Изобретение относится к способу и системе определения положения опалубки, стыкуемой по меньшей мере с одной существующей опалубкой.
Опалубкой в данном контексте называется отдельный элемент, который обычно является плоским по меньшей мере на одной стороне, для изготовления полой формы для отливки бетонных частей. Такой элемент обычно включает в себя плиту или щит опалубочной системы и в качестве опции может содержать раму. Опалубочный щит изготовлен, как правило, из древесины, например фанеры или массивной древесины, и может иметь в качестве опции покрытие. При этом изобретение применимо к любому виду опалубки, например опалубкам стен и/или опалубкам перекрытий и/или подъемным опалубкам.
Такие опалубки имеют, как правило, многократное применение, нередко также на одной и той же стройплощадке. Кроме того, в зависимости от требований к отливаемым бетонным элементам используются опалубки разных размеров и толщины.
Чтобы оптимально использовать имеющиеся опалубки, важно проследить, когда и где какая опалубка используется. На основе этой информации и/или заданного времени монтажа опалубки или определенного процесса строительства момент демонтажа формы для каждой опалубки можно определить индивидуально. Таким образом, в распоряжении имеется информация о том, какая опалубка, с какими габаритами, где и когда освобождается для повторного применения. Это позволяет создать общее представление об имеющихся опалубках и оптимизировать общую необходимость в опалубках (т.е. их число), а также пути транспортировки отдельных опалубок. Кроме того, также предпочтительно проследить местонахождение опалубок во время промежуточного хранения. Из этого можно сделать выводы об управлении отходами, логистике и/или операциях на стройплощадке, и можно выявить, где именно имеется место для установки опалубки.
Для определения места или положения опалубки требуется точность, которой можно достичь, например, с помощью UWB-технологии (UWB - Ultra-Wide Band (сверхширокая полоса)). При этом используются сигналы с шириной полосы по меньшей мере 500 МГц, и можно использовать относительно низкую мощность передачи, чтобы не мешать уже занятым частотным диапазонам (например, 0,5 мВт/ -41,3 дБм/МГц). Эти частотные диапазоны с точностью до сантиметра обеспечивают локализацию в помещениях и интегрированный обмен данными. В этой технологии в нескольких опорных точках (базовых точках) вокруг заданной области расположены приемники (или «анкеры») сигналов позиционирования. Приемники принимают сигналы позиционирования от передатчиков (например, «метки», «сенсоры» или «передатчики») и пересылают принятую информацию (например, метку времени, интенсивность сигнала, содержание данных) в центр (или на «сервер»). Эта пересылка может происходить в режиме реального времени («real-time», RT) или в режиме, близком к реальному времени («near real-time», NRT). В этом случае говорят о системе позиционирования в режиме реального времени («Real-time locating system», RTLS). При этом определение положения основано на определении расстояния от передатчика до нескольких приемников; при этом устанавливается время прохождения между передатчиком и по меньшей мере тремя приемниками, и на основе этой принятой приемниками информации вместе с известными положениями приемников посредством трилатерации определяется положение передатчика. Передатчики могут работать, например, на аккумуляторах. Они передают на приемники в основном по меньшей мере одну идентификацию (ID) и метку времени («timestamp»). Пример применения этой технологии позиционирования для динамического определения местонахождения лиц, например на игровом поле, описан в WO 2013/167702 А1.
Однако для применения определения положения опалубок на стройплощадке описанная выше технология имеет тот недостаток, что требуется визуальная связь («Line of Sight», LoS) между передатчиком и по меньшей мере тремя приемниками. Под визуальной связью можно понимать не только прямую визуальную связь между приемником и передатчиком, но и бесперебойную или с малыми перебоями передачу электромагнитных сигналов, данных и т.д. Вследствие в основном плитообразной геометрии опалубок и их противоположного/зеркального расположения при использовании и при одновременном использовании нескольких опалубок (например, более десяти), почти неизбежно возникают перебои этих визуальных связей и помехи сигналов, в частности, когда приемники должны быть расположены за пределами стройплощадки (например, на краю или выше). Эту проблему можно было бы, в принципе, решить за счет того, чтобы в каждом возводимом помещении расположить три приемника. Однако связанные с этим затраты (расходы на оборудование и расходы на оснащение) делают это решение непрактичным.
Другая цель преследуется в ЕР 3351699 А1. Описанные здесь система и способ служат для автоматизации управления краном при строительстве здания из предварительно изготовленных стеновых элементов. При этом заданное положение нового стенового элемента устанавливается на основе измерений уже существующего здания и нового стенового элемента. Фактическое положение нового стенового элемента устанавливается и непрерывно контролируется с помощью GNSS-приемников на самом стеновом элементе или на грейферном кране или с помощью измерительных приборов и соответствующих отражателей на новом стеновом элементе.
US 2005/0107934 А1 касается лишь вообще определения позиции на стройплощадке. Позиции различных контролируемых единиц устанавливаются через GNSS.
Задачей изобретения является устранение или, по меньшей мере, уменьшение, по меньшей мере, отдельных недостатков решений существующего уровня техники.
Изобретение предусматривает способ описанного выше рода, включающий в себя:
- передачу сигнала позиционирования от стыкуемой опалубки (т.е. от метки или передатчика этой опалубки);
- прием переданного сигнала позиционирования приемником по меньшей мере в одной опорной точке;
- определение расстояния между стыкуемой опалубкой и по меньшей мере одной опорной точкой на основе принятого сигнала позиционирования;
- определение согласующегося с выявленным расстоянием положения стыковки стыкуемой опалубки по меньшей мере с одной существующей опалубкой (причем положение/положения по меньшей мере одной существующей опалубки известно/известны) и
- сохранение в памяти выявленного положения стыковки в качестве положения стыкуемой опалубки.
Кроме того, изобретение предусматривает систему описанного выше рода, включающую в себя:
- стыкуемую опалубку с передатчиком сигнала позиционирования;
- по меньшей мере одну опорную точку с приемником сигнала позиционирования;
- блок определения расстояний, предназначенный для определения расстояния между стыкуемой опалубкой и по меньшей мере одной опорной точкой на основе переданного передатчиком и принятого приемником сигнала позиционирования;
- базу позиционных данных с хранящимися в памяти положениями по меньшей мере одной существующей опалубки и
- блок согласования, предназначенный для определения положения стыковки стыкуемой опалубки с существующей опалубкой, согласуемой с расстоянием, выявленным с помощью блока определения расстояний, и для сохранения в базе позиционных данных выявленных положений стыковки в качестве положения стыкуемой опалубки.
При определении расстояния между стыкуемой опалубкой и опорной точкой определяется расстояние между передатчиком или меткой на опалубке и одним или несколькими приемниками или анкерами. Разумеется, это определение основано не исключительно на принятом сигнале позиционирования, а учитывает, например, также позицию приемника и момент приема сигнала позиционирования. В зависимости от обстоятельств могут быть определены одно или несколько или все положения стыковки стыкуемой опалубки по меньшей мере с одной существующей опалубкой. Определение положения стыковки требует знания геометрии обеих опалубок. В простейшем случае можно принять единую, заданную геометрию всех опалубок. Если была выявлена ровно одно согласующееся положение стыковки, то это положение стыковки сохраняется в качестве положения стыкуемой опалубки. В противном случае может осуществляться выбор на основе выстраивания положений стыковки, например на основе соответствующих расхождений или соответствующей вероятности.
Определение положения стыковки может включать в себя, например:
- определение всех возможных положений стыковки стыкуемой опалубки по меньшей мере с одной существующей опалубкой;
- определение соответствующего расстояния выявленных возможных положений стыковки по меньшей мере до одной опорной точки;
- определение тех положений стыковки в качестве согласуемых с выявленным расстоянием, соответствующее расстояние между которыми лежит в пределах диапазона допусков вокруг выявленного расстояния. В качестве диапазона допусков можно использовать, в частности, диапазон расстояний, ширина которого соответствует, в основном, неточности позиционирования, например шириной 5-30 см или примерно 10 см или примерно 20 см.
В качестве альтернативы определению всех положени1 стыковки стыкуемой опалубки по меньшей мере с одной существующей опалубкой возможно также определение только положения стыковки в пределах диапазона допусков выявленного расстояния. В частности, при очень большом числе существующих опалубок способы с такими действиями могут быть упрощены и ускорены.
Кроме того, определение положения стыковки может включать в себя ограничение возможных положений стыковки на основе границы локальной области. При этом граница локальной области образует граничное условие для возможных положений стыковки. Это значит, что рассматриваются только такие стыковочные положения, где опалубка расположена в пределах границы локальной области. В качестве такой границы области можно использовать, например, величину и позицию стройплощадки или, вообще, ее границу или габариты. В этом примере рассматриваются только такие положения стыковки, в которых опалубка остается на стройплощадке.
