправления ошибок измерения одометра, особенно в кривых, предложено регулярно повторно настраивать сигнал одометра посредством распознавания заранее определенных маркеров, расположенных на пути, абсолютное положение которых известно. Система анализа обеспечивает возможность создания программы вмешательства, которая может быть выполнена позже посредством машинного приспособления для технического обслуживания, переносимого транспортным средством технического обслуживания, движущимся по железнодорожному пути. Но последующее использование измерений транспортным средством технического обслуживания требует от последнего наличия собственных средств позиционирования относительно пути. Кроме того, не учитываются потенциальные дефекты, связанные с перпендикулярностью между линейной камерой и путем.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] В частности, настоящее изобретение направлено на преодоление недостатков предшествующего уровня техники и на предложение средств, обеспечивающих точное раннее определение местоположений точек или линий интереса на железнодорожном пути, при необходимости определяющих границы зон интереса для последующего вмешательства приспособления, переносимого и управляемого машиной для вмешательства, движущейся по указанному пути.
[0005] Для этой цели в соответствии с первым аспектом настоящего изобретения предложен способ определения местоположения железнодорожного пути, выполняемый посредством системы определения местоположения железнодорожного пути, содержащей по меньшей мере одну линейную камеру, направленную на железнодорожный путь, и один или более одометров, причем система определения местоположения железнодорожного пути выполнена с возможностью продвижения по железнодорожному пути в направлении продвижения, а способ определения местоположения включает следующие действия:
- неоднократный сбор с помощью указанного одометра (одометров) данных продвижения системы определения местоположения железнодорожного пути на железнодорожном пути в направлении продвижения,
- неоднократный сбор с помощью линейной камеры, направленной на железнодорожный путь, мгновенных линейных оптических данных вдоль линии мгновенного измерения,
- посредством обработки по меньшей мере мгновенных линейных оптических данных и, при необходимости, данных продвижения, построение растрового изображения зоны поверхности железнодорожного пути,
- посредством обработки построенного растрового изображения идентификацию в построенном растровом изображении по меньшей мере одного пространственного индексирующего маркера заранее определенной характерной особенности и посредством обработки по меньшей мере данных продвижения определение криволинейной абсциссы пространственного индексирующего маркера и положения указанного пространственного индексирующего маркера относительно опорной линии железнодорожного пути, и
- идентификация точек или линий интереса в построенном растровом изображении и определение в двумерной системе отсчета определения местоположения, связанной с пространственным индексирующим маркером и с указанной опорной линией, координат указанных точек или линий интереса.
[0006] Линейная камера обладает тем преимуществом, что она в высокой степени нечувствительна к паразитным перемещениям, в частности, к вибрациям, возникающим в результате продвижения на железнодорожном пути системы определения местоположения, что может быть дополнительно усилено в том случае, когда система определения местоположения прикреплена к машине для вмешательства на железнодорожном пути или сцеплена с ней. Кроме того, по сравнению с матричными технологиями время формирования пикселя линейного изображения меньше. Таким образом, уменьшаются задержка и неточность позиционирования, которые могут быть вызваны длительной экспозицией и слишком долгим временем формирования.
[0007] Благодаря тому, что в качестве локальной системы отсчета для определения координат точек или линий интереса принимают пространственный индексирующий маркер и опорную линию, конструируют набор данных, который впоследствии может быть использован самой системой преобразования, оборудованной с возможностью идентификации пространственного индексирующего маркера и опорной линии.
[0008] Линейные оптические данные, собранные в данный момент, соответствуют линии растрового изображения. Построение растрового изображения на основе линейных оптических данных является простым, поскольку не возникает проблемы перекрытия между последовательными изображениями, которое было бы свойственно для сбора данных посредством матричной камеры. Кривые также «естественно» выпрямляются в растровом изображении, построенном на основе мгновенных линейных данных линейной камеры, что обеспечивает упрощенное, но тем не менее релевантное представление для оператора.
[0009] В соответствии с вариантом осуществления сбор мгновенных линейных оптических данных запускают посредством приема данных продвижения.
[0010] Если пространственное разрешение одометра высокое, можно запускать линию сбора линейных оптических данных для каждого импульса одометра или даже для всех N импульсов, причем N представляет собой любое ненулевое целое число, которое обеспечивает возможность наличия постоянного пространственного шага для последовательных сборов линий линейных оптических данных.
[0011] В соответствии с вариантом осуществления мгновенные линейные оптические данные и данные продвижения собирают синхронизированным образом.
[0012] В частности, если пространственное разрешение одометра ниже разрешения, требуемого для построения растрового изображения, можно, например, наблюдать временной интервал T между двумя последовательными импульсами I-1 и I одометра, делить этот временной интервал на заранее определенное ненулевое целое число N и запускать линии сбора линейных оптических данных с постоянным временным интервалом T/N между импульсом I и импульсом I+1 одометра. Количество линий измерения подсчитывают до импульса I+1, и из этого апостериорно выводят пространственный шаг для сбора линейных оптических данных в направлении продвижения между импульсами I и I+1. На практике вариации скорости продвижения системы для определения местоположения в масштабе наблюдения невелики, и предположение о постоянной скорости между двумя последовательными импульсами одометра приводит к пренебрежимо малой деформации растрового изображения. В общем, и независимо от поддерживаемого алгоритма, можно запускать линейную камеру, например, посредством электронной карты для генерации последовательностей импульсов или специального программного блока.
[0013] В соответствии с вариантом осуществления данные продвижения и мгновенные линейные оптические данные имеют временные метки, причем растровое изображение предпочтительно выстраивают в зависимости от временных меток. Таким образом, можно определить пространственный шаг, потенциально переменный, между двумя последовательными линиями линейных оптических данных, на основе знания пространственного разрешения одометра и временных интервалов, наблюдаемых между двумя импульсами одометра и между двумя линиями измерения линейной камеры.
[0014] В соответствии с вариантом осуществления точки или линии интереса составляют границы зоны интереса, предпочтительно, представляют собой вершины четырехугольника, составляющего зону интереса. Предпочтительно, система определения местоположения выполнена с возможностью идентификации в растровом изображении пересечений между путевыми шпалами или нейтральными линиями путевых шпал, с одной стороны, и рельсами железнодорожного пути или нейтральными линиями рельсов, с другой стороны, причем эти пересечения составляют по меньшей мере некоторые из точек или линий интереса.
[0015] Координаты точек интереса могут представлять собой декартовы координаты в системе отсчета, принимающей в качестве начала отсчета пространственный индексирующий маркер, в качестве оси Х - опорную линию, и в качестве оси Y - ось, перпендикулярную к этой опорной линии. В этом предположении координаты содержат расстояние относительно опорной линии, измеряемое перпендикулярно к этой опорной линии, и расстояние относительно пространственного индексирующего маркера, измеряемое параллельно этой опорной линии.
[0016] Опорная линия может быть локально определена посредством данных по меньшей мере двух точек или данных точки и направляющего вектора или любых других эквивалентных средств. В соответствии с вариантом осуществления опорная линия представляет собой нейтральную линию одного из рельсов железнодорожного пути или линию, построенную на основе нейтральных линий рельсов железнодорожного пути, например срединную линию между двумя рельсами железной дороги. На практике можно определить нейтральную линию рельса, например, посредством определения местоположений краев этого рельса на растровом изображении, построенном на основе мгновенных линейных данных. Также можно прибегнуть к матричной камере ориентации, как будет описано ниже.
[0017] Предпочтительно, устройство ориентации системы определения местоположения железнодорожного пути неоднократно определяет данные угловой ориентации этой системы определения местоположения железнодорожного пути относительно опорной линии, причем координаты точек или линий интереса определяют в зависимости от указанных данных ориентации. Знание угла между линейной камерой и опорной линией в плоскости проекции растрового изображения обеспечивает возможность исправления координат точек интереса и пространственного индексирующего маркера. Разумеется, при наличии непрямого угла между линейной камерой и опорной линией расстояние, видимое линейной камерой между точкой интереса и рельсом, больше фактического расстояния, измеренного перпендикулярно к опорной линии. Естественно, расстояние между двумя соседними пикселями линейной камеры известно и задано параметрами калибровки.
[0018] В соответствии с вариантом осуществления устройство ориентации системы определения местоположения содержит по меньшей мере один первый щуп для обнаружения ориентации системы определения местоположения относительно первого рельса железнодорожного пути, составляющего первый рельс ориентации, и, предпочтительно, содержит второй щуп для обнаружения ориентации системы определения местоположения относительно второго рельса железнодорожного пути, составляющего второй рельс ориентации.
[0019] В соответствии с другим вариантом осуществления устройство ориентации системы определения местоположения содержит по меньшей мере одну первую матричную камеру ориентации, расположенную обращенной к первому из рельсов железнодорожного пути, составляющему первый рельс ориентации, причем устройство ориентации делает снимки с помощью первой матричной камеры ориентации и обрабатывает указанные снимки таким образом, чтобы обнаруживать на них ориентацию первого рельса ориентации относительно цели первой матричной камеры ориентации, и, предпочтительно, содержит вторую матричную камеру ориентации, расположенную обращенной ко второму из рельсов железнодорожного пути, составляющему второй рельс ориентации, причем устройство ориентации делает снимки с помощью второй матричной камеры ориентации и обрабатывает указанные снимки таким образом, чтобы обнаруживать ориентацию второго рельса ориентации относительно цели второй матричной камеры ориентации. Снимки линейной камеры (камер) ориентации также могут обеспечивать возможность определения опорной линии. Доступны различные опции для приближения и согласования данных, поступающих от линейной камеры и камеры (камер) ориентации. В соответствии с первым способом можно выполнять калибровку системы определения местоположения железнодорожного пути таким образом, чтобы характеризовать посредством параметров калибровки относительное положение линейной камеры и устройства ориентации, состоящего из камеры (камер) ориентации. На основе этих данных калибровки становится возможным преобразование на растровом изображении, построенном на основе мгновенных линейных оптических данных, направляющей линии рельса, обнаруженной в изображении камеры ориентации. Этот первый способ может быть реализован без обнаружения нейтральной линии рельса, или, в частности, опорной линии, на растровом изображении, построенном на основе мгновенных линейных оптических данных. Напротив, можно использовать только данные угловой ориентации, предоставляемые устройством ориентации, причем опорную линию рассчитывают только на основе данных растрового изображения, построенного на основе мгновенных линейных данных.
