Изобретение относится к области акустической разведки и может быть использовано в разведывательно-сигнализационных комплексах и системах тактического и оперативно-тактического назначения для раннего предупреждения о возможной высадке десанта транспортно-десантными вертолётами или огневого налёта ударных вертолётов противника.
Операции предлагаемого способа используются в рабочем алгоритме акустического датчика сразу после факта обнаружения воздушного объекта. Поэтому ниже при анализе аналогов и прототипа будет анализироваться данная составляющая способов, используемых в них.
Во многих случаях для обнаружения и классификации вертолётов используется активная радиолокация, например, [1].
Достаточно распространены и варианты использования пассивной акустики, например [2, 3].
В первом случае в качестве примера приведём достаточно распространённый в различных вариантах способ классификации, основанный на анализе отражений зондирующего радиосигнала от лопастей несущего винта (НВ) летательного аппарата. Так как период вращения лопастей является отличительной характеристикой вертолета, то на основании установленного периода вращения винтов вертолета производится классификация летательного аппарата (определение модели вертолета). Здесь используются достаточно стандартные операции, такие как фильтрация сигналов, дискретизация с заданной частотой, быстрое преобразование Фурье (БПФ), череспериодное вычитание. Когда остаётся только лишь сигнал, отражённый от лопастей НВ, он сравнивается с порогом определённой величины. По количеству надпороговых пиков, устанавливают период амплитудной модуляции сигнала, который сравнивается с данными, хранящимися в базе (банке) данных. Результатом сравнения и будет являться определение класса вертолёта. Основными недостатками данного способа можно считать то, что он является активным, следовательно, обнаруживаемым с возможностью подавления в процессе приёма отражённых волн. Кроме того, необходимо компенсировать составляющую сигнала, отражённую от корпуса вертолёта, что достигается пятикратной системой череспериодного вычитания. Также на излучение зондирующих сигналов расходуется достаточно большое количество энергии.
Что касается пассивной акустики, то способы, использующие её, лишены этих недостатков. Известно, что при полете вертолета его акустический сигнал складывается из шума двигателя и шума НВ. Современные вертолеты России и США в подавляющем большинстве имеют газотурбинные двигатели. В составе излучаемого несущим винтом шума различают вихревой (или широкополосный) шум, шум вращения лопастей и хлопки лопастей (флаттер). Наиболее сильный шум несущего винта создают хлопки лопастей (если они есть). За ними следует вихревой шум, а затем шум вращения лопастей. При этом максимум интенсивности шума вращения лопастей попадает на весьма низкие частоты, так что они могут вообще не попадать в слышимый диапазон. Но надо иметь ввиду, что низкочастотный шум хорошо распространяется в атмосфере, тогда как высокие гармоники быстрее затухают по удалении от вертолета. В связи с этим варианты способов обнаружения и классификации вертолётов всегда соответствуют тому, с какими шумами связаны операции над акустическими сигналами в этих способах. Например, случай [2] относится к традиционному варианту распознавания класса воздушной винтовой цели, включая винтокрылые дроны и вертолёты, с использованием пассивной акустики. Операции данного способа над акустическим сигналом обнаруженного воздушного объекта позволяют получать сигнатуры данного объекта в частотной области. Затем осуществляют сравнение полученных сигнатур с аналогичными сигнатурами различных классов подобных воздушных объектов, хранящихся в базах (банках) данных. Результатом сравнения будет отнесение обнаруженного воздушного объекта к тому классу, сигнатуры которого из банка данных наиболее близки к полученным данным способам сигнатурам от обнаруженного воздушного объекта.
Одним из основных недостатков данного способа является необходимость хранения большого количества частотных сигнатур, а также связанные с этим временные и энергетические затраты на проведение сравнения полученных сигнатур с хранящимися в банках данных.
Разработаны также способы, не имеющие этих недостатков. В частности, способ, описанный в [3], использует нейросеть, адаптируя её к скорости движения воздушного объекта на основании оценочных характеристик спектров выходных реализаций акустических сигналов. Так, при изменении скорости движения воздушного объекта происходит изменение частоты вращения турбины, винтов, вала и т.д. Результирующий сигнал рассматривают как сигнал с изменяющимся масштабом времени в α раз. При этом среднее число пересечений нулевого уровня в единицу времени стационарным нормальным процессом также должно измениться в α раз. Тогда при оценке вектора распределения длительностей интервалов между нулями и получении необходимых инвариантных к частоте характеристик акустического сигнала при измерении этих длительностей изменяют тактовую частоту в соответствии с числом α. Коэффициенты масштабирования по времени вычисляются для каждого класса объектов на основании оценки средней частоты флуктуации в реализации входного сигнала за время, необходимое для адаптации алгоритма к скорости движения цели. Мерой принадлежности принимаемого сигнала к классу объекта является уровень сигнала. Таким образом, используя в качестве информативного признак в виде длительности интервалов между нулями и обеспечивая тем самым инвариантность к уровню сигнала на входе, применяют адаптацию к скоростям движения целей, позволяющую изменить масштаб времени спектра входного сигнала, что ускоряет процесс распознавания объекта, а также расширяет круг распознаваемых объектов.
Основным недостатком данного способа является достаточно сложная обработка с большим количеством операций, а также достаточно жёсткие требования к параметрам фильтров и автоматической регулировки усиления при реализации данного способа.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [7], принятый за прототип.
Способ-прототип заключается в следующем.
В отсутствие летательных аппаратов (ЛА) в зоне чувствительности акустических датчиков.
1. Измерение скорости ветра специальным датчиком.
2. Определение на основе измеренной скорости ветра реального значения дисперсии атмосферных шумов
 ,
,
где V – измеренная скорость ветра.
3. С учетом найденного значения реальной дисперсии оценка текущего значения порога обнаружения ЛА и оценка численного значения нижней частоты фильтрации акустических сигналов.
При наличии ЛА в зоне чувствительности акустических датчиков.
4. Многоканальный прием акустического излучения от ЛА
 ,
,
где x(t) - акустический сигнал от ЛА; ξ(t) - аддитивный акустический фон; А - параметр, определяющий наличие или отсутствие ЛА в зоне обзора (А=1 – ЛА есть, А=0 - ЛА нет).
5. Усиление принятых акустических сигналов.
6. Дискретизация усиленных сигналов с заданной частотой

где xi – значение сигнала от ЛА в i-м отсчёте входного сигнала;  - значение аддитивного акустического фона в i-м отсчёте входного сигнала;
- значение аддитивного акустического фона в i-м отсчёте входного сигнала;  - значение собственного шума в i-м отсчёте входного сигнала; n – размер обрабатываемой реализации принятого сигнала.
- значение собственного шума в i-м отсчёте входного сигнала; n – размер обрабатываемой реализации принятого сигнала.
7. Фильтрация дискретизированных сигналов каждого канала в диапазоне акустического спектра излучений ЛА;
8. Отбор сигнала корреляции, превысившего порог обнаружения
 и Zmax > Zпор.
и Zmax > Zпор.
9. Получение методом быстрого преобразования Фурье (БПФ) спектральной характеристики сигнала, превысившего порог обнаружения.
10. Сравнение полученного спектра с библиотекой спектров ЛА и принятие решения об обнаружении ЛА конкретного класса.
11. Текущее измерение скорости ветра специальным датчиком.
12. Текущее определение на основе измеренной скорости ветра реального значения дисперсии атмосферных шумов.
13. На основе текущего значения дисперсии расчёт и введение поправки в численное значение нижней частоты фильтрации акустических сигналов, а также в численное значение порога обнаружения ЛА.
В качестве основного недостатка способа-прототипа можно указать на то, что за счёт датчика скорости ветра присутствует аппаратное усложнение. Также есть необходимость в хранении достаточно большого количества частотных сигнатур ЛА, следовательно, будут временные и энергетические затраты на их поиск в банках данных и сравнение с полученными при осуществлении операций способа.
Задача предлагаемого способа – повышение эффективности классификации при упрощении реализации способа и существенной экономии энергетического, временного и аппаратного ресурсов.
Для решения поставленной задачи в способе классификации вертолётов с одним несущим винтом на режиме горизонтального полёта, включающем регистрацию акустического сигнала, возбуждаемого вращением лопастей несущего винта, его фильтрацию в обоснованно выбранной общей полосе частот, усиление и дискретизацию с заданной частотой, быстрое преобразование Фурье сигнала на секундных интервалах, согласно изобретению, осуществляется цифровая фильтрация в трёх полосах рабочих частот, лежащих внутри общей полосы частот с оценкой текущих секундных отсчётов энергии сигнала в этих полосах; в каждой из частотных полос осуществляется оценка величины двадцатисекундного накопления энергетических отсчётов и формирование функций сравнения, с использованием этих текущих величин и шумовых порогов, периодически обновляемых для каждой из полос; с использованием функций сравнения для каждой полосы частот осуществляется формирование текущих отсчётов соотношения, являющегося критерием принадлежности обнаруженного вертолёта к тому классу, в полосе частот которого величина текущих отсчётов критерия равна единице.
Аппаратура разведывательно-сигнализационных комплексов устанавливается скрытно в тактической или оперативно-тактической глубине за линией соприкосновения с противником. Одной из задач этой аппаратуры является обнаружение и классификация вертолётов противника, пролетающих над ней или рядом с ней в сторону наших позиций, а также скрытая передача сообщения о данном событии с целью предупреждения о возможных последствиях. Таким образом, необходимо определить к какому классу относятся вертолёты, летящие горизонтально с примерно постоянной скоростью, то есть на режиме горизонтального полёта.
Для понимания дальнейшего необходимо рассмотреть некоторые результаты теории вертолёта с учётом их практического использования, которые приведены в [4...6]. Очень важно, что наличие шарнирного крепления лопастей НВ вызывает образование так называемого конуса вращения (тюльпана) вследствие того, что под действием подъёмных сил лопасти отклоняются относительно горизонтального шарнира и поднимаются над плоскостью вращения втулки. Кроме того, за счёт маховых движений выравниваются подъёмные силы лопастей в разных азимутах, что даёт возможность устранить опрокидывание и кабрирование вертолёта при поступательном движении. При этом комлевые сечения лопастей разгружаются от действия больших изгибающих моментов, которые возникают при жёстком креплении лопастей. Совершенно очевидно, что частота взмахов каждой лопасти НВ в вертикальной плоскости определяется величиной окружной скорости её конца и диаметром НВ. На двух противоположных азимутах каждая лопасть делает по взмаху: вверх и вниз. Следовательно, за промежуток времени, за который все лопасти НВ сделают полный оборот в 360º, они сделают по два взмаха. Таким образом, индуктивная скорость уходящей струи под винтом будет модулироваться с частотой, которая пропорциональна числу лопастей НВ. Так как взмах лопасти вверх приводит к торможению уходящей струи воздуха, а взмах вниз – к её ускорению, то это эквивалентно созданию с такой же частотой дополнительных уплотнений и разрежений воздуха в уходящей струе под НВ. Так генерируется акустическое колебание, параметры которого несут информацию, связанную с аэродинамическими характеристиками вертолёта. Этот факт можно использовать в качестве исходного для решения сформулированной задачи.
