Назначение и область применения
Группа изобретений относится к радиолокации и может быть использована в радиолокационных комплексах (РЛК) и радиолокационных системах (РЛС) контроля и управления воздушным движением и управления оружием.
Предшествующий уровень техники
Известен способ и система обработки радиолокационных сигналов заключающиеся в том что, в РЛС для селекции радиолокационных сигналов по дальности, в многоканальной по дальности радиолокационной системе каналы дальности формируются путем равномерного разбиения диапазона однозначной дальности ΔD на N параллельно соединенных и идентичных каналов дальности (каналов обработки радиолокационного сигнала по дальности), каждый из которых имеет размер Δd, где Δd - разрешение по дальности [1, стр. 313, 314, 334], [2, стр. 134-136], [3, стр. 15, 16] (прототип).
Селекция (стробирование) по дальности позволяет измерять расстояние до цели, обеспечивает разрешение целей по дальности и улучшает отношение сигнал/шум (ОСШ), сигнал/фон (ОСФ) примерно прямо пропорционально скважности стробирования по дальности Qcт, которая равна отношению периода повторения Тп и длительности селекторного (стробирующего) импульса τси:

Возможность измерения дальности до цели в РЛС вытекает из постоянства скорости и прямолинейности распространения радиоволн. При этом, время распространения радиоволн от РЛС до цели и обратно tд (с) связано с дальностью до цели D (м) соотношением

а, следовательно, обратным преобразованием, дальность до цели D может быть определена следующим образом:

где с - скорость света 3⋅108 м/с.
Длительность селекторного (стробирующего) импульса обычно выбирают равным длительности излучаемых РЛС импульсов (импульсной последовательности) τи, τси=τи. Исходя из этого предположения, минимальная дальность для РЛС может быть определена как:

а максимальная однозначная дальность:

тогда как разрешение по дальности Δd для многоканальной РЛС может быть определено следующим образом:

В многоканальных по дальности РЛС весь диапазон дальностей ΔD, который равен

разбивают на N каналов дальности, величина каждого из которых равна величине разрешения по дальности Δd. Таким образом, количество каналов N может быть рассчитано из следующих соотношений:

где  - скважность сигнала.
- скважность сигнала.
Весь диапазон дальностей для многоканальной по дальности РЛС можно определить как

где D0 = Dмин, а соответствующее время задержки стробирующего импульса относительно момента излучения излучаемых импульсов передающего устройства РЛС может быть определено как
 I
I
где 
образуя таким образом многоканальную по дальности систему обнаружения радиолокационных сигналов, отраженных от целей, перекрывающую весь диапазон просматриваемых дальностей.
На эпюрах фиг. 1 в качестве иллюстраций вышеизложенного показано взаимное расположение стробирующих импульсов, поступающих соответственно на стробирующий каскад первого, второго, N-го каналов по дальности показано на фиг. 1, где представлены следующие эпюры:
а) - последовательность зондирующих импульсов;
б) - стробирующий импульс первого канала по дальности с задержкой τз1;
в) - стробирующий импульс второго канала по дальности с задержкой τз2;
г) - стробирующий импульс N-го канала по дальности с задержкой τзN.
Способ и система обработки радиолокационных сигналов, известные из прототипа, построены на предположении, что дальность до цели за время наблюдения не меняется или ее изменением можно пренебречь.
Вместе с тем, расширение спектра решаемых современными РЛС задач приводит к необходимости увеличения диапазонов используемых длительностей излучаемых РЛС импульсов τи, используемых длительностей накопления импульсов Тн и необходимости наблюдения за целями с высокими радиальными скоростями Vц. Если при этом длительность излучаемых РЛС импульсов такова, что за время накопления дальность до цели, двигающейся с высокой радиальной скоростью, успевает измениться на величину разрешающей способности по дальности Δd, то в многоканальной системе это будет приводить к тому, что принимаемый сигнал в начале времени накопления будет попадать в один канал дальности, а к концу времени накопления принимаемый сигнал будет попадать уже в соседний канал дальности, вызывая тем самым энергетические потери (фиг. 2).
В частности, на эпюрах фиг. 2 представлен процесс увеличения рассогласования между стробирующим импульсом канала дальности и принимаемым импульсом, а так же огибающая последовательности принятых импульсов в рассматриваемом канале дальности с учетом рассогласования со стробирующим импульсом. На эпюре фиг. 2 приняты следующие нумерация и обозначения:
1 - стробирующий импульс;
2 - принимаемый импульс последовательности;
3 - огибающая последовательности принимаемых импульсов.
Так при длительности излучаемых РЛС импульсов в 0,2 мкс разрешение по дальности составит 30 м. Если при этом радиальная скорость цели будет 300 м/с, то за интервал времени накопления 0,1 с расстояние между РЛС и целью изменится на 30 м. Следовательно, если в момент начала накопления стробирующий импульс канала дальности и импульс принимаемой последовательности совпадали по времени, то в конце интервала накопления расхождение между принимаемым импульсом последовательности и стробирующим импульсом дойдет до 30 м. Это приведет к энергетическим потерям в канале дальности, поскольку в конце интервала накопления сигнал целиком будет присутствовать уже в соседнем канале дальности. При увеличении радиальных скоростей целей, уменьшении длительности импульса и увеличении времен накопления сигнал может разойтись по нескольким каналам дальности, что может привести к значительным энергетическим потерям и значительному ухудшению характеристик обнаружения, что неизбежно приведет к снижению дальности действия РЛС.
Если предположить, что в начальный момент времени отраженные от цели импульсы и стробирующие импульсы, определяющие канал дальности, совпадают, то при обнаружении цели, движущейся с радиальной скоростью Vц, за время накопления Тн расстояние между целью и РЛС изменится на величину:

где ΔR - расстояние между целью и РЛС.
Если ΔR=Vц*Тн много меньше разрешающей способности РЛС по дальности  то есть изменение расстояния между целью и РЛС много меньше разрешающей способности РЛС по дальности, определяемой длительностью импульса, то на интервале накопления энергия каждого из принимаемых импульсов на выходе канала дальности остается практически неизменной. Если ΔR=Vц*Тн становится соизмеримо с
то есть изменение расстояния между целью и РЛС много меньше разрешающей способности РЛС по дальности, определяемой длительностью импульса, то на интервале накопления энергия каждого из принимаемых импульсов на выходе канала дальности остается практически неизменной. Если ΔR=Vц*Тн становится соизмеримо с  то за время накопления рассогласование между стробирующим импульсом и принимаемым импульсом увеличивается, что приведет к распределению сигнала по каналам дальности и энергетическим потерям. В частности, если
то за время накопления рассогласование между стробирующим импульсом и принимаемым импульсом увеличивается, что приведет к распределению сигнала по каналам дальности и энергетическим потерям. В частности, если  то огибающая последовательности примет вид, представленный на эпюрах фиг. 2.
то огибающая последовательности примет вид, представленный на эпюрах фиг. 2.
Таким образом, если на интервале накопления рассогласование между принимаемым импульсом и стробирующим импульсом канала дальности превышает по времени длительность излучаемого импульса τи, то энергия частично попадает в соседний по дальности канал. Поскольку энергия принимаемого сигнала попадает в несколько каналов дальности, это приводит к энергетическим потерям, которые можно оценить как 10 log(L), где L - число каналов дальности, в которые попадает полезный сигнал. Если выполняется условие  то сигнал попадает в два канала дальности и, следовательно, потери составят 3 дБ.
то сигнал попадает в два канала дальности и, следовательно, потери составят 3 дБ.
Из рассмотренной выше проблемы и представленного описания прототипа, можно сделать вывод, что N параллельных каналов обработки радиолокационного сигнала по дальности, которые выполнены без учета возможного временного рассогласования между стробами дальности и принимаемыми импульсами, вызванного тем, что цель за время накопления успевает преодолеть расстояние большее, чем разрешение РЛС по дальности будет всегда приводить к энергетическим потерям и ухудшению характеристик обнаружения скоростных целей при длительном накоплении.
Таким образом, к числу недостатков раскрытых в прототипе способа и системы обработки радиолокационных сигналов можно отнести увеличение энергетических потерь и связанное с этим ухудшение характеристик обнаружения сигнала уменьшающее дальность действия РЛС при обнаружении скоростных целей при большом времени накопления.
Сущность изобретения
Проблема, решаемая заявленной группой изобретений, является устранение вышеуказанных недостатков, свойственных решению прототипа.
При этом, технический результат, достигаемый использованием заявленной группы изобретений заключается в улучшении характеристик обнаружения скоростных целей в РЛС при длительном накоплении вызванных распределением принимаемых импульсов излучаемой импульсной последовательности по каналам дальности на периоде времени накопления, взаимосвязанное со снижением энергетических потерь.
Заявленный технический результат достигается использованием способа обработки радиолокационного сигнала многоканальной по дальности радиолокационной системой (РЛС) включающий, по меньшей мере, формирование в РЛС каналов дальности путем разбиения диапазона однозначной дальности на параллельно соединенные и идентичные каналы обработки радиолокационного сигнала по дальности, каждый из которых имеет размер Δd, где Δd - разрешение по дальности, и обработку принимаемого импульса излученной РЛС импульсной последовательности в соответствии со стробирующим импульсом канала дальности на периоде времени накопления, отличающийся тем, что предварительно диапазон радиальных скоростей целей разбивают на М поддиапазонов скоростей, выбранных из условия обеспечения допустимого уровня энергетических потерь, определяют для каждого из М поддиапазонов скоростей максимальную задержку стробирующего импульса по времени, а также допустимое максимальное временное рассогласование между принимаемым импульсом излученной импульсной последовательности и стробирующим импульсом в конце периода накопления в канале дальности и формируют N параллельных каналов обработки радиолокационного сигнала по дальности в каждом из М поддиапазонов радиальных скоростей, причем в каждом из N каналов обработки радиолокационного сигнала по дальности каждого из М поддиапазонов скоростей формируют стробирующие импульсы, временное положение которых в начале периода накопления совпадает для всех поддиапазонов скоростей, а на периоде накопления корректируют независимо и в соответствии с определенным для каждого из них дополнительным расчетным временем задержки стробирующего импульса, с обеспечением компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом обработки радиолокационного сигнала по дальности, в котором осуществляют обработку принимаемого импульса.
В одном из вариантов осуществления, заявленного изобретения, на этапе формирования М поддиапазонов скоростей задают допустимый уровень приемлемых энергетических потерь μ и определяют допустимое максимальное временное рассогласование в конце периода накопления в канале дальности в зависимости от уровня приемлемых энергетических потерь и длительности излучаемых РЛС импульсов по формуле:
 где
где
Δt - допустимое максимальное временное рассогласование в конце периода накопления в канале дальности, мкс,
μ - уровень приемлемых энергетических потерь,
τи - длительности излучаемых РЛС импульсов, мкс.
При этом, число поддиапазонов скоростей М может быть определено из соотношения диапазона измеряемых РЛС скоростей цели (или - максимальной скорости цели, измеряемой РЛС) к радиальной скорости ΔV цели при допустимом максимальном временном рассогласовании в конце периода накопления в канале обработки радиолокационного сигнала по дальности, определяемой по формуле:
где с - скорость света 3⋅108 м/с,
Тн - длительность накопления импульсов, с.
В еще одном варианте осуществления, максимальную задержку стробирующего импульса по времени Δτзj для каждого из М поддиапазонов скоростей определяют по формуле:
Δτзj=j⋅Δt, j=0…М, где j=0 - соответствует случаю, когда скоростью цели можно пренебречь.
При этом, при любом из выше рассмотренных вариантов осуществления заявленного изобретения, для каждого поддиапазона скоростей может быть сформирована дополнительная изменяющаяся на периоде времени накопления задержка стробирующего импульса, определяемая по формуле:

где М - количество поддиапазонов скоростей;
k - количество импульсов на периоде накопления;
K - максимальное число импульсов на периоде накопления.
Причем, для каждого поддиапазона скоростей j=0…M каждого канала дальности i=1…N каждого периода следования импульсов k=1…K относительно излученной импульсной последовательности может быть дополнительно определена и установлена задержка τзjik для стробирующего импульса по формуле:
τзjik=Δτзjk+τзi=Δτзjk+τ0+(i-1)⋅τи,
j=0…M, i=1…N, k=1…K
Где М - количество поддиапазонов скоростей;
N - количество каналов дальности;
K - количество импульсов на периоде накопления.
Заявленный технический результат достигается также применением системы обработки радиолокационного сигнала многоканальной по дальности радиолокационной системы (РЛС), включающая, по меньшей мере, антенну РЛС и приемное устройство, выполненное с обеспечением возможности преобразования несущей частоты и усиления отраженного от цели сигнала, выход которого через АЦП соединен с параллельно соединенными и идентичными каналами обработки радиолокационного сигнала по дальности, вход которых соединен с выходом, по меньшей мере, одного, стробирующего каскада, а выход с модулем устройств дополнительной обработки сигнала, отличающаяся тем, что система содержит M×N каналов обработки радиолокационного сигнала по дальности, где N - число каналов обработки радиосигнала по дальности, сформированные в каждом из дополнительно выделенных М поддиапазонов радиальных скоростей, выбранных из условия обеспечения предустановленного допустимого уровня энергетических потерь, при этом для стробирующего каскада каждого из M×N каналов обработки принимаемого сигнала по дальности, установлено свое, отличное от других, время задержки стробирующих импульсов по времени, с обеспечением возможности осуществления стробирования входного сигнала со смещением стробирующих импульсов по времени в пределах Тн времени накопления и компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом дальности, в котором осуществляется обработка принимаемого импульса.
В одном из возможных вариантов осуществления, заявленного изобретения, допустимое максимальное временное рассогласование в конце периода накопления в канале дальности, в предпочтительном варианте осуществления, может быть определено как в зависимость от уровня приемлемых энергетических потерь и длительности излучаемых РЛС импульсов (или - импульсной последовательности?) по формуле:
 где
где
Δt - допустимое максимальное временное рассогласование в конце периода накопления в канале дальности, мкс,
μ - уровень приемлемых энергетических потерь,
τи - длительности излучаемых РЛС импульсов, мкс.
При этом, в еще одном, предпочтительном варианте осуществления, число поддиапазонов скоростей М определено из соотношения диапазона измеряемых РЛС скоростей цели (или - максимальной скорости цели, измеряемой РЛС) к радиальной скорости ΔV цели при допустимом максимальном временном рассогласовании в конце периода накопления в канале обработки радиолокационного сигнала по дальности, определяемой по формуле
где с - скорость света 3⋅108 м/с,
Тн - длительность накопления импульсов, с.
Максимальная задержка стробирующего импульса по времени Δτзj для каждого из М поддиапазонов скоростей, в другом, возможном варранте осуществления, может быть определено из прямой зависимости от допустимого максимального временного рассогласования в конце периода накопления в канале дальности Δt по формуле:
Δτзj=j⋅Δt, j=0…М, где j=0 - соответствует случаю, когда скоростью цели можно пренебречь.
При этом, в другом варианте, для каждого поддиапазона скоростей дополнительная изменяющаяся на периоде времени накопления задержка стробирующего импульса, может быть определена по формуле:

