Ссылка на родственную заявку
[0001] Настоящая заявка испрашивает приоритет в соответствии с предварительной заявкой на выдачу патента США №62/578,797, поданной 30 октября 2017 года. Содержание указанной заявки полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
[0002] Настоящее изобретение относится к регулируемым орбитальным устройствам, в том числе, помимо прочего, к полировальным машинкам, шлифовальным машинкам и массажерам.
Предшествующий уровень техники настоящего изобретения
[0003] Настоящее изобретение относится к способу и устройству регулировки хода на эксцентриковой (орбитальной) машинке, такой как, помимо прочего, полировальная машинка, шлифовальная машинка и массажер. Эта возможность регулировки позволяет пользователю задавать ход эксцентриковой (орбитальной) машинки и регулировать его в диапазоне от максимального полного хода до минимального, т.е. нулевого орбитального или вращательного хода.
[0004] Полировальные и шлифовальные машинки используются на регулярной основе в сфере обработки автомобильных деталей и жилищном строительстве для устранения дефектов в лакокрасочных покрытиях и гипсокартоне, а также для нанесения полиролей и воска. Для этого используются машинки трех основных типов, включая ротационные полировальные машинки, эксцентриковые (орбитальные) машинки и машинки двойного действия. Каждой из этих машинок отводится определенная роль, поскольку подошва каждой машинки вращается уникальным образом, выполняя разные функции.
[0005] Ротационные полировальные машинки характеризуются наибольшей частотой вращения и представляют собой наиболее эффективные средства устранения дефектов лакокрасочных покрытий заданным образом с получением хороших результатов. Приводной блок, используемый в ротационной полировальной машинке, напрямую соединен с подошвой, причем оба эти элемента совмещены друг с другом по оси. Для устранения царапин в лакокрасочном покрытии с помощью ротационной полировальной машинки обычно удаляется такой объем краски вокруг царапин, который достаточен для того, чтобы сгладить поверхность. Однако устранение царапин требует большой сноровки и навыков управления машинкой, которых нет у непрофессионала. Поэтому среднестатистический пользователь старается не пользоваться ротационной полировальной машинкой, так как можно легко снять слишком много краски и повредить финишное покрытие, оставив на нем круговые отметки или следы прижигания краски.
[0006] Эксцентриковые (орбитальные) машинки были введены в употребление для того, чтобы удовлетворить потребности среднестатистического пользователя, поскольку они не требуют большого опыта работы и навыков управления. В эксцентриковой (орбитальной) машинке используется коробка передач, содержащая два уникальных механизма, которые перемещают подошву, соединенную с опорным диском. В отличие от ротационной полировальной машинки в эксцентриковых (орбитальных) машинках центральная ось вращения подошвы и опорного диска смещена относительно приводного вала машинки. Это смещение обычно называется «ходом». В результате опорный диск и подошва обращаются по круговой орбите вокруг приводного вала. Одновременно с этим подошва вращается вокруг своей оси, так как она закреплена на свободном подшипнике. Это вращение вокруг своей оси регулируется давлением, которое оказывается на подошву, а не обеспечивается непосредственно приводом. Благодаря этому гарантируется полировка, в ходе которой не прижигается и не прорезается лакокрасочное покрытие, поскольку при этом не вырабатывается тепло вследствие вращения привода. Следовательно, эксцентриковые (орбитальные) машинки обеспечивают более высокий уровень безопасности и существенно уменьшают вероятность образования прожогов или круговых разводов на лакокрасочном покрытии.
[0007] Как и в эксцентриковых (орбитальных) машинках в машинках двойного действия центральная ось вращения подошвы и опорного диска смещена относительно приводного вала. В результате этого смещения опорный диск и подошва обращаются по круговой орбите вокруг приводного вала. Однако в случае с машинками двойного действия вращение подошвы обеспечивается непосредственно приводом.
[0008] Суть эксцентриковой (орбитальной) машинки составляет ее ход. Ход задается смещением между осью приводного вала и осью опорного диска. Чем больше смещение или ход, тем на большее расстояние ось вращения опорного диска отходит от оси приводного вала. Умножением смещения на два можно получить диаметр хода. Следовательно, термин «ход» обозначает диаметр пути, который проходит опорный диск при движении по круговой орбите вокруг приводного вала.
[0009] Большинство эксцентриковых (орбитальных) машинок представляет собой машинки с малым ходом, а это значит, что длина хода у таких машинок составляет всего около 6-12 мм. Машинка с малым ходом ограничивает движение подошвы небольшой и тесной орбитой. Это обеспечивает ее плавное действие. Машинкой с малым ходом также легче управлять, поскольку при движении по круговой орбите вокруг приводного вала опорный диск перемещается по ограниченной траектории. При этом за счет плавного действия машинки она меньше вибрирует и перемещается, и поэтому ее легче удерживать в руках.
[0010] Машинка с большим ходом обеспечивает повышенное число ОРМ (орбит в минуту) для опорного диска при его вращении с такой же частотой (об/мин) вследствие увеличения орбиты движения опорного диска и подошвы вокруг приводного вала. Большой ход также увеличивает перемещение подошвы, что способствует лучшему распределению полировальной пасты и увеличению площади обрабатываемой поверхности. При этом на лакокрасочное покрытие также оказывается большее режущее воздействие, что позволяет устранять царапины и дефекты этого лакокрасочного покрытия. Машинки с малым ходом обычно только полируют лакокрасочное покрытие и не врезаются в него, и поэтому они не пригодны для устранения поверхностных дефектов.
[0011] Один из способов устранения недостатков малого хода заключается в повышении частоты вращения электродвигателя. И хотя частота вращения электродвигателя увеличивается, ход машинки остается прежним. При этом с повышением частоты вращения электродвигателя и увеличением числа ОРМ для подошвы возникают проблемы, связанные с уменьшением срока службы машинки. Повышение частоты вращения увеличивает нагрузку на электродвигатель, а увеличение числа ОРМ способствует более быстрому прожогу подошвы.
[0012] Обобщая вышеизложенное, можно сказать, что машинки как с большим ходом, так и с малым ходом занимают свою нишу в данной области техники. Следовательно, существует потребность в машинке, которая могла бы регулироваться пользователем без ее разборки или использования специальных инструментов. И, наконец, существует потребность в компактном, простом и эффективном способе регулировки хода машинки с учетом потребностей пользователя.
