Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля места схождения трех дорог в одну линейными радиоволновыми средствами обнаружения (СО), когда требуется определить направление движения нарушителя.
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. Для сил реагирования наиболее важными являются сведения о направлении движения нарушителя, позволяя значительно сузить направление его поиска и тем самым повысить вероятность обнаружения и задержания [1]. На практике для решения этой задачи широко применяются линейные радиоволновые средства обнаружения, характеризующиеся протяженной зоной обнаружения (ЗО) - от 50 до 200 метров [2, 3]. Одним из наиболее часто встречаемых элементов дорожной сети является развилка дорог - место схождения двух дорог в одну [4, 5].
Известен способ охранного мониторинга развилки дорог с применением линейного радиоволнового средства обнаружения, позволяющий раздельно определить две сквозные дороги, по которым движется обнаруженный нарушитель. Способ заключается в развертывании СО по схеме, в которой его ЗО пересекает две сходящиеся в одну дороги развилки; обеспечении схемой развертывания средства выделения полезного сигнала с разной глубиной модуляции в приемнике (ПРМ) при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ и сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины ЗО; размещении ПРМ средства на расстоянии не более 5-10 метров от одной дороги, передатчика (ПРД) - на расстоянии, равном половине длины ЗО (±10 метров) от другой дороги; последующем контроле средством развилки дорог; формировании сигнала тревоги блоком большого порога при пересечении ЗО средства нарушителем вблизи ПРМ; формировании сигнала тревоги блоками малого и положительного порога при пересечении нарушителем ЗО посередине; передаче ПРМ средства на систему сбора и обработки информации (ССОИ) сигнала тревоги с указанием блока порога, сформировавшего его; обеспечении приема сигналов тревоги от ПРМ средства ССОИ и накопления их в течение установленного времени; применении алгоритма определения направления движения нарушителя через развилку дорог на основе сравнения данных о блоке порога или комбинации блоков, указанных СО вместе с сигналом тревоги, с априорно известной схемой развертывания СО на развилке дорог [6].
Другим наиболее часто встречаемым, но более сложным элементом дорожной сети является место схождения трех дорог в одну. Количество направлений движения нарушителя через него, по сравнению с местом схождения двух дорог в одну, больше в два раза (двенадцать по сравнению с шестью). Применение известного способа для его охранного мониторинга не позволяет определить все двенадцать направлений движения нарушителя.
Целью изобретения является получение возможности определения всех двенадцати направлений движения нарушителя через место схождения трех дорог в одну с использованием минимального количества СО.
