Настоящее изобретение касается крана, имеющего по меньшей мере одну, передвигаемую вдоль первого направления туда и обратно главную балку и опертую на указанную по меньшей мере одну главную балку с возможностью передвижения вдоль второго направления крановую тележку, при этом первое направление и второе направление ориентированы ортогонально друг другу, и на крановой тележке, в частности с возможностью вращения, закреплено основание лебедки, и на этом основании лебедки подвешено передвигаемое посредством канатов в вертикальном направлении вверх и вниз грузозахватное устройство, причем это грузозахватное устройство имеет грейферные инструменты для разъемного захвата груза, в частности седельного прицепа и/или контейнера, и этот кран имеет по меньшей мере одну камеру и по меньшей мере один пульт управления для крановщика для передвижения указанной по меньшей мере одной главной балки, крановой тележки и грузозахватного устройства, а также для обслуживания грейферных инструментов грузозахватного устройства, и этот пульт управления имеет по меньшей мере один экран для воспроизведения снимаемого в каждый момент камерой изображения.
Помимо этого, изобретение касается способа эксплуатации крана.
Краны этого вида могут выполняться, например, в виде портального крана или же в виде мостового крана. В WO 2019/118992 показаны портальные краны. Эти краны применяются для погрузки грузов, таких как седельные прицепы и/или контейнеры, и управляются крановщиками посредством пульта управления. На практике известно оснащение таких кранов камерами для упрощения крановщику ориентирования грузозахватного устройства и/или грейферных инструментов при загрузке и/или выгрузке. Но часто в уровне техники по-прежнему необходим дополнительный вспомогательный персонал для инструктирования крановщика.
Задачей изобретения является предложить улучшение, которое еще лучше поддержит крановщика в оптимальном ориентировании грузозахватного устройства и/или его грейферных инструментов для приема или выгрузки груза, в частности седельных прицепов и/или контейнеров.
Для этого изобретение предлагает для кранов вышеназванного вида, чтобы на указанном по меньшей мере одном экране на воспроизведение снимаемого в каждый момент камерой изображения дополнительно могла накладываться по меньшей мере одна вспомогательная графика в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства и/или грейферного инструмента грузозахватного устройства относительно подлежащего захвату груза.
Упрощенно говоря, изобретение таким образом предусматривает, что по меньшей мере одна вспомогательная графика накладывается в качестве целенаправленной помощи на изображение камеры, чтобы так еще лучше поддерживать крановщика в ориентировании грузозахватного устройства и/или грейферного инструмента грузозахватного устройства. Благодаря этому в выгодных вариантах осуществления изобретения можно даже обходиться без вспомогательного персонала для инструктирования (направления) крановщика.
Предлагаемый изобретением способ эксплуатации предлагаемого изобретением крана соответственно предусматривает, что на экране на воспроизведение снимаемого в каждый момент камерой изображения дополнительно накладывается по меньшей мере одна вспомогательная графика в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства и/или грейферного инструмента грузозахватного устройства относительно подлежащего захвату груза, предпочтительно подлежащего захвату седельного прицепа и/или контейнера.
Из названных ниже признаков предпочтительных вариантов предлагаемых изобретением кранов следуют соответственно также предпочтительные варианты осуществления предлагаемого изобретением способа.
Камеры в этом изобретении, как правило, снимают временную последовательность изображений. В зависимости от скорости съемки и воспроизведения эта последовательность изображений представляется крановщику еще в виде последовательности отдельных различимых изображений или в виде фильма.
Изобретение может применяться для погрузки разных грузов, в частности, как контейнеров, так и седельных прицепов. Контейнеры представляют собой вообще емкости, которые, например, могут транспортироваться на собственно известных низкорамных прицепах посредством грузовиков, тягача, терминальных тракторов и тому подобного или на железнодорожных прицепах, а также на судах. Предпочтительно эти контейнеры представляют собой так называемые ISO-контейнеры или морские контейнеры. Седельные прицепы, в отличие от этого, имеют собственные колеса, так что они могут навешиваться прямо на грузовик. Но предлагаемые изобретением краны могут применяться также именно для погрузки таких седельных прицепов на суда и/или железнодорожные прицепы (вагоны).
Грузозахватные устройства часто называются также спредерами. Они могут также в этом изобретении иметь разные виды грейферных инструментов для захвата груза, в частности седельных прицепов и/или контейнеров. Например, грузозахватное устройство может в качестве грузозахватных инструментов иметь опертые с возможностью поворота лапы клещей для захвата седельного прицепа. В таком случае по меньшей мере на одной из лап клещей может быть расположена указанная по меньшей мере одна камера, также смотрящая горизонтально в сторону. Особенно предпочтительно в этой связи предусмотрено, что эта камера расположена в нижней концевой области лапы клещей (клещевой захват) в области ножки клещей этой лапы клещей. Но дополнительно и/или вместо этого грузозахватные устройства предлагаемых изобретением кранов могут также иметь в качестве грейферных инструментов блокировочные цапфы, которые также называются поворотным замком, чтобы вставляться ими в соответствующие угловые фурнитуры, которые также называются угловыми фитингами, контейнеров. Чтобы можно было адаптировать положение блокировочных штифтов друг относительно друга к типам контейнеров различной длины, грузозахватное устройство может быть выполнено телескопическим. Оно может иметь, например, грейферные балки, на которых находятся блокировочные цапфы, причем эти грейферные балки могут посредством телескопов вдвигаться в грузозахватное устройство и выдвигаться из него для транспортировки контейнеров разной длины. В предпочтительных вариантах осуществления, в которых камеры находятся на грузозахватном устройстве, эти камеры могут быть также расположены на грейферных балках, в частности вблизи блокировочных цапф.
Указанная по меньшей мере одна камера в предпочтительных вариантах может быть установлена на основании лебедки или на грузозахватном устройстве и быть ориентирована, смотря вертикально вниз. Если камера находится или камеры находятся на грузозахватном устройстве, то ориентирование крана, соответственно, грузозахватного устройства относительно подлежащего захватыванию груза, предпочтительно подлежащего захватыванию седельного прицепа и/или контейнера, осуществляется удобным образом в рабочем состоянии, в котором грузозахватное устройство находится на заранее назначаемой исходной высоте, например, на максимально возможной высоте.
В предпочтительных вариантах осуществления основание лебедки опирается, соответственно, навешено с возможностью вращения на крановую тележку. Термин основание лебедки должен пониматься обобщенно. Это область крана, которая закреплена на крановой тележке и на которой могут наматываться и/или разматываться и/или перенаправляться канаты, на которых висит грузозахватное устройство. Основание лебедки может иметь подобную строению, закрытую снаружи структуру и называться лебедочным помещением (лебедочная кабина). Но основание лебедки может быть выполнено также в виде целиком или частично открытой структуры и в этом случае не подобно строению.
Пульт управления может быть фиксированным образом соединен с основанием лебедки и расположен на кране в повышенной позиции. Но в рамках изобретения возможны, например, также мобильные пульты управления, которые крановщик может тогда, например, также носить с собой. Но пульт управления может также представлять собой расположенный в каком-либо здании удаленно от крана пульт дистанционного управления. В каждом случае в пульт управления интегрирован указанный по меньшей мере один экран, который воспроизводит снимаемые в данный момент указанной по меньшей мере одной камерой изображения, причем именно на эти изображения в соответствии с изобретением накладывается указанная по меньшей мере одна вспомогательная графика.
Указанная вспомогательная графика может представлять собой, например, по меньшей мере одну вспомогательную линию для ориентирования по грейферной кромке подлежащего захвату груза, в частности подлежащего захвату седельного прицепа и/или контейнера. Но вспомогательная графика может, например, также включать в себя по меньшей мере две ориентированные ортогонально друг другу вспомогательные линии для ориентирования по углу подлежащего захвату груза, в частности подлежащего захвату седельного прицепа и/или контейнера. Но возможна, например, также u-образная форма вспомогательных график.
Говоря обобщенно, форма вспомогательной графики удобным образом адаптирована или может гибко адаптироваться к форме подлежащего захватыванию груза. Положение, ориентация и, при необходимости, также размер и форма вспомогательной графики может быть выполнена с возможностью калибрования. Так, может быть предусмотрено, чтобы вспомогательная графика сначала калибровалась на основании калибровочных элементов, таких как, например, определенный тип контейнера или седельного прицепа или другого типа груза или положения и формы специальных маркировок на грузе, чтобы затем после этого быть адаптированной специально к этому типу груза, в частности седельному прицепу и/или контейнеру, и/или маркировке.
Можно также накладывать вспомогательные графики не постоянно, а только временно, в частности только тогда, когда они также действительно нужны. Может быть, например, предусмотрена возможность наложения и/или скрытия вспомогательной графики (вспомогательных график) в зависимости от ситуации и/или динамически, например, крановщиком и/или автоматизированным образом управлением крана. С тем же успехом можно закладывать несколько разных вспомогательных график для разных типов груза так, чтобы крановщик мог выбирать и накладывать именно ту вспомогательную графику (те вспомогательные графики), которая ему нужна для определенного типа груза. Также возможно анимированное, например, управлением крана, то есть движущееся исполнение вспомогательных график.
Дополнительно к вспомогательным графикам в предпочтительных вариантах осуществления изобретения на указанном по меньшей мере одном экране могут также отображаться информация и/или показания других систем ассистирования. Так, например, можно одновременно накладывать информацию о высоте, мгновенные скорости, информацию о положении и/или информацию о расстоянии, например, от грунта, разных составных частей предлагаемого изобретением крана, таких как, например, весь кран и/или крановая тележка и/или основание лебедки и/или грузозахватное устройство и/или грейферные инструменты и/или же груз и тому подобное. И здесь возможны анимированные, то есть движущиеся изображения. Так, например, лапы клещей и/или другие грейферные инструменты могут изображаться движущимися друг к другу и друг от друга.