Для оценки силы тяги лопастей НВ на режиме горизонтального полёта используется соотношение
 . (1)
. (1)
Здесь R = D/2 – радиус ометаемой НВ площади (длина лопастей); D – соответственно её диаметр; u(t) = ω(t)·R = 2π·f(t)·R – окружная скорость конца лопасти НВ; ρ – плотность воздуха, кг/м3; Ст – так называемый коэффициент тяги или коэффициент полной аэродинамической силы лопасти.
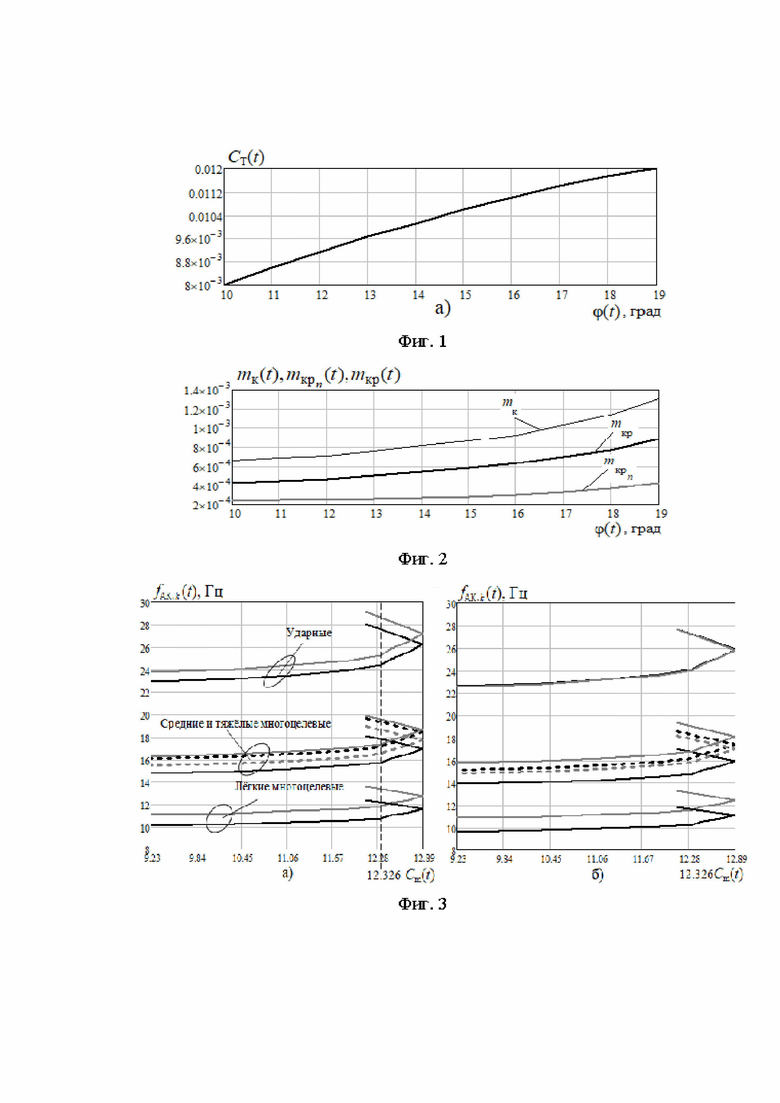
Величина коэффициента тяги определяется шагом винта, а точнее – установочным углом элементов лопастей. В соответствующей литературе эти понятия часто используют как синонимы. На фиг. 1 представлена зависимость коэффициента тяги от установочного угла φ (шага винта) с учётом того, что в подавляющем большинстве ситуаций величина Ст(t) не выходит за пределы диапазона значений 0.008…0.012. Шаг винта теоретически (геометрически) определяет путь Н, который прошёл бы винт в осевом направлении за один оборот, если бы он ввинчивался в воздух, как в гайку. Из развёртки пути, пройденного за один оборот концом лопасти при постоянном по её размаху угле установки, следует
 или
или  , (2)
, (2)
Лопасти винтов имеют переменный по размаху угол установки φ (аэродинамическая и геометрическая крутка). Поэтому условно шагом винта называют шаг расчётного сечения лопасти, отстоящего от оси вращения на расстоянии от 70% до 75% размаха лопасти.
Далее воспользуемся первым из шести условий горизонтального полёта вертолёта – условием постоянства высоты
F г = Fв = mв·g, (3)
где Fв - сила тяги НВ на режиме висения; mв - масса вертолёта; g = 9.81 м/с2 – ускорение свободного падения.
Подставим (3) в (1) и получим соотношение для окружной скорости конца одной лопасти НВ
 . (4)
. (4)
Тогда частота вращения одной лопасти НВ составит
f(t) = u(t)/2πR. (5)
Однако, расчёты показывают: чтобы иметь НВ возможно большей тяги (при заданной подводимой к винту мощности) необходимо увеличивать его диаметр и уменьшать количество оборотов в секунду. Для конкретного НВ сила тяги с увеличением количества оборотов в секунду возрастает, но для этого требуется увеличение подводимой мощности. Оптимальное управление вертолётом должно ответить на вопрос: какие условия и факторы сопутствуют оптимальному количеству оборотов НВ в секунду, то есть, что выгоднее – добиваться увеличения тяги путём увеличения числа оборотов НВ в секунду или путём увеличения шага винта? Как сохранить оптимальное число оборотов НВ в секунду при изменении силы тяги? На эти вопросы ответы получают с помощью введения удельной тяги НВ. Эта характеристика равна по величине отношению силы тяги, развиваемой НВ, к мощности, потребной для его вращения
 , где
, где  . (6)
. (6)
Здесь  - коэффициент крутящего момента;
- коэффициент крутящего момента;  - часть, зависящая от сил профильного сопротивления, то есть от состояния поверхности лопастей, формы лопастей и числа оборотов НВ в секунду;
- часть, зависящая от сил профильного сопротивления, то есть от состояния поверхности лопастей, формы лопастей и числа оборотов НВ в секунду;  - часть, зависящая от сил индуктивного сопротивления, то есть в основном от шага винта.
- часть, зависящая от сил индуктивного сопротивления, то есть в основном от шага винта.
На фиг. 2 представлены зависимости от шага винта коэффициента крутящего момента и его составляющих в тех же пределах угла установки, что и для коэффициента тяги.
На режиме горизонтального полёта при скорости вертолёта, мало отклоняющейся от постоянной, величина  . Таким образом, для увеличения удельной тяги
. Таким образом, для увеличения удельной тяги  надо уменьшать окружную скорость НВ
надо уменьшать окружную скорость НВ  , то есть снижать число оборотов НВ в секунду. А увеличивать её выгоднее за счёт увеличения шага винта Н при минимальном значении числа оборотов НВ в секунду. То есть, НВ выгодно вращать с малым числом оборотов в секунду, а его тягу увеличивать за счёт увеличения шага винта.
, то есть снижать число оборотов НВ в секунду. А увеличивать её выгоднее за счёт увеличения шага винта Н при минимальном значении числа оборотов НВ в секунду. То есть, НВ выгодно вращать с малым числом оборотов в секунду, а его тягу увеличивать за счёт увеличения шага винта.
С другой стороны, увеличение шага винта приводит к увеличению реактивного момента, следовательно, к увеличению потребной мощности. Значит, чтобы число оборотов НВ в секунду оставалось неизменным, надо при изменении шага винта одновременно изменить и подводимую к нему мощность, то есть несущим винтом и двигателем нужно управлять одновременно. Это осуществляется с помощью специального рычага, который называют ручкой «шаг-газ». На режиме горизонтального полёта со скоростью, мало отклоняющейся от постоянной, лётчик с помощью ручки «шаг-газ», используя показания приборов, так регулирует силу тяги НВ распределением мощности двигателя между подачей её для изменения шага винта и одновременного соответствующего изменения количества оборотов НВ в секунду, чтобы удерживать значение угла завала конуса вращения, наиболее выгодным для осуществления режима горизонтального полёта.
Ниже в таблице 1 в качестве примера для основных типов вертолётов с одним НВ (по паре вертолётов на тип) приведены те из технических характеристик, которые необходимы для проведения соответствующих оценок.
