ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известно устройство содействия вождению, которое избегает столкновения со встречным транспортным средством, когда существует вероятность того, что встречное транспортное средство может отклониться от встречной полосы движения в сторону его полосы движения (Патентная Литература 1). Изобретение, раскрытое в Патентной Литературе 1, определяет, пересекается ли маршрут проезда встречного транспортного средства с его собственной полосой движения в соответствии с расстоянием между припаркованным транспортным средством на встречной полосе и центральной линией дороги. Изобретение, раскрытое в Патентной Литературе 1, приводит к тому, что основное транспортное средство останавливается или замедляется, когда определено, что маршрут проезда встречного транспортного средства пересекается с его собственной полосой движения.
СПИСОК ЦИТИРОВАНИЯ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная Литература 1: Публикация находящейся на рассмотрении патентной заявки Японии № 2008-102690
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Изобретение, раскрытое в Патентной Литературе 1, не учитывает намерение водителя встречного транспортного средства и, таким образом, может привести к ненужному замедлению или остановке основного транспортного средства, даже когда основное транспортное средство и встречное транспортное средство могут разъезжаться друг с другом без близкой точки соприкосновения.
[0005]
Для решения традиционной проблемы, описанной выше, настоящее изобретение обеспечивает способ управления транспортным средством и устройство управления транспортным средством, выполненные с возможностью учета намерения водителя встречного транспортного средства.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0006]
Способ управления транспортным средством согласно аспекту настоящего изобретения задает область, включающую в себя неподвижный объект на дороге, определяемую в пределах предопределенного расстояния от неподвижного объекта вдоль направления прохождения дороги, вычисляет позицию разъезда, в которой основное транспортное средство и встречное транспортное средство разъезжаются друг с другом, в соответствии со скоростью основного транспортного средства, а также позицией и скоростью встречного транспортного средства, вычисляет первый показатель, который является тем большим значением, чем выше скорость встречного транспортного средства, вычисляет второй показатель, который является тем большим значением, чем выше величина ускорения встречного транспортного средства, объединяет первый показатель со вторым показателем таким образом, чтобы вычислить объединенный показатель, и побуждает основное транспортное средство замедляться, когда объединенный показатель больше или равен предопределенному значению, или побуждает основное транспортное средство поддерживать скорость или ускоряться, когда объединенный показатель меньше предопределенного значения, в случае, когда упомянутая позиция разъезда имеется в пределах упомянутой области.
БЛАГОПРИЯТНЫЕ ЭФФЕКТЫ
[0007]
Настоящее изобретение позволяет управлять транспортным средством с учетом намерения водителя встречного транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг. 1] Фиг. 1 представляет собой схематичное представление конфигурации устройства 1 управления транспортным средством согласно варианту осуществления настоящего изобретения.
[Фиг. 2] Фиг. 2 представляет собой вид, поясняющий не обеспечивающую возможность разъезда область R согласно варианту осуществления настоящего изобретения.
[Фиг. 3] Фиг. 3 представляет собой вид, поясняющий позицию P разъезда согласно варианту осуществления настоящего изобретения.
[Фиг. 4] Фиг. 4 представляет собой график, поясняющий связь между скоростью встречного транспортного средства и первым показателем.
[Фиг. 5] Фиг. 5 представляет собой график, поясняющий связь между величиной ускорения встречного транспортного средства и первым показателем.
[Фиг. 6] Фиг. 6 представляет собой вид, поясняющий случай разъезда на узкой дороге согласно варианту осуществления настоящего изобретения.
[Фиг. 7A] Фиг. 7A представляет собой блок-схему последовательности операций, поясняющую работу устройства 1 управления транспортным средством согласно варианту осуществления настоящего изобретения.
[Фиг. 7B] Фиг. 7B представляет собой блок-схему последовательности операций, поясняющую пример работы устройства 1 управления транспортным средством согласно варианту осуществления настоящего изобретения.
[Фиг. 8] Фиг. 8 представляет собой вид, поясняющий весовой коэффициент, на который умножается второй показатель.
[Фиг. 9] Фиг. 9 представляет собой вид, поясняющий весовые коэффициенты, на которые умножаются первый показатель и второй показатель.
[Фиг. 10] Фиг. 10 представляет собой вид, поясняющий пороговое значение скорости согласно модифицированному примеру 3 настоящего изобретения.
[Фиг. 11] Фиг. 11 представляет собой вид, поясняющий пороговое значение скорости согласно модифицированному примеру 3 настоящего изобретения.
[Фиг. 12] Фиг. 12 представляет собой вид, поясняющий пороговое значение скорости согласно модифицированному примеру 3 настоящего изобретения.
[Фиг. 13] Фиг. 13 представляет собой график, поясняющий связь между скоростью встречного транспортного средства и первым показателем.
[Фиг. 14] Фиг. 14 представляет собой график, поясняющий связь между скоростью встречного транспортного средства и первым показателем.
[Фиг. 15] Фиг. 15 представляет собой вид, поясняющий пороговое значение величины ускорения согласно модифицированному примеру 4 настоящего изобретения.
[Фиг. 16] Фиг. 16 представляет собой график, поясняющий связь между величиной ускорения встречного транспортного средства и вторым показателем.
[Фиг. 17] Фиг. 17 представляет собой график, поясняющий связь между величиной ускорения встречного транспортного средства и вторым показателем.
[Фиг. 18] Фиг. 18 представляет собой вид, поясняющий допустимый предел, задаваемый для порогового значения скорости.
[Фиг. 19] Фиг. 19 представляет собой вид, поясняющий ширину транспортного средства собственно припаркованного транспортного средства.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Далее со ссылками на чертежи описаны некоторые варианты осуществления настоящего изобретения. Одни и те же элементы, проиллюстрированные на чертежах, обозначены одними и теми же ссылочными позициями, и повторяющиеся пояснения ниже не приводятся.
[0010]
Настоящий вариант осуществления
<Пример Конфигурации Устройства Управления Транспортным Средством>
Пример конфигурации устройства 1 управления транспортным средством согласно настоящему варианту осуществления описан ниже со ссылкой на Фиг. 1. Как показано на Фиг. 1, устройство 1 управления транспортным средством включает в себя GPS-приемник 10, датчик 11, базу 12 картографических данных, контроллер 20 и исполнительный механизм 30.
[0011]
Устройство 1 управления транспортным средством может быть установлено либо на транспортном средстве, оборудованном функцией автоматизированного вождения, либо на транспортном средстве, не оборудованном функцией автоматизированного вождения. Устройство 1 управления транспортным средством может быть установлено на транспортном средстве, способном переключаться между автоматическим вождением и ручным вождением. Термин «автоматизированное вождение», используемый в настоящем варианте осуществления, относится к состоянию, в котором по меньшей мере любой из исполнительных механизмов, например тормоз, акселератор и рулевое колесо, управляется без вмешательства в работу со стороны занимающего место лица (occupant). Таким образом, автоматизированное вождение может включать в себя состояние, при котором другие исполнительные механизмы управляются занимающим место лицом. Автоматизированное вождение также относится к состоянию, при котором требуется лишь выполнение какого-либо управления, такого как управление ускорением/замедлением и управление позицией в поперечном направлении. Термин «ручное вождение», используемый в настоящем варианте осуществления, относится к состоянию, в котором занимающее место лицо управляет, например, тормозом, акселератором и рулевым колесом.
[0012]
GPS-приемник 10 принимает радиоволны от искусственного спутника таким образом, чтобы обнаруживать позиционную информацию основного транспортного средства на земле. Позиционная информация основного транспортного средства, обнаруживаемая GPS-приемником 10, включает в себя информацию о широте и информацию о долготе. GPS-приемник 10 выводит обнаруженную позиционную информацию основного транспортного средства на контроллер 20. Средство обнаружения позиционной информации основного транспортного средства не ограничено GPS-приемником 10. Например, одометрия может использоваться для оценки позиции основного транспортного средства. Одометрия является способом получения величины движения и направления продвижения транспортного средства в соответствии с углом поворота и угловой скоростью транспортного средства, чтобы оценить позицию транспортного средства.
[0013]
Датчик 11 представляет собой устройство, устанавливаемое на основном транспортном средстве для обнаружения объектов в окружении основного транспортного средства. Датчик 11 включает в себя датчики нескольких типов, например камеру, лидар, радар, радар миллиметрового диапазона, лазерный дальномер и сонар. Датчик 11 обнаруживает, в качестве объектов в окружении основного транспортного средства, движущиеся объекты, в том числе другие транспортные средства, мотоциклы, велосипеды и пешеходы, а также неподвижные объекты, в том числе препятствия, упавшие объекты и припаркованные транспортные средства. Датчик 11 также обнаруживает позицию, угловую ориентацию (угол рыскания), размер, скорость, величину ускорения, величину замедления и скорость рыскания соответствующих движущихся объектов и неподвижных объектов по отношению к основному транспортному средству. Датчик 11 может также включать в себя другие датчики, такие как датчик скорости вращения колеса (второй датчик), датчик угла поворота рулевого колеса и гироскопический датчик. Датчик скорости вращения колеса обнаруживает скорость вращения колес основного транспортного средства. Обнаруживая скорость вращения колес можно получать скорость основного транспортного средства. Датчик 11 выводит обнаруженную информацию на контроллер 20.
[0014]
База 12 картографических данных представляет собой базу данных, хранящуюся, например, в автомобильном навигационном устройстве, и включает в себя картографическую информацию, например информацию о дороге и информацию о сооружениях, необходимую для направления по маршруту. Информация о дороге относится к информации о количестве полос движения на дороге, разграничительных линиях дороги и отношении соединения полос движения. База 12 картографических данных выводит картографическую информацию на контроллер 20 в ответ на запрос от контроллера 20. Хотя настоящий вариант осуществления проиллюстрирован для случая, в котором устройство 1 управления транспортным средством включает в себя базу 12 картографических данных, устройство 1 управления транспортным средством не обязательно включает в себя базу 12 картографических данных. Картографическая информация может быть получена датчиком 11 или может быть получена посредством связи между транспортными средствами или связи между дорогой и транспортным средством. Когда картографическая информация хранится на сервере, установленном во внешней среде, устройство 1 управления транспортным средством может получать картографическую информацию с сервера посредством связи, по мере необходимости. Устройство 1 управления транспортным средством может регулярно получать самую последнюю картографическую информацию с сервера, чтобы обновлять сохраненную картографическую информацию.
[0015]
Контроллер 20 представляет собой микрокомпьютер общего назначения, включающий в себя центральный процессор (CPU), память и блок ввода-вывода. Компьютерная программа устанавливается на микрокомпьютере, чтобы он функционировал в качестве устройства 1 управления транспортным средством. При исполнении компьютерной программы микрокомпьютер функционирует как множество схем обработки информации, включенных в устройство 1 управления транспортным средством. Хотя настоящий вариант осуществления иллюстрируется случаем, в котором для обеспечения соответствующих схем обработки информации, включаемых в устройство 1 управления транспортным средством, устанавливается программное обеспечение, для обеспечения этих схем обработки информации для исполнения каждой обработки информации, которая описана ниже, может быть изготовлено выделенное аппаратное обеспечение. Соответствующие схемы обработки информации могут состоять из отдельного аппаратного обеспечения. Контроллер 20 включает в себя, в качестве примеров многочисленных схем обработки информации, блок 21 задания не обеспечивающей возможность разъезда области, блок 22 вычисления позиции разъезда, блок 23 вычисления первого показателя, блок 24 вычисления второго показателя, блок 25 вычисления объединенного показателя, блок 26 определения скорости и блок 27 управления транспортным средством.
[0016]
Блок 21 задания не обеспечивающей возможность разъезда области задает не обеспечивающую возможность разъезда область в качестве некоторой области на дороге, определяемой в пределах предопределенного расстояния от припаркованного транспортного средства вдоль направления прохождения дороги. Не обеспечивающая возможность разъезда область задается как область в пределах предопределенного расстояния от припаркованного транспортного средства вдоль направления прохождения дороги, в которой основному транспортному средству запрещается разъезжаться с встречным транспортным средством, поскольку основному транспортному средству будет сложно разъехаться с встречным транспортным средством вдоль припаркованного транспортного средства, когда ширина дороги, за исключением припаркованного транспортного средства, меньше ширины, достаточной для безопасного разъезда с встречным транспортным средством.
[0017]
Блок 22 вычисления позиции разъезда определяет, присутствует ли позиция, в которой основное транспортное средство и встречное транспортное средство разъезжаются друг с другом в пределах не обеспечивающей возможность разъезда области, заданной блоком 21 задания не обеспечивающей возможность разъезда области. В частности, блок 22 вычисления позиции разъезда вычисляет позицию разъезда, в которой основное транспортное средство разъезжается с встречным транспортным средством, в соответствии с относительным расстоянием между основным транспортным средством и встречным транспортным средством, скоростью основного транспортного средства и скоростью встречного транспортного средства. Блок 22 вычисления позиции разъезда затем определяет, присутствует ли вычисленная позиция разъезда в пределах не обеспечивающей возможность разъезда области. Относительное расстояние между основным транспортным средством и встречным транспортным средством, скорость основного транспортного средства и скорость встречного транспортного средства обнаруживаются датчиком 11.
[0018]
Блок 23 вычисления первого показателя вычисляет первый показатель в соответствии со скоростью встречного транспортного средства, когда блок 22 вычисления позиции разъезда определяет, что позиция разъезда присутствует в пределах не обеспечивающей возможность разъезда области. Первый показатель может быть вычислен независимо от определения того, присутствует ли в пределах упомянутой не обеспечивающей возможность разъезда области позиция разъезда, осуществляемого блоком 22 вычисления позиции разъезда.
[0019]
Блок 24 вычисления второго показателя вычисляет второй показатель в соответствии с величиной ускорения встречного транспортного средства, когда блок 22 вычисления позиции разъезда определяет, что позиция разъезда присутствует в пределах не обеспечивающей возможность разъезда области. Второй показатель может быть вычислен независимо от определения того, присутствует ли в пределах упомянутой не обеспечивающей возможность разъезда области позиция разъезда, осуществляемого блоком 22 вычисления позиции разъезда.