Одна из технологий, собственно уже известных в уровне техники в виде так называемого микродвижения, может также реализовываться у предлагаемых изобретением кранов. При этом речь идет о точном (прецизионном) позиционировании грузозахватного устройства в горизонтальном и вертикальном направлении, а также касается ориентации груза путем наклона и/или поворота груза.
Число и позиционирование камер на кране может варьироваться. Особенно предпочтительные варианты изобретения предусматривают, что на основании лебедки или на грузозахватном устройстве дистанцированно друг от друга установлены четыре ориентированные, смотря вертикально вниз, камеры, и снимаемые в каждый момент изображения этих четырех камер могут воспроизводиться в четырех отдельных секторах рядом друг с другом на экране вместе с каждой по меньшей мере одной наложенной вспомогательной графикой.
Обобщенно говоря, речь может идти также о том, чтобы на основании лебедки или на грузозахватном устройстве были дистанцированно друг от друга установлены несколько ориентированных, смотря вертикально вниз, камер, и при этом предпочтительно снимаемые в каждый момент изображения этих камер могли воспроизводиться в нескольких отдельных секторах рядом друг с другом на экране вместе с каждой по меньшей мере одной наложенной вспомогательной графикой. Камеры могут быть расположены, например, в угловых областях основания лебедки и/или грузозахватного устройства.
В соответствии с изобретением краны могут иметь одну, а также несколько движущихся вдоль первого направления туда и обратно главных балок. У одного особенно предпочтительного предлагаемого изобретением крана предусмотрено, что он имеет две движущиеся вдоль первого направления туда и обратно главные балки, на которые с возможностью движения туда и обратно вдоль второго направления опирается крановая тележка.
В особенно предпочтительных вариантах осуществления изобретения предусмотрено, что кран представляет собой портальный кран, имеющий передвигающиеся на колесах вертикальные опоры, при этом указанная или указанные главные балки опираются на эти вертикальные опоры и вместе с вертикальными опорами может, соответственно, могут двигаться на колесах туда и обратно вдоль первого направления. Другой предлагаемый изобретением вариант предусматривает, что кран представляет собой мостовой кран, при этом указанная или указанные главные балки посредством колес может, соответственно, могут двигаться туда и обратно вдоль первого направления по направляющим рельсам.
Другие признаки и подробности предпочтительных вариантов осуществления изобретения наглядно поясняются ниже на примерах осуществления. Показано:
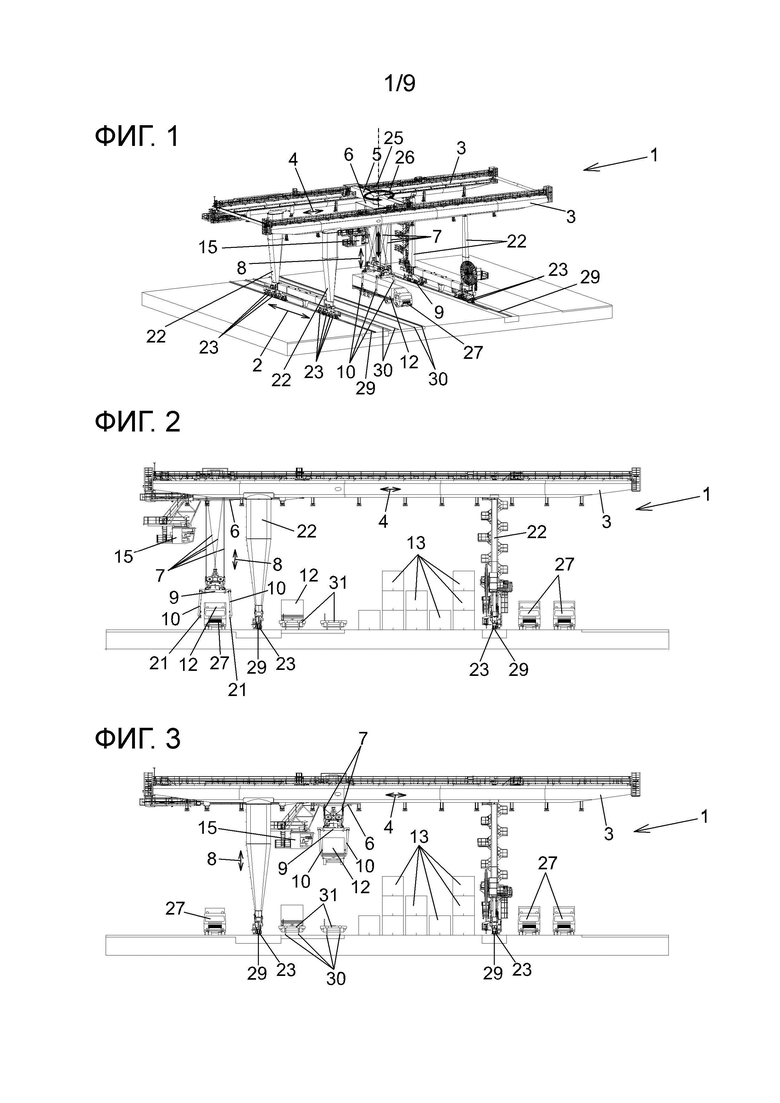
фиг.1-3: разные виды предлагаемого изобретением крана, который выполнен как портальный кран;
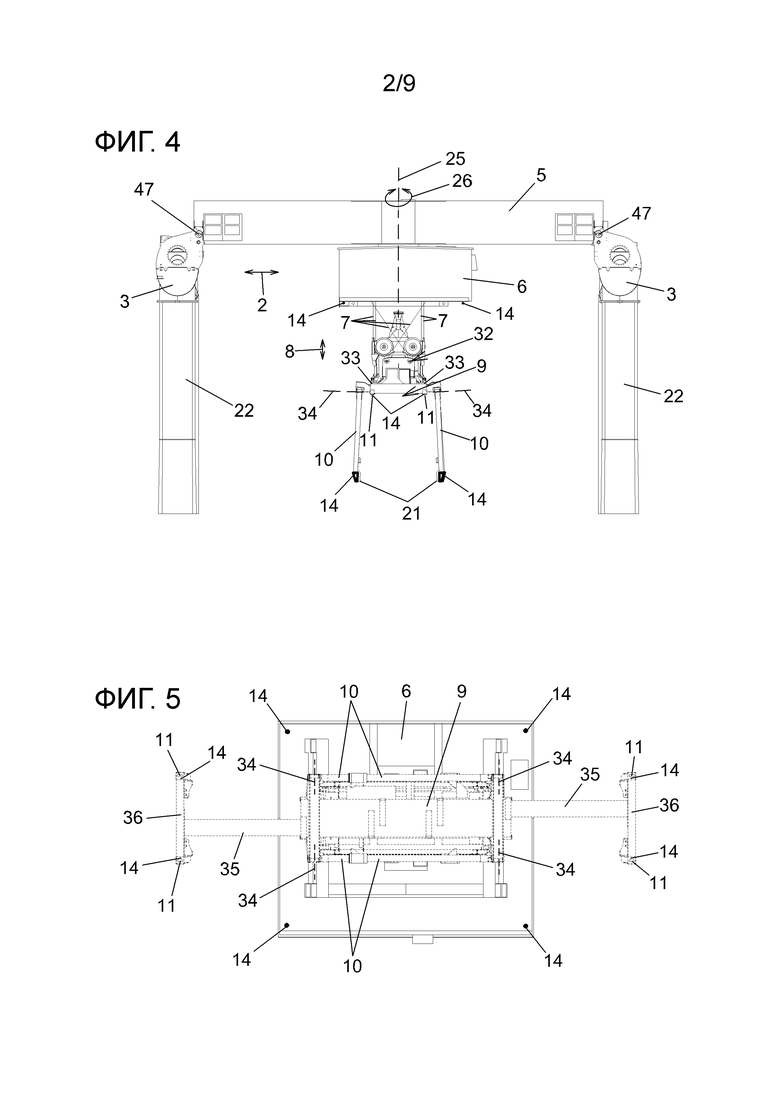
фиг.4: схематичное изображение расположения главных балок, крановой тележки, основания лебедки и грузозахватного устройства крана, изображенного на фиг.1-3;
фиг.5: схематизированный вид снизу основания лебедки и грузозахватного устройства крана с фиг.1-3;
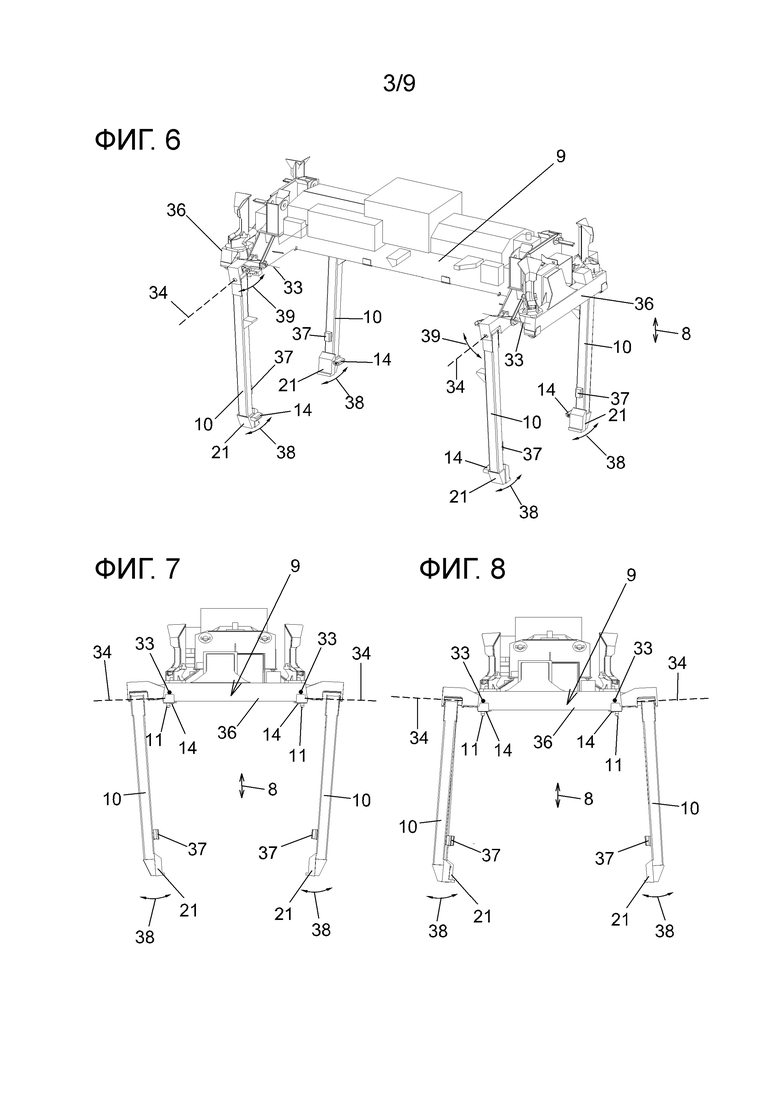
фиг.6-8: изображения применяющегося у этого крана грузозахватного устройства;
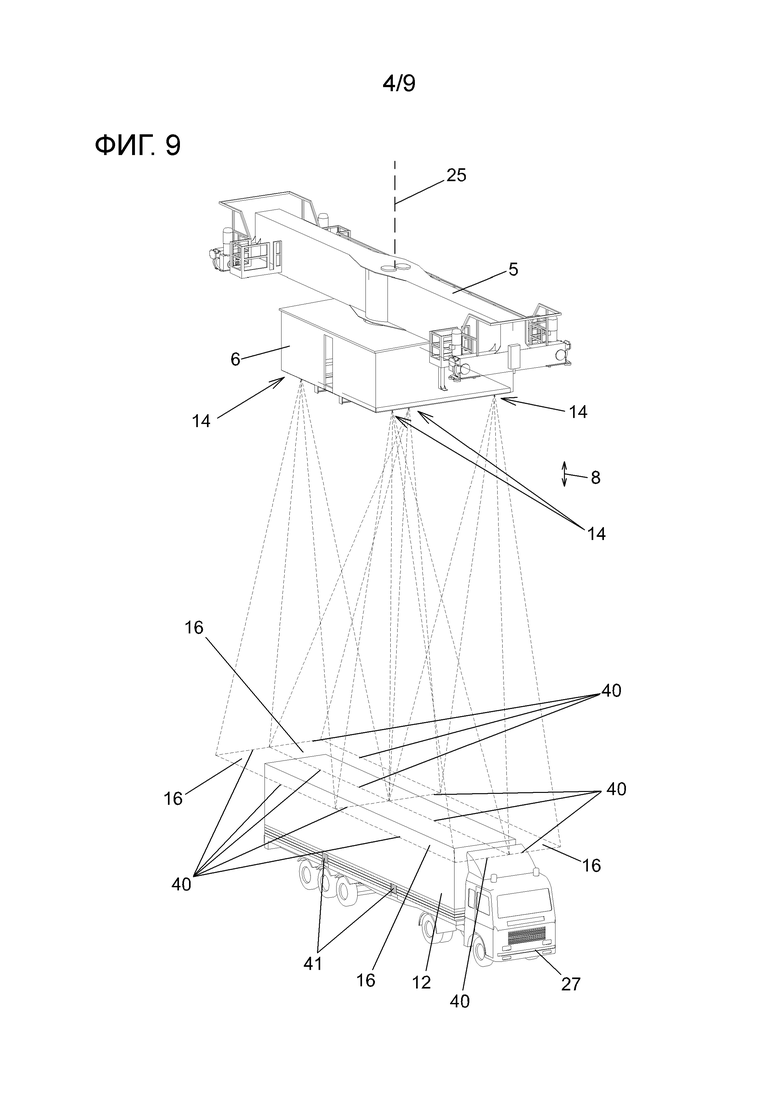
фиг.9: схематичное представление, как с помощью четырех расположенных на основании лебедки этого крана камер могут сниматься изображения в четырех отельных, расположенных рядом друг с другом секторах;
фиг.10-30: разные ситуации погрузки, в которых применяется наложение вспомогательных график на снятые изображения в соответствии с изобретением;
фиг.31: изображение применения выполненных в виде лап клещей грейферных инструментов вместе с расположенными там камерами;
фиг.32 и 33: два изображения, соответствующих разным ситуациям в соответствии с фиг.31, и
фиг.34: предлагаемый изобретением кран, который выполнен в виде мостового крана.
На фиг.1 показан вид в перспективе наискосок сверху предлагаемого изобретением крана 1, выполненного в этом примере осуществления в виде портального крана. Наряду с некоторыми, не существенными для изобретения, собственно известными деталями, которые здесь подробно не поясняются, этот кран 1 имеет, прежде всего, две главные балки 3. Эти главные балки 3 опираются на вертикальные опоры 22. На нижних концах вертикальных опор 22 находятся, как собственно известно, колесные пары, имеющие несколько колес 23. Посредством этих колес 23 главные балки 3 опираются с возможностью движения туда и обратно в первом направлении 2. В показанном примере осуществления речь идет о системе с рельсовой опорой, у которой колеса 23 опираются с возможностью движения на крановые рельсы 29. Но с тем же успехом возможно, чтобы колеса 23 имели, например, соответствующие шины на пневматической или резиновой опоре, которыми они могут просто ехать по соответственно ровному грунту.