Таблица 1. Характеристики некоторых типов вертолётов
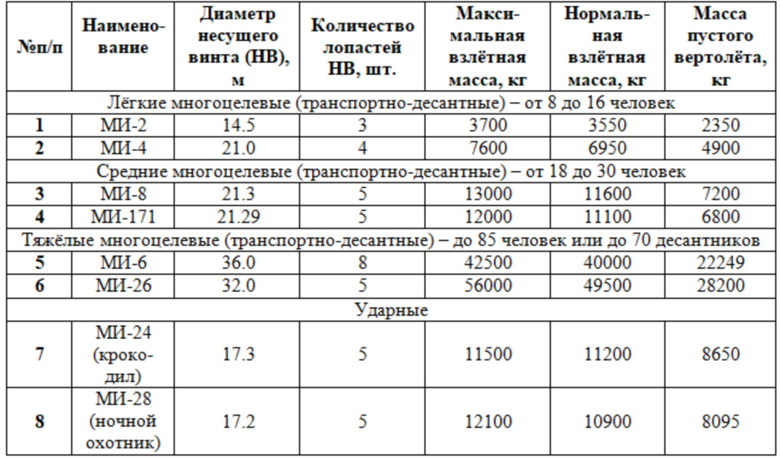
Следовательно, необходимо с использованием (4) и (5) построить зависимость частоты модулированной акустической волны, возбуждаемой лопастями НВ вертолёта k-го типа, от текущих значений величины  , чтобы найти вероятный диапазон изменения этой частоты на режиме горизонтального полёта вертолёта с учётом влияния управления его горизонтальным полётом. Для этого используем данные о технических характеристиках вертолётов с одним НВ, приведённые в таблице 1. На фиг. 3 представлены зависимости частоты акустической волны
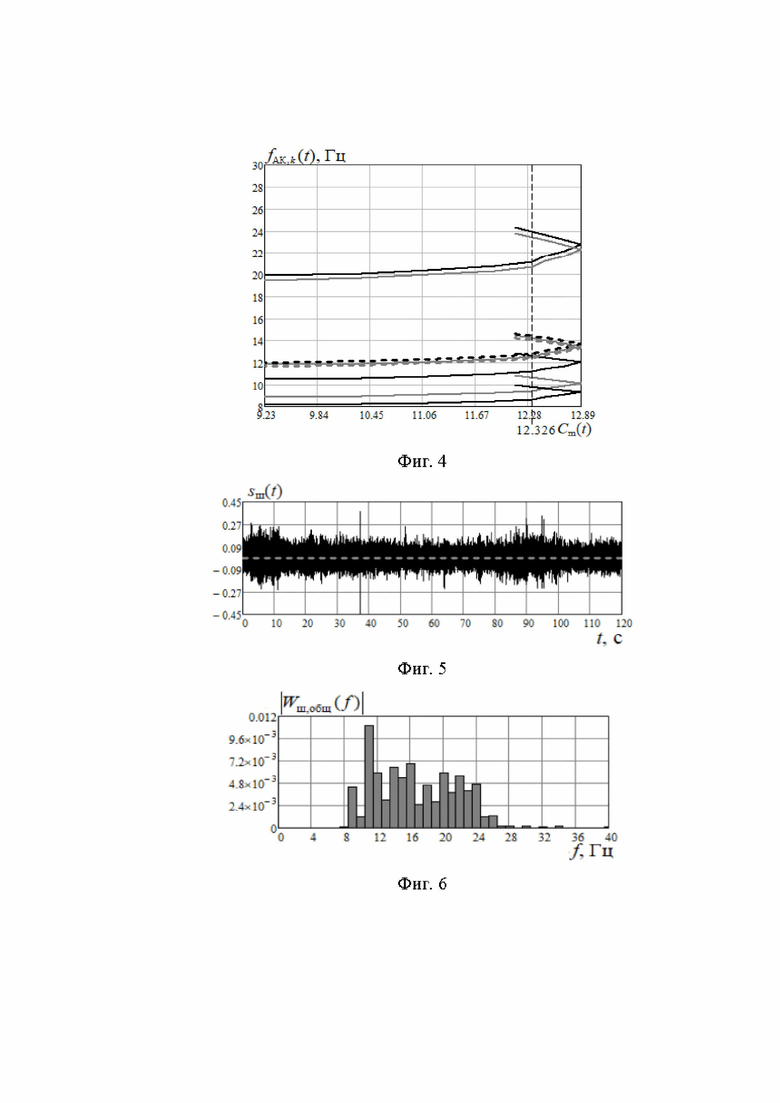
, чтобы найти вероятный диапазон изменения этой частоты на режиме горизонтального полёта вертолёта с учётом влияния управления его горизонтальным полётом. Для этого используем данные о технических характеристиках вертолётов с одним НВ, приведённые в таблице 1. На фиг. 3 представлены зависимости частоты акустической волны  , возбуждаемой взмахами лопастей НВ на режиме горизонтального полёта, от величины отношения, которая характеризует распределение мощности двигателя, затрачиваемой на изменение шага винта и изменение скорости вращения лопастей НВ: а) в случае максимальной загрузки вертолётов; б) в случае нормальной загрузки вертолётов. На этой иллюстрации вертикальные штриховые линии соответствуют условной границе, до которой удельная тяга меняется очень мало. Она характеризует переход от режима горизонтального полёта с постоянной скоростью, либо к режиму косого набора высоты, либо косого снижения, либо к изменению скорости горизонтального полёта. Для ударных вертолётов: сплошная жирная кривая чёрного цвета для МИ-24, сплошная жирная кривая серого цвета для МИ-28; для средних и тяжёлых многоцелевых вертолётов: сплошная жирная кривая чёрного цвета для МИ-26, сплошная жирная кривая серого цвета для МИ-6, штриховая жирная кривая чёрного цвета для МИ-8, штриховая жирная кривая серого цвета для МИ-171; для лёгких многоцелевых вертолётов: сплошная жирная кривая чёрного цвета для МИ-4, сплошная жирная кривая серого цвета для МИ-2. Фиг. 4 иллюстрирует зависимости, аналогичные представленным на фиг. 3, но для незагруженных (пустых) вертолётов.
, возбуждаемой взмахами лопастей НВ на режиме горизонтального полёта, от величины отношения, которая характеризует распределение мощности двигателя, затрачиваемой на изменение шага винта и изменение скорости вращения лопастей НВ: а) в случае максимальной загрузки вертолётов; б) в случае нормальной загрузки вертолётов. На этой иллюстрации вертикальные штриховые линии соответствуют условной границе, до которой удельная тяга меняется очень мало. Она характеризует переход от режима горизонтального полёта с постоянной скоростью, либо к режиму косого набора высоты, либо косого снижения, либо к изменению скорости горизонтального полёта. Для ударных вертолётов: сплошная жирная кривая чёрного цвета для МИ-24, сплошная жирная кривая серого цвета для МИ-28; для средних и тяжёлых многоцелевых вертолётов: сплошная жирная кривая чёрного цвета для МИ-26, сплошная жирная кривая серого цвета для МИ-6, штриховая жирная кривая чёрного цвета для МИ-8, штриховая жирная кривая серого цвета для МИ-171; для лёгких многоцелевых вертолётов: сплошная жирная кривая чёрного цвета для МИ-4, сплошная жирная кривая серого цвета для МИ-2. Фиг. 4 иллюстрирует зависимости, аналогичные представленным на фиг. 3, но для незагруженных (пустых) вертолётов.
Из анализа фиг. 3 и фиг. 4 следует, что в последнем случае диапазоны для всех типов вертолётов смещаются вниз по частоте и могут перекрываться не со «своими» диапазонами для нагруженных вертолётов. Это будет определять при работе алгоритма классификации вероятность перепутывания средних или тяжёлых многоцелевых вертолётов с лёгкими многоцелевыми вертолётами. Так как вертолёты пустые, то они не будут представлять опасности. Такой случай по факту можно отнести к разряду ложных тревог, причём такого типа ложные тревоги будут крайне редки, так как вертолётам противника без десанта или без боевой нагрузки нечего делать на нашей передовой линии. Даже если и появится такой вертолёт, то общую эффективность алгоритма он не снизит, так как в этом случае просто соответствующие подразделения и службы останутся в тонусе. С учётом этого можно привести обобщённые диапазоны для соответствующих классов вертолётов, которые приведены в таблице 2.
Таблица 2
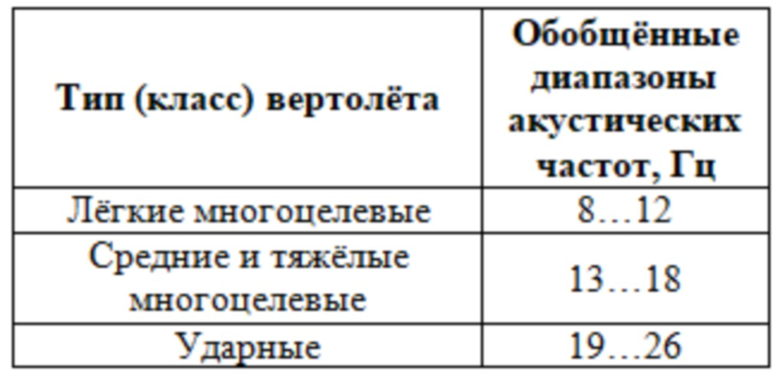
Обобщённо и на качественном уровне предлагаемый способ можно описать следующим образом:
- на входе акустического датчика необходим полосовой фильтр на диапазон (8…26) Гц с достаточной крутизной областей перехода амплитудно-частотной характеристики (АЧХ);
- после аналоговой фильтрации и усиления акустический сигнал дискретизируется в аналого-цифровом преобразователе (АЦП) с заданной частотой дискретизации fд;
- оцифрованный сигнал подвергается фильтрации цифровыми фильтрами с полосами: (8…12) Гц (k = 1), (13…18) Гц (k = 2) и (19…26) Гц (k = 3);
- в отсутствии полезного акустического сигнала для каждой из k рабочих полос формируется свой шумовой порог, который периодически переоценивается
Пk =  ,
,
где  - среднее значение шума, оцененное на некотором временном промежутке в k-й полосе частот;
- среднее значение шума, оцененное на некотором временном промежутке в k-й полосе частот;  - среднеквадратическое отклонение (СКО) этого шума от среднего значения (при этом вероятность непревышения шумами таких порогов для m = 3 составляет не менее 0.99 [8]);
- среднеквадратическое отклонение (СКО) этого шума от среднего значения (при этом вероятность непревышения шумами таких порогов для m = 3 составляет не менее 0.99 [8]);
- между моментами переоценки величины порогов в каждой из k полос рабочих частот отслеживается факт превышения акустическими сигналами текущих значений порогов и в случае превышения каким-либо из них оценивается величина надпороговых энергий;
- сравниваются по величине между собой надпороговые энергии в этих полосах частот и выбирается полоса частот с наибольшей надпороговой энергией;
- границы выбранной полосы рабочих частот определяют тип (класс) обнаруженного вертолёта согласно данным таблицы 2.
Таким образом, в предлагаемом способе классификации вертолётов с одним несущим винтом на режиме горизонтального полёта необходимо следующее.
В отсутствии вертолётов в зоне чувствительности акустического датчика.
На фиг. 5 представлена двухминутная (Тш = 120 с) запись фоновых шумов эталонным микрофоном с полосой рабочих частот (8…1000) Гц в районе трассы пролёта вертолётов. Фиг. 6 иллюстрирует амплитудный спектр, полученный преобразованием Фурье этого шумового фона после аналоговой фильтрации в общей полосе частот Δfобщ = 26-8 = 18 Гц.
1. Осуществляют усиление фонового шума.
2. Осуществляют дискретизацию фоновых шумов с частотой fд = 104 Гц sш(t) → sш,i, i = 0, 1, 2,… - отсчёты, следующие через временной дискрет Δt = 1/fд.
3. Дискретизированный шум разбивается на секундные интервалы по N = fд отсчётов в каждом  , где n = 0, 1, … N-1, а m = 0, 1, 2, …, Тш-1 - текущие номера таких секундных интервалов.
, где n = 0, 1, … N-1, а m = 0, 1, 2, …, Тш-1 - текущие номера таких секундных интервалов.
4. На каждом текущем секундном интервале осуществляют БПФ

Здесь точка над символом означает комплексную величину.
5. Фильтруют (7) цифровыми фильтрами типа Баттерворта-Чебышева в соответствующих полосах частот
 (8)
(8)
соответствующих приведённым в таблице 2.
В общем случае можно записать
 , (9)
, (9)
где k = 1, 2, 3.