[0020]
Блок 25 вычисления объединенного показателя объединяет первый показатель, вычисленный блоком 23 вычисления первого показателя, со вторым показателем, вычисленным блоком 24 вычисления второго показателя, чтобы вычислить объединенный показатель. Термин «объединение», используемый в настоящем варианте осуществления, относится к сложению.
[0021]
Блок 26 определения скорости оценивает намерение водителя встречного транспортного средства посредством использования объединенного показателя, когда блок 22 вычисления позиции разъезда определяет, что позиция разъезда присутствует в пределах не обеспечивающей возможность разъезда области. Затем блок 26 определения скорости определяет скорость основного транспортного средства в соответствии с оцененным намерением. Настоящий вариант осуществления описан ниже исходя из предположения, что встречное транспортное средство управляется ручным вождением, осуществляемым водителем, но не ограничивается этим случаем. Встречное транспортное средство может быть транспортным средством с автоматизированным вождением. Когда встречное транспортное средство управляется посредством автоматизированного вождения, намерение, оцененное блоком 26 определения скорости, соответствует действию, ожидаемому устройством управления вождением, установленным на встречном транспортном средстве. Блок 26 определения скорости может оценивать намерение водителя встречного транспортного средства в соответствии с объединенным показателем независимо от определения того, присутствует ли в пределах упомянутой не обеспечивающей возможность разъезда области позиция разъезда, осуществляемого блоком 22 вычисления позиции разъезда.
[0022]
Блок 27 управления транспортным средством управляет исполнительным механизмом 30, чтобы побудить основное транспортное средство к движению со скоростью, определяемой блоком 26 определения скорости. Исполнительный механизм 30 включает в себя исполнительный механизм тормоза, исполнительный механизм педали акселератора и исполнительный механизм рулевого управления.
[0023]
Не обеспечивающая возможность разъезда область, заданная блоком 21 задания не обеспечивающей возможность разъезда области, описана ниже со ссылкой на Фиг. 2. Фиг. 2 иллюстрирует дорогу с одной полосой движения в каждом направлении. Фиг. 2 иллюстрирует случай, когда основное транспортное средство 50 движется влево, а встречное транспортное средство 51 движется вправо. Направление движения основного транспортного средства 50 противоположно направлению движения встречного транспортного средства 51. Полоса, по которой движется основное транспортное средство 50, называется в данном документе полосой движения, а полоса, по которой движется встречное транспортное средство 51, называется в данном документе полосой встречного движения. Полоса встречного движения расположена рядом с полосой движения.
[0024]
В ситуации, проиллюстрированной на Фиг. 2, предполагается, что припаркованное транспортное средство 52 и встречное транспортное средство 51 были обнаружены датчиком 11. В частности, предполагается, что позиционная информация и скорость припаркованного транспортного средства 52, а также позиционная информация и скорость встречного транспортного средства 51 были обнаружены датчиком 11. Позиционная информация припаркованного транспортного средства 52 и позиционная информация встречного транспортного средства 51 обнаруживаются, например, лазерным дальномером (первый датчик, третий датчик). Лазерный дальномер испускает радиоволны для сканирования объектов (в данном случае припаркованного транспортного средства 52 и встречного транспортного средства 51) и измеряет отраженные радиоволны, чтобы получить расстояние и направление до соответствующих объектов. Каждая из позиции припаркованного транспортного средства 52 и позиции встречного транспортного средства 51 может быть обнаружена как относительная позиция по отношению к позиции основного транспортного средства 50 или может быть обнаружена как позиция по координатам, основанным на позиции основного транспортного средства 50 в качестве исходной точки.
[0025]
Скорость припаркованного транспортного средства 52 и скорость встречного транспортного средства 51 обнаруживаются, например, камерой. Различие между текущим изображением, захватываемым камерой, и изображением непосредственно предыдущего кадра извлекается, чтобы получить скорость припаркованного транспортного средства 52 и скорость встречного транспортного средства 51. Частота кадров камеры может быть, но не обязательно, установлена равной 30 кадрам в секунду (fps) или 60 fps. Припаркованное транспортное средство 52 в настоящем варианте осуществления определяется как неподвижный объект, поскольку скорость припаркованного транспортного средства 52 обнаруживается равной нулю. А именно, объект, обнаруживаемый в окружении основного транспортного средства 50, определяется как неподвижный объект, когда скорость этого объекта равняется нулю или он имеет очень низкую скорость, так что предполагается, что она приблизительно равняется нулю. Хотя настоящий вариант осуществления иллюстрирует припаркованное транспортное средство 52 как неподвижный объект, неподвижный объект не ограничивается припаркованным транспортным средством 52. Примеры неподвижных объектов включают в себя упавший объект и пилон (также называемый дорожным конусом). Припаркованное транспортное средство 52 находится на встречной полосе движения.
[0026]
Как проиллюстрировано на Фиг. 2, блок 21 задания не обеспечивающей возможность разъезда области задает не обеспечивающую возможность разъезда область R, включающую в себя припаркованное транспортное средство 52 на дороге, определяемую в пределах предопределенной области вдоль направления прохождения дороги. Форма не обеспечивающей возможность разъезда области R может быть определена надлежащим образом и может, например, быть прямоугольной. Причина задания не обеспечивающей возможность разъезда области R состоит в том, чтобы предотвратить ощущение дискомфорта у занимающего место лица из-за близкого приближения встречного транспортного средства 51 к основному транспортному средству 50, когда встречное транспортное средство 51 избегает припаркованного транспортного средства 52, чтобы разъехаться с основным транспортным средством 50. Таким образом, припаркованное транспортное средство 52 в этом случае присутствует в не обеспечивающей возможность разъезда области R.
[0027]
После того, как не обеспечивающая возможность разъезда область R задается блоком 21 задания не обеспечивающей возможность разъезда области, блок 22 вычисления позиции разъезда определяет, присутствует ли позиция, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, в не обеспечивающей возможность разъезда области R. В частности, как проиллюстрировано на Фиг. 3, блок 22 вычисления позиции разъезда вычисляет позицию P, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом в соответствии с относительным расстоянием L1 между основным транспортным средством 50 и встречным транспортным средством 51 (расстоянием от позиции основного транспортного средства 50, если она определена в качестве исходной точки), скоростью V1 основного транспортного средства 50 и скоростью V2 встречного транспортного средства 51. Позиция P разъезда вычисляется согласно следующему уравнению (1):

[0028]
Блок 22 вычисления позиции разъезда определяет, присутствует ли вычисленная позиция P разъезда в не обеспечивающей возможность разъезда области R. Фиг. 3 иллюстрирует случай, в котором позиция P разъезда присутствует в пределах не обеспечивающей возможность разъезда области R.
[0029]
Когда блок 22 вычисления позиции разъезда определяет, что позиция P разъезда присутствует в пределах не обеспечивающей возможность разъезда области R, как проиллюстрировано на Фиг. 3, блок 23 вычисления первого показателя вычисляет первый показатель в соответствии со скоростью встречного транспортного средства 51. В частности, блок 23 вычисления первого показателя вычисляет первый показатель, который является тем большим значением, чем выше скорость встречного транспортного средства. Пример первого показателя описан ниже со ссылкой на Фиг. 4.
[0030]
Фиг. 4 указывает скорость встречного транспортного средства 51 по оси абсцисс и указывает первый показатель по оси ординат. Первый показатель пропорционален скорости встречного транспортного средства 51. Первый показатель не ограничен конкретным значением и может быть опциональным значением, определяемым надлежащим образом. Первый показатель s1 задается следующим уравнением (2):

где vt представляет собой скорость встречного транспортного средства 51, а f1 представляет собой функцию для нормализации.
[0031]
Когда блок 22 вычисления позиции разъезда определяет, что позиция P разъезда присутствует в пределах не обеспечивающей возможность разъезда области R, как проиллюстрировано на Фиг. 3, блок 24 вычисления второго показателя вычисляет второй показатель в соответствии со скоростью встречного транспортного средства 51. В частности, блок 24 вычисления второго показателя вычисляет второй показатель, который является тем большим значением, чем выше величина ускорения встречного транспортного средства 51. Пример второго показателя описан ниже со ссылкой на Фиг. 5.
[0032]
Фиг. 5 указывает величину ускорения встречного транспортного средства 51 по оси абсцисс и указывает второй показатель по оси ординат. Второй показатель пропорционален величине ускорения встречного транспортного средства 51. Второй показатель также не ограничен конкретным значением и может быть опциональным значением, определяемым надлежащим образом, как и в случае с первым показателем. Второй показатель s2 задается следующим уравнением (3):

где at представляет собой величину ускорения встречного транспортного средства 51, а f2 представляет собой функцию для нормализации, как и в случае функции f1.
[0033]
Блок 25 вычисления объединенного показателя объединяет первый показатель s1, вычисляемый блоком 23 вычисления первого показателя, со вторым показателем s2, вычисляемым блоком 24 вычисления второго показателя, чтобы вычислить объединенный показатель. Объединенный показатель s задается следующим уравнением (4):

[0034]
Блок 26 определения скорости оценивает намерение водителя встречного транспортного средства 51 в соответствии с объединенным показателем, вычисляемым блоком 25 вычисления объединенного показателя, чтобы определить скорость основного транспортного средства 50. В ситуации, проиллюстрированной на Фиг. 2, в качестве намерения водителя встречного транспортного средства 51 предполагается два случая. Одним из намерений является случай, при котором встречное транспортное средство 51 проезжает мимо припаркованного транспортного средства 52 до того, как основное транспортное средство 50 проедет мимо этого припаркованного транспортного средства 52, а другим является случай, когда встречное транспортное средство 51 проезжает мимо припаркованного транспортного средства 52 после того, как основное транспортное средство 50 проехало это припаркованное транспортное средство 52. А именно, намерение водителя встречного транспортного средства 51, которое подлежит определению, состоит в том, следует ли ожидать, пока основное транспортное средство 50 проедет припаркованное транспортное средство 52.
[0035]
Причина оценки намерения водителя встречного транспортного средства 51 заключается в том, что основное транспортное средство 50 может избежать резкого торможения или ненужного ускорения или замедления, когда скорость основного транспортного средства 50 определяется в соответствии с оцениваемым намерением водителя встречного транспортного средства 51. Например, когда намерение водителя встречного транспортного средства 51 состоит в ожидании, пока основное транспортное средство 50 проедет мимо припаркованного транспортного средства 25, основным транспортным средством 50 можно управлять для поддержания скорости или ускорения, чтобы проехать припаркованное транспортное средство 52 первым. Когда намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать мимо припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50, основным транспортным средством 50 можно управлять для замедления, чтобы плавно остановиться в позиции (в позиции за пределами не обеспечивающей возможность разъезда области R), в которой может исключаться близкое приближение основного транспортного средства 50 к встречному транспортному средству 51, которое может отклониться по направлению к полосе движения, чтобы объехать припаркованное транспортное средство 52.
[0036]
Если намерение водителя встречного транспортного средства 51 не оценивается, основное транспортное средство 50 может быть вынуждено совершить резкое торможение или ненужное ускорение, или замедление. Например, когда заблокированный участок, возникающий из-за припаркованного транспортного средства 52, является большим, или когда в окружении припаркованного транспортного средства 52 имеется пешеходный переход, встречное транспортное средство 51 будет ускоряться, чтобы проезжать мимо припаркованного транспортного средства 52 после кратковременного замедления или остановки для безопасности. В таком случае основное транспортное средство 50 сначала начинает ускоряться, поскольку позиция Р разъезда временно смещается в сторону встречного транспортного средства 51 из-за замедления встречного транспортного средства 51. Однако основному транспортному средству 50 вскоре требуется замедлить скорость, поскольку встречное транспортное средство 51 снова ускоряется, а позиция Р разъезда затем смещается в сторону основного транспортного средства 50. А именно, случай, когда встречное транспортное средство 51 проезжает мимо припаркованного транспортного средства 52 перед основным транспортным средством 50, включает в себя случай, в котором встречное транспортное средство 51 сначала замедляется, а затем начинает ускоряться, чтобы проехать мимо припаркованного транспортного средства 52. Однако управление ускорением/замедлением для основного транспортного средства 50 в таком случае неизбежно переключается, если намерение водителя встречного транспортного средства 51 не оценивается, что может привести к тому, что основное транспортное средство 50 осуществляет резкое торможение или ненужное ускорение, или замедление, соответственно. В настоящем варианте осуществления оценивается намерение водителя встречного транспортного средства 51 определить скорость основного транспортного средства 50, чтобы избежать внезапного торможения или ненужного ускорения, или замедления.
[0037]
Ниже описан способ оценки намерения водителя встречного транспортного средства 51 с использованием объединенного показателя. Когда объединенный показатель больше или равен предопределенному значению, блок 26 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать мимо припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50. Блок 26 определения скорости в этом случае определяет величину замедления основного транспортного средства 50, чтобы привести основное транспортное средство 50 к плавной остановке в позиции, позволяющей основному транспортному средству 50 избежать близкого сближения с встречным транспортным средством 51 (в позиции за пределами не обеспечивающей возможность разъезда области R).
[0038]
Когда объединенный показатель меньше упомянутого предопределенного значения, блок 26 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда основное транспортное средство 50 проедет припаркованное транспортное средство 52. Блок 26 определения скорости в этом случае определяет, следует ли побудить основное транспортное средство 50 к поддержанию текущей скорости или ускорению, чтобы привести основное транспортное средство 50 к проезду припаркованного транспортного средства 52 перед встречным транспортным средством 51. Упомянутое предопределенное значение может быть получено путем экспериментов или моделирований. Упомянутое предопределенное значение может быть изменено в зависимости от водителя. Намерение водителя может быть оценено с высокой точностью, когда упомянутое предопределенное значение меняется в зависимости от водителя, поскольку состояние вождения меняется в зависимости от характеристик и предпочтения водителя.