В этой связи определение положения стыковки может включать в себя далее ограничение возможных положений стыковки на основе информации об ориентации стыкуемой опалубки. Информация об ориентации может быть получена, например, с помощью магнетометра или компаса, который может быть фиксирован на стыкуемой опалубке. При наличии информации об ориентации возможные положения стыковки (т.е. выявленные одним из названных выше способов), в которых гипотетическое положение опалубки отличается от выявленного фактического положения на основе информации об ориентации, могут быть, в принципе, не приниматься во внимание. При этом может использоваться предельное значение или диапазон допусков, которое/который ориентируется на неточность информации об ориентации, например диапазон допусков 10° для горизонтальной ориентации и диапазон допусков 20° для вертикальной ориентации.
Стыкуемая опалубка в данной системе может содержать в качестве опции датчик ориентации, причем он связан с датчиком сигнала позиционирования. За счет этого информация об ориентации может считываться датчиком ориентации и через передатчик передаваться на приемник. На приемнике имеется тогда достаточно информации, чтобы определить как ориентацию, так и, возможно, в зависимости от ориентации положение стыкуемой опалубки.
Передатчик или метка стыкуемой опалубки может содержать в другом варианте также 3D-гирометр (3D-гироскоп), 3D-магнетометр и/или 3D-акселерометр (датчик ускорения). Опалубки поставляются, в основном, определенной ширины и высоты. Примерами такой ширины являются 30 см, 45 см, 60 см, 90 см и 135 см. Примерами такой высоты являются 135 см, 270 см и 330 см. На стройплощадке может вполне произойти так, что две или более опалубок используются для того, чтобы получить иную высоту или ширину. Например, можно было бы составить опалубки шириной 45 см и 90 см, чтобы получить опалубку шириной 135 см. Чтобы использовать такую систему для применения, согласно изобретению, можно определить не только двухмерную ориентацию (магнетометр, тесламетр), но и положение в трехмерном пространстве. Если следует повернуть опалубку, чтобы ширина стала высотой, а высота - шириной, то можно определить трехмерную ориентацию, чтобы точнее определить положения стыковки.
Такого рода определение ориентации в трехмерном пространстве дает дополнительно тот положительный эффект, что можно обнаружить даже опалубку, лежащую горизонтально плашмя или штабелем. Лежащие горизонтально плашмя опалубки можно, в принципе, приравнять к находящимся в положении покоя, т.е. неактивным опалубкам. Как только будет обнаружено положение покоя, можно, следовательно, рассчитать и с помощью цифровой модели выяснить, найдет ли еще применение опалубка или ее можно вывезти. Если, следовательно, будет обнаружена лежащая горизонтально плашмя опалубка, то ее можно в цифровой системе перевести в неактивную. Положение неактивной опалубки определяется также через ее геометрические данные. Поскольку точное определение положения лежащих горизонтально плашмя опалубок не имеет первостепенного значения, а лежащие горизонтально плашмя опалубки визуально легко обнаружить, достаточно приблизительного определения положения, в частности, поскольку лежащие горизонтально плашмя опалубки из-за своего низкого положения часто не имеют визуального контакта (Line of Sight, LoS) с приемниками, так что, начиная с того момента, когда нет контакта ни с одним приемником, опалубке может быть присвоена вероятность того, что она находится в положении покоя. У поставленных связок (например, штабелированные друг на друге опалубки) самая верхняя опалубка может восприниматься как находящаяся в положении покоя. Нижележащие горизонтально плашмя опалубки могут быть обнаружены лишь с трудом или вообще не обнаружены, т.к. визуальный контакт нарушен вышележащей горизонтально плашмя опалубкой. Поэтому первую опалубку необходимо приподнять, чтобы можно было обнаружить нижележащую горизонтально плашмя опалубку. Возможна также отметка в передатчике или метке вышележащей горизонтально плашмя опалубки, какие опалубки находятся ниже. Кроме того, можно также разместить на поддоне или самой связке метку или передатчик, в которой/котором хранится информация об опалубках. Эти данные могут обрабатываться при поставке и начиная с визуального контакта по меньшей мере с одним приемником. При разборке штабеля опалубки, приводимые в положение покоя, могут быть вовремя обнаружены. Таким образом, можно обнаружить вероятный порядок разборки штабеля и сохранить его в цифровой системе.
Согласно одному примеру выполнения предложенного способа, сигнал позиционирования вместе с геометрией стыкуемой опалубки и/или с информацией об ориентации может быть передан от стыкуемой опалубки на приемник. При этом в сигнале позиционирования может содержаться определение геометрии опалубки или ссылка на одно из нескольких возможных определений геометрии или идентификация опалубки, позволяющая сделать вывод о геометрии и связанная, например, с определением геометрии.
В соответствии с этим в предложенной системе блок согласования может быть связан с базой геометрических данных о хранящихся в памяти геометриях стыкуемой и по меньшей мере одной существующей опалубок. Применение такой базы геометрических данных целесообразно тогда, когда используются несколько разных геометрий.
Если информации об ориентации отсутствует, или чтобы избежать передачи ошибок при определении положения, в предложенной здесь системе передатчик может быть расположен центрированно на стыкуемой опалубке. Это значит, что передатчик сигнала позиционирования расположен в основном в середине тыльной стороны опалубки (т.е. стороны, обращенной от бетона или другого используемого стройматериала) и, по меньшей мере, горизонтально центрирован в плоскости этой боковой поверхности.
Помимо этого, изобретение относится также в общем к способу определения положения стыкуемой опалубки, включающему в себя:
- определение числа опорных точек с прямой визуальной связью (т.е. сигнальной связью без помех или с малыми помехами, см. выше) со стыкуемой опалубкой и
- осуществление способа по одному из описанных выше вариантов, если выявленное число опорных точек меньше трех или двух.
Условное применение описанного выше способа обеспечивает дифференцирование и комбинацию с другими, возможно, более точными способами позиционирования. Если таковые имеются в распоряжении, то можно отказаться от представленных здесь способов определением с возможно более сложным и/или более неточным расчетом.
Если выявленное число опорных точек составляет по меньшей мере три, то положение стыкуемой опалубки можно определить на основе расстояний по меньшей мере до трех опорных точек и присвоить ему вероятность. Как только по меньшей мере три опорные точки будут иметь визуальную связь в смысле сигнальной связи без помех или с малыми помехами со стыкуемой опалубкой, положение этой опалубки можно геометрически определить однозначно, независимо от положения других опалубок. Выявленное таким образом положение может быть ассоциировано с вероятностью единица, чтобы выразить, что для определения положения не потребовались предположения об идентичности, геометрии и/или положении опалубки.
Выявленному одним из описанных выше способов положению стыкуемой опалубки (т.е. на основе возможных положений стыковки) можно в этой связи присвоить вероятность меньше единицы, при этом учитывается вероятность, присвоенная по меньшей мере одной существующей опалубке, с которой стыкуется стыкуемая опалубка. За счет этого ненадежность положения, выявленного на основе нескольких предположений, можно выразить количественным параметром. В принципе, вероятность снижается при увеличении числом сделанных предположений. Например, присвоенную существующей опалубке вероятность можно учесть в качестве коэффициента умножения для новой вероятности. Результирующую вероятность положения стыкуемой опалубки можно учесть при оценке согласуемости. Например, при недостижении предельного значения вероятности может подаваться предупреждение, или может быть отвергнута установка в соответствующем положении (т.е. не сохраняться в памяти).
Пониженная вероятность может быть определена в качестве опции в зависимости от отклонения выявленного расстояния от расстояния, соответствующего хранящемуся в памяти стыкованному положению. За счет этого в параметре вероятности может быть отражено, насколько велико было влияние сделанных предположений (положения стыковки) по сравнению с измерением (расстояние). Большее отклонение расстояний соответствует, тем самым, меньшей вероятности. В соответствии с другим вариантом способ может осуществляться на основе хранящейся в памяти последовательности монтажа нескольких опалубок и соответственно выявленных положений и/или расстояний, причем в случае нескольких возможных положений стыковки стыкуемой опалубки оценивается вероятность возможных положений стыковки на основе других хронологически последовательно установленных опалубок, и в качестве положения стыкуемой опалубки определяется то из возможных положений стыковки, которому присвоена наибольшая вероятность. Таким образом, после установки нескольких опалубок может быть комбинирована собранная позиционная информация всех измерений расстояний, и на этой основе могут быть скорректированы положения всех опалубок.