На обе главные балки 3 с возможностью движения туда и обратно вдоль второго направления 4 опирается крановая тележка 5. Первое направление 2 и второе направление 4 ориентированы ортогонально друг другу. На крановую тележку 5, как собственно известно, опирается выполненное в этом примере в виде лебедочного помещения основание 6 лебедки, в этом примере осуществления с возможностью вращения. Это основание 6 лебедки может вращаться вокруг оси 25 вращения в противоположных друг другу направлениях 26 вращения относительно крановой тележки 5. На основании 6 лебедки посредством канатов 7 собственно известным образом висит грузозахватное устройство 9. Путем соответствующего наматывания и разматывания этих канатов 7 на не изображенных здесь явно канатных барабанах грузозахватное устройство 9 может передвигаться вверх и вниз в вертикальном направлении 8. Грузозахватное устройство 9 имеет разные грейферные инструменты 10 и 11 для разъемного захвата седельного прицепа 12 и/или контейнера 13, которые позднее еще будут поясняться в деталях. Кроме того, предлагаемый изобретением кран 1 включает в себя также несколько камер 14, расположение и функционирование которых тоже еще будет поясняться в деталях позднее. В этом примере осуществления пульт 15 управления крана фиксированным образом соединен с основанием 6 лебедки. Пульт 15 управления включает в себя все те вспомогательные средства, которые нужны крановщику для передвижения указанной по меньшей мере одной главной балки 3, крановой тележки 5 и грузозахватного устройства 9, а также для обслуживания грейферных инструментов 10 и 11 грузозахватного устройства 9. В том числе, пульт 15 управления включает в себя также по меньшей мере один экран 17 для воспроизведения снимаемого в каждый момент каждой камерой 14 или камерами изображения 16.
Как уже пояснялось, пульт 15 управления, конечно, не обязательно должен быть реализован с фиксацией на основании лебедки 6, как выполнено в этом примере осуществления. Напротив, речь может идти также о мобильном, в частности также о мобильно носимом крановщиком пульте 15 управления, что сегодня также собственно известно в управлении кранами. Помимо этого, пульт управления, как уже указывалось, может представлять собой, например, также расположенный в каком-либо здании удаленно от крана 1 пульт дистанционного управления.
На фиг.1 также изображен грузовик 27, имеющий седельный прицеп 12, именно который на фиг.1 хватают выполненные в виде лап клещей грейферные инструменты 10 грузозахватного устройства 9. Наряду с грузовиком 27 в области между крановыми рельсами 29 в примере осуществления в соответствии с фиг.1 предусмотрены также железнодорожные рельсы 30, по которым могут предоставляться соответствующие железнодорожные прицепы 31 для погрузки седельных прицепов 12 и контейнеров 13 или же других грузов.
На фиг.2 и 3 этот кран 1 с фиг.1 изображен в каждом случае на виде сбоку. На фиг.2 и 3 в области между крановыми рельсами 29 штабелированы различные контейнеры 13. На железнодорожных рельсах 30 находятся железнодорожные прицепы 31, причем на одном из этих прицепов 31 как раз находится седельный прицеп 12, в то время как другой железнодорожный прицеп 31 еще свободен. На фиг.2 изображена ситуация, в которой грейферные инструменты 10 в виде лап клещей грузозахватного устройства 9 развернуты так, что грузозахватное устройство 9 может продолжать опускаться в вертикальном направлении 8. После этого грейферные инструменты в виде лап 10 клещей поворачиваются друг к другу, так что ножки 21 клещей захватывают седельный прицеп 12. На фиг.3 показано, как седельный прицеп 12 уже поднят посредством грузозахватного устройства 9 и размещается над еще пустым железнодорожным прицепом 31.
На фиг.4 теперь показан схематичный вид, на котором второе направление 4 располагается нормально к плоскости чертежа. Изображены две главные балки 3 крана 1 и их ходовые рельсы 47, с возможностью движения на которых туда и обратно вдоль второго направления 4 опирается крановая тележка 5. На крановой тележке 5 установлено основание 6 лебедки, и причем в этом примере осуществления так, что оно может вращаться вокруг вертикальной оси 25 вращения в направлениях 26 вращения относительно крановой тележки 5. На основании 6 лебедки висит собственно известным образом посредством канатов 7 грузозахватное устройство 9. Конкретно здесь предусмотрено, что на грузозахватном устройстве 9 находится блочная рама 32, которая реализует соединение между канатами 7 и грузозахватным устройством 9. Такие блочные рамы 32, как и самые разные другие виды канатных подвесок для грузозахватного устройства 9, собственно известны и здесь не нуждаются в пояснениях. Конечно, можно также обойтись без блочной рамы 32, например, предусмотрев, чтобы канаты 7 посредством анкерных точек или канатных роликов или тому подобного были закреплены прямо на грузозахватном устройстве 9.