[0020] При необходимости, исправления могут быть выполнены посредством инерциальных измерений, выполненных в средней точке штанги, или посредством технологий измерения оптической скорости (которые подразумевают получение близко расположенных матричных изображений с помощью камеры ориентации). Эти подходы также могут быть использованы для выбора подходящего изображения (с низкой конкретной вращательной динамикой) для определения среднего угла надписи штанги относительно рельса.
[0021] При необходимости на одном и том же рельсе или на двух различных рельсах можно сочетать камеру и щуп. Таким образом, для оценки ориентации линейной камеры можно выполнять интерполяцию между данными ориентации, передаваемыми двумя матричными камерами ориентации. Наличие по меньшей мере одного датчика (щупа или матричной камеры) над каждым рельсом железнодорожного пути также обеспечивает возможность компенсации отсутствия рельса на участке пути, в частности, когда система определения местоположения продвигается вдоль путевого устройства, например, стрелки. Также можно выбирать конкретную ориентацию рельса в кривых, например, рельс, расположенный внутри этой кривой.
[0022] Предпочтительно, данные ориентации имеют временные метки.
[0023] В соответствии с вариантом осуществления система определения местоположения различает зоны поверхности железнодорожного пути, содержащие шпалы, и зоны между шпалами поверхности пути, причем устройство ориентации передает данные ориентации только один раз для каждой из этих зон между шпалами. Вариации ориентации между двумя шпалами невелики, поэтому лучше ограничивать массу данных, подлежащих обработке.
[0024] Предпочтительно, данные ориентации используют для определения опорной линии.
[0025] Для обеспечения возможности человеческого вмешательства в идентифицированных точках интереса или зонах интереса можно обеспечивать возможность воспроизведения растрового изображения на просмотровом экране системы определения местоположения. Предпочтительно, обеспечивается визуальная идентификация на просмотровом экране точек или линий интереса.
[0026] Можно обеспечивать возможность валидации и/или инвалидации по меньшей мере некоторых из точек или линий интереса или зоны интереса или квалификации зоны интереса в качестве зоны возможного вмешательства или запрещенной зоны после осуществления ввода на человеко-машинном интерфейсе ввода.
[0027] В соответствии с другим аспектом изобретения настоящее изобретение относится к способу позиционирования, выполняемому посредством измерительного узла, содержащего систему определения местоположения и систему преобразования, причем система определения местоположения содержит линейную камеру и одометр, система преобразования содержит одну или более матричных камер преобразования, расположенных на расстоянии от линейной камеры системы определения местоположения в направлении продвижения и за ней, а способ включает: этап определения местоположения, выполняемый системой определения местоположения и реализующий способ определения местоположения, описанный ранее; затем этап преобразования, выполняемый системой преобразования и включающий следующие действия:
- сбор с помощью матричной камеры (камер) преобразования набора из одного или более матричных изображений преобразования в пространственной системе отсчета системы преобразования;
- в зависимости от данных продвижения, собранных посредством одометра, идентификацию в указанном наборе из одного или более матричных изображений преобразования пространственного индексирующего маркера и определение координат указанного пространственного индексирующего маркера и характеристики данных опорной линии в пространственной системе отсчета системы преобразования, и
- вычисление преобразованных координат точек или линий интереса в пространственной системе отсчета системы преобразования в зависимости от координат пространственного индексирующего маркера и характеристики данных опорной линии в пространственной системе отсчета системы преобразования, и координат точек или линий интереса в системе отсчета определения местоположения.
[0028] В соответствии с другим аспектом изобретения настоящее изобретение относится к способу управления машиной для вмешательства, продвигающейся по железнодорожному пути в направлении продвижения и содержащей приспособление для вмешательства, смонтированное на шасси вмешательства, посредством измерительного узла, содержащего систему определения местоположения и систему преобразования, причем система определения местоположения содержит по меньшей мере одну линейную камеру и одометр, система преобразования содержит по меньшей мере одну матричную камеру преобразования, расположенную на расстоянии от линейной камеры системы определения местоположения в направлении продвижения и за ней, матричная камера преобразования выполнена за одно целое с шасси вмешательства приспособления для вмешательства, а способ включает: процедуру позиционирования, такую как описано ранее, и процедуру вмешательства, включающую позиционирование приспособления для вмешательства в зависимости от координат точек или линий интереса в системе отсчета преобразования.
[0029] Приспособления для вмешательства может быть любого типа, например, представляет собой трамбовочное приспособление или забивающее приспособление.
[0030] Способ в соответствии с этим аспектом настоящего изобретения может включать различные варианты осуществления, воспроизводящие характеристики всех вариантов осуществления, описанных в отношении первого аспекта настоящего изобретения или их части.
[0031] В соответствии с другим аспектом изобретения настоящее изобретение относится к железнодорожному транспортному средству, содержащему систему определения местоположения, содержащую линейную камеру и одометр, причем система определения местоположения способна выполнять один из способов, описанных ранее, в одном или другом из его альтернативных вариантов.
[0032] В соответствии с другим аспектом изобретения настоящее изобретение относится к способу определения местоположения железнодорожного пути, выполняемому посредством системы определения местоположения железнодорожного пути, продвигающейся по железнодорожному пути в направлении продвижения, причем способ определения местоположения включает следующие действия:
- неоднократный сбор с помощью линейной камеры системы определения местоположения железнодорожного пути, направленной на железнодорожный путь, мгновенных линейных оптических данных вдоль линии мгновенного измерения,
- неоднократный сбор с помощью устройства ориентации системы определения местоположения железнодорожного пути данных ориентации системы определения местоположения железнодорожного пути относительно опорной линии железнодорожного пути,
- посредством обработки по меньшей мере мгновенных линейных оптических данных построение возможно искаженного растрового изображения зоны поверхности железнодорожного пути,
- идентификация точек или линий интереса в указанном вероятно искаженном растровом изображении, и
- определение исправленных координат точек или линий интереса в зависимости от вероятно искаженных координат точек или линий интереса в системе отсчета вероятно искаженного растрового изображения и данных ориентации.
[0033] Линейная камера обладает тем преимуществом, что она в высокой степени нечувствительна к вибрациям, возникающим в результате продвижения на железнодорожном пути системы определения местоположения, что может быть дополнительно усилено в том случае, когда система определения местоположения прикреплена к машине для вмешательства на железнодорожном пути или сцеплена с ней.
[0034] Мгновенные линейные оптические данные, собранные в данный момент, соответствуют линии растрового изображения. По мере продвижения системы определения местоположения линия мгновенного измерения перемещается относительно железнодорожного пути.
[0035] Знание угла между линейной камерой и опорной линией в плоскости проекции растрового изображения обеспечивает возможность исправления координат точек интереса и пространственного индексирующего маркера. Разумеется, при наличии непрямого угла между линейной камерой и опорной линией расстояние, видимое линейной камерой между точкой интереса и рельсом, больше фактического расстояния, измеренного перпендикулярно к опорной линии.
[0036] В соответствии с вариантом осуществления предусмотрено, что для сбора данных ориентации первый щуп устройства ориентации обнаруживает ориентацию системы определения местоположения относительно первого рельса железнодорожного пути, составляющего первый рельс ориентации, и, предпочтительно, второй щуп устройства ориентации обнаруживает ориентацию системы определения местоположения относительно второго рельса железнодорожного пути, составляющего второй рельс ориентации.
[0037] В соответствии с другим вариантом осуществления предусмотрено, что для сбора данных ориентации первая матричная камера ориентации устройства ориентации, расположенная обращенной к первому из рельсов железнодорожного пути, составляющему первый рельс ориентации, делает снимки, обрабатываемые устройством ориентации для обнаружения на них ориентации первого рельса ориентации относительно цели первой матричной камеры ориентации, и, предпочтительно, вторая матричная камера ориентации, расположенная обращенной ко второму из рельсов железнодорожного пути, составляющему второй рельс ориентации, делает снимки и обрабатывает указанные снимки, обрабатываемые устройством ориентации, для обнаружения ориентации второго рельса ориентации относительно цели второй матричной камеры ориентации.
[0038] При необходимости на одном и том же рельсе или на двух различных рельсах можно сочетать камеру и щуп. Таким образом, для оценки ориентации линейной камеры можно выполнять интерполяцию между данными ориентации, передаваемыми двумя матричными камерами ориентации. Наличие по меньшей мере одного датчика (щупа или матричной камеры) над каждым рельсом железнодорожного пути также обеспечивает возможность компенсации отсутствия рельса на участке пути, в частности, когда система определения местоположения продвигается вдоль путевого устройства, например, стрелки. Также можно выбирать конкретную ориентацию рельса в кривых, например, рельс, расположенный внутри этой кривой.
[0039] Предпочтительно, данные ориентации имеют временные метки.
[0040] В соответствии с вариантом осуществления система определения местоположения обнаруживает зоны поверхности железнодорожного пути, содержащие шпалы, и зоны между шпалами поверхности пути, причем устройство ориентации предоставляет данные ориентации только один раз для каждой из зон между шпалами. Вариации ориентации между двумя шпалами невелики, поэтому лучше ограничивать массу данных, подлежащих обработке.
[0041] Предпочтительно, опорная линия представляет собой нейтральную линию одного из рельсов железнодорожного пути или линию, построенную на основе нейтральных линий рельсов железнодорожного пути. Предпочтительно, данные ориентации используют для построения опорной линии на основе нейтральных линий рельсов железнодорожного пути.
[0042] В соответствии с особенно преимущественным вариантом осуществления один или более одометров системы определения местоположения железнодорожного пути неоднократно собирают данные продвижения системы определения местоположения железнодорожного пути на железнодорожном пути в направлении продвижения.
[0043] В соответствии с первой реализацией этого варианта осуществления сбор мгновенных линейных оптических данных запускают посредством приема данных продвижения.
[0044] Если пространственное разрешение одометра высокое, можно запускать линию сбора линейных оптических данных для каждого импульса одометра или даже для всех N импульсов, причем N представляет собой любое ненулевое целое число, которое обеспечивает возможность наличия постоянного пространственного шага для последовательных сборов линий линейных оптических данных.
[0045] В соответствии с первой реализацией этого варианта осуществления мгновенные линейные оптические данные и данные продвижения собирают синхронизированным образом.