В качестве опции определение положения стыковки может включать в себя:
- определение геометрической конфигурации соединения по меньшей мере для двух вариантов положения;
- определение положения стыковки в рамках определения положения последующей опалубки, причем положение последующей опалубки определяется в положении стыковки, согласуемом с геометрической конфигурацией соединения.
В этой связи в цифровой системе могут быть упрощенно изображены, например, определенные формы или особые формы. Например, угловой элемент может иметь упрощенно геометрические данные прямоугольника. Соединительные поверхности являются здесь решающими для упрощенной геометрической конфигурации, т.к. соединительные поверхности должны лежать всегда по границам упрощенной геометрической конфигурации. После расположения других опалубок вариант с точными положением и ориентацией опалубки можно определить точнее. Дугообразный элемент можно было бы изобразить, например, в форме прямоугольника. Теперь можно было бы определить положение этого упрощенно изображенного прямоугольника. Однако здесь все еще существовала бы неопределенность, правильно ли был установлен опалубочный элемент. Чтобы предотвратить эту неопределенность, точную ориентацию можно было бы изобразить с помощью 3D-магнетометра. Возможны также другие формы подобных упрощенных геометрических конфигураций или геометрических конфигураций соединения. В качестве примеров следует назвать ромбоиды, параллелограммы, дельтоиды и т.д. Кроме того, геометрическая конфигурация соединения может быть также трехмерной. Примерами этого являются прямоугольные параллелепипеды, причем боковые поверхности такого прямоугольного параллелепипеда могут быть конгруэнтными с соединительными поверхностями стыкуемой опалубки (определяемой по положению). В принципе, геометрическую конфигурацию соединения можно рассматривать как подстановочный символ (блок) для еще не на 100% определенных положения и ориентации опалубки. Далее можно было бы через геометрию опалубки создать поле допусков. Это можно было бы изобразить через минимальную геометрию опалубки, имеющую минимальные геометрические размеры допусков, и максимальную геометрию опалубки, имеющую максимальные геометрические размеры