[0039]
После того как скорость основного транспортного средства 50 определена блоком 26 определения скорости, блок 27 управления транспортным средством управляет соответствующими исполнительными механизмами 30 (такими как исполнительный механизм тормоза, исполнительный механизм педали акселератора и исполнительный механизм рулевого управления), чтобы привести основное транспортное средство 50 к движению с определенной скоростью. В частности, когда объединенный показатель больше или равен предопределенному значению, блок 27 управления транспортным средством замедляет основное транспортное средство 50 с величиной замедления, определяемой блоком 26 определения скорости, чтобы привести основное транспортное средство 50 к плавной остановке в позиции за пределами не обеспечивающей возможность разъезда области R. Когда объединенный показатель меньше упомянутого предопределенного значения, блок 27 управления транспортным средством приводит основное транспортное средство к поддержанию текущей скорости или ускорению с величиной ускорения, определяемой блоком 26 определения скорости. Блок 27 управления транспортным средством в этом случае постепенно ускоряет основное транспортное средство 50, так что позиция P разъезда смещается за пределы не обеспечивающей возможность разъезда области R. Устройство 1 управления транспортным средством согласно настоящему варианту осуществления оценивает намерение водителя встречного транспортного средства 51 с использованием объединенного показателя и определяет скорость основного транспортного средства 50 на основе оцениваемого намерения. Таким образом, устройство 1 управления транспортным средством может избежать внезапного торможения или ненужного ускорения, или замедления, соответственно.
[0040]
Каждый из проиллюстрированных выше случаев предполагается как ситуация, в которой ни основное транспортное средство 50, ни встречное транспортное средство 51 не могут проезжать мимо припаркованного транспортного средства 52 одновременно, или ситуация, в которой основное транспортное средство 50 и встречное транспортное средство 51 могут разъезжаться у припаркованного транспортного средства 52 одновременно, но им следует избегать такого одновременного разъезда, поскольку существует вероятность того, что занимающее место лицо будет чувствовать себя некомфортно из-за близкого сближения основного транспортного средства 50 и встречного транспортного средства 51. Основное транспортное средство 50 и встречное транспортное средство 51 могут безопасно разъезжаться у припаркованного транспортного средства 52 одновременно, не вызывая дискомфорта у занимающего место лица, в зависимости от ширины дороги, ширины транспортного средства собственно припаркованного транспортного средства 52, ширины транспортного средства собственно основного транспортного средства 50 и ширины транспортного средства собственно встречного транспортного средства 51. Условия, позволяющие основному транспортному средству 50 и встречному транспортному средству 51 безопасно одновременно проезжать у припаркованного транспортного средства 52, не вызывая дискомфорта у занимающего место лица, требуют пространства, достаточного для обеспечения расстояния между встречным транспортным средством 51 и припаркованным транспортным средством 52, а также пространства, достаточного для обеспечения расстояния между основным транспортным средством 50 и встречным транспортным средством 51. Этот момент подробно описан ниже со ссылкой на Фиг. 6. Датчик 11 обнаруживает ширину W1, достаточную для того, чтобы встречное транспортное средство 51 продолжало движение, избегая при этом припаркованное транспортное средство 52, как проиллюстрировано на Фиг. 6. Ширина W1 может быть получена таким образом, при котором ширина транспортного средства собственно встречного транспортного средства 51 прибавляется к пространству, достаточному для предотвращения близкого приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Затем датчик 11 обнаруживает оставшуюся ширину W2 полосы движения, получаемую таким образом, при котором ширина транспортного средства собственно припаркованного транспортного средства 52 (ширина транспортного средства, перекрывающаяся с дорогой) и ширина W1 вычитаются из общей ширины дороги. Блок 22 вычисления позиции разъезда определяет, достаточна ли оставшаяся ширина W2 полосы движения, чтобы предотвратить возникновение у пассажира ощущения дискомфорта, когда основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом. Когда оставшаяся ширина W2 полосы движения достаточна для того, чтобы предотвратить возникновение у пассажира ощущения дискомфорта, когда основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, каждое из основного транспортного средства 50 и встречного транспортного средства 51 может замедляться, чтобы разъезжаться друг с другом на узкой дороге.
[0041]
Пример работы устройства 1 управления транспортным средством описан ниже со ссылкой на блок-схемы последовательностей операций, показанные на Фиг. 7А-7В. Описанный ниже процесс повторяется в предопределенном цикле.
[0042]
На этапе S101 контроллер 20 получает картографическую информацию из базы 12 картографических данных. Процесс переходит на этап S103, и GPS-приемник 10 обнаруживает позиционную информацию основного транспортного средства 50.
[0043]
Когда припаркованное транспортное средство 52 и встречное транспортное средство 51 обнаруживаются датчиком 11 (ДА на этапе S105), процесс переходит на этап S107. Когда припаркованное транспортное средство 52 или встречное транспортное средство 51 не обнаруживается (НЕТ на этапе S105), серия обработки завершается.
[0044]
На этапе S107 блок 21 задания не обеспечивающей возможность разъезда области задает не обеспечивающую возможность разъезда область R, включающую в себя припаркованное транспортное средство 52, на дороге, определяемой в пределах предопределенной области вдоль направления прохождения дороги (см. Фиг. 2). Процесс переходит на этап S109 и блок 22 вычисления позиции разъезда определяет, присутствует ли позиция P, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом в пределах не обеспечивающей возможность разъезда области R, заданной на этапе S107.
[0045]
Когда позиция P, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, присутствует в пределах не обеспечивающей возможность разъезда области R (ДА на этапе S111), процесс переходит на этап S113. Когда позиция P, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, не присутствует в пределах не обеспечивающей возможность разъезда области R (НЕТ на этапе S111), процесс переходит на этап S119.
[0046]
На этапе S113 датчик 11 обнаруживает ширину W1, достаточную для того, чтобы встречное транспортное средство 51 продолжало движение, избегая при этом припаркованное транспортное средство 52 (см. Фиг. 6). Датчик 11 затем обнаруживает оставшуюся ширину W2 полосы движения, получаемую таким образом, при котором ширина транспортного средства собственно припаркованного транспортного средства 52 и ширина W1 вычитаются из общей ширины дороги (см. Фиг. 6). Процесс переходит на этап S115, и блок 22 вычисления позиции разъезда определяет, является ли оставшаяся ширина W2 полосы движения, обнаруженная на этапе S113, достаточной, чтобы избежать близкого сближения между основным транспортным средством 50 и встречным транспортным средством 51 при разъезде друг с другом. Когда результатом определения на этапе S115 является ДА, процесс переходит на этап S117, и основное транспортное средство 50 побуждается к продолжению движения для разъезда с встречным транспортным средством 51 на узкой дороге. Когда основное транспортное средство 50 и встречное транспортное средство 51 разъехались друг с другом (ДА на этапе S119), серия обработки завершается. Когда результатом определения на этапе S115 является НЕТ, процесс переходит на этап S121.
[0047]
На этапе S121 блок 23 вычисления первого показателя вычисляет первый показатель, который является тем большим значением, чем выше скорость встречного транспортного средства 51 (см. Фиг. 4). Процесс переходит на этап S123, и блок 24 вычисления второго показателя вычисляет второй показатель, который является тем большим значением, чем выше скорость встречного транспортного средства 51 (см. Фиг. 5). Процесс переходит на этап S125, и блок 25 вычисления объединенного показателя объединяет первый показатель, вычисленный на этапе S121, со вторым показателем, вычисленным на этапе S123, чтобы вычислить объединенный показатель.
[0048]
Когда объединенный показатель больше или равен предопределенному значению (ДА на этапе S127), процесс переходит на этап S129 и блок 26 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы проехать мимо припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50. Блок 26 определения скорости затем определяет величину замедления основного транспортного средства 50 для его плавной остановки в позиции, в которой основное транспортное средство 50 может избежать близкого сближения с встречным транспортным средством 51 (в позиции за пределами не обеспечивающей возможность разъезда области R). Блок 27 управления транспортным средством замедляет основное транспортное средство 50 с величиной замедления, определяемой блоком 26 определения скорости, чтобы привести основное транспортное средство 50 к плавной остановке в позиции за пределами не обеспечивающей возможность разъезда области R).
[0049]
Когда объединенный показатель меньше упомянутого предопределенного значения (НЕТ на этапе S127), процесс переходит на этап S131 и блок 26 определения скорости оценивает, что намерение водителя встречного транспортного средства 51 состоит в том, чтобы дождаться, когда основное транспортное средство 50 проедет припаркованное транспортное средство 52. Затем блок 26 определения скорости определяет, что следует побудить основное транспортное средство 50 поддерживать текущую скорость или ускоряться. Блок 27 управления транспортным средством побуждает основное транспортное средство 50 к поддержанию текущей скорости или ускорению с величиной ускорения, определяемой блоком 26 определения скорости. Обработка на этапе S133 аналогична обработке на этапе S119, и совпадающие пояснения ниже не повторяются.
[0050]
В примере, описанном выше, блок 22 вычисления позиции разъезда определяет, является ли оставшаяся ширина W2 полосы движения достаточной для проезда основного транспортного средства 50, когда позиция Р разъезда, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, присутствует в пределах не обеспечивающей возможность разъезда области R (ДА на этапе S111). Хотя первый показатель, второй показатель и объединенный показатель вычисляются как описано выше (на этапе S121, этапе S123 и этапе S125), когда оставшаяся ширина W2 полосы движения определена как недостаточная (НЕТ на этапе S115), настоящий вариант осуществления этим случаем не ограничивается. Например, первый показатель, второй показатель и объединенный показатель могут вычисляться постоянно вне зависимости от определений, выполняемых на этапе S111 и этапе S115. В качестве альтернативы процесс может перейти на этап S127 в соответствии с результатами определения на этапе S111 и этапе S115 для того, чтобы определить, превышает ли объединенный показатель предопределенное значение или равен ему. В качестве альтернативы обработка на этапах с S113 по S117 может пропускаться, а контроллер 20 может постоянно управлять процессом для перехода на этап S127, когда позиция P разъезда присутствует в пределах не обеспечивающей возможность разъезда области R (ДА на этапе S111) с тем, чтобы определять, больше ли объединенный показатель значение, чем предопределенное значение, или равняется ему.
[0051]
<Эксплуатационные Эффекты>
Как описано выше, устройство 1 управления транспортным средством согласно настоящему варианту осуществления может достигать следующих эксплуатационных эффектов.
[0052]
Устройство 1 управления транспортным средством обнаруживает неподвижный объект (такой как припаркованное транспортное средство 52) на дороге, по которой движется основное транспортное средство 50. Устройство 1 управления транспортным средством обнаруживает скорость основного транспортного средства 50. Устройство 1 управления транспортным средством обнаруживает позицию и скорость встречного транспортного средства 51, движущегося в направлении, противоположном направлению движения основного транспортного средства 50 на встречной полосе, прилегающей к полосе движения, в которой движется основное транспортное средство 50. Устройство 1 управления транспортным средством задает область (не обеспечивающую возможность разъезда область R), включающую в себя припаркованное транспортное средство 52 на дороге, определяемую вдоль направления прохождения дороги.
[0053]
Устройство 1 управления транспортным средством вычисляет позицию, в которой основное транспортное средство 50 и встречное транспортное средство 51 разъезжаются друг с другом, в соответствии со скоростью основного транспортного средства 50 и позицией и скоростью встречного транспортного средства 51. Устройство 1 управления транспортным средством вычисляет первый показатель s1, который является тем большим значением, чем выше скорость встречного транспортного средства 51. Устройство 1 управления транспортным средством вычисляет второй показатель s2, который является тем большим значением, чем выше скорость встречного транспортного средства 51. Устройство 1 управления транспортным средством объединяет первый показатель s1 и второй показатель s2 для вычисления объединенного показателя s. Устройство 1 управления транспортным средством побуждает основное транспортное средство 50 замедляться, когда объединенный показатель s больше или равен предопределенному значению, или побуждает основное транспортное средство поддерживать текущую скорость или ускоряться, когда объединенный показатель s меньше предопределенного значения, в случае, когда позиция разъезда имеется в пределах упомянутой области.
[0054]
Как описано выше, устройство 1 управления транспортным средством оценивает намерение водителя встречного транспортного средства 51 в соответствии с объединенным показателем s и определяет скорость основного транспортного средства 50 на основе оцениваемого намерения. Таким образом, устройство 1 управления транспортным средством может избежать внезапного торможения или ненужного ускорения, или замедления, соответственно.
[0055]
В то время как блок 23 вычисления первого показателя и блок 24 вычисления второго показателя могут вычислять первый показатель и второй показатель независимо от определения того, присутствует ли позиция P разъезда в пределах не обеспечивающей возможность разъезда области R, выполняемого блоком 22 вычисления позиции разъезда, первый показатель и второй показатель предпочтительно вычисляются только тогда, когда определено, что позиция P разъезда присутствует в пределах не обеспечивающей возможность разъезда области R. Это уменьшает вычислительную нагрузку по сравнению со случаем постоянного вычисления первого показателя и второго показателя.
[0056]
<Модифицированный Пример 1>
Далее ниже описан модифицированный пример 1 настоящего варианта осуществления.
[0057]
В модифицированном примере 1 блок 24 вычисления второго показателя умножает второй показатель на первый весовой коэффициент ω1, который является тем большим значением, чем ближе встречное транспортное средство 51 подъезжает к припаркованному транспортному средству 52. Этот весовой коэффициент ω1 описан ниже со ссылкой на Фиг. 8.