Краткое раскрытие настоящего изобретения
[0013] Согласно первому аспекту настоящего изобретения предложено устройство регулировки хода для эксцентриковой (орбитальной) машинки, содержащее корпус, характеризующийся центральной осью, и стенку, которая охватывает полость. В полости располагается, по меньшей мере, одно уравновешивающее устройство, выполненное с возможностью перемещения в указанной полости. В полости также располагается монтажный узел. Монтажный узел включает в себя механизм крепления рабочего органа. Регулятор хода соединяет, по меньшей мере, одно уравновешивающее устройство с монтажным узлом. Регулятор хода обеспечивает возможность перемещения уравновешивающего устройства и монтажного узла относительно друг друга таким образом, что расстояние между уравновешивающим устройством и монтажным узлом может плавно регулироваться. Это также обеспечивает как статическое, так и динамическое равновесие регулятора хода. Соответственно, это позволяет плавно регулировать радиус хода механизма крепления рабочего органа относительно центральной оси корпуса. Регулятор хода содержит регулировочное кольцо и кулачковый механизм. Регулировочное кольцо охватывает стенку корпуса. Регулировочное кольцо выполнено аксиально подвижным вдоль центральной оси. Кроме того, регулировочное кольцо выполнено с возможностью вращения вокруг центральной оси. Уравновешивающее устройство входит в зацепление с кулачковым механизмом для перемещения уравновешивающего устройства вследствие перемещения регулировочного кольца. Монтажный узел, содержащий стакан подшипника, входит в зацепление с кулачковым механизмом для перемещения монтажного узла вследствие перемещения регулировочного кольца. Механизм крепления рабочего органа дополнительно содержит несущую ось. Несущая ось проходит через корпус, стакан подшипника и заходит в уравновешивающее устройство. По меньшей мере, один подшипник охватывает несущую ось и, по меньшей мере, один подшипник располагается в отверстии стакана подшипника. С кулачковым механизмом взаимодействует запорный механизм в виде запирающей пластины. Запорный механизм фиксирует механизм крепления рабочего органа в требуемом положении. Кулачковый механизм дополнительно содержит, по меньшей мере, один язычок. По меньшей мере, один язычок заходит в паз, выполненный в ступице, для фиксации регулятора хода в заданном положении.
[0014] Согласно второму аспекту настоящего изобретения предложен способ регулировки хода эксцентриковой (орбитальной) машинки, включающий в себя подсоединение устройства регулировки хода. Он предусматривает использование устройства регулировки хода согласно настоящему изобретению для эксцентриковой (орбитальной) машинки, которое содержит корпус с центральной осью и стенку, охватывающую полость. В полости располагается, по меньшей мере, одно уравновешивающее устройство, выполненное с возможностью перемещения в указанной полости. В полости также располагается монтажный узел. Монтажный узел включает в себя механизм крепления рабочего органа. Регулятор хода соединяет, по меньшей мере, одно уравновешивающее устройство с монтажным узлом. Регулятор хода обеспечивает возможность перемещения уравновешивающего устройства и монтажного узла относительно друг друга таким образом, что расстояние между уравновешивающим устройством и монтажным узлом может плавно регулироваться. Это также обеспечивает как статическое, так и динамическое равновесие регулятора хода. Соответственно, это позволяет плавно регулировать радиус хода механизма крепления рабочего органа относительно центральной оси корпуса. Регулятор хода выполнен аксиально подвижным относительно центральной оси корпуса. Регулятор хода также вращается вокруг центральной оси корпуса. Уравновешивающее устройство и монтажный узел смещаются относительно друг друга. Расстояние между уравновешивающим устройством и монтажным узлом плавно регулируется. Радиус хода механизма крепления рабочего органа плавно регулируется относительно центральной оси.
[0015] Прочие области применения заявленного изобретения станут очевидными из последующего описания. Описание и конкретные примеры осуществления настоящего изобретения, приведенные в этом разделе, носят исключительно иллюстративный характер и никоим образом не ограничивают объем настоящего изобретения.
Краткое описание чертежей
[0016] Чертежи, представленные в настоящем документе, предназначены исключительно для иллюстративного описания лишь некоторых, а не всех возможных вариантов осуществления заявленного изобретения, и не претендуют на ограничение объема настоящего изобретения.
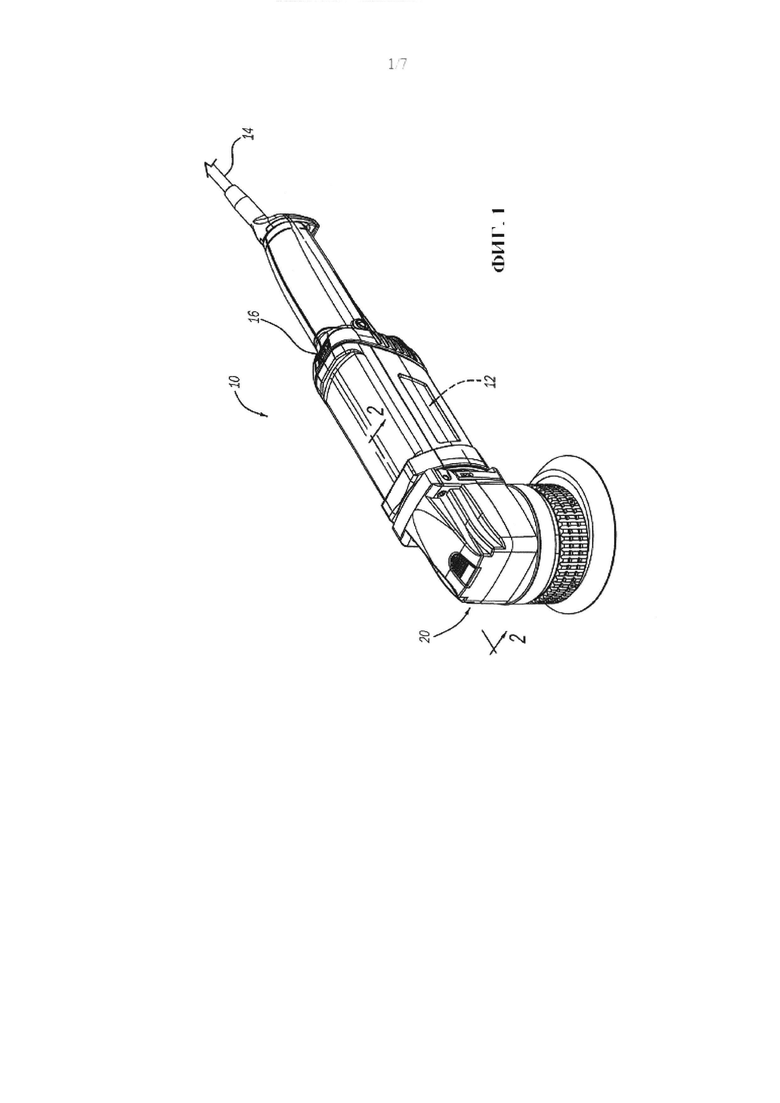
[0017] На фиг. 1 показано перспективное изображение инструмента.