Чтобы можно было захватывать как седельные прицепы 12, так и контейнеры 13, грузозахватное устройство 9 этого примера осуществления имеет разные грейферные инструменты 10, 11. Это, во-первых, выполненные в виде лап клещей грейферные инструменты 10 для захватывания седельного прицепа 12, а во-вторых, выполненные в виде блокировочных цапф, соответственно, в виде поворотного замка грейферные инструменты 11 для захватывания контейнера 13. Такие лапы клещей и блокировочные цапфы тоже, собственно, известны и не нуждаются в подробных пояснениях. На фиг.4 указаны также первые оси 33 поворота и вторые оси 34 поворота. Вокруг первых осей 33 поворота могут собственно известным образом поворачиваться друг к другу и друг от друга выполненные в виде лап клещей грейферные инструменты 10, чтобы так можно было захватывать, а также отпускать седельный прицеп 12. Вокруг вторых осей 34 поворота грейферные инструменты 10 в виде лап клещей поворачиваются тогда, когда они не нужны. Например, в ситуациях, в которых контейнер 13 должен захватываться посредством грейферных инструментов 11. Также поворот лап клещей, соответственно, грейферных инструментов 10 вокруг вторых осей 34 собственно известен и не нуждается в дальнейших пояснениях.
Хотя изобретение может реализовываться при минимальном количестве только одной камеры 14, в этом варианте осуществления предусмотрено множество камер 14. Так, на нижней стороне основания 6 лебедки находятся четыре смотрящие вертикально вниз, дистанцированные друг от друга камеры 14. Предпочтительно эти четыре камеры 14 установлены каждая в одном из углов основания 6 лебедки. Дополнительно также грузозахватное устройство 9 в этом примере осуществления имеет четыре другие камеры 14. Каждая из этих камер 14 находится в непосредственной близости от одного из выполненных в виде блокировочных цапф грейферных инструментов 11 на вдвигаемых и выдвигаемых здесь посредством телескопов 35 грейферных балках 36 грузозахватного устройства 9. Но дополнительно в этом примере осуществления также на выполненных в виде лап клещей грейферных инструментах 10 вблизи ножек 21 клещей расположено еще по одной камере 14, которая смотрит в горизонтальном направлении в сторону.
На фиг.5 показан вид снизу основания 6 лебедки и расположенного под ним грузозахватного устройства 9. Хорошо видно здесь положение как камер 14 на основании 6 лебедки, так и камер 14 на грузозахватном устройстве 9, соответственно, его грейферной балке 36. Телескопы 35 изображены здесь схематизированным образом, но собственно известны в уровне техники. Они позволяют вдвигать и выдвигать грейферные балки 36 вместе с расположенными на них грейферными инструментами 11 в виде блокировочных цапф, чтобы так адаптировать длину грузозахватного устройства 9 к длине каждого подлежащего захватыванию контейнера 13. На фиг.5 изображены грейферные инструменты 10 в виде лап клещей, повернутые вокруг вторых осей 34 поворота вверх. Таким образом, на фиг.5 они находятся в своем неактивном положении, которое применяется для того, чтобы грузить контейнеры 13 посредством грузозахватного устройства 9.
На фиг.6 показано грузозахватное устройство 9 на изображении в перспективе, при этом грейферные инструменты 10 в виде лап клещей повернуты в их активное положение вниз, в котором они могут захватывать седельные прицепы 12. Поворот лап клещей, соответственно, грейферных инструментов 10 друг к другу и друг от друга вокруг первой оси 33 поворота осуществляется в первых направлениях 38 поворота, чтобы захватывать или отпускать седельный прицеп 12. Поворот во вторых направлениях 39 поворота вокруг вторых осей 34 поворота осуществляется, чтобы можно было поворачивать грейферные инструменты 10 в виде лап клещей туда и обратно между их изображенным на фиг.6 активным положением и их изображенным на фиг.5 неактивным положением. Хорошо различимо на фиг.6 также положение установленных вблизи ножек 21 клещей на грейферных инструментах 10 камер 14, принцип действия которых еще будет поясняться позднее. Изображены также дополнительные камеры 37, которые могут быть в наличии, но, как правило, не применяются для реализации изобретения. Ножки 21 клещей удобным образом, как и изображено, выполнены в виде крючков, чтобы они собственно известным образом могли подхватывать соответствующие грейферные кромки 19 седельных прицепов 12. Конечно, возможны и другие крепления грейферных инструментов, соответственно, лап 10 клещей на седельных прицепах 12. То же самое относится к грейферным инструментам 11 для захвата контейнеров 13. То есть и здесь не обязательно речь должна идти о блокировочных цапфах. И другие грейферные инструменты 11 могут применяться для захватывания соответствующих контейнеров 13.
На фиг.7 грейферные инструменты 10 в виде лап клещей изображены, во всяком случае, будучи повернуты вокруг первой оси 33 поворота друг к другу, а на фиг.8 отвернуты друг от друга.
На фиг.9 теперь к первому примеру осуществления предлагаемого изобретением крана 1 показана крановая тележка 5 и расположенное на ней основание 6 лебедки вместе с его четырьмя ориентированными, смотря вертикально вниз, камерами 14. Другие конструктивные элементы крана 1 и, в частности, грузозахватное устройство 9, на фиг.9 не изображены. Грузозахватное устройство 9 при излагаемом ниже ориентировании в каждом случае на практике удобным образом передвигается вертикально вверх настолько, чтобы оно не мешало изображенным на фиг.9 посредством штриховых линий углам обзора отдельных камер 14 на основании 6 лебедки.
В изображенной на фиг.9 ситуации четыре ориентированные, смотря вертикально вниз, камеры 14 на основании 6 лебедки снимают каждая изображения 16 в отдельных друг от друга секторах, которые потом, как поясняется ниже, могут изображаться вместе рядом друг с другом на одном экране 17. На фиг.9 наглядно показано, как посредством четырех камер 14 сверху могут сниматься изображения расположенного под ними грузовика 27 вместе с седельным прицепом 12 в отдельных друг от друга, но расположенных рядом друг с другом секторах. Отдельные изображения 16 в представленной плоскости съемки ограничены каждое границами 40 изображения.
Хотя это здесь не изображено, аналогичным образом также соответствующие четыре изображения седельного прицепа 12 и грузовика 27 могли бы сниматься посредством расположенных на грузозахватном устройстве 9 камер 14. Для этого грузозахватное устройство 9 удобным образом передвигается в задаваемое исходное положение, особенно предпочтительно именно на максимальную высоту под основание 6 лебедки, чтобы крановщик потом мог ориентировать грузозахватное устройство 9 и/или грейферный инструмент 10, соответственно, 11 грузозахватного устройства 9, например, относительно подлежащего захватыванию седельного прицепа 12 и аналогичным образом, например, также и относительно подлежащего захватыванию контейнера 13.
Ниже теперь излагается, как в разных ситуациях крановщик в соответствии с изобретением с помощью наложенных на изображения 16 вспомогательных график 18 может ориентировать грузозахватное устройство 9 и/или грейферный инструмент 10, соответственно, 11 грузозахватного устройства 9 относительно подлежащего захватыванию седельного прицепа 12 и/или контейнера 13.
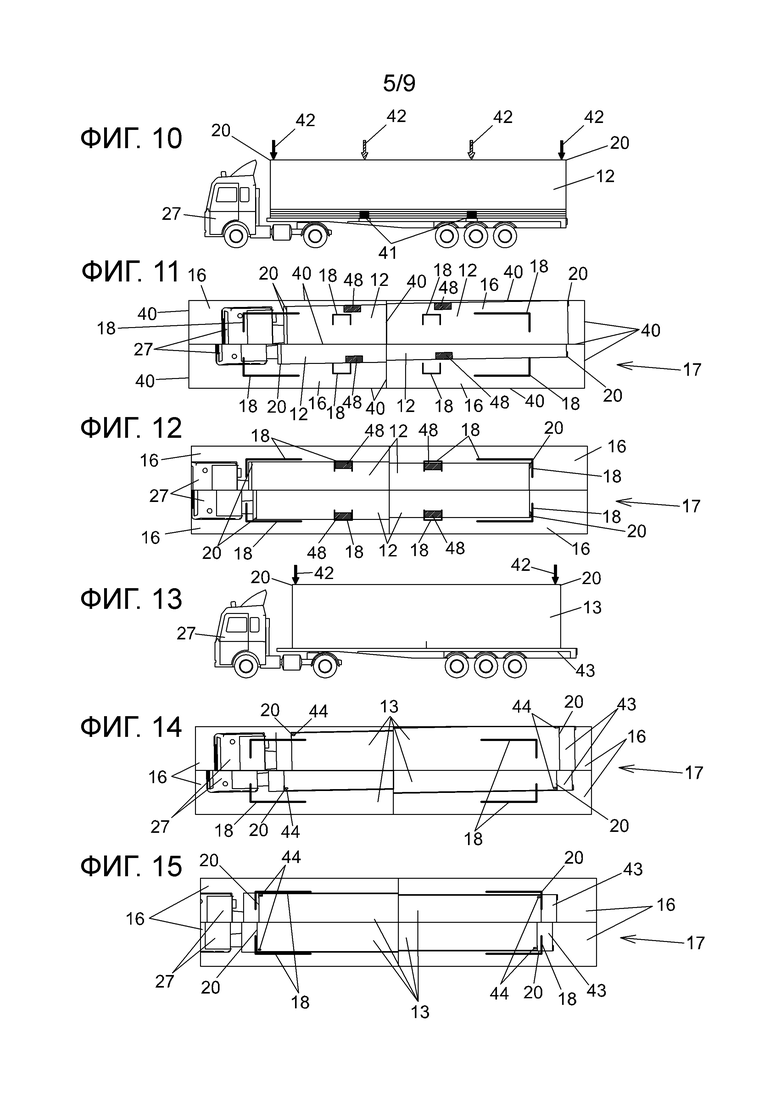
На фиг.10 показан в этой связи сначала вид сбоку транспортируемого посредством грузовика 27 седельного прицепа 12, который для погрузки этого седельного прицепа 12 может устанавливаться в области, в которой кран 1 посредством грузозахватного устройства 9 может захватывать и соответственно грузить седельный прицеп 12. Сбоку на седельном прицепе 12 находятся цветные панели 41, на функции которых еще подробно остановимся позднее в связи с фиг.31-33.