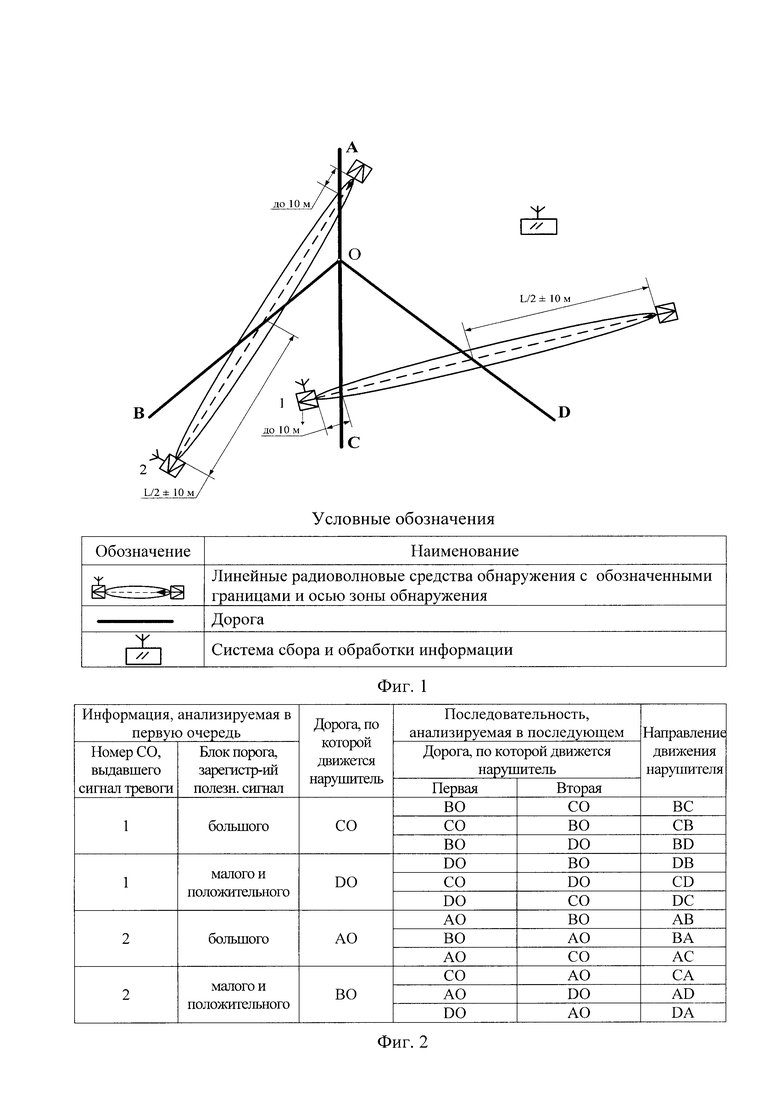
Для достижения поставленной цели разработан способ охранного мониторинга места схождения трех дорог в одну линейными радиоволновыми средствами обнаружения, заключающийся в развертывании двух СО по схеме, обеспечивающей выделение полезного сигнала с разной глубиной и знаком модуляции в ПРМ каждого средства при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ (ПРД) или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении середины ЗО; размещении зона обнаружения каждого из средств таким образом, что она пересекает две разные соседние дороги места схождения; приемник каждого средства находится на расстоянии не более 5-10 метров от одной дороги, передатчик - на расстоянии, равном половине длины зоны обнаружения (±10 метров) от другой дороги места схождения трех дорог в одну; передаче приемниками средств на ССОИ сигнала тревоги с указанием номера средства и блока порога, зарегистрировавшего полезный сигнал; обеспечении приема сигналов тревоги от приемников средств ССОИ; применении в ССОИ алгоритма определяющего движение нарушителя по каждой из четырех дорог места схождения по номеру СО, выдавшего сигнал тревоги, с указанием блока (блоков) порога, зарегистрировавшего полезный сигнал; в определении алгоритмом в дальнейшем, направления движения нарушителя через место схождения трех дорог в одну по полученной комбинации двух дорог, на которых был обнаружен нарушитель (фиг. 1, 2).
Известно, что полезный сигнал, выделяемый ПРМ СО, представляет собой амплитудную модуляцию опорного сигнала, вследствие пересечения нарушителем ЗО и различается в зависимости от места ее пересечения [7]:
- при пересечении середины ЗО (±10 метров) - полезный сигнал с малой глубиной модуляции и отрицательным и положительным знаками регистрируется блоками малого и положительного порогов;
- при пересечении ЗО по участку вблизи (до 10 метров) ПРМ (ПРД) - полезный сигнал с большой глубиной модуляции и отрицательным знаком регистрируется блоком большого порога.
Предлагаемая схема развертывания средств обнаружения позволяет получить от них и использовать в последующем для обработки в ССОИ по заданному алгоритму два вида уникальных признаков:
- в первую очередь - это номер СО, выдавшего сигнал тревоги, с указанием блока (блоков) порога, зарегистрировавшего полезный сигнал, определяющий одну из четырех дорог места схождения, по которой движется нарушитель;
- в последующем - это комбинация двух дорог места схождения, по которым движется нарушитель, определяющая одно из двенадцати направлений его движения (фиг. 2).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание на местности системы 19 сбора и обработки информации (фиг. 3).