допусков. Между этими обеими геометриями опалубки образовалось бы, тем самым, поле допусков. Оно представляет неопределенность точного положения граничных поверхностей (и, тем самым, соединительных поверхностей) в пространстве в каждой точке опалубки. Геометрически поле допусков соответствует оболочке определенной толщины (расстояние между минимальной и максимальной геометриями опалубки; необязательно должно быть везде одинаковым), в которой ожидается фактическая граничная поверхность. При этом толщина обратно пропорциональна точности, с которой известны положение и ориентация граничной поверхности.
На опалубке могут быть размещены также несколько передатчиков, меток и/или датчиков. Это может быть особенно предпочтительным для повышения точности расположения, т.к. могут быть зарегистрированы по меньшей мере два отклика на каждую отслеживаемую опалубку. Далее регистрация по меньшей мере двух передатчиков может дать также информацию о положении опалубки и служить в качестве сравнения для зарегистрированной информации о положении посредством датчиков положения.
У прямоугольных опалубок передатчики, метки и/или датчики размещаются в близких к углам зонах опалубки предпочтительно по диагонали напротив друг друга. Это имеет то преимущество, что независимо от поворота опалубки передатчик, метка и/или датчик находится всегда в ее верхней части.
Дополнительно следует упомянуть, что соединительные поверхности, положения стыковки или стыковочные поверхности опалубок могут представлять любые периферийные поверхности, например у тех опалубочных систем, которые рассчитаны так, чтобы опалубки можно было бетонировать в стоячем, а также в повернутом положениях. В качестве примера здесь следует назвать стоячую опалубку, которая была повернута на 90°.
Изобретение более подробно поясняется ниже на особенно предпочтительных примерах его осуществления, которыми оно, однако, не должно быть ограничено, и со ссылкой на чертежи, на которых изображены:
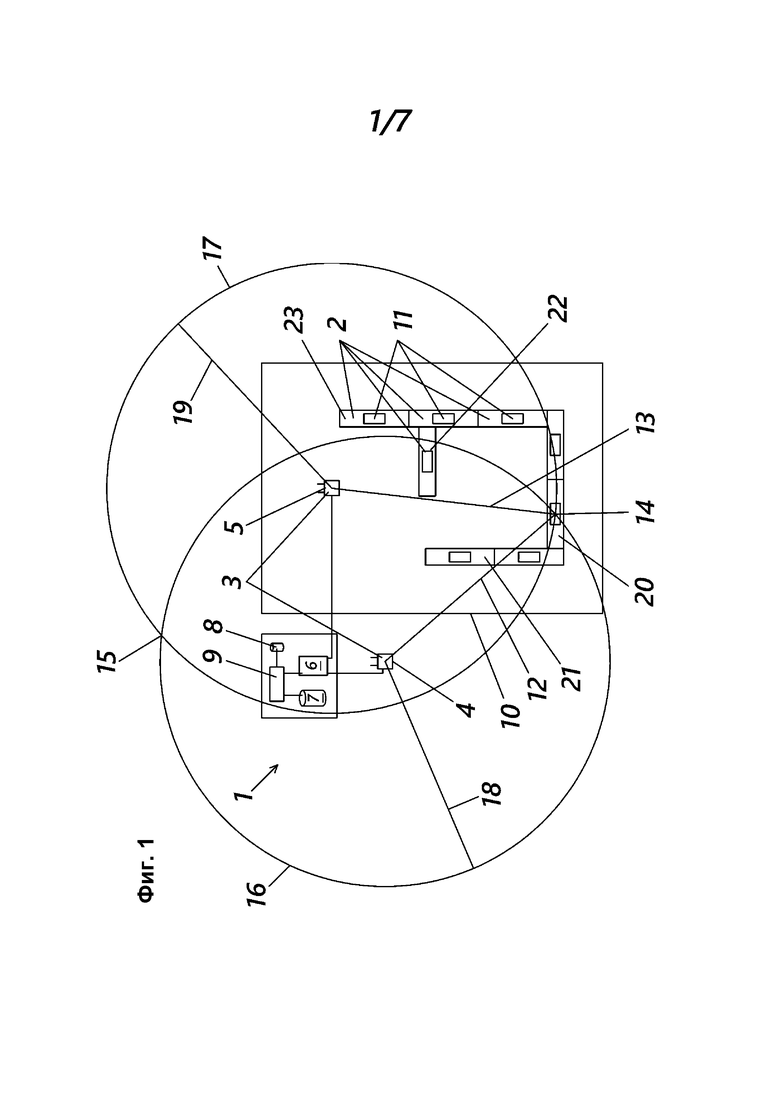
фиг. 1: схематично в плане система определения положения нескольких опалубок на стройплощадке с двумя приемниками;
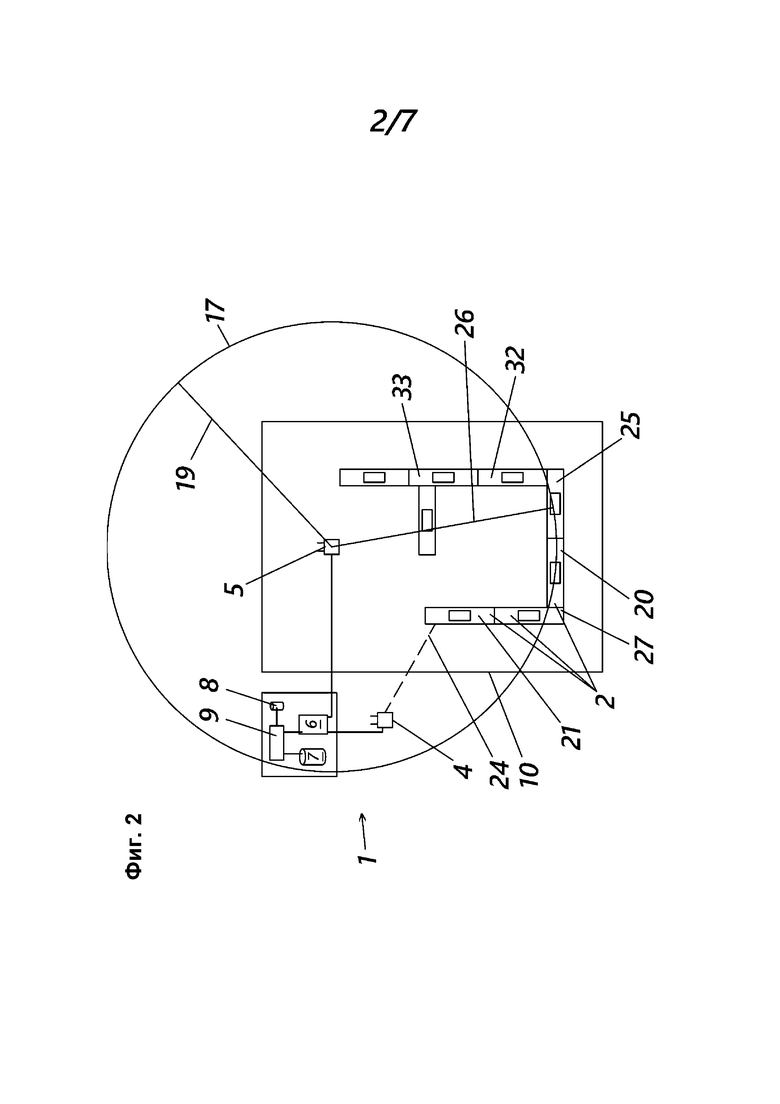
фиг. 2: вид аналогичный фиг. 1, но с прерванной визуальной связью;