[0046] В частности, если пространственное разрешение одометра ниже разрешения, требуемого для построения растрового изображения, можно наблюдать временной интервал T между двумя последовательными импульсами I-1 и I одометра, делить этот временной интервал на заранее определенное ненулевое целое число N и запускать линии сбора линейных оптических данных с постоянным временным интервалом T/N между импульсом I и импульсом I+1 одометра. Количество линий измерения подсчитывают до импульса I+1, и из этого выводят апостериорный пространственный шаг для сбора линейных оптических данных в направлении продвижения между импульсами I и I+1. На практике вариации скорости продвижения системы для определения местоположения в масштабе наблюдения невелики, и предположение о постоянной скорости между двумя последовательными импульсами одометра приводит к пренебрежимо малой деформации растрового изображения.
[0047] В соответствии с вариантом осуществления данные продвижения и мгновенные линейные оптические данные имеют временные метки, причем растровое изображение предпочтительно выстраивают в зависимости от временных меток. Таким образом, можно определить пространственный шаг, потенциально переменный, между двумя последовательными линиями линейных оптических данных на основе знания пространственного разрешения одометра и временных интервалов, наблюдаемых между двумя импульсами одометра и между двумя линиями измерения линейной камеры.
[0048] В соответствии с особенно преимущественным вариантом осуществления способ определения местоположения заключается в том, что:
- посредством обработки вероятно искаженного растрового изображения на указанном изображении идентифицируют по меньшей мере один пространственный индексирующий маркер заранее определенной характерной особенности,
- посредством обработки данных продвижения и данных ориентации определяют криволинейную абсциссу пространственного индексирующего маркера и положение этого пространственного индексирующего маркера относительно опорной линии железнодорожного пути, и
- исправленные координаты точек или линий интереса определяют в локальной двумерной системе отсчета, связанной с пространственным индексирующим маркером и с опорной линией.
[0049] Благодаря тому, что в качестве локальной системы отсчета для определения координат точек или линий интереса принимают пространственный индексирующий маркер и опорную линию, конструируют набор данных, который впоследствии может быть использован самой системой преобразования, оборудованной с возможностью идентификации пространственного индексирующего маркера и опорной линии.
[0050] В соответствии с вариантом осуществления точки или линии интереса составляют границы зоны интереса, предпочтительно, представляют собой вершины четырехугольника, составляющего зону интереса. Предпочтительно, система определения местоположения выполнена с возможностью идентификации в растровом изображении пересечений между путевыми шпалами или нейтральными линиями путевых шпал, с одной стороны, и рельсами железнодорожного пути или нейтральными линиями рельсов, с другой стороны, при этом эти пересечения составляют по меньшей мере некоторые из точек или линий интереса.
[0051] Координаты точек интереса могут представлять собой декартовы координаты в системе отсчета, принимающей в качестве начала отсчета пространственный индексирующий маркер, в качестве оси Х - опорную линию, и в качестве оси Y - ось, перпендикулярную к опорной линии. В этом предположении координаты содержат расстояние относительно опорной линии, измеряемое перпендикулярно к этой опорной линии, и расстояние относительно пространственного индексирующего маркера, измеряемое параллельно этой опорной линии.
[0052] Для обеспечения возможности человеческого вмешательства в идентифицированных точках интереса или зонах интереса, можно обеспечивать возможность воспроизведения растрового изображения на просмотровом экране системы определения местоположения. Предпочтительно, на просмотровом экране обеспечивается визуальная идентификация точек или линий интереса.
[0053] Можно обеспечивать возможность валидации и/или инвалидации по меньшей мере некоторых из точек или линий интереса или зоны интереса или квалификации зоны интереса в качестве зоны возможного вмешательства или запрещенной зоны после осуществления ввода на человеко-машинном интерфейсе ввода.
[0054] В соответствии с другим аспектом изобретения настоящее изобретение относится к железнодорожному транспортному средству, содержащему систему определения местоположения, содержащую линейную камеру, по меньшей мере одну матричную камеру и, предпочтительно, одометр, причем система определения местоположения выполнена с возможностью осуществления одного из способов, описанных ранее, в соответствии с одной или другой из его альтернатив.
[0055] В соответствии с другим аспектом изобретения настоящее изобретение относится к железнодорожному транспортному средству, содержащему систему определения местоположения, содержащую линейную камеру и одометр, а также устройство ориентации, которое может содержать, в частности, щуп или матричную камеру. Это транспортное средство может быть автономным или может быть прицеплено к транспортному средству для вмешательства, поддерживающему приспособление для вмешательства, или к устройству для обследования пути.
[0056] В соответствии с другим аспектом изобретения настоящее изобретение относится к железнодорожному транспортному средству, оборудованному системой определения местоположения, расположенной в первой части указанного транспортного средства, и системой преобразования, расположенной во второй части указанного транспортного средства, находящейся на расстоянии от первой части в направлении продвижения транспортного средства и за ней, причем система определения местоположения содержит линейную камеру и одометр, а также, возможно, устройство ориентации, которое может содержать, в частности, щуп или матричную камеру, а система преобразования содержит по меньшей мере одну матричную камеру преобразования.
[0057] В соответствии с предпочтительным вариантом осуществления железнодорожное транспортное средство представляет собой машину для строительства или обслуживания железнодорожного пути, которая дополнительно содержит по меньшей мере одно приспособление для вмешательства на железнодорожном пути, расположенное в третьей части транспортного средства, находящейся на расстоянии от второй части в направлении продвижения и за ней.
[0058] Настоящее изобретение также направлено на предложение средств, обеспечивающих возможность определения положения набора из одного или более приспособлений, переносимого железнодорожным транспортным средством, на основе данных, собранных ранее, относящихся, в частности, к положению точек или линий интереса в системе отсчета определения местоположения.
[0059] Для этой цели в соответствии с другим аспектом изобретения предложен способ управления набором из одного или более приспособлений, смонтированных на железнодорожном транспортном средстве для вмешательства, продвигающемся по железнодорожному пути в направлении продвижения, выполняемый посредством системы преобразования, содержащей шасси преобразования, смонтированное на указанном железнодорожном транспортном средстве для вмешательства, и одну или более матричных камер преобразования, прикрепленных к шасси преобразования, причем способ включает следующие действия:
- прием данных, характеризующих криволинейную абсциссу пространственного индексирующего маркера известной характерной особенности и положение пространственного индексирующего маркера относительно опорной линии железнодорожного пути, а также координат точек или линий интереса в двумерной системе отсчета определения местоположения, связанной с пространственным индексирующим маркером и с указанной опорной линией,
- сбор с помощью матричной камеры (камер) преобразования набора из одного или более матричных изображений преобразования в пространственной системе отсчета системы преобразования, закрепленной относительно шасси преобразования;
- сбор с помощью одометра данных продвижения системы преобразования относительно железнодорожного пути,
- идентификацию пространственного индексирующего маркера в указанном наборе из одного или более матричных изображений преобразования в зависимости от данных продвижения и данных криволинейной абсциссы,
- определение характеристики данных пространственного индексирующего маркера и опорной линии в пространственной системе отсчета шасси преобразования,
- вычисление преобразованных координат точек или линий интереса в пространственной системе отсчета системы преобразования в зависимости от характеристики данных маркера пространственной индексации и опорной линии в пространственной системе отсчета системы преобразования, и координат точек или линий интереса в системе отсчета определения местоположения.
[0060] Предпочтительно, шасси преобразования закреплено относительно основного шасси железнодорожного транспортного средства и при необходимости может образовывать только одно целое с этим основным шасси. Предпочтительно, железнодорожное транспортное средство снабжено несколькими ходовыми тележками, которые движутся по железнодорожному пути, в то же время поддерживая основное шасси.
[0061] Координаты точек интереса могут представлять собой декартовы координаты в системе отсчета, принимающей в качестве начала отсчета пространственный индексирующий маркер, в качестве оси Х - опорную линию, и в качестве оси Y - ось, перпендикулярную к опорной линии. В этом предположении координаты содержат расстояние относительно опорной линии, измеряемое перпендикулярно к этой опорной линии, и расстояние относительно пространственного индексирующего маркера, измеряемое параллельно этой опорной линии.
[0062] Предпочтительно, способ дополнительно включает процедуру вмешательства, включающую позиционирование указанного набора из одного или более приспособлений в зависимости от координат точек или линий интереса в системе отсчета преобразования и данных положения указанного набора из одного или более приспособлений относительно шасси преобразования.
[0063] Указанный набор из одного или более приспособлений может быть любого типа, например, трамбовочное приспособление или забивающее приспособление.
[0064] В соответствии с вариантом осуществления указанный набор из одного или более приспособлений выполнен с возможностью перемещения относительно шасси преобразования, причем процедура вмешательства включает сбор данных положения указанного набора из одного или более приспособлений относительно шасси преобразования посредством устройства измерения положения.
[0065] В соответствии с вариантом осуществления, в частности, подходящим для приспособления для вмешательства, процедура вмешательства содержит команду для перемещения указанного набора из одного или более приспособлений относительно шасси преобразования.
[0066] В соответствии с вариантом осуществления точки или линии интереса составляют границы или характеристики зоны интереса, предпочтительно, представляют собой вершины или стороны четырехугольника, составляющего зону интереса. Предпочтительно, прием координат точек или линий интереса в двумерной системе отчета определения местоположения, связанной с пространственным индексирующим маркером и с опорной линией, включает прием данных для квалификации зоны интереса в качестве зоны возможного вмешательства или запрещенной зоны, причем позиционирование указанного набора из одного или более приспособлений выполняют единственным образом, если зона интереса представляет собой зону возможного вмешательства.
[0067] В соответствии с вариантом осуществления опорная линия представляет собой нейтральную линию одного из рельсов железнодорожного пути или линию, построенную на основе нейтральных линий рельсов железнодорожного пути.
[0068] В соответствии с вариантом осуществления определение характеристики данных пространственного индексирующего маркера и опорной линии включает неоднократное определение устройством ориентации системы преобразования данных угловой ориентации системы определения местоположения железнодорожного пути относительно опорной линии.
[0069] В частности, можно обеспечивать, что устройство ориентации системы определения местоположения содержит по меньшей мере один первый щуп для обнаружения ориентации системы определения местоположения относительно первого рельса железнодорожного пути, составляющего первый рельс ориентации, и, предпочтительно, содержит второй щуп для обнаружения ориентации системы определения местоположения относительно второго рельса железнодорожного пути, составляющего второй рельс ориентации.
[0070] Кроме того, можно обеспечивать, что устройство ориентации системы преобразования содержит по меньшей мере одну первую матричную камеру ориентации, расположенную обращенной к первому из рельсов железнодорожного пути, составляющему первый рельс ориентации. Предпочтительно, первая матричная камера ориентации состоит из первой камеры преобразования из числа камеры (камер) преобразования. Устройство ориентации делает снимки с помощью первой матричной камеры ориентации и обрабатывает указанные снимки таким образом, чтобы обнаруживать на них ориентацию первого рельса ориентации относительно цели первой матричной камеры ориентации.