2. Развертывание на месте схождения трех дорог в одну средств обнаружения, включающих в себя: передатчик 3 (11) средства обнаружения и приемник, состоящий из усилителя 4 (12), фильтра 5 (13) полосового, детектора 6 (14), блока 7 (15) большого порога, выходного 8 (16) интерфейса, блока 9 (17) малого порога, блока 10 (18) положительного порога по установленной схеме (фиг. 2, 3).
3. Запись в память системы 19 сбора и обработки информации алгоритма определения дороги места схождения, по которой движется нарушитель и направления его движения (фиг. 2).
Основной этап начинается при движении нарушителя через место схождения трех дорог в одну и попадании его в ЗО одного из средств. Он включает в себя:
1. Выделение детектором 6 (14), усиление усилителем 4 (12) и фильтрация фильтром 5 (13) полосовым полезного сигнала при пересечении зоны обнаружения нарушителем (фиг. 3).
2. Анализ глубины и знака модуляции полезного сигнала, поступившего с детектора 6 (14) на блок 7 (15) большого порога, блок 9 (17) малого порога, блок 10 (18) положительного порога (фиг. 3).
3. Регистрацию полезного сигнала блоком 9 (17) малого порога и блоком 10 (18) положительного порога в случае пересечения нарушителем середины 30 или блоком 7 (15) большого порога в случае пересечения ЗО по участку вблизи ПРМ или ПРД (фиг. 3).
4. Передачу сигнала тревоги с указанием номера средства и блока (блоков) порога, зарегистрировавшего полезный сигнал выходным 8 (16) интерфейсом на систему 19 сбора и обработки информации (фиг. 3).
5. Определение системой 19 сбора и обработки информации первой дороги места схождения, по которой движется нарушитель по номеру СО и указанного с ним блока (блоков) порога, зарегистрировавшего полезный сигнал в соответствии с заданным алгоритмом (фиг. 2, 3).
6. Выделение, анализ глубины модуляции, регистрация полезного сигнала, передача сигнала тревоги на систему 19 сбора и обработки информации при втором пересечении нарушителем зоны обнаружения одного из средств (фиг. 1, 2).
7. Определение системой 19 сбора и обработки информации второй дороги места схождения, по которой движется нарушитель (фиг. 1, 2).
8. Определение системой 19 сбора и обработки информации, направления движения нарушителя через место схождения трех дорог по полученной комбинация из двух дорог места схождения, по которым он движется в соответствии с заданным алгоритмом (фиг. 1, 2).
8. Обнуление памяти системы 19 сбора и обработки информации (фиг. 3).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания линейных радиоволновых средств обнаружения в предлагаемом способе;
- фиг. 2 - алгоритм определения дороги места схождения трех дорог, по которой движется нарушитель и направления его движения в предлагаемом способе;
- фиг. 3 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения всех двенадцати направлений движения нарушителя через место схождения трех дорог в одну с использованием минимального количества СО.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Ганьшин В.Н., Хренов В.С. Таблицы для разбивки круговых и переходных прямых. - К.: 1974. - 432 с.
6. Пат. №2648210, Российская Федерация, МПК G08B 1/00. Способ охранного мониторинга развилки дорог с применением линейного радиоволнового средства обнаружения / С.А. Удот, А.В. Рубаник - №2017105966; заявл. 21.02.17; опубл. 22.03.18, Бюл. №9.
7. Долуханов М.П. Распространение радиоволн: Учебник - М.: Связьиздат, 1960. - 391 с.