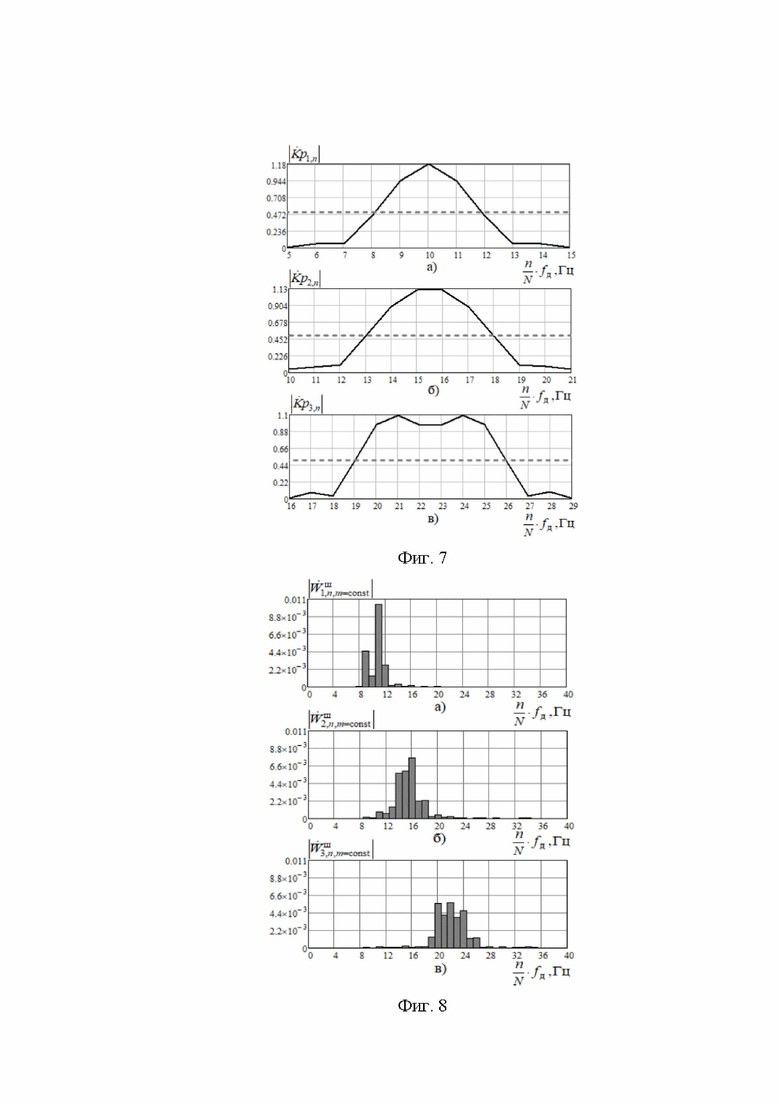
На фиг. 7 в качестве иллюстрации приведены АЧХ)  этих фильтров: а) для полосы Δf1; б) для полосы Δf2; в) для полосы Δfз. Жирным серым штрихом обозначен половинный уровень АЧХ (3 дБ), который определяет ширину этих полос. Ниже представлены соотношения, описывающие цифровую фильтрацию дискретизированных фоновых шумов
этих фильтров: а) для полосы Δf1; б) для полосы Δf2; в) для полосы Δfз. Жирным серым штрихом обозначен половинный уровень АЧХ (3 дБ), который определяет ширину этих полос. Ниже представлены соотношения, описывающие цифровую фильтрацию дискретизированных фоновых шумов  для соответствующих частотных полос
для соответствующих частотных полос
На фиг. 8 в качестве иллюстрации представлены амплитудные спектры шумов соответствующие своим полосам частот на произвольном секундном интервале. На этой иллюстрации индекс m = const означает любое число из диапазона 1…120. В данном случае const = 114.
6. Оценивают величину текущих отсчётов шумовой энергии  , а конкретно для соответствующих частотных полос
, а конкретно для соответствующих частотных полос

7. Последовательности энергетических отсчётов (11) на двухминутном интервале Тш разбиваются на Ns = Тш/δt двадцатисекундных интервалов (δt = 20 c) s = 0, 1, … Ns-1:  , где h = 0, 1,…, δt-1.
, где h = 0, 1,…, δt-1.
8. На каждом текущем двадцатисекундном интервале в полосах рабочих частот Δfk осуществляют оценку текущих энергетических шумовых порогов  следующим образом:
следующим образом:
 (12)
(12)
Здесь  - усреднённые на двадцатисекундных интервалах величины текущих энергетических отсчётов шумового фона;
- усреднённые на двадцатисекундных интервалах величины текущих энергетических отсчётов шумового фона;  - СКО от среднего значения.
- СКО от среднего значения.
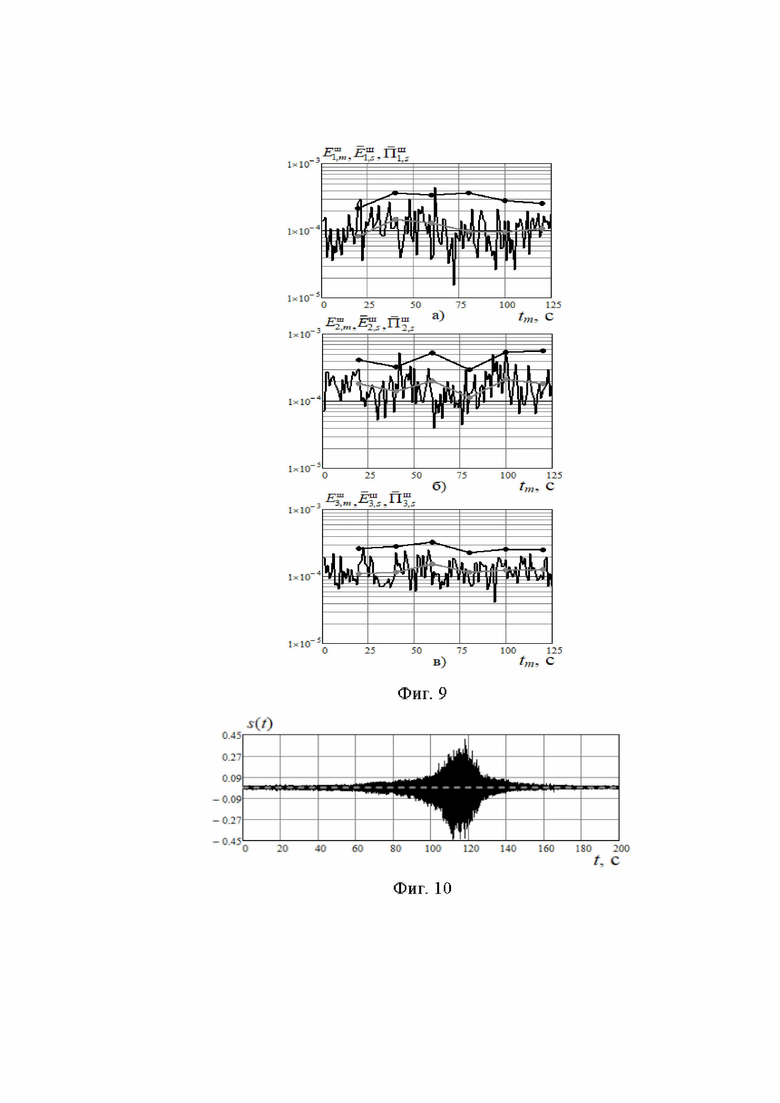
На фиг. 9 представлены оценки текущих величин  ,
, и
и  :
:
а) для полосы Δf1; б) для полосы Δf2; в) для полосы Δfз. На фиг. 9 сплошной жирной кривой чёрного цвета представлены зависимости секундных энергетических отсчётов шумового фона ; заполненные кружки на серой жирной ломаной представляют усреднённые на полуминутных интервалах текущие значения энергетических отсчётов ; заполненные кружки на чёрной жирной ломаной представляют оценки текущих значений энергетических порогов  , полученные на полуминутных интервалах. Наконец, усреднением величин
, полученные на полуминутных интервалах. Наконец, усреднением величин  оценивают значения энергетических порогов в соответствующих полосах частот, характеризующих в среднем весь двухминутный интервал, на котором произведена запись фоновых шумов
оценивают значения энергетических порогов в соответствующих полосах частот, характеризующих в среднем весь двухминутный интервал, на котором произведена запись фоновых шумов
 . (13)
. (13)
Оценки с использованием (13) дают следующие результаты:
 (14)
(14)
В присутствии вертолётов в зоне чувствительности акустического датчика.
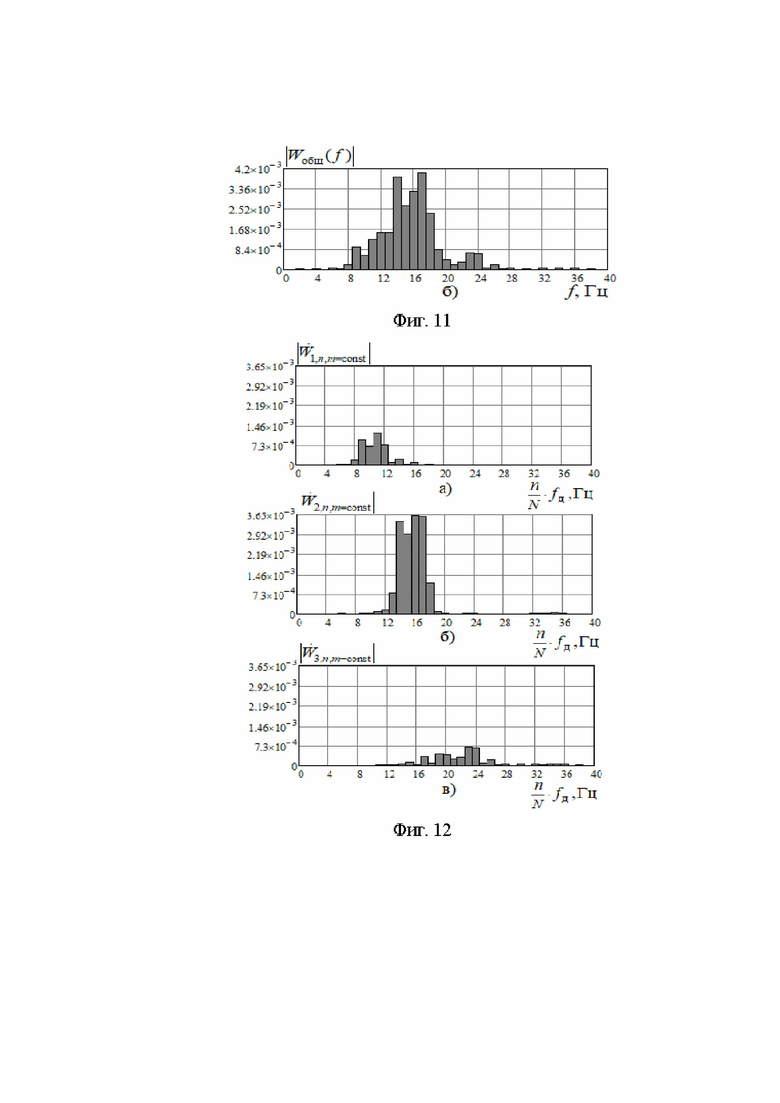
На фиг. 10 представлена запись акустического сигнала от вертолёта МИ-8Т на тот же эталонный микрофон, который располагался в 100 м от проекции трассы пролетающего вертолёта на подстилающую поверхность, полученная через 15 минут после записи шумового фона. Скорость вертолёта была равна 120 км/ч, высота полёта 120 м, то есть наклонная дальность от микрофона до вертолёта на траверзе составила 156 м. Фиг. 11 иллюстрирует амплитудный спектр, полученный преобразованием Фурье этого сигнала после аналоговой фильтрации в общей полосе частот Δfобщ = 26-8 = 18 Гц. На фиг. 12 в качестве иллюстрации представлены амплитудные спектры акустического сигнала этого вертолёта, соответствующие полосам частот Δfk на произвольном секундном интервале (здесь также const = 114) в соответствии с соотношениями (10): а) в полосе Δf1; б) в полосе Δf2;
в) в полосе Δf3.