где М - количество поддиапазонов скоростей;
k - количество импульсов на периоде накопления;
K - максимальное число импульсов на периоде накопления.
Тогда, как установленная для каждого поддиапазона скоростей j=0…M каждого канала дальности i-1…N каждого периода следования импульсов k=1…K относительно излученной импульсной последовательности задержка τзjik для стробирующего импульса может быть определена по формуле:
τзjik=Δτзjk+τзi=Δτзik+τ0+(i-1)⋅τи,
j=0…M, i=1…N, k=1…K.
Где М - количество поддиапазонов скоростей;
N - количество каналов дальности;
K - количество импульсов на периоде накопления.
В соответствии с заявленным решением изобретения, модуль устройств дополнительной обработки, предпочтительно, выполнен с обеспечением возможности выполнения последующей обработки сигнала. При этом, по меньшей мере, может включать узкополосную фильтрацию с помощью набора доплеровских фильтров, и/или детектирование сигнала амплитудным детектором, и/или не когерентное накопление, и/или пороговую обработку на пороговом устройстве в каждом канале дальности. Причем, выход модуля устройств дополнительной обработки соединен со входом устройства индикации.
Краткое описание иллюстративных материалов.
Изобретение поясняется следующими иллюстративными материалами:
фиг. 1 - последовательность зондирующих и стробирующих импульсов (предшествующий уровень техники).
фиг. 2 - изменение положения стробирующих и принимаемых импульсов и изменение огибающей последовательности импульсов в рассматриваемом канале дальности (предшествующий уровень техники).
фиг. 3 - положение стробирующих импульсов каналов дальности в поддиапазонах скоростей.
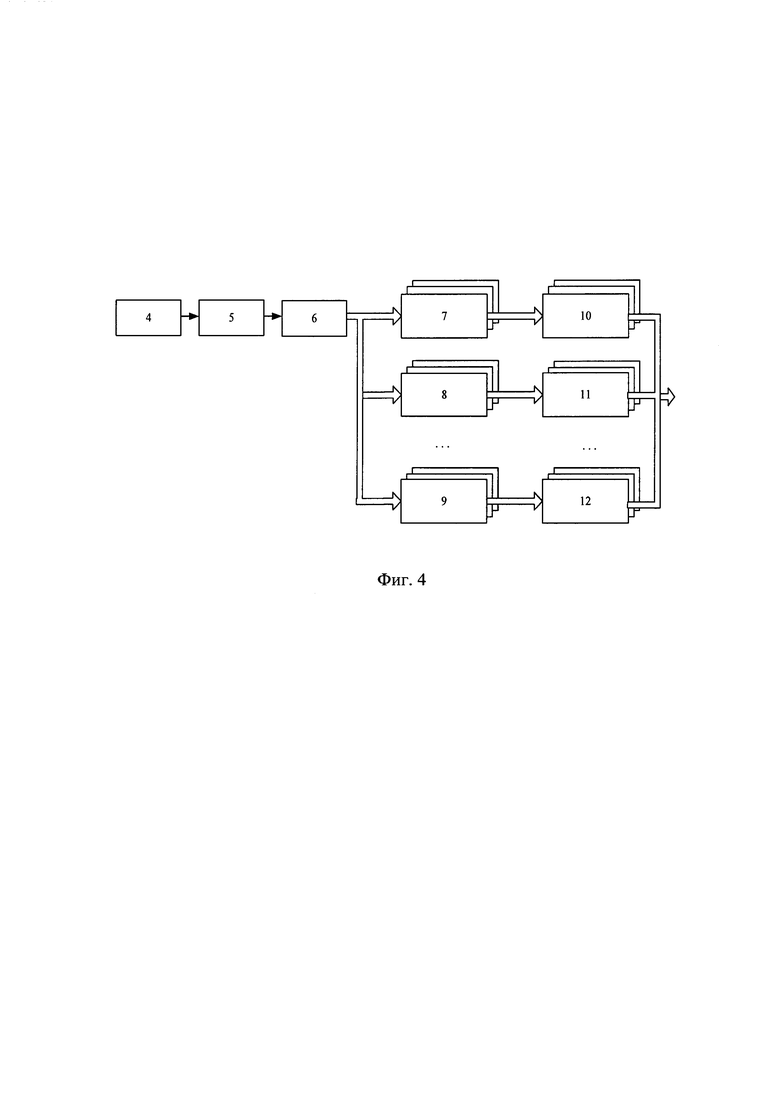
фиг. 4 - структурная схема, иллюстрирующая возможную реализацию заявленных способа и системы обработки радиолокационных сигналов для уменьшения энергетических потерь и улучшения характеристик обнаружения скоростных целей в РЛС при длительном накоплении.
При этом, на схеме фиг. 4 приняты следующие нумерация и обозначения составных элементов:
4 - Антенна РЛС;
5 - радиоприемное устройство РЛС;
6 - модуль АЦП;
7, 8, 9 - модули каналов дальности;
10, 11, 12 - модули устройств дополнительной обработки.
Следует отметить, что прилагаемые иллюстративные материалы описывают только один из наиболее предпочтительных вариантов осуществления заявленной группы изобретений и не могут рассматриваться в качестве ограничений содержания заявленного технического решения, которое включает и другие возможные варианты его осуществления.
Осуществимость заявленной группы изобретений.
Причиной выявленных недостатков известного решения прототипа является появление смещения принимаемых импульсов излучаемой импульсной последовательности на интервале времени накопления относительно стробирующих импульсов каналов дальности, что и приводит к энергетическим потерям за счет того, что энергия принимаемого сигнала за время накопления попадает в несколько каналов дальности.
Исходя из известных физических процессов, происходящих при обработке радиолокационных сигналов, раскрытых выше, в разделе описания предшествующего уровня техники, для устранения недостатков, известных аналогов, в том числе, прототипа, в заявленной группе изобретений разбивают диапазона радиальных скоростей целей на поддиапазоны исходя из допустимых энергетических потерь; определяют для каждого поддиапазона скоростей свой дополнительный сдвиг стробирующего импульса по времени для формирования каналов дальности, и формируют N параллельных каналов обработки радиолокационного сигнала по дальности в каждом поддиапазоне скоростей.
В частности, согласно рассматриваемому примеру осуществления, завяленный способ обработки радиолокационного сигнала многоканальной по дальности радиолокационной системой (РЛС) включает в себя следующие этапы:
1. задают уровень приемлемых энергетических потерь μ.
2. исходя из приемлемых энергетических потерь μ, эмпирически, определяют допустимое максимальное временное рассогласование Δt в конце периода накопления в канале дальности. Поскольку в процессе накопления временное рассогласование растет линейно (фиг. 2), то при максимальном временном рассогласовании Δt в конце периода накопления, энергия накопленного сигнала будет пропорциональна (τи - Δt/2), а энергетические потери μ составят:

соответственно максимальное временное рассогласование Δt в конце периода накопления составит:

3. Исходя из максимального временного рассогласования Δt определяют соответствующую ему радиальную скорость, которую может иметь цель с учетом времени накопления Тн:

4. Разбивают диапазон измеряемых РЛС скоростей цели Vцмакс на М поддиапазонов, следующим образом:

При этом, формула для расчета максимальной скорости для поддиапазона, очевидным образом, примет вид:

5. Для компенсации рассогласования между принимаемым и стробирующим импульсом, каждому из сформированных М поддиапазонов радиальных скоростей Vцj сопоставляют соответствующую ему максимальную дополнительную задержку Δτзj, определяемую в виде зависимости от максимального временного рассогласования Δt в конце периода накопления, следующим образом:

где j=0 - соответствует случаю, когда скоростью цели можно пренебречь.
6. Формируют параллельно для М поддиапазонов скоростей по N параллельных каналов обработки радиолокационного сигнала по дальности.
7. Устанавливают, для компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом дальности, в котором осуществляется обработка принимаемого импульса, задержку τзjik для стробирующего импульса каждого поддиапазона скоростей j=0…М каждого канала дальности i=1…N каждого периода следования импульсов k=1…K относительно зондирующего импульса, рассчитываемую по формуле,

j=0…M, i=1…N, k=1…K.
где М - количество поддиапазонов скоростей;
N - количество каналов дальности;
K - количество импульсов на периоде накопления.
8. При этом, определяют дополнительно Δτзjk - задержку, изменяющуюся на периоде времени накопления, для стробирующего импульса каждого поддиапазона скоростей, в виде зависимости от максимального временного рассогласования Δt в конце периода накопления, следующим образом:

где М - количество поддиапазонов скоростей;
K - количество импульсов на периоде накопления.
Для наглядности, на эпюрах фиг. 3а)-ж) показаны положение стробирующих импульсов каналов дальности в поддиапазонах скоростей, в соответствии с заявленным изобретением, где:
а) последовательность зондирующих импульсов;
б) стробирующие импульсы нулевого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τз01, τз02 и τз0N в начале периода накопления;
в) стробирующие импульсы нулевого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τз01, τз02 и τз0N в конце периода накопления;
г) стробирующие импульсы 1-ого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τз11, τз12 и τз1N в начале периода накопления;
д) стробирующие импульсы 1-ого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τз11, τз12 и τз1N в конце периода накопления;
е) стробирующие импульсы М-ого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τзМ1, τзМ2 и τзMN в начале периода накопления;
ж) стробирующие импульсы М-ого поддиапазона скоростей 1-ого, 2-ого и N-ого каналов по дальности с задержкой τзМ1, τзМ2 и τзМN в конце периода накопления.
Как видно из представленных на фиг. 3 эпюр, заявленный способ позволяет повысить точность обнаружения скоростных целей и способствует снижению энергетических потерь.
Заявленный способ обработки радиолокационного сигнала многоканальной по дальности радиолокационной системой (РЛС) обеспечивает снижения энергетических потерь и улучшение характеристик обнаружения скоростных целей при длительном накоплении за счет того, что весь диапазон радиальных скоростей целей разбивается на поддиапазоны ΔV в соответствии с соотношением (14) выбираемые таким образом, чтобы энергетические потери μ, вызванные рассогласованием между принимаемыми импульсами и стробирующими импульсами каналов дальности были допустимыми. Для каждого поддиапазона скоростей и для каждого канала дальности формируются свои стробирующие импульсы, со своим временем задержки от излучаемых импульсов τзjik (формула (18)). При этом, вся необходимая дальнейшая обработка реализуется в каждом канале дальности каждого поддиапазона скоростей.
Осуществление заявленного способа обработки радиолокационных сигналов для уменьшения энергетических потерь и улучшение характеристик обнаружения скоростных целей в РЛС при длительном накоплении реализуется использованием системы обработки радиолокационного сигнала многоканальной по дальности РЛС следующим образом и иллюстрируется структурной схемой фиг. 4. Согласно заявленному решению системы обработки радиолокационного сигнала многоканальной по дальности радиолокационной системы (РЛС), содержит, по меньшей мере, антенну 4 РЛС и радиоприемное (приемное) 5 устройство, выполненное с обеспечением возможности преобразования несущей частоты и усиления отраженного от цели сигнала, выход которого через АЦП 6 соединен с параллельно соединенными и идентичными каналами обработки радиолокационного сигнала по дальности 7-9, вход каждого из которых соединен с выходом стробирующего каскада канала (на схеме не фиг. 4 не показан), а выход с модулем устройств канала 10-12 дополнительной обработки сигнала, выход которых, по меньшей мере соединен с устройством индикации и/или дальнейшей обработки принятых импульсов отраженного сигнала(на схеме фиг. 4 не показаны). Для реализации заявленного способа, система обработки радиолокационного сигнала содержит M×N каналов обработки радиолокационного сигнала по дальности, где N - число каналов обработки радиосигнала по дальности, сформированные в каждом из дополнительно выделенных М поддиапазонов радиальных скоростей, выбранных из условия обеспечения предустановленного допустимого уровня энергетических потерь. При этом, для стробирующего каскада каждого из M×N каналов обработки принимаемого сигнала по дальности, установлено свое, отличное от других каналов дальности, время задержки стробирующих импульсов по времени, с обеспечением возможности осуществления стробирования входного сигнала со смещением стробирующих импульсов по времени в пределах времени накопления и компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом дальности, в котором осуществляется обработка принимаемого импульса.
Излученные и отраженные от целей сигналы принимаются антенной РЛС 4 и поступают в приемное устройство 5 для преобразования несущей частоты и последующего усиления. С выхода приемного устройства 5 отраженный от цели сигнал через АЦП 6 поступает на несколько, в общем случае M×N, параллельно соединенных и идентичных каналов дальности 7-9. На входе каждого канала дальности установлен стробирующий каскад, который осуществляет стробирование входного сигнала со смещением стробирующих импульсов по времени в пределах времени накопления Тн в соответствии со своим временем задержки τзjik (18), выделяя, таким образом, соответствующий канал дальности в соответствующем поддиапазоне скоростей. Таким образом, образуется, многоканальная по дальности, разбитая по поддиапазонам скоростей система обнаружения радиолокационных сигналов. Сигнал с выхода каждого канала дальности поступает на свой модуль устройств дополнительной обработки 10-12, которые обеспечивают выполнение последующей обработки сигнала, например: узкополосную доплеровскую фильтрацию с помощью набора доплеровских фильтров, детектирование сигнала амплитудным детектором, не когерентное накопление (интегрирование), и пороговую обработку на пороговом устройстве в каждом канале дальности. Данные с выходов модулей устройств дальнейшей обработки поступают в устройство индикации или для последующей обработки.
Для выполнения заявленного способа обработки радиолокационных сигналов РЛС может быть использована элементная база, выпускаемая в настоящее время отечественной промышленностью.
Использование заявленной группы изобретений, по сравнению с прототипом, за счет реализации согласованной обработки отраженного от цели радиолокационного сигнала при любом значении радиальной скорости цели относительно длительности излучаемых импульсов и времени накопления позволяет обеспечить снижение энергетических потерь и улучшить характеристики обнаружения.
Использованная литература
1. Основы построения РЛС РТВ. Под. Ред. Р.Ф. Бондаренко. - Киев: КВИРТУ ПВО, 1987 г. - 368 с.
2. Максимов М.В., Горгонов В.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982 г. - 304 с., ил.
3. Шишов Ю.А., Ворошилов В.А. Многоканальная радиолокация с временным разделением каналов. - М.: Радио и связь, 1987 г. - 144 с., ил.
4. Радиолокационные устройства. (Теория и принципы построения.) Под ред. В.В. Григорина-Рябова. - М.: Советское радио, 1970 г. - 680 с.
Изобретение может быть использовано в радиолокационных системах контроля и управления воздушным движением. Техническим результатом является снижение энергетических потерь и улучшение характеристик обнаружения скоростных целей при длительном времени накопления. Заявленный способ обработки радиолокационного сигнала и система для его осуществления выполняют разбиение всего диапазона радиальных скоростей на поддиапазоны, в каждом из которых проводят согласованную обработку радиолокационного сигнала по каналам дальности, с передачей сигнала каждого канала дальности для дальнейшей обработки. 2 н. и 13 з.п. ф-лы, 4 ил.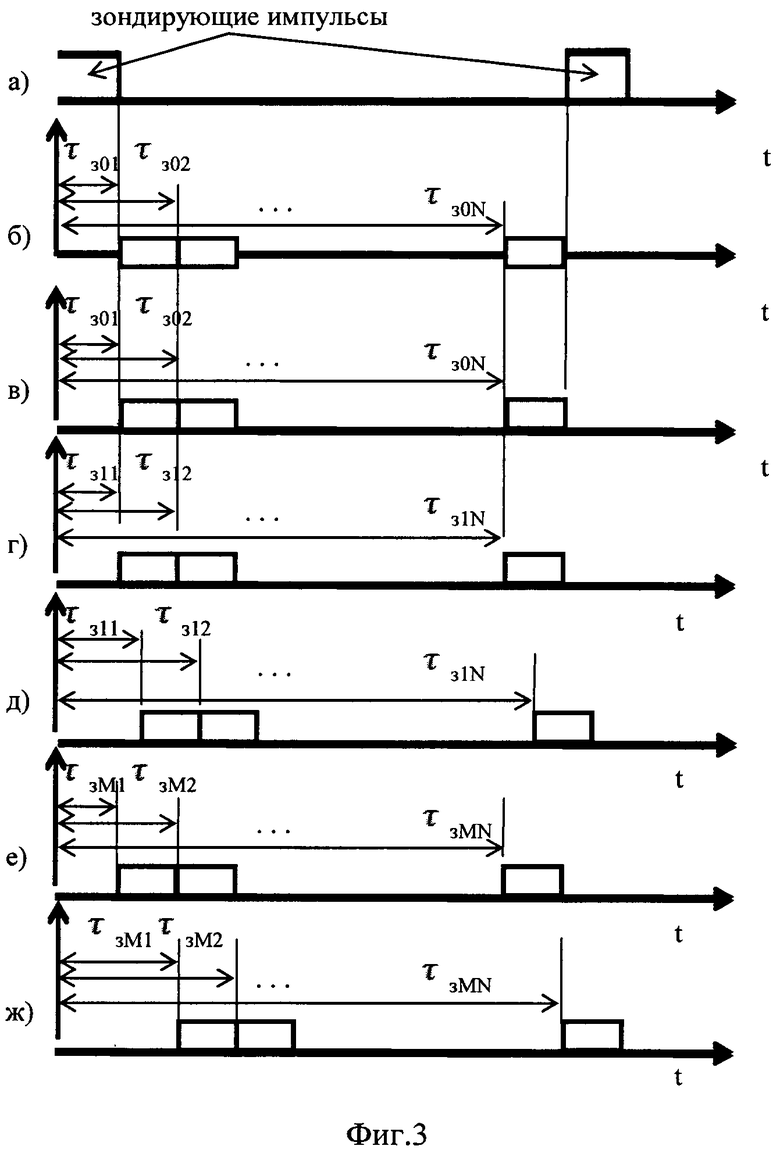
1. Способ обработки радиолокационного сигнала многоканальной по дальности радиолокационной системой (РЛС), включающий, по меньшей мере, формирование в РЛС каналов дальности путем разбиения диапазона однозначной дальности на параллельно соединенные и идентичные каналы обработки радиолокационного сигнала по дальности, каждый из которых имеет размер Δd, где Δd - разрешение по дальности, и обработку принимаемого импульса излученной РЛС импульсной последовательности в соответствии со стробирующим импульсом канала дальности на периоде времени накопления, отличающийся тем, что предварительно диапазон радиальных скоростей целей разбивают на М поддиапазонов скоростей, выбранных из условия обеспечения допустимого уровня энергетических потерь, определяют для каждого из М поддиапазонов скоростей максимальную задержку стробирующего импульса по времени, а также допустимое максимальное временное рассогласование между принимаемым импульсом излученной импульсной последовательности и стробирующим импульсом в конце периода накопления в канале дальности и формируют N параллельных каналов обработки радиолокационного сигнала по дальности в каждом из М поддиапазонов радиальных скоростей, причем в каждом из N каналов обработки радиолокационного сигнала по дальности каждого из М поддиапазонов скоростей формируют стробирующие импульсы, временное положение которых в начале периода накопления совпадает для всех поддиапазонов скоростей, а на периоде накопления корректируют независимо и в соответствии с определенным для каждого из них дополнительным расчетным временем задержки стробирующего импульса, с обеспечением компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом обработки радиолокационного сигнала по дальности, в котором осуществляют обработку принимаемого импульса.
2. Способ по п.1, отличающийся тем, что на этапе формирования М поддиапазонов скоростей задают допустимый уровень приемлемых энергетических потерь μ и определяют допустимое максимальное временное рассогласование в конце периода накопления в канале дальности в зависимости от уровня приемлемых энергетических потерь и длительности излучаемых РЛС импульсов по формуле
 где
где
Δt - допустимое максимальное временное рассогласование в конце периода накопления в канале дальности, мкс,
μ - уровень приемлемых энергетических потерь,
τи - длительности излучаемых РЛС импульсов, мкс.
3. Способ по п.2, отличающийся тем, что число поддиапазонов скоростей М определяют из соотношения диапазона измеряемых РЛС скоростей цели к радиальной скорости ΔV цели при допустимом максимальном временном рассогласовании в конце периода накопления в канале обработки радиолокационного сигнала по дальности, определяемой по формуле
где, с - скорость света 3⋅108 м/с,
Тн - длительность накопления импульсов, с.
4. Способ по п.2, отличающийся тем, что максимальную задержку стробирующего импульса по времени Δτзj для каждого из М поддиапазонов скоростей определяют по формуле
Δτзj=j⋅Δt, j=0…М, где j=0 - соответствует случаю, когда скоростью цели можно пренебречь.
5. Способ по любому из пп.1-4, отличающийся тем, что для каждого поддиапазона скоростей формируют дополнительную изменяющуюся на периоде времени накопления задержку стробирующего импульса, определяемую по формуле