Изобретение относится к способам охранного мониторинга местности. Технический результат заключается в обеспечении возможности обнаружения всех двенадцати направлений перемещения нарушителя через место схождения трех дорог в одну. Способ заключается в развертывании на месте схождения трех дорог в одну двух средств обнаружения (СО) по схеме, обеспечивающей выделение полезного сигнала с разной глубиной и знаком модуляции в приемнике (ПРМ) каждого средства при пересечении зоны охраны (ЗО) нарушителем и применении соответствующего алгоритма, определяющего движение нарушителя по каждой из четырех дорог места схождения по номеру СО, выдавшего сигнал тревоги, с указанием блока (блоков) порога, зарегистрировавшего полезный сигнал, и по полученной комбинации двух дорог, на которых был обнаружен нарушитель. 3 ил.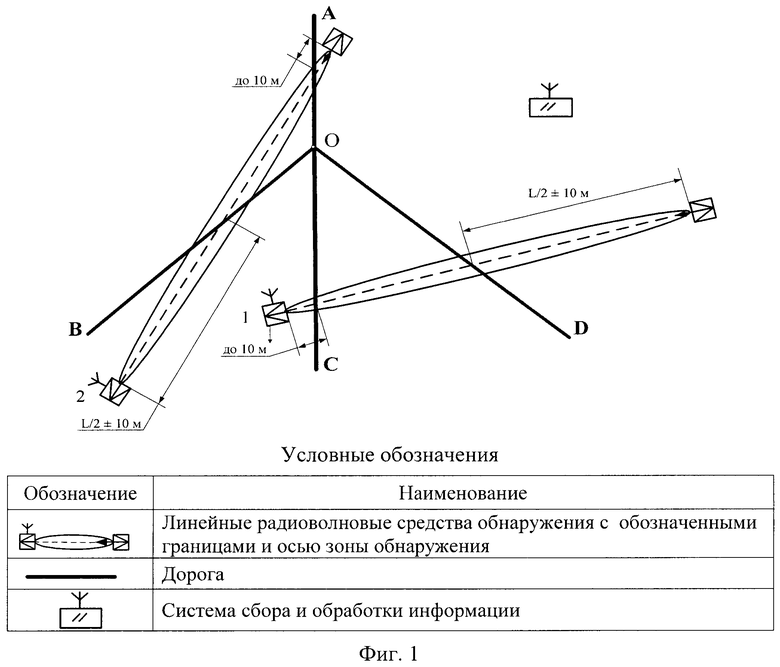
Способ охранного мониторинга с применением линейных радиоволновых средств обнаружения, заключающийся в обеспечении схемой развертывания средства выделения полезного сигнала с разной глубиной модуляции в приемнике при пересечении зоны обнаружения нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем зоны обнаружения вблизи приемника или передатчика и сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины зоны обнаружения; размещении приемника средства на расстоянии не более 5-10 метров от одной дороги, передатчика - на расстоянии, не более 10 метров от середины зоны обнаружения от другой дороги места схождения дорог в одну; регистрации полезного сигнала блоком большого порога при пересечении зоны обнаружения средства нарушителем вблизи приемника или передатчика; регистрации полезного сигнала блоками малого и положительного порога при пересечении нарушителем середины зоны обнаружения; передаче приемниками средств на систему сбора и обработки информации сигнала тревоги с указанием блока порога, зарегистрировавшего полезный сигнал; обеспечении приема сигналов тревоги от приемников средств системой сбора и обработки информации, отличающийся тем, что два средства обнаружения разворачиваются на месте схождения трех дорог в одну; зона обнаружения каждого средства пересекает две разные соседние дороги места схождения; в системе сбора и обработки информации применяется алгоритм, определяющий движение нарушителя по каждой из четырех дорог места схождения по номеру средства обнаружения, выдавшего сигнал тревоги, с указанием блока или блоков порога, зарегистрировавшего полезный сигнал; в дальнейшем, алгоритм определяет направление движения нарушителя через место схождения трех дорог в одну по полученной комбинации двух дорог, на которых был обнаружен нарушитель.
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2606045C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА РАЗВИЛКИ ДОРОГ С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2648210C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА ПЕРЕКРЕСТКЕ ДОРОГ | 2012 |
|
RU2523068C2 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2012 |
|
RU2514126C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 5980123 A1, 09.11.1999 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