Сначала для крановщика существует задача при предпочтительно полностью сдвинутых вверх грузозахватных устройствах 9 разместить грузозахватное устройство 9 над подлежащим погрузке седельным прицепом 12 так, чтобы грузозахватное устройство 9 после этого своими грейферными инструментами 10 в виде лап клещей могло спускаться на седельный прицеп 12 так, чтобы седельный прицеп 12 был оптимально ориентирован между грейферными инструментами 10 в виде лап клещей для захватывания седельного прицепа 12.
На фиг.11 теперь схематизированным образом показано представление экрана 17 пульта 15 управления, на котором в этом примере осуществления, как показано на фиг.9, могут отображаться рядом друг с другом четыре мгновенно снятых изображения 16 четырех камер 14 на основании 6 лебедки. На каждом из изображений 16 в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства 9 и/или грейферного инструмента 10, соответственно, 11 грузозахватного устройства 9 наложена по меньшей мере одна вспомогательная графика 18. В этом примере соответствующие вспомогательные графики 18 представляют собой каждая, прежде всего, две ориентированные ортогонально друг другу вспомогательные линии, которые служат для ориентирования каждая по одному углу 20 седельного прицепа 12. Каждое из представляемых на экране 17 изображений 16 ограничено своими границами 40 изображения. На фиг.10 стрелки 42 вблизи углов 20 показывают плоскость на верхней кромке седельного прицепа 12, которая рассматривается крановщиком при изложенном ниже процессе ориентирования. Это плоскость, в которой лежат верхние углы 20 седельного прицепа 12. На фиг.11 теперь показана исходная ситуация, в которой основание 6 лебедки и вместе с тем еще оттянутое вверх грузозахватное устройство 9 еще не ориентированы надлежащим образом над седельным прицепом 12, чтобы можно было двигать грузозахватное устройство 9 вниз на седельный прицеп 12 так, чтобы последний мог захватываться посредством грейферных инструментов 10 в виде лап клещей.
На фиг.11, а также на последующих фигурах показано в качестве примера также, что четыре представленных на экране 17 изображений 16 не обязательно должны быть оптимально ориентированы друг относительно друга так, чтобы они показывали представленные на каждом из них части седельного прицепа 12, соответственно, грузовика 27 без сдвига. Изображенный на фиг.11 в качестве примера сдвиг не мешает изложенному ниже передвижению при ориентировании.
При рассмотрении изображенного на фиг.11 экрана 17 крановщик в каждом случае простым образом различает, что наружные очертания седельного прицепа 12 и, в частности, его углов 20 еще не совпадают надлежащим образом с присвоенными углам 20 вспомогательными графиками. Крановщик может простым образом узнать из фиг.11, что грузозахватное устройство 9 сначала еще должно быть ориентировано относительно седельного прицепа 12, прежде чем грузозахватное устройство 9 для захватывания седельного прицепа 12 может двигаться вниз на него. Для ориентирования крановщик может передвигать кран 1 вдоль первого направления 2 и крановую тележку 5 вдоль второго направления 4 так, чтобы наружные контуры и, в частности, углы 20 седельного прицепа 12 достаточным образом совпадали с наложенными на изображения 16 вспомогательными графиками 18. В зависимости от случая, при этом может также вращаться основание 6 лебедки вокруг оси 25 вращения в одном из направлений 26 вращения относительно крановой тележки 5, если это необходимо для оптимальной ориентации. При ориентировании грузозахватного устройства 9, как изображено на фиг.12, не обязательно должно достигаться идеальное совпадение. Достаточно, если видимые на изображениях 16 наружные контуры, в частности углы 20, седельного прицепа 12 оказывались как можно более симметричными относительно вспомогательных график 18. Когда состояние, которое показано в качестве примера на фиг.12, достигнуто, то основание 6 лебедки вместе с грузозахватным устройством 9 оптимально размещено над седельным прицепом 12 для последующего процесса погрузки. Грузозахватное устройство 9 может теперь спускаться, вследствие чего седельный прицеп 12 для последующего процесса захватывания оказывается хорошо размещенным между грейферами 10 в виде лап клещей.
Если применяются не изображения 16, снимаемые посредством камер 14 на основании 6 лебедки, а изображения 16 камер, расположенных на грузозахватном устройстве 9, то получается в конечном итоге тот же самый процесс, при этом грузозахватное устройство 9 именно при ориентировании должно было бы находиться на задаваемой исходной высоте, предпочтительно на максимально возможной высоте, над седельным прицепом 12. Тогда для этой исходной высоты соответственно на изображения 16 могут также накладываться соответствующие вспомогательные графики 18.
Седельные прицепы 12, имеющие цветные панели 41, могут иметь на своей крыше также дополнительные маркировки 48, которые позволяют крановщику различить положение цветных панелей 41 также на виде сверху. Такие маркировки 48 дополнительно указаны на фиг.11 и 12. Их положение обозначено на фиг.10 лежащими дальше внутрь заштрихованными стрелками 42. Эти маркировки 48 могут также использоваться для того, чтобы ориентироваться по соответственно расположенным, здесь на фиг.11 и 12 в каждом случае выполненным в качестве примера u-образными вспомогательным графикам 18. Итак, будет ли крановщик использовать предназначенные для углов 20 вспомогательные графики 18 или предназначенные для маркировок 48 вспомогательные графики 18 или оба вида вспомогательных график 18 для вышеизложенного процесса ориентирования грузозахватного устройства 9, остается на усмотрение крановщика.
Фиг.13-15 наглядно представляют теперь тот же самый образ действий, когда должен захватываться и грузиться не седельный прицеп 12, а изображенный на фиг.13 на виде сбоку, расположенный на низкорамном прицепе 43 грузовика 27 контейнер 13. На фиг.13 стрелки 42 снова показывают плоскость в области верхних углов 20 контейнера 13, которая является решающей при рассмотрении изображений 16 изложенного процесса ориентирования.
На фиг.14 показаны представленные на экране 17 изображения 16 камер 14 основания 6 лебедки перед ориентированием основания 6 лебедки вместе с грузозахватным устройством 9 относительно контейнера 13. На фиг.14 крановщик по вспомогательным графикам 18 без затруднений различает, что грузозахватное устройство 9 еще не размещено надлежащим образом над контейнером 13. Путем соответствующего передвижения крана 1 вдоль первого направления 2, крановой тележки 5 вдоль второго направления 4 и, в зависимости от случая, при необходимом вращении основания 6 лебедки вокруг оси 25 вращения крановщик может теперь передвигать грузозахватное устройство 9 до тех пор, пока не будет достигнута изображенная на фиг.15 ситуация. На фиг.15 наружные контуры контейнера 13 своими углами 20 лежат оптимально между наложенными на изображения 16 вспомогательными графиками 18, так что крановщик теперь простым образом различает, что грузозахватное устройство 9 достаточно точно для последующего процесса погрузки ориентировано над контейнером 13. Когда ситуация в соответствии с фиг.15 достигнута, то грузозахватное устройство 9, с выдвинутыми далеко соответственно длине контейнера 13 грейферными балками 36, может спускаться на контейнер 13 так, чтобы расположенные на грейферных балках 36 грейферные инструменты 11 в виде блокировочных цапф, соответственно, поворотных замков могли вдвигаться в угловые фурнитуры 4, соответственно, угловые фитинги 44 контейнера 13 и там блокироваться. После этого контейнер 13, вися на грузозахватном устройстве 9, может сниматься с низкорамного прицепа 43. Не нужные для этого процесса погрузки контейнера 13 грейферные инструменты 10 в виде лап клещей повернуты при этом в их ранее поясненное неактивное положение, так что они не препятствуют захватыванию контейнера 13 грейферными инструментами 11 в виде блокировочных цапф.