где М - количество поддиапазонов скоростей;
k - количество импульсов на периоде накопления;
K - максимальное число импульсов на периоде накопления.
6. Способ по п.5, отличающийся тем, что для каждого поддиапазона скоростей j=0…M каждого канала дальности i=1…N каждого периода следования импульсов k=1…K относительно излученной импульсной последовательности дополнительно определяют и устанавливают задержку τзjik для стробирующего импульса по формуле
τзjik=Δτзjk+τзi=Δτзjk+τ0+(i-1)⋅τи,
j=0…M, i=1…N, k=1…K,
где М - количество поддиапазонов скоростей;
N - количество каналов дальности;
K - количество импульсов на периоде накопления.
7. Система обработки радиолокационного сигнала многоканальной по дальности радиолокационной системы (РЛС), включающая, по меньшей мере, антенну РЛС и приемное устройство, выполненное с обеспечением возможности преобразования несущей частоты и усиления отраженного от цели сигнала, выход которого через АЦП соединен с параллельно соединенными и идентичными каналами обработки радиолокационного сигнала по дальности, вход которых соединен с выходом, по меньшей мере, одного стробирующего каскада, а выход - с модулем устройств дополнительной обработки сигнала, отличающаяся тем, что система содержит M×N каналов обработки радиолокационного сигнала по дальности, где N - число каналов обработки радиосигнала по дальности, сформированные в каждом из дополнительно выделенных М поддиапазонов радиальных скоростей, выбранных из условия обеспечения предустановленного допустимого уровня энергетических потерь, при этом для стробирующего каскада каждого из M×N каналов обработки принимаемого сигнала по дальности, установлено свое отличное от других время задержки стробирующих импульсов по времени, с обеспечением возможности осуществления стробирования входного сигнала со смещением стробирующих импульсов по времени в пределах времени накопления Тн и компенсации рассогласования между принимаемым и стробирующим импульсом в соответствии с поддиапазоном скоростей и каналом дальности, в котором осуществляется обработка принимаемого импульса.
8. Система по п.7, отличающаяся тем, что допустимое максимальное временное рассогласование в конце периода накопления в канале дальности определено как зависимость от уровня приемлемых энергетических потерь и длительности излучаемых РЛС импульсов по формуле
 где
где
Δt - допустимое максимальное временное рассогласование в конце периода накопления в канале дальности, мкс,
μ - уровень приемлемых энергетических потерь,
τи - длительности излучаемых РЛС импульсов, мкс.
9. Система по п.8, отличающаяся тем, что число поддиапазонов скоростей М определено из соотношения диапазона измеряемых РЛС скоростей цели к радиальной скорости ΔV цели при допустимом максимальном временном рассогласовании в конце периода накопления в канале обработки радиолокационного сигнала по дальности, определяемой по формуле
где с - скорость света 3⋅108 м/с,
Тн - длительность накопления импульсов, с.
10. Система по п.7, отличающаяся тем, что максимальная задержка стробирующего импульса по времени Δτзj для каждого из М поддиапазонов скоростей определена из прямой зависимости от допустимого максимального временного рассогласования в конце периода накопления в канале дальности Δt по формуле
Δτзj=j⋅Δt, j=0…М, где j=0 - соответствует случаю, когда скоростью цели можно пренебречь.
11. Система по п.7, отличающаяся тем, что для каждого поддиапазона скоростей дополнительная изменяющаяся на периоде времени накопления задержка стробирующего импульса определена по формуле