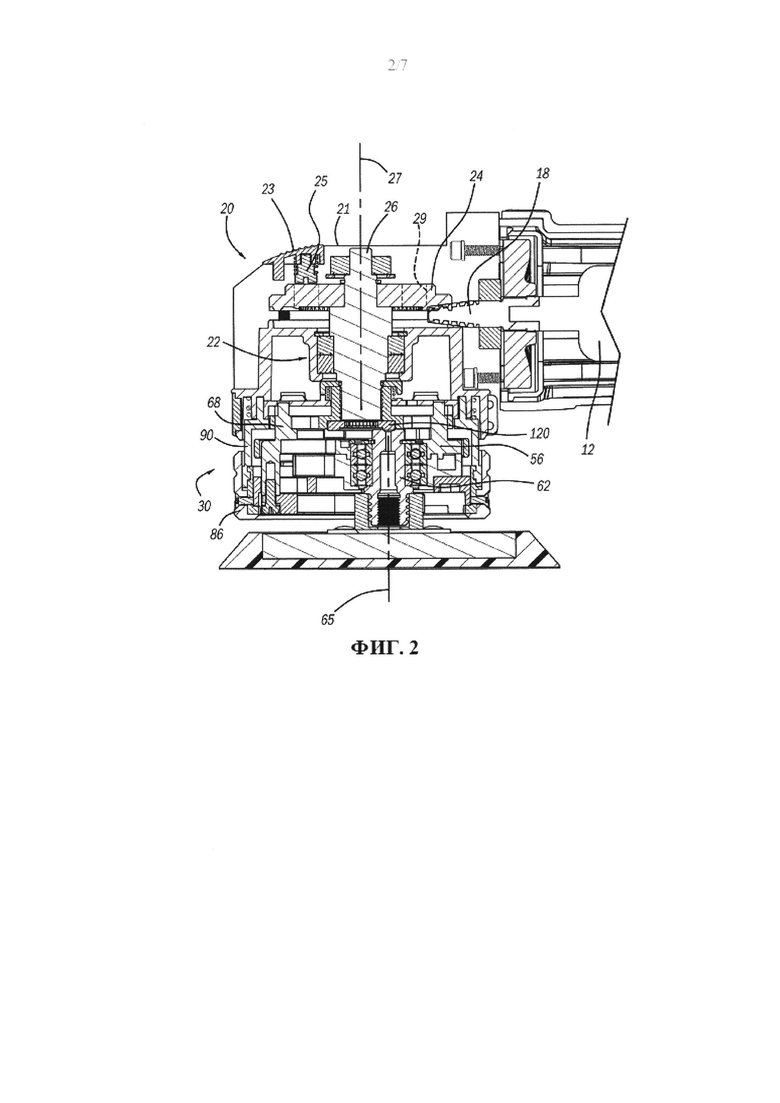
[0018] На фиг. 2 представлен поперечный разрез изображения, показанного на фиг. 1, который выполнен по линии 2-2.
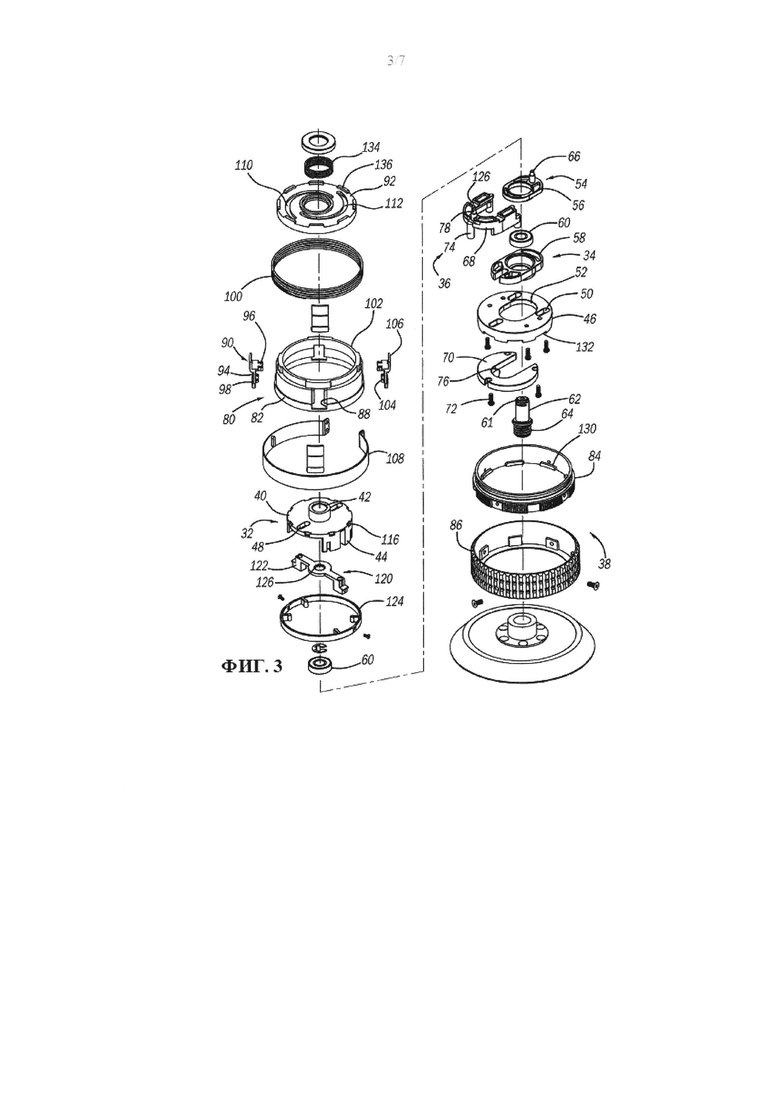
[0019] На фиг. 3 представлено покомпонентное изображение регулятора хода, показанного на фиг. 1.