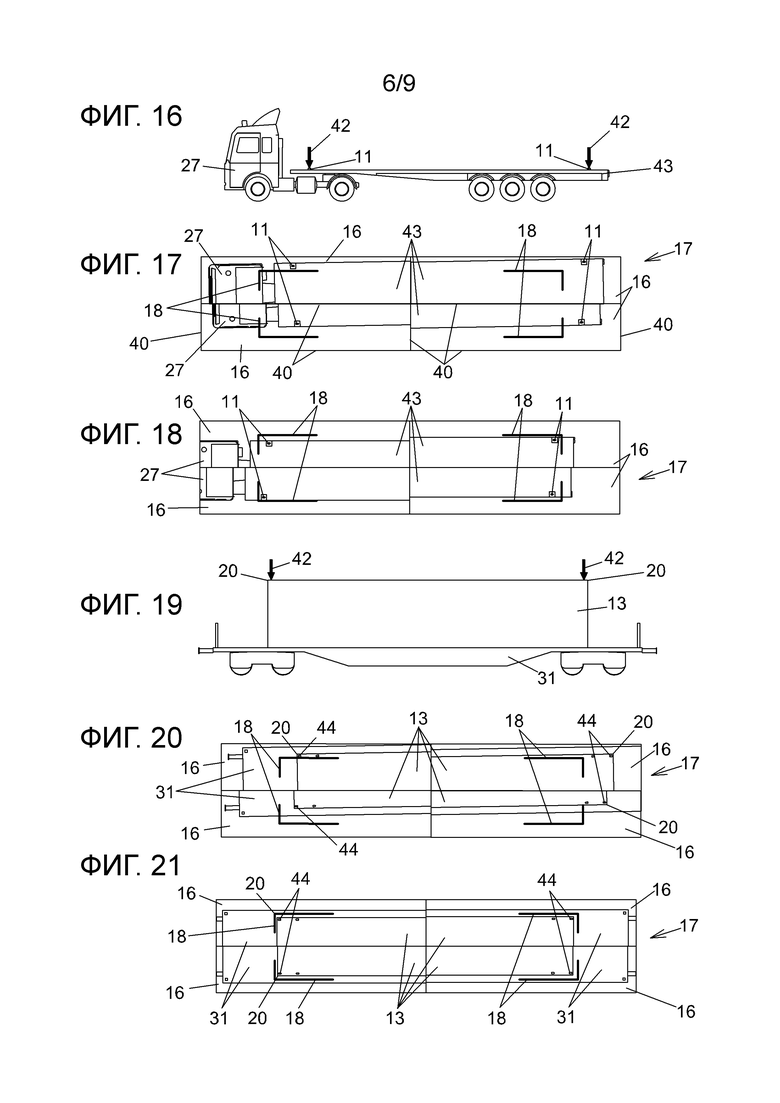
В то время как на фиг.13-15 контейнер 13 должен выгружаться из низкорамного прицепа 43 грузовика 27, на фиг.16-18 в качестве примера показана ситуация, когда грузозахватное устройство 9 вместе с закрепленным на нем контейнером 13 должно размещаться над пустым низкорамным прицепом 43 так, чтобы контейнер 13 мог после этого загружаться на низкорамный прицеп 43. Для этого крановщик должен теперь рассматривать наглядно представленную стрелками 42 на фиг.16 плоскость в области верхней кромки низкорамного прицепа 43. В этой плоскости находятся на низкорамном прицепе 43 также блокировочные цапфы 11, с помощью которых контейнер 13 своими расположенными на донной стороне угловыми фурнитурами 44 может крепиться на низкорамном прицепе 43. На фиг.17 снова показан экран 17 с четырьмя изображениями 16 в ситуации, в которой грузозахватное устройство 9 еще не достаточно хорошо ориентировано над низкорамным прицепом 43. На фиг.18 показана ситуация после соответствующей ориентации грузозахватного устройства 9 изложенным образом над низкорамным прицепом 43. Крановщик посредством наложенных на изображения 16 вспомогательных график 18 и их положения относительно блокировочных цапф 11 на низкорамном прицепе 43 различает, что теперь грузозахватное устройство 9 вместе с закрепленным на нем контейнером 13 идеально, соответственно, по меньшей мере достаточно хорошо размещено над низкорамным прицепом 43, так что после этого грузозахватное устройство 9 вместе с контейнером 13 может опускаться на низкорамный прицеп 43, чтобы загружать контейнер 13 на низкорамный прицеп 43.
На фиг.19 показана ситуация, когда контейнер 13 должен выгружаться из железнодорожного прицепа 31. В этой ситуации крановщиком снова должна рассматриваться плоскость в области верхнего конца контейнера 13 вместе с углами 20, смотри стрелки 42. На фиг.20 снова показан экран 17 с изображениями 16 и наложенными на них вспомогательными графиками 18 перед ориентированием основания 6 лебедки вместе с грузозахватным устройством 9. На фиг.21 показано состояние, когда после передвижения крана 1 вдоль первого направления 2, крановой тележки 5 вдоль второго направления 4 и, в зависимости от случая, необходимого вращения основания 6 лебедки вокруг оси 25 вращения грузозахватное устройство 9 снова достаточно хорошо ориентировано над контейнером 13. В изображенной на фиг.21 ситуации наружные контуры контейнера 13 и в частности, расположенные в углах 20 угловые фурнитуры 44 на верхней стороне контейнера 13, лежат достаточно симметрично внутри обозначенных посредством вспомогательных график 18 областей, так что после этого может происходить движение грузозахватного устройства 9 вниз на контейнер 13 и его крепление к грузозахватному устройству 9 и последующая погрузка.
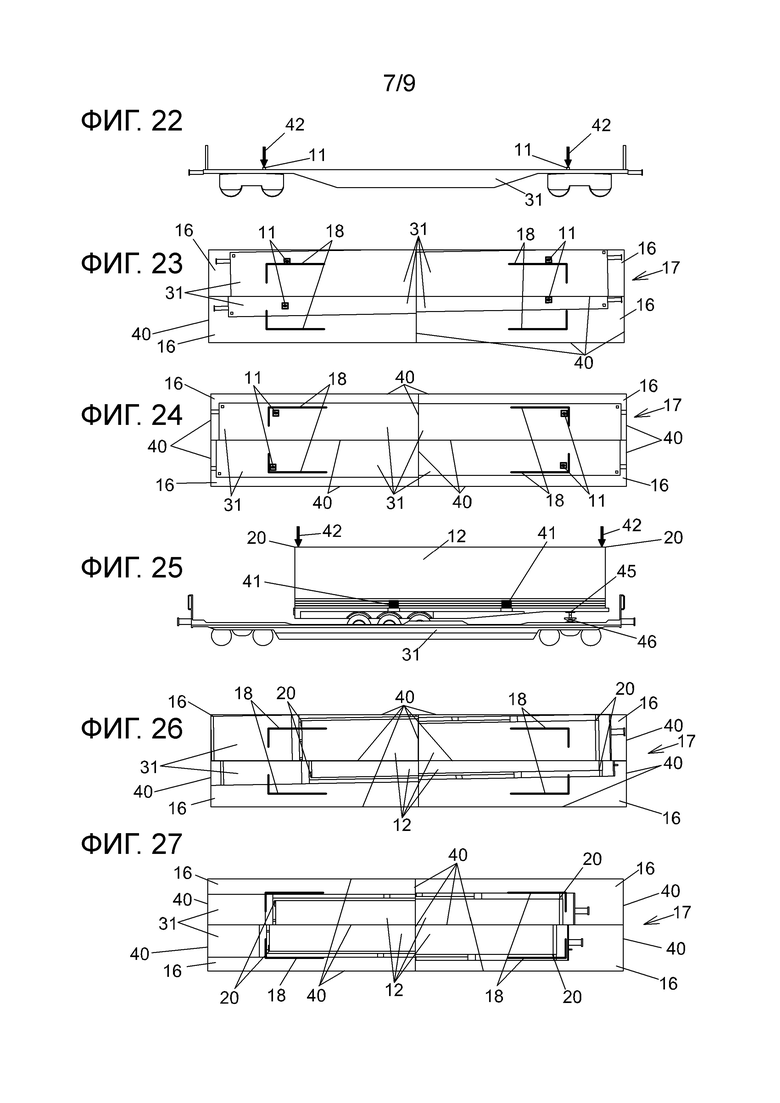
На фиг.22 показана ситуация, в которой на пустой железнодорожный прицеп 31 должен загружаться контейнер 13. Здесь крановщик рассматривает обозначенную стрелками 42 на фиг.22 плоскость на верхней кромке железнодорожного прицепа 31, в которой находятся также грейферные инструменты 11 в виде блокировочных цапф для крепления контейнера 13 на железнодорожном прицепе 31. На фиг.23 снова схематизированным образом показан экран 17 с четырьмя расположенными рядом друг с другом изображениями 16 и наложенными на каждое из них вспомогательными графиками 18, которые определенно показывают крановщику, что грузозахватное устройство 9 вместе с висящим на нем контейнером 13 еще не достаточно хорошо размещено над железнодорожным прицепом 31. На фиг.24 показано, как после соответствующего передвижения крана 1, крановой тележки 5 и, в зависимости от случая, необходимого вращения основания 6 лебедки достигнута ситуация, в которой крановщик по наложенным вспомогательным графикам 18 может различать, что грузозахватное устройство 9 теперь ориентировано достаточно хорошо для последующего процесса выгрузки, то есть загрузки контейнера 13 на железнодорожный прицеп 31.
На фиг.25 показана ситуация, когда седельный прицеп 12 должен выгружаться из железнодорожного прицепа 31, соответственно, вагона-кенгуру. На фиг.25 виден, в т.ч., также сцепной шкворень 45 седельного прицепа 12, а также опорно-сцепное устройство 46 железнодорожного прицепа 31, которое служит для крепления сцепного шкворня 45. При ориентации грузозахватного устройства 9 над седельным прицепом 12 снова рассматривается обозначенная на фиг.25 посредством стрелок 42 верхняя ограничительная плоскость седельного прицепа 12, в которой находятся также верхние углы седельного прицепа 12. На фиг.26 снова показан в качестве примера экран 17 с четырьмя изображениями 16 и наложенными вспомогательными графиками 18 в состоянии, в котором грузозахватное устройство 9 еще не ориентировано над седельным прицепом 12. На фиг.27 показано состояние после процесса ориентирования путем соответствующего передвижения крана 1, крановой тележки 5 и/или путем соответствующего вращения основания 6 лебедки. На фиг.27 крановщик снова по достаточно хорошо ориентированному положению углов 29 относительно вспомогательных график 18 различает, что теперь грузозахватное устройство 9 достаточно точно размещено и ориентировано над седельным прицепом 12 для последующего процесса захватывания.
