Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления транспортным средством.
Уровень техники
[0002] В уровне техники известно устройство помощи вождению для уклонения от встречного транспортного средства, которое может выезжать на встречную полосу (патентный документ 1). На основании расстояния между припаркованным транспортным средством на встречной полосе и центральной линии в патентном документе 1 определяют, пересекается ли путь прохождения встречного транспортного средства с полосой транспортного средства-носителя. Когда определено, что путь прохождения встречного транспортного средства пересекается с полосой транспортного средства-носителя, в патентном документе 1 либо останавливают, либо замедляют транспортное средство-носитель.
Список литературы
Патентные документы
[0003] Патентный документ 1: Публикация заявки на патент Японии № 2008-102690
Раскрытие изобретения
[0004] Однако в патентном документе 1 не рассматривается взаимное расположение встречного транспортного средства и транспортного средства-носителя. В патентном документе 1 останавливают транспортное средство-носитель даже когда транспортное средство-носитель может проехать встречное транспортное средство без помехи. Это может затруднять движение потока транспорта.
[0005] Настоящее изобретение было реализовано с учётом вышеописанной проблемы и направлено на создание устройства управления транспортным средством, которое не затрудняет движение потока транспорта, определяя взаимное расположение транспортного средства-носителя и встречного транспортного средства.
[0006] Устройство управления транспортным средством согласно аспекту настоящего изобретения определяет положение и скорость транспортного средства-носителя, определяет положение и скорость каждого неподвижного объекта и движущегося объекта, которые находятся впереди транспортного средства-носителя, вычисляет положение проезда, в котором транспортное средство-носитель проезжает движущийся объект, на основании положения и скорости транспортного средства-носителя и положения и скорости движущегося объекта, устанавливает область вокруг неподвижного объекта, и когда положение проезда находится в пределах упомянутой области, управляет движением транспортного средства-носителя, чтобы перемещать положение проезда из упомянутой области.
Краткое описание чертежей
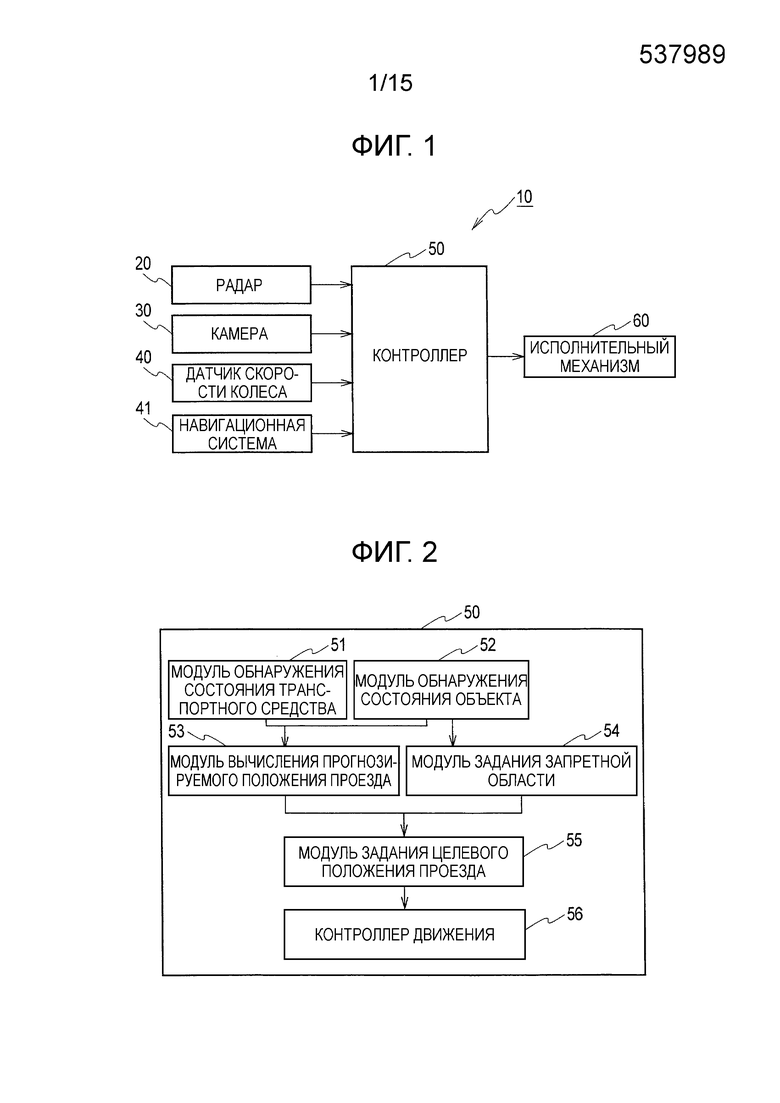
[0007] Фиг. 1 - это блок-схема, показывающая конфигурацию устройства 10 управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 - это блок-схема, показывающая функциональную конфигурацию контроллера 50 устройства 10 управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
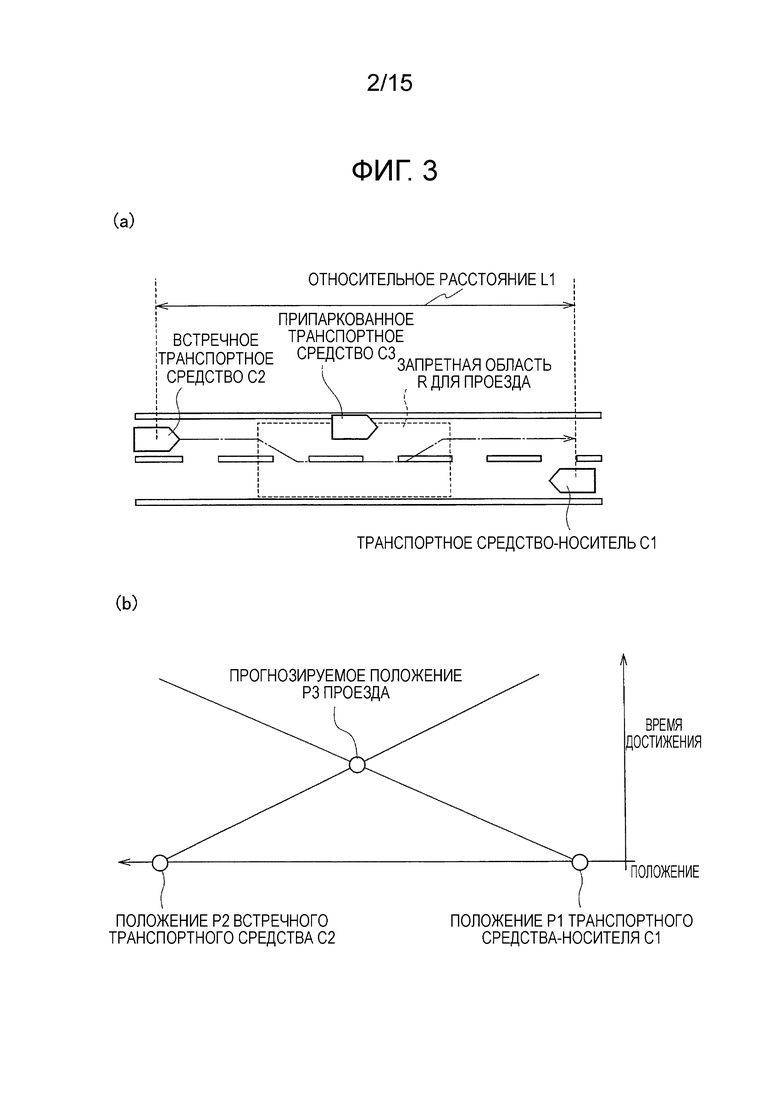
Фиг. 3(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 3(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда.