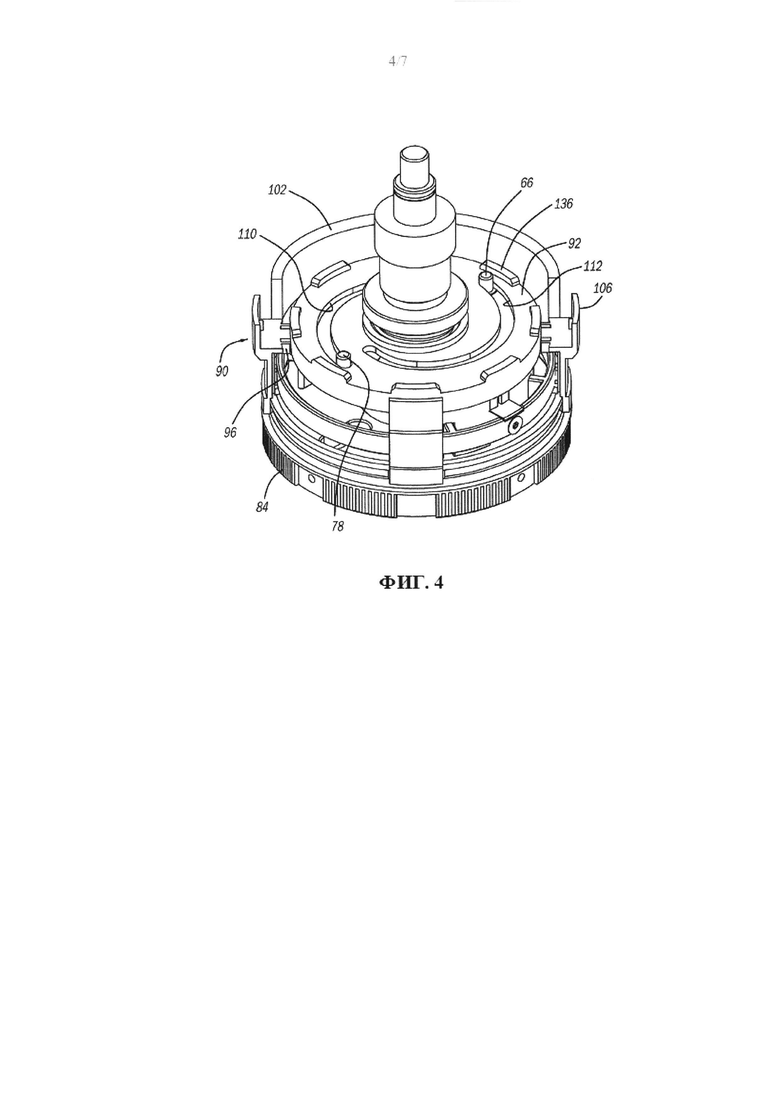
[0020] На фиг. 4 представлено частичное перспективное изображение регулятора хода.
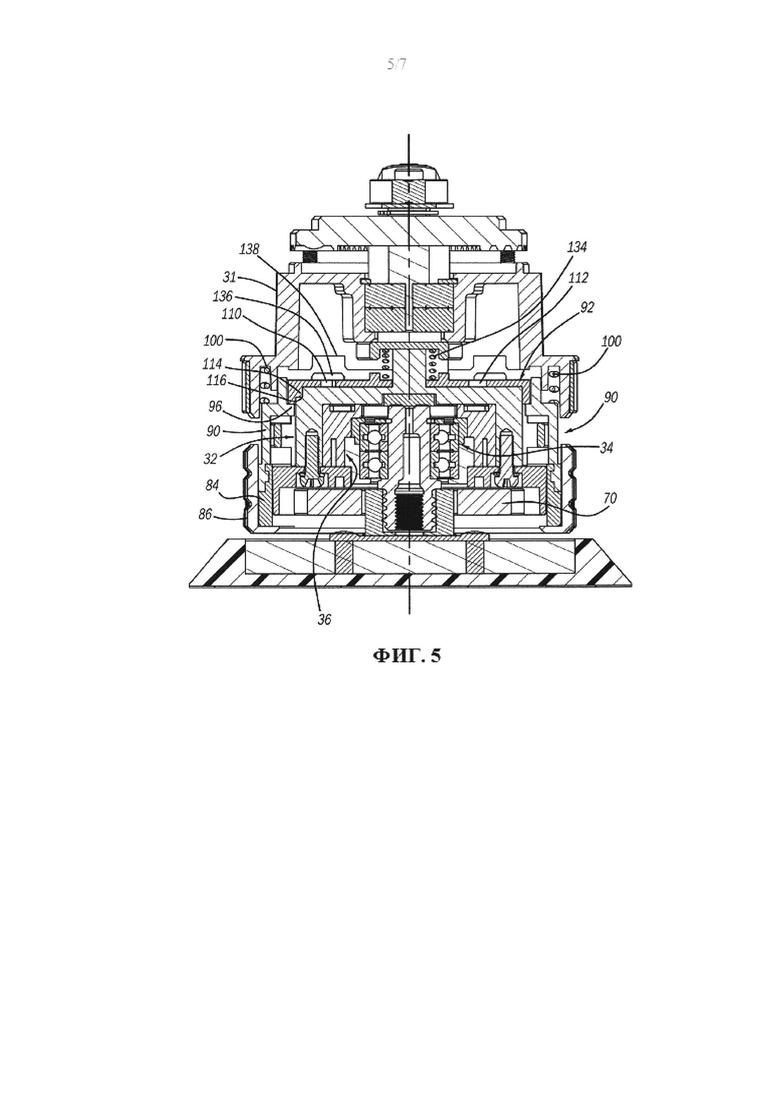
[0021] На фиг. 5 показан вид в частичном поперечном разрезе регулятора хода, установленного на инструменте в незацепленном положении.
