ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известно устройство помощи при вождении, которое предотвращает столкновение со встречным транспортным средством, когда существует вероятность того, что встречное транспортное средство может выдвинуться со встречной полосы движения на свою полосу движения (патентный документ 1). Изобретение, раскрытое в патентном документе 1, определяет, перекрывается ли маршрут проезда встречного транспортного средства со своей полосой движения в соответствии с расстоянием между припаркованным транспортным средством на встречной полосе движения и центральной линией дороги. Изобретение, раскрытое в патентном документе 1, заставляет рассматриваемое транспортное средство останавливаться или замедляться, когда определено, что маршрут проезда встречного транспортного средства перекрывается со своей полосой движения.
СПИСОК ЦИТИРУЕМЫХ ДОКУМЕНТОВ
ПАТЕНТНЫЙ ДОКУМЕНТ
[0003]
Патентный документ 1: Публикация не прошедшей экспертизу японской патентной заявки № 2008-102690
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0004]
Изобретение, раскрытое в патентном документе 1, не принимает во внимание намерение водителя встречного транспортного средства и, таким образом, может вызвать излишнее торможение или остановку рассматриваемого транспортного средства, даже если рассматриваемое транспортное средство и встречное транспортное средство могут проехать без близкого сближения.
[0005]
Для решения обычной проблемы, описанной выше, настоящее изобретение обеспечивает способ управления транспортным средством и устройство управления транспортным средством, выполненные с возможностью учета намерения водителя встречного транспортного средства.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0006]
Способ управления транспортным средством согласно аспекту настоящего изобретения определяет местоположение неподвижного объекта на дороге, по которой движется рассматриваемое транспортное средство, определяет скорость рассматриваемого транспортного средства, определяет местоположение и скорость встречного транспортного средства, движущегося в направлении, противоположном направлению движения рассматриваемого транспортного средства на встречной полосе, смежной с полосой движения, по которой движется рассматриваемое транспортное средство, устанавливает область на дороге, определенную в направлении продолжения дороги, включающую в себя неподвижный объект, вычисляет местоположение проезда, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, в соответствии со скоростью рассматриваемого транспортного средства и местоположением и скоростью встречного транспортного средства, устанавливает пороговое значение скорости, которое тем больше, чем больше расстояние между неподвижным объектом и встречным транспортным средством, заставляет рассматриваемое транспортное средство замедляться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от стационарного объекта на заданное расстояние больше или равно пороговому значению скорости, соответствующему местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние в случае, когда местоположение проезда присутствует в пределах упомянутой области, и заставляет рассматриваемое транспортное средство сохранять скорость или ускоряться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленного от неподвижного объекта на заданное расстояние, меньше порогового значения скорости, соответствующего местоположению встречного транспортного средства, удаленного от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах упомянутой области.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0007]
Настоящее изобретение учитывает намерение водителя встречного транспортного средства, чтобы избежать резкого торможения или ненужного ускорения или замедления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
Фиг. 1 является блок-схемой конфигурации устройства управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является изображением, поясняющим пример способа установки линии перестроения согласно первому варианту осуществления настоящего изобретения.
Фиг. 3А является изображением, поясняющим пример способа определения скорости согласно первому варианту осуществления настоящего изобретения.
Фиг. 3B является изображением, поясняющим пример способа определения скорости согласно первому варианту осуществления настоящего изобретения.
Фиг. 3C является изображением, поясняющим пример способа определения скорости согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является изображением, поясняющим случай проезда по узкой дороге согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является изображением, поясняющим другой пример способа установки линии перестроения согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является изображением, поясняющим другой пример способа определения скорости согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является изображением, поясняющим еще один пример способа установки линии перестроения согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является изображением, поясняющим еще один пример способа установки линии перестроения согласно первому варианту осуществления настоящего изобретения.
Фиг. 9 является изображением, поясняющим еще один пример способа установки линии перестроения согласно первому варианту осуществления настоящего изобретения.
Фиг. 10 является блок схемой последовательности операций, поясняющей пример работы устройства управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 11 является блок схемой последовательности операций, поясняющей пример работы устройства управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 12 является блок схемой последовательности операций, поясняющей пример работы устройства управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 13 является блок-схемой конфигурации устройства управления транспортным средством согласно второму варианту осуществления настоящего изобретения.
Фиг. 14 является изображением, поясняющим пороговое значение скорости согласно второму варианту осуществления настоящего изобретения.
Фиг. 15 является изображением, поясняющим пороговое значение скорости согласно второму варианту осуществления настоящего изобретения.
Фиг. 16 является изображением, поясняющим пороговое значение скорости согласно второму варианту осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Далее со ссылкой на чертежи описаны некоторые варианты осуществления согласно настоящему изобретению. Одни и те же элементы, проиллюстрированные на чертежах, обозначены одними и теми же ссылочными позициями, и дублирующиеся пояснения ниже не приводятся.
[0010]
Первый вариант осуществления
<Пример конфигурации устройства управления транспортным средством>
Пример конфигурации устройства 1 управления транспортным средством согласно первому варианту осуществления описан ниже со ссылкой на фиг. 1. Как показано на фиг. 1, устройство 1 управления транспортным средством включает в себя приемник 10 GPS, датчик 11, картографическую базу 12 данных, контроллер 20 и несколько видов исполнительных механизмов 30.
[0011]
Устройство 1 управления транспортным средством может быть установлено либо на транспортном средстве, оснащенном функцией автоматического вождения, либо на транспортном средстве, не оборудованном функцией автоматического вождения. Устройство 1 управления транспортным средством может быть установлено на транспортном средстве, способном переключаться между автоматическим и ручным вождением. Термин «автоматическое вождение», используемый в первом варианте осуществления, относится к состоянию, в котором по меньшей мере любой из исполнительных механизмов, таких как тормоз, акселератор и рулевое колесо, управляется без вмешательства находящегося в транспортном средстве человека. Таким образом, автоматическое вождение может включать в себя состояние, в котором другие исполнительные механизмы управляются находящимся в транспортном средстве человеком. Автоматическое вождение также относится к состоянию, в котором требуется только выполнение любого управления, такого как управление ускорением/замедлением и управление поперечным позиционированием. Термин «ручное вождение», используемый в первом варианте осуществления, относится к состоянию, в котором находящийся в транспортном средстве человек, например, управляет тормозом, акселератором и рулевым колесом.
[0012]
Приемник 10 GPS принимает радиоволны от искусственного спутника для обнаружения информации о местоположении рассматриваемого транспортного средства на земле. Информация о местоположении рассматриваемого транспортного средства, обнаруженная приемником 10 GPS, включает в себя информацию о широте и информацию о долготе. Приемник 10 GPS выводит обнаруженную информацию о местоположении рассматриваемого транспортного средства в контроллер 20. Способ обнаружения информации о местоположении рассматриваемого транспортного средства не ограничивается приемником 10 GPS. Например, одометрия может использоваться для оценки местоположения рассматриваемого транспортного средства. Одометрия является способом получения количества движения и направления движения транспортного средства в соответствии с углом поворота и угловой скоростью транспортного средства, чтобы оценить местоположение транспортного средства.
[0013]
Датчик 11 представляет собой устройство, установленное на рассматриваемом транспортном средстве, для обнаружения объектов вокруг рассматриваемого транспортного средства. Датчик 11 включает в себя несколько типов датчиков, таких как камера, лидар, радар, радар миллиметрового диапазона, лазерный дальномер и звуковой локатор. Датчик 11 обнаруживает в качестве объектов вокруг рассматриваемого транспортного средства движущиеся объекты, включая другие транспортные средства, мотоциклы, велосипеды и пешеходов, и неподвижные объекты, включая препятствия, упавшие объекты и припаркованные транспортные средства. Датчик 11 также определяет местоположение, угловое пространственное положение (угол рыскания), размер, скорость, степень ускорения, степень замедления и скорость рыскания соответствующих движущихся объектов и неподвижных объектов по отношению к рассматриваемому транспортному средству. Датчик 11 может также включать в себя другие датчики, такие как датчик скорости вращения колеса (второй датчик), датчик угла поворота рулевого колеса и гироскопический датчик. Датчик скорости вращения колеса определяет скорость вращения колес рассматриваемого транспортного средства. Определение скорости вращения может получить скорость рассматриваемого транспортного средства. Датчик 11 выводит обнаруженную информацию в контроллер 20.
[0014]
Картографическая база 12 данных представляет собой базу данных, хранящуюся, например, в автомобильном навигационном устройстве, и включает в себя картографическую информацию, такую как информация о дорогах и информация об объектах, необходимую для навигации по маршруту. Информация о дорогах относится к информации о количестве полос движения на дороге, граничных линиях дорог и отношению соединения полос движения. Картографическая база 12 данных выводит картографическую информацию в контроллер 20 в ответ на запрос от контроллера 20. Хотя первый вариант осуществления проиллюстрирован для случая, когда устройство 1 управления транспортным средством включает в себя картографическую базу 12 данных, устройство 1 управления транспортным средством не обязательно включает в себя картографическую базу 12 данных. Картографическая информация может быть получена датчиком 11 или может быть получена посредством связи транспортное средство-транспортное средство или связи дорога-транспортное средство. Когда картографическая информация хранится на сервере, установленном снаружи, устройство 1 управления транспортным средством может получать картографическую информацию с сервера посредством связи по мере необходимости. Устройство 1 управления транспортным средством может регулярно получать самую последнюю картографическую информацию с сервера, чтобы обновлять сохраненную картографическую информацию.
[0015]
Контроллер 20 представляет собой микрокомпьютер общего назначения, включающий в себя центральный процессор (ЦП), память и блок ввода-вывода. Компьютерная программа установлена на микрокомпьютер, чтобы функционировать как устройство 1 управления транспортным средством. Микрокомпьютер функционирует как множество схем обработки информации, включенных в устройство 1 управления транспортным средством, когда выполняется компьютерная программа. Хотя настоящий вариант осуществления проиллюстрирован в случае, когда программное обеспечение установлено для изготовления соответствующих схем обработки информации, включенных в устройство 1 управления транспортным средством, для составления схем обработки информации может быть подготовлено специальное аппаратное обеспечение для выполнения каждой обработки информации, как описано ниже. Соответствующие схемы обработки информации могут состоять из индивидуального аппаратного обеспечения. Контроллер 20 включает в себя, в качестве примеров множества схем обработки информации, блок 21 установки линии перестроения, блок 22 установки стоп-линии, блок 23 установки области запрета проезда, блок 24 вычисления местоположения проезда, блок 25 определения скорости, и блок 26 управления транспортным средством.
[0016]
Блок 21 установки линии перестроения объединяет информацию о местоположении рассматриваемого транспортного средства, выведенную из приемника 10 GPS, и местоположение движущегося объекта или неподвижного объекта, выведенное из датчика 11, с картографической информацией, выведенной из картографической базы 12 данных, и генерирует картографическую информацию, включающую в себя местоположение рассматриваемого транспортного средства и местоположение движущегося объекта или неподвижного объекта. Блок 21 установки линии перестроения устанавливает виртуальную линию перестроения на карте, проходящую в направлении ширины полосы движения на встречной полосе движения, смежной с полосой движения, по которой движется рассматриваемое транспортное средство. Например, при обнаружении припаркованного транспортного средства на встречной полосе движения блок 21 установки линии перестроения устанавливает линию перестроения на карте на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства на заданное расстояние в направлении движения рассматриваемого транспортного средства. Термин «местоположение», используемый здесь, относится к местоположению на карте, если не указано иное.
[0017]
Блок 22 установки стоп-линии устанавливает виртуальную стоп-линию, проходящую в направлении ширины полосы движения в полосе движения, по которой движется рассматриваемое транспортное средство. Например, при обнаружении припаркованного транспортного средства на встречной полосе движения блок 22 установки стоп-линии устанавливает стоп-линию на полосе движения в местоположении, удаленном от припаркованного транспортного средства на заданное расстояние в направлении движения встречного транспортного средства. Встречное транспортное средство является транспортным средством, движущимся по встречной полосе движения. Стоп-линия устанавливается в местоположении, в котором рассматриваемое транспортное средство может остановиться с заданной степенью замедления после начала замедления из текущего местоположения. Стоп-линия также устанавливается в местоположении, в котором рассматриваемое транспортное средство может избежать столкновения со встречным транспортным средством, которое движется по встречной полосе движения и может выезжать на полосу движения, чтобы объехать припаркованное транспортное средство. Заданное расстояние, используемое для установки линии перестроения, может быть таким же или отличным от заданного расстояния, используемого для установки стоп-линии.
[0018]
Блок 23 установки области запрета проезда устанавливает область запрета проезда в соответствии с линией перестроения и стоп-линией, установленными блоком 21 установки линии перестроения и блоком 22 установки стоп-линии. Блок 23 установки области запрета проезда задает в качестве области запрета проезда область, включающую в себя линию перестроения и стоп-линию на дороге, определенную между линией перестроения и стоп-линией. Область запрета проезда устанавливается на дороге вокруг припаркованного транспортного средства. Первый вариант осуществления устанавливает область запрета проезда в качестве области, в которой рассматриваемому транспортному средству запрещено проезжать встречное транспортное средство.
[0019]
Блок 24 вычисления местоположения проезда определяет, присутствует ли местоположение, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, в области запрета проезда, установленной блоком 23 установки области запрета проезда. В частности, блок 24 вычисления местоположения проезда вычисляет местоположение проезда, в котором рассматриваемое транспортное средство проезжает встречное транспортное средство, в соответствии с относительным расстоянием между рассматриваемым транспортным средством и встречным транспортным средством, скоростью рассматриваемого транспортного средства и скоростью встречного транспортного средства. Блок 24 вычисления местоположения проезда затем определяет, присутствует ли вычисленное местоположение проезда в области запрета проезда. Относительное расстояние между рассматриваемым транспортным средством и встречным транспортным средством, скорость рассматриваемого транспортного средства и скорость встречного транспортного средства определяются датчиком 11.
[0020]
Когда блок 24 вычисления местоположения проезда определяет, что местоположение проезда присутствует в области запрета проезда, блок 25 определения скорости оценивает намерение водителя встречного транспортного средства, когда встречное транспортное средство находится в ручном режиме вождения, или оценивает действие, ожидаемое устройством управления вождением встречного транспортного средства, когда встречное транспортное средство находится в автоматическом режиме вождения (вместе именуемые ниже как «намерение встречного транспортного средства»), чтобы определять скорость рассматриваемого транспортного средства. Следующие пояснения выполнены исходя из предположения, что встречное транспортное средство находится в ручном режиме вождения и управляется водителем в иллюстративных целях и для краткости. Намерение встречного транспортного средства подробно описано ниже.
[0021]
Блок 26 управления транспортным средством управляет соответствующими исполнительными механизмами 30, чтобы заставить рассматриваемое транспортное средство двигаться со скоростью, определяемой блоком 25 определения скорости. Исполнительные механизмы 30 включают в себя исполнительный механизм тормоза, исполнительный механизм педали акселератора и исполнительный механизм рулевого управления.
[0022]
Пример способа установки линии перестроения описан ниже со ссылкой на фиг. 2. На фиг. 2 показана дорога с одной полосой движения в каждом направлении. На фиг. 2 показан случай, когда рассматриваемое транспортное средство 50 движется влево, а встречное транспортное средство 51 движется вправо. Направление движения рассматриваемого транспортного средства 50 противоположно направлению движения встречного транспортного средства 51. Полоса движения, по которой движется рассматриваемое транспортное средство 50, называется здесь полосой движения, а полоса движения, по которой движется встречное транспортное средство 51, называется встречной полосой движения. Встречная полоса движения расположена рядом с полосой движения.
[0023]
В ситуации, показанной на фиг. 2, предполагается, что припаркованное транспортное средство 52 и встречное транспортное средство 51 обнаруживаются датчиком 11. В частности, предполагается, что датчик 11 обнаруживает информацию о местоположении и скорости припаркованного транспортного средства 52 и информацию о местоположении и скорости встречного транспортного средства 51. Например, информация о местоположении припаркованного транспортного средства 52 и информация о местоположении встречного транспортного средства 51 обнаруживаются лазерным дальномером (первым датчиком, третьим датчиком). Лазерный дальномер излучает радиоволны для сканирования объектов (в данном случае припаркованного транспортного средства 52 и встречного транспортного средства 51) и измеряет отраженные радиоволны, чтобы определить расстояние и направление до соответствующих объектов. Местоположение припаркованного транспортного средства 52 и местоположение встречного транспортного средства 51 каждое могут быть определены как относительное местоположение по отношению к местоположению рассматриваемого транспортного средства 50 или определены как местоположение по координатам на основе местоположения рассматриваемого транспортного средства 50 в качестве начала координат.
[0024]
Скорость припаркованного транспортного средства 52 и скорость встречного транспортного средства 51 определяются, например, камерой (четвертым датчиком). Извлекается разница между текущим изображением, захваченным камерой, и изображением непосредственно предыдущего кадра, чтобы получить скорость припаркованного транспортного средства 52 и скорость встречного транспортного средства 51. Частота кадров камеры может быть, но не обязательно, установлена на 30 кадров в секунду (кадров/с) или 60 кадров/с. Припаркованное транспортное средство 52 в первом варианте осуществления определяется как неподвижный объект, поскольку определяется, что скорость припаркованного транспортного средства 52 определяется как равная нулю. А именно, объект, обнаруженный около рассматриваемого транспортного средства 50, определяется как неподвижный объект, когда скорость объекта равна нулю или имеет довольно низкую скорость, так что предполагается, что она приблизительно равна нулю. Хотя первый вариант осуществления иллюстрирует припаркованное транспортное средство 52 как неподвижный объект, неподвижный объект не ограничивается припаркованным транспортным средством 52. Примеры неподвижных объектов включают в себя упавший объект и пилон (также называемый дорожным столбиком). Припаркованное транспортное средство 52 находится на встречной полосе.
[0025]
Как показано на фиг. 2, блок 21 установки линии перестроения устанавливает виртуальную линию 60 перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения рассматриваемого транспортного средства 50. Как показано на фиг. 2, блок 22 установки линии перестроения устанавливает виртуальную линию 61 перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения рассматриваемого транспортного средства 51.
[0026]
После того, как линия 60 перестроения и стоп-линия 61 установлены блоком 21 установки линии перестроения и блоком 22 установки стоп-линии, блок 23 установки области запрета проезда устанавливает область R запрета проезда, включающую в себя линию 60 перестроения и стоп-линию 61 на дороге, определенную в области между линией 60 перестроения и стоп-линией 61. В частности, как показано на фиг. 2, область R запрета проезда представляет собой область, включающую линию 60 перестроения и стоп-линию 61 и определена линией 60 перестроения и стоп-линией 61 на дороге. Форма области R запрета проезда может быть определена соответствующим образом и может быть, например, прямоугольной. Причина установки области R запрета проезда состоит в том, чтобы предотвратить столкновение между встречным транспортным средством 51 и рассматриваемым транспортным средством 50, когда встречное транспортное средство 51 проезжает рассматриваемое транспортное средство 50, избегая припаркованного транспортного средства 52. В этом случае, припаркованное транспортное средство 52 находится в области R запрета проезда.
[0027]
После того как область R запрета проезда установлена блоком 23 установки области запрета проезда, блок 24 вычисления местоположения проезда определяет, присутствует ли местоположение, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга, в области R запрета проезда. В частности, как показано на фиг. 2, блок 24 вычисления местоположения проезда вычисляет местоположение P1, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга в соответствии с относительным расстоянием L между рассматриваемым транспортным средством 50 и встречным транспортным средством 51 (расстоянием от местоположения рассматриваемого транспортного средства 50, если оно определено как начало координат), скоростью V1 рассматриваемого транспортного средства 50 и скоростью V2 встречного транспортного средства 51. Местоположение проезда P1 рассчитывается по следующему уравнению:
P1=L/(1+V2/V1).
[0028]
Блок 24 вычисления местоположения проезда определяет, присутствует ли вычисленное местоположение P1 проезда в области R запрета проезда. На фиг. 2 показан случай, в котором местоположение P1 проезда присутствует в области R запрета проезда.
[0029]
Когда блок 24 вычисления местоположения проезда определяет, что местоположение Р1 проезда присутствует в области R запрета проезда, блок 25 определения скорости оценивает намерение водителя встречного транспортного средства 51, чтобы определить скорость рассматриваемого транспортного средства 50. В ситуации, проиллюстрированной на фиг. 2, в качестве намерения водителя встречного транспортного средства 51 предполагается два случая. Одним из намерений является случай, когда встречное транспортное средство 51 проезжает припаркованное транспортное средство 52 до того, как рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 51, а другим является случай, когда встречное транспортное средство 51 проезжает припаркованное транспортное средство 52 после того, как рассматриваемое транспортное средство 50 проезжает припаркованное транспортное средство 52. А именно, намерение водителя встречного транспортного средства 51, которое необходимо определить, состоит в том, ожидает ли встречное транспортное средство 51, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52.
[0030]
Причина оценки намерения водителя встречного транспортного средства 51 заключается в том, что рассматриваемое транспортное средство 50 может избежать резкого торможения или ненужного ускорения или замедления, когда скорость рассматриваемого транспортного средства 50 определяется в соответствии с оценкой намерения водителя встречного транспортного средства 51. Например, когда намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, пока рассматриваемое транспортное средство 50 проедет, рассматриваемое транспортное средство 50 может поддерживать скорость или ускоряться, чтобы проехать припаркованное транспортное средство 52. Когда намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52 не дожидаясь рассматриваемого транспортного средства 50, рассматриваемое транспортное средство 50 может замедлиться, чтобы плавно остановиться в местоположении (снаружи области R запрета проезда), в которой рассматриваемое транспортное средство 50 может предотвратить столкновение со встречным транспортным средством 51, которое может выдвинуться в сторону полосы движения, чтобы избежать припаркованного транспортного средства 52.
[0031]
Если намерение водителя встречного транспортного средства 51 не оценивается, рассматриваемое транспортное средство 50 может быть вынуждено совершить резкое торможение или ненужное ускорение или замедление. Например, когда заблокированная площадь, вызванная припаркованным транспортным средством 52, большая, или, когда вокруг припаркованного транспортного средства 52 есть пешеходный переход, встречное транспортное средство 51 будет ускоряться, чтобы проехать припаркованное транспортное средство 52 после кратковременного замедления или остановки для безопасности. В таком случае рассматриваемое транспортное средство 50 сначала начинает ускоряться, поскольку местоположение Р1 проезда временно смещается в сторону встречного транспортного средства 51 из-за замедления встречного транспортного средства 51. Однако рассматриваемому транспортному средству 50 вскоре потребуется замедлиться, потому что встречное транспортное средство 51 снова ускоряется, и местоположение Р1 проезда затем смещается в сторону рассматриваемого транспортного средства 50. В случае, когда встречное транспортное средство 51 проезжает припаркованное транспортное средство 52 перед рассматриваемым транспортным средством 50, который включает в себя случай, когда встречное транспортное средство 51 сначала замедляется, а затем начинает ускоряться, чтобы проехать припаркованное транспортное средство 52, управление ускорением/замедлением для рассматриваемого транспортного средства 50 неизбежно переключается, если намерение водителя встречного транспортного средства 51 не оценивается, что может привести к резкому торможению рассматриваемого транспортного средства или ненужному ускорению или замедлению. Первый вариант осуществления оценивает намерение водителя встречного транспортного средства 51, чтобы определить скорость рассматриваемого транспортного средства 50, чтобы избежать внезапного торможения или ненужного ускорения или замедления.
[0032]
Далее пример способа оценки намерения водителя встречного транспортного средства 51 и пример способа определения скорости рассматриваемого транспортного средства 50 в соответствии с оцененным намерением описаны ниже со ссылкой на фиг. 3А и фиг. 3В. Способ оценки и способ определения проиллюстрированы в предположении, что местоположение P1 проезда присутствует в области R запрета проезда.
[0033]
Как показано на фиг. 3A, когда местоположение встречного транспортного средства 51 расположено за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50 (расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50), если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 является заданной скоростью или больше, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0034]
Когда местоположение встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 меньше заданной скорости, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 является ожиданием, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0035]
Как показано на фиг. 3B, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50 (расположено за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50), если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 увеличивается, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0036]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда встречное транспортное средство 51 приближается к граничной линии 62, указывающей границу между полосой движения и встречной полосой движения, блок 25 определения скорости оценивает, что намерением водителя встречного транспортного средства 51 является проезд припаркованного транспортного средства 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0037]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 не увеличивается, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 является ожиданием, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0038]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда встречное транспортное средство 51 не приближается к граничной линии 62, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 является ожиданием, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0039]
Фраза «встречное транспортное средство 51 приближается к граничной линии 62» относится к состоянию, в котором, например, местоположение встречного транспортного средства 51 в направлении ширины дороги ближе к граничной линии 62, чем местоположение при проезде линии 60 перестроения. Фраза «встречное транспортное средство 51 не приближается к граничной линии 62» относится к состоянию, в котором, например, местоположение встречного транспортного средства 51 в направлении ширины дороги то же, что и местоположение при проезде линии 60 перестроения.
[0040]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда расстояние между граничной линией 62 и встречным транспортным средством 51 является заданным расстоянием или меньше, блок 25 определения скорости оценивает, что намерением водителя встречного транспортного средства 51 является проезд припаркованного транспортного средства 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Заданное расстояние, используемое здесь, устанавливается равным расстоянию, на котором предполагается, что встречное транспортное средство 51, например, вскоре переедет граничную линию 62.
[0041]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда расстояние между граничной линией 62 и встречным транспортным средством 51 больше заданного расстояния, блок 25 определения скорости оценивает, что намерением водителя встречного транспортного средства 51 является ожиданием пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять скорость, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Когда расстояние между граничной линией 62 и встречным транспортным средством 51 не снижается ниже заданного расстояния в течение заданного времени, блок 25 определения скорости определяет заставить рассматриваемое транспортное средство 50 ускоряться. Заданное время, используемое здесь, устанавливается равным времени, необходимому, например, для оценки намерения водителя встречного транспортного средства 51.
[0042]
Блок 25 определения скорости может определить скорость рассматриваемого транспортного средства 50 на основе степени ускорения встречного транспортного средства 51. Например, когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда степень ускорения встречного транспортного средства 51 является предварительно определенной степенью ускорения или выше, блок определения скорости 25 оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Заданная степень ускорения, используемая здесь, устанавливается равной степени ускорения, с которой предполагается, что встречное транспортное средство 51, например, вскоре переедет граничную линию 62.
[0043]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда степень ускорения встречного транспортного средства 51 меньше заданной степени ускорения, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 является ожиданием, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять скорость, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Когда степень ускорения встречного транспортного средства 51 не достигает заданной степени ускорения в течение заданного времени, блок 25 определения скорости определяет заставить рассматриваемое транспортное средство 50 ускоряться.
[0044]
Фраза «местоположение встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50», используемая в первом варианте осуществления, относится к случаю, в котором встречное транспортное средство 51 находится перед линией 60 перестроения в направлении, противоположном направлению движения встречного транспортного средства 51. Фраза «местоположение встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50» может также упоминаться как состояние, в котором местоположение встречного транспортного средства 51 находится за пределами области R запрета проезда.
[0045]
Фраза «местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50», используемая в первом варианте осуществления, относится к случаю, в котором встречное транспортное средство 51 находится перед линией 60 перестроения в направлении движения встречного транспортного средства 51. Фраза «местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50» может также упоминаться как состояние, в котором местоположение встречного транспортного средства 51 находится в пределах области R запрета проезда.
[0046]
После того как скорость рассматриваемого транспортного средства 50 определена блоком 25 определения скорости, блок 26 управления транспортным средством управляет соответствующими исполнительными механизмами 30, чтобы заставить рассматриваемое транспортное средство 50 двигаться с определенной скоростью. В частности, блок 26 управления транспортным средством замедляет рассматриваемое транспортное средство 50 со степенью замедления, определенной блоком 25 определения скорости, чтобы приводить рассматриваемое транспортное средство 50 к плавной остановке на стоп-линии 61. Блок 26 управления транспортным средством также ускоряет рассматриваемое транспортное средство 50 со степенью ускорения, определенной блоком 25 определения скорости. Блок 26 управления транспортным средством в этом случае постепенно ускоряет рассматриваемое транспортное средство 50, так что местоположение Р1 проезда смещается за пределы области R запрета проезда. Устройство 1 управления транспортным средством согласно первому варианту осуществления оценивает намерение водителя встречного транспортного средства 51 и определяет скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением, чтобы избежать внезапного торможения или ненужного ускорения или замедления.