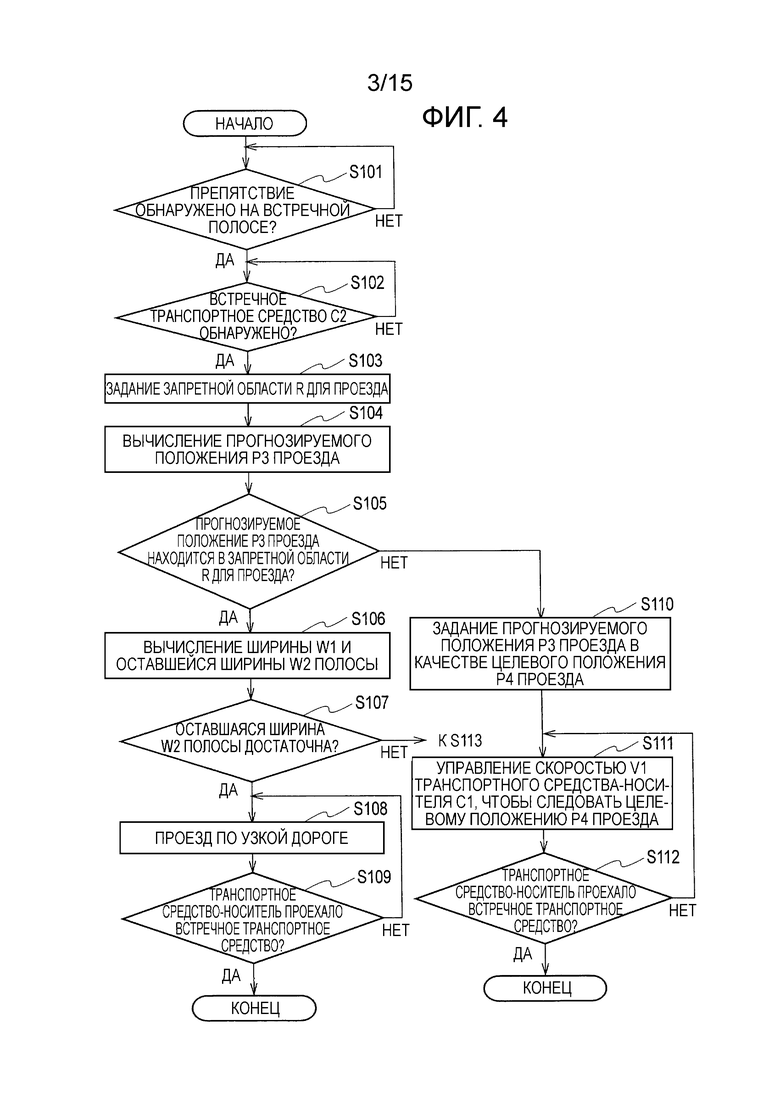
Фиг. 4 - это блок-схема, иллюстрирующая пример операции, выполняемой устройством 10 управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
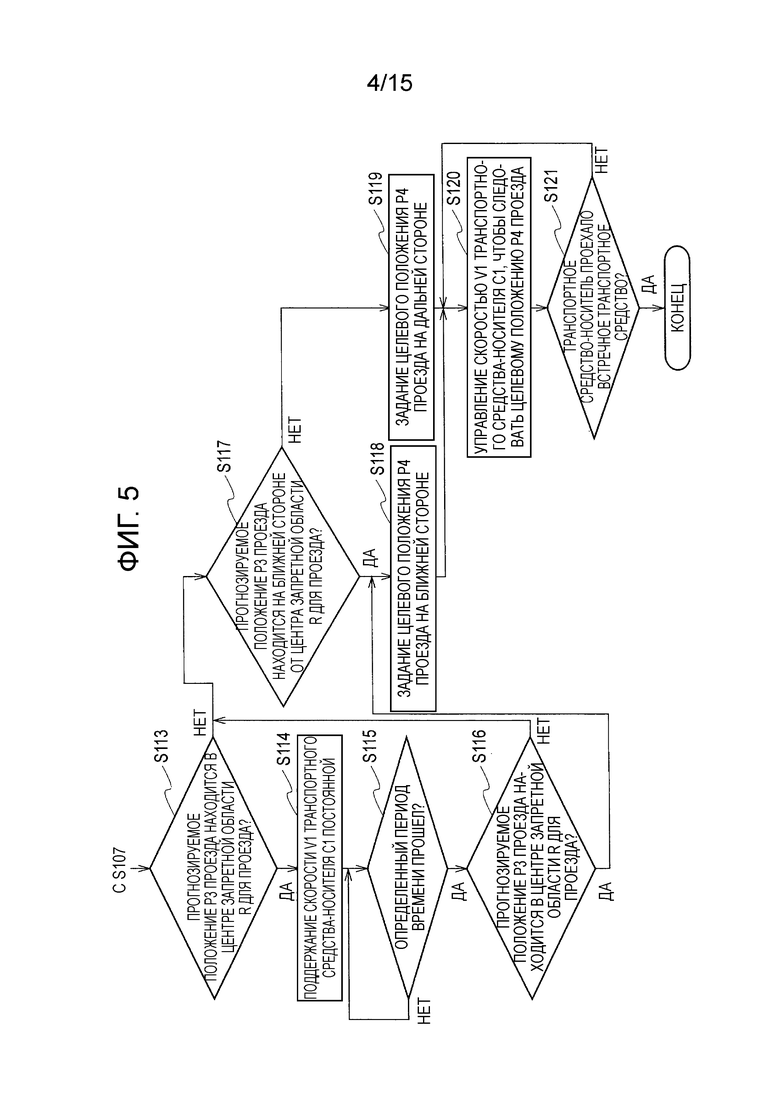
Фиг. 5 - это блок-схема, иллюстрирующая пример операции, выполняемой устройством 10 управления транспортным средством согласно первому варианту осуществления настоящего изобретения.
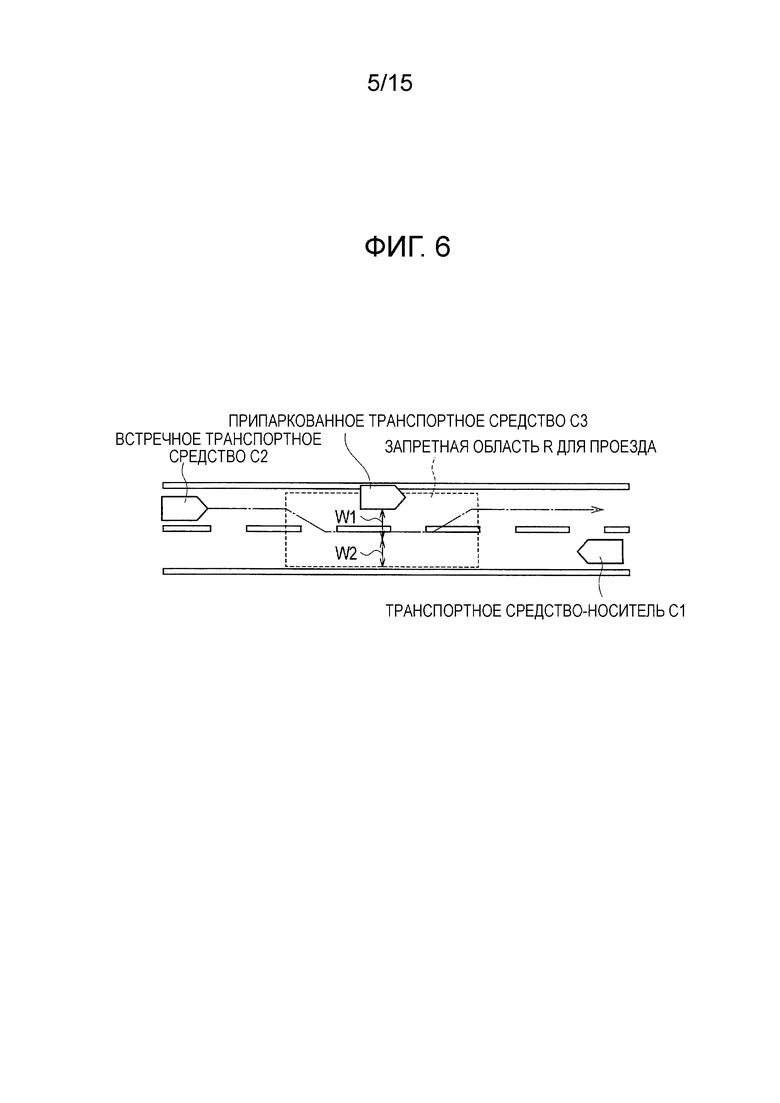
Фиг. 6 - это схема, иллюстрирующая ширину W1 и оставшуюся ширину W2 полосы.
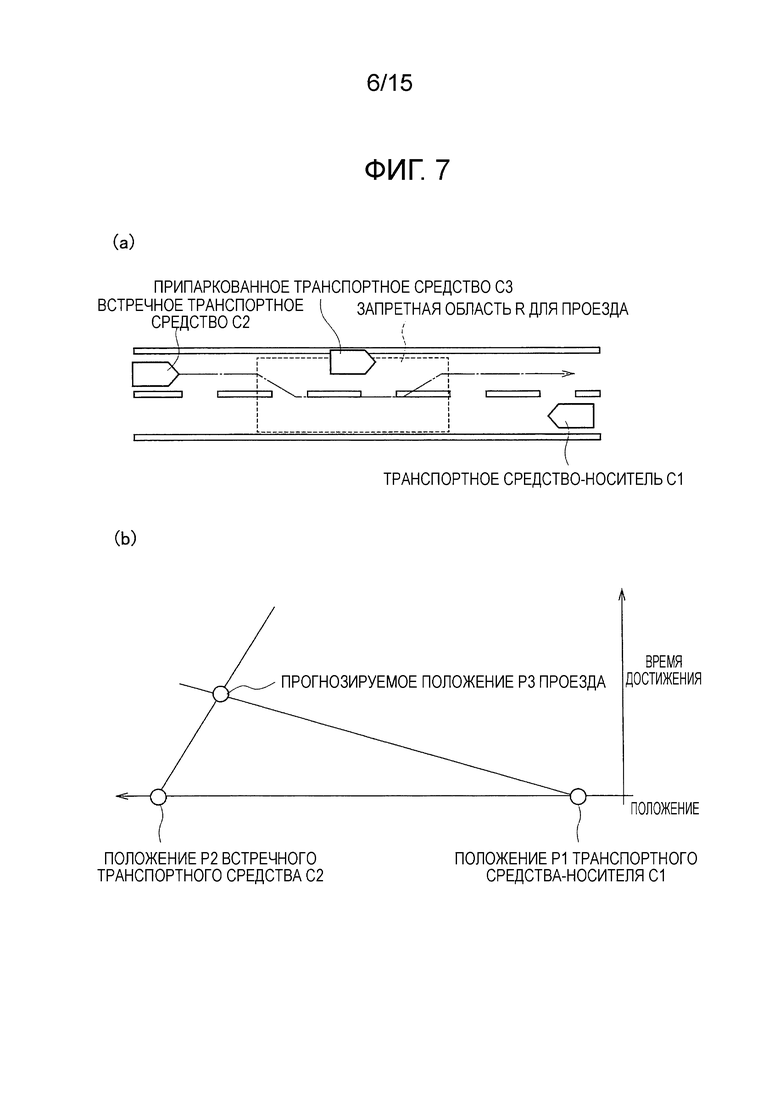
Фиг. 7(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 7(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда.