[0058]
Позиция, указываемая на оси абсцисс на графике, показанном на Фиг. 8, соответствует позиции встречного транспортного средства 51 по отношению к припаркованному транспортному средству 52. Ось абсцисс на графике, показанном на Фиг. 8, указывает, что позиция встречного транспортного средства 51 становится ближе к припаркованному транспортному средству 52, поскольку движение на графике осуществляется вправо. Позиция графика на оси абсцисс смещается вправо по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Ось ординат на графике указывает первый весовой коэффициент ω1. Как показано на Фиг. 8, первый весовой коэффициент ω1 становится большим по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Объединенный показатель s, когда второй показатель s2 умножается на первый весовой коэффициент ω1, определяется следующим уравнением (5):

[0059]
Цель умножения второго показателя на первый весовой коэффициент ω1 описана ниже. В случае оценки намерения водителя встречного транспортного средства 51 величина ускорения встречного транспортного средства 51 оказывает большее влияние на точность оценки, чем скорость, которая зависит от позиции встречного транспортного средства 51. Кроме того, подлежащая использованию величина ускорения встречного транспортного средства 51 оказывает большее влияние на точность оценки в позиции ближе к припаркованному транспортному средству 52, чем в позиции дальше от припаркованного транспортного средства 52. Это связано с тем, что вероятность того, что водитель встречного транспортного средства 51 намеревается проехать мимо припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50, увеличивается, когда величина ускорения встречного транспортного средства 51 увеличивается в близкой к припаркованному транспортному средству 52 позиции. Таким образом, блок 24 вычисления второго показателя умножает второй показатель на первый весовой коэффициент ω1, который является тем большим значением, чем ближе встречное транспортное средство 51 подъезжает к припаркованному транспортному средству 52. Это умножение увеличивает вклад второго показателя в объединенный показатель, когда встречное транспортное средство 51 находится в позиции, близкой к припаркованному транспортному средству 52. Использование объединенного показателя, вычисленного как описано выше, может оценивать намерение водителя встречного транспортного средства 51 с высокой точностью.
[0060]
Первый весовой коэффициент ω1 является небольшим значением, когда встречное транспортное средство 51 находится в удаленной от припаркованного транспортного средства 52 позиции. Умножение второго показателя на первый весовой коэффициент ω1 уменьшает вклад второго показателя в объединенный показатель, когда встречное транспортное средство 51 находится в удаленной от припаркованного транспортного средства 52 позиции. Таким образом, умножая второй показатель на первый весовой коэффициент ω1, можно управлять вкладом второго показателя в объединенный показатель.
[0061]
Как показано на Фиг. 8, степень увеличения первого весового коэффициента ω1 по отношению к изменению расстояния в направлении, согласно которому встречное транспортное средство 51 приближается к припаркованному транспортному средству 52, увеличивается по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Как описано выше величина ускорения встречного транспортного средства оказывает большее влияние на точность оценки в позиции ближе к припаркованному транспортному средству 52, чем в позиции дальше от припаркованного транспортного средства 52. Модифицированный пример 1 задает степень увеличения первого весового коэффициента ω1 большей по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Таким образом, вклад второго показателя в объединенный показатель увеличивается по мере того, как встречное транспортное средство 51 подъезжает ближе к припаркованному транспортному средству 52. Используя объединенный показатель как описано выше можно оценивать намерение водителя встречного транспортного средства 51 с высокой точностью.
[0062]
Контроллер 20 может задать первый весовой коэффициент ω1 способом, описанным ниже. Контроллер 20 может заранее сохранить в карте и подобном первый весовой коэффициент ω1, соответствующий позиции встречного транспортного средства 51 относительно припаркованного транспортного средства 52 (а именно, расстоянию между припаркованным транспортным средством 52 и встречным транспортным средством 51), и обратиться к позиции встречного транспортного средства 51 относительно припаркованного транспортного средства 52, обнаруженной датчиком 11, и карте, чтобы задать первый весовой коэффициент ω1.
[0063]
<Модифицированный Пример 2>
Далее ниже описан модифицированный пример 2 настоящего варианта осуществления.
[0064]
Модифицированный пример 1 проиллюстрирован выше со случаем, в котором блок 24 вычисления второго показателя умножает второй показатель на первый весовой коэффициент ω1. В дополнение к этому, в модифицированном примере 2 блок 23 вычисления первого показателя умножает первый показатель на второй весовой коэффициент ω2, который становится меньшим значением по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Этот весовой коэффициент ω2 описан ниже со ссылкой на Фиг. 9.
[0065]
Позиция, указываемая на оси абсцисс на графике, показанном на Фиг. 9, соответствует позиции встречного транспортного средства 51 по отношению к припаркованному транспортному средству 52, как и в случае Фиг. 8. Ось абсцисс на графике, показанном на Фиг. 9, указывает, что позиция встречного транспортного средства 51 становится ближе к припаркованному транспортному средству 52, поскольку движение на графике осуществляется вправо, как и в случае Фиг. 8. Позиция графика на оси абсцисс смещается вправо по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Ось ординат на графике указывает первый весовой коэффициент ω1 и второй весовой коэффициент ω2. Как показано на Фиг. 9, второй весовой коэффициент ω2 становится меньшим значением по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Объединенный показатель s, когда первый показатель s1 умножается на второй весовой коэффициент ω2, определяется следующим уравнением (6):

[0066]
В модифицированном примере 2 вклад второго показателя в объединенный показатель увеличивается, когда встречное транспортное средство 51 находится в позиции ближе к припаркованному транспортному средству 52, а вклад первого показателя в объединенный показатель увеличивается, когда встречное транспортное средство 51 находится в позиции дальше от припаркованного транспортного средства 52. Таким образом, устройство 1 управления транспортным средством согласно модифицированному примеру 2 использует первый весовой коэффициент ω1 и весовой коэффициент ω2 для управления вкладом первого показателя и второго показателя в объединенный показатель.
[0067]
Как показано на Фиг. 9, степень уменьшения второго весового коэффициента ω2 по отношению к изменению расстояния в направлении, согласно которому встречное транспортное средство 51 приближается к припаркованному транспортному средству 52, увеличивается по мере приближения встречного транспортного средства 51 к припаркованному транспортному средству 52. Вклад первого показателя в объединенный показатель относительно уменьшается, а вклад второго показателя в объединенный показатель относительно увеличивается по мере того, как встречное транспортное средство 51 перемещается в позицию ближе к припаркованному транспортному средству 52. Используя объединенный показатель как описано выше можно оценивать намерение водителя встречного транспортного средства 51 с высокой точностью.
[0068]
Второй весовой коэффициент ω2 может быть задан тем же способом, что и первый весовой коэффициент ω1. Контроллер 20 может заранее сохранить в карте и подобном второй весовой коэффициент ω2, соответствующий позиции встречного транспортного средства 51 относительно припаркованного транспортного средства 52 (а именно, расстоянию между припаркованным транспортным средством 52 и встречным транспортным средством 51), и обратиться к позиции встречного транспортного средства 51 относительно припаркованного транспортного средства 52, обнаруживаемой датчиком 11, и карте, чтобы задать второй весовой коэффициент ω2.
[0069]
Сумма первого весового коэффициента ω1 и весового коэффициента ω2 может быть постоянным значением. Задание одного из первого весового коэффициента ω1 и второго весового коэффициента ω2, когда сумма задается равной постоянному значению, может автоматически приводить к другому коэффициенту. Это может снизить вычислительные затраты при задании соответствующих весовых коэффициентов по сравнению со случаем, в котором первый весовой коэффициент ω1 и второй весовой коэффициент ω2 задаются независимо друг от друга.
[0070]
<Модифицированный Пример 3>
Далее ниже описан модифицированный пример 3 настоящего варианта осуществления.
[0071]
В модифицированном примере 3 задается пороговое значение скорости, которое является тем большим значением, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51, а затем вычисляется первый показатель в соответствии с разностью между скоростью встречного транспортного средства 51 и пороговым значением скорости.
[0072]
Это пороговое значение скорости описано ниже со ссылкой на Фиг. 10. Как показано на Фиг. 10, контроллер 20 генерирует профиль скорости, который, как предполагается, приводит к остановке встречного транспортного средства 51 перед припаркованным транспортным средством 52 после начала замедления с постоянной величиной замедления из некоторой позиции (которой может быть текущая позиция) встречного транспортного средства 51. Скорость относительно профиля скорости тем больше, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51.
[0073]
Контроллер 20 задает пороговое значение скорости с использованием сгенерированного профиля скорости. В частности, как показано на Фиг. 11, контроллер 20 задает скорость относительно профиля скорости в качестве порогового значения скорости, соответствующего позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние (расстояние L2). Заданное пороговое значение скорости в примере, проиллюстрированном на Фиг. 11, равняется V3. Фиг. 12 иллюстрирует другой пример, в котором контроллер 20 задает скорость относительно профиля скорости в качестве порогового значения скорости, соответствующего позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние (расстояние L3). Заданное пороговое значение скорости в примере, проиллюстрированном на Фиг. 12, равняется V4. Примеры, описанные выше, удовлетворяют соотношениям L2 > L3 и V3 > V4. Таким образом пороговое значение скорости тем больше, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51.
[0074]
Контроллер 20 вычисляет разность между пороговым значением скорости и скоростью встречного транспортного средства 51. В примере, проиллюстрированном на Фиг. 11, в случае, когда позиция Р разъезда присутствует в пределах не обеспечивающей возможность разъезда области R, контроллер 20 вычисляет разность между пороговым значением V3 скорости, соответствующим позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на расстояние L2, и скоростью встречного транспортного средства 51, соответствующей позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на расстояние L2.
[0075]
Блок 23 вычисления первого показателя вычисляет первый показатель, который является тем большим значением, чем скорость vt встречного транспортного средства 51, соответствующая позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на расстояние L2, больше порогового значения V3 скорости, соответствующего позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на расстояние L2. Первый показатель s1 задается следующим уравнением (7):

где vk является пороговым значением скорости общего назначения.
[0076]
Высока вероятность того, что водитель встречного транспортного средства 51 попытается проехать у припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50, когда скорость встречного транспортного средства 51 превышает пороговое значение скорости. Вычисление первого показателя согласно уравнению (7) для использования вычисленного первого показателя может оценить намерение водителя встречного транспортного средства 51 с высокой точностью. Таким образом, устройство 1 управления транспортным средством согласно модифицированному примеру 3 оценивает намерение водителя встречного транспортного средства 51 с использованием первого показателя, вычисленного в соответствии с разностью между скоростью встречного транспортного средства 51 и пороговым значением скорости, и определяет скорость основного транспортного средства 50 на основе полученного оценкой намерения. Таким образом, устройство 1 управления транспортным средством может избежать внезапного торможения или ненужного ускорения, или замедления, соответственно.
[0077]
Другой пример способа вычисления первого показателя на основе сравнения между скоростью встречного транспортного средства 51 и пороговым значением скорости описан ниже со ссылкой на Фиг. 13. Как показано на Фиг. 13 контроллер 20 задает пороговое значение скорости, в качестве первого порогового значения Vth1 скорости, которое является тем большим значением, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51. Затем контроллер 20 сравнивает первое пороговое значение Vth1 скорости, соответствующее позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние, со скоростью встречного транспортного средства 51, соответствующей позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние.
[0078]
Как показано на Фиг. 13, когда скорость встречного транспортного средства 51 больше или равна первому пороговому значению Vth1 скорости, блок 23 вычисления первого показателя вычисляет первый показатель равным 1. Когда скорость встречного транспортного средства 51 меньше первого порогового значения Vth1 скорости, блок 23 вычисления первого показателя вычисляет первый показатель равным 0. Пример, показанный на Фиг. 13, проиллюстрирован случаем, в котором первый показатель является двоичным. Как описано выше, когда скорость встречного транспортного средства 51 больше или равна первому пороговому значению Vth1 скорости, высока вероятность того, что водитель встречного транспортного средства 51 пытается проехать у припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50. Вычисление первого показателя и использование вычисленного первого показателя таким образом может оценить намерение водителя встречного транспортного средства 51 с высокой точностью.
[0079]
Первый показатель может быть троичным. Как показано на Фиг. 14, контроллер 20 может задать второе пороговое значение Vth2 скорости меньшим, чем первое пороговое значение Vth1 скорости, и сравнить эти пороговые значения со скоростью встречного транспортного средства 51. Как показано на Фиг. 14, когда скорость встречного транспортного средства 51 больше или равна первому пороговому значению Vth1 скорости, блок 23 вычисления первого показателя вычисляет первый показатель равным 1. Когда скорость встречного транспортного средства 51 меньше первого порогового значения Vth1 скорости и больше или равна второму пороговому значению Vth2 скорости, блок 23 вычисления первого показателя вычисляет первый показатель равным 0. Когда скорость встречного транспортного средства 51 меньше второго порогового значения Vth2 скорости, блок 23 вычисления первого показателя вычисляет первый показатель равным -1. Высока вероятность того, что водитель встречного транспортного средства 51 ожидает проезда основного транспортного средства 50, когда скорость встречного транспортного средства 51 меньше второго порогового значения Vth2 скорости. Вычисление первого показателя и использование вычисленного первого показателя таким образом может оценить намерение водителя встречного транспортного средства 51 с высокой точностью.
[0080]
<Модифицированный Пример 4>
Далее ниже описан модифицированный пример 4 настоящего варианта осуществления.
[0081]
В модифицированном примере 4 задается пороговое значение величины ускорения, которое является тем большим значением, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51, а затем вычисляется второй показатель в соответствии с разностью между величиной ускорения встречного транспортного средства 51 и пороговым значением величины ускорения.