[0047]
В то время как на фиг. 3А показан пример, в котором местоположение встречного транспортного средства 51 находится за линией 30 перестроения, если смотреть из рассматриваемого транспортного средства 50, а на фиг. 3В показан пример, в котором местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, определение, находится ли местоположение встречного транспортного средства 51 за или перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, не ограничивается случаями, проиллюстрированными на фиг. 3А и фиг. 3В. Например, как показано на фиг. 3C, когда встречное транспортное средство 51 пересекает линию 60 перестроения, местоположение встречного транспортного средства 51 может быть определено как находящееся либо за линией 60 перестроения, либо перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50. В качестве альтернативы, когда середина всей длины встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, местоположение встречного транспортного средства 51 может быть определено как находящееся за линией 60 перестроения. Аналогичным образом, когда середина всей длины встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, местоположение встречного транспортного средства 51 может быть определено как находящееся перед линией 60 перестроения.
[0048]
Каждый из случаев, проиллюстрированных выше, предполагается как ситуация, в которой рассматриваемое транспортное средство 50 и встречное транспортное средство 51 не могут одновременно проехать припаркованное транспортное средство 52, или ситуация, в которой рассматриваемое транспортное средство 50 и встречное транспортное средство 51 могут одновременно проехать припаркованное транспортное средство 52, но должны избегать одновременного проезда, поскольку все еще существует вероятность столкновения между ними. Рассматриваемое транспортное средство 50 и встречное транспортное средство 51 могут безопасно одновременно проехать припаркованное транспортное средство 52 в зависимости от ширины дороги, ширины транспортного средства для припаркованного транспортного средства 52, ширины транспортного средства для рассматриваемого транспортного средства 50 и ширины транспортного средства для встречного транспортного средства 51. Условиями, позволяющими рассматриваемому транспортному средству 50 и встречному транспортному средству 51 безопасно одновременно проехать припаркованное транспортное средство 52, являются пространства, достаточные для предотвращения столкновения между встречным транспортным средством 51 и припаркованным транспортным средством 52 и столкновения между рассматриваемым транспортным средством 50 и встречным транспортным средством 51. Этот момент подробно описан ниже со ссылкой на фиг. 4. Датчик 11 определяет ширину W1, при которой встречное транспортное средство 51 может продолжать движение, избегая припаркованного транспортного средства 52, как показано на фиг. 4. Ширина W1 может быть получена таким образом, что ширина транспортного средства для встречного транспортного средства 51 добавляется к пространству, достаточному для предотвращения столкновения между встречным транспортным средством 51 и припаркованным транспортным средством 52. Затем датчик 11 определяет оставшуюся ширину W2 полосы движения, полученную таким образом, что ширина транспортного средства для припаркованного транспортного средства 52 (ширина транспортного средства, перекрывающаяся с дорогой) и ширина W1 вычитаются из общей ширины дороги. Блок 24 вычисления местоположения проезда определяет, достаточна ли оставшаяся ширина W2 полосы движения, чтобы избежать столкновения между рассматриваемым транспортным средством 50 и встречным транспортным средством 51 при проезде друг друга. Когда оставшейся ширины W2 полосы движения достаточно, чтобы избежать столкновения рассматриваемого транспортного средства 50 и встречного транспортного средства 51 при проезде друг друга, каждое из рассматриваемого транспортного средства 50 и встречного транспортного средства 51 могут замедлиться, чтобы проехать друг друга на узкой дороге.
[0049]
Объяснения выполнены выше на примере, в котором блок 21 установки линии перестроения устанавливает виртуальную линию 60 перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от припаркованного транспортном средства 52 на заданное расстояние в направлении движения рассматриваемого транспортного средства 50. Способ установки линии 60 перестроения не ограничен описанным выше случаем. Например, блок 21 установки линии перестроения может устанавливать линию 60 перестроения с использованием профиля скорости. Способ установки линии 60 перестроения с использованием профиля скорости описан ниже со ссылкой на фиг. 5. Используемый здесь термин «профиль скорости» относится к данным временного ряда скоростей.
[0050]
Как показано на фиг. 5, блок 21 установки линии перестроения устанавливает вторую стоп-линию 63 до установки линии 60 перестроения.
[0051]
Вторая стоп-линия 63 расположена в местоположении, в котором предполагается, что встречное транспортное средство 51 остановится перед припаркованным транспортным средством 52. Вторая стоп-линия 63 устанавливается в местоположении, позволяющем встречному транспортному средству 51 в состоянии остановки начать избегать и проезжать припаркованное транспортное средство 52. Встречное транспортное средство 51 должно остановиться в местоположении, удаленном от припаркованного транспортного средства 52 на некоторое расстояние, чтобы встречное транспортное средство 51 в состоянии остановки могло избежать и проехать припаркованное транспортное средство 52. Определение местоположения, удаленного от припаркованного транспортного средства 52, в котором встречное транспортное средство 51 должно остановиться, зависит, например, от ширины транспортного средства и местоположения парковки припаркованного транспортного средства 52. Вторая стоп-линия 63 предпочтительно устанавливается в местоположении, зависящем от ширины транспортного средства и положения парковки припаркованного транспортного средства 52, но может быть установлено в местоположение, имеющее заданное расстояние, достаточное для того, чтобы избежать припаркованное транспортное средство 52.
[0052]
После установки второй стоп-линии 63 блок 21 установки линии перестроения генерирует профиль V3 скорости, который приводит к остановке встречного транспортного средства 51 у второй стоп-линии 63 после начала замедления с постоянной степенью замедления от текущего местоположения встречного транспортного средства 51. Профиль V3 скорости в первом варианте осуществления устанавливается исходя из предположения, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 21 установки линии перестроения устанавливает линию 60 перестроения в местоположении P3, в котором скорость относительно профиля V3 скорости является заданной скоростью V4. Местоположение Р2, показанное на фиг. 5, представляет собой местоположение, в котором установлена вторая стоп-линия 63.
[0053]
Когда линия 60 перестроения устанавливается с использованием профиля V3 скорости, блок 25 определения скорости определяет скорость рассматриваемого транспортного средства 50 на основе профиля V3 скорости. В частности, когда местоположение встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, блок 25 определения скорости вычитает скорость, относящуюся к профилю V3 скорости, из скорости встречного транспортного средства 51, чтобы вычислить разность скоростей. Блок 25 определения скорости затем определяет скорость рассматриваемого транспортного средства 50 в соответствии с вычисленной разностью скоростей. Скорость встречного транспортного средства 51, расположенного за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, классифицируется по следующим трем случаям: скорость встречного транспортного средства 51 больше, чем скорость, относящаяся к профилю V3 скорости, скорость встречного транспортного средства 51 меньше, чем скорость, относящаяся к профилю V3 скорости, и скорость встречного транспортного средства 51 по существу такая же, как скорость, относящаяся к профилю V3 скорости. Скорость V5, показанная на фиг. 5, относится к случаю, когда скорость встречного транспортного средства 51, расположенного за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, больше, чем профиль V3 скорости. Скорость V6, показанная на фиг. 5, относится к случаю, когда скорость встречного транспортного средства 51, расположенного за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, меньше, чем профиль V3 скорости. Причина, по которой блок 25 определения скорости вычисляет разность скоростей, состоит в классификации, чтобы определить, является ли скорость встречного транспортного средства 51 больше, меньше или по существу такой же, как оцененная скорость. Намерение водителя встречного транспортного средства 51 оценивается в соответствии с результатом классификации.
[0054]
Когда вычисленная разность скоростей составляет первое заданное значение или больше, скорость встречного транспортного средства 51 определяется как превышающая оцененную скорость. Другими словами, намерение водителя встречного транспортного средства 51 оценивается как проезд припаркованного транспортного средства 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае, таким образом, определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0055]
Когда вычисленная разность скоростей меньше второго заданного значения, скорость встречного транспортного средства 51 определяется как меньшая оцененной скорости. Другими словами, намерение водителя встречного транспортного средства 51 оценивается как дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае, таким образом, определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0056]
Когда вычисленная разность скоростей меньше первого заданного значения и больше или равна второму заданному значению, скорость встречного транспортного средства 51 определяется как по существу такая же, как оцененная скорость. Другими словами, намерение водителя встречного транспортного средства 51 оценивается как дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае, таким образом, определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0057]
Описанная выше разность скоростей относится к разности, вычисленной в некоторый момент времени. Поскольку скорость транспортного средства может изменяться, сравнение разности скоростей в некоторый момент времени иногда не приводит к точному результату. Ввиду этого блок 25 определения скорости может сравнивать разность скоростей в течение заданного времени. Например, как показано на фиг. 5, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50, когда скорость встречного транспортного средства 51 постоянно больше, чем скорость, относящаяся к профилю V3 скорости (например, скорость V5), в течение заданного времени. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Когда скорость встречного транспортного средства 51 постоянно меньше скорости, относящейся к профилю V3 скорости (например, скорости V6), в течение заданного времени, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы ждать, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51.
[0058]
Блок 25 вычисления скорости может вычислять среднее значение скоростей встречного транспортного средства 51 в течение заданного времени, чтобы использовать вычисленное среднее значение для сравнения. В частности, блок 25 определения скорости вычитает скорость, относящуюся к профилю V3 скорости, из среднего значения скоростей встречного транспортного средства 51 для вычисления второй разности скоростей. Блок 25 определения скорости затем определяет скорость рассматриваемого транспортного средства 50 в соответствии с вычисленной второй разностью скоростей. Когда вычисленная вторая разность скоростей составляет третье заданное значение или больше, предполагается, что скорость встречного транспортного средства 51 больше оцененной скорости. А именно, намерение водителя встречного транспортного средства 51 оценивается как проезд припаркованного транспортного средства 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае, таким образом, определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Когда вычисленная вторая разность скоростей меньше четвертого заданного значения, предполагается, что скорость встречного транспортного средства 51 меньше оцененной скорости. А именно, намерение водителя встречного транспортного средства 51 оценивается как дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае, таким образом, определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Когда вычисленная вторая разность скоростей меньше третьего заданного значения и больше или равна четвертому заданному значению, предполагается, что скорость встречного транспортного средства 51 по существу такая же, как оцененная скорость. А именно, намерение водителя встречного транспортного средства 51 оценивается как дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае, таким образом, определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Вместо среднего значения для сравнения можно использовать медиану или моду.
[0059]
Объяснения даны выше на примере, в котором блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50, когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 увеличивается. Фраза «скорость встречного транспортного средства 51 увеличивается» в данном случае относится к состоянию, в котором скорость встречного транспортного средства 51 увеличивается больше, чем заданная скорость V4, такая как скорость V7, как, например, показано на фиг. 6.
[0060]
Пояснения также даны выше на примере, в котором блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52, когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 не увеличивается. Фраза «скорость встречного транспортного средства 51 не увеличивается» в данном случае относится к состоянию, в котором скорость встречного транспортного средства 51 является той же, что и заданная скорость V4, такая как скорость V8, как, например, показано на фиг. 6. Фраза «скорость встречного транспортного средства 51 не увеличивается» в данном случае относится к состоянию, в котором скорость встречного транспортного средства 51 уменьшается ниже скорости V4, такой как скорость V9, как, например, показано на фиг. 6.
[0061]
Профиль V3 скорости, описанный выше, генерируется блоком 21 установки линии перестроения, но не ограничивается случаем генерации. Например, модели профиля скорости, полученные из данных множества водителей, могут быть предварительно подготовлены для получения соответствующей модели профиля скорости. Термин «данные множества водителей» включает в себя данные о скорости встречного транспортного средства 51 в ситуации, например, как показано на фиг. 2. Подходящая модель профиля скорости выбирается из подготовленного множества моделей профиля скорости в зависимости от местоположения и скорости встречного транспортного средства 51.
[0062]
Другой пример установки линии 60 перестроения описан ниже со ссылкой на фиг. 7-9.
[0063]
Как показано на фиг. 7, когда перед встречным транспортным средством 51 и позади припаркованного транспортного средства 52 имеется пешеходный переход, включающий в себя стоп-линию 70, блок 21 установки линии перестроения может установить линию 60 перестроения таким образом, чтобы она накладывалась на стоп-линию 70 на пешеходном переходе. А именно, блок 21 установки линии перестроения может установить линию 60 перестроения в местоположении, соответствующем стоп-линии 70 на пешеходном переходе.
[0064]
Когда точка, в которой две или более дорог пересекаются друг с другом, находится перед встречным транспортным средством 51 и позади припаркованного транспортного средства 52, блок 21 установки линии перестроения может установить линию 60 перестроения непосредственно перед местоположением, в котором встречное транспортное средство транспортное средство 51 въезжает в точку пересечения. В частности, как показано на фиг. 8, когда перед встречным транспортным средством 51 и позади припаркованного транспортного средства 52 имеется соединение трех дорог, блок 21 установки линии перестроения может установить линию 60 перестроения непосредственно перед местоположением, в котором встречное транспортное средство 51 въезжает на соединение трех дорог. В качестве альтернативы, как показано на фиг. 9, когда перед встречным транспортным средством 51 и позади припаркованного транспортного средства 52 имеется перекресток, блок 21 установки линии перестроения может установить линию 60 перестроения непосредственно перед местоположением, в котором встречное транспортное средство 51 въезжает на перекресток. Термин «соединение трех дорог» или «перекресток» относится к местоположению, в котором две или более дорог пересекаются друг с другом. Соединение трех дорог включает Т-образное соединение и Y-образное соединение.
[0065]
Пример работы устройства 1 управления транспортным средством описан ниже со ссылкой на блок-схемы последовательности операций, показанные на фиг. 10-12. Описанный ниже процесс повторяется в заданном цикле.
[0066]
На этапе S101 контроллер 20 получает картографическую информацию из картографической базы данных 12. Процесс переходит на этап S103, и датчики определения местоположения, такие как приемник 10 GPS и одометр, обнаруживают информацию о местоположении рассматриваемого транспортного средства 50.
[0067]
Когда припаркованное транспортное средство 52 и встречное транспортное средство 51 обнаруживаются датчиком 11 (ДА на этапе S105), процесс переходит на этап S107. Когда либо припаркованное транспортное средство 52, либо встречное транспортное средство 51 не обнаружено (НЕТ на этапе S105), последовательность обработки заканчивается.