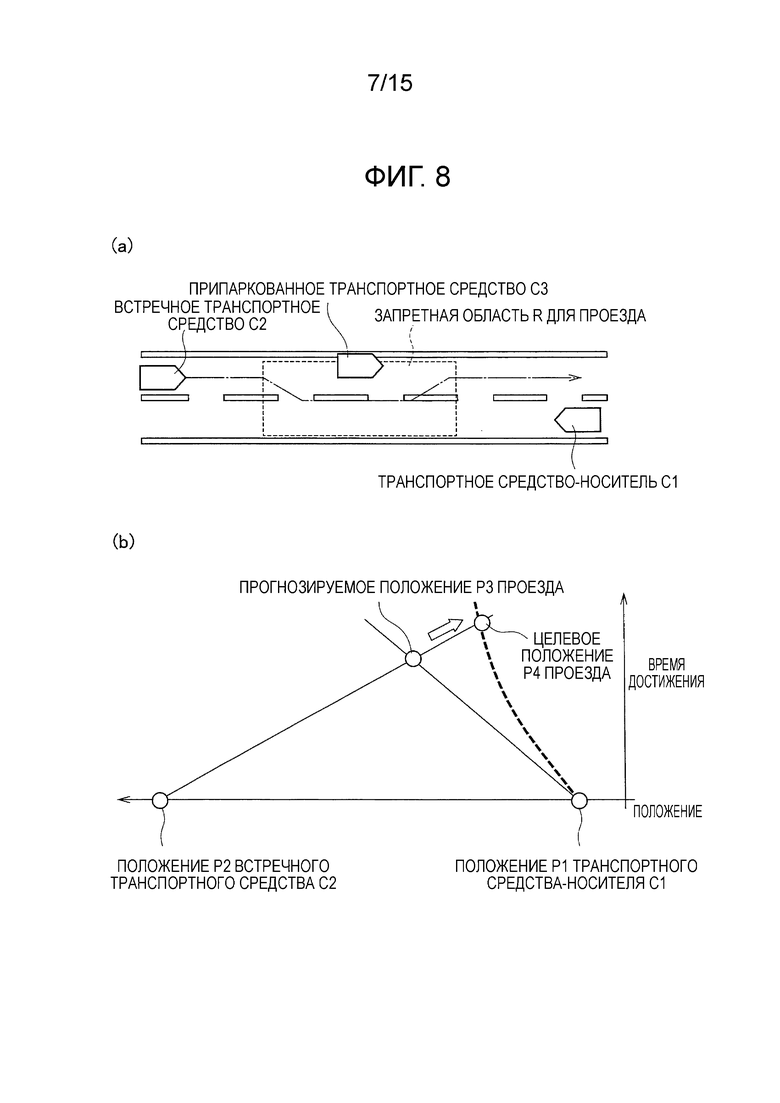
Фиг. 8(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 8(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда и целевое положение P4 проезда.
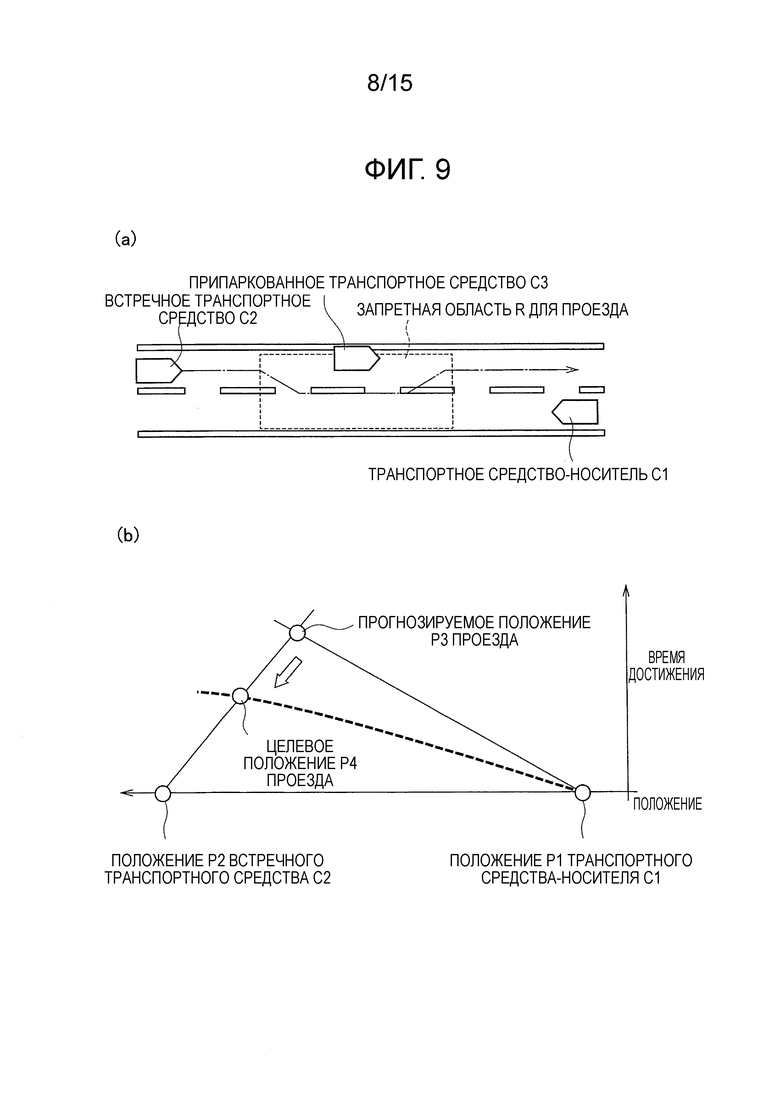
Фиг. 9(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 9(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда и целевое положение P4 проезда.
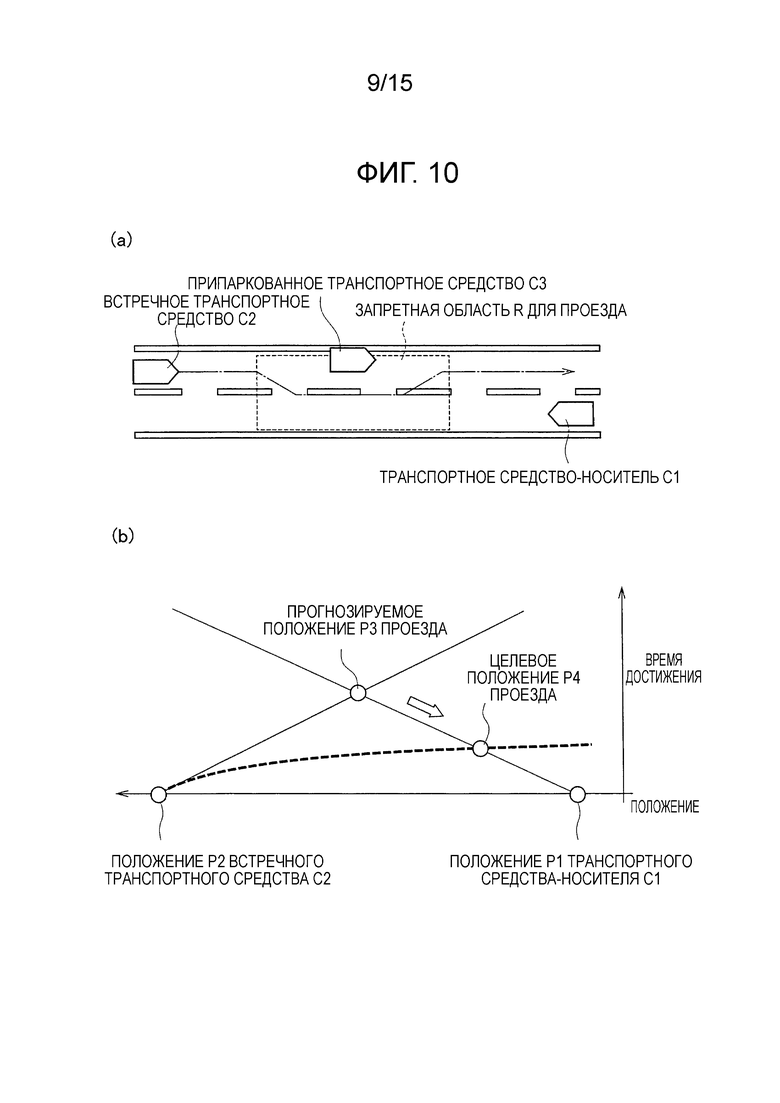
Фиг. 10(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 10(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда и целевое положение P4 проезда.