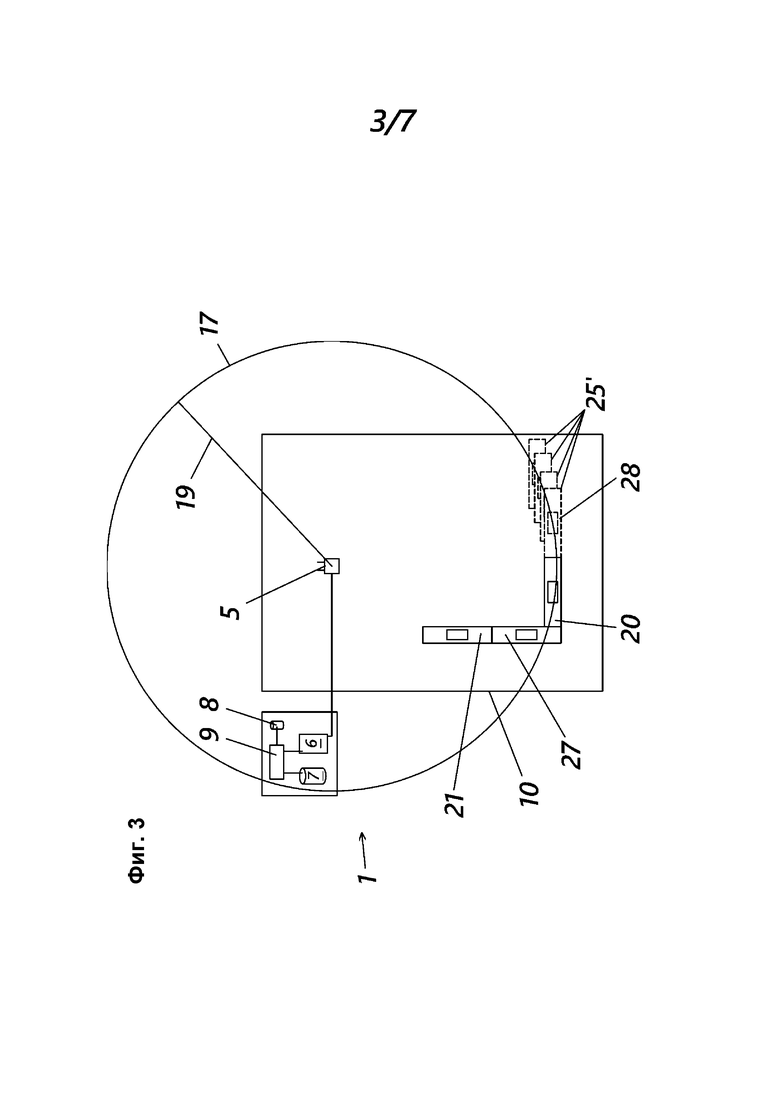
фиг. 3: схематично в плане упрощенная система из фиг. 1 в момент установки четвертой опалубки с несколькими возможными положениями;
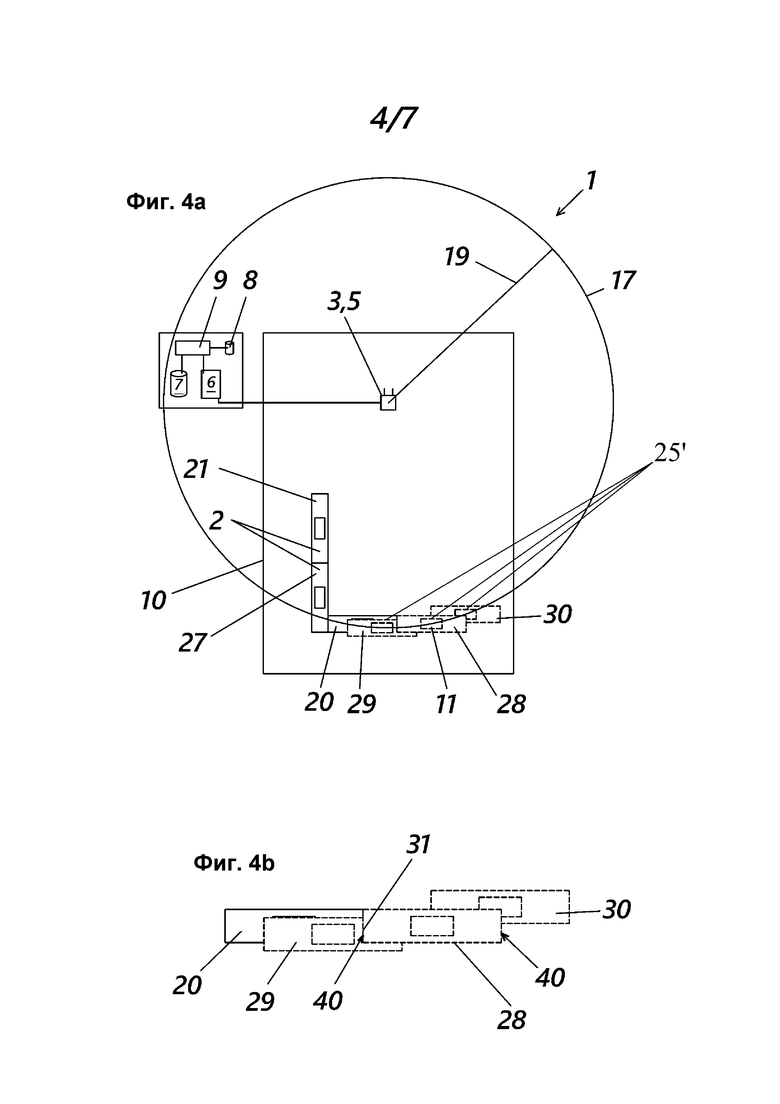
фиг. 4а, 4b: соответственно вид аналогичный фиг. 3 или его подробный вид, причем среди возможных положений опалубки выделено положение стыковки;
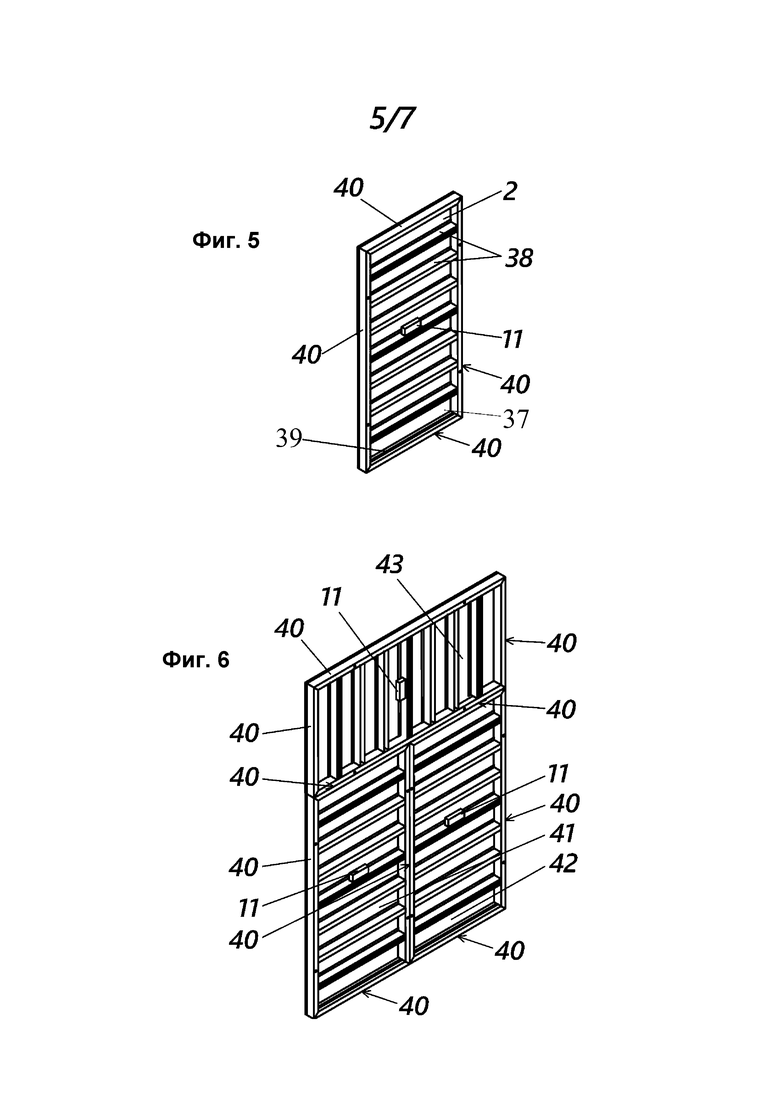
фиг. 5: схематично, элемент опалубки - элемент с передатчиком или меткой;
фиг. 6: схематично, несколько составленных опалубочных элементов, каждый из которых с передатчиком или меткой, причем один опалубочный элемент повернут на 90°;
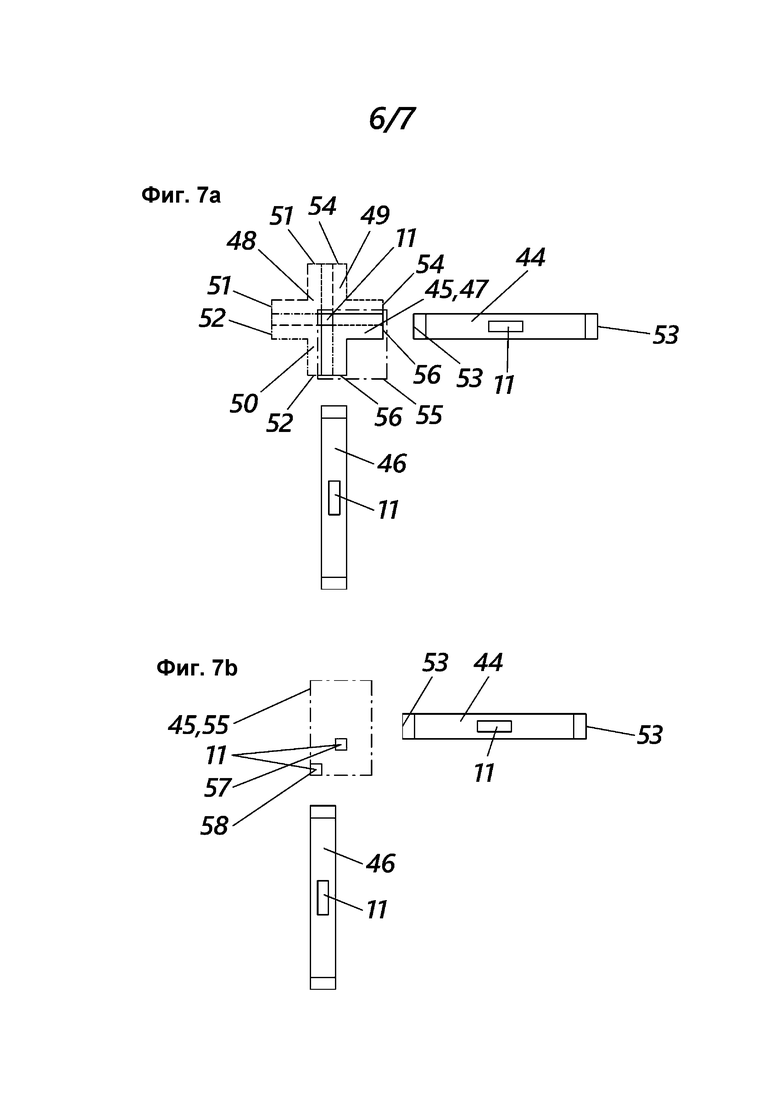
фиг. 7а: схематично, две опалубки с угловым элементом, причем угловой элемент имеет четыре разных возможных положения ориентации;
фиг. 7b: схематично, две опалубки и цифровая геометрическая конфигурация соединения углового элемента;
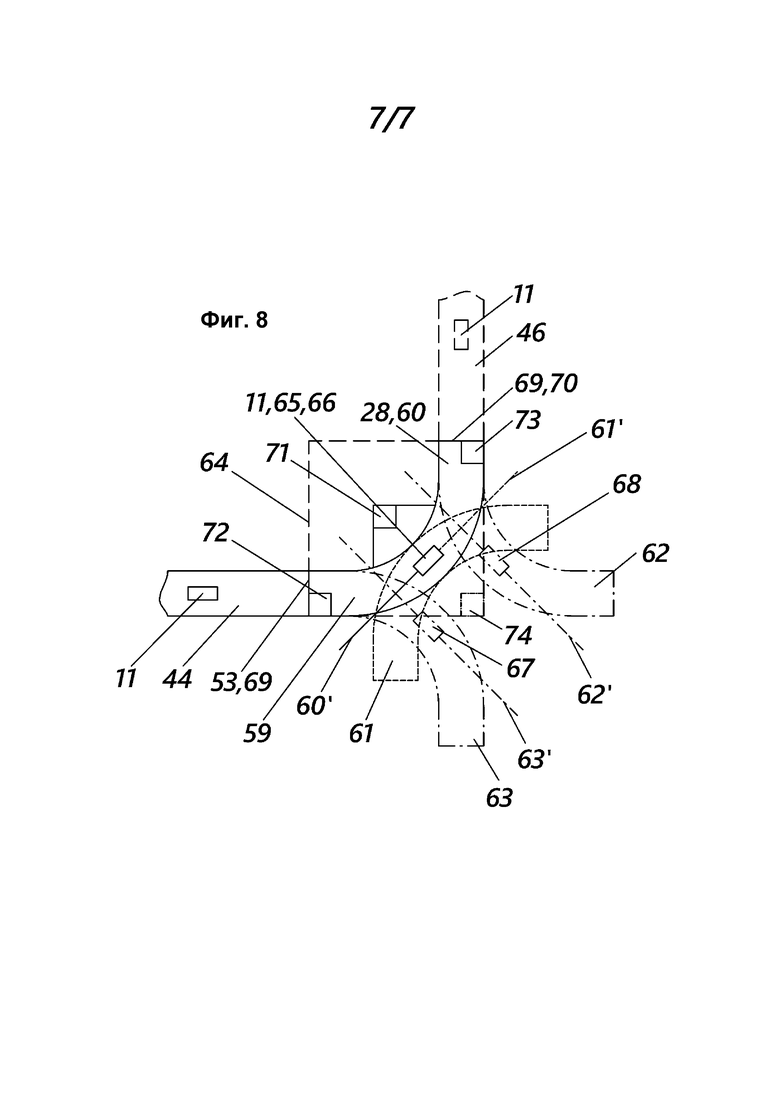
фиг. 8: вид аналогичный фиг. 7а, 7b, но показан дугообразный элемент с четырьмя положениями стыковки и цифровой геометрической конфигурацией соединения.
На фиг. 1 изображена система 1 определения положения опалубок. Система 1 включает в себя несколько опалубок 2, две опорные точки 3 с соответствующим приемником 4, 5, базу 7 данных положения, базу 8 геометрических данных и блок 9 согласования.
Система 1 используется на обозначенной прямоугольником стройплощадке 10. При этом используется несколько опалубок 2 (в этом примере в общей сложности восемь) с частично разными габаритами. Каждая опалубка 2 оборудована передатчиком 11 сигнала позиционирования. Положения передатчиков 11 на опалубках 2 показаны здесь лишь грубо схематично. В действительности передатчики 11 расположены центрировано в середине тыльной стороны соответствующей опалубки 2 (см. фиг. 5). Кроме того, опалубки 2 содержат датчик ориентации. Датчики ориентации соединены с передатчиками 11 опалубок 2 (например, интегрированы в виде блока в корпусе). При работе блок управления передатчика 11 считывает в равные промежутки времени от соединенного датчика ориентации информацию об ориентации и направляет ее через передатчик 11 в виде части передаваемого сигнала позиционирования на приемник или приемники 4, 5.