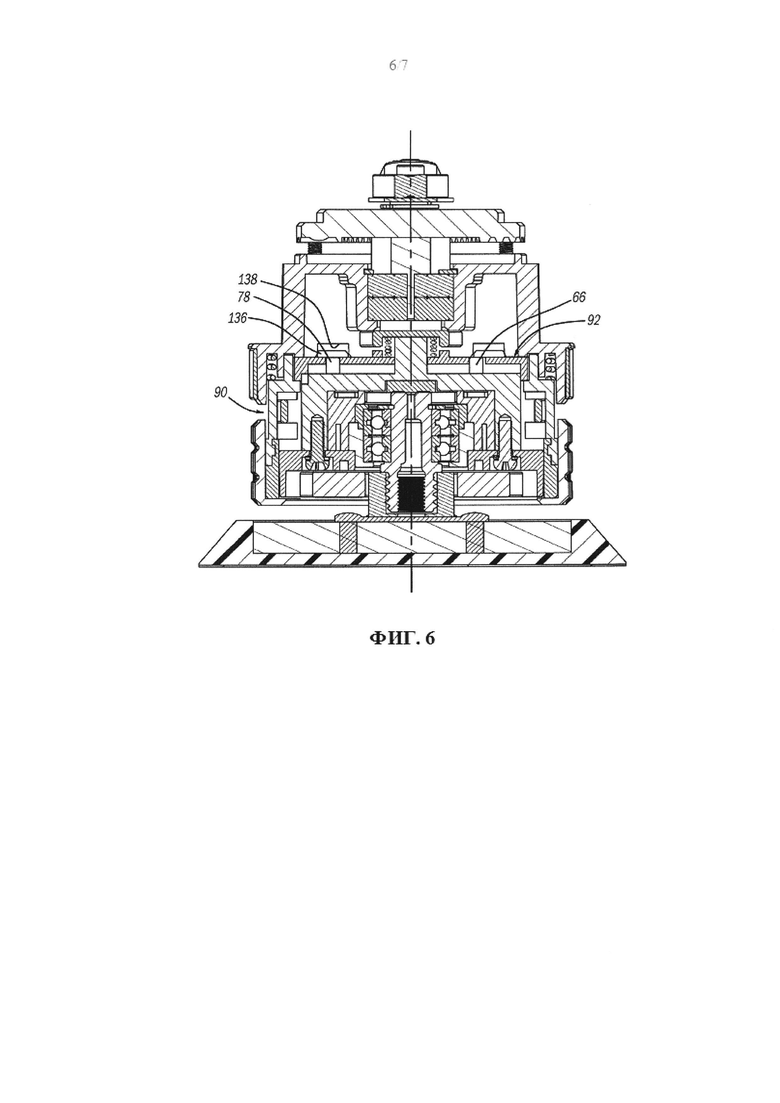
[0022] На фиг. 6 представлен вид, аналогичный виду, показанному на фиг. 5, но с регулятором хода в зацепленном положении.
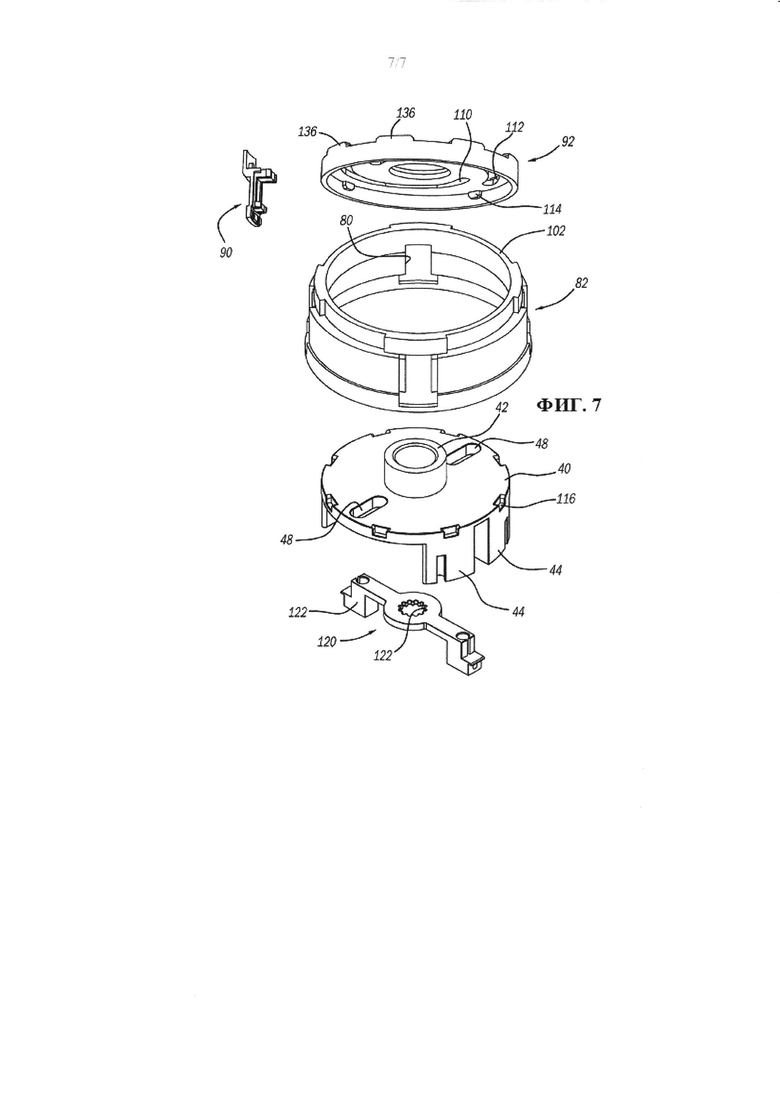
[0023] На фиг. 7 представлено покомпонентное перспективное изображение регулятора хода.
Подробное раскрытие настоящего изобретения
[0024] Примеры осуществления настоящего изобретения будут подробнее описаны ниже в привязке к прилагаемым чертежам.