[0068]
На этапе S107, блок 21 установки линии перестроения устанавливает виртуальную линию 60 перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения рассматриваемого транспортного средства 50 (ссылка на фиг. 2). Блок 21 установки линии перестроения может устанавливать линию 60 перестроения с использованием профиля V3 скорости (ссылка на фиг. 5). Процесс переходит на этап S109, и блок 22 установки стоп-линии устанавливает виртуальную стоп-линию 61, проходящую в направлении ширины полосы движения, в полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения встречного транспортного средства 51 (ссылка на фиг. 2).
[0069]
Процесс переходит на этап S111, и блок 23 установки области запрета проезда устанавливает область R запрета проезда с использованием линии 60 перестроения и стоп-линии 61, установленных на этапах S107 и S109 (ссылка на фиг. 2). Процесс переходит на этап S113, и блок 24 вычисления местоположения проезда определяет, присутствует ли местоположение P1, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга, в области R запрета проезда, установленной на этапе S111.
[0070]
Когда местоположение P1, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга, находится в области R запрета проезда (ДА на этапе S115), процесс переходит на этап S117. Когда местоположение P1, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга, не находится в области R запрета проезда (НЕТ на этапе S115), процесс переходит на этап S123.
[0071]
На этапе S117 датчик 11 определяет ширину W1, в пределах которой встречное транспортное средство 51 может продолжать движение, избегая припаркованного транспортного средства 52 (ссылка на фиг. 4). Затем датчик 11 определяет оставшуюся ширину полосы W2 движения, полученную таким образом, что ширина припаркованного транспортного средства 52 и ширина W1 вычитаются из общей ширины дороги (ссылка на фиг. 4). Процесс переходит на этап S119, и блок 24 вычисления местоположения проезда определяет, является ли оставшаяся ширина W2 полосы движения, определенная на этапе S117, достаточной для предотвращения столкновения между рассматриваемым транспортным средством 50 и встречным транспортным средством 51 при проезде друг друга (на этапе S119). Когда результатом определения является ДА на этапе S119, процесс переходит на этап S121, и рассматриваемое транспортное средство 50 заставляют продолжать движение, чтобы проехать встречное транспортное средство 51 на узкой дороге. Когда рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проехали друг друга (ДА на этапе S123), последовательность обработки заканчивается. Когда результатом определения является НЕТ на этапе S119, процесс переходит на этап S125.
[0072]
Когда местоположение встречного транспортного средства 51 находится за линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50 (ДА на этапе S125) (ссылка на фиг. 3A), процесс переходит на этап S127. На этапе S127 блок 25 определения скорости вычитает скорость, относящуюся к профилю V3 скорости, из скорости встречного транспортного средства 51 для вычисления разности скоростей. Блок 25 определения скорости классифицирует, чтобы определить, является ли скорость встречного транспортного средства 51 больше, меньше или по существу такой же, как оцененная скорость в соответствии с разностью скоростей. Когда скорость встречного транспортного средства 51 превышает скорость, относящуюся к профилю V3 скорости (ДА на этапе S129), процесс переходит на этап S131, и блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Затем, блок 25 определения скорости определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Блок 26 управления транспортным средством замедляет рассматриваемое транспортное средство 50 с помощью исполнительного механизма тормоза со степенью замедления, определенной блоком 25 определения скорости. Затем процесс переходит на этап S139.
[0073]
Когда скорость встречного транспортного средства 51 не превышает скорость, относящуюся к профилю V3 скорости (НЕТ на этапе S129), процесс переходит на этап S133. Когда скорость встречного транспортного средства 51 меньше скорости, относящейся к профилю V3 скорости (ДА на этапе S133), процесс переходит на этап S135, и блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 заключается в ожидании, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Затем блок 25 определения скорости определяет, заставить рассматриваемое транспортное средство 50 ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Блок 26 управления транспортным средством ускоряет рассматриваемое транспортное средство 50 с помощью исполнительного механизма ускорения. Затем процесс переходит на этап S139. Обработка на этапе S139 та же, что и обработка на этапе S123, и дублирующиеся пояснения ниже не повторяются.
[0074]
Когда скорость встречного транспортного средства 51 такая же или по существу такая же, как скорость, относящаяся к профилю V3 скорости (НЕТ на этапе S133), процесс переходит на этап S137, и блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Затем блок 25 определения скорости определяет, заставить рассматриваемое транспортное средство 50 сохранять скорость, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Затем процесс переходит на этап S141. Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50 (НЕТ на этапе S125) (ссылка на фиг. 3B), процесс переходит на этап S141. Процесс может перейти на этап S139 после обработки на этапе S137.
[0075]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 увеличивается (ДА на этапе S141), процесс переходит на этап S143, и блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Затем блок 25 определения скорости определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50. Блок 26 управления транспортным средством замедляет рассматриваемое транспортное средство 50 с помощью исполнительного механизма тормоза со степенью замедления, определенной блоком 25 определения скорости. Затем процесс переходит на этап S151.
[0076]
Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 не увеличивается (НЕТ на этапе S141), процесс переходит на этап S145. Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда встречное транспортное средство 51 приближается к граничной линии 62, указывающей границу между полосой движения и встречной полосой движения (ДА на этапе S145), процесс переходит на этап S143. Когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения, если смотреть из рассматриваемого транспортного средства 50, и когда встречное транспортное средство 51 не приближается к граничной линии 62 (НЕТ на этапе S145), блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 является ожиданием, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. По прошествии заданного периода времени (ДА на этапе S147) блок 25 определения скорости затем определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51 (на этапе S149). Причина выполнения обработки на этапе S147 заключается в том, чтобы подтвердить, что оцененное намерение водителя встречного транспортного средства 51 не изменилось. После обработки на этапе S149 процесс переходит на этап S151. Обработка на этапе S151 та же, что и обработка на этапе S123, и дублирующиеся пояснения ниже не повторяются.
[0077]
<Эффекты функционирования>
Как описано выше, устройство 1 управления транспортным средством согласно первому варианту осуществления может обеспечивать следующие эффекты функционирования.
[0078]
Блок 21 установки линии перестроения устанавливает виртуальную линию 60 перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения рассматриваемого транспортного средства 50. Блок 22 установки стоп-линии устанавливает виртуальную стоп-линию 61 в полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние в направлении движения встречного транспортного средства 51. Блок 23 установки области запрета проезда устанавливает область R запрета проезда, включающую в себя линию 60 перестроения и стоп-линию 61 на дороге. Блок 24 вычисления местоположения проезда вычисляет местоположение P1, в котором рассматриваемое транспортное средство 50 и встречное транспортное средство 51 проезжают друг друга, в соответствии со скоростью рассматриваемого транспортного средства 50 и местоположением и скоростью встречного транспортного средства 51. В случае, когда местоположение P1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 является заданной скоростью или выше, или когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 увеличивается, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0079]
В случае, когда местоположение P1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 меньше, чем заданная скорость, или когда местоположение встречного транспортного средства 51 находится перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 не увеличивается, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Блок 26 управления транспортным средством управляет соответствующими исполнительными механизмами 30, чтобы приводить рассматриваемое транспортное средство 50 к движению с определенной скоростью. Устройство 1 управления транспортным средством согласно первому варианту осуществления, как описано выше, оценивает намерение водителя встречного транспортного средства 51 и определяет скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением, чтобы избежать внезапного торможения или ненужного ускорения или замедления.
[0080]
Когда местоположение встречного транспортного средства 51 находится за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 является заданной скоростью или выше, или когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и скорость встречного транспортного средства 51 увеличивается, блок 26 управления транспортным средством заставляет рассматриваемое транспортное средство 50 замедляться, чтобы остановиться на стоп-линии 61. Это управление может предотвратить проезд встречным транспортным средством 51 припаркованного транспортного средства 52, чтобы обеспечить плавное движение.
[0081]
Блок 21 установки линии перестроения может устанавливать линию 60 перестроения на основе местоположения, в котором встречное транспортное средство 51 может остановиться. Местоположение, в котором встречное транспортное средство 51 может остановиться, представляет собой стоп-линию 70 на пешеходном переходе (фактическая стоп-линия), как показано, например, на фиг. 7. Альтернативно, местоположение, в котором встречное транспортное средство 51 может остановиться, устанавливается непосредственно перед местоположением, в котором встречное транспортное средство 51 въезжает в место, в котором две или более дорог пересекаются друг с другом, как показано, например, на фиг. 8 или фиг. 9. Установка линии 60 перестроения, как описано выше, может выполнять управление движением рассматриваемого транспортного средства 50 в зависимости от намерения водителя встречного транспортного средства 51, которое состоит в том, чтобы замедлиться к линии 60 перестроения, проехать через линию 60 перестроения или остановиться на линии 60 перестроения.
[0082]
Блок 21 установки линии перестроения может устанавливать линию 60 перестроения в соответствии с профилем скорости. При установке линии 60 перестроения с использованием профиля скорости блок 21 установки линии перестроения устанавливает виртуальную вторую стоп-линию 63 на встречной полосе движения в местоположении, удаленном от припаркованного транспортного средства 52 на заданное расстояние (второе заданное расстояние) в направлении движения рассматриваемого транспортного средства 50. Блок 21 установки линии перестроения получает или генерирует профиль V3 скорости, который приводит к остановке встречного транспортного средства 51 на второй стоп-линии 63, используя местоположение и скорость встречного транспортного средства 51. Блок 21 установки линии перестроения затем устанавливает линию 60 перестроения в местоположении, в котором скорость, относящаяся к профилю V3 скорости, соответствует заданной скорости V4 (второй заданной скорости). Блок 25 определения скорости оценивает намерение водителя встречного транспортного средства 51 посредством использования линии 60 перестроения и определяет скорость рассматриваемого транспортного средства 50 с учетом оцененного намерения. Эта конфигурация позволяет управлять рассматриваемым транспортным средством 50 в соответствии с намерением водителя встречного транспортного средства 51.
[0083]
Блок 25 определения скорости вычитает скорость, относящуюся к профилю V3 скорости, из скорости встречного транспортного средства 51, чтобы вычислить разность скоростей для классификации, чтобы определить, является ли скорость встречного транспортного средства 51 больше, меньше или по существу такой же, как оцененная скорость, в соответствии с вычисленной разностью скоростей. Эта конфигурация позволяет управлять рассматриваемым транспортным средством 50 в соответствии с намерением водителя встречного транспортного средства 51, чтобы избежать резкого торможения или ненужного ускорения или замедления, соответственно.
[0084]
Блок 25 определения скорости может оценить намерение водителя встречного транспортного средства 51 в соответствии с взаимным расположением между встречным транспортным средством 51 и граничной линией 62, указывающей границу между полосой движения и встречной полосой движения, или в соответствии с ускорение встречного транспортного средства 51. Эта конфигурация позволяет управлять рассматриваемым транспортным средством 50 в соответствии с намерением водителя встречного транспортного средства 51, чтобы избежать резкого торможения или ненужного ускорения или замедления, соответственно.
[0085]
<Модифицированный пример>
Первый вариант осуществления показан выше в случае использования скорости и степени ускорения встречного транспортного средства 51 при определении скорости рассматриваемого транспортного средства 50, но не ограничен этим случаем. Например, блок 25 определения скорости может определить скорость рассматриваемого транспортного средства 50 только с использованием степени ускорения встречного транспортного средства 51. В частности, в случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 увеличивается, блок 25 определения скорости может оценивать, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае может определять степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0086]
В случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 не увеличивается, блок 25 определения скорости может оценивать, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае может определять, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Устройство 1 управления транспортным средством в соответствии с модифицированным примером, как описано выше, оценивает намерение водителя встречного транспортного средства 51 только посредством использования степени ускорения встречного транспортного средства 51, чтобы определить скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением. Это позволяет избежать резкого торможения или ненужного ускорения или замедления.
[0087]
Второй вариант осуществления
Второй вариант осуществления настоящего изобретения описан ниже со ссылкой на фиг. 13-16. Одни и те же элементы, описанные в первом варианте осуществления, обозначены теми же ссылочными позициями, и дублирующиеся пояснения ниже не приводятся. Следующие пояснения в основном касаются других моментов. Второй вариант осуществления проиллюстрирован случаем, в котором предполагается, что местоположение P1 проезда находится в области R запрета проезда.
[0088]
Как показано на фиг. 13, устройство 2 управления транспортным средством согласно второму варианту осуществления дополнительно включает в себя блок 27 установки порогового значения скорости и блок 28 сравнения скоростей. Устройство 2 управления транспортным средством отличается от устройства 1 управления транспортным средством согласно первому варианту осуществления тем, что не включает в себя блок 21 установки линии перестроения или блок 22 установки стоп-линии.
[0089]
Блок 27 установки порогового значения скорости устанавливает пороговое значение скорости, используемое в блоке 28 сравнения скоростей. В частности, как показано на фиг. 14, блок 27 установки порогового значения скорости генерирует профиль скорости, который приводит к остановке встречного транспортного средства 51 перед припаркованным транспортным средством 52 после начала замедления с постоянной степенью замедления из некоторого местоположения (которое может быть текущим местоположением) встречного транспортного средства 51. Скорость, относящаяся к профилю скорости, генерируемому блоком 27 установки порогового значения скорости, тем больше, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51.
[0090]
Блок 27 установки порогового значения скорости устанавливает пороговое значение скорости на основе сгенерированного профиля скорости. В частности, как показано на фиг. 15, блок 27 установки порогового значения скорости устанавливает скорость, относящуюся к профилю скорости, в качестве порогового значения скорости, соответствующего местоположению встречного транспортного средства 51, удаленному от припаркованного транспортного средства 52 на заданное расстояние (расстояние L3). Установленное пороговое значение скорости в примере, показанном на фиг. 15, является V10. Фиг. 16 иллюстрирует другой пример, в котором блок 27 установки порогового значения скорости устанавливает скорость, относящуюся к профилю скорости, в качестве порогового значения скорости, соответствующего местоположению встречного транспортного средства 51, удаленному от припаркованного транспортного средства 52 на заданное расстояние (расстояние L4). Установленное пороговое значение скорости в примере, показанном на фиг. 16, является V11. Описанные выше примеры удовлетворяют соотношениям L3˃L4 и V10˃V11. Таким образом, пороговое значение скорости тем выше, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51.