Переданные передатчиками 11 сигналы позиционирования могут быть приняты обоими приемниками 4, 5 в опорных точках 3. Положения опорных точек 3 известны системе 1 и были инициализированы, например, при строительстве посредством DGNSS или сопоставимых способов. Блок 6 определения расстояний соединен с обоими приемниками 4, 5 (например, через сетевое соединение, например мобильную сеть передачи данных) и предназначен для определения соответствующего расстояния между опалубками 2 и связанными с ними через визуальную связь опорными точками 3. При этом расстояние определяется соответственно на основе переданного передатчиком 11 и принятого приемником 4, 5 сигнала позиционирования. Для однозначного определения позиции опалубок в двухмерном пространстве необходимы без дополнительных краевых условий, по меньшей мере, расстояния до трех опорных точек, чтобы осуществить триангуляцию.
В примере на фиг. 1 показаны только два приемника 4, 5 в соответствующих двух опорных точках 3. Предположив известную высоту положения опалубок 2 (в известной горизонтальной плоскости), можно ограничить положение одной опалубки 2 на основе двух измеренных расстояний 12, 13 двумя возможностями, как это обозначено точками 14, 15 пересечения описанных окружностей 16, 17 обеих опорных точек 3. Описанные окружности 16, 17 имеют соответственно радиус 18, 19 расстояния 12, 13, выявленного от соответствующей опорной точки 3 на основе принятого приемником 4, 5 сигнала позиционирования. Это значит, что существуют две возможные позиции в плоскости, которые имеют от обеих опорных точек 3 соответственно выявленные расстояния 12, 13. С дополнительным краевым условием локального ограничения стройплощадки 10 можно исключить точку 15 пересечения в качестве возможной позиции, так что искомое положение опалубки 20 можно с этими предположениями и краевыми условиями однозначно определить в точке 14 пересечения.
В данном примере только три опалубки 21, 22, 23 имеют прямую визуальную связь с обоими приемниками 4, 5. На фиг. 2 показана прерванная визуальная связь 24 между первым приемником 4 и опалубкой 25.
Поэтому при монтаже опалубок 2 положение этой опалубки 25 не удастся определить по двум выявленным расстояниям, если опалубка 25 устанавливается после опалубки 21. Напротив, известно только расстояние 26 до опорной точки 3 со вторым приемником 5. В соответствии с этим на фиг. 3 обозначена только описанная окружность 17 этой опорной точки 3. Вдоль этой описанной окружности 17 или сигнальной окружности возникает бесконечно много теоретических позиционных возможностей 25’, даже в известной плоскости и в пределах стройплощадки 10. Простоты ради этот пример исходит из того, что имеется информация о положении новой устанавливаемой опалубки 25, так что принципиальная ориентация известна (в плане горизонтально и параллельно короткой стороне стройплощадки 10).
Здесь вступает в действие предложенное изобретение, основанное на том факте, что положения уже существующих опалубок 20, 21, 27, установленных по времени перед стыкуемой опалубкой 25, позволяют сделать выводы о вероятной позиции новой стыкуемой опалубки 25. Чтобы можно было сделать эти выводы, база 7 позиционных данных во время установки опалубок 2 непрерывно сохраняет положения установленных опалубок 2, так что в показанный на фиг. 3 момент положения существующих опалубок 20, 21, 27 сохранены в базе 7 позиционных данных. Кроме того, в базе 8 геометрических данных хранятся геометрии существующих опалубок 20, 21, 27 (поскольку они при установке принимаются или присваиваются), и каждое хранящееся в базе 7 позиционных данных положение опалубки связано с геометрией соответствующей опалубки. Блок 9 согласования предназначен для определения положения 28 стыковки новой устанавливаемой стыкуемой опалубки 25 с одной из прежде уже установленных существующих опалубок 20, 21, 27 и для сохранения выявленного положения 28 стыковки в базе 7 позиционных данных в качестве положения стыкуемой опалубки 25, согласующегося с выявленным расстоянием (соответствующим радиусу 19 описанной окружности 17) посредством блока 6 определения расстояний. Для этого блок 9 согласования дополнительно связан с базой 8 геометрических данных, хранящей геометрические размеры опалубок, и с базой 7 позиционных данных.
Граничное условие положения 28 стыковки, согласующееся с выявленным расстоянием, точнее показано на фиг. 4а и 4b. Из трех (а фактически их бесконечно много) вариантов положений 25’ новой устанавливаемой стыкуемой опалубки 25 вариант положения 29 не рассматривается уже вследствие несовместимости с существующей опалубкой 20 и может быть исключен. Такая несовместимость может быть обнаружена на основе положения и ориентации существующих опалубок 20, 21, 27. Другой вариант положения 30 соответствовал бы зазору и смещению (поперек плоскости опалубки) между ближайшей из существующих опалубок 20 и новой устанавливаемой опалубкой 25. При допущении, что опалубки, в принципе, должны примыкать друг к другу, тогда, в частности, если вследствие геометрии новой устанавливаемой опалубки требуется соединение 31 (соответствующее стыковке) на одной или обеих сторонах с подходящими соединительными поверхностями 40, этот вариант положения 30 также может быть исключен. Таким образом, только один вариант положения, который является положением 28 стыковки со следующей из существующих опалубок, может быть определен, в конечном счете, как наиболее вероятное положение новой устанавливаемой опалубки 25 и сохранен в базе 7 позиционных данных. В положении 28 стыковки возникает соединение 31 за счет стыковки двух соединительных поверхностей 40 смежных опалубок 20, 25. Этому сохраненному положению присваивается, например, пониженная вероятность, составляющая 0,81, чтобы отобразить неопределенность вследствие того, что использовалось только одно измерение расстояния и поскольку положение существующей опалубки 20, с которой в положении 28 стыковки стыкуется стыкуемая опалубка 25, уже само по себе является положением стыковки и было определено на основе только одного расстояния (из-за отсутствия визуальной связи с приемником 4), и потому ему присвоена вероятность, составляющая 0,9 (0,81 = 0,9 × 0,9).
Без информации об ориентации положения стыковки также можно рассматривать и сравнить с другими ориентациями новой устанавливаемой опалубки, например здесь в показанной схеме положение новой устанавливаемой опалубки вертикальное (т.е. параллельно длинной стороне объекта 10). Однако потребовалось бы значительно меньшее расстояние между передатчиком 11 и опорной точкой 3, так чтобы его также можно было бы исключить без информации об ориентации вследствие несовместимости с выявленным расстоянием (соответствует радиусу 19).
Граница локальной области может привести к отбраковке положений стыковки. Например, для опалубки 32, установленной после опалубки 25 (см. фиг. 2), можно было бы исключить, например, положение стыковки под опалубкой 25, поскольку опалубка выходила бы тогда за пределы объекта строительства 10. Присвоенная этой опалубке 32 вероятность при использовании положения стыковки с опалубкой 25 будет еще меньше 0,81, например 0,73 (= 0,81 × 0,9 = 0,93), поскольку речь идет о третьем положении стыковки, использующем только одно измерение расстояния. В качестве предельного значения вероятности можно было бы предположить, например, 0,7, чтобы по меньшей мере каждая четвертая опалубка имела визуальную связь по меньшей мере с двумя приемниками, с тем чтобы можно было определить положение.
При установке опалубки 33 (см. фиг. 2) оба приемника 4, 5 будут (временно) принимать сигнал позиционирования, поскольку эта опалубка 33 при установке в описанной здесь последовательности имеет прямую визуальную связь с обоими приемниками 4, 5. Обе визуальные связи прерываются опалубкой 22, как только она начинает устанавливаться. При установке опалубки 33 определяется положение на основе выявленного расстояния до обеих опорных точек 3, и положению опалубки 33 снова будет присвоена вероятность, составляющая единицу. Затем можно проверить, была ли опалубка 32 позиционирована в положении стыковки опалубки 33, и, при необходимости, скорректировать положение опалубки 32 и присвоить более высокую вероятность (например, 0,9). Положению опалубки 25, устанавливаемой перед опалубкой 32, можно было бы присвоить вероятность 0,95 (квадратный корень из 0,9 + 0,9), поскольку это положение подтверждено одним расстоянием и двумя положениями стыковки.