Сравнение этих спектров с соответствующими спектрами фоновых шумов, представленными на фиг. 8, показывает, что, в отличие от шумовых, для спектров, изображённых на фиг. 12, характерно то, что уровень частотных компонент в полосе Δf2 в окрестности центральной частоты гораздо больше аналогичных компонент в полосах Δf1 и Δf3.
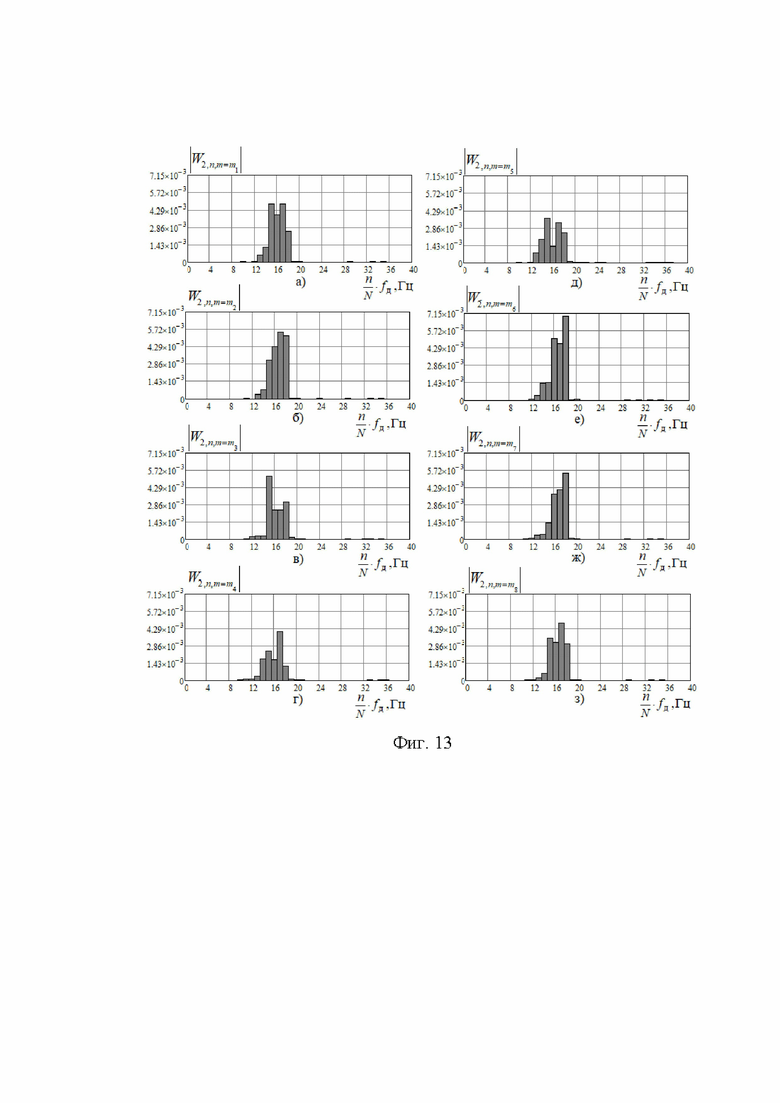
Рассмотрим амплитудные спектры подобные изображённым на фиг. 12, но распределённые достаточно равномерно по записи акустического сигнала. В качестве примера выберем такие спектры для полосы и Δf2. На фиг. 13 представлены восемь таких амплитудных спектров, полученных с использованием БПФ в соответствующие секундные интервалы, равномерно распределённые по записи акустического сигнала от вертолёта МИ-8 на режиме горизонтального полёта. Из анализа фиг. 13 следует, что с большой долей вероятности на протяжении всей записи энергия секундных отсчётов, вычисленная с использованием таких спектров, будет иметь достаточно малые отклонения от некоторой средней величины, характерной для данной наклонной дальности вертолёта. Это также характерно для уровня энергетических отсчётов и остальных полос рабочих частот. Очевидно, что этот факт выгодно использовать в дальнейшем в следующих операциях предлагаемого способа.
9. Для этого используют соотношения, аналогичные выражениям (11) и первой формуле из (12), но без уcреднения, то есть без множителя 1/δt
m = 0, 1, 2, … - текущие секундные отсчёты энергии акустического сигнала.
Далее в последовательности энергетических отсчётов (15) выделяют двадцатисекундные интервалы (δt = 20 c), которые нумеруются соответственно s = 0, 1, …; аналогично предыдущему осуществляют преобразование  , где также h = 0, 1,…, δt-1. Собственно, по этой причине ранее таким же способом проводилась оценка среднего уровня канальных шумов в соответствующих полосах частот.
, где также h = 0, 1,…, δt-1. Собственно, по этой причине ранее таким же способом проводилась оценка среднего уровня канальных шумов в соответствующих полосах частот.
10. Окончательно получают накопленные на двадцатисекундных интервалах отсчёты энергии акустического сигнала
 . (16)
. (16)
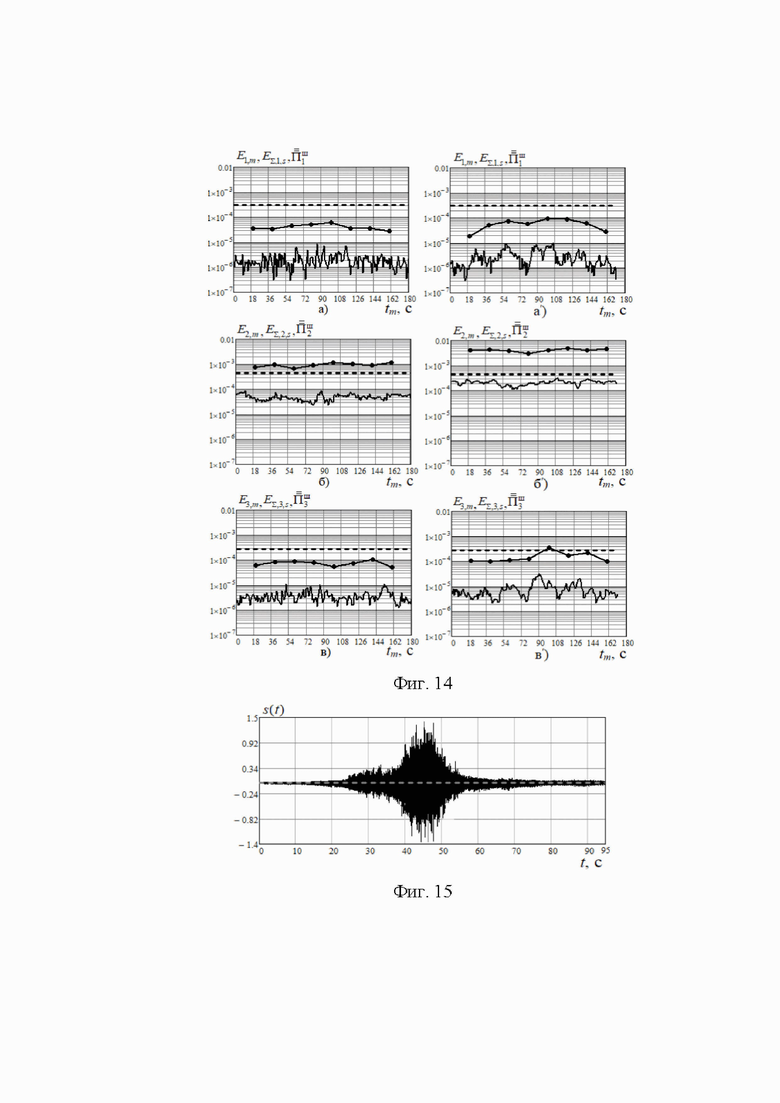
На фиг. 14 представлены оценки текущих величин  ,
, и усреднённые уже на двухминутных интервалах шумовые энергетические пороги
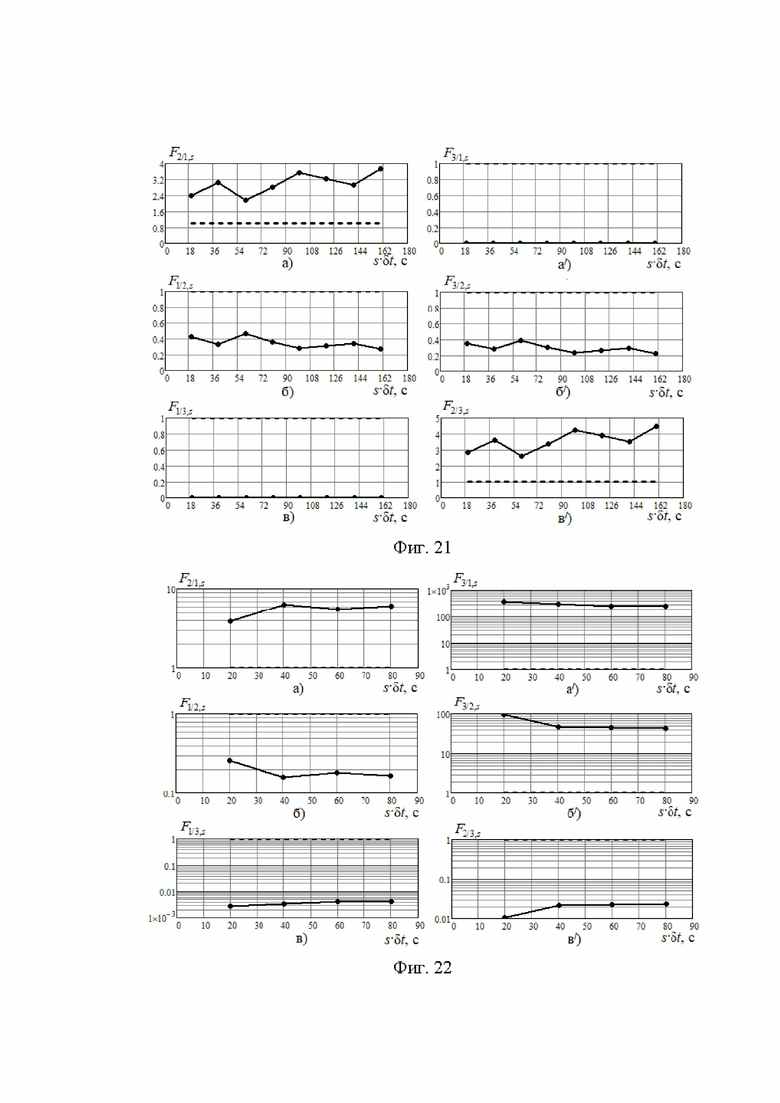
и усреднённые уже на двухминутных интервалах шумовые энергетические пороги  из (14) для вертолёта МИ-8Т, летящего горизонтально в прямом (а, б, в) и обратном (а’, б’, в’) направлениях относительно точки траверза:
из (14) для вертолёта МИ-8Т, летящего горизонтально в прямом (а, б, в) и обратном (а’, б’, в’) направлениях относительно точки траверза:
а), а’) для полосы Δf1; б), б’) для полосы Δf2; в), в’) для полосы Δfз. Здесь сплошными жирными кривыми чёрного цвета представлены зависимости секундных энергетических отсчётов акустического сигнала  ; заполненные кружки на чёрных жирных ломаных представляют накопленные на двадцатисекундных интервалах текущие значения энергии акустических сигналов
; заполненные кружки на чёрных жирных ломаных представляют накопленные на двадцатисекундных интервалах текущие значения энергии акустических сигналов ; жирными чёрными штриховыми горизонтальными линиями представлены пороги (14)
; жирными чёрными штриховыми горизонтальными линиями представлены пороги (14)  , играющие важную роль в предлагаемом способе классификации вертолётов на режиме горизонтального полёта.