[0082]
Это пороговое значение величины ускорения описано ниже со ссылкой на Фиг. 15. Как показано на Фиг. 15, контроллер 20 генерирует профиль величины ускорения (который представляет собой величину замедления и является профилем отрицательного ускорения), который, как предполагается, приведет встречное транспортное средство 51 к остановке перед припаркованным транспортным средством 52 в определенной позиции (которой может быть текущая позиция) встречного транспортного средства 51. Величина ускорения относительно профиля величины ускорения тем выше, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51. Величина ускорения относительно профиля величины ускорения может быть получена с помощью экспериментов или моделирований. Ось ординат на графике, показанном на Фиг. 15, указывает величину ускорения, которая увеличивается по мере движения на графике в верхнем направлении, то есть в положительном направлении. Величина ускорения в профиле величины ускорения, показанном на Фиг. 15, представляет собой величину отрицательного ускорения (величину замедления) и, таким образом, она становится меньшей (что указывает большую величину замедления) по мере движения на графике в нижнем направлении. Следующие пояснения приведены для случая, в котором величина ускорения в направлении движения встречного транспортного средства 51 относится к величине положительного ускорения, а величина ускорения в направлении, противоположном направлению движения встречного транспортного средства 51 (а именно, величина замедления) относится к величине отрицательного ускорения. Фраза «величина ускорения является большой», как она используется в данном документе, относится к случаю, в котором величина ускорения является большой в положительном направлении.
[0083]
Контроллер 20 задает пороговое значение величины ускорения с использованием сгенерированного профиля величины ускорения. Способ задания порогового значения величины ускорения аналогичен способу задания порогового значения скорости, описанному выше. Контроллер 20 вычисляет разность между пороговым значением величины ускорения, соответствующим позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние, и величиной ускорения встречного транспортного средства 51, соответствующей позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние.
[0084]
Блок 24 вычисления второго показателя вычисляет второй показатель, который является тем большим значением, чем величина at ускорения встречного транспортного средства 51, соответствующая позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние, больше порогового значения величины ускорения, соответствующего позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние. Второй показатель s2 задается следующим уравнением (8):

где ak является пороговым значением величины ускорения общего назначения.
[0085]
Высока вероятность того, что водитель встречного транспортного средства 51 попытается проехать у припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50, когда величина ускорения встречного транспортного средства 51 превышает пороговое значение величины ускорения. Вычисление второго показателя согласно уравнению (8) для использования вычисленного второго показателя может оценить намерение водителя встречного транспортного средства 51 с высокой точностью. Таким образом устройство 1 управления транспортным средством согласно модифицированному примеру 4 оценивает намерение водителя встречного транспортного средства 51 посредством использования второго показателя, вычисленного в соответствии с разностью между величиной ускорения встречного транспортного средства 51 и пороговым значением величины ускорения, и определяет скорость основного транспортного средства 50 на основе полученного оценкой намерения. Таким образом, устройство 1 управления транспортным средством может избежать внезапного торможения или ненужного ускорения, или замедления, соответственно.
[0086]
Другой пример способа вычисления второго показателя на основе сравнения между величиной ускорения встречного транспортного средства 51 и пороговым значением величины ускорения описан ниже со ссылкой на Фиг. 16. Как показано на Фиг. 16 контроллер 20 задает пороговое значение величины ускорения, в качестве первого порогового значения ACCth1 величины ускорения, которое является тем большим значением, чем больше расстояние между припаркованным транспортным средством 52 и встречным транспортным средством 51. Затем контроллер 20 сравнивает первое пороговое значение ACCth1 величины ускорения, соответствующее позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние, с величиной ускорения встречного транспортного средства 51, соответствующей позиции встречного транспортного средства 51, удаленной от припаркованного транспортного средства 52 на предопределенное расстояние.
[0087]
Как показано на Фиг. 16, когда величина ускорения встречного транспортного средства 51 больше или равна первому пороговому значению ACCth1 величины ускорения, блок 24 вычисления второго показателя вычисляет второй показатель равным 1. Когда величина ускорения встречного транспортного средства 51 меньше первого порогового значения ACCth1 величины ускорения, блок 24 вычисления второго показателя вычисляет второй показатель равным 0. Пример, показанный на Фиг. 16, проиллюстрирован случаем, в котором второй показатель является двоичным. Как описано выше, когда величина ускорения встречного транспортного средства 51 больше или равна первому пороговому значению ACCth1 величины ускорения, высока вероятность того, что водитель встречного транспортного средства 51 попытается проехать у припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50. Вычисление второго показателя и использование вычисленного второго показателя таким образом может оценивать намерение водителя встречного транспортного средства 51 с высокой точностью.
[0088]
Второй показатель может быть троичным. Как показано на Фиг. 17, контроллер 20 может задавать второе пороговое значение ACCth2 величины ускорения меньшим, чем первое пороговое значение ACCth1 величины ускорения, и сравнивать эти пороговые значения с величиной ускорения встречного транспортного средства 51. Как показано на Фиг. 17, когда величина ускорения встречного транспортного средства 51 больше или равна первому пороговому значению ACCth1 величины ускорения, блок 24 вычисления второго показателя вычисляет второй показатель равным 1. Когда величина ускорения встречного транспортного средства 51 меньше первого порогового значения ACCth1 величины ускорения и больше или равна второму пороговому значению ACCth2 величины ускорения, блок 24 вычисления второго показателя вычисляет второй показатель равным 0. Когда величина ускорения встречного транспортного средства 51 меньше второго порогового значения ACCth2 величины ускорения, блок 24 вычисления второго показателя вычисляет второй показатель равным -1. Высока вероятность того, что водитель встречного транспортного средства 51 ожидает проезда основного транспортного средства 50, когда величина ускорения встречного транспортного средства 51 меньше второго порогового значения ACCth2 величины ускорения. Вычисление второго показателя и использование вычисленного второго показателя таким образом может оценивать намерение водителя встречного транспортного средства 51 с высокой точностью.
[0089]
<Модифицированный Пример 5>
Далее ниже описан модифицированный пример 5 настоящего варианта осуществления.
[0090]
В модифицированном примере 5 допустимый предел задается для порогового значения скорости, описанного в модифицированном примере 3. Этот допустимый предел, задаваемый для порогового значения скорости, описан ниже со ссылкой на Фиг. 18.
[0091]
Как проиллюстрировано на Фиг. 18, контроллер 20 задает каждое из верхнего предельного значения и нижнего предельного значения в качестве допустимого предела для порогового значения скорости. Верхнее предельное значение задается равным значению с допустимым пределом +10% по отношению к пороговому значению скорости. Аналогично, нижнее предельное значение задается равным значению с допустимым пределом -10% по отношению к пороговому значению скорости. Соответствующие значения допустимых пределов +10% и -10% могут быть изменены надлежащим образом.
[0092]
Блок 23 вычисления первого показателя вычисляет первый показатель равным 1, когда скорость встречного транспортного средства 51 больше верхнего предельного значения порогового значения скорости. Блок 23 вычисления первого показателя вычисляет первый показатель равным 0, когда скорость встречного транспортного средства 51 больше или равна верхнему предельному значению порогового значения скорости и меньше или равна нижнему предельному значению порогового значения скорости. Блок 23 вычисления первого показателя вычисляет первый показатель равным -1, когда скорость встречного транспортного средства 51 меньше нижнего предельного значения порогового значения скорости. Задавая верхнее предельное значение и нижнее предельное значение для порогового значения скорости для сравнения со скоростью встречного транспортного средства 51, можно более точно оценивать намерение водителя встречного транспортного средства 51.
[0093]
Допустимый предел также может быть задан для порогового значения величины ускорения, описанного в модифицированном примере 4. Способ задания аналогичен способу задания в случае порогового значения скорости. Блок 24 вычисления второго показателя вычисляет второй показатель равным 1, когда величина ускорения встречного транспортного средства 51 больше верхнего предельного значения порогового значения величины ускорения. Блок 24 вычисления второго показателя вычисляет второй показатель равным 0, когда величина ускорения встречного транспортного средства 51 меньше или равна верхнему предельному значению порогового значения величины ускорения и больше или равна нижнему предельному значению порогового значения величины ускорения. Блок 24 вычисления второго показателя вычисляет второй показатель равным -1, когда величина ускорения встречного транспортного средства 51 меньше нижнего предельного значения порогового значения величины ускорения. Задавая верхнее предельное значение и нижнее предельное значение для порогового значения величины ускорения для сравнения с величиной ускорения встречного транспортного средства 51, можно более точно оценивать намерение водителя встречного транспортного средства 51.
[0094]
<Модифицированный Пример 6>
Далее ниже описан модифицированный пример 6 настоящего варианта осуществления.
[0095]
В модифицированном примере 6 объединенный показатель умножается на коэффициент, соответствующий ширине (ширине транспортного средства) припаркованного транспортного средства 52. Коэффициент, соответствующий ширине транспортного средства собственно припаркованного транспортного средства 52, описан ниже со ссылкой на Фиг. 19.
[0096]
Как показано на Фиг. 19, блок 25 вычисления объединенного показателя умножает объединенный показатель на коэффициент, соответствующий ширине W3 транспортного средства собственно припаркованного транспортного средства 52, чтобы вычислить окончательный объединенный показатель. Ширина W3 транспортного средства собственно припаркованного транспортного средства 52 получается датчиком 11. Например коэффициент задают так, чтобы он уменьшался по мере увеличения ширины W3 транспортного средства собственно припаркованного транспортного средства 52. Окончательный объединенный показатель s задается следующим уравнением (9):

где k - упомянутый коэффициент.
[0097]
Водитель встречного транспортного средства 51 должен выехать на полосу движения основного транспортного средства 50 более значительно, чтобы объехать припаркованное транспортное средство 52, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является большей. Кроме того, водителю встречного транспортного средства 51 труднее наблюдать за стороной впереди, чтобы распознать количество припаркованных транспортных средств, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является большей. Высока вероятность того, что водитель встречного транспортного средства 51 ожидает проезда основного транспортного средства 50, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является большей. Использование объединенного показателя, умножаемого на коэффициент, соответствующий ширине транспортного средства собственно припаркованного транспортного средства 52, позволяет с высокой точностью оценить намерение водителя встречного транспортного средства 51.
[0098]
Коэффициент k может быть задан меньшим единицы, когда ширина W3 транспортного средства собственно припаркованного транспортного средства 52 больше или равна предопределенному значению. Использование объединенного показателя, основанного на ширине W3 транспортного средства собственно припаркованного транспортного средства 52, позволяет оценить намерение водителя встречного транспортного средства 51 с высокой точностью.
[0099]
Коэффициент k может быть задан большим или равным единице, когда ширина W3 транспортного средства собственно припаркованного транспортного средства 52 меньше предопределенного значения. Как описано выше, водитель встречного транспортного средства 51 должен выехать на полосу движения более значительно, чтобы объехать припаркованное транспортное средство 52, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является большей. Кроме того, водителю встречного транспортного средства 51 труднее наблюдать за стороной впереди, чтобы распознать количество припаркованных транспортных средств, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является большей. Другими словами, часть встречного транспортного средства 51, выступающая на полосу движения, уменьшается, и водитель встречного транспортного средства 51 может видеть сторону впереди, чтобы легче распознавать количество припаркованных транспортных средств, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является меньшей. Таким образом, высока вероятность того, что водитель встречного транспортного средства 51 попытается проехать у припаркованного транспортного средства 52, не дожидаясь основного транспортного средства 50, поскольку ширина W3 транспортного средства собственно припаркованного транспортного средства 52 является меньшей. Затем устройство 1 управления транспортным средством может умножать объединенный показатель на коэффициент k, больший или равный единице, когда ширина W3 транспортного средства собственно припаркованного транспортного средства 52 меньше предопределенного значения. Таким образом, использование объединенного показателя, основанного на ширине W3 транспортного средства собственно припаркованного транспортного средства 52, позволяет оценить намерение водителя встречного транспортного средства 51 с высокой точностью.
[0100]
Когда неподвижный объект не является припаркованным транспортным средством 52, а представляет собой упавший объект или пилон, ширина неподвижного объекта относится к ширине неподвижного объекта в направлении ширины дороги.
[0101]
Соответствующие функции, описанные в варианте осуществления, могут быть реализованы в одной или множестве схем обработки. Соответствующие схемы обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Соответствующие схемы обработки также включают в себя специализированную интегральную схему (ASIC), выполненную с возможностью исполнения функций, описанных выше, а также устройство, такое как схемный компонент.
[0102]
Хотя настоящее изобретение было описано выше со ссылкой на определенный вариант осуществления, следует понимать, что настоящее изобретение не следует ограничивать приведенным описанием и чертежами, составляющими часть данного раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники согласно данному раскрытию.