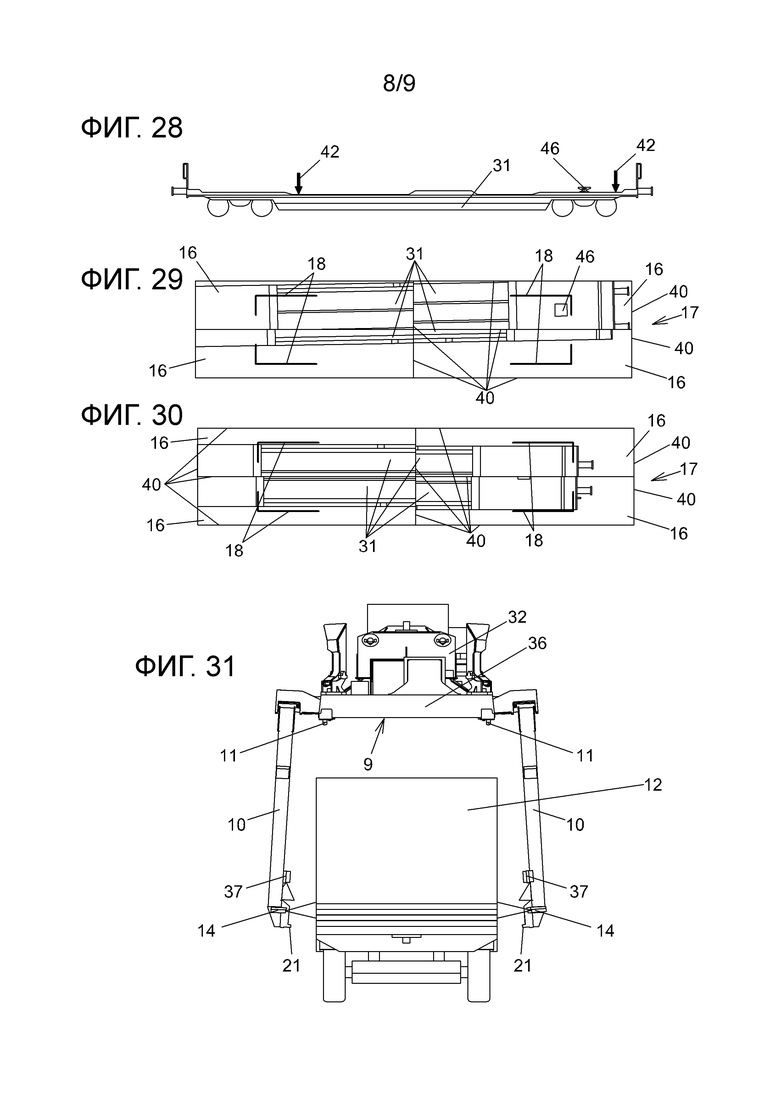
На фиг.28 показана ситуация, в которой соответствующий седельный прицеп 12 должен загружаться на железнодорожный прицеп 31. Здесь должна рассматриваться плоскость, которая обозначена стрелками 42 на фиг.28. На фиг.29 показано еще не ориентированное состояние, а на фиг.30 опять аналогичным образом соответственно хорошо ориентированное состояние, при котором потом седельный прицеп 12 посредством грузозахватного устройства 9 может выгружаться на железнодорожный прицеп 31.
В показанных до сих пор чисто для пояснения примерах применяются всегда четыре камеры 14 для совместного представления их изображений 16 на экране 17 пульта 15 управления. Это не обязательно должно быть так. В принципе, для предлагаемого изобретением образа действий достаточно также одного единственного изображения 16 с одной единственной камеры 14, причем тогда, например, также четыре вспомогательные графики 18 накладываются на это изображение 16. Но можно было бы, например, также работать только с двумя камерами 14 и соответственно на каждое изображение 16 обеих камер 14 накладывать две вспомогательные графики 18, и т.д.
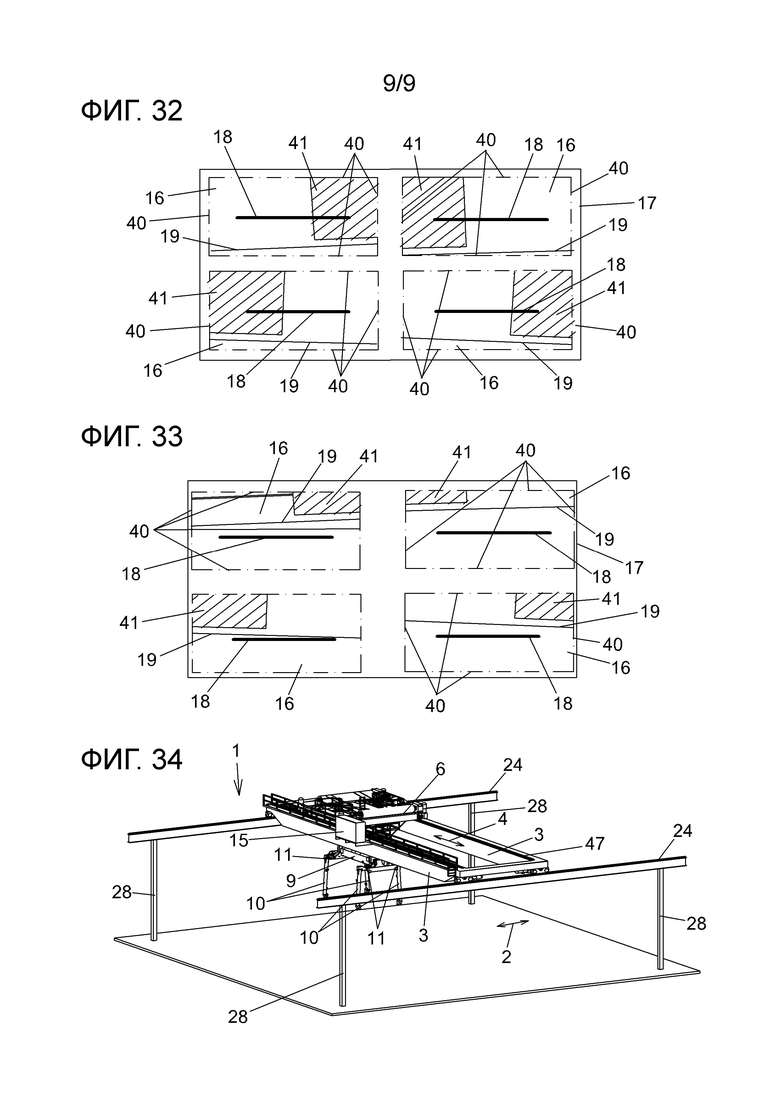
В изложенных до сих пор примерах изобретение применяется для того, чтобы достаточно хорошо ориентировать грузозахватное устройство 9 перед его движением вниз на подлежащий погрузке седельный прицеп 12 или подлежащий погрузке контейнер 13 над ним. С помощью фиг.31-33 теперь ниже поясняется, как изобретение может применяться для того, чтобы помогать крановщику в размещении выполненных в виде лап клещей грейферных инструментов 10 их ножками 21 клещей в области цветных панелей 41 на седельном прицепе 21 так, что при последующем повороте лап клещей к седельному прицепу 12 ножки 21 клещей оптимально хватаются за предусмотренные соответственно для этого грейферные кромки 19 седельного прицепа 12, чтобы после этого можно было поднимать седельный прицеп 12.
На фиг.31 показана ситуация, в которой грузозахватное устройство 9 своими развернутыми разведенными, повернутыми друг от друга) грейферными инструментами 10 в виде лап клещей спускается на седельный прицеп 12 так, что седельный прицеп 12 оказывается между развернутыми лапами клещей. Теперь здесь применяются камеры 14, расположенные на лапах клещей, соответственно, грейферных инструментах 10 в области ножек 21 клещей. Они расположены, смотря горизонтально в сторону, так, что они воспроизводят изображение 16 каждой боковой стенки седельного прицепа 12. При этом следует учитывать, что камеры 14, как и реализовано в этом примере и видно на фиг.6, могут быть установлены на ножках 21 клещей также с некоторым сдвигом в сторону каждая. На сторонах седельного прицепа 12 над грейферными кромками 19, за которые должны хвататься ножки 21 клещей, находятся также соответствующие цветные панели 41, которые известны в уровне техники. На фиг.32 и 33 теперь наглядно показано, как на экране 17 пульта 15 управления изображены по одному изображению 16 каждой такой камеры 14 на лапе клещей, то есть в этом примере всего четыре изображения 16. На каждое из этих изображений накладывается вспомогательная графика 18 в виде вспомогательной линии. На фиг.32 показана ситуация, в которой четыре лапы клещей еще не достаточно хорошо размещены относительно боковой стенки седельного прицепа 12. Крановщик различает это по тому, что вспомогательные линии 18 еще не совпадают с каждой грейферной кромкой 19, а на фиг.32 в качестве примера еще отдельными областями расположены в области каждой цветной панели 41. Несколько перекошенное изображение цветных панелей 41 и грейферных кромок 19 на изображениях 16 на фиг.32 является следствием вышеизложенной боковой установки камер 14 на ножках 21 клещей. При центральном расположении камер 14 на ножках 21 клещей не наблюдалось бы или наблюдалось бы только менее сильно выраженное перекошенное изображение. Это относится также к изображениям 16 на фиг.33.
Путем соответствующего спускания грузозахватного устройства 9 и/или передвижения крана 1 вдоль первого направления 2 и/или крановой тележки 5 вдоль второго направления 4 грузозахватное устройство 9 может потом размещаться так, чтобы лапы клещей своими ножками 21 клещей были достаточно хорошо размещены относительно седельного прицепа 12 для последующего процесса захватывания. Это состояние достигается, когда вспомогательная графика 18 оказывается на грейферной кромке 19 или под ней, так, как это изображено на фиг.33 для всех четырех изображений 16 четырех камер 14 на четырех лапах клещей. Когда это состояние у всех четырех лап клещей достигнуто, то они могут своими ножками 21 клещей поворачиваться к седельному прицепу 12, так чтобы ножки 21 клещей подхватывали грейферные кромки 19 седельного прицепа 12 и после этого седельный прицеп 12 мог подниматься грузозахватным устройством 9.
Удобным образом на каждой лапе клещей, соответственно, грейферном инструменте 10 находится соответствующая камера 14, так что, как изображено на фиг.32 и 33, получаются соответствующие четыре изображения 16, которые, как тоже изображено на фиг.32 и 33, представляются либо совместно на экране 17, либо на отдельных друг от друга экранах 17, причем на каждый накладывается соответствующая вспомогательная графика 18. В принципе, вследствие имеющихся симметрий в соответствии с изобретением можно также работать только с одной, двумя или тремя камерами 14 и соответствующим количеством изображений 16 на соответствующих лапах клещей.