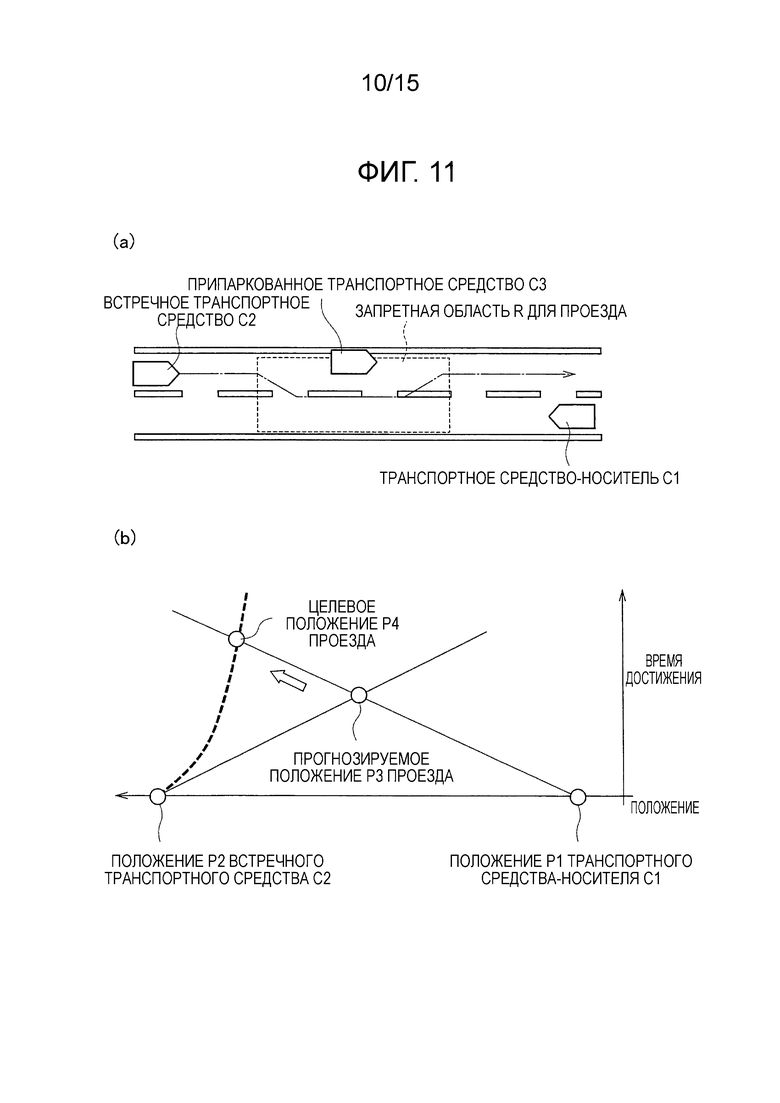
Фиг. 11(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 11(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда и целевое положение P4 проезда.
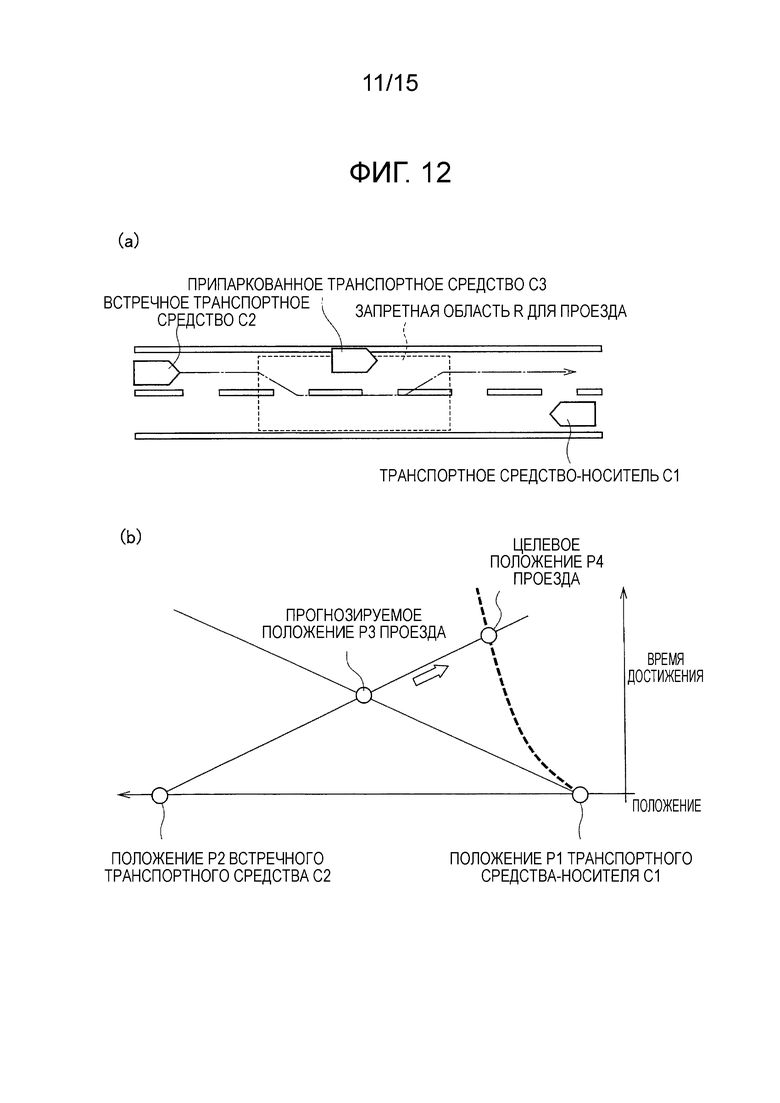
Фиг. 12(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 12(b) - это схема, иллюстрирующая прогнозируемое положение P3 проезда и целевое положение P4 проезда.
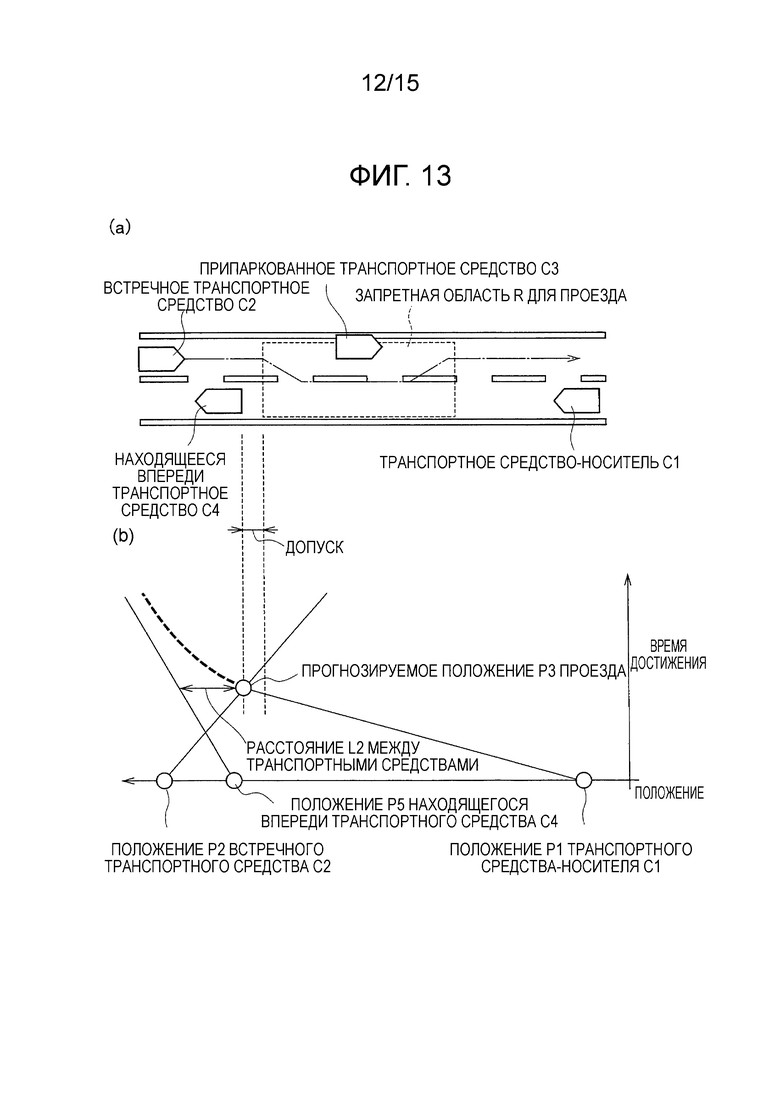
Фиг. 13(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 13(b) - это схема, иллюстрирующая допуск для прохождения запретной области R.