[0091]
Блок 28 сравнения скоростей сравнивает пороговое значение скорости, установленное блоком 27 установки порогового значения скорости, со скоростью встречного транспортного средства 51. В примере, проиллюстрированном на фиг. 15, в случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, блок 28 сравнения скоростей сравнивает пороговое значение V10 скорости, соответствующее местоположению встречного транспортного средства 51, удаленному от припаркованного транспортного средства 52 на расстояние L3, со скоростью встречного транспортного средства 51, соответствующей местоположению встречного транспортного средства 51, удаленному от припаркованного транспортного средства 52 на расстояние L3. Блок 28 сравнения скоростей выводит результат сравнения в блок 25 определения скорости.
[0092]
Когда скорость встречного транспортного средства 51 составляет пороговое значение V10 скорости или больше, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае определяет степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0093]
Когда скорость встречного транспортного средства 51 меньше порогового значения V10 скорости, блок 25 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы ждать, когда рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае определяет, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Устройство 2 управления транспортным средством согласно второму варианту осуществления, как описано выше, оценивает намерение водителя встречного транспортного средства 51 и определяет скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением, чтобы избежать внезапного торможения или ненужного ускорения или замедления.
[0094]
Во втором варианте осуществления блок 23 установки области запрета проезда устанавливает область R запрета проезда без использования линии 60 перестроения или стоп-линии 61. Например, блок 23 установки области запрета проезда может установить область R запрета проезда на дороге, заданную в заданной области в направлении продолжения дороги, включающей в себя припаркованное транспортное средство 52 (ссылка на фиг. 14).
[0095]
<Модифицированный пример 1>
Модифицированный пример 1 согласно второму варианту осуществления описан ниже. Устройство 2 управления транспортным средством проиллюстрировано выше без блока 21 установки линии перестроения, но не ограничено этим случаем. Устройство 2 управления транспортным средством может включать в себя блок 21 установки линии перестроения.
[0096]
Когда устройство 2 управления транспортным средством включает в себя блок 21 установки линии перестроения, блок 28 сравнения скоростей может сравнивать пороговое значение скорости со скоростью встречного транспортного средства 51 посредством использования линии 60 перестроения. В частности, блок 28 сравнения скоростей сравнивает пороговое значение скорости со скоростью встречного транспортного средства 51, когда местоположение встречного транспортного средства 51 находится за линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50. Способ определения скорости в соответствии с результатом сравнения такой же, как описано выше, и дублирующиеся пояснения далее не повторяются. Устройство 2 управления транспортным средством согласно модифицированному примеру 1, как описано выше, оценивает намерение водителя встречного транспортного средства 51 и определяет скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением, чтобы избежать внезапного торможения или ненужного ускорения или замедления.
[0097]
<Модифицированный пример 2>
Модифицированный пример 2 согласно второму варианту осуществления описан ниже. Устройство 2 управления транспортным средством согласно модифицированному примеру 2 также включает в себя блок 21 установки линии перестроения. Устройство 2 управления транспортным средством согласно модифицированному примеру 2 имеет функции, аналогичные функциям устройства 2 управления транспортным средством согласно модифицированному примеру 1. Устройство 2 управления транспортным средством согласно модифицированному примеру 2 оценивает намерение водителя встречного транспортного средства 51, используя степень ускорения встречного транспортного средства 51 в дополнение к скорости встречного транспортного средства 51.
[0098]
В частности, в случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 увеличивается, блок 25 определения скорости может оценивать, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае может определять степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0099]
В случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 не увеличивается, блок 25 определения скорости может оценивать, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае может определять, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Устройство 2 управления транспортным средством в соответствии с модифицированным примером 2, как описано выше, оценивает намерение водителя встречного транспортного средства 51, чтобы определить скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением. Это позволяет избежать резкого торможения или ненужного ускорения или замедления, соответственно.
[0100]
<Модифицированный пример 3>
Модифицированный пример 3 согласно второму варианту осуществления описан ниже. Устройство 2 управления транспортным средством согласно модифицированному примеру 3 также включает в себя блок 21 установки линии перестроения. Устройство 2 управления транспортным средством согласно модифицированному примеру 3 имеет функции, аналогичные функциям устройства 2 управления транспортным средством согласно модифицированному примеру 1. Устройство 2 управления транспортным средством в соответствии с модифицированным примером 3 оценивает намерение водителя встречного транспортного средства 51 посредством использования скорости и степени ускорения встречного транспортного средства 51 с передней стороны линии 60 перестроения.
[0101]
В частности, в случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, и когда скорость встречного транспортного средства 51 является пороговым значением скоростью или выше, или скорость встречного транспортного средства 51 увеличивается, блок 25 определения скорости может оценить, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать припаркованное транспортное средство 52, не дожидаясь рассматриваемого транспортного средства 50. Блок 25 определения скорости в этом случае может определять степень замедления рассматриваемого транспортного средства 50, чтобы плавно остановиться на стоп-линии 61, чтобы избежать столкновения между встречным транспортным средством 51 и рассматриваемым транспортным средством 50.