[0025] На фигурах проиллюстрирован инструмент, который снабжен устройством регулировки хода, и который обозначен позицией 10. Инструмент 10 содержит электродвигатель 12, источник 14 питания и переключатель 16 для активации и деактивации источника питания. Проиллюстрированный источник питания представлен в виде шнура, но он может быть также выполнен в виде перезаряжаемой аккумуляторной батареи. Электродвигатель содержит шестерню 18, которая располагается в корпусе 20 приводной головки. Корпус 20 приводной головки содержит полость для размещения приводного механизма 22. Приводной механизм 22 включает в себя зубчатую передачу 24, входящую в сцепление с шестерней 18 и вращающимся шпинделем 26. Корпус приводной головки включает в себя корпус 31 шпинделя и крышку 21. На крышке 21 предусмотрена нажимная кнопка 23. С нажимной кнопкой 23 соединен шпенек 25. Шпенек 25 входит в зацепление с отверстием 29 в зубчатой передаче 24, блокируя вращение приводного механизма 22. Регулятор 30 хода свободно вращается на шпинделе 26 и соединен с нижней частью корпуса 20 приводной головки.
[0026] Регулятор 30 хода содержит приводную ступицу 32, монтажный узел 34 рабочего органа, уравновешивающее устройство 36 и устройство 38 регулировки хода. Приводная ступица 32 включает в себя корпус 40 приводной ступицы с патрубком 42 и выступающими ножками 44. Патрубок 42 отходит от одной стороны корпуса 40 приводной ступицы, тогда как ножки 44 отходят от другой его стороны. Патрубок 42 снабжен резьбой для подсоединения шпинделя 26. Посредством резьбовых крепежных деталей с ножками 44 соединяется несущий диск 46. Корпус 40 приводной ступицы содержит множество пазов 48, которые обеспечивают соединение с уравновешивающим устройством 36 и монтажным узлом 34 рабочего органа, что подробнее описано ниже. Кроме того, несущий диск 46 содержит множество пазов 50, которые обеспечивают соединение с уравновешивающим устройством 36. Несущий диск 46 также содержит отверстие 52 эллиптической формы, в которое частично заходит монтажный узел 34 рабочего органа. Таким образом, вращение шпинделя 26 передается приводной ступице 32 для приведения в действие регулятора 30 хода.
[0027] Монтажный узел 34 рабочего органа включает в себя держатель 54. Держатель 54 состоит из первой части 56 держателя и второй части 58 держателя. Части 56 и 58 держателя характеризуются наличием отверстий для размещения подшипников 60. Через подшипники 60 проходит шпиндель 62, который удерживается держателем 54. Шпиндель 62 выполнен с возможностью вращения в подшипниках 60. Кроме того, шпиндель 62 содержит резьбовой наконечник 64, который позволяет закрепить на шпинделе 62 рабочий орган, такой как подошва или иной элемент подобного рода. Шпиндель 62 проходит через отверстие 52, предусмотренное в несущем диске 46. Первая часть 56 держателя содержит штырек 66, который проходит через паз 48 в корпусе 40 приводной ступицы. Штырек 66 соединяется с устройством 38 регулировки хода, что подробнее описано ниже.
[0028] Уравновешивающее устройство 36 состоит из рамы 68 и уравновешивающего кольца 70. Уравновешивающее кольцо 70 закреплено на раме 68 с помощью крепежных деталей 72. И рама 68, и уравновешивающее кольцо 70 имеют, в общем, U-образную форму. Рама 68 содержит множество штырьков 74, которые проходят через каналы 50 в несущем диске 46. Таким образом, уравновешивающее кольцо 70 соединяется с несущим диском 46 с его нижней стороны. Кроме того, уравновешивающее кольцо 70 содержит паз или канал 76, через который может проходить шпиндель 64. Рама 68 уравновешивающего устройства также содержит штырек 78. Штырек 78 проходит через паз 48 в корпусе 40 приводной ступицы.
[0029] Устройство 38 регулировки хода содержит кулачковый механизм 92 и корпус 80, заключающий в себе приводную ступицу 32, монтажный узел 34 рабочего органа и уравновешивающее устройство 36. Корпус 80 состоит из гильзы 82, кольца 84 и захватной втулки 86. Захватная втулка 86 соединяется с кольцом 84, которое - в свою очередь -соединяется с гильзой 82, причем все эти элементы имеют цилиндрическую форму и обеспечивают возможность аксиального перемещения устройства 38 регулировки хода по оси 27 шпинделя, а также возможность его вращения вокруг оси шпинделя 26.
[0030] Гильза 82 содержит множество пазов 88 под язычки 90. Язычки 90 входят в контакт с кулачковым механизмом 92. Язычки 90 имеют тело 94 ступенчатой формы. Выступающая часть 96 заходит под кулачковый механизм 92. Это позволяет язычкам 90 толкать кулачковый механизм 92 в сторону от несущего диска 46, вводя его в зацепление с корпусом 31 шпинделя. Под выступающей частью 96 проходит канал 98. В канал 98 заходит виток пружины 100 для установки пружины 100 и язычков 90 в требуемое положение относительно гильзы 82. Гильза 82 характеризуется наличием окружного участка 102 меньшего диаметра под пружину 100. Выступающая часть 96 язычка 90 содержит уступ 104, заходящий в кольцо 84. Кроме того, язычок 90 содержит отходящий вверх участок 106, который проскальзывает в паз, предусмотренный в корпусе 20 приводной головки. С корпусом 20 приводной головки соединяется С-образное кольцо 108, закрывающее отходящие вверх участки 106 язычков, фиксируя устройство регулировки хода относительно корпуса 20 приводной головки.
[0031] Кулачковый механизм 92 содержит пару дуговидно-изогнутых пазов 110 и 112. В паз 110 заходит штырек 66 монтажного узла рабочего органа, а в дуговидно-изогнутый паз 112 заходит штырек 78 рамы уравновешивающего устройства. По мере вращения приводной ступицы 32 устройством 38 регулировки ходом штырьки 78 и 66 смещают уравновешивающее устройство 36 и монтажный узел 34 рабочего органа относительно друг друга. Это смещение приводит к перемещению оси 65 шпинделя 62 ближе к центральной оси 27 шпинделя 26 или дальше от нее. Это смещение также обеспечивает как статическое, так и динамическое равновесие регулятора хода.
[0032] На нижней стороне кулачкового механизма 92 предусмотрено множество язычков 114. Язычки 114 входят в пазы 116, выполненные в корпусе 40 приводной ступицы. Таким образом, в зависимости от положения шпинделя 62 относительно центральной оси 27 язычки 114 будут располагаться в разных пазах 116 ступицы, что позволяет менять положение шпинделя 62 относительно центральной оси 27.