На фиг. 5 более подробно изображена тыльная сторона опалубки 2 со схематично обозначенным передатчиком 11. Здесь опалубка 2 состоит из фанеры в средней части 37 с полимерным покрытием, нескольких рамных профилей 38 из алюминия и накладки 39 для соединения элементов. Однако возможны также другие материалы для опалубочной плиты или рамных профилей 38, а также другие варианты соединения. Кроме того, все четыре периферийные поверхности описаны как соединительные поверхности 40 (две видны, две скрыты). Причина этому в том, что со всеми четырьмя соединительными поверхностями 40 может быть стыкована дополнительная опалубка в зависимости от ориентации опалубки 2. В данном варианте соединительные поверхности 40 выполнены в середине профилированными, так что жидкий бетон в случае протечки может стекать в образующуюся полость. Однако возможны также другие формы соединительных поверхностей 40, например плоские. По центру на тыльной стороне опалубки размещен передатчик 11. Этот передатчик 11 размещен точно в центре опалубочной поверхности, т.е. в точке пересечения осей симметрии, так что в качестве основы для расчетов измеренные данные гироскопа и/или магнетометра могут быть комбинированы с геометрическими данными опалубки 2 и, таким образом, можно определить точное положение соединительных поверхностей 40. Другой возможностью (не показана) было бы размещение передатчика 11 в углу тыльной стороны опалубки 2. С помощью 3D-магнетометра можно было бы определить точное положение опалубки 2. Недостаток здесь в том, что опалубку 2 следовало бы повернуть предпочтительно так, чтобы передатчик 11 находился как можно дальше сверху, а не на нижнем краю опалубки 2, т.к. здесь выше вероятность того, что прием будет прерван (LoS).
На фиг. 6 изображены три опалубки 41, 42, 43, соединенные между собой. Соединительные элементы здесь не показаны. В качестве соединительных элементов могут найти применение традиционные, известные в уровне техники решения, например быстрозажимные приспособления, затяжки, натяжные зажимы, скобы, натяжные замки, соединители элементов. Помимо двух стоячих опалубок 41, 42 видна также лежащая на них опалубка 43. Эта опалубка 43 повернута на 90° относительно вертикально стоящей опалубки, и боковая соединительная поверхность 40 стыкована с обеими торцевыми соединительными поверхностями 40 стоячих опалубок 41, 42. То, что опалубка 43 повернута на 90°, было уже обнаружено гироскопом и/или 3D-магнетометром и/или датчиком ускорения (акселерометром). За счет этого обнаружения положения 28 стыковки этой повернутой на 90° опалубки 43 актуализируются и обнаруживаются в цифровой системе.
На фиг. 7а изображены уже позиционированная опалубка 44 и угловой элемент 45 в положении стыковки, а также последующая, т.е. позднее стыкуемая с угловым элементом, опалубка 46. Опалубки 44, 46 и угловой элемент 45 оснащены соответственно передатчиком 11. Положение углового элемента 45 нельзя однозначно определить только с помощью передатчика 11 или даже магнетометра. Например, зеркально симметричные варианты положения углового элемента 45 на прямой «север-юг» нельзя различить друг от друга (симметричные относительно оси/симметричные относительно прямой). Хотя, с помощью информации об «угловом элементе» (т.е. соответствующей геометрии этого специального варианта опалубки) определено, что варианты положения 47, 48, 49, 50 (точнее, варианты положения и ориентации) находятся под углом 90° друг к другу, однако невозможно однозначно установить, какой из четырех вариантов положения 47-50 является фактическим положением углового элемента 45. Варианты положения 48, 50 с соединительными поверхностями 51, 52 вследствие известной соединительной поверхности 53 существующей опалубки 44 можно исключить. Чтобы можно было исключить также вариант положения 49 с соединительной поверхностью 54, при использовании простого магнетометра (датчика положения) целесообразно дождаться определения положения последующей опалубки 46. Это может быть представлено в цифровом виде с помощью временной геометрической конфигурации соединения 55. Для наглядности геометрическая конфигурация соединения 55 показана на фиг. 7а слегка увеличенной. Обычно границы лежат точно по геометрическим размерам опалубки, т.е. по соединительным поверхностям 54, 56 остальных вариантов положения 47, 49 (на фиг. 7а для лучшего понимания показана геометрическая конфигурация соединения 55 в предположении, что возможен только один вариант положения 47). Несколько геометрических конфигураций соединения 55 также могут быть изображены по отдельности или в совокупности, чтобы отобразить конкретные варианты положения углового элемента 45, по меньшей мере, временно. Как только последующая опалубка 46 смонтирована, и можно сделать другие логические выводы о положении углового элемента 45, геометрическая конфигурация соединения 55 заменяется известной геометрией углового элемента 45. Передатчик 11 расположен в изображенном варианте в угловой зоне углового элемента 45. Это имеет, в частности, пространственные и конструктивные причины.
На фиг. 7b изображено принципиально аналогичное фиг. 7а расположение. Угловой элемент 45 изображен здесь в виде прямоугольной геометрической конфигурации соединения 55. Кроме того, изображены датчики 11 в разных позициях 57, 58 размещения (на практике используется только один датчик в одной позиции размещения). За счет стыковки по меньшей мере одной последующей опалубки 46 ориентацию углового элемента 45 можно впоследствии конкретизировать (фиг. 7а). Как видно по форме геометрической конфигурации соединения 55, варианты положения 48, 50 были исключены уже из-за соединительных поверхностей 53 существующей опалубки 44 (геометрическая конфигурация соединения 55 на фиг. 7b включает в себя, тем самым, оба варианта положения 47, 49). Позиция 58 размещения датчика 11 показывает в этом примере идеальное положение на угловом элементе 45, т.к. вариант положения 49 в этом случае также можно было бы исключить из-за положения датчика 11, если определение позиции датчика 11 достаточно точное.
На фиг. 8 изображена опалубка 59, стыкуемая с существующей опалубкой 44 в положении 28 стыковки, причем стыкуемая опалубка 59 является дугообразным элементом с четырьмя вариантами положения 60-63, соответствующие положения осей 60’-63’ на каждое положение 60-63, цифровая геометрическая конфигурация соединения 64, последующая опалубка 46 (обозначена штриховой линией) и различные положения 65-68 датчика при каждом варианте положения 60-63 и в зависимости от конструктивных и/или позиционных причин. Такой позиционной причиной может быть то, что передатчик 11, размещенный в близкой к углу зоне, уже прилегает непосредственно к двум точкам соединительных поверхностей 69 опалубки 59 и тем самым более предпочтителен, чем передатчик 11, размещенный, например, смещенно от центра, т.е. не в точке пересечения диагоналей поверхности опалубки. Варианты положения 62, 63 здесь можно исключить из-за ориентаций осей 62’, 63’ (магнетометр, компас). Однако вариант положения 61 имеет, по существу, ориентацию оси 61’, конгруэнтную ориентации оси 60’ варианта положения 60, соответствующего положению 28 стыковки. В зависимости от геометрии стыкуемой опалубки 59 положение 61 нельзя с уверенностью исключить из-за ориентации оси 61’. Посредством регистрации последующей опалубки 46 и соответствующей соединительной поверхности 70 можно, по меньшей мере, впоследствии исключить положение 61 или проверить возможное положение, выявленное на основе предполагаемой геометрии стыкуемой опалубки (что произошло бы, например, в случае изображенного здесь дугообразного элемента). Другой возможностью было бы такое положение передатчика 11, чтобы зеркальная симметрия или поворот опалубки 59 (дугообразного элемента) не приводили к конгруэнтности ориентаций осей 60’, 61’. Примеры таких позиций 71-74 передатчика 11 изображены на фиг. 8. В этих примерах передатчик 11 расположен в геометрической конфигурации соединения 64 в зонах, близких к углам, или в воображаемом центре.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