[0102]
В случае, когда местоположение Р1 проезда присутствует в области R запрета проезда, когда местоположение встречного транспортного средства 51 расположено перед линией 60 перестроения в направлении движения рассматриваемого транспортного средства 50, если смотреть из рассматриваемого транспортного средства 50, когда скорость встречного транспортного средства 51 меньше порогового значения скорости, и когда скорость встречного транспортного средства 51 не увеличивается, блок 25 определения скорости может оценить, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, пока рассматриваемое транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 25 определения скорости в этом случае может определять, заставить рассматриваемое транспортное средство 50 сохранять текущую скорость или ускоряться, чтобы приводить рассматриваемое транспортное средство 50 к проезду припаркованного транспортного средства 52 до встречного транспортного средства 51. Устройство 2 управления транспортным средством в соответствии с модифицированным примером 3, как описано выше, оценивает намерение водителя встречного транспортного средства 51, чтобы определить скорость рассматриваемого транспортного средства 50 в соответствии с оцененным намерением. Это позволяет избежать резкого торможения или ненужного ускорения или замедления, соответственно.
[0103]
Соответствующие функции, описанные выше в соответствующих вариантах осуществления, могут быть реализованы в одной или множестве схем обработки. Соответствующие схемы обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Соответствующие схемы обработки включают в себя специализированную интегральную схему (ASIC), сконфигурированную для выполнения функций, описанных выше, и устройство, такое как компонент схемы. Описанные выше устройства управления транспортным средством могут улучшить работу компьютера.
[0104]
Хотя настоящее изобретение было описано выше со ссылкой на соответствующие варианты осуществления, следует понимать, что настоящее изобретение не предназначено для ограничения описаниями и чертежами, составляющими часть этого раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники согласно данному раскрытию.
[0105]
Например, соответствующие варианты осуществления проиллюстрированы выше для случая прямой дороги, но могут также применяться для случая изогнутой дороги.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0106]
1, 2 УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
10 ПРИЕМНИК GPS
11 ДАТЧИК
12 КАРТОГРАФИЧЕСКАЯ БАЗА ДАННЫХ
20 КОНТРОЛЛЕР
21 БЛОК УСТАНОВКИ ЛИНИИ ПЕРЕСТРОЕНИЯ
22 БЛОК УСТАНОВКИ СТОП-ЛИНИИ
23 БЛОК УТАНОВКИ ОБЛАСТИ ЗАПРЕТА ПРОЕЗДА
24 БЛОК ВЫЧИСЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОЕЗДА
25 БЛОК ОПРЕДЕЛЕНИЯ СКОРОСТИ
26 БЛОК УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
27 БЛОК УСТАНОВКИ ПОРОГОВОГО ЗНАЧЕНИЯ СКОРОСТИ
28 БЛОК СРАВНЕНИЯ СКОРОСТЕЙ
30 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ.
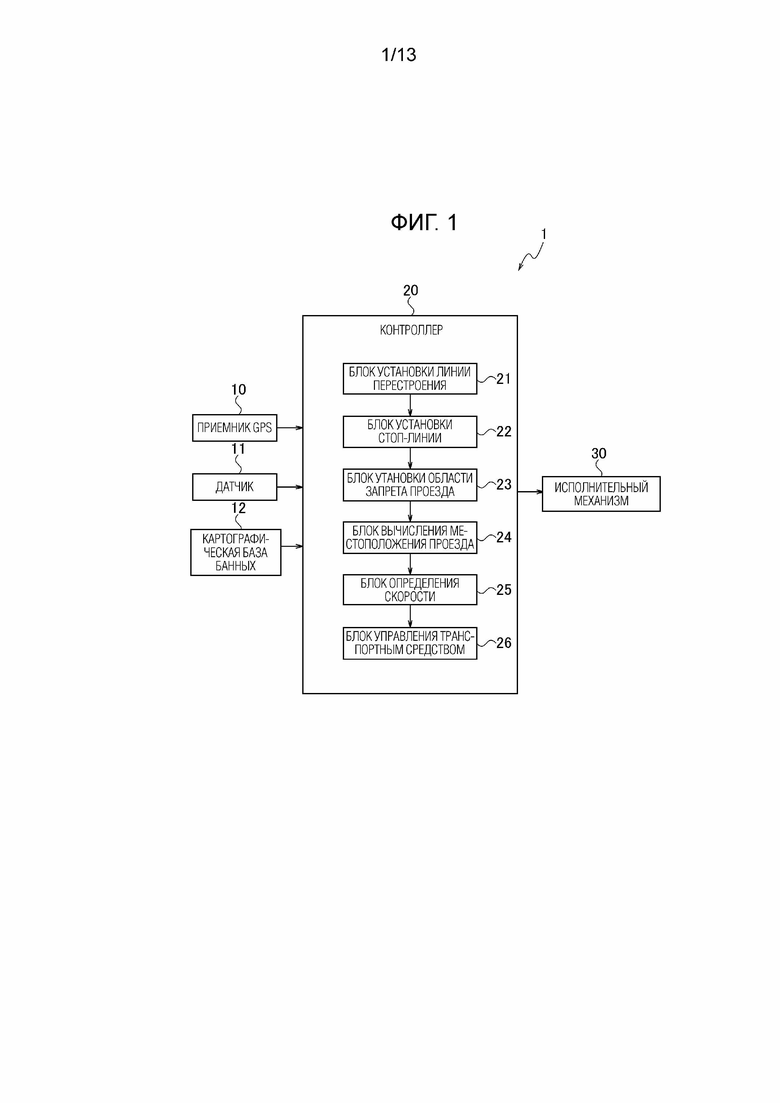
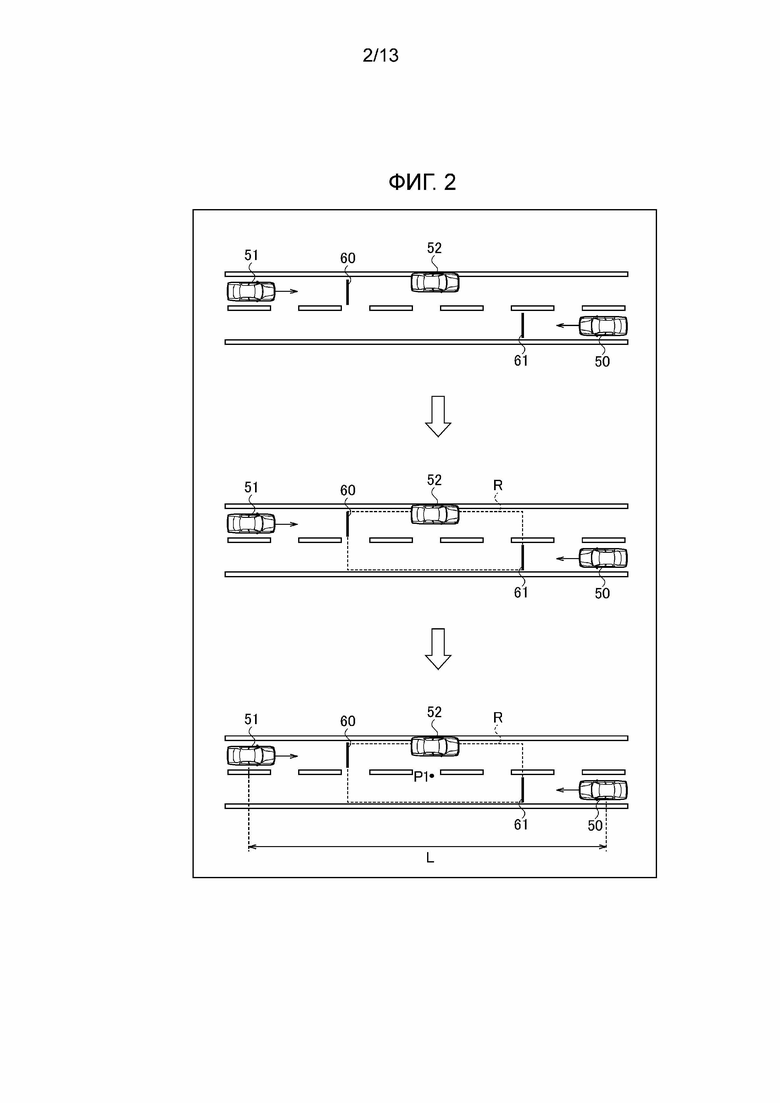
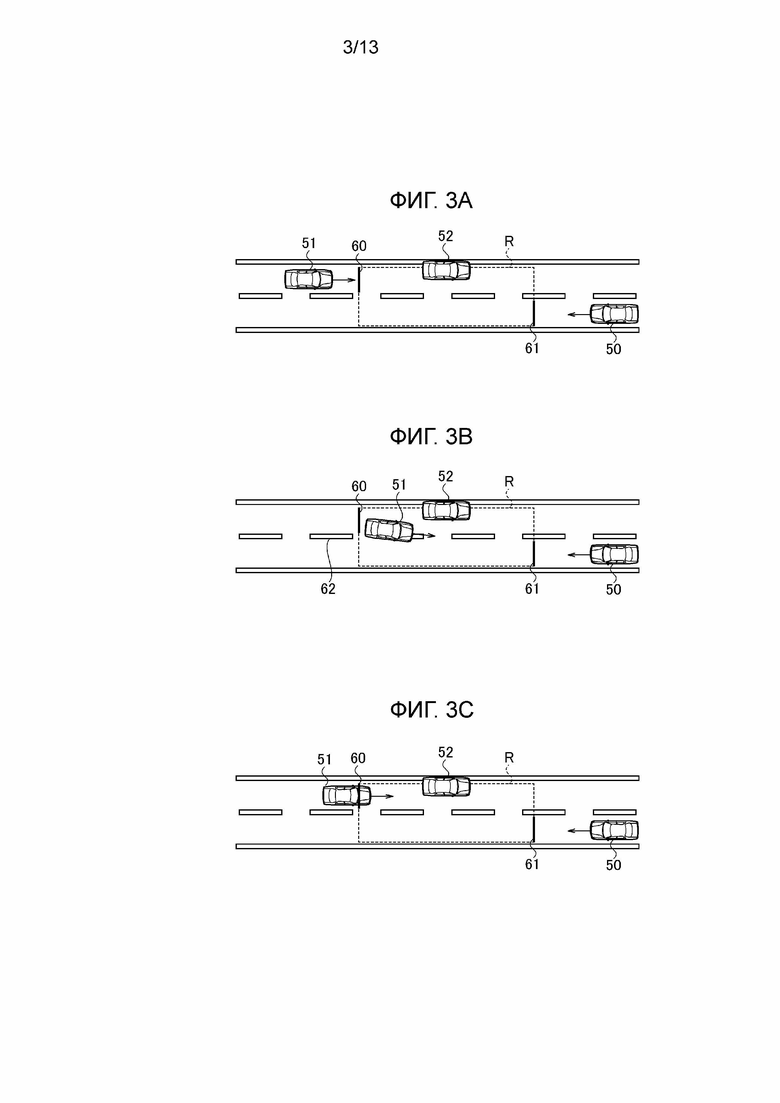
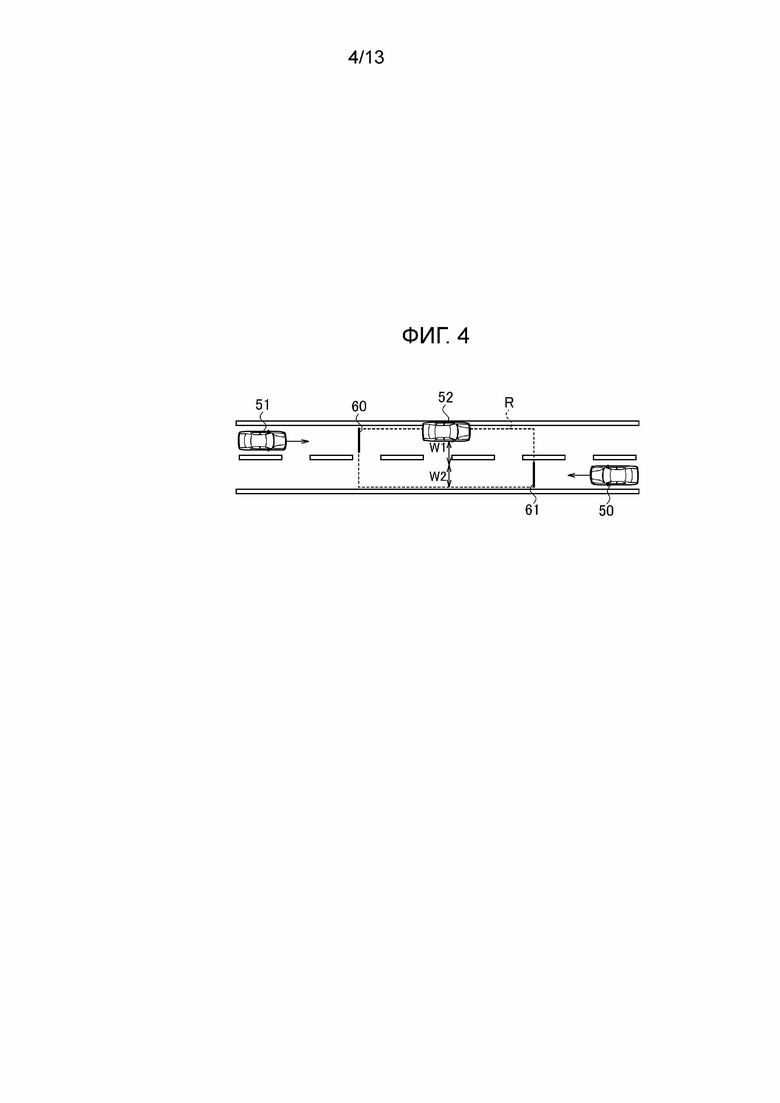
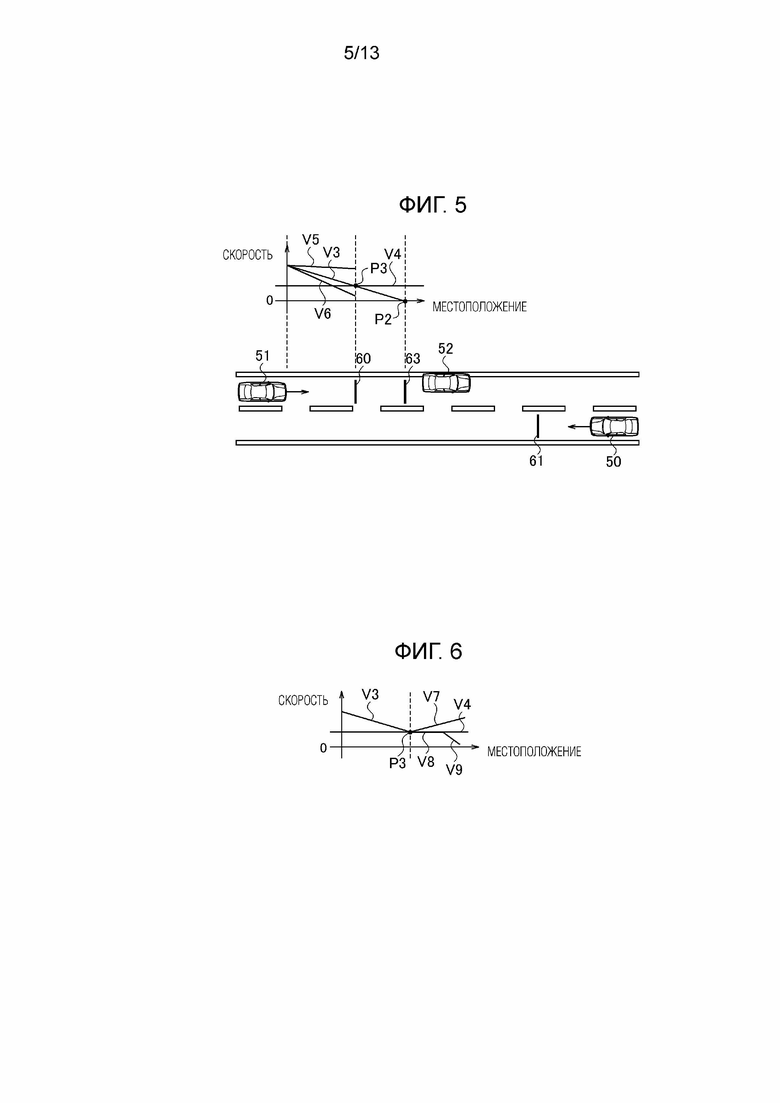
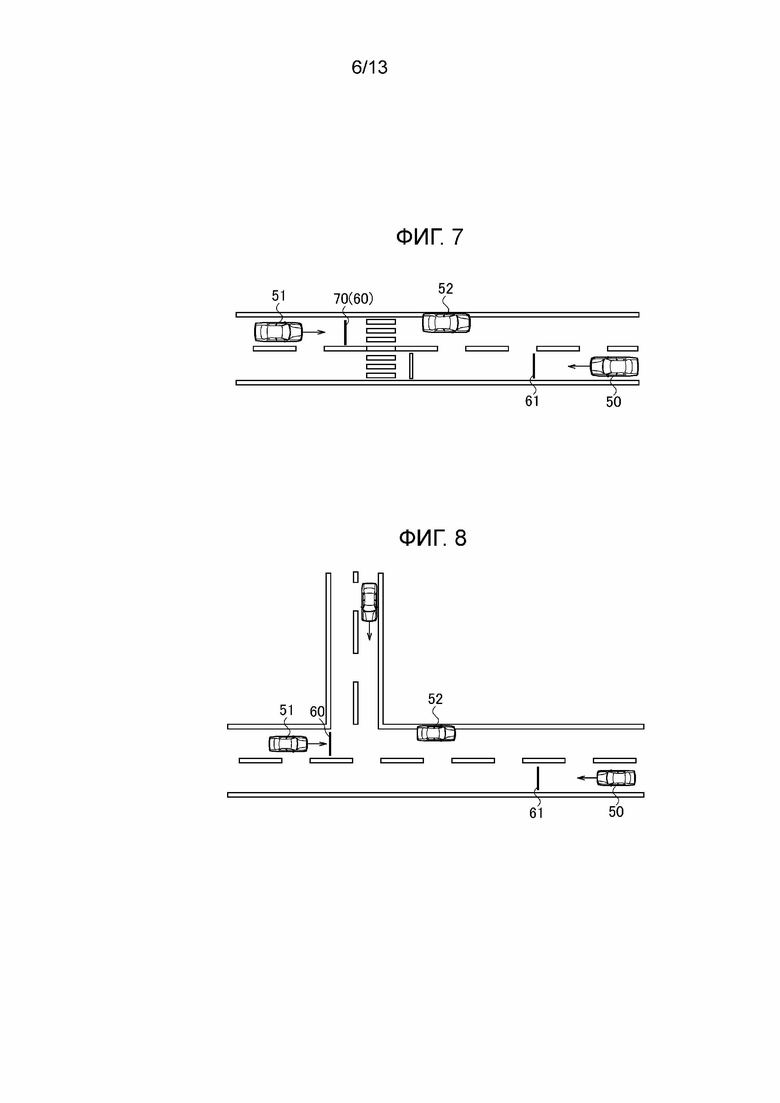
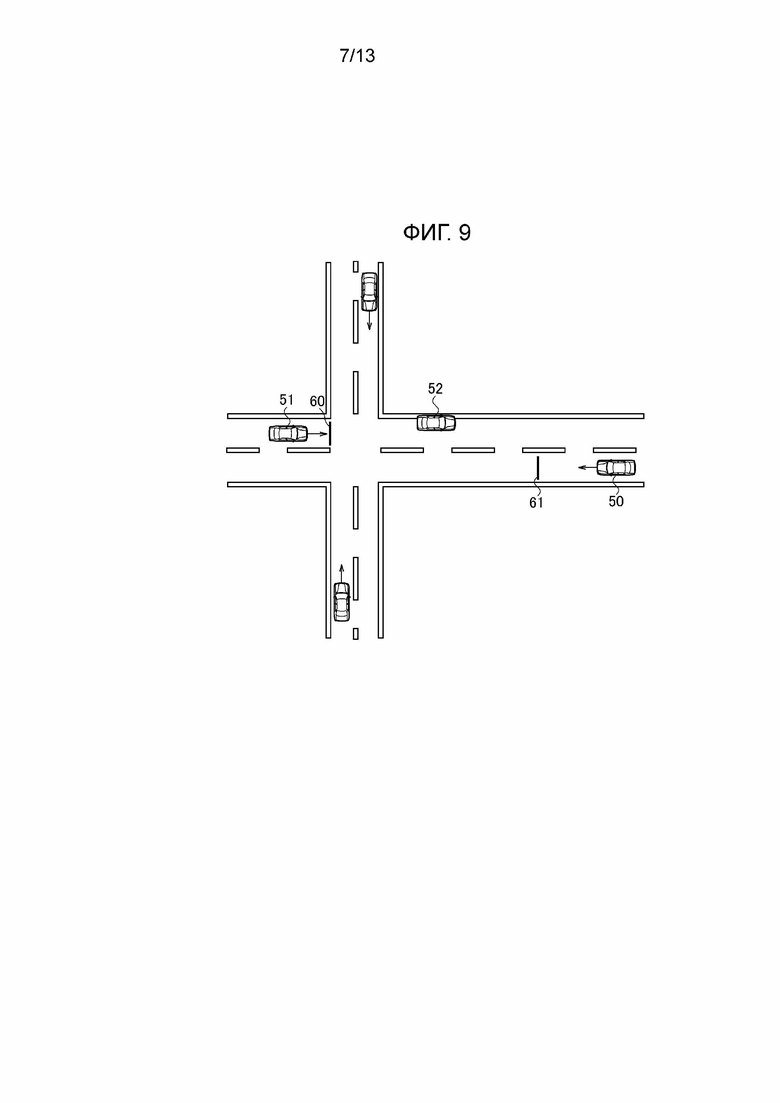
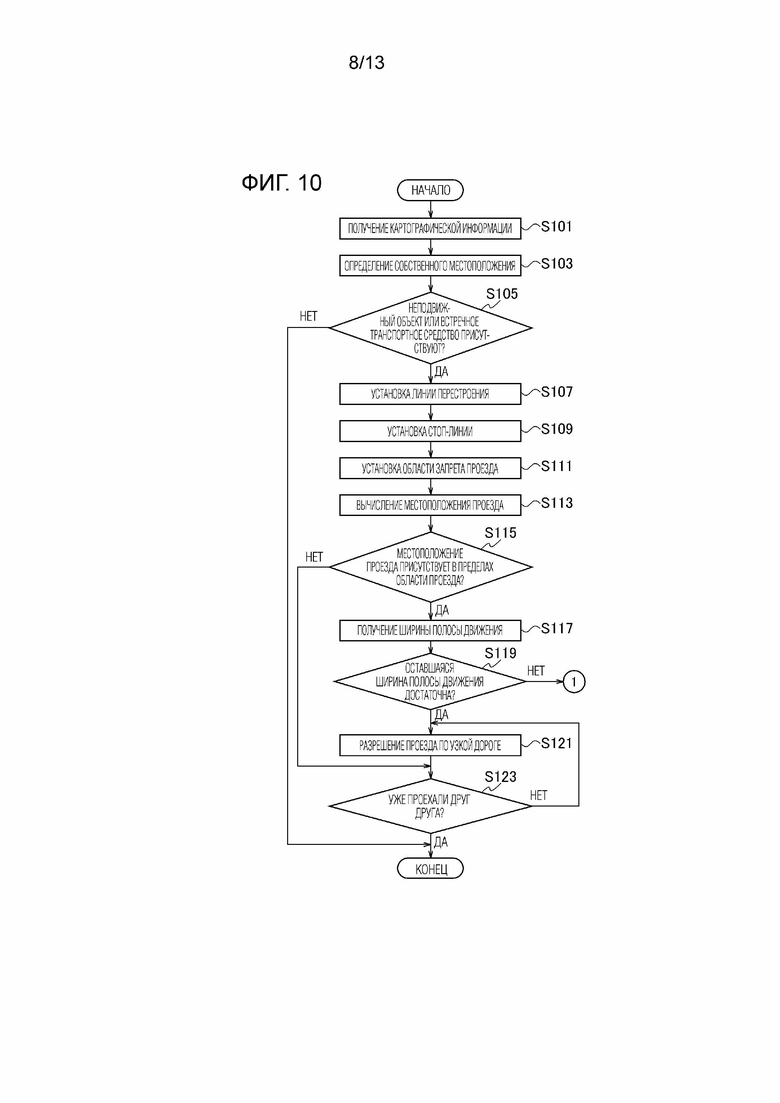
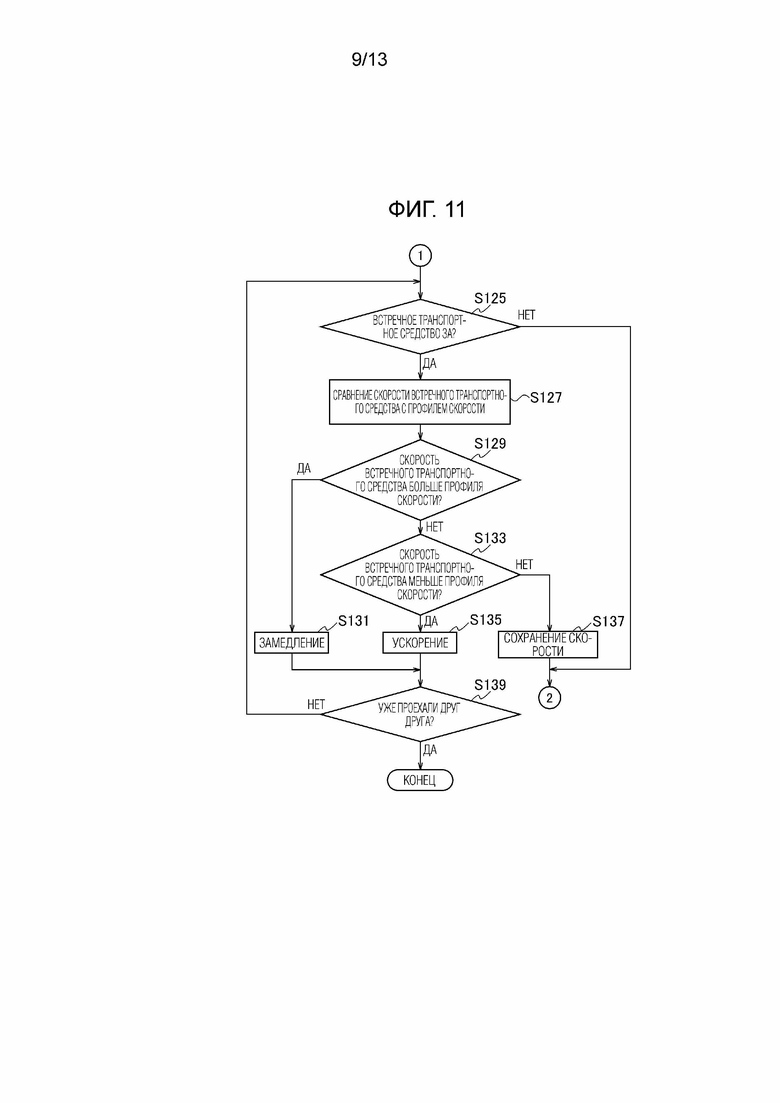
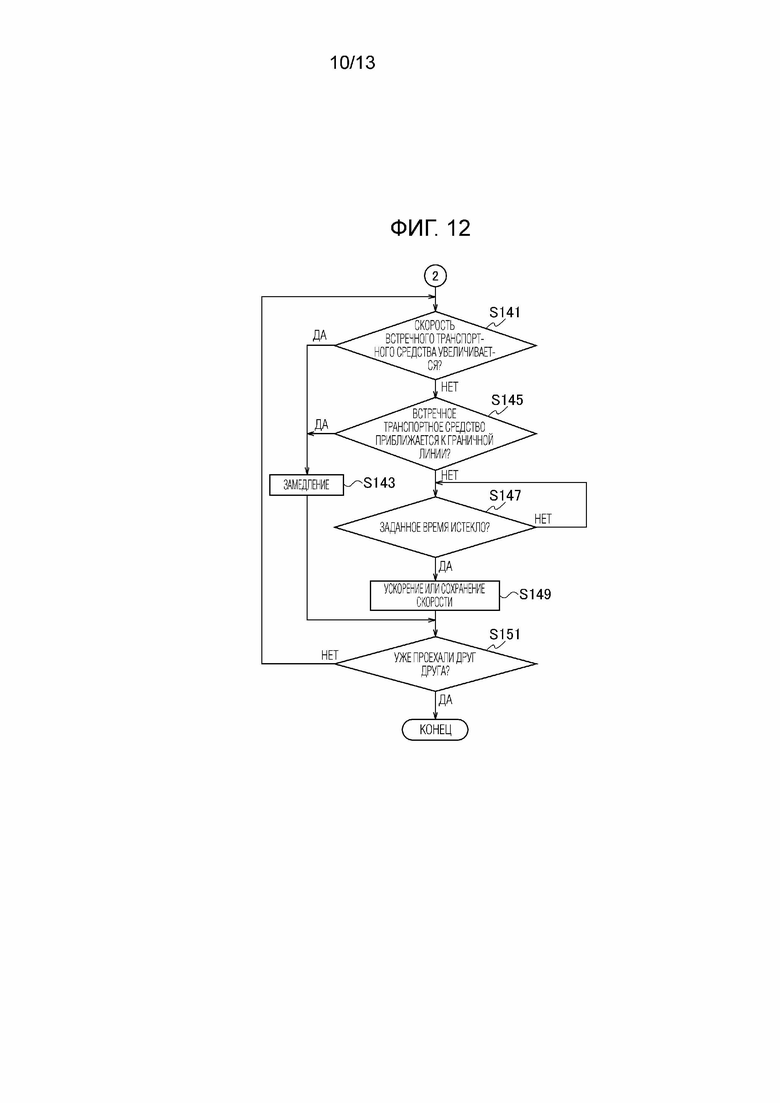
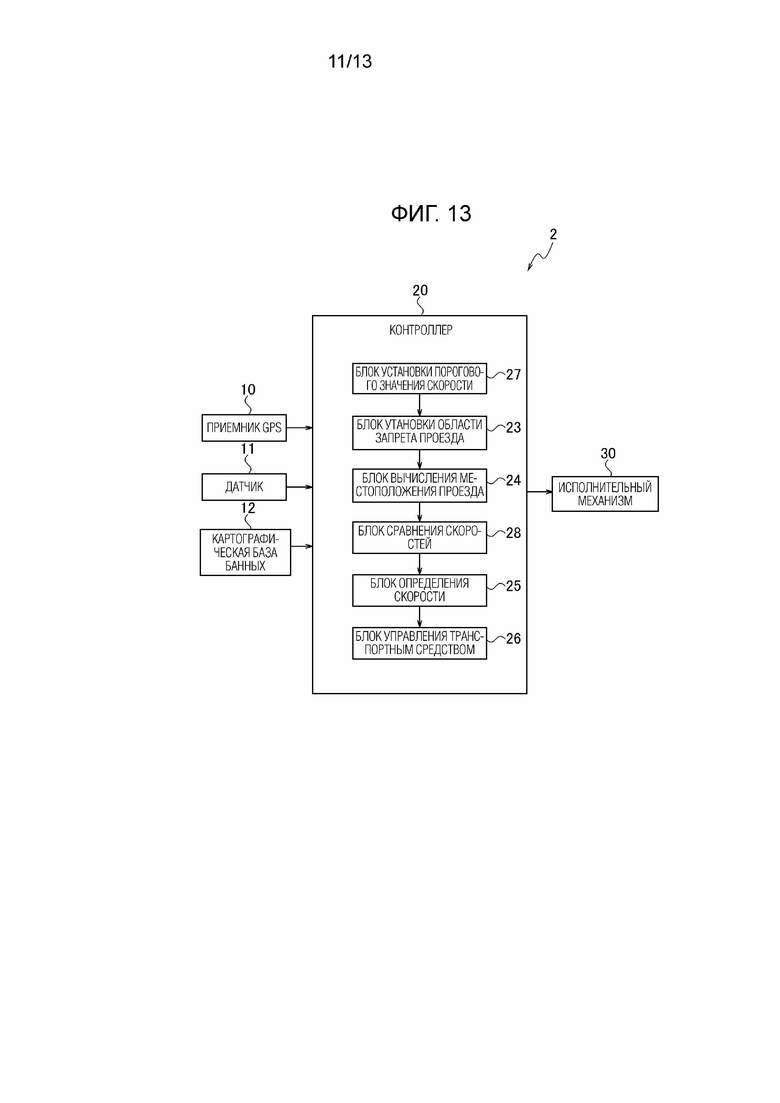
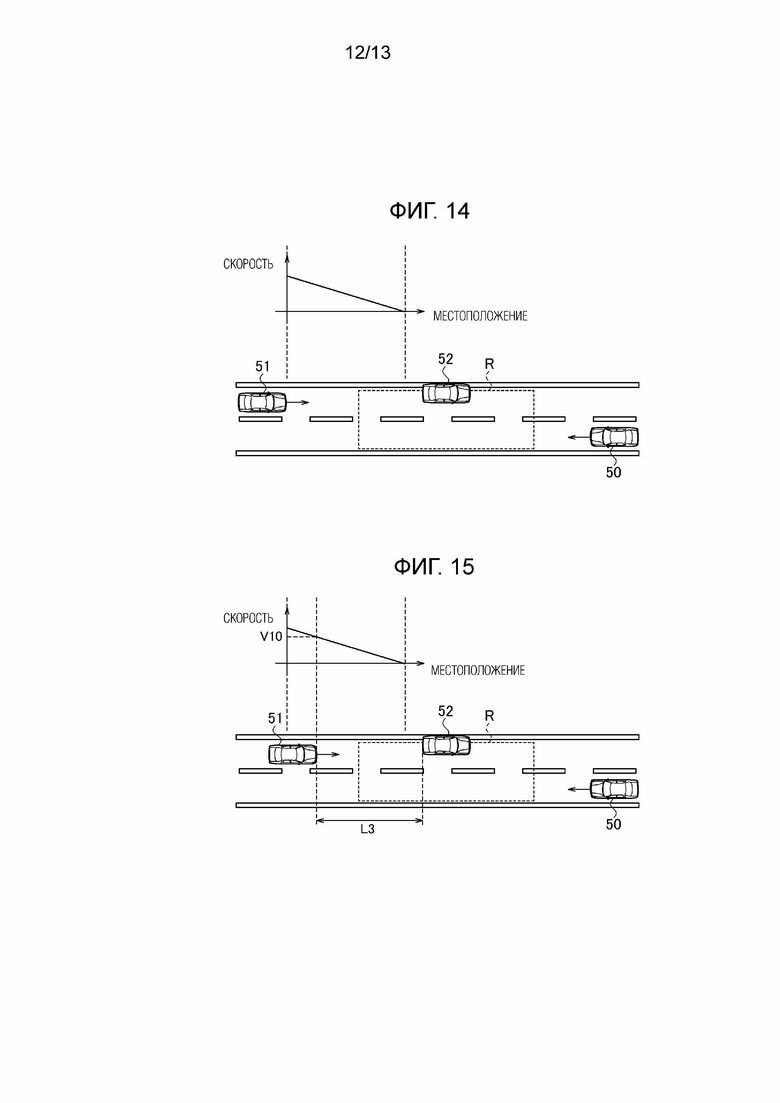
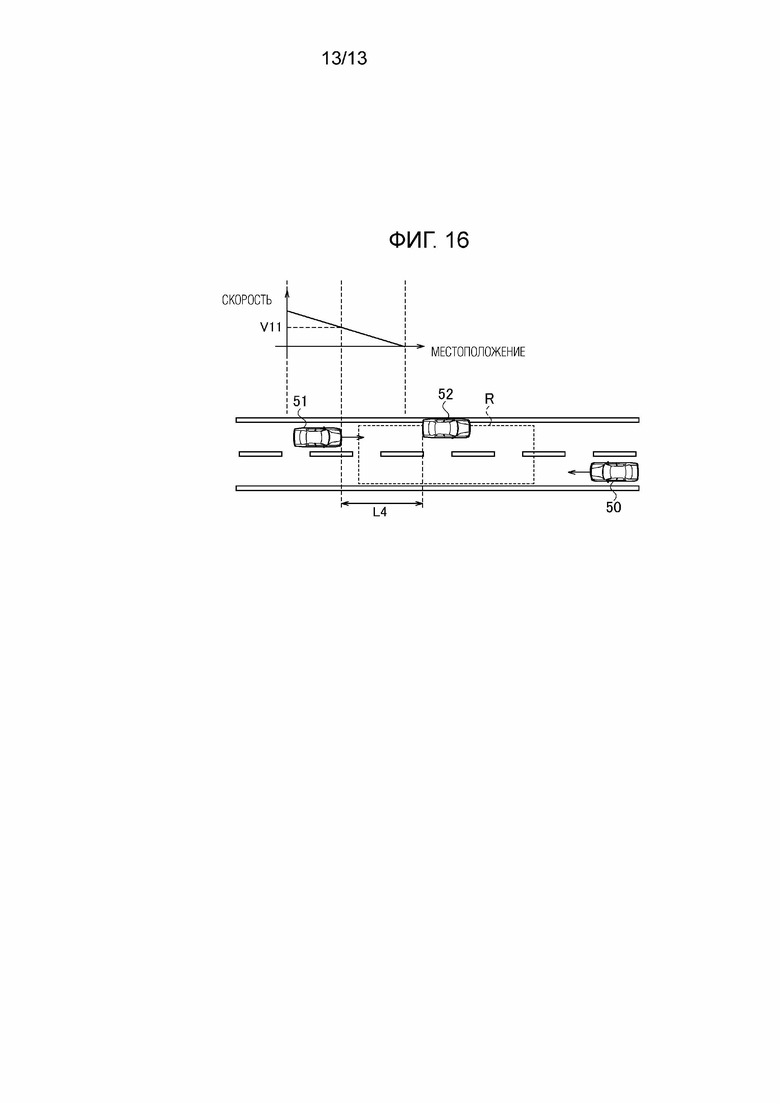
Изобретение относится к способу управления транспортным средством и устройству управления транспортным средством. Устройство управления транспортным средством включает в себя датчик и контроллер. Контроллер заставляет рассматриваемое транспортное средство замедляться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, больше или равна пороговому значению скорости, соответствующему местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах заданной области, и заставляет рассматриваемое транспортное средство сохранять скорость или ускоряться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, меньше порогового значения скорости, соответствующего местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах области. Достигается повышение безопасности. 3 н. и 15 з.п. ф-лы, 18 ил.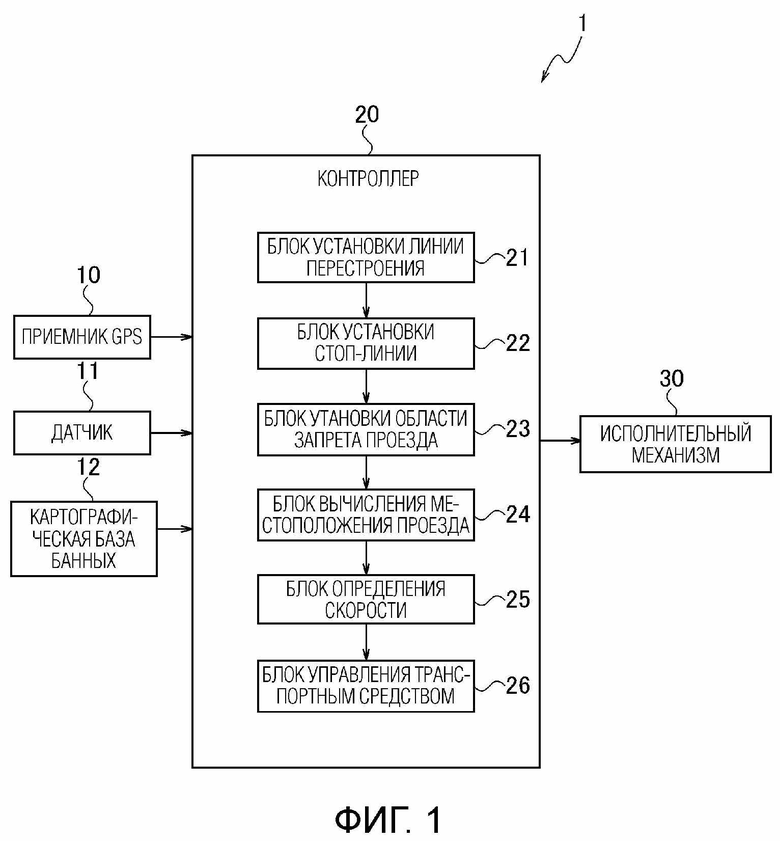
1. Способ управления транспортным средством, содержащий этапы, на которых:
определяют местоположение неподвижного объекта на дороге, по которой движется рассматриваемое транспортное средство;
определяют скорость рассматриваемого транспортного средства;
определяют местоположение и скорость встречного транспортного средства, движущегося в направлении, противоположном направлению движения рассматриваемого транспортного средства, на встречной полосе, смежной с полосой движения, по которой движется рассматриваемое транспортное средство;
устанавливают область на дороге, заданную в направлении продолжения дороги, включающую в себя неподвижный объект;
вычисляют местоположение проезда, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, в соответствии со скоростью рассматриваемого транспортного средства и местоположением и скоростью встречного транспортного средства;
устанавливают пороговое значение скорости тем выше, чем больше расстояние между неподвижным объектом и встречным транспортным средством;
заставляют рассматриваемое транспортное средство замедляться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, больше или равна пороговому значению скорости, соответствующему местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах упомянутой области; и
заставляют рассматриваемое транспортное средство сохранять скорость или ускоряться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, меньше порогового значения скорости, соответствующего местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах упомянутой области.
2. Способ управления транспортным средством, содержащий этапы, на которых:
определяют местоположение неподвижного объекта на дороге, по которой движется рассматриваемое транспортное средство;
определяют скорость рассматриваемого транспортного средства;
определяют местоположение и скорость встречного транспортного средства, движущегося в направлении, противоположном направлению движения рассматриваемого транспортного средства, на встречной полосе, смежной с полосой движения, по которой движется рассматриваемое транспортное средство;
устанавливают виртуальную линию перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от неподвижного объекта на заданное расстояние в направлении движения рассматриваемого транспортного средства;