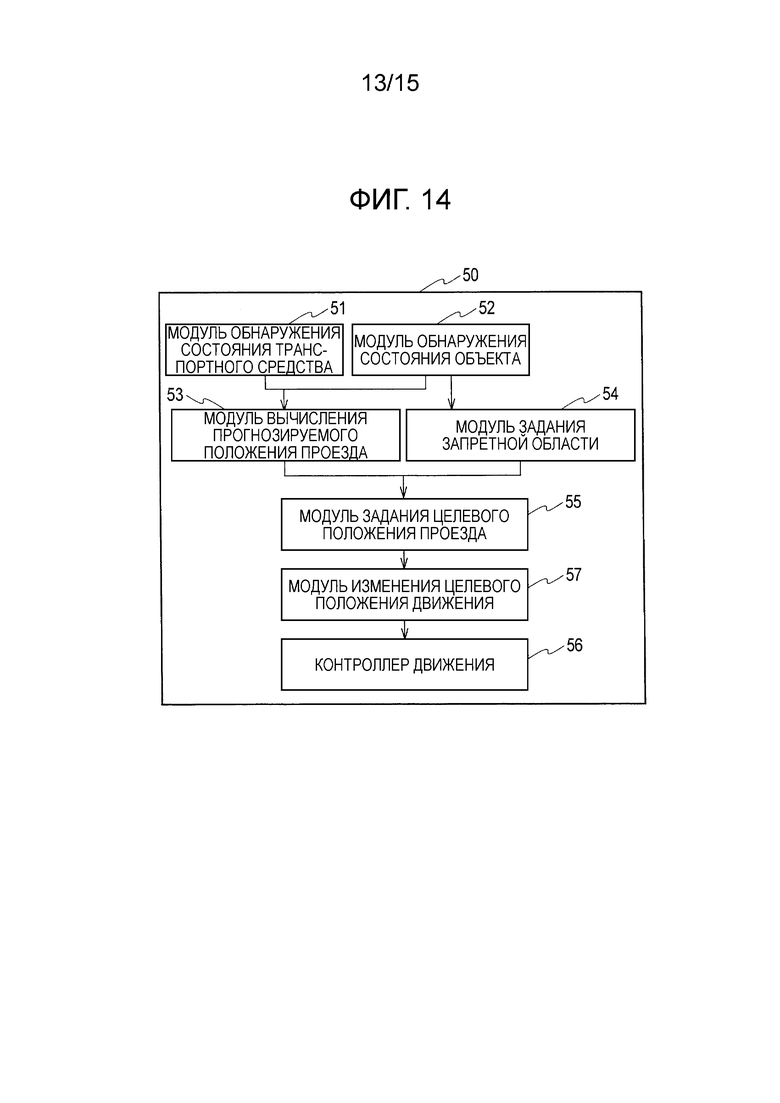
Фиг. 14 - это блок-схема, показывающая функциональную конфигурацию контроллера 50 устройства 10 управления транспортным средством согласно второму варианту осуществления настоящего изобретения.
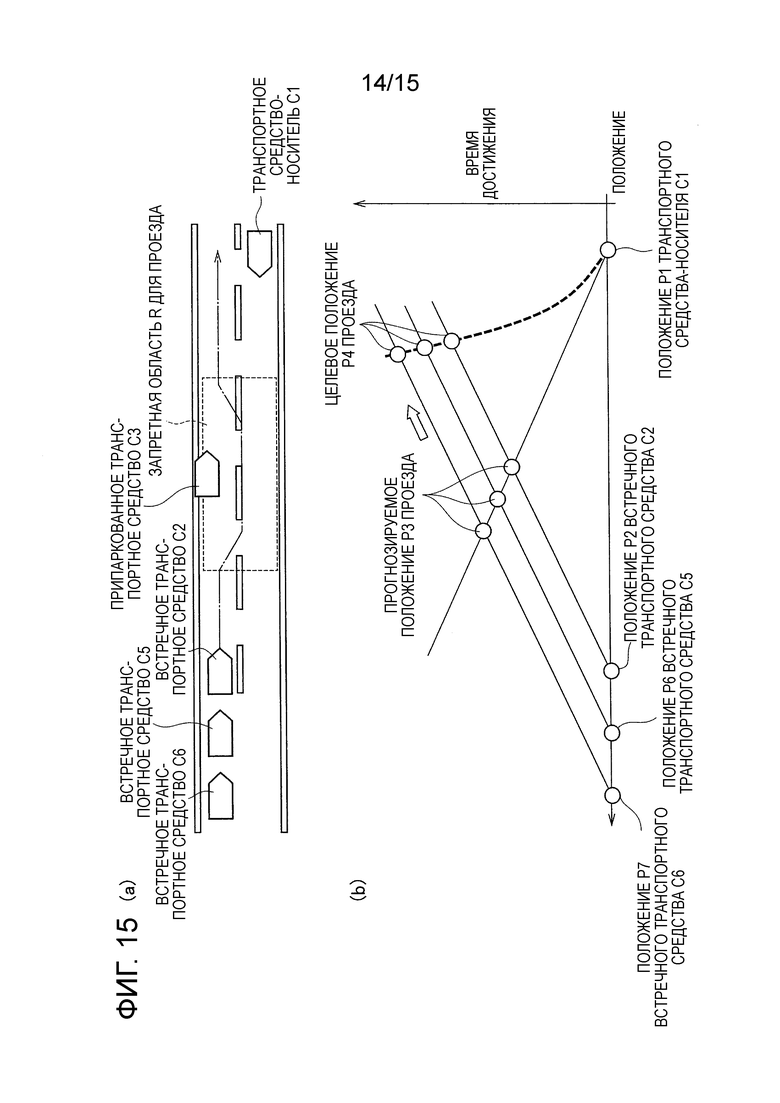
Фиг. 15(a) - это схема, иллюстрирующая сценарий для выполнения управления проездом.
Фиг. 15(b) - это схема, иллюстрирующая прогнозируемые положения P3 проезда и целевые положения P4 проезда.
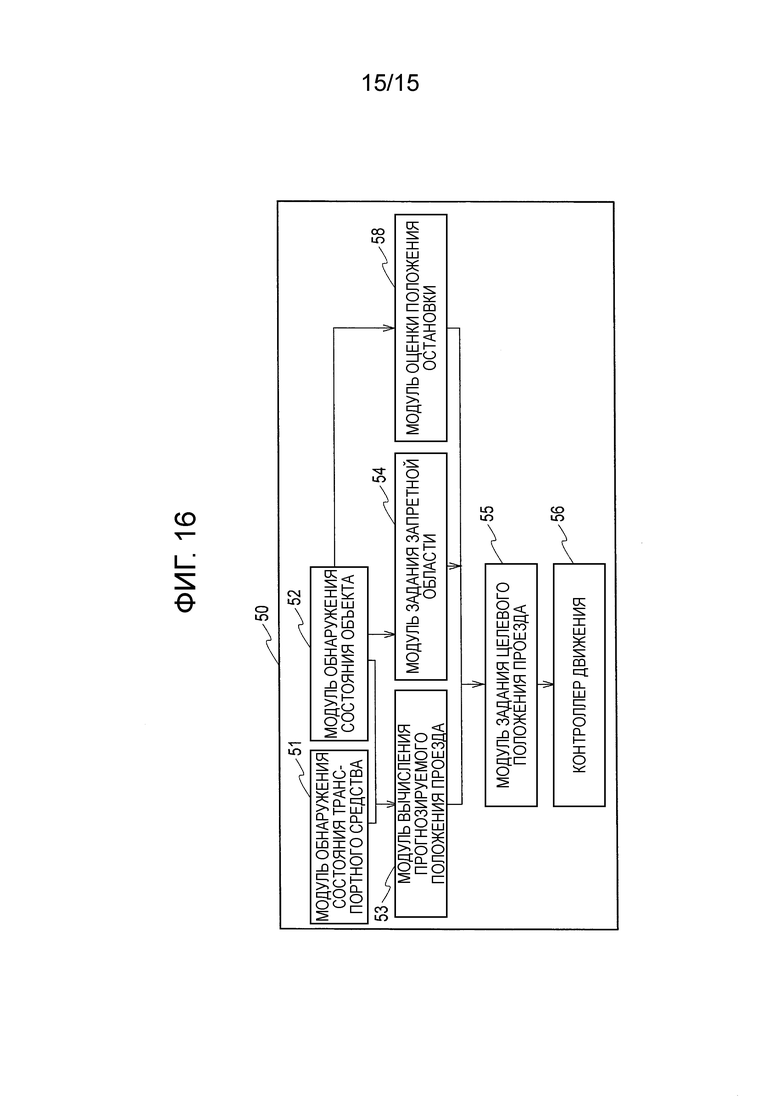
Фиг. 16 - это блок-схема, показывающая функциональную конфигурацию контроллера 50 устройства 10 управления транспортным средством согласно третьему варианту осуществления настоящего изобретения.