, играющие важную роль в предлагаемом способе классификации вертолётов на режиме горизонтального полёта.
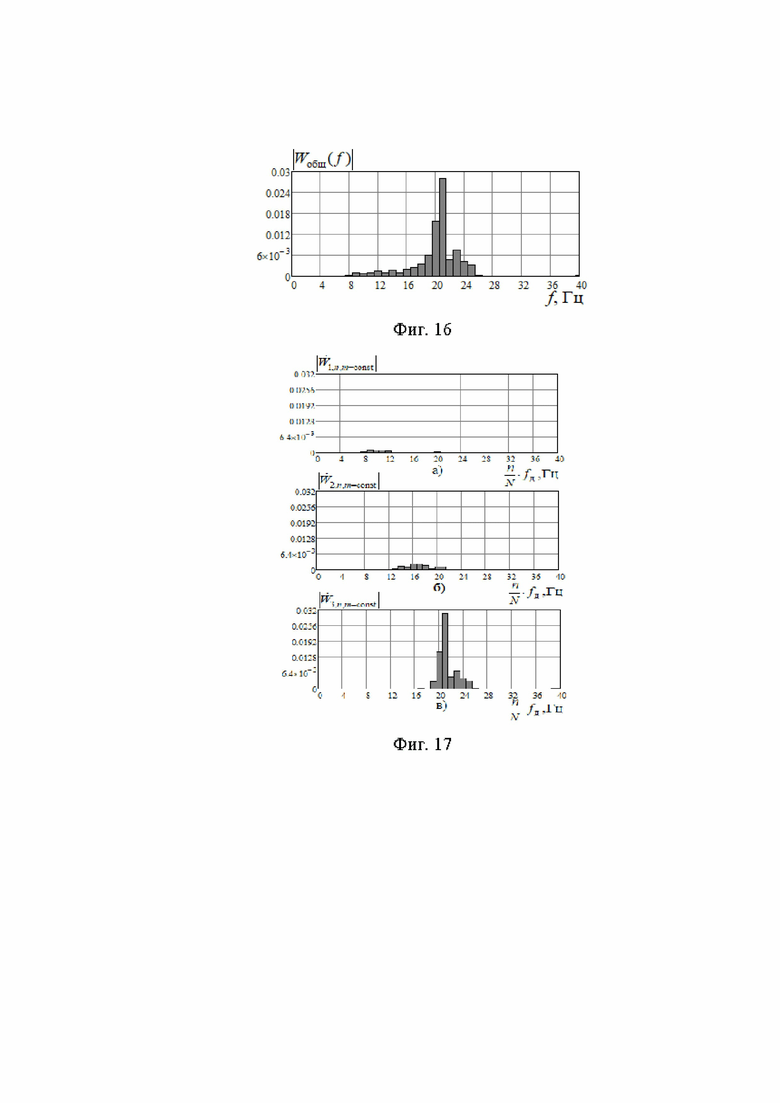
На фиг. 15 представлена запись акустического сигнала от вертолёта МИ-24 на микрофон, присыпанный песком, с полосой рабочих частот (8…400) Гц, который располагался на наклонной дальности 300…350 метров от пролетающего вертолёта. Фиг. 16 иллюстрирует амплитудный спектр, полученный преобразованием Фурье этого сигнала после аналоговой фильтрации в общей полосе частот Δfобщ = 26-8 = 18 Гц. На фиг. 17 в качестве иллюстрации представлены амплитудные спектры акустического сигнала этого вертолёта соответствующие полосам частот Δfk на произвольном секундном интервале: а) в полосе Δf1; б) в полосе Δf2; в) в полосе Δf3. Анализ иллюстраций, представленных на фиг. 16 и фиг. 17, также подтверждает справедливость данных из таблицы 2 тем, что для ударных вертолётов уровень частотных компонент в полосе Δf3 в окрестности центральной частоты гораздо больше аналогичных компонент в полосах Δf1 и Δf2.
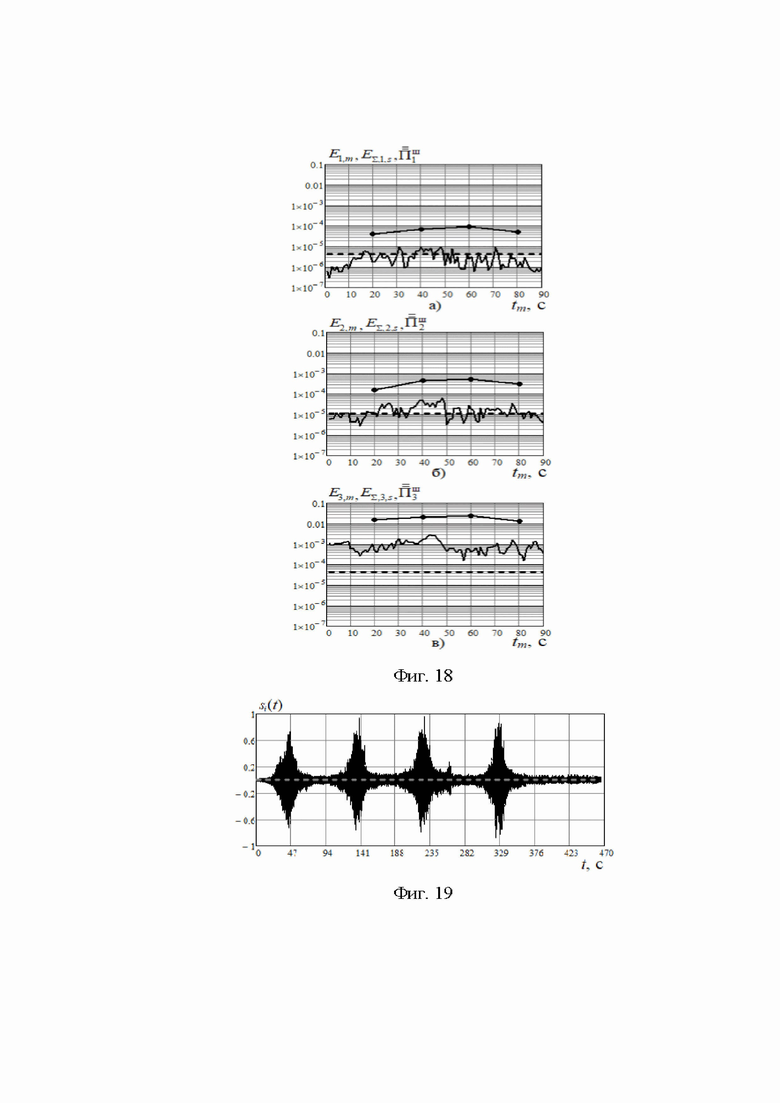
Далее использовались приведённые ранее соотношения и были получены текущие последовательности двадцатисекундных энергетических отсчётов акустических сигналов из соответствующих частотных полос и обновлённые оценки энергетических порогов для этих последовательностей. На фиг. 18 представлены эти оценки: а) для полосы Δf1; б) для полосы Δf2; в) для полосы Δfз.