[0033] К приводной ступице 32 примыкает мостиковый фиксатор 120 оси. Мостиковой фиксатор 120 оси содержит ножки 122, которые заходят в пазы между ножками 44 приводной ступицы. Таким образом, мостиковый фиксатор 120 располагается между ножками 44. Корпус 40 охватывается кольцом 124. Кольцо 124 содержит отверстия, позволяющие крепежным деталям проходить сквозь кольцо для закрепления мостикового фиксатора оси на приводной ступице 32. Мостиковой фиксатор 120 оси содержит отверстие 126 для приема верхней части 61 шпинделя 62. При осевом совмещении шпинделя 62 монтажного узла рабочего органа со шпинделем 26 привода верхняя часть 61 шпинделя 62 заходит в отверстие 126 мостикового фиксатора 120 оси, фиксируя шпиндель 62 в соосном положении. Это обеспечивает нулевое орбитальное или угловое положение регулятора 30 хода. Кроме того, мостиковый фиксатор 120 оси поджимается таким образом, что он приходит в состояние покоя в каналах 68 уравновешивающего устройства.
[0034] Указанный регулятор 30 хода функционирует следующим образом. Шпенек 25 нажимной кнопки входит в зацепление с отверстием 29 зубчатой передачи. Захватная втулка 86 толкается в направлении корпуса 20 приводной головки. При этом язычки 90 сжимают пружину 100. Выступающая часть 96 язычков поднимает кулачковый механизм 92 так, что язычки 114 кулачкового механизма выходят из зацепления с пазами 116 ступицы. Отходящие вверх выступы 136, расположенные на верхней поверхности кулачкового механизма 92, входят в пазы 138 в корпусе 131 шпинделя. Это обеспечивает фиксацию кулачкового механизма 92 на месте.
[0035] Захватная втулка 86 соединяется с кольцом 84, которое - в свою очередь - соединяется с приводной ступицей 32. Выступы 130 на кольце входят в зацепление с пазами 132 несущего диска 46. По мере вращения захватной втулки 86 начинает вращаться приводная ступица 32. При этом штырьки 78 и 66 в дуговидно-изогнутых пазах 112 и 110 смещаются относительно друг друга. По мере смещения относительно друг друга штырьков 78 и 66 происходит смещение относительно друг друга уравновешивающего устройства 36 и монтажного узла 34 рабочего органа, вследствие чего шпиндель 62 смещается относительно центральной оси 27 шпинделя 26. Это обеспечивает плавное регулирование хода указанного регулятора 30 хода. Ход регулируется в диапазоне от истинного углового положения до максимального орбитального положения.
[0036] После задания пользователем требуемого положения пользователь высвобождает захватную втулку 86. Пружина 134 кулачкового механизма смещает кулачковый механизм 92 обратно в зацепление с корпусом 40 ступицы. Пружина 100 поджимает язычки 90 к несущему диску 46. Таким образом, язычки 114 кулачкового механизма повторно входят в зацепление с пазами 116 в корпусе ступицы, фиксируя уравновешивающее устройство 36 и монтажный узел 34 рабочего органа в требуемом положении относительно друг друга. Таким образом, активация переключателя 16 инициирует вращение шпинделя 26, который - в свою очередь - инициирует вращение шпинделя 62 регулятора 30 хода. Уравновешивающее устройство 36 вместе с монтажным узлом 34 рабочего органа уравновешивает, как статически, так и динамически, разбалансировку при вращении, обусловленную смещением шпинделя 62 относительно центральной оси 27 шпинделя 26. Таким образом, шпиндель 62 вращает рабочий орган с его движением по круговой орбите со смещением в сторону от центральной оси 26.
[0037] Предшествующее описание вариантов осуществления настоящего изобретения представлено исключительно в ознакомительных и иллюстративных целях. Оно не претендует на исчерпывающий характер и ограничение объема заявленного изобретения. Отдельные элементы или признаки какого-либо конкретного варианта осуществления настоящего изобретения, в общем, не ограничены этим конкретным вариантом, но в применимых случаях являются взаимозаменяемыми и могут быть использованы в каком-либо выборочном варианте осуществления настоящего изобретения, даже если они специально не описаны и не проиллюстрированы. Равным образом, в варианты осуществления настоящего изобретения могут быть внесены различные изменения. Указанные изменения не должны расцениваться как отклонение от изобретения; и предполагается, что все подобные модификации входят в объем заявленного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для резки материалов неправильной формы,преимущественно полупроводниковых | 1974 |
|
SU523802A1 |
| Регулировочный блок для регулировки по азимуту и/или для регулировки угла атаки ветроэнергетической установки, соответствующие устройства регулировки с таким регулировочным блоком, ветроэнергетическая установка, способ регулировки роторной лопасти, способ отслеживания направления ветра, а также применение регулировочного блока | 2018 |
|
RU2732083C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| Устройство для доводки плоских кольцевых поверхностей клиновых задвижек | 1990 |
|
SU1743836A1 |
| БИ БЛ ИО Т Е !\Л | 1973 |
|
SU372393A1 |
| Устройство для изготовления изделий из проволоки | 1976 |
|
SU735367A1 |