[0071] Предпочтительно, устройство ориентации системы преобразования содержит вторую матричную камеру ориентации, расположенную обращенной ко второму из рельсов железнодорожного пути, составляющему второй рельс ориентации. Предпочтительно, вторая матричная камера ориентации состоит из второй камеры преобразования из числа камеры (камер) преобразования. Устройство ориентации делает снимки с помощью второй матричной камеры ориентации и обрабатывает указанные снимки таким образом, чтобы обнаруживать на них ориентацию второго рельса ориентации относительно цели второй матричной камеры ориентации.
[0072] При необходимости на одном и том же рельсе или на двух различных рельсах можно сочетать камеру и щуп. Таким образом, для оценки ориентации шасси преобразования можно выполнять интерполяцию между данными ориентации, передаваемыми двумя матричными камерами ориентации. Наличие по меньшей мере одного датчика (щупа или матричной камеры) над каждым рельсом железнодорожного пути также обеспечивает возможность компенсации отсутствия рельса на участке пути, в частности, когда система определения местоположения продвигается вдоль путевого устройства, например, стрелки. Также можно выбирать определенную ориентацию рельса в кривых, например, рельс, расположенный внутри кривой.
[0073] В соответствии с другим аспектом изобретения настоящее изобретение относится к железнодорожному транспортному средству для вмешательства, содержащему набор из одного или более приспособлений для вмешательства на железнодорожном пути, а также систему преобразования, содержащую шасси преобразования, поддерживаемое железнодорожным транспортным средством для вмешательства, и одну или более матричных камер преобразования, прикрепленных к шасси преобразования.
[0074] Различные аспекты настоящего изобретения, а также различные варианты осуществления могут быть естественным образом скомбинированы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0075] Другие характеристики и преимущества настоящего изобретения станут понятны при прочтении последующего описания со ссылкой на сопутствующие чертежи, на которых:
- на фиг.1 показан схематический вид сбоку железнодорожной машины для вмешательства, оборудованной системой определения местоположения и системой преобразования, для реализации способа в соответствии с вариантом осуществления изобретения;
- на фиг.2 показан схематический вид сверху некоторых элементов железнодорожной машины для вмешательства по фиг.1;
- на фиг.3 показан схематический вид системы определения местоположения транспортного средства по фиг.1;
- на фиг.4 показан схематический вид системы преобразования транспортного средства по фиг.1;
- на фиг.5 показан схематический вид зоны железнодорожного пути непосредственно в соответствии с системой определения местоположения по фиг.3.
[0076] Для большей наглядности на всех чертежах одинаковые или похожие элементы обозначены одинаковыми ссылочными обозначениями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0077] На фиг.1 и 2 проиллюстрирована железнодорожная машина 1 для вмешательства, состоящая из первого железнодорожного транспортного средства 2 определения местоположения, здесь также имеющего функцию тяги, и второго буксируемого железнодорожного транспортного средства 3 вмешательства. Железнодорожное транспортное средство 2 определения местоположения содержит основное шасси 4, опирающееся на несколько ходовых тележек 5, расположенных на расстоянии друг от друга в продольном направлении железнодорожного транспортного средства 2, тогда как железнодорожное транспортное средство 3 вмешательства представляет собой полуприцеп, основное шасси 6 которого на одном конце шарнирно присоединено к крепежному элементу 7 железнодорожного транспортного средства 2 определения местоположения и на противоположном конце поддерживается посредством ходовой тележки 8. На главном шасси 6 железнодорожного транспортного средства 3 вмешательства смонтирована транспортная тележка 9, которая движется по пути посредством ходовых тележек 10 и поддерживает набор из одного или более приспособлений 11 для вмешательства. Набор из одного или более исполнительных механизмов (не показан) обеспечивает возможность перемещения транспортной тележки 9 относительно основного шасси 6 параллельно продольному направлению основного шасси 6. Железнодорожная машина 1 для вмешательства оборудована системой 12 определения местоположения, расположенной в железнодорожном транспортном средстве 2 определения местоположения, и системой 16 преобразования, расположенной на транспортной тележке 9 железнодорожного транспортного средства 3 вмешательства на расстоянии от системы определения местоположения в направлении 100 продвижения машины 1 для вмешательства и за ней, причем набор из одного или более приспособлений 11 для вмешательства на железнодорожном пути 22 расположен на транспортной тележке 9 железнодорожной машины 3 вмешательства на расстоянии от системы 16 преобразования в направлении 100 продвижения и за ней.
[0078] Система 12 определения местоположения содержит линейную камеру 26 и одометр 28, соединенные с обрабатывающим блоком 30. Линейная камера 26 при необходимости может состоять из нескольких блоков датчика, выровненных по одинаковой линии измерения. Линейная камера 26 смонтирована на шасси 32 определения местоположения, смонтированном под основным шасси 4 железнодорожного транспортного средства 2 определения местоположения. Одометр 28 смонтирован на одной из ходовых тележек 11.1.
[0079] Как показано на фиг.3, система 12 определения местоположения дополнительно содержит человеко-машинный интерфейс 34, расположенный в кабине 36 управления машины 1 для вмешательства. Этот человеко-машинный интерфейс 34 содержит экран 38 и человеко-машинный интерфейс 40 ввода, который может быть встроен в экран, если указанный экран представляет собой сенсорный экран, или может состоять, например, из клавиатуры или рычага управления.
[0080] Система 16 преобразования, схематично показанная на фиг.4, содержит управляющий блок 42, соединенный по меньшей мере с одной матричной камерой 44A преобразования и с контроллером 46 для управления указанным набором из одного или более приспособлений 11. Матричная камера 44А преобразования здесь поддерживается посредством шасси 45 транспортной тележки 9 железнодорожного транспортного средства 3 вмешательства. При необходимости управляющие блоки 42, 30 системы 16 преобразования и системы 12 определения местоположения могут быть объединены в один блок. Набор из одного или нескольких приспособлений 11 может быть любого типа, в частности, трамбовочное приспособление, забивающее приспособление или болтовое приспособление.
[0081] Благодаря конструкции рельсы железнодорожного пути 22 локально задают опорную плоскость, горизонтальную или наклонную, в соответствии с наклоном этого пути. Поскольку железнодорожное транспортное средство 2 определения местоположения движется по железнодорожному пути 22, считается, что шасси 4 устройства определения местоположения является параллельным этой опорной плоскости, что представляет собой приемлемое приближение для потребностей определения местоположения железнодорожного пути 22 и управления указанным набором из одного или более приспособлений 11. Фотоэлементы линейной камеры 26 направлены вдоль направления, перпендикулярного опорной плоскости.
[0082] На опорной плоскости, как показано на фиг.5, ориентацию линии 50 измерения, определенную линейной камерой 26, измеряют в опорной плоскости пути под углом δ относительно перпендикуляра 200 к опорной линии 122А, которая в этом первом варианте осуществления представляет собой нейтральную линию одного из рельсов 22а, 22b железнодорожного пути 22, принятого в качестве опорного рельса 22А. Эта ориентация считается неизвестной. Она может изменяться в зависимости от радиуса кривизны железнодорожного пути 22, положения линейной камеры 26 относительно ходовых тележек железнодорожного транспортного средства 2 определения местоположения и в зависимости от рыскания железнодорожного транспортного средства 2 определения местоположения относительно железнодорожного пути 22.
[0083] При каждом импульсе одометра 28 определяют криволинейную абсциссу системы 12 определения местоположения вдоль опорной линии 122A.
[0084] В данный момент линейная камера 26 захватывает мгновенные линейные оптические данные, составляющие линию измерений, которая охватывает всю ширину железнодорожного пути 22, при необходимости включая ширину шпал. Этот ввод повторяют, и последовательные линии измерения обеспечивают возможность построения двухмерного растрового изображения, имеющего шаг, являющийся функцией расстояния, пройденного между двумя измерениями.
[0085] В соответствии с первым вариантом осуществления, одометр 28 подает импульс каждый раз, когда проходит известное базовое расстояние в направлении 100 продвижения железнодорожного транспортного средства 2 определения местоположения на железнодорожном пути 22, причем эти последовательные импульсы используют для запуска линейной камеры 26. Тогда пространственный интервал между двумя последовательными линиями растрового изображения известен и является постоянным.
[0086] В соответствии с другим вариантом осуществления линейную камеру 26 запускают с временными интервалами, определенными посредством деления наблюдаемого временного интервала между двумя последовательными импульсами одометра 28. Таким образом, наблюдают время T, прошедшее между импульсами I-1 и I одометра, это время T делят на заранее определенное ненулевое целое число N и период T/N используют в качестве временного интервала между двумя запусками линейной камеры на временном интервале, разделяющем импульс I и импульс I+1 одометра. Апостериори, между импульсами I и I+1 одометра наблюдают запуск, и из этого выводят пространственный шаг между двумя запусками линейной камеры между импульсами I и I+1. Если предполагается, что скорость продвижения незначительно изменяется в этом масштабе, можно предположить, что между двумя последовательными импульсами этот шаг будет постоянным. Также могут быть предусмотрены другие предположения, считающие, например, что между двумя импульсами изменение скорости (ускорение или замедление) является постоянным, и, в результате, между двумя импульсами I и I+1 будет линейно изменяемый пространственный шаг.
[0087] В соответствии с другим вариантом осуществления линейную камеру 26 запускают с регулярными интервалами, а данные визуального изображения имеют временные метки. Импульсы одометра 28 также имеют временные метки таким образом, что обеспечивается возможность определения посредством интерполяции пути, пройденного между двумя последовательными линиями растрового изображения, который может изменяться.
[0088] В соответствии с альтернативным вариантом этого последнего варианта осуществления линейную камеру 26 запускают с интервалами, которые не обязательно являются регулярными, таким образом, чтобы уплотнять измерения в зоне интереса, где оказывается полезной повышенная точность, и располагать их на большем расстоянии в зонах без интереса, что обеспечивает возможность оптимизации объема данных.