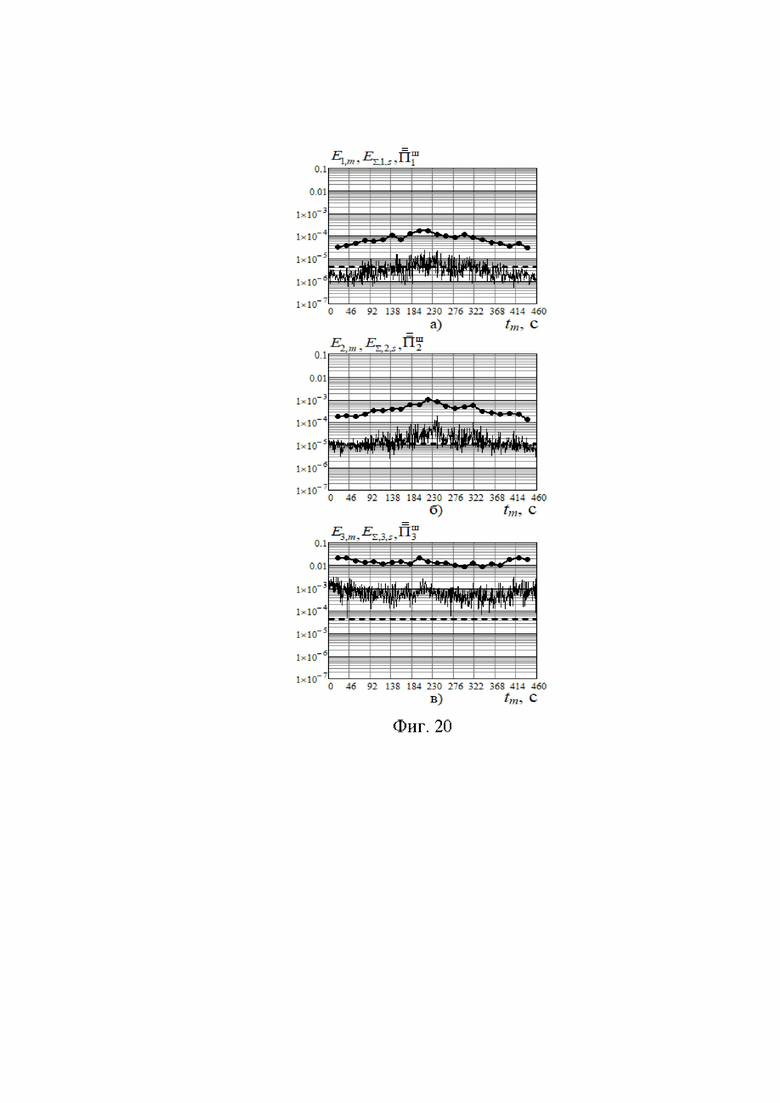
Подобные оценки были получены и в других случаев горизонтальных полётов вертолётов МИ-24. Во всех случаях текущие двадцатисекундные энергетические отсчёты акустических сигналов во всех трёх полосах частот превышали соответствующие шумовые энергетические пороги, однако, в полосе частот Δf3 их уровень был всегда гораздо больше уровня синхронных энергетических отсчётов в полосах Δf1 и Δf2. В качестве иллюстрации на фиг. 19 представлена запись на этот же микрофон акустических сигналов от пролетающих в том же направлении четырёх вертолётов МИ-24, но несколько дальше от акустического датчика и по дуге большого радиуса. На фиг. 20 представлены оценки, аналогичные приведённым на фиг. 18 для одиночного вертолёта: а) для полосы Δf1; б) для полосы Δf2; в) для полосы Δfз. Сравнение иллюстраций, представленных на фиг. 18 и фиг. 20 показывает, что в данном конкретном случае уровни текущих энергетических отсчётов для нескольких пролетающих вертолётов мало отличаются от уровня аналогичных отсчётов для пролёта одного вертолёта. Это объясняется влиянием частотной селекции (фильтрации) энергии текущих отсчётов, а также дано в пояснениях к фиг. 13.
Как было сказано выше, для осуществления классификации необходимо сравнивать между собой по величине надпороговые энергии в полосах частот Δf1, Δf2 и Δf3 и выбирать ту полосу частот, в которой текущие отсчёты обладают наибольшей надпороговой энергией. То есть необходимо сформировать критерий, который с достаточной достоверностью каждые 20 секунд позволит относить обнаруженный вертолёт к тому или иному классу.
11. Вводятся функции сравнения надпороговых энергий в частотных полосах Δf1, Δf2 и Δf3 следующим образом.
Функции сравнения надпороговых энергий второй и третьей частотных полос с надпороговой энергией первой полосы частот:
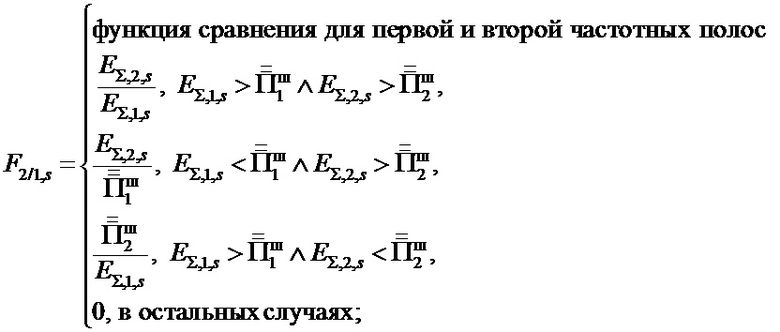 (17)
(17)
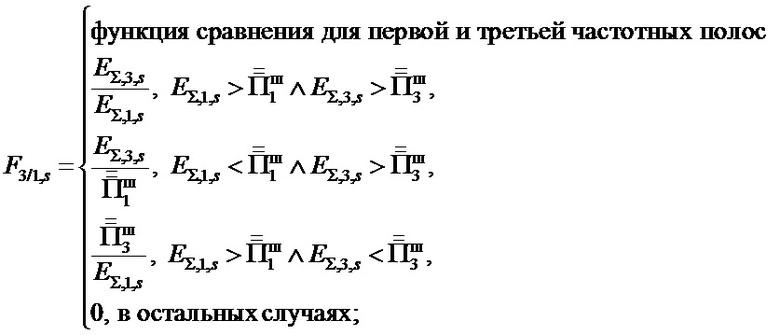 (18)
(18)
функции сравнения надпороговых энергий первой и третьей частотных полос с надпороговой энергией второй полосы частот:
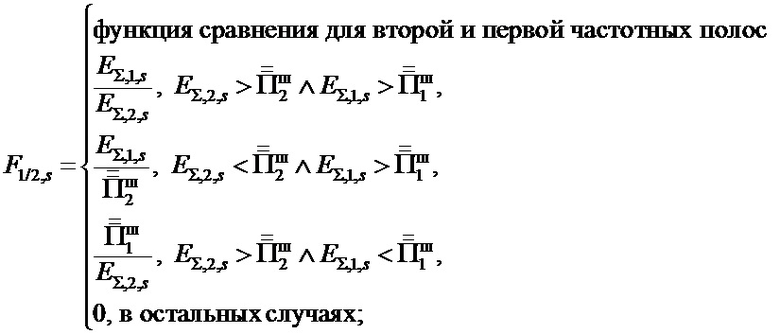 (19)
(19)
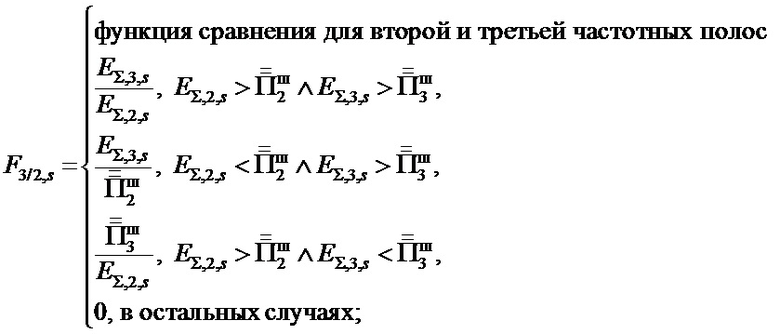 (20)
(20)
функции сравнения надпороговых энергий первой и второй частотных полос с надпороговой энергией третьей полосы частот:
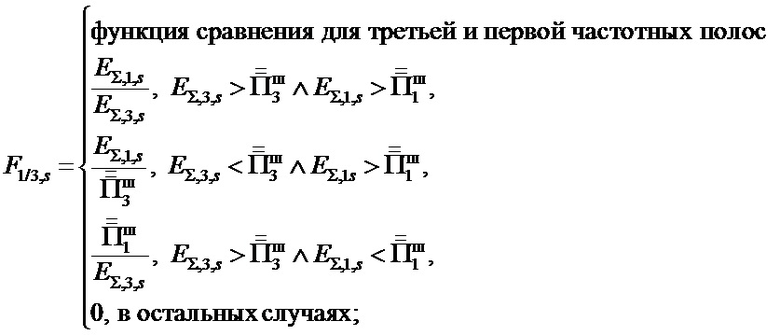 (21)
(21)
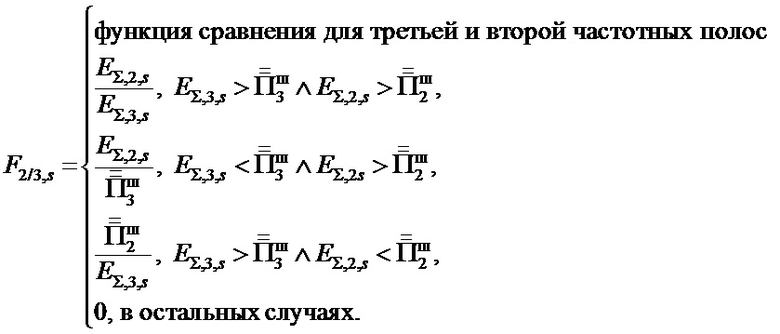 (22)
(22)
В качестве примера на фиг. 21, фиг. 22 приведены графические иллюстрации текущих значений функций (17)÷(22) относящиеся к двум классам вертолётов, представленным на фиг. 14 (а, б, в) и фиг. 18: а), а/) - Δf1; б), б/) - Δf2; в) ,в/) - Δf3.
Из анализа этих иллюстраций следует, что на фиг. 15 (б, б/) все текущие значения функций сравнения первой и третьей частотных полос с надпороговой энергией второй полосы частот  и
и  одновременно (синхронно) меньше единицы. В то же время текущие значения функций сравнения надпороговых энергий второй и третьей частотных полос с надпороговой энергией первой полосы частот
одновременно (синхронно) меньше единицы. В то же время текущие значения функций сравнения надпороговых энергий второй и третьей частотных полос с надпороговой энергией первой полосы частот  и
и  (а, а/), а также текущие значения функций сравнения надпороговых энергий первой и второй частотных полос с надпороговой энергией третьей полосы частот
(а, а/), а также текущие значения функций сравнения надпороговых энергий первой и второй частотных полос с надпороговой энергией третьей полосы частот  и
и  (в, в/) не могут быть одновременно (синхронно) меньше единицы. Аналогичная ситуация, касающаяся фиг. 18, только все текущие значения функций сравнения первой и второй частотных полос с надпороговой энергией третьей полосы частот и (в, в/) одновременно (синхронно) меньше единицы. Аналогичные оценки и анализ были проведены для многих вариантов горизонтального полёта средних многоцелевых транспортно-десантных и ударных вертолётов. При этом была подтверждена правильность количественной оценки диапазонов частот, характерных для этих классов вертолётов, приведённых в таблице 2. Это вселяет уверенность в том, что для классов лёгких и тяжёлых многоцелевых вертолётов также будут подтверждены соответствующие данные из таблицы 2.
(в, в/) не могут быть одновременно (синхронно) меньше единицы. Аналогичная ситуация, касающаяся фиг. 18, только все текущие значения функций сравнения первой и второй частотных полос с надпороговой энергией третьей полосы частот и (в, в/) одновременно (синхронно) меньше единицы. Аналогичные оценки и анализ были проведены для многих вариантов горизонтального полёта средних многоцелевых транспортно-десантных и ударных вертолётов. При этом была подтверждена правильность количественной оценки диапазонов частот, характерных для этих классов вертолётов, приведённых в таблице 2. Это вселяет уверенность в том, что для классов лёгких и тяжёлых многоцелевых вертолётов также будут подтверждены соответствующие данные из таблицы 2.