| Соединительный узел вала роторабуРОВОгО CTAHKA | 1979 |
|
SU846707A1 |
| Устройство для полирования деталей | 1986 |
|
SU1335432A1 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| Устройство для регулировки выжимных подшипников | 2021 |
|
RU2776631C1 |
Группа изобретений относится к обработке материалов резанием и может быть использована в регулируемых орбитальных устройствах, в частности полировальных и шлифовальных машинках и массажерах. Устройство регулировки хода содержит корпус с центральной осью и стенку, охватывающую полость. В полости расположено по меньшей мере одно уравновешивающее устройство, выполненное с возможностью перемещения в указанной полости, и монтажный узел, который содержит механизм крепления рабочего органа. Регулятор хода соединяет по меньшей мере одно уравновешивающее устройство с монтажным узлом. Регулятор хода обеспечивает возможность перемещения уравновешивающего устройства и монтажного узла относительно друг друга из условия плавного регулирования расстояния между уравновешивающим устройством и монтажным узлом, обеспечивающего плавное регулирование радиуса хода механизма крепления рабочего органа относительно центральной оси корпуса. Обеспечивается плавное регулирование хода орбитальной эксцентриковой машинки с учетом потребностей пользователя. 2 н. и 7 з.п. ф-лы, 7 ил.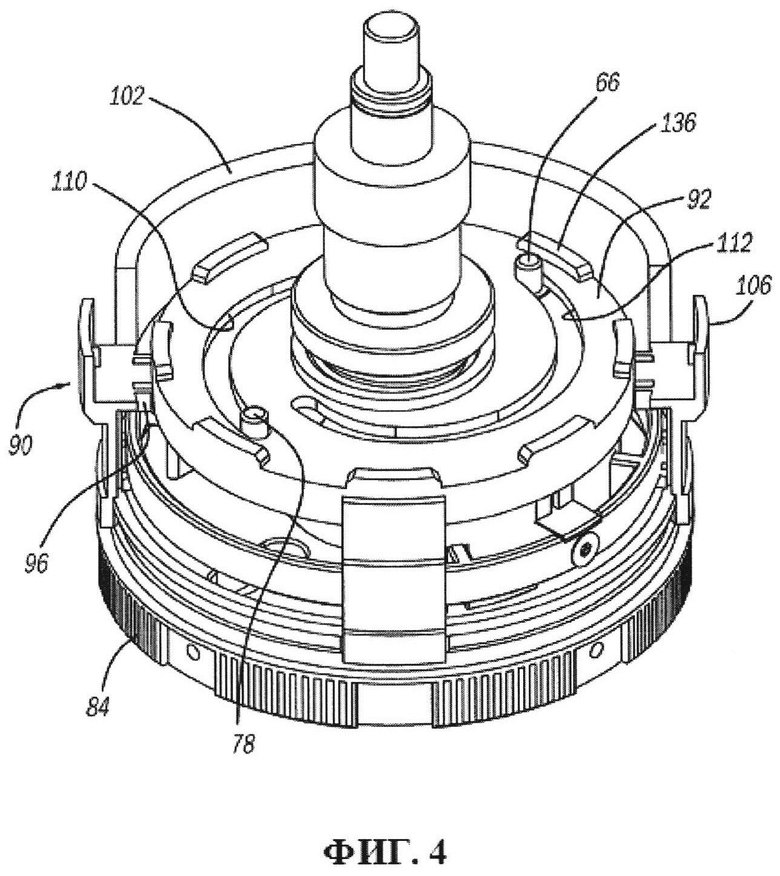
1. Устройство регулировки хода для эксцентриковой орбитальной машинки, содержащее:
корпус с центральной осью и стенку, охватывающую полость;
по меньшей мере одно уравновешивающее устройство, расположенное в полости с возможностью перемещения;
монтажный узел, расположенный в полости, при этом монтажный узел содержит механизм крепления рабочего органа,
регулятор хода, соединяющий по меньшей мере одно уравновешивающее устройство с монтажным узлом и обеспечивающий возможность перемещения уравновешивающего устройства и монтажного узла относительно друг друга таким образом, что расстояние между уравновешивающим устройством и монтажным узлом может плавно регулироваться с обеспечением плавного регулирования радиуса хода механизма крепления рабочего органа относительно центральной оси корпуса, и
регулировочное кольцо, охватывающее стенку корпуса, причем оно выполнено аксиально подвижным вдоль центральной оси и с возможностью вращения вокруг центральной оси для обеспечения перемещения уравновешивающего устройства и монтажного узла.
2. Устройство регулировки хода по п. 1, отличающееся тем, что оно включает кулачковый механизм.
3. Устройство регулировки хода по п. 2, в котором уравновешивающее устройство входит в зацепление с кулачковым механизмом для перемещения уравновешивающего устройства вследствие перемещения кулачкового механизма.
4. Устройство регулировки хода по п. 2, в котором монтажный узел содержит стакан подшипника, входящий в зацепление с кулачковым механизмом для перемещения монтажного узла вследствие перемещения кулачкового механизма.
5. Устройство регулировки хода по п. 1, в котором механизм крепления рабочего органа дополнительно содержит шпиндель, причем указанный шпиндель проходит через корпус, стакан подшипника и заходит в уравновешивающее устройство.
6. Устройство регулировки хода по п. 5, которое содержит по меньшей мере один подшипник, охватывающий шпиндель, и по меньшей мере один подшипник, расположенный в отверстии стакана подшипника.
7. Устройство регулировки хода по п. 2, которое содержит запорный механизм, взаимодействующий с кулачковым механизмом для фиксации механизма крепления рабочего органа в заданном положении.
8. Устройство регулировки хода по п. 7, в котором кулачковый механизм дополнительно содержит по меньшей мере один язычок, при этом указанный язычок входит в зацепление с пазом в ступице для блокировки регулятора хода.
9. Способ регулировки хода эксцентриковой орбитальной машинки, включающий
соединение устройства регулировки хода с эксцентриковой орбитальной машинкой, причем указанное устройство регулировки хода содержит:
корпус с центральной осью и стенку, охватывающую полость;
по меньшей мере одно уравновешивающее устройство, расположенное в корпусе с возможностью перемещения,
монтажный узел, расположенный в корпусе, при этом монтажный узел содержит механизм крепления рабочего органа и
регулятор хода, соединяющий по меньшей мере одно уравновешивающее устройство с монтажным узлом, причем устройство регулировки хода включает в себя регулировочное кольцо, охватывающее стенку корпуса и выполненное аксиально подвижным вдоль центральной оси и с возможностью вращения вокруг центральной оси;
настройку регулятора хода;
перемещение уравновешивающего устройства и монтажного узла относительно друг друга;
плавное регулирование расстояния между уравновешивающим устройством и монтажным узлом, и
плавное регулирование радиуса хода механизма крепления рабочего органа относительно центральной оси корпуса.
| EP 3162499 А2, 03.05.2017 | |||
| US 20060189267 A1, 24.08.2006 | |||
| US 5947804 A1, 07.09.1999 | |||
| 0 |
|
SU158675A1 | |
| РУЧНОЙ ПРИБОР И СОЕДИНЯЕМЫЕ С НИМ ИНСТРУМЕНТЫ (ВАРИАНТЫ) | 2007 |
|
RU2415639C2 |