| КОМПЕНСИРУЮЩАЯ ЦЕПЬ ДЛЯ НЕЙТРАЛИЗАЦИИ МАГНИТНОГО ПОЛЯ | 2014 |
|
RU2661996C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ ВСПОМОГАТЕЛЬНЫХ ДАННЫХ, ОТНОСЯЩИХСЯ К СИСТЕМАМ СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ | 2001 |
|
RU2332680C2 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2391229C1 |
| Способ динамической сборки агрегатных единиц планеров летательных аппаратов и устройство для его осуществления | 2018 |
|
RU2695017C1 |
| ЛОКАТОР ЛИНИИ ПОДЗЕМНЫХ КОММУНИКАЦИЙ | 2020 |
|
RU2792068C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБРАБОТКИ СЕГМЕНТА БЕТОННОЙ БАШНИ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2012 |
|
RU2583392C2 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| Телематический прибор | 2019 |
|
RU2736321C1 |
Изобретение относится к средствам для определения положения опалубки. Сущность: система определения положения опалубки (2) содержит стыкуемую опалубку (25') с передатчиком (11) сигнала позиционирования; опорную точку (3) с приемником (5) сигнала позиционирования; блок (6) определения расстояний, предназначенный для определения расстояния между стыкуемой опалубкой (25') и опорной точкой (3) на основе сигнала позиционирования, переданного передатчиком (11) и принятого приемником (5); базу (7) позиционных данных с хранящимися в памяти положениями существующей опалубки (20); блок (9) согласования. Причем блок (9) согласования предназначен для определения положения (28) стыковки стыкуемой опалубки (25') с существующей опалубкой (20), согласующегося с расстоянием, выявленным с помощью блока (6) определения расстояний, на основе геометрий стыкуемой опалубки (25') и существующей опалубки (20). Кроме того, блок (9) согласования предназначен для сохранения в базе (7) позиционных данных выявленных положений (28) стыковки в качестве положения стыкуемой опалубки (25'). Технический результат: повышение точности определения положения опалубки. 2 н. и 13 з.п. ф-лы, 8 ил.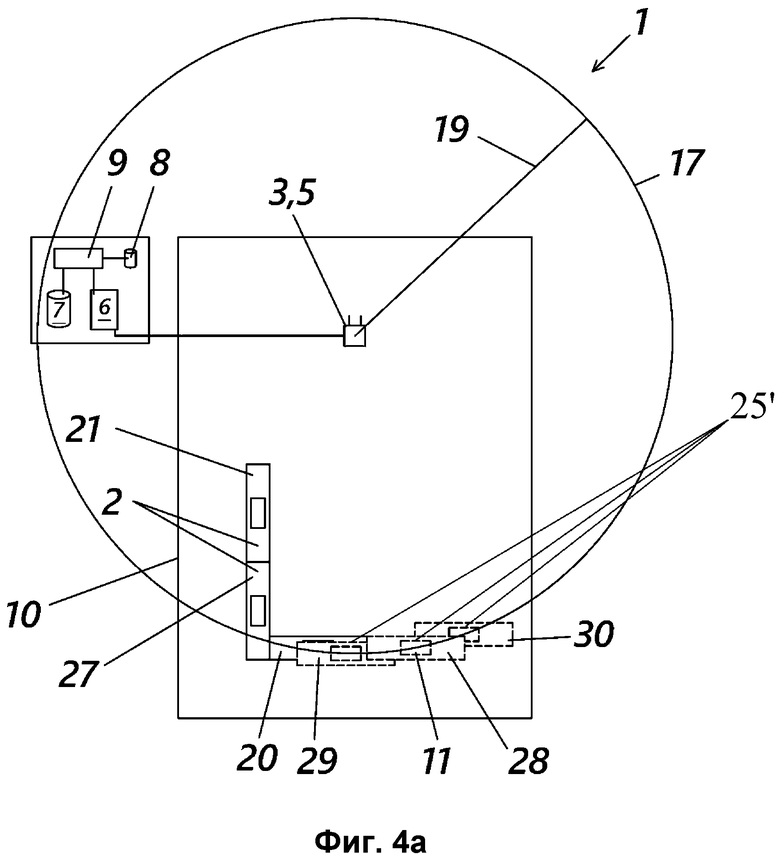
1. Способ определения положения опалубки (25), стыкуемой по меньшей мере с одной существующей опалубкой, характеризующийся тем, что:
передают сигнал позиционирования от указанной стыкуемой опалубки (25);
принимают переданный сигнал позиционирования приемником (5) по меньшей мере в одной опорной точке (3);
определяют расстояние (26) между указанной стыкуемой опалубкой (25) и указанной по меньшей мере одной опорной точкой (3) на основе принятого сигнала позиционирования;
определяют для указанной стыкуемой опалубки (25) положение (28) стыковки с указанной по меньшей мере одной существующей опалубкой (20), согласующееся с выявленным расстоянием (26), на основе геометрий стыкуемой опалубки и указанной по меньшей мере одной существующей опалубки; и
сохраняют в памяти выявленное положение (28) стыковки в качестве положения указанной стыкуемой опалубки (25).
2. Способ по п. 1, отличающийся тем, что при определении положения (28) стыковки:
определяют все возможные положения (28) стыковки стыкуемой опалубки (25) с указанной по меньшей мере одной существующей опалубкой (20);
определяют для каждого из выявленных возможных положений (28) стыковки соответствующее расстояния до указанной по меньшей мере одной опорной точки (3);
определяют в качестве согласующегося с выявленным расстоянием (26) такие положения (28) стыковки, для которых соответствующее расстояние лежит в пределах диапазона допусков вокруг выявленного расстояния (26).
3. Способ по п. 2, отличающийся тем, что при определении положении (28) стыковки ограничивают указанные возможные положения (28) стыковки на основе границы локальной области.
4. Способ по п. 2 или 3, отличающийся тем, что при определении положения (28) стыковки ограничивают возможные положения (28) стыковки на основе информации об ориентации, относящейся к указанной стыкуемой опалубке (25).
5. Способ по любому из пп. 1-4, отличающийся тем, что сигнал позиционирования передают от стыкуемой опалубки (25) на приемник (4, 5) вместе с геометрией стыкуемой опалубки (25) и/или с информацией об ориентации.
6. Способ по любому из пп. 1-5, отличающийся тем, что
определяют число опорных точек (3) с прямой визуальной связью со стыкуемой опалубкой (25) и,
если выявленное число опорных точек (3) меньше трех или двух, выполняют способ по любому из пп. 1-5.
7. Способ по п. 6, отличающийся тем, что если указанное определенное число опорных точек (3) составляет по меньшей мере три, то положение стыкуемой опалубки (25) определяют на основе расстояний до указанных по меньшей мере трех опорных точек (3) и ассоциируют его с вероятностью, составляющей единицу.
8. Способ по п. 6 или 7, отличающийся тем, что положение стыкуемой опалубки (25), определяемое способом по любому из пп. 1-5, ассоциируют с пониженной вероятностью, меньшей единицы, при этом учитывается вероятность, ассоциированная с указанной по меньшей мере одной существующей опалубкой (20), с которой стыкуется указанная стыкуемая опалубка (25).
9. Способ по п. 8, отличающийся тем, что указанную пониженную вероятность определяют в зависимости от отклонения указанного выявленного расстояния (26) от расстояния, соответствующего положению (28) стыковки, хранящемуся в памяти.
10. Способ по любому из пп. 1-9, отличающийся тем, что при определении положения (28) стыковки:
определяют геометрическую конфигурацию соединения (55) по меньшей мере для двух вариантов (47-50) положения;
определяют положение (28) стыковки с учетом определения положения последующей опалубки (46), причем положение последующей опалубки (46) определяют в положении стыковки, согласующемся с указанной геометрической конфигурацией соединения (55).
11. Способ по любому из пп. 1-10, отличающийся тем, что указанный способ выполняют на основе хранящейся в памяти последовательности монтажа нескольких опалубок (2) и соответственно выявленных положений и/или расстояний, причем в случае нескольких возможных положений стыковки для стыкуемой опалубки оценивают вероятность указанных возможных положений (28) стыковки на основе других хронологически последовательно смонтированных опалубок и в качестве положения стыкуемой опалубки определяют положение из указанных возможных положений (28) стыковки, с которым ассоциирована наибольшая вероятность.
12. Система (1) определения положения опалубки (2), содержащая:
стыкуемую опалубку (25) с передатчиком (11) сигнала позиционирования;
по меньшей мере одну опорную точку (3) с приемником (5) сигнала позиционирования;
блок (6) определения расстояний, предназначенный для определения расстояния (26) между стыкуемой опалубкой (25) и по меньшей мере одной опорной точкой (3) на основе сигнала позиционирования, переданного передатчиком (11) и принятого приемником (5);
базу (7) позиционных данных с хранящимися в памяти положениями по меньшей мере одной существующей опалубки (20); и
блок (9) согласования, предназначенный для определения положения (28) стыковки стыкуемой опалубки (25) с существующей опалубкой (20), согласующегося с расстоянием (26), выявленным с помощью блока (6) определения расстояний, на основе геометрий стыкуемой опалубки и указанной по меньшей мере одной существующей опалубки, и для сохранения в базе (7) позиционных данных выявленных положений (28) стыковки в качестве положения стыкуемой опалубки (25).
13. Система (1) по п. 12, отличающаяся тем, что блок (9) согласования связан с базой (8) геометрических данных, которая содержит сохраненные в памяти геометрии стыкуемой опалубки и по меньшей мере одной существующей опалубки.
14. Система (1) по п. 12 или 13, отличающаяся тем, что передатчик (11) расположен центрированно на стыкуемой опалубке (25).
15. Система (1) по любому из пп. 12-14, отличающаяся тем, что стыкуемая опалубка (25) содержит датчик ориентации, причем датчик ориентации связан с передатчиком (11).
| EP 3351699 A1, 25.07.2018 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ПОДВИЖНОЙ ОПАЛУБКИ | 2003 |
|
RU2250323C1 |
| US 2005107934 A1, 19.05.2005. | |||