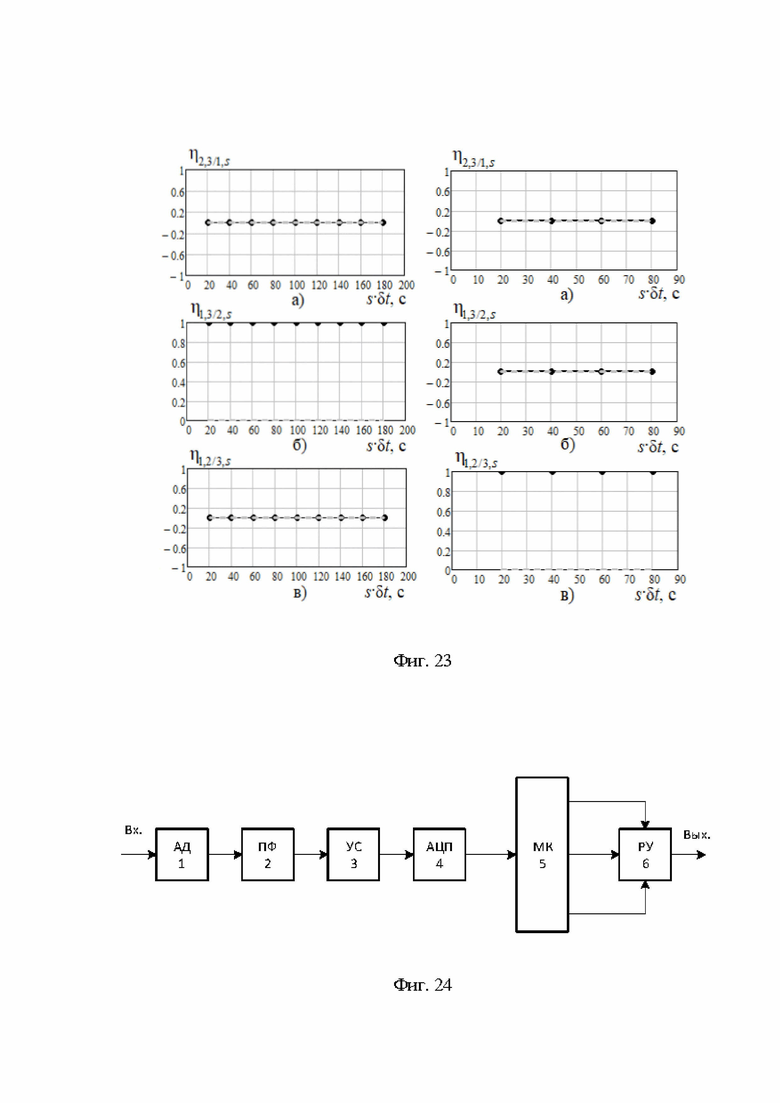
12. Используя результаты приведённых выше анализов, соответствующих фиг. 14, фиг. 18 и подобных им, можно сформулировать соотношения для критерия принадлежности вертолётов на режиме горизонтального полёта к определённым классам:
 (23)
(23)
 (24)
(24)
 (25)
(25)
На фиг. 23 представлены зависимости (23)÷(25) соответствующие иллюстрациям, представленным на фиг. 14 (а, б, в) - слева и фиг. 18 - справа. Анализ фиг. 23 и исследованных им подобных показывает, что предлагаемый способ классификации вертолётов на режиме горизонтального полёта достаточно прост и может быть реализован с уверенностью в его эффективности при существенной экономии энергетического, временного и аппаратного ресурсов по сравнению с использующимися в настоящее время способами аналогичного назначения.
На фиг. 24 представлена укрупнённая блок-схема устройства, реализующего предлагаемый способ классификации, где введены следующие обозначения:
1 – акустический датчик (АД);
2 – аналоговый полосовой фильтр (ПФ);
3 – усилитель (Ус);
4 – аналого-цифровой преобразователь (АЦП);
5 – микроконтроллер (МК);
6 – решающее устройство (РУ).
Устройство содержит последовательно соединённые акустический датчик 1, аналоговый полосовой фильтр 2, усилитель сигнала 3, аналого-цифровой преобразователь 4 и микроконтроллер 5, первый, второй и третий выходы которого соединены с соответствующими входами решающего устройства 6, выход которого является выходом устройства.
С момента обнаружения вертолёта устройство классификации работает следующим образом.
На вход акустического приёмника 1 поступает полезный акустический сигнал, где он преобразуется в электрический сигнал. Электрический сигнал с выхода акустического приёмника поступает на вход аналогового полосового фильтра 2, настроенного на общую полосу частот Δfобщ, с выхода которого поступает на вход усилителя 3, где усиливается до необходимой величины и поступает на вход аналого-цифрового преобразователя 4, где подвергается дискретизации с заданной частотой и с его выхода отфильтрованный в общей полосе и оцифрованный акустический сигнал поступает на вход микроконтроллера 5, в котором осуществляются основные операции, описанные в способе:
- БПФ оцифрованного сигнала аналогично (7);
- цифровая фильтрация в полосах Δf1, Δf2 и Δfз, аналогично (10);
- накопление текущих секундных энергетических отсчётов (15);
- двадцатисекундные накопления энергетических отсчётов (16);
- формирование функций сравнения (17)÷(22);
- формирование соотношений для критерия принадлежности вертолёта к определённому классу (23)÷(25), текущие отсчёты которых поступают на соответствующие входы решающего устройства 6, с выхода которого потребителю поступает информация о классе обнаруженного вертолёта.
Реализация данного устройства не должна вызывать затруднений, так как все его блоки, являются достаточно часто используемые в инженерных разработках и описаны в патентах.
Технический результат – повышение эффективности классификации при упрощении реализации способа и существенной экономии энергетического, временного и аппаратного ресурсов.
Источники информации
1. Патент 2293350 (РФ). Устройство для обнаружения и классификации летящих и зависших вертолётов. МПК G01S 13/52. Захаров Д.Л., Фитасов Е.С. Заявка № 2005112690/09 от 26.04.2005. Опубл. 10.02.2007 г.
2. Патент US 10032464 B2. Drone detection andclassification with compensation for background clutter sources / John Franklin, BrianHearing. - July 24, 2018.
3. Патент 2513719 (РФ). Нейросетевая адаптивная система распознавания объектов по их акустическим излучениям. МПК G06K 19/00, G06F 19/00. Борзов А.Б., Лихоеденко К.П., Павлов Г.Л., Хохлов В.К., Кандидатов И.А., Сидоркина Ю.А., Юренев А.В. Заявка: № 2013115264/08 от 04.04.2015. Опубл. 20.04.2014 г.
4. Базов, Д.И. Аэродинамика вертолётов. / Д.И. Базов. – М.: Транспорт, 1969. – 196 с.
5. Джонсон, У. Теория вертолёта. / У. Джонсон. М.: Мир, 1983. – 1022с.
6. Егер, С.М. Посвящается 75-летию МАИ. Основы авиационной техники. Изд. 3-е доп. и испр. / С.М Егер, А.М. Матвеенко, И.А. Шаталов. . – М.: Машиностроение, 2003. – 720 с.
7. Патент 2589290 (РФ). Способ и устройство акустического обнаружения и распознавания летательных аппаратов. МПК G01S 3/80. Белов А.А., Жидков Е.Н., Козлов А.Ю. Заявка: № 2015106192/28 от 24.02.2015. Опубл. 10.07.2016 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ повышения эффективности обработки сверхширокополосных короткоимпульсных сигналов на приёмной стороне | 2019 |
|
RU2731207C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ синхронизации приёмного и передающего устройств радиолинии при использовании короткоимпульсных сверхширокополосных сигналов | 2019 |
|
RU2723269C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| Устройство различения короткоимпульсных сверхширокополосных сигналов повышенной эффективности | 2019 |
|
RU2731126C1 |
| Устройство синхронизации приёмной и передающей части радиолинии при использовании короткоимпульсных сверхширокополосных сигналов | 2019 |
|
RU2713379C1 |
Использование: изобретение относится к области акустической разведки и может быть использовано в разведывательно-сигнализационных комплексах и системах тактического и оперативно-тактического назначения для раннего предупреждения о возможной высадке десанта транспортно-десантными вертолётами или огневого налёта ударных вертолётов противника. Технический результат: повышение эффективности классификации при упрощении реализации способа и существенной экономии энергетического, временного и аппаратного ресурсов. Сущность: результат достигается за счет использования информации об оптимальном управлении вертолётом на режиме горизонтального полёта для обоснованного выбора частотных диапазонов, характерных для частоты модуляции уходящего потока воздуха периодическими взмахами лопастей несущего винта вертолётов различных классов. 24 ил., 2 табл.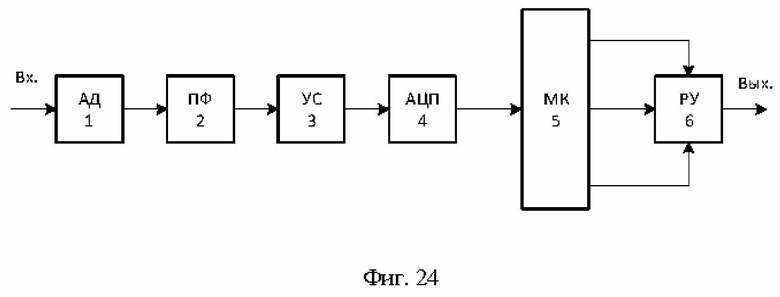
Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта, включающий регистрацию акустического сигнала, возбуждаемого вращением лопастей несущего винта, его фильтрацию в обоснованно выбранной общей полосе частот, усиление и дискретизацию с заданной частотой, быстрое преобразование Фурье сигнала на секундных интервалах, отличающийся тем, что осуществляется цифровая фильтрация в трёх полосах рабочих частот, лежащих внутри общей полосы частот, с оценкой текущих секундных отсчётов энергии сигнала в этих полосах; в каждой из частотных полос осуществляется оценка величины двадцатисекундного накопления энергетических отсчётов и формирование функций сравнения с использованием этих текущих величин и шумовых порогов, периодически обновляемых для каждой из полос; с использованием функций сравнения для каждой полосы частот осуществляется формирование текущих отсчётов соотношения, являющегося критерием принадлежности обнаруженного вертолёта к тому классу, в полосе частот которого величина текущих отсчётов критерия равна единице.
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ЛЕТЯЩИХ И ЗАВИСШИХ ВЕРТОЛЕТОВ | 2005 |
|
RU2293350C2 |
| US 5689268 A1, 18.11.1997 | |||
| US 10032464 B2, 24.07.2018 | |||
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| 0 |
|
SU157396A1 | |