[0103]
Например, настоящий вариант осуществления был проиллюстрирован выше для случая прямой дороги, но может также применяться для случая изогнутой дороги.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0104]
1 УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
10 GPS-ПРИЕМНИК
11 ДАТЧИК
12 БАЗА КАРТОГРАФИЧЕСКИХ ДАННЫХ
20 КОНТРОЛЛЕР
21 БЛОК ЗАДАНИЯ НЕ ОБЕСПЕЧИВАЮЩЕЙ ВОЗМОЖНОСТЬ РАЗЪЕЗДА ОБЛАСТИ
22 БЛОК ВЫЧИСЛЕНИЯ ПОЗИЦИИ РАЗЪЕЗДА
23 БЛОК ВЫЧИСЛЕНИЯ ПЕРВОГО ПОКАЗАТЕЛЯ
24 БЛОК ВЫЧИСЛЕНИЯ ВТОРОГО ПОКАЗАТЕЛЯ
25 БЛОК ВЫЧИСЛЕНИЯ ОБЪЕДИНЕННОГО ПОКАЗАТЕЛЯ
26 БЛОК ОПРЕДЕЛЕНИЯ СКОРОСТИ
27 БЛОК УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
30 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
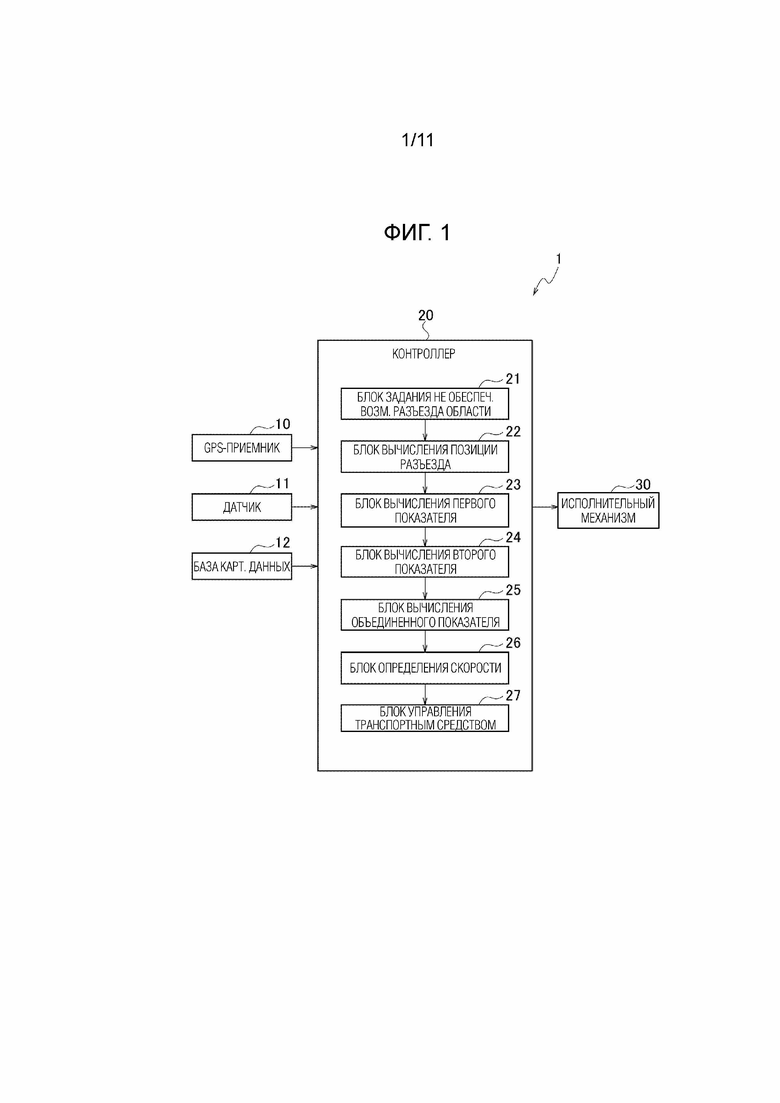
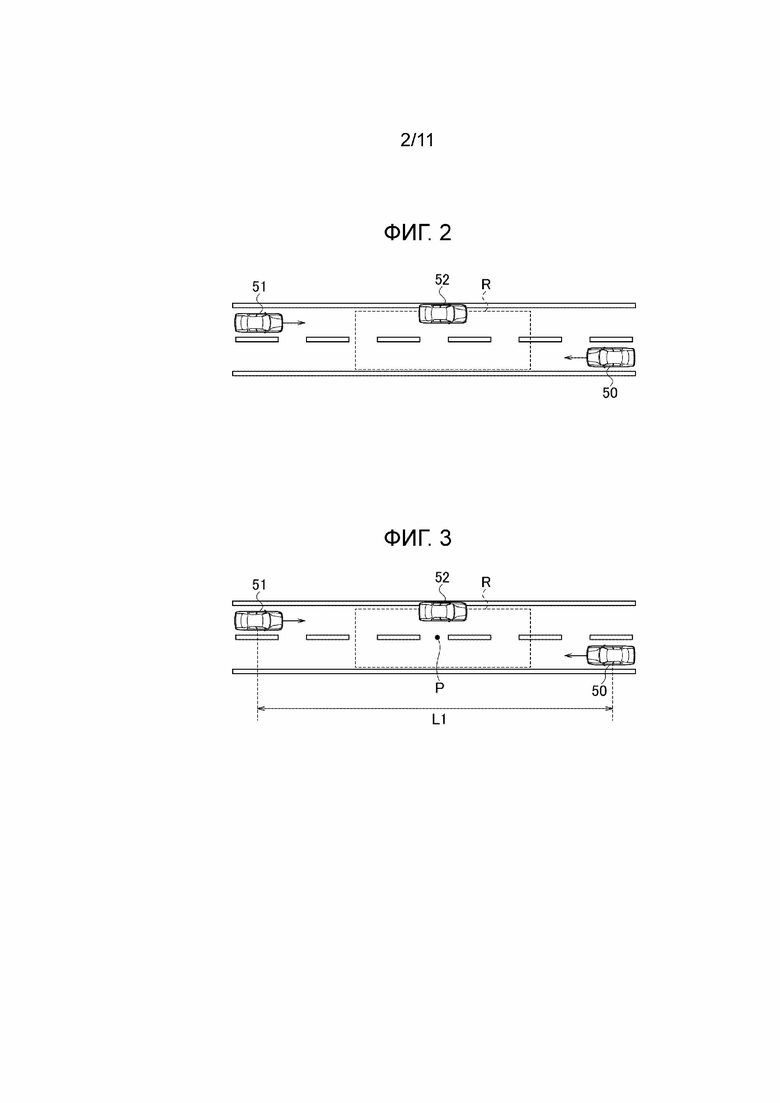
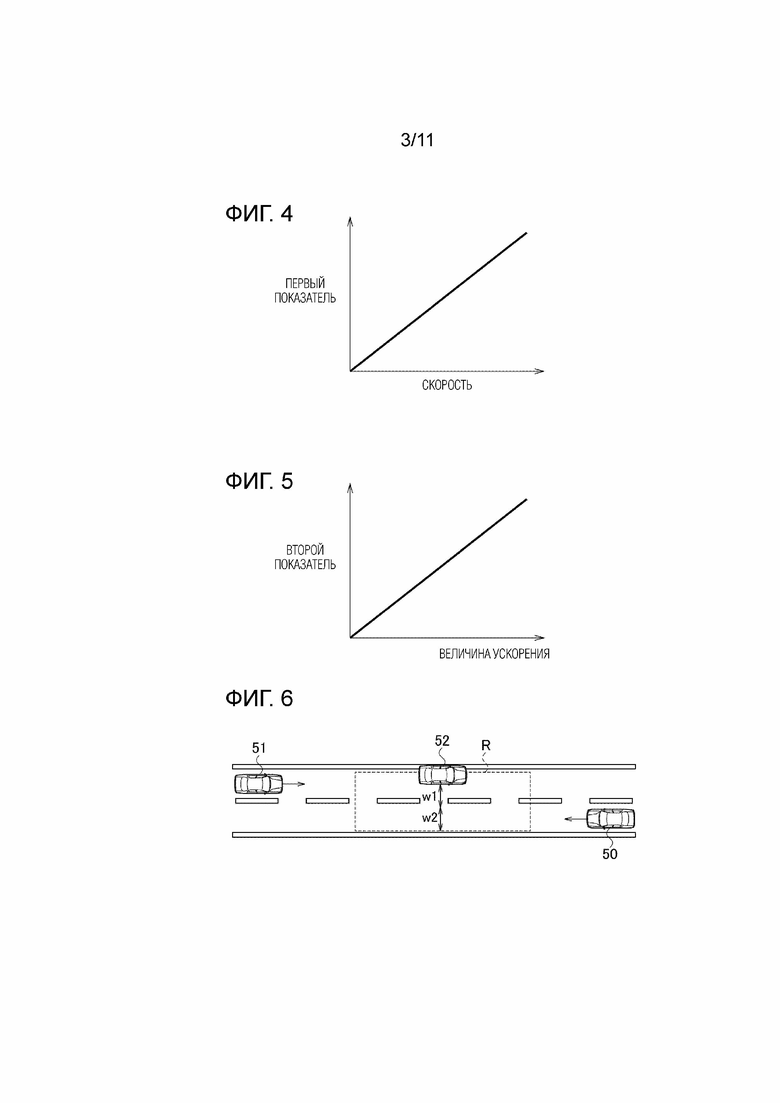
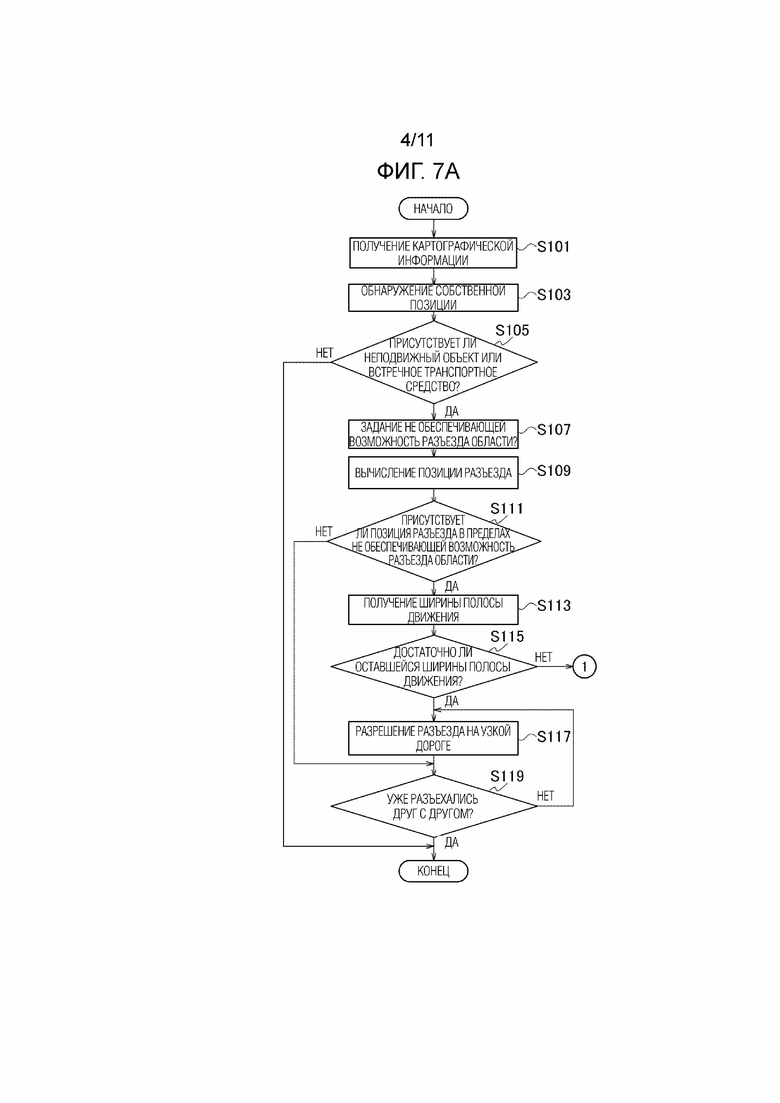
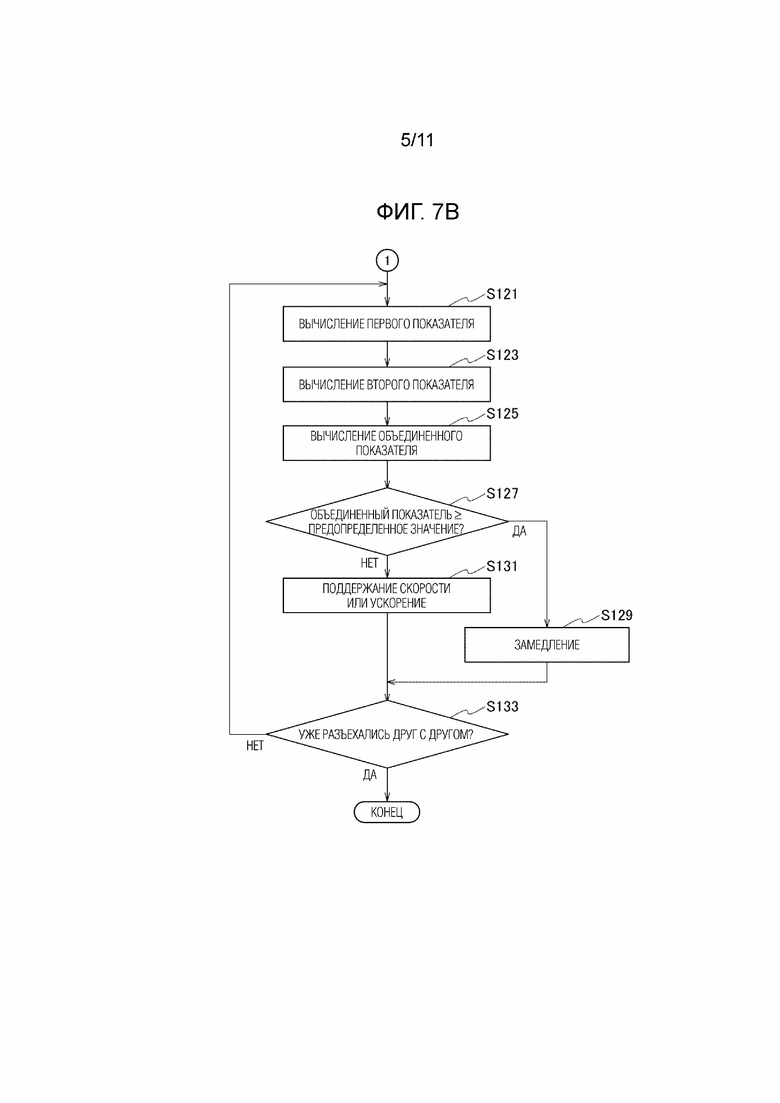
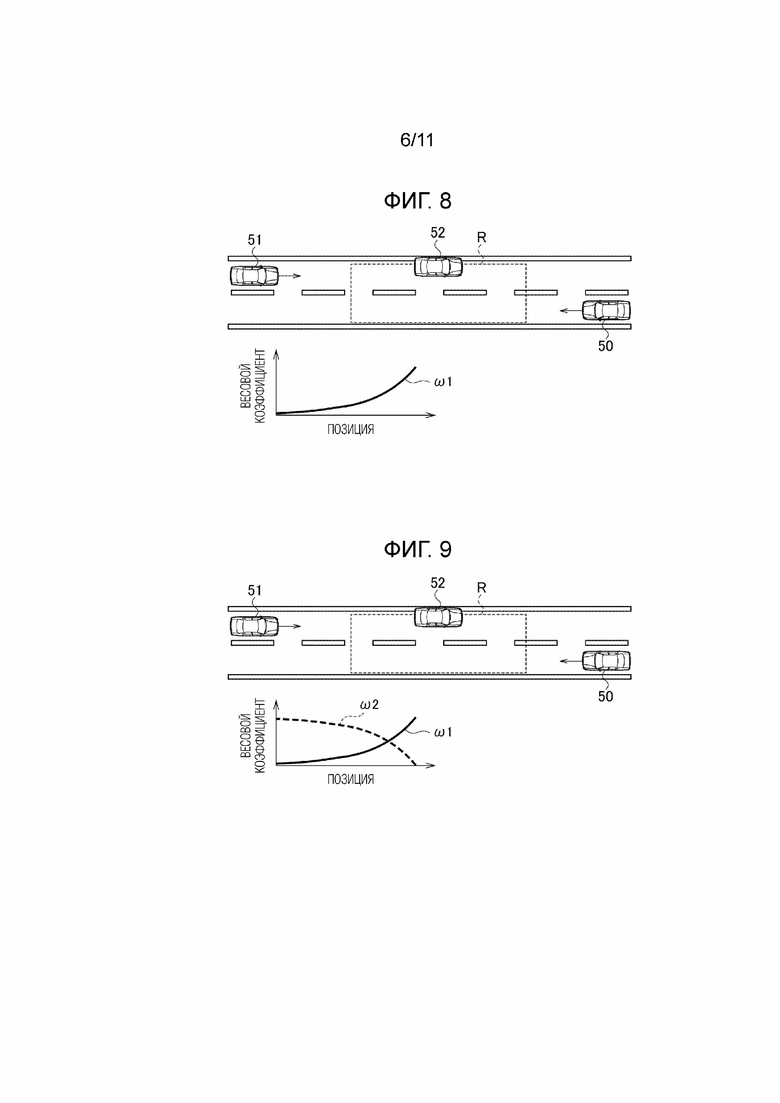
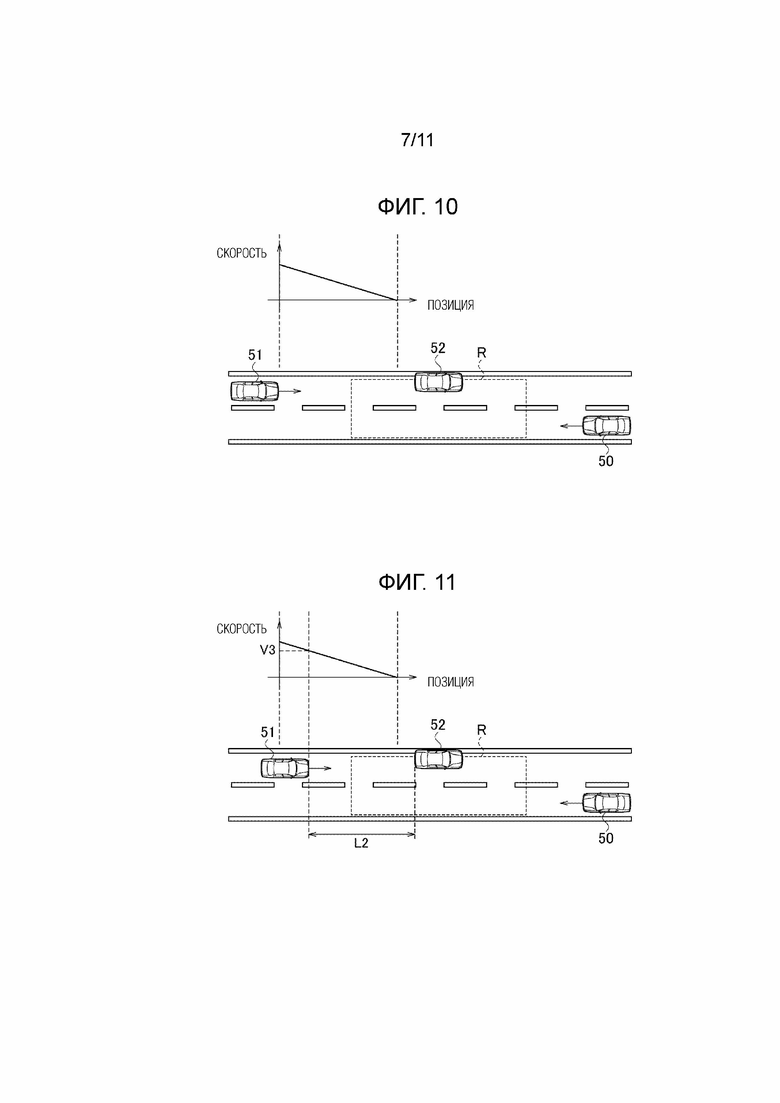
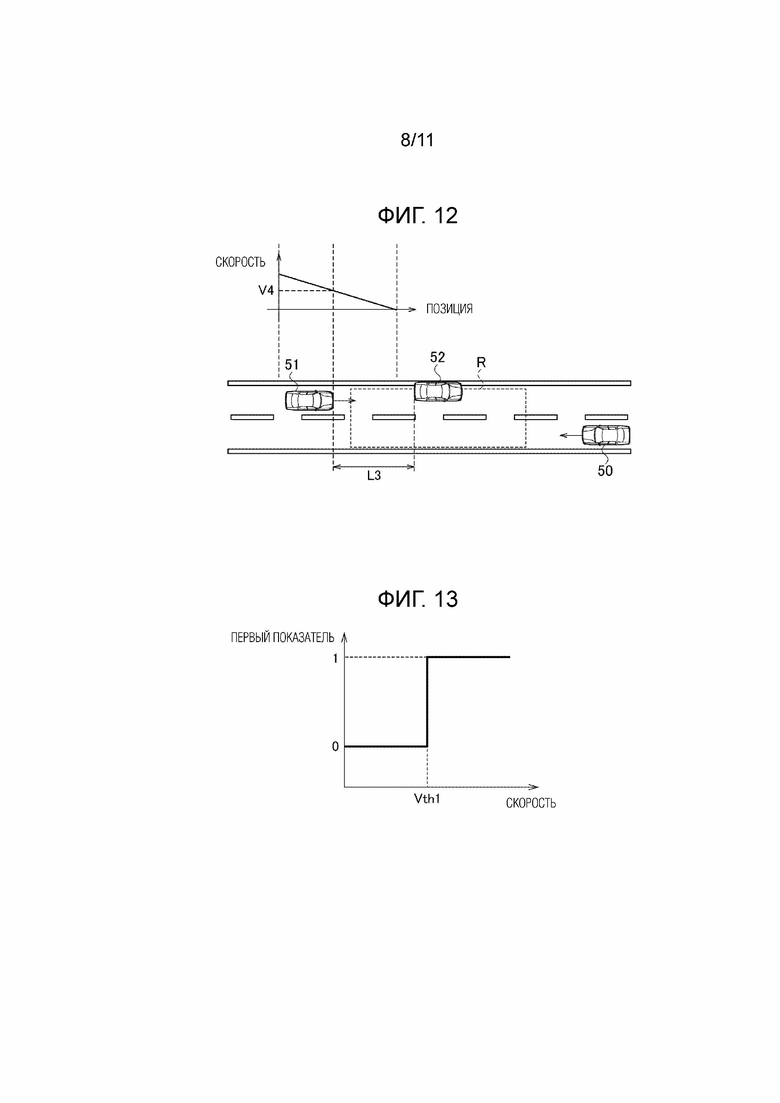
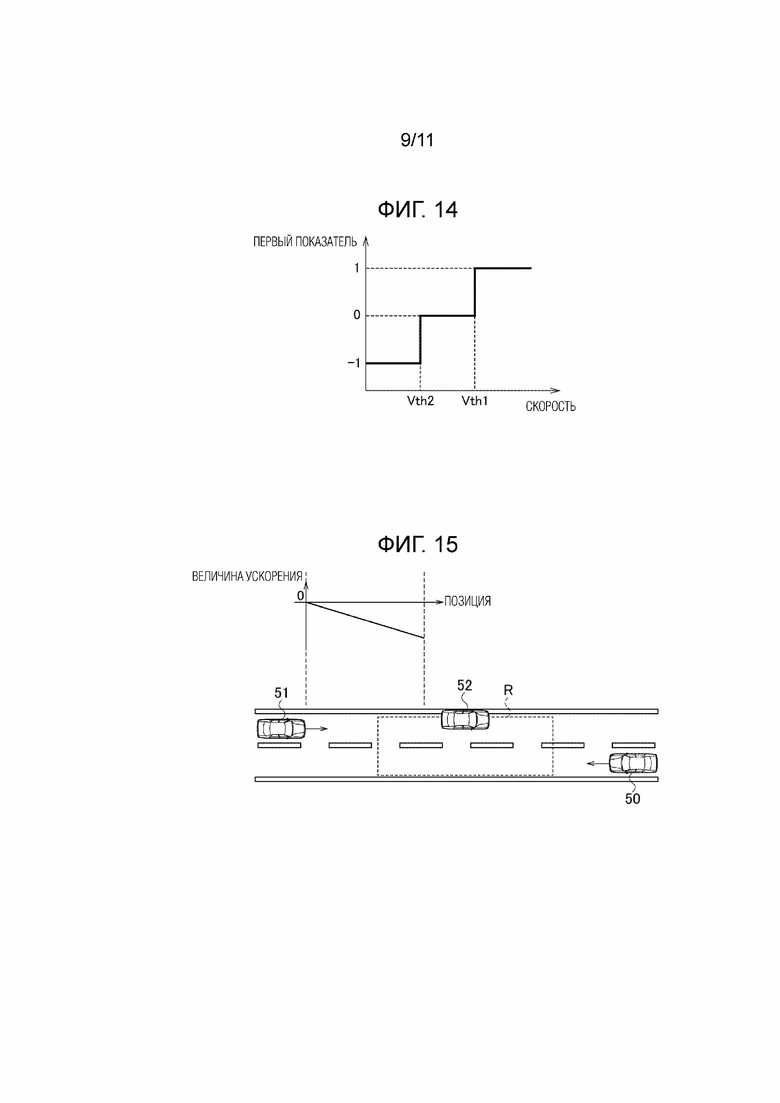
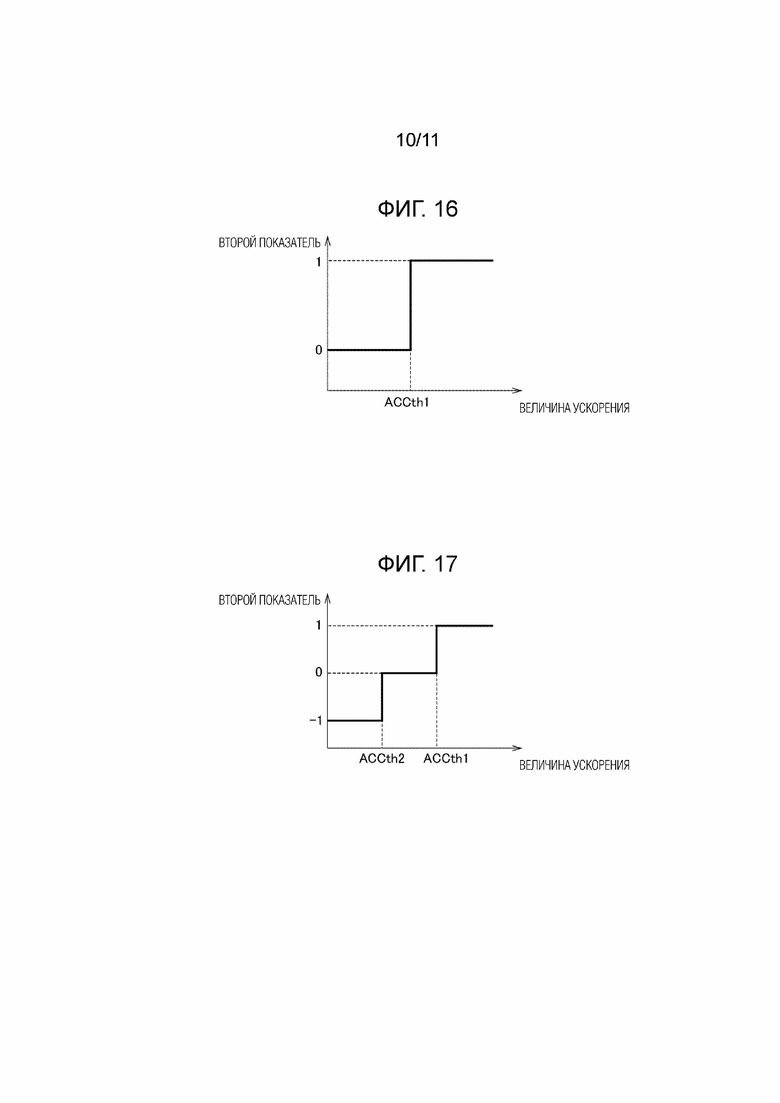
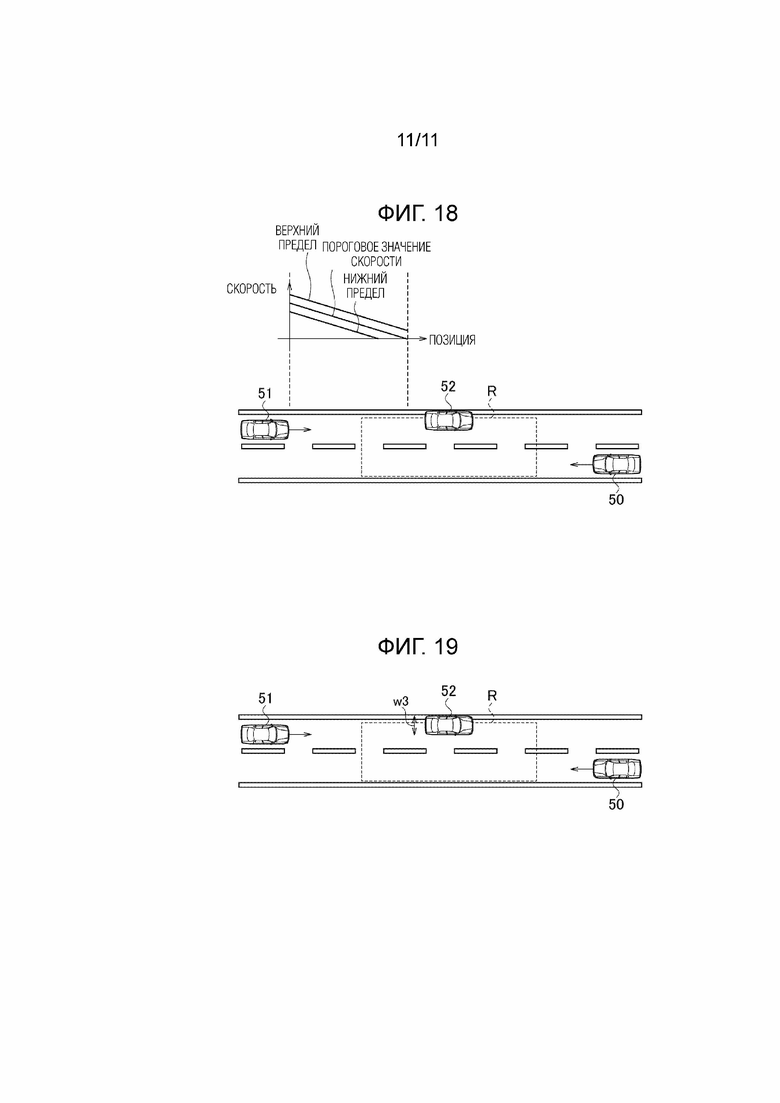
Изобретение относится к транспортным средствам. В способе управления транспортным средством обнаруживают позицию неподвижного объекта на дороге, по которой движется основное транспортное средство; обнаруживают скорость основного транспортного средства и позицию и скорость встречного транспортного средства. Задают область, включающую в себя неподвижный объект на дороге. Вычисляют позицию разъезда основного и встречного транспортного средства. Вычисляют первый и второй показатели, связанные со скоростью и ускорением встречного транспортного средства, и объединяют эти показатели. Побуждают основное транспортное средство замедляться, когда объединенный показатель больше или равен предопределенному значению, или ускоряться, когда показатель меньше предопределенного значения, в случае, когда позиция разъезда имеется в пределах упомянутой области. Таким образом, учитывается намерение водителя встречного транспортного средства. 2 н. и 16 з.п. ф-лы, 19 ил.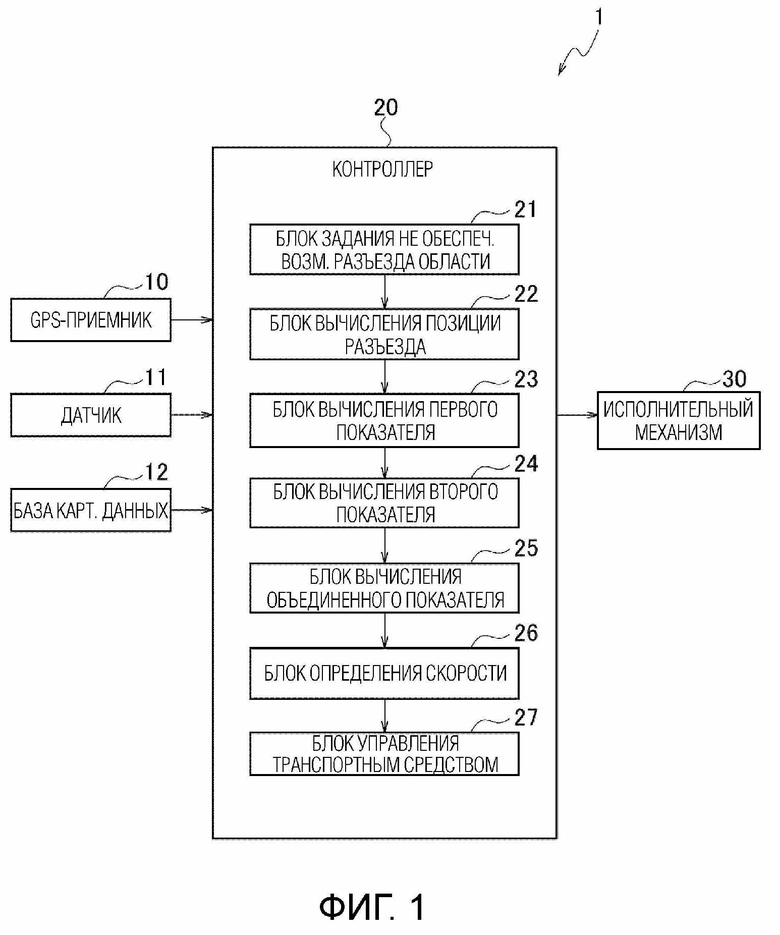
1. Способ управления транспортным средством, содержащий:
обнаружение позиции неподвижного объекта на дороге, по которой движется основное транспортное средство;
обнаружение скорости основного транспортного средства;
обнаружение позиции и скорости встречного транспортного средства, движущегося в направлении, противоположном направлению движения основного транспортного средства на встречной полосе, прилегающей к полосе движения, в которой движется основное транспортное средство;
задание области, включающей в себя неподвижный объект на дороге, определяемой в пределах предопределенного расстояния от неподвижного объекта вдоль направления прохождения дороги;
вычисление позиции разъезда, в которой основное транспортное средство и встречное транспортное средство разъезжаются друг с другом, в соответствии со скоростью основного транспортного средства, а также позицией и скоростью встречного транспортного средства;
вычисление первого показателя, который является тем большим значением, чем выше скорость встречного транспортного средства;
вычисление второго показателя, который является тем большим значением, чем выше величина ускорения встречного транспортного средства;
объединение первого показателя со вторым показателем таким образом, чтобы вычислить объединенный показатель; и
побуждение основного транспортного средства замедляться, когда объединенный показатель больше или равен предопределенному значению, или побуждение основного транспортного средства поддерживать скорость или ускоряться, когда объединенный показатель меньше предопределенного значения, в случае, когда упомянутая позиция разъезда имеется в пределах упомянутой области.
2. Способ управления транспортным средством по п. 1, в котором второй показатель умножается на первый весовой коэффициент, который является тем большим значением, чем ближе встречное транспортное средство продвигается к неподвижному объекту.
3. Способ управления транспортным средством по п. 2, в котором степень увеличения первого весового коэффициента по отношению к изменению расстояния в направлении, в котором встречное транспортное средство приближается к неподвижному объекту, увеличивается по мере приближения встречного транспортного средства к неподвижному объекту.
4. Способ управления транспортным средством по п. 2 или 3, в котором первый показатель умножается на второй весовой коэффициент, который является тем меньшим значением, чем ближе встречное транспортное средство продвигается к неподвижному объекту.
5. Способ управления транспортным средством по п. 4, в котором степень уменьшения второго весового коэффициента по отношению к изменению расстояния в направлении, в котором встречное транспортное средство приближается к неподвижному объекту, увеличивается по мере приближения встречного транспортного средства к неподвижному объекту.
6. Способ управления транспортным средством по п. 4 или 5, в котором сумма первого весового коэффициента и второго весового коэффициента является постоянным значением.
7. Способ управления транспортным средством по любому из пп. 1-6, в котором:
задают пороговое значение скорости тем большим значением, чем больше расстояние между неподвижным объектом и встречным транспортным средством; и
первый показатель вычисляется в соответствии с разностью между скоростью встречного транспортного средства и пороговым значением скорости.
8. Способ управления транспортным средством по любому из пп. 1-6, в котором:
задают пороговое значение скорости как первое пороговое значение скорости, которое является тем большим значением, чем больше расстояние между неподвижным объектом и встречным транспортным средством;
первый показатель вычисляется равным 1, когда скорость встречного транспортного средства больше или равна первому пороговому значению скорости; и
первый показатель вычисляется равным 0, когда скорость встречного транспортного средства меньше первого порогового значения скорости.
9. Способ управления транспортным средством по п. 8, в котором:
задают второе пороговое значение скорости, которое меньше, чем упомянутое первое пороговое значение скорости;
первый показатель вычисляется равным 1, когда скорость встречного транспортного средства больше или равна первому пороговому значению скорости;
первый показатель вычисляется равным 0, когда скорость встречного транспортного средства меньше первого порогового значения скорости и больше или равна второму пороговому значению скорости; и
первый показатель вычисляется равным -1, когда скорость встречного транспортного средства меньше второго порогового значения скорости.
10. Способ управления транспортным средством по любому из пп. 1-6, в котором:
задают пороговое значение величины ускорения тем большим значением, чем больше расстояние между неподвижным объектом и встречным транспортным средством; и
второй показатель вычисляется в соответствии с разностью между величиной ускорения встречного транспортного средства и пороговым значением величины ускорения.
11. Способ управления транспортным средством по любому из пп. 1-6, в котором:
задают пороговое значение величины ускорения как первое пороговое значение величины ускорения, которое является тем большим значением, чем больше расстояние между неподвижным объектом и встречным транспортным средством;
второй показатель вычисляется равным 1, когда величина ускорения встречного транспортного средства больше или равна первому пороговому значению величины ускорения; и
второй показатель вычисляется равным 0, когда величина ускорения встречного транспортного средства меньше первого порогового значения величины ускорения.
12. Способ управления транспортным средством по п. 11, в котором:
задают второе пороговое значение величины ускорения, которое меньше, чем упомянутое первое пороговое значение величины ускорения;
второй показатель вычисляется равным 1, когда величина ускорения встречного транспортного средства больше или равна первому пороговому значению величины ускорения;
второй показатель вычисляется равным 0, когда величина ускорения встречного транспортного средства меньше первого порогового значения величины ускорения и больше или равна второму пороговому значению величины ускорения; и
второй показатель вычисляется равным -1, когда величина ускорения встречного транспортного средства меньше второго порогового значения величины ускорения.
13. Способ управления транспортным средством по любому из пп. 1-6, в котором:
верхнее предельное значение и нижнее предельное значение задают для порогового значения скорости;
первый показатель вычисляется равным 1, когда скорость встречного транспортного средства больше верхнего предельного значения;
первый показатель вычисляется равным 0, когда скорость встречного транспортного средства меньше или равна верхнему предельному значению и больше или равна нижнему предельному значению; и
первый показатель вычисляется равным -1, когда скорость встречного транспортного средства меньше нижнего предельного значения.
14. Способ управления транспортным средством по любому из пп. 1-6, в котором:
верхнее предельное значение и нижнее предельное значение задают для порогового значения величины ускорения;
второй показатель вычисляется равным 1, когда величина ускорения встречного транспортного средства больше верхнего предельного значения;
второй показатель вычисляется равным 0, когда величина ускорения встречного транспортного средства меньше или равна верхнему предельному значению и больше или равна нижнему предельному значению; и
второй показатель вычисляется равным -1, когда величина ускорения встречного транспортного средства меньше нижнего предельного значения.
15. Способ управления транспортным средством по любому из пп. 1-14, в котором объединенный показатель умножают на коэффициент, который является тем меньшим значением, чем больше ширина неподвижного объекта в направлении ширины дороги, чтобы вычислить окончательный объединенный показатель.
16. Способ управления транспортным средством по любому из пп. 1-14, в котором объединенный показатель умножают на коэффициент меньший 1, когда ширина неподвижного объекта в направлении ширины дороги больше или равна предопределенному значению, чтобы вычислить окончательный объединенный показатель.
17. Способ управления транспортным средством по любому из пп. 1-14, в котором объединенный показатель умножают на коэффициент больший или равный 1, когда ширина неподвижного объекта в направлении ширины дороги меньше предопределенного значения, чтобы вычислить окончательный объединенный показатель.
18. Устройство управления транспортным средством, содержащее:
первый датчик, выполненный с возможностью обнаружения позиции неподвижного объекта на дороге, по которой движется основное транспортное средство;
второй датчик, выполненный с возможностью обнаружения скорости основного транспортного средства;
третий датчик, выполненный с возможностью обнаружения позиции и скорости встречного транспортного средства, движущегося в направлении, противоположном направлению движения основного транспортного средства на встречной полосе, прилегающей к полосе движения, в которой движется основное транспортное средство;
контроллер, выполненный с возможностью управления состоянием движения основного транспортного средства в соответствии с данными, обнаруженными первым датчиком, вторым датчиком и третьим датчиком,
причем контроллер дополнительно выполнен с возможностью:
задания области, включающей в себя неподвижный объект на дороге, определяемой в пределах предопределенного расстояния от неподвижного объекта вдоль направления прохождения дороги;
вычисления позиции разъезда, в которой основное транспортное средство и встречное транспортное средство разъезжаются друг с другом, в соответствии со скоростью основного транспортного средства, а также позицией и скоростью встречного транспортного средства;
вычисления первого показателя, который является тем большим значением, чем выше скорость встречного транспортного средства;
вычисления второго показателя, который является тем большим значением, чем выше величина ускорения встречного транспортного средства;
объединения первого показателя со вторым показателем таким образом, чтобы вычислить объединенный показатель; и
побуждения основного транспортного средства замедляться, когда объединенный показатель больше или равен предопределенному значению, или побуждения основного транспортного средства поддерживать скорость или ускоряться, когда объединенный показатель меньше предопределенного значения, в случае, когда упомянутая позиция разъезда имеется в пределах упомянутой области.
| WO 2015198426 A1, 30.12.2015 | |||
| JP 2009116790 A, 28.05.2009 | |||
| JP 2005056732 A, 03.03.2005 | |||
| JP 2010070069 A, 02.04.2010. |