Осуществление изобретения
[0008] Варианты осуществления настоящего изобретения описаны ниже со ссылкой на чертежи. На всех чертежах одинаковые компоненты обозначаются одинаковыми условными обозначениями, чтобы избежать повторного описания.
[0009] [Первый вариант осуществления]
Конфигурация устройства 10 управления транспортным средством согласно настоящему варианту осуществления описана со ссылкой на фиг. 1. Как показано на фиг. 1, устройство 10 управления транспортным средством согласно настоящему варианту осуществления включает в себя радар 20, камеру 30, датчик 40 скорости колеса, навигационную систему 41, контроллер 50 и исполнительный механизм 60.
[0010] Радар 20 обнаруживает рядом с транспортным средством-носителем присутствие, положение и скорость объекта, такого как транспортное средство, мотоцикл, велосипед или пешеход. Радар 20 также определяет относительную скорость объекта по отношению к транспортному средству-носителю C1. В качестве радара 20 может быть использован лазерный радар или радар миллиметрового диапазона. Радар 20 выводит данные обнаружения в контроллер 50.
[0011] Камера 30 устанавливается на переднюю сторону транспортного средства-носителя и захватывает изображение сцены впереди транспортного средства. Камера 30 представляет собой, например, камеру, имеющую элемент формирования изображения, такой как CCD или CMOS. Камера 30 захватывает изображения последовательно во времени и выводит захваченные изображения в контроллер 50.
[0012] Датчик 40 скорости колеса определяет скорость вращения каждого колеса транспортного средства-носителя, чтобы определять скорость транспортного средства. Датчик 40 скорости колеса выводит обнаруженную скорость в контроллер 50.
[0013] Навигационная система 41 задает маршрут движения для транспортного средства-носителя и выполняет навигацию по маршруту с помощью информации о положении транспортного средства-носителя, полученной от GPS. Навигационная система 41 выводит, в контроллер 50, информацию о положении транспортного средства-носителя, полученную от GPS, картографическую информацию об окружающей обстановке, местоположение и форму перекрестка, информацию о сигнале светофора и т.п.
[0014] Контроллер 50 управляет двигательным состоянием транспортного средства (управление движением), выполняя различные типы вычисления с помощью частей информации, полученных посредством радара 20, камеры 30, датчика 40 скорости колеса и навигационной системы 41, и затем выводит управляющие сигналы исполнительному механизму 60 согласно результатам вычисления. Контроллер 50 выполнен в виде компьютера, в общем включающего в себя CPU и средство записи, такое как RAM, ROM и жесткий диск.
[0015] Исполнительный механизм 60, например, представляет собой исполнительный механизм, который управляет давлением тормозной жидкости, прикладываемым к цилиндрам колес транспортного средства. Контроллер 50 может тормозить транспортное средство-носитель, управляя исполнительным механизмом 60, чтобы формировать тормозное усилие на колесах.
[0016] Далее конфигурация контроллера 50 описана со ссылкой на фиг. 2.
Как показано на фиг. 2, с функциональной точки зрения контроллер 50 может быть классифицирован на модуль 51 обнаружения состояния транспортного средства, модуль 52 обнаружения состояния объекта, модуль 53 вычисления прогнозируемого положения проезда, модуль 54 задания запрещенной области, модуль 55 задания целевого положения проезда и контроллер 56 движения.
[0017] Работа каждой классифицированной конфигурации описана теперь со ссылкой на фиг. 3.
Модуль 51 обнаружения состояния транспортного средства считывает сигнал обнаружения от датчика 40 скорости колеса и определяет скорость V1 транспортного средства-носителя C1 из информации, считанной таким образом, скорость V1 является одним из состояний движения транспортного средства-носителя C1, показанных на фиг. 3(a). Модуль 51 обнаружения состояния транспортного средства затем выводит обнаруженную скорость V1 в модуль 53 вычисления прогнозируемого положения проезда.
[0018] Модуль 52 обнаружения состояния объекта определяет на основании сигнала обнаружения от радара 20 положение и скорость перемещения объекта (включающего в себя движущийся объект и неподвижный объект), находящегося рядом с транспортным средством-носителем C1. В частности, модуль 52 обнаружения состояния объекта обнаруживает встречное транспортное средство C2 (движущийся объект) и припаркованное транспортное средство C3 (неподвижный объект), оба на встречной полосе, и определяет относительное расстояние L1 между транспортным средством-носителем C1 и встречным транспортным средством C2, относительную скорость ΔV2 встречного транспортного средства C2 по отношению к транспортному средству-носителю C1, относительную скорость ΔV3 припаркованного транспортного средства C3 относительно транспортного средства-носителя C1 и т.п. Модуль 52 обнаружения состояния объекта затем выводит эти данные обнаружения в модуль 53 вычисления прогнозируемого положения проезда и модуль 54 задания запретной области.
[0019] Модуль 52 обнаружения состояния объекта включает в себя процессор изображения, чтобы выполнять заданную обработку изображения по сигналам изображения, захватываемым посредством камеры 30. Модуль 52 обнаружения состояния объекта может, таким образом, определять состояние дороги рядом с транспортным средством-носителем C1.
[0020] Модуль 53 вычисления прогнозируемого положения проезда вычисляет прогнозируемое положение P3 проезда на основании относительно расстояния L1 между транспортным средством-носителем C1 и встречным транспортным средством C2, скорости V1 транспортного средства-носителя C1 и скорости V2 встречного транспортного средства C2. Прогнозируемое положение P3 проезда является прогнозируемым положением, в котором транспортное средство-носитель C1 и встречное транспортное средство C2 проезжают друг друга. Сначала, модуль 53 вычисления прогнозируемого положения проезда вычисляет скорость V2 встречного транспортного средства C2 с помощью скорости V1 транспортного средства-носителя и относительной скорости ΔV2 встречного транспортного средства C2 относительно транспортного средства-носителя C1, как показано ниже.
V2=V1+ΔV2 ··· (1)
[0021] Модуль 53 вычисления прогнозируемого положения проезда затем вычисляет прогнозируемое положение P3 проезда, показанную на фиг. 3(b), с помощью скорости V1 транспортного средства-носителя C1, скорости V2 встречного транспортного средства C2 и относительного расстояния L1 между транспортным средством-носителем C1 и встречным транспортным средством C2, как показано ниже.
P3=L1÷(1+V2÷V1) ··· (2)
Отметим, что прогнозируемое положение P3 проезда вычисляется с помощью его начала, являющегося положением P1 транспортного средства-носителя C1, показанного на фиг. 3(b). Взаимное расположение положения P1 транспортного средства-носителя C1 и положения P2 встречного транспортного средства C2, как показано на фиг. 3(b), соответствует взаимному расположению транспортного средства-носителя C1 и встречного транспортного средства C2, как показано на фиг. 3(a).
[0022] Модуль 53 вычисления прогнозируемого положения проезда выводит вычисленную прогнозируемое положение P3 проезда в модуль 55 задания целевого положения проезда.
[0023] Модуль 54 задания запретной области задает запретную область R для проезда вокруг припаркованного транспортного средства C3 на встречной полосе. Пример того, как задавать запретную область R для проезда, описан со ссылкой на фиг. 3(a). Модуль 54 задания запретной области может определять, на основании размера припаркованного транспортного средства C3 и расстояния между припаркованным транспортным средством C3 и центральной линией, область, где встречное транспортное средство C2 въезжает на полосу транспортного средства-носителя, как показано на фиг. 3(a), и задает эту область в качестве запретной области R для проезда.
[0024] Модуль 54 задания запретной области может определять, задавать ли запретную область R для проезда на основании относительной скорости ΔV3 припаркованного транспортного средства C3 относительно транспортного средства-носителя C1. В частности, модуль 54 задания запретной области вычисляет скорость V3 припаркованного транспортного средства C3 с помощью скорости V1 транспортного средства-носителя C1 и относительной скорости ΔV3 припаркованного транспортного средства C3 относительно транспортного средства-носителя C1, как показано ниже.
V3=V1+ΔV3 ··· (3)
[0025] Затем, когда скорость V3 припаркованного транспортного средства C3 равна или меньше заданного порогового значения Vth скорости, модуль 54 задания запретной области определяет, что припаркованное транспортное средство C3 является неподвижным объектом, и задает запретную область R для проезда вокруг припаркованного транспортного средства C3. Когда скорость V3 припаркованного транспортного средства C3 больше порогового значения Vth скорости, модуль 54 задания запретной области определяет, что припаркованное транспортное средство C3 является движущимся объектом, и не задает запретную область R для проезда вокруг припаркованного транспортного средства C3. Пороговое значение Vth скорости может быть задано равным нолю.
[0026] Модуль 54 задания запретной области выводит заданную таким образом запретную область R для проезда в модуль 55 задания целевого положения проезда.