[0089] Растровое изображение, полученное в результате последовательных вводов линейной камеры 26, искажается из-за угла δ между перпендикуляром к опорной линии 122A и линейной камерой 26. Если в опорной плоскости рассматривают декартову систему отсчета, в которой ось X параллельна опорной линии 122A, а ось Y перпендикулярна оси X, то наблюдают, что две точки P1, P2 железнодорожного пути 22, одновременно измеряемые посредством линейной камеры 26 на расстоянии друг от друга, на искаженном растровом изображении выглядят имеющими одинаковую абсциссу, а в декартовой системе отсчета, определенной ранее, фактически имеют различную абсциссу, причем эта разность пропорциональна расстоянию между двумя точками и синусу указанного угла δ. Кроме того, две точки P1, P3 железнодорожного пути 22, которые имеют одинаковую ординату в декартовой системе отсчета, определенной ранее, на искаженном растровом изображении кажутся удаленными друг от друга, причем их кажущееся расстояние зависит от косинуса указанного угла δ.
[0090] Можно «исправить» искаженное изображение посредством оценки этого угла δ.
[0091] Первая оценка угла δ может быть получена посредством сравнения расстояния, измеряемого на заданной линии измерения линейной камеры между двумя известными точками интереса, с известным расстоянием между этими точками. Таким образом, на заданной линии измерения можно оценивать расстояние, измеряемое между двумя точками, одна из которых расположена в центре опорного рельса 22А, а другая расположена в центре другого рельса 22В железнодорожного пути 22. Отношение между расстоянием E между рельсами и измеренным расстоянием D по абсолютной величине равно косинусу угла δ:
[0092] Но, кроме того, что это оценка угла δ не обеспечивает возможность определения его знака, точность оценки для малых значений угла δ является низкой, а производная функции косинуса, имеет значение, близкое к нулю. Это также предполагает, что фактическое расстояние между рельсами является постоянным и известно с требуемой точностью.
[0093] Второй способ оценки может быть реализован на основе матричных изображений посредством маркировки на искаженном растровом изображении заранее определенного объекта, присутствующего на пути, контур или определенные размеры которого известны, и посредством сравнения видимого контура или размеров, измеряемых на искаженном растровом изображении, с этим известным контуром или реальными размерами. Но на практике объекты, которые могли бы служить для этого сравнения, на железнодорожном пути не расположены с достаточно близкими интервалами. Другими словами, использование этого способа может приводить к оценкам угла δ, слишком далеко расположенных друг от друга.
[0094] Для оценки угла δ предпочтительно прибегнуть к использованию устройства 52 ориентации, присоединенного к шасси 32 определения местоположения.
[0095] В соответствии с вариантом осуществления устройство 52 ориентации содержит щуп, прикрепленный к шасси определения местоположения.
[0096] В соответствии с другим вариантом осуществления устройство 52 ориентации содержит по меньшей мере одну первую матричную камеру 54А ориентации, прикрепленную к шасси 32 определения местоположения и имеющую направление обзора, перпендикулярное к опорной плоскости железнодорожного пути 22, обращенное к одному из двух рельсов 22А, 22В, например, опорному рельсу 22А. Растровое изображение ориентации, переданное посредством матричной камеры ориентации, обеспечивает возможность идентификации посредством обработки изображения направления опорной линии 122А и определения ее ориентации на растровом изображении ориентации, что, таким образом, дает прямой доступ к ориентации шасси 32 определения местоположения под углом δ к линейной камере 26.
[0097] Для ограничения вычислительной мощности, необходимой для обработки изображения ориентации первой матричной камеры 54А ориентации, можно выполнять только измерения угла δ, когда это необходимо, в частности, когда оценивают или когда определяют, что угол δ должен был измениться.
[0098] На практике получается, что на протяжении пространства между шпалами наблюдаемые изменения угла δ являются небольшими. Таким образом, преимущественно можно использовать одометр 28 для запуска первой матричной камеры 54А ориентации каждый раз, когда по опорному рельсу 22А было пройдено заранее определенное расстояние, причем это расстояние предпочтительно является равным пространству между шпалами. Также можно использовать операции обработки изображения, выполняемые также на искаженном растровом изображении, переданном линейной камерой 26, и осуществлять запуск снимка посредством первой матричной камеры 54А ориентации каждый раз, когда на искаженном растровом изображении обнаруживают новое пространство между шпалами.
[0099] Также можно выбирать запуск первой матричной камеры 54А ориентации, когда благодаря другим измеренным данным определяют, что существует вероятность того, что угол δ был изменен. Например, для этой цели можно использовать акселерометр, расположенный на шасси 32 определения местоположения. Также можно использовать изменения упомянутого выше расстояния D, измеряемого между рельсами 22A, 22B, посредством линейной камеры 26. Естественно, также можно комбинировать режимы запуска, например, комбинируя систематический запуск посредством одометра 28 и дополнительный запуск в зависимости от измеряемых или отслеживаемых данных.
[00100] При известных амплитуде и синусу угла δ можно «исправить» искаженное растровое изображение, получаемое на основе последовательных снимков линейной камеры 26 и измерений пройденного расстояния, получаемых посредством одометра 28.
[00101] Также можно ограничивать это исправление до нескольких точек интереса, идентифицируемых на искаженном изображении в заданном пространстве между шпалами. Кроме того, это является предпочтительным решением для ограничения необходимой вычислительной мощности, поскольку искажение, наблюдаемое на искаженном изображении, не препятствует определению местоположения точек интереса на неисправленном искаженном изображении посредством обработки этого изображения.
[00102] На практике и при условии, что измерение угла δ было запущено заранее, на искаженном растровом изображении определяют местоположение пространственного индексирующего маркера заранее определенной характерной особенности, например, центра 56 болта, расположенного вблизи заранее определенной стороны опорного рельса 22А и на ней, или любого другого заранее определенного компонента пути, например, крепежного элемента или сердечника стрелки. В частности, это определение может быть выполнено посредством сравнения искаженного растрового изображения с различными заранее определенными формами заранее определенного компонента пути, искаженных в соответствии с углом δ, или посредством искусственной нейронной сети или, в частности, блока искусственного интеллекта, получившего предварительное обучение, в частности углубленное обучение, например, посредством технологии сегментации изображения пиксель за пикселем (тип SegNet), или посредством технологии обнаружения объекта (тип RFCN). После идентификации этого пространственного индексирующего маркера 56 на искаженном изображении считывают его видимое расстояние относительно опорной линии 122А и вычисляют фактическое расстояние между пространственным индексирующим маркером 56 и опорной линией 122А, измеряемое перпендикулярно к опорной линии 122А в зависимости от угла δ. Затем это с помощью пространственного индексирующего маркера 56 и опорной линии 122А (предполагается прямолинейной в масштабе пространства между шпалами) дает локальную двумерную систему отсчета определения местоположения для рассматриваемого пространства между шпалами. Для получения представления, эта система отсчета может иметь в качестве начала отсчета проекцию O пространственного индексирующего маркера на опорную линию 122А перпендикулярно к опорной линии 122А, в качестве оси X - опорную линию 122А, ориентированную в направлении 100 продвижения транспортного средства 2, и в качестве оси Y - перпендикуляр к оси X, проходящий через начало O отсчета (и через пространственный индексирующий маркер 56).
[00103] Далее фокусируются на зоне интереса, ограниченной поперечными краями 58, 60 двух последовательных шпал 62, 64 и внутренними краями 66, 68 двух рельсов 22А, 22В (потенциальной кривизной которых в этом масштабе можно пренебречь). На пути эта зона составляет четырехугольник, который может быть задан пересечениями A, B, C, D между краями шпал 58, 60 и внутренними краями 66, 68 двух рельсов 22A, 22B. На искаженном растровом изображении само четырехугольное изображение искажено, но, тем не менее, выполнено с возможностью обнаружения посредством своих вершин. Затем для получения координат вершин A, B, C, D в системе отсчета определения местоположения достаточно на искаженном изображении определить координаты этих вершин и применить необходимое исправление в зависимости от угла δ.
[00104] На практике контрастность изображений не всегда достаточна для обеспечения возможности определения на искаженном растровом изображении краев шпал и рельса в непосредственной близости от точек пересечения A, B, C, D. В соответствии с альтернативным вариантом, таким образом, предпочтительно определять зону интереса как четырехугольник, ограниченный пересечениями A', B', C', D' между нейтральными линиями 162, 164, построенными для каждой из шпал 62, 64, и нейтральными линиями 122А, 122В, построенными для каждого из рельсов 22А, 22В. Нейтральные линии выстраивают посредством обработки изображений по всему пространству между шпалами.
[00105] Также фокусируются на идентификации потенциальных препятствий в четырехугольной зоне интереса <A, B, C, D> или <A', B', C', D'>. Наличие или отсутствие таких препятствий обеспечивает возможность квалификации этой зоны интереса в качестве зоны возможного вмешательства (разрешенная зона) или зоны возможного исключения (запрещенная зона). Независимо от обнаружения препятствий, размеры зоны интереса могут быть использованы для квалификации этой зоны интереса в качестве зоны возможного вмешательства (если пространство между шпалами является достаточным для обеспечения возможности последующего вмешательства) или как запрещенную зону.
[00106] Приведенные выше операции (вычисление угла δ, определение местоположения пространственного индексирующего маркера 56 и вычисление его расстояния до опорной линии 122А, определение местоположения четырехугольника, состоящего из точек интереса <A, B, C, D> или <A’, B’, C’, D’> и вычисление их координат в системе O, х, у отсчета определения местоположения, заданной посредством пространственного индексирующего маркера 56 и опорной линии 122А, определение местоположения возможных препятствий) выполняют циклически для каждого пространства между шпалами и инициируют либо посредством одометра 28, либо посредством распознавания края шпалы на искаженном растровом изображении. На практике каждому циклу и каждому пространству между шпалами присваивают порядковый номер.
[00107] Эти обрабатывающие операции выполняют при помощи алгоритмов распознавания формы. Человеко-машинный интерфейс 34 обеспечивает возможность их инвалидации при необходимости (если по умолчанию считается, что автоматическое распознавание является достоверным) или их валидации (по меньшей мере в режиме обучения до тех пор, пока уровень достоверности распознавания формы является недостаточным). С этой целью оператор может просматривать искаженное изображение, которое отображают на управляющем экране 38 человеко-машинного интерфейса 34. Четырехугольник <A, B, C, D> или <A’, B’, C’, D’> материализуют на экране с наложением, например посредством цветного четырехугольника, причем при необходимости идентифицированные вероятные препятствия отмечают в соответствии с заранее определенными визуальными условными обозначениями (стрелка, контур и т. д.). Можно обеспечивать возможность того, что при нахождении в режиме валидации оператор щелкает указателем в зоне интереса для подтверждения ее статуса. Напротив, можно обеспечивать возможность того, что при нахождении в режиме обслуживания, оператор щелкает указателем в зонах интереса для отмены ее статуса. Естественно, можно обеспечивать большое количество альтернативных вариантов для взаимодействия между оператором и системой 12 определения местоположения в соответствии с требуемыми эргономикой и задачами.