Изображения 16 на фиг.33 наглядно представляют также, что грейферные кромки не обязательно должны оказываться точно на вспомогательных графиках 18, чтобы крановщик мог запускать процесс захватывания. На изображениях 16 на фиг.33, несмотря на перекошенное представление и неточное ориентирование вспомогательных график 18 по грейферным кромкам 19, напротив, крановщику хорошо различимо, что теперь достигнуто положение, в котором ножки 21 клещей настолько опущены и хорошо размещены, что может проводиться процесс захватывания. Это, конечно, только один из примеров того, что вспомогательные графики 18 уже могут давать нужную крановщику информацию даже тогда, когда не осуществляется точная ориентация.
Также изображенные на фиг.31 дополнительные камеры 37 на лапах клещей, которые смотрят вертикально вниз, могут применяться как дополнительная страховка и помощь крановщику при опускании грузозахватного устройства 9.
Как уже пояснялось выше, предлагаемые изобретением краны не обязательно должны представлять собой так называемые портальные краны, как это изображено в первом примере осуществления. На фиг.34 показан в качестве примера так называемый мостовой кран, у которого главные балки 3 установлены с возможностью передвижения посредством колес 23 вдоль первого направления 2 по направляющим рельсам 24 туда и обратно. Направляющие рельсы 24 на фиг.34 опираются на несущую конструкцию 28. Но они могут быть, конечно, с тем же успехом установлены на стенах здания или тому подобном. Во всяком случае, выполненный в виде мостового крана кран 1 на фиг.34 аналогично, как пояснялось в первом примере осуществления, может быть оснащен соответствующими камерами 14 у экрана 17 и т.д., так что и такие краны 1 могут выполняться в соответствии с изобретением и эксплуатироваться посредством предлагаемого изобретением способа.
В показанных здесь примерах осуществления грузы в виде седельных прицепов 12 и контейнеров 13 грузятся в соответствии с изобретением. Но изобретение, конечно, не ограничено этим, а может использоваться, в частности при соответственно выполненных грейферных инструментах, также для погрузки других грузов.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 Кран
2 Первое направление
3 Главная балка
4 Второе направление
5 Крановая тележка
6 Основание лебедки
7 Канат
8 Вертикальное направление
9 Грузозахватное устройство
10 Грейферный инструмент
11 Грейферный инструмент
12 Седельный прицеп
13 Контейнер
14 Камера
15 Пульт управления
16 Изображение
17 Экран
18 Вспомогательная графика
19 Грейферная кромка
20 Угол
21 Ножка клещей
22 Вертикальная опора
23 Колесо
24 Направляющий рельс
25 Ось вращения
26 Направление вращения
27 Грузовик
28 Несущая конструкция
29 Крановый рельс
30 Железнодорожный рельс
31 Железнодорожный прицеп
32 Блочная рама
33 Первая ось поворота
34 Вторая ось поворота
35 Телескоп
36 Грейферная балка
37 Дополнительная камера
38 Первое направление поворота
39 Второе направление поворота
40 Граница изображения
41 Цветная панель
42 Стрелка
43 Низкорамный прицеп
44 Угловая фурнитура
45 Сцепной шкворень
46 Опорно-сцепное устройство
47 Ходовой рельс
48 Маркировка
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1973 |
|
SU484160A1 |
| Подъемный кран с жестко подвешенным захватным органом | 1960 |
|
SU139058A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Подвижный подъемник для автомобилей | 1989 |
|
SU1721000A1 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |
| ЗАХВАТ ДЛЯ КОНТЕЙНЕРОВ | 1997 |
|
RU2151095C1 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
Изобретение относится к мостовым грузоподъемным кранам. Кран (1), имеющий по меньшей мере одну передвигаемую главную балку (3) и опирающуюся на указанную по меньшей мере одну главную балку (3) с возможностью передвижения крановую тележку (5). На крановой тележке (5) закреплено основание (6) лебедки, и на этом основании (6) лебедки висит передвигающееся посредством канатов (7) в вертикальном направлении (8) вверх и вниз грузозахватное устройство (9). Грузозахватное устройство (9) имеет грейферные инструменты (10, 11) для разъемного захватывания груза, и кран (1) имеет по меньшей мере одну камеру (14) и по меньшей мере один пульт (15) управления для крановщика. Пульт (15) управления имеет по меньшей мере один экран (17). На по меньшей мере одном экране (17) на воспроизведение снимаемого в каждый момент камерой (14) изображения (16) дополнительно может накладываться по меньшей мере одна вспомогательная графика (18) в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства (9) и/или грейферного инструмента (10, 11) грузозахватного устройства (9) относительно подлежащего грейферованию груза. Достигается улучшение захвата груза. 2 н. и 8 з.п. ф-лы, 34 ил.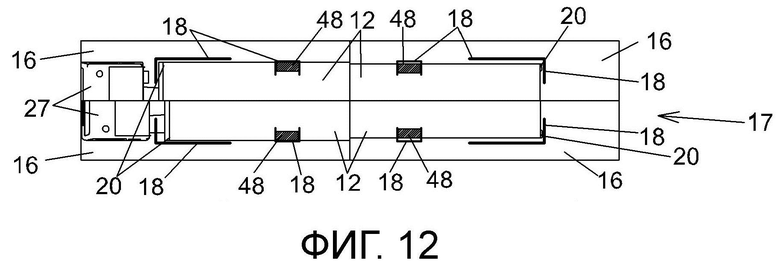
1. Кран (1), имеющий по меньшей мере одну передвигаемую вдоль первого направления (2) туда и обратно главную балку (3) и опирающуюся на указанную по меньшей мере одну главную балку (3) с возможностью передвижения вдоль второго направления (4) туда и обратно крановую тележку (5), при этом первое направление (2) и второе направление (4) ориентированы ортогонально друг другу, и на крановой тележке (5), в частности с возможностью вращения, закреплено основание (6) лебедки, и на этом основании (6) лебедки подвешено передвигаемое посредством канатов (7) в вертикальном направлении (8) вверх и вниз грузозахватное устройство (9), причем это грузозахватное устройство (9) имеет грейферные инструменты (10, 11) для разъемного захвата груза, в частности седельного прицепа (12) и/или контейнера (13), и этот кран (1) имеет по меньшей мере одну камеру (14) и по меньшей мере один пульт (15) управления для крановщика для передвижения указанной по меньшей мере одной главной балки (3), крановой тележки (5) и грузозахватного устройства (9), а также для обслуживания грейферных инструментов (10, 11) грузозахватного устройства (9), и этот пульт (15) управления имеет по меньшей мере один экран (17) для воспроизведения снимаемого в каждый момент камерой (14) изображения (16),
отличающийся тем, что на указанном по меньшей мере одном экране (17) на воспроизведение снимаемого в каждый момент камерой (14) изображения (16) дополнительно обеспечена возможность наложения по меньшей мере одной вспомогательной графики (18) в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства (9) и/или грейферного инструмента (10, 11) грузозахватного устройства (9) относительно подлежащего захватыванию груза.
2. Кран (1) по п.1, отличающийся тем, что вспомогательная графика (18) включает в себя по меньшей мере одну вспомогательную линию для ориентирования по грейферной кромке (19) подлежащего захватыванию груза или по меньшей мере две ориентированные ортогонально друг другу вспомогательные линии для ориентирования по углу (20) подлежащего захватыванию груза.
3. Кран (1) по п.1 или 2, отличающийся тем, что указанная по меньшей мере одна камера (14) установлена на основании (6) лебедки или на грузозахватном устройстве (9) и ориентирована смотря вертикально вниз.
4. Кран (1) по одному из пп.1-3, отличающийся тем, что на основании (6) лебедки или на грузозахватном устройстве (9) дистанцированно друг от друга установлены четыре ориентированные, смотря вертикально вниз, камеры (14), и снимаемые в каждый момент изображения (16) этих четырех камер (14) являются воспроизводимыми в четырех отдельных секторах рядом друг с другом на указанном по меньшей мере одном экране (17) вместе с каждой по меньшей мере одной наложенной вспомогательной графикой (18).
5. Кран (1) по одному из пп.1-4, отличающийся тем, что грузозахватное устройство (9) имеет в качестве грейферных инструментов (10) установленные с возможностью поворота лапы клещей для захватывания седельного прицепа (12), и по меньшей мере на одной из этих лап клещей расположена камера (14), смотрящая горизонтально в сторону.
6. Кран (1) по п.5, отличающийся тем, что камера (14) расположена в нижней концевой области лапы клещей в области ножки (21) клещей этой лапы клещей.
7. Кран (1) по одному из пп.1-6, отличающийся тем, что он имеет две передвигаемые вдоль первого направления туда и обратно главные балки (3), на которые с возможностью передвижения туда и обратно вдоль второго направления (4) опирается крановая тележка (5).
8. Кран (1) по одному из пп.1-7, отличающийся тем, что этот кран (1) представляет собой портальный кран, имеющий передвигаемые на колесах (23) вертикальные опоры (22), при этом указанная или указанные главные балки (3) опираются на эти вертикальные опоры (22) и вместе с вертикальными опорами (22) имеет, соответственно, имеют возможность перемещения на колесах (23) туда и обратно вдоль упомянутого первого направления (2).
9. Кран (1) по одному из пп.1-7, отличающийся тем, что этот кран (1) представляет собой мостовой кран, при этом указанная или указанные главные балки (3) имеет, соответственно, имеют возможность перемещения туда и обратно вдоль упомянутого первого направления (2) посредством колес (23) по направляющим рельсам (24).
10. Способ эксплуатации крана (1) по одному из пп.1-9, отличающийся тем, что на указанном по меньшей мере одном экране (17) на воспроизведение снимаемого в каждый момент камерой (14) изображения (16) дополнительно накладывают по меньшей мере одну вспомогательную графику (18) в качестве вспомогательного средства для крановщика для ориентирования грузозахватного устройства (9) и/или грейферного инструмента (10, 11) грузозахватного устройства (9) относительно подлежащего захватыванию груза.
| Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов | 2020 |
|
RU2726576C1 |
| KR 0200313698 Y1, 10.10.2003 | |||
| WO 2019118992 A1, 27.06.2019 | |||
| US 20170247094 A1, 31.08.2017. | |||