[0027] Модуль 55 задания целевого положения проезда определяет, находится ли прогнозируемое положение P3 проезда в запретной области R для проезда. Когда определяется, что прогнозируемое положение P3 проезда находится в запретной области R для проезда, модуль 55 задания целевого положения проезда перемещает прогнозируемое положение P3 проезда из запретной области R для проезда и задает перемещенное положение в качестве целевого положения P4 проезда. Модуль 55 задания целевого положения проезда затем выводит заданную таким образом целевое положение P4 проезда в контроллер 56 движения. Когда определяется, что прогнозируемое положение P3 проезда не находится в запретной области R для проезда, модуль 55 задания целевого положения проезда задает прогнозируемое положение P3 проезда в качестве целевого положения P4 проезда.
[0028] Контроллер 56 движения управляет движением транспортного средства-носителя C1 так, что транспортное средство-носитель C1 может проезжать встречное транспортное средство C2 в целевого положения P4 проезда.
[0029] Далее пример работы, выполняемой устройством 10 управления транспортным средством согласно первому варианту осуществления, описан со ссылкой на блок-схемы, показанные на фиг. 4 и 5. Эта обработка повторяется в заданном цикле.
[0030] На этапе S101 модуль 52 обнаружения состояния объекта обнаруживает препятствие на встречной полосе. Препятствие при этом является неподвижным объектом, для которого встречное транспортное средство C2 должно пересечь центральную линию, чтобы проехать, как показано на фиг. 3(a). Когда модуль 52 обнаружения состояния объекта обнаруживает препятствие, обработка переходит к этапу S102. Когда модуль 52 обнаружения состояния объекта не обнаруживает препятствие, модуль 52 обнаружения состояния объекта находится в режиме готовности. В этом примере модуль 52 обнаружения состояния объекта обнаруживает препятствие, которое является припаркованным транспортным средством C3, припаркованным на встречной полосе.
[0031] Далее, на этапе S102, модуль 52 обнаружения состояния объекта обнаруживает встречное транспортное средство C2 на встречной полосе. Когда модуль 52 обнаружения состояния объекта обнаруживает встречное транспортное средство C2, обработка переходит к этапу S103. Когда модуль 52 обнаружения состояния объекта не обнаруживает встречное транспортное средство C2, модуль 52 обнаружения состояния объекта находится в режиме готовности.
[0032] Далее, на этапе S103, модуль 54 задания запретной области задает запретную область R для проезда рядом с припаркованным транспортным средством C3.
[0033] Далее, на этапе S104, модуль 53 вычисления прогнозируемого положения проезда вычисляет прогнозируемое положение P3 проезда.
[0034] Далее, на этапе S105, модуль 55 задания целевого положения проезда определяет, находится ли прогнозируемое положение P3 проезда в запретной области R для проезда. Когда модуль 55 задания целевого положения проезда определяет, что прогнозируемое положение P3 проезда находится в запретной области R для проезда, обработка переходит к этапу S106. Когда модуль 55 задания целевого положения проезда определяет, что прогнозируемое положение P3 проезда не находится в запретной области R для проезда, обработка переходит к этапу S110.
[0035] Далее, на этапе S106, модуль 52 обнаружения состояния объекта определяет ширину W1, требуемую для встречного транспортного средства C2, чтобы избегать и объезжать припаркованное транспортное средство C3, как показано на фиг. 6. Ширина W1 может быть получена посредством сложения ширины транспортного средства для встречного транспортного средства C2 с пространством, необходимым, чтобы избегать касания с припаркованным транспортным средством C3. Далее, модуль 52 обнаружения состояния объекта определяет оставшуюся ширину W2 полосы, полученную вычитанием ширины припаркованного транспортного средства C3 и ширины W1 из общей ширины полос движения.
[0036] Далее, на этапе S107, модуль 55 задания целевого положения проезда определяет, достаточна ли оставшаяся ширина W2 полосы для транспортного средства-носителя C1, чтобы избегать касания с встречным транспортным средством C2 при проезде встречного транспортного средства C2. Когда оставшаяся ширина W2 полосы достаточна, чтобы избегать касания, обработка переходит к этапу S108. Когда оставшаяся ширина W2 полосы недостаточна, чтобы избегать касания, обработка переходит к этапу S113.
[0037] Далее, на этапе S108, контроллер 56 движения тянет транспортное средство-носитель C1 в левую сторону полосы транспортного средства-носителя. Когда транспортное средство-носитель C1 проезжает встречное транспортное средство C2 по узкой дороге (Да на S109), обработка заканчивается.
[0038] На этапе S110, так как прогнозируемое положение P3 проезда находится за пределами запретной области R для проезда, как показано на фиг. 7(b), модуль 55 задания целевого положения проезда задает прогнозируемое положение P3 проезда в качестве целевого положения P4 проезда.
[0039] Далее, на этапе S111, контроллер 56 движения управляет исполнительным механизмом 60 транспортного средства-носителя C1 так, что транспортное средство-носитель C1 может проезжать встречное транспортное средство C2 в целевого положения P4 проезда, т.е. так, что транспортное средство-носитель C1 может следовать целевому положению P4 проезда. Когда транспортное средство-носитель C1 проезжает встречное транспортное средство C2 (Да на S112), обработка заканчивается.
[0040] На этапе S113 модуль 55 задания целевого положения проезда определяет, находится ли прогнозируемое положение P3 проезда в центре запретной области R для проезда. Прогнозируемое положение P3 проезда, находящееся в центре запретной области R для проезда, означает, что, как показано на фиг. 3(b), прогнозируемое положение P3 проезда находится далее в правую сторону припаркованного транспортного средства C3. Когда модуль 55 задания целевого положения проезда определяет, что прогнозируемое положение P3 проезда находится в центре запретной области R для проезда, обработка переходит к этапу S114. Когда модуль 55 задания целевого положения проезда определяет, что прогнозируемое положение P3 проезда не находится в центре запретной области R для проезда, обработка переходит к этапу S117.
[0041] Далее, на этапе S117, модуль 55 задания целевого положения проезда определяет, находится ли прогнозируемое положение P3 проезда, рассматриваемое с точки зрения транспортного средства-носителя C1, на ближней стороне или дальней стороне припаркованного транспортного средства C3. Когда прогнозируемое положение P3 проезда находится на ближней стороне припаркованного транспортного средства C3, как показано на фиг. 8(b), обработка переходит к этапу S118. Когда прогнозируемое положение P3 проезда находится на дальней стороне припаркованного транспортного средства C3, как показано на фиг. 9(b), обработка переходит к этапу S119.
[0042] На этапе S118 модуль 55 задания целевого положения проезда задает целевое положение P4 проезда, перемещая прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону, как показано на фиг. 8(b). В частности, модуль 55 задания целевого положения проезда получает замедление DCC1 транспортного средства-носителя C1, необходимое, чтобы перемещать прогнозируемое положение P3 проезда в целевое положение P4 проезда. Замедление DCC1 транспортного средства-носителя C1 может быть получено с помощью скорости V1 транспортного средства-носителя C1, скорости V2 встречного транспортного средства C2, относительного расстояния L1 между транспортным средством-носителем C1 и встречным транспортным средством C2 и прогнозируемого положения P3 проезда.
[0043] На этапе S119 модуль 55 задания целевого положения проезда задает целевое положение P4 проезда, перемещая прогнозируемое положение P3 проезда из запретной области R для проезда в дальнюю сторону, как показано на фиг. 9(b). В частности, модуль 55 задания целевого положения проезда получает ускорение ACC1 транспортного средства-носителя C1, необходимое, чтобы перемещать прогнозируемое положение P3 проезда в целевое положение P4 проезда. Ускорение ACC1 транспортного средства-носителя C1 может быть получено с помощью скорости V1 транспортного средства-носителя C1, скорости V2 встречного транспортного средства C2, относительного расстояния L1 между транспортным средством-носителем C1 и встречным транспортным средством C2 и прогнозируемого положения P3 проезда. Модуль 55 задания целевого положения проезда может задавать верхнее предельное значение для ускорения ACC1, и когда ускорение ACC1, необходимое, чтобы перемещать прогнозируемое положение P3 проезда в целевое положение P4 проезда, превышает верхнее предельное значение, задает целевое положение P4 проезда, перемещая прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону.
[0044] На этапах S114 и S115 контроллер 56 движения побуждает транспортное средство-носитель V1 двигаться в течение определенного периода времени T, в то же время поддерживая свою скорость V1 постоянной.
[0045] Далее, на этапе S116, модуль 55 задания целевого положения проезда определяет снова, находится ли прогнозируемое положение P3 проезда в центре запретной области R для проезда. Когда модуль 55 задания целевого положения проезда определяет, что прогнозируемое положение P3 проезда не находится в центре запретной области R для проезда, обработка переходит к этапу S117. Этот случай означает, что прогнозируемое положение P3 проезда было перемещено из центра запретной области R для проезда после определенного периода времени T вследствие ускорения или замедления встречного транспортного средства C2. Например, в случае, когда встречное транспортное средство C2 ускоряется, чтобы в результате перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону, как показано на фиг. 10(b), модуль 55 задания целевого положения проезда задает перемещенное положение в качестве целевого положения P4 проезда (этап S118). В другом случае, когда встречное транспортное средство C2 замедляется, чтобы в результате перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в дальнюю сторону, как показано на фиг. 11(b), модуль 55 задания целевого положения проезда задает перемещенное положение в качестве целевого положения P4 проезда (этап S119).