где М - количество поддиапазонов скоростей;
k - количество импульсов на периоде накопления;
K - максимальное число импульсов на периоде накопления.
12. Система по п.11, отличающаяся тем, что установленная для каждого поддиапазона скоростей j=0…M каждого канала дальности i=1…N каждого периода следования импульсов k=1…K относительно излученной импульсной последовательности задержка τзjik для стробирующего импульса определена по формуле
τзjik=Δτзjk+τзi=Δτзjk+τ0+(i-1)⋅τи,
j=0…M, i=1…N, k=1…K,
где М - количество поддиапазонов скоростей;
N - количество каналов дальности;
K - количество импульсов на периоде накопления.
13. Система по п.7, отличающаяся тем, что модуль устройств дополнительной обработки выполнен с обеспечением возможности выполнения последующей обработки сигнала.
14. Система по п.13, отличающаяся тем, что модуль устройств дополнительной обработки, по меньшей мере, включает узкополосную фильтрацию с помощью набора доплеровских фильтров, и/или детектирование сигнала амплитудным детектором, и/или не когерентное накопление, и/или пороговую обработку на пороговом устройстве в каждом канале дальности.
15. Система по п.14, отличающаяся тем, что выход модуля устройств дополнительной обработки соединен со входом устройства индикации.
| RU 2016139847 A, 10.04.2018 | |||
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2015 |
|
RU2594005C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| Способ измерения углового положения наземных неподвижных радиоконтрастных объектов | 2017 |
|
RU2672092C1 |
| СПОСОБ СНЯТИЯ НЕОДНОЗНАЧНОСТИ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ СИСТЕМ | 2012 |
|
RU2515253C1 |
| US 2005116855 A1, 02.06.2005 | |||
| WO 9424579 A1, 27.10.1994 | |||
| CN 103616679 A, 05.03.2014. | |||