[00108] В конце процедуры определения местоположения, описанной ранее, для каждого пространства между шпалами в локальной системе <O, x, y> отсчета доступны координаты точек A, B, C, D или A', B', C', D' интереса, определяющие границы зоны [A, B, C, D] или [A', B', C', D'] интереса, квалифицированной как разрешенная или запрещенная. Также можно иметь другие доступные данные, такие как линия между шпалами.
[00109] Эти данные передают на управляющий блок 42 системы 16 преобразования для того, чтобы он мог извлекать из этого пользу в тот момент, когда после непрерывного продвижения вперед железнодорожного транспортного средства 3 вмешательства система 16 преобразования расположена на высоте заранее определенного пространства, заранее определенного системой 12 определения местоположения. Вследствие кривизны железнодорожного пути 22 положение транспортной тележки 9 по сравнению с заданным пространством между шпалами, когда матричная камера 44А системы 16 преобразования расположена над указанным пространством между шпалами, различается от положения, полученного ранее посредством шасси 4 системы 12 определения местоположения, когда линейная камера 26 была расположена над тем же пространством между шпалами.
[00110] Система 16 преобразования направлена на обеспечение возможности преобразования, то есть изменения декартовой системы отсчета, координат, определенных посредством системы 12 определения местоположения в системе <O, x, y> отсчета определения местоположения, связанной с заданным пространством между шпалами, в координаты, которые можно использовать на уровне системы 16 преобразования, в частности, для управления указанным набором из одного или более приспособлений 11.
[00111] Для этой цели, матричная камера 44A системы 16 преобразования расположена обращенной к опорному рельсу 22А и имеет достаточную ширину поля для захвата изображения как опорного рельса 22А, так и пространственного индексирующего маркера 56, при этом следует напомнить, что он был выбран вблизи опорного рельса 22А.
[00112] В первую очередь система 16 преобразования должна быть выполнена с возможностью определения, какие данные местоположения в данный момент свойственны для пространства между шпалами, просматриваемого матричной камерой 44А системы 16 преобразования.
[00113] Тем не менее знания геометрии машины 1 для вмешательства может оказаться недостаточным даже для грубой оценки расстояния между одометром 28 системы 12 определения местоположения и матричной камерой 44А системы 16 преобразования, поскольку транспортная тележка 9 предполагается выполненной с возможностью перемещения относительно основного шасси 6 железнодорожного транспортного средства 3 вмешательства. Таким образом, требуется дополнительное измерение, которое может быть выполнено посредством датчика положения транспортной тележки 9 в отношении основного шасси 6 или посредством дополнительного одометра 70, объединенного с ходовой тележкой 10 транспортной тележки 2.
[00114] Объединенные измерения датчика положения транспортной тележки 9 и одометра 28 системы 12 определения местоположения или, альтернативно, измерения одометра 70 системы 16 преобразования обеспечивают возможность определения с достаточной степенью достоверности, какие данные местоположения в данный момент свойственны для пространства между шпалами, просматриваемого матричной камерой 44А системы 16 преобразования.
[00115] Матричная камера 44А преобразования соединена с системой отсчета преобразования, закрепленной относительно транспортной тележки 9. Посредством обработки растрового изображения матричной камеры 44 преобразования блок 42 преобразования идентифицирует опорный рельс 22А, строит нейтральную линию 122А, которая составляет опорную линию, и на этом растровом изображении определяет ее ориентацию, что дает прямой доступ к углу γ ориентации системы O, x, y отсчета определения местоположения относительно системы отсчета преобразования. Блок 42 преобразования также идентифицирует пространственный индексирующий маркер 56 и строит проекцию пространственного индексирующего маркера 56 на опорный рельс 22А перпендикулярно к последнему, которая задает начало O отсчета системы <O, х, у> отсчета определения местоположения и ее координаты в системе отсчета преобразования. Затем блок 42 преобразования может преобразовывать в систему отсчета преобразования координаты точек A, B, C, D интереса, которые система 12 определения местоположения передала на него в системе <O, x, y> отсчета определения местоположения.
[00116] Исходя из этого, для управления указанным набором из одного или более приспособлений 11 на контроллер 46 можно передавать преобразованные координаты зоны интереса и ее квалификацию (как зоны возможного вмешательства). Затем контроллер 46 генерирует команды, которые обеспечивают указанному набору из одного или более приспособлений 11 возможность вмешательства или невмешательства в зону A, B, C, D интереса, границы которой определены таким образом. При необходимости может существовать одна или более степеней свободы перемещения указанного набора из одного или более приспособлений 20 относительно шасси 45 преобразования, поддерживающего камеру (камеры) 44A, 44B преобразования. Команда может содержать вращение указанного набора из одного или более приспособлений 20 вокруг оси, перпендикулярной опорной плоскости, или перемещение указанного набора из одного или более приспособлений 20 в поперечном направлении для оптимизации его позиционирования относительно пространства между шпалами. Команда также может содержать подъем или опускание указанного набора из одного или более приспособлений 20 в соответствии с квалификацией зоны интереса, как зоны возможного вмешательства или как запрещенной зоны.
[00117] Естественно, примеры, представленные на чертежах и обсужденные выше, приведены только для иллюстративных и неограничивающих целей. В явном виде предусматривается, что для предложения других вариантов осуществления изобретения можно комбинировать различные проиллюстрированные варианты его осуществления.
[00118] Опорная линия, выбранная во время этапа определения местоположения, не обязательно представляет собой линию, на которой выполняют оценку угла δ. При необходимости можно выбирать в качестве опорной линии нейтральную линию 122B рельса 22B и измерять угол δ относительно рельса 22A.
[00119] В соответствии с альтернативным вариантом опорная линия, построенная системой 12 для определения местоположения, является виртуальной в том смысле, что она не связана с конкретным рельсом 122A, 122B. Например, она может представлять собой срединную линию 222 железнодорожного пути, построенную на основе нейтральных линий 122А и 122В рельсов 22А, 22В железнодорожного пути 22. Таким образом, избавляются от особенностей, таких как прерывания одного из рельсов на уровне путевого устройства.
[00120] Эта срединная линия может быть построена посредством обработки искаженного растрового изображения, посредством осуществления поиска по точкам в каждой линии измерения линейной камеры 26 середины сегмента, ограниченного центрами двух рельсов 22A, 22B, или, предпочтительно, посредством построения сначала нейтральных линий 122A, 122B каждого рельса 22A, 22B, а затем линии, расположенной на среднем расстоянии от нейтральных линий 122A, 122B.
[00121] В этом предположении виртуальной опорной линии, построенной и используемой системой 12 определения местоположения, система 16 преобразования также должна быть выполнена с возможностью перестройки этой виртуальной опорной линии. Для этой цели система преобразования предпочтительно содержит вторую матричную камеру 44В преобразования, расположенную над вторым рельсом 22В и обращенную к нему.
[00122] Вторая матричная камера 44B преобразования прикреплена к шасси 45 преобразования транспортной тележки 9 таким образом, что относительное положение двух матричных камер 44A, 44B преобразования известно и откалибровано. Хотя каждая матричная камера 44А, 44В преобразования имеет только уменьшенную ширину поля обзора, обеспечивающую возможность просмотра только того рельса 22А, 22В, над которым она расположена, можно определять положение срединной линии 222 между нейтральными линиями 122А, 122B посредством определения положения нейтральной линии 122A первого рельса 22A на растровом изображении первой камеры 44A преобразования, посредством определения положения нейтральной линии 122B второго рельса 22B на растровом изображении второй камеры 44B преобразования и посредством вычисления центра сегмента прямой линии между двумя нейтральными линиями 122A, 122B на основании этих измерений и данных калибровки расстояния между двумя камерами 44A, 44B преобразования.
[00123] В соответствии с альтернативным вариантом системы 12 определения местоположения она содержит вторую матричную камеру 54B ориентации, прикрепленную к шасси 4 транспортного средства 4 определения местоположения и имеющую направление обзора, перпендикулярное опорной плоскости железнодорожного пути 22, обращенной к другому рельсу 22B. Вторую матричную камеру 54B ориентации могут использовать для того, чтобы дать второе значение угла δ, измеряемое относительно второго рельса 22B. Для использования этих данных могут быть реализованы различные алгоритмы. Например, можно назначать доверительный индекс для каждого растрового изображения, передаваемого одной или другой матричной камерой ориентации, например, в зависимости от контраста изображения, наличия или отсутствия на изображении рельса или любого другого критерия, всего для того, чтобы сохранить для каждого пространства между шпалами то измерение угла δ, которое имеет наилучший доверительный индекс. Также можно комбинировать измерения, выполненные для расчета «среднего» угла δ. Поскольку расстояние между двумя матричными камерами 54А, 54B известно и откалибровано, также можно использовать эти камеры для определения виртуальной опорной линии 222, упомянутой выше. И, наконец, можно предусмотреть два независимых измерения и вычисления путей, один из которых использует первую матричную камеру 54А ориентации и первую матричную камеру 44А преобразования относительно первой опорной линии 122А, а другой использует вторую матричную камеру 54B и вторую матричную камеру 44B преобразования относительно первой опорной линии 122В. При необходимости также можно предусматривать два одометра на уровне системы наблюдения, по одному для каждого рельса 22A, 22B, при этом каждый предназначен для одного из двух измерений и вычислений путей.
[00124] На этапе определения местоположения идентификация точек интереса не ограничена идентификацией вершин A, B, C, D или A', B', C', D' четырехугольника вероятного вмешательства. Могут быть идентифицированы другие типы точек интереса, например, координаты центров головок винтов, подлежащих завинчиванию или замене. Зона вмешательства не обязательно представляет собой четырехугольник, но может быть любым многоугольником. Также можно попытаться идентифицировать - вместо точек A, B, C, D интереса или в дополнение к ним - линии интереса, например, прямые линии, составляющие нейтральные линии 162, 164 шпал 62, 64, каждая из которых расположена в соответствующем центре шпалы 62, 64, или прямую линию 163, составляющую проходящую между шпал линию, которая представляет собой ось симметрии для предыдущих прямых линий 162, 164, расположенную на среднем расстоянии между двумя шпалами 62, 64. В локальной системе <O, x, y> отсчета координаты таких прямых линий могут представлять собой, например, координаты двух принадлежащих ей точек или координаты точки этой линии и угла.