устанавливают виртуальную стоп-линию в полосе движения в местоположении, удаленном от неподвижного объекта на заданное расстояние в направлении движения встречного транспортного средства;
устанавливают область на дороге, заданную между упомянутой линией перестроения и упомянутой стоп-линией, чтобы она включала в себя упомянутую линию перестроения и упомянутую стоп-линию;
вычисляют местоположение проезда, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, в соответствии со скоростью рассматриваемого транспортного средства и местоположением и скоростью встречного транспортного средства;
заставляют рассматриваемое транспортное средство замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства увеличивается, в случае, в котором местоположение проезда присутствует в упомянутой области; и
заставляют рассматриваемое транспортное средство сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства не увеличивается, в случае, когда местоположение проезда присутствует в пределах упомянутой области.
3. Способ управления транспортным средством по п. 1, дополнительно содержащий этапы, на которых:
устанавливают виртуальную линию перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от неподвижного объекта на заданное расстояние в направлении движения рассматриваемого транспортного средства;
при этом в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, больше или равна пороговому значению скорости, соответствующему местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, и
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, меньше порогового значения скорости, соответствующего местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние.
4. Способ управления транспортным средством по п. 3, в котором:
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства увеличивается; и
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть от рассматриваемого транспортного средства, и скорость встречного транспортного средства не увеличивается.
5. Способ управления транспортным средством по п. 3, в котором:
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства больше или равна пороговому значению скорости, или скорость встречного транспортного средства увеличивается; и
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть от рассматриваемого транспортного средства, скорость встречного транспортного средства меньше порогового значения скорости, и скорость встречного транспортного средства не увеличивается.
6. Способ управления транспортным средством по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
устанавливают виртуальную линию перестроения, проходящую в направлении ширины полосы движения, на встречной полосе движения в местоположении, удаленном от неподвижного объекта на заданное расстояние в направлении движения рассматриваемого транспортного средства;
устанавливают виртуальную стоп-линию в полосе движения в местоположении, удаленном от неподвижного объекта на заданное расстояние в направлении движения встречного транспортного средства; и
устанавливают область на дороге, заданную между упомянутой линией перестроения и упомянутой стоп-линией, чтобы она включала в себя упомянутую линию перестроения и упомянутую стоп-линию,
при этом местоположение проезда, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, вычисляют в соответствии со скоростью рассматриваемого транспортного средства и местоположением и скоростью встречного транспортного средства,
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства больше или равна заданной скорости, или когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства увеличивается, и
в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства меньше заданной скорости, или когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства не увеличивается.
7. Способ управления транспортным средством по п. 6, в котором, в случае, когда местоположение проезда присутствует в пределах упомянутой области, рассматриваемое транспортное средство заставляют замедляться, чтобы остановиться на упомянутой стоп-линии, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства больше или равна заданной скорости, или когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства увеличивается.
8. Способ управления транспортным средством по п. 6 или 7, в котором упомянутую линию перестроения устанавливают в соответствии с местоположением, в котором встречное транспортное средство может остановиться.
9. Способ управления транспортным средством по п. 8, дополнительно содержащий этапы, на которых:
устанавливают виртуальную вторую стоп-линию во встречной полосе движения в местоположении, удаленном от неподвижного объекта на второе заданное расстояние в направлении движения рассматриваемого транспортного средства; и
получают или генерируют профиль скорости, который приводит к остановке встречного транспортного средства на упомянутой второй стоп-линии, в соответствии с местоположением и скоростью встречного транспортного средства,
при этом упомянутую линию перестроения устанавливают в местоположении, в котором скорость, относящаяся к профилю скорости, является второй заданной скоростью.
10. Способ управления транспортным средством по п. 8, в котором, когда фактическая стоп-линия присутствует за неподвижным объектом на встречной полосе движения, упомянутую линию перестроения устанавливают в местоположении, соответствующем фактической стоп-линии.
11. Способ управления транспортным средством по п. 8, в котором, когда место, в котором две или более дорог пересекаются друг с другом, присутствует за неподвижным объектом, упомянутую линию перестроения устанавливают непосредственно перед местоположением, в котором встречное транспортное средство въезжает в место пересечения.
12. Способ управления транспортным средством по п. 9, дополнительно содержащий этап, на котором:
вычитают скорость, относящуюся к профилю скорости, из скорости встречного транспортного средства для вычисления разности скоростей, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства,
при этом рассматриваемое транспортное средство заставляют замедляться, когда разность скоростей больше или равна первому заданному значению,
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда разность скоростей меньше второго заданного значения, и
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда разность скоростей меньше первого заданного значения и больше или равна второму заданному значению.
13. Способ управления транспортным средством по п. 9, дополнительно содержащий этап, на котором:
сравнивают скорость встречного транспортного средства в течение заданного времени со скоростью, относящейся к профилю скорости, в течение заданного времени, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства,
при этом рассматриваемое транспортное средство заставляют замедляться, когда скорость встречного транспортного средства в течение заданного времени превышает скорость, относящуюся к профилю скорости, в течение заданного времени, и
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда скорость встречного транспортного средства в течение заданного времени меньше, чем скорость, относящаяся к профилю скорости, в течение заданного времени.
14. Способ управления транспортным средством по п. 9, дополнительно содержащий этапы, на которых:
вычисляют среднее значение скоростей встречного транспортного средства в течение заданного времени и среднее значение скоростей, относящихся к профилю скорости, в течение заданного времени, когда местоположение встречного транспортного средства находится за упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства; и
вычитают среднее значение скоростей, относящихся к профилю скорости, в течение заданного времени из среднего значения скоростей встречного транспортного средства в течение заданного времени для вычисления второй разности скоростей,
при этом рассматриваемое транспортное средство заставляют замедляться, когда вторая разность скоростей больше или равна третьему заданному значению,
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда вторая разность скоростей меньше четвертого заданного значения, и
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда вторая разность скоростей меньше третьего заданного значения и больше или равна четвертому заданному значению.
15. Способ управления транспортным средством по любому из пп. 6-14, в котором:
рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства увеличивается, или встречное транспортное средство приближается к граничной линии, указывающей границу между полосой движения и встречной полосой движения; и
рассматриваемое транспортное средство заставляют сохранять скорость или ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и скорость встречного транспортного средства не увеличивается, или встречное транспортное средство не приближается к граничной линии.
16. Способ управления транспортным средством по любому из пп. 6-14, в котором:
рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и степень ускорения встречного транспортного средства является заданной степенью ускорения или больше;
рассматриваемое транспортное средство заставляют сохранять скорость, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и степень ускорения встречного транспортного средства меньше, чем заданная степень ускорения; и
рассматриваемое транспортное средство заставляют ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и степень ускорения встречного транспортного средства не достигает заданной степени ускорения в течение заданного времени.
17. Способ управления транспортным средством по п. 15, в котором:
рассматриваемое транспортное средство заставляют замедляться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и расстояние между граничной линией и встречным транспортным средством является третьим заданным расстоянием или короче;
рассматриваемое транспортное средство заставляют сохранять скорость, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и расстояние между граничной линией и встречным транспортным средством длиннее третьего заданного расстояния; и
рассматриваемое транспортное средство заставляют ускоряться, когда местоположение встречного транспортного средства находится перед упомянутой линией перестроения в направлении движения рассматриваемого транспортного средства, если смотреть из рассматриваемого транспортного средства, и расстояние между граничной линией и встречным транспортным средством не снижается ниже третьего заданного расстояния в течение заданного времени.
18. Устройство управления транспортным средством, содержащее:
первый датчик, выполненный с возможностью определения местоположения неподвижного объекта на дороге, по которой движется рассматриваемое транспортное средство;
второй датчик, выполненный с возможностью определения скорости рассматриваемого транспортного средства;
третий датчик, выполненный с возможностью определения местоположения встречного транспортного средства, движущегося в направлении, противоположном направлению движения рассматриваемого транспортного средства, на встречной полосе движения, смежной с полосой движения, по которой движется рассматриваемое транспортное средство;
четвертый датчик, выполненный с возможностью определения скорости встречного транспортного средства; и
контроллер, выполненный с возможностью управления состоянием движения рассматриваемого транспортного средства в соответствии с данными, определенными первым датчиком, вторым датчиком, третьим датчиком и четвертым датчиком,
при этом контроллер выполнен с возможностью:
установки области на дороге, заданной в направлении продолжения дороги, включающей в себя неподвижный объект;
вычисления местоположения проезда, в котором рассматриваемое транспортное средство и встречное транспортное средство проезжают друг друга, в соответствии со скоростью рассматриваемого транспортного средства и местоположением и скоростью встречного транспортного средства;
установки порогового значения скорости тем выше, чем больше расстояние между неподвижным объектом и встречным транспортным средством;
заставления рассматриваемого транспортного средства замедляться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, больше или равна пороговому значению скорости, соответствующему местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах упомянутой области; и
заставления рассматриваемого транспортного средства сохранять скорость или ускоряться, когда скорость встречного транспортного средства, соответствующая местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, меньше порогового значения скорости, соответствующего местоположению встречного транспортного средства, удаленному от неподвижного объекта на заданное расстояние, в случае, когда местоположение проезда присутствует в пределах упомянутой области.
| JP 2017224237 A, 21.12.2017 | |||
| JP 4929970 B2, 09.05.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ФУНКЦИЕЙ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 2016 |
|
RU2705480C1 |
| Способ и устройство управления самоуравновешивающимся транспортным средством | 2015 |
|
RU2641535C2 |