[0046] Когда модуль 55 задания целевого положения проезда определяет на этапе S116, что прогнозируемое положение P3 проезда находится в центре запретной области R для проезда, т.е. когда прогнозируемое положение P3 проезда не перемещено после определенного периода времени T, обработка переходит к этапу S118. В этом случае, модуль 55 задания целевого положения проезда задает целевое положение P4 проезда, перемещая прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону, как показано на фиг. 12(b). Определенный период времени T может быть задан с помощью расстояния между транспортным средством-носителем C1 и границей с ближней стороны запретной области R для проезда и скорости V1 транспортного средства-носителя C1. Тем самым транспортное средство-носитель C1 может проезжать встречное транспортное средство C2 плавно без резкого замедления, даже когда целевое положение P4 проезда задается на ближней стороне на этапе S118 или дальней стороне на этапе S119 после этапа S116.
[0047] На этапе S120, контроллер 56 движения управляет исполнительным механизмом 60 транспортного средства-носителя C1 так, что транспортное средство-носитель C1 может проезжать встречное транспортное средство C2 в целевом положении P4 проезда, т.е. так, что транспортное средство-носитель C1 может следовать целевому положению P4 проезда. Когда транспортное средство-носитель C1 проезжает встречное транспортное средство C2 (Да на S121), обработка заканчивается.
[0048] Если существует находящееся впереди транспортное средство C4 на полосе транспортного средства-носителя, как показано на фиг. 13(a), модуль 53 вычисления прогнозируемого положения проезда может использовать скорость транспортного средства-носителя C1, скорость V4 находящегося впереди транспортного средства C4 и расстояние L2 между транспортными средствами, имеющееся между транспортным средством-носителем C1 и находящимся впереди транспортным средством C4, чтобы формировать профиль для скорости V1 (хронологические данные о скорости V1), которая позволяет расстоянию L2 между транспортными средствами не уменьшаться до заданного значения или ниже него. Затем модуль 53 вычисления прогнозируемого положения проезда может вычислять прогнозируемое положение P3 проезда с помощью профиля для скорости V1, скорости V2 встречного транспортного средства C2 и относительного расстояния L1 между транспортным средством-носителем C1 и встречным транспортным средством C2. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2, в то же время поддерживая расстояние L2 между транспортными средствами до находящегося впереди транспортного средства C4.
[0049] В случае, когда существует находящееся впереди транспортное средство C4 на полосе транспортного средства-носителя, модуль 54 задания запретной области может расширять запретную область R для проезда, добавляя допуск к дальней стороне запретной области R для проезда, как показано на фиг. 13(b). Модуль 54 задания запретной области задает целевое положение P4 проезда за пределами запретной области R для проезда на ближней стороне, когда возможен сценарий, такой как следующий: находящееся впереди транспортное средство C4 замедляется резко, и транспортное средство-носитель C1 замедляется, но не может поддерживать расстояние L2 между транспортными средствами равным или выше заданного значения после проезда прогнозируемого положения P3 проезда, как показано с помощью пунктирной линии на фиг. 13(b). При целевом положении P4 проезда, задаваемом таким образом, транспортное средство-носитель C1 может проезжать встречное транспортное средство C2 за пределами запретной области R для проезда, в то же время поддерживая расстояние L2 между транспортными средствами равным или выше заданного значения.
[0050] Модуль 54 задания запретной области может изменять допуск согласно условиям движения по полосе транспортного средства-носителя (переполненность, информация о сигнале светофора, расположенного впереди, и информация о транспортном средстве впереди находящегося впереди транспортного средства). Таким образом, модуль 54 задания запретной области может задавать подходящий допуск, позволяющий транспортному средству-носителю C1 проезжать встречное транспортное средство C2 вне запретной области R для проезда, в то же время поддерживая расстояние между транспортными средствами равным или выше заданного значения.
[0051] Как описано, устройство 10 управления транспортным средством согласно первому варианту осуществления задает запретную область R для проезда вокруг припаркованного транспортного средства C3, вычисляет прогнозируемое положение P3 проезда, в котором транспортное средство-носитель C1 проезжает встречное транспортное средство C2, и определяет, находится или нет прогнозируемое положение P3 проезда в запретной области R для проезда. Когда определяется, что прогнозируемое положение P3 проезда находится в запретной области R для проезда, устройство 10 управления транспортным средством управляет движением транспортного средства-носителя C1 так, что прогнозируемое положение P3 проезда может перемещаться из запретной области R для проезда. Транспортное средство-носитель C1 может, таким образом, проезжать встречное транспортное средство C2 вне запретной области R для проезда.
[0052] Когда прогнозируемое положение P3 проезда находится на ближней стороне (стороне транспортного средства-носителя C1) от центра запретной области R для проезда (центр находится рядом с правой стороной припаркованного транспортного средства C3), устройство 10 управления транспортным средством согласно первому варианту осуществления замедляет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда с ее ближней стороны.
[0053] Когда прогнозируемое положение P3 для проезда находится на дальней стороне (стороне встречного транспортного средства C2) от центра запретной области R для проезда, устройство 10 управления транспортным средством согласно первому варианту осуществления ускоряет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в дальнюю сторону. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда с ее дальней стороны.
[0054] Когда прогнозируемое положение P3 проезда находится в центре запретной области R для проезда, устройство 10 управления транспортным средством согласно первому варианту осуществления побуждает транспортное средство-носитель C1 двигаться с определенной скоростью в течение определенного периода времени. Когда прогнозируемое положение P3 проезда перемещается в ближнюю сторону от центра запретной области R для проезда впоследствии, устройство 10 управления транспортным средством замедляет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда с ее ближней стороны.
[0055] Когда прогнозируемое положение P3 проезда находится в центре запретной области R для проезда, устройство 10 управления транспортным средством согласно первому варианту осуществления побуждает транспортное средство-носитель C1 двигаться с определенной скоростью в течение определенного периода времени. Когда прогнозируемое положение P3 проезда перемещается в дальнюю сторону от центра запретной области R для проезда впоследствии, устройство 10 управления транспортным средством ускоряет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в дальнюю сторону. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда с ее дальней стороны.
[0056] Когда прогнозируемое положение P3 проезда находится в центре запретной области R для проезда, устройство 10 управления транспортным средством согласно первому варианту осуществления побуждает транспортное средство-носитель C1 двигаться с определенной скоростью в течение определенного периода времени. Когда прогнозируемое положение P3 проезда не перемещается от центра запретной области R для проезда впоследствии, устройство 10 управления транспортным средством согласно первому варианту осуществления замедляет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда с ее ближней стороны.
[0057] Когда существует находящееся впереди транспортное средство C4 на полосе транспортного средства-носителя, устройство 10 управления транспортным средством согласно первому варианту осуществления формирует профиль для скорости V1, которая позволяет расстоянию L2 между транспортными средствами, находящемуся между транспортным средством-носителем C1 и находящимся впереди транспортным средством C4 не уменьшаться до или ниже заданного значения. Устройство 10 управления транспортным средством вычисляет прогнозируемое положение P3 проезда с помощью этого профиля для скорости V1. Когда определяется, что прогнозируемое положение P3 проезда находится в запретной области R для проезда, устройство 10 управления транспортным средством управляет движением транспортного средства-носителя C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2, в то же время поддерживая расстояние L2 между транспортными средствами до находящегося впереди транспортного средства C4.
[0058] Устройство 10 управления транспортным средством согласно первому варианту осуществления расширяет запретную область R для проезда, добавляя допуск к дальней стороне запретной области R для проезда. Если прогнозируемое положение P3 проезда находится в допуске, устройство 10 управления транспортным средством замедляет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону, когда возможен сценарий, такой как следующий: находящееся впереди транспортное средство C4 замедляется резко, и транспортное средство-носитель C1 не может поддерживать расстояние L2 между транспортными средствами равным или выше заданного значения после проезда прогнозируемого положения P3 проезда. Это позволяет транспортному средству-носителю C1 проезжать встречное транспортное средство C2, в то же время поддерживая расстояние L2 между транспортными средствами равным или выше заданного значения.
[0059] Устройство 10 управления транспортным средством согласно первому варианту осуществления изменяет допуск согласно условиям движения на полосе транспортного средства-носителя. Таким образом, допуск может быть задан соответствующим образом, чтобы позволять транспортному средству-носителю C1 проезжать встречное транспортное средство C2 за пределами запретной области R для проезда, в то же время поддерживая расстояние L2 между транспортными средствами равным или выше заданного значения.
[0060] [Второй вариант осуществления]
Далее описан второй вариант осуществления настоящего изобретения. Второй вариант осуществления отличается от первого варианта осуществления в том, что контроллер 50 включает в себя модуль 57 изменения целевого положения проезда, как показано на фиг. 14. Во втором варианте осуществления те же компоненты, что и описанные в первом варианте осуществления, обозначаются теми же условными обозначениями, что и используемые в первом варианте осуществления, и не будут подробно описаны ниже.
[0061] Теперь приведено описание для модуля 57 изменения целевого положения проезда