[00125] Хотя предшествующее описание было сфокусировано на пространстве между шпалами, с помощью системы определения местоположения также можно анализировать участки пути, содержащие шпалы, в частности, для обнаружения на них точек интереса, требующих вмешательства.
[00126] Обработка данных одометра 28, линейной камеры 26 и устройства 52 ориентации посредством системы 12 определения местоположения выполняют в режиме реального времени или с незначительной задержкой таким образом, что ее можно использовать посредством системы 16 преобразования, принадлежащей той же постоянно продвигающейся вперед машине 10 для вмешательства. Расстояние между системой 12 определения местоположения, расположенной в передней зоне 14 транспортного средства 2 определения местоположения в направлении 100 продвижения, с одной стороны, и системой 16 преобразования, расположенной на расстоянии и в направлении к задней части этого транспортного средства, а с другой стороны, преимущественно используют, в частности, для обеспечения оператору возможности валидации или инвалидации точек A, B, C, D интереса или их квалификации.
[00127] Альтернативно, можно продвигать машину 10 для вмешательства в направлении для определения местоположения, а затем возвращать ее назад для того, чтобы во время второго прохода выполнять преобразование и управление указанным набором из одного или более приспособлений. Во время этого преобразования транспортное средство может продвигаться в направлении, противоположном направлению продвижения во время определения местоположения, или в том же направлении.
[00128] Обсуждаемая железнодорожная машина 10 для вмешательства может состоять из одного или более транспортных средств, шарнирно соединенных между собой. Таким образом, при необходимости система 12 определения местоположения, система 16 преобразования и указанный набор из одного или более приспособлений 11 могут находиться на одном и том же транспортном средстве. В соответствии с другим вариантом осуществления система 12 определения местоположения может быть смонтирована на каретке, движущейся по пути и шарнирно соединенной с указанной передней частью посредством роликового блока, несущего систему 16 преобразования и указанный набор из одного или более приспособлений 11.
[00129] Также можно предусмотреть, чтобы система 12 определения местоположения была смонтирована на автономном транспортном средстве определения местоположения, независимом от машины 10 для вмешательства, несущей указанный набор из одного или более приспособлений 11. В этом последнем предположении является преимущественным обеспечение на транспортном средстве определения местоположения блока абсолютного позиционирования, например блока GPS, для того, чтобы обеспечивать возможность назначения каждому пространству между шпал координат в системе отсчета абсолютного позиционирования, которые являются достаточно точными для проведения различий между двумя последовательными пространствами между шпалами.
[00130] При необходимости, указанный набор из одного или более приспособлений 20 может быть закреплен относительно основного шасси 6 транспортного средства 3 вмешательства. Затем можно приблизительно оценивать положение указанного набора из одного или более приспособлений 20 на основе только одних данных одометра 28 системы 12 определения местоположения для того, чтобы определять, какие данные определения местоположения в данный момент являются релевантными для преобразования.
[00131] Хотя настоящее описание в особенности сфокусировано на использовании процедуры преобразования для управления приспособлением для вмешательства, преобразование также может быть преимущественно использовано для операции точного обследования пути посредством приспособления для обследования, переносимого шасси, удаленным от шасси определения местоположения.
[00132] Человеко-машинный интерфейс 34 также может быть удаленным относительно транспортного средства 10, например может быть расположен на посту дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТОЧЕК ИЛИ ЛИНИЙ ИНТЕРЕСА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2019 |
|
RU2772643C2 |
| Способ управления набором из одного или более приспособлений для вмешательства, смонтированных на железнодорожном транспортном средстве для вмешательства | 2019 |
|
RU2772798C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2385446C2 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| Способ определения положения шпал рельсового пути | 2023 |
|
RU2806764C1 |
| Способ определения положения центров шпал рельсового пути | 2023 |
|
RU2821619C1 |
| СИСТЕМА, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ДЕТЕКЦИИ ПОЛОЖЕНИЯ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ЛИНЕЙНЫХ ИНФРАСТРУКТУР, В ЧАСТНОСТИ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОЙ ЛИНИИ | 2020 |
|
RU2791472C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2020 |
|
RU2740485C1 |
| СИСТЕМА КОНТРОЛЯ ПУТИ | 2020 |
|
RU2810283C2 |
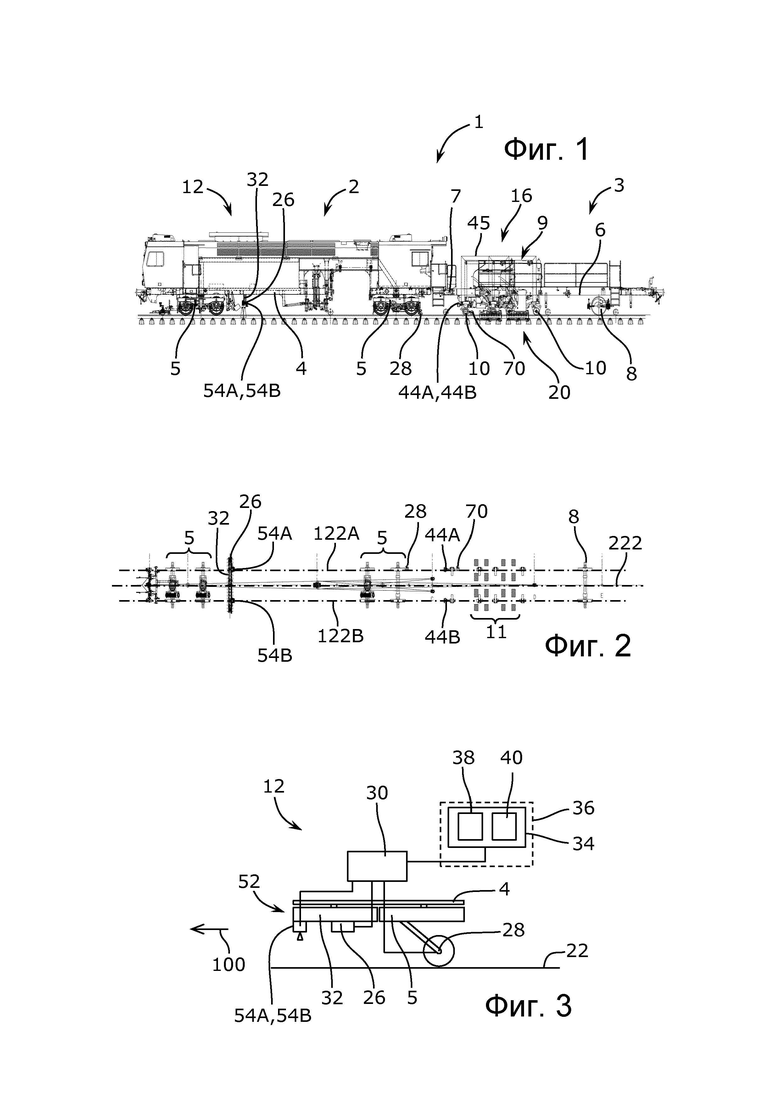
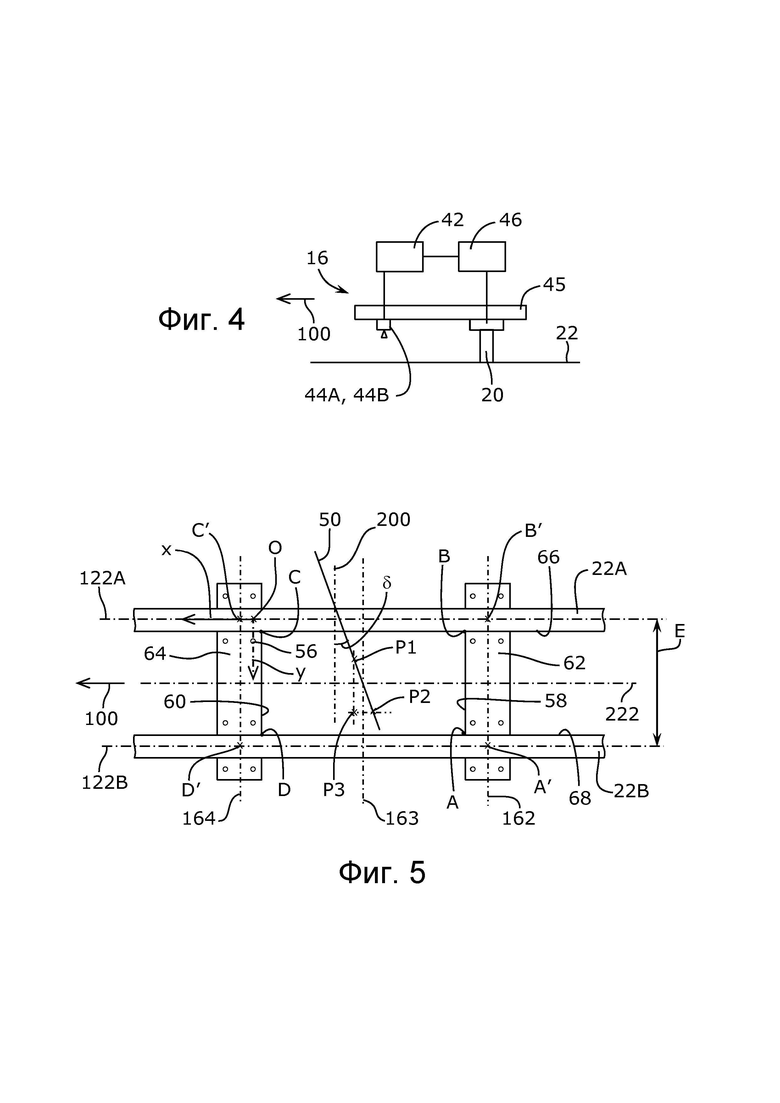
Изобретение относится к средствам обслуживания и мониторинга железнодорожного пути. Способ определения местоположения точек или линий (A, B, C, D) интереса на железнодорожном пути (22) посредством системы (12) определения местоположения железнодорожного пути, содержащей линейную камеру (26) и одометр (28), продвигающейся по железнодорожному пути (22) в направлении (100) продвижения, одометр (28) неоднократно собирает мгновенные данные положения линейной камеры (26) относительно железнодорожного пути (22) в направлении (100) продвижения, а линейная камера (26), направленная на железнодорожный путь (22), неоднократно собирает мгновенные линейные оптические данные вдоль линии (50) мгновенного измерения. Затем посредством обработки по меньшей мере мгновенных линейных оптических данных и мгновенных данных позиционирования выстраивают растровое изображение зоны поверхности железнодорожного пути (22) и на этом растровом изображении идентифицируют по меньшей мере один пространственный индексирующий маркер (56) заранее определенной характерной особенности и его положение относительно опорного рельса (22А) железнодорожного пути (22). На растровом изображении идентифицируют точки или линии (A, B, C, D) интереса, а координаты указанных точек или линий интереса определяют в двумерной системе O, x, y отсчета определения местоположения, связанной с пространственным индексирующим маркером (56) и опорной линией (22А). Достигается повышение точности и заблаговременности определения местоположений точек или линий интереса на железнодорожном пути. 3 н. и 13 з.п. ф-лы, 5 ил.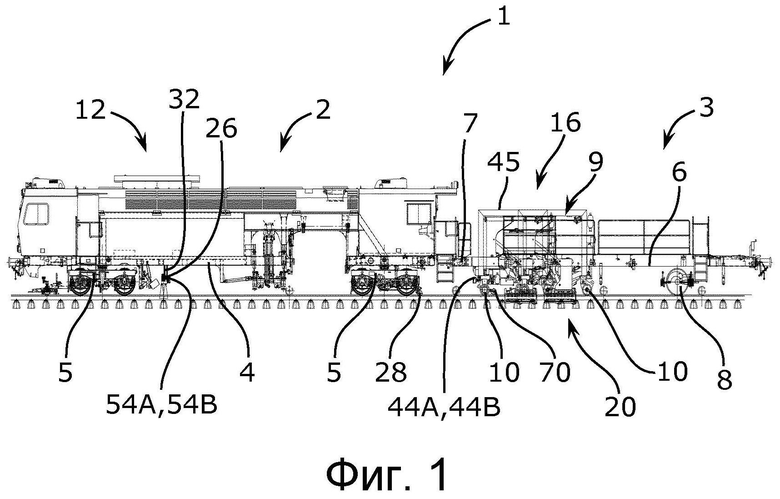
1. Способ определения местоположения железнодорожного пути (22), выполняемый посредством системы (12) определения местоположения железнодорожного пути, содержащей по меньшей мере одну линейную камеру (26), направленную на железнодорожный путь (22), и один или более одометров (28), причем система (12) определения местоположения железнодорожного пути выполнена с возможностью продвижения по железнодорожному пути (22) в направлении (100) продвижения, а способ определения местоположения включает следующие действия:
- неоднократный сбор с помощью указанного одометра (одометров) (28) данных продвижения системы (12) определения местоположения железнодорожного пути на железнодорожном пути (22) в направлении (100) продвижения,
- неоднократный сбор с помощью линейной камеры (26), направленной на железнодорожный путь (22), мгновенных линейных оптических данных вдоль линии (50) мгновенного измерения,
- посредством обработки по меньшей мере мгновенных линейных оптических данных и, при необходимости, данных продвижения построение растрового изображения зоны поверхности железнодорожного пути (22),
- посредством обработки построенного растрового изображения идентификацию на построенном растровом изображении по меньшей мере одного пространственного индексирующего маркера (56) заранее определенной характерной особенности и посредством обработки по меньшей мере данных продвижения определение криволинейной абсциссы пространственного индексирующего маркера (56) и положения указанного пространственного индексирующего маркера (56) относительно опорной линии (122А, 122В, 222) железнодорожного пути (22),
и отличается тем, что:
- на построенном растровом изображении идентифицируют точки или линии (А, В, С, D, А', В', С', D', 162, 163, 164) интереса, а в двумерной системе отсчета определения местоположения, связанной с пространственным индексирующим маркером (56) и с опорной линией (122А, 122В, 222), определяют координаты указанных точек или линий интереса.
2. Способ по п. 1, отличающийся тем, что сбор мгновенных линейных оптических данных запускают посредством приема данных продвижения.
3. Способ по п. 1, отличающийся тем, что мгновенные линейные оптические данные и данные продвижения собирают синхронизированным образом.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что данные продвижения и мгновенные линейные оптические данные имеют временные метки, а растровое изображение предпочтительно выстраивают в зависимости от указанных временных меток.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что точки или линии (А, В, С, D, А', В', С', D', 162, 163, 164) интереса составляют границы зоны интереса, предпочтительно, представляют собой вершины четырехугольника, составляющего зону интереса.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что опорная линия (122А, 122В, 222) представляет собой нейтральную линию одного из рельсов (22А, 22В) железнодорожного пути (22) или линию, построенную на основе нейтральных линий рельсов (22А, 22В) железнодорожного пути (22).
7. Способ определения местоположения по любому из предшествующих пунктов, отличающийся тем, что устройством (52) ориентации системы (12) определения местоположения железнодорожного пути неоднократно определяют данные угловой ориентации этой системы (12) определения местоположения железнодорожного пути относительно опорной линии (122А, 122В, 222), причем координаты точек или линий (А, В, С, D, А', В', С', D', 162, 163, 164) интереса определяют в зависимости от указанных данных ориентации.
8. Способ по п. 7, отличающийся тем, что устройство (52) ориентации системы определения местоположения содержит по меньшей мере один первый щуп для обнаружения ориентации системы (12) определения местоположения относительно первого рельса (22А) железнодорожного пути, составляющего первый рельс (22А) ориентации, и, предпочтительно, содержит второй щуп для обнаружения ориентации системы (12) определения местоположения относительно второго рельса (22В) железнодорожного пути, составляющего второй рельс (22В) ориентации.
9. Способ по любому из пп. 7-8, отличающийся тем, что устройство (52) ориентации системы определения местоположения содержит по меньшей мере одну первую матричную камеру (54А) ориентации, расположенную обращенной к первому из рельсов железнодорожного пути, составляющему первый рельс (22А) ориентации, причем устройство (52) ориентации делает снимки с помощью первой матричной камеры ориентации и обрабатывает указанные снимки таким образом, чтобы обнаруживать на них ориентацию первого рельса (22А) ориентации относительно цели первой матричной камеры (54А) ориентации, и предпочтительно содержит вторую матричную камеру (54В) ориентации, расположенную обращенной ко второму из рельсов железнодорожного пути, составляющему второй рельс (22В) ориентации, причем устройством (52) ориентации делают снимки с помощью второй матричной камеры ориентации и обрабатывают указанные снимки таким образом, чтобы обнаруживать ориентацию второго рельса (22В) ориентации относительно цели второй матричной камеры (54В) ориентации.
10. Способ по любому из пп. 7-9, отличающийся тем, что система (12) определения местоположения выполнена с возможностью различения зон поверхности железнодорожного пути (22), содержащих шпалы (62, 64), и зон между шпалами поверхности пути (22), причем устройство ориентации выполнено с возможностью передачи данных ориентации только один раз для каждой из зон между шпалами.
11. Способ по любому из пп. 7-10, отличающийся тем, что данные ориентации используют для определения опорной линии.
12. Способ определения местоположения по любому из предыдущих пунктов, отличающийся тем, что он включает воспроизведение растрового изображения на просмотровом экране (38) системы (12) определения местоположения.
13. Способ определения местоположения по п. 12, отличающийся тем, что он включает визуальную идентификацию на просмотровом экране (38) точек или линий (А, В, С, D, А', В', С', D', 162, 163, 164) интереса.
14. Способ определения местоположения по любому из пп. 12-13 в комбинации с п. 5, отличающийся тем, что он включает валидацию и/или инвалидацию по меньшей мере некоторых из точек или линий интереса или зоны интереса или квалификацию зоны интереса в качестве зоны возможного вмешательства или запрещенной зоны после осуществления ввода на человеко-машинном интерфейсе (40) ввода.
15. Способ позиционирования, выполняемый посредством измерительного узла, содержащего систему (12) определения местоположения и систему (16) преобразования, причем система (12) определения местоположения содержит линейную камеру (26) и одометр (28), система (16) преобразования содержит одну или более матричных камер (44А, 44В) преобразования, расположенных на расстоянии от линейной камеры (26) системы (12) определения местоположения в направлении (100) продвижения и за ней, а способ включает: этап определения местоположения, выполняемый системой (12) определения местоположения и осуществление способа по любому из предыдущих пунктов; а затем этап преобразования, выполняемый системой (16) преобразования и включающий следующие действия:
сбор с помощью матричной камеры (камер) (44А, 44В) преобразования набора из одного или более матричных изображений преобразования в пространственной системе отсчета системы преобразования;
в зависимости от данных продвижения, собранных посредством одометра (28), идентификацию в указанном наборе из одного или более матричных изображений преобразования пространственного индексирующего маркера (56) и определение координат указанного пространственного индексирующего маркера (56) и характеристики данных опорной линии (122А, 122В, 222) в пространственной системе отсчета системы преобразования,
вычисление преобразованных координат точек или линий (А, В, С, D, А', В', С', D', 162, 163, 164) интереса в пространственной системе отсчета системы преобразования в зависимости от координат пространственного индексирующего маркера (56) и характеристики данных опорной линии (122А, 122В, 222) в пространственной системе отсчета системы преобразования, и координат точек или линий (А, В, С, D, А', В', С', D', 162, 163, 164) интереса в системе (О, х, у) отсчета определения местоположения.
16. Способ управления машиной (10) для вмешательства, продвигающейся по железнодорожному пути (22) в направлении (100) продвижения и содержащей приспособление (20) для вмешательства, смонтированное на шасси (48) вмешательства, посредством измерительного узла, содержащего систему (12) определения местоположения и систему (16) преобразования, причем система (12) определения местоположения содержит по меньшей мере одну линейную камеру (26) и одометр (28), система (16) преобразования содержит по меньшей мере одну матричную камеру (44А, 44В) преобразования, расположенную на расстоянии от линейной камеры (26) системы (12) определения местоположения в направлении (100) продвижения и за ней, матричная камера (44А, 44В) преобразования выполнена за одно целое с шасси (48) вмешательства приспособления (20) для вмешательства, а способ включает:
- процедуру позиционирования по п. 15;
- процедуру вмешательства, включающую позиционирование приспособления (20) для вмешательства в зависимости от координат точек или линий (А, В, С, D, А', В', С', D', 162, 163, 164) интереса в системе отсчета преобразования.
| EP 3138753 A1, 08.03.2017 | |||
| Способ изготовления электрических сопротивлений | 1958 |
|
SU115462A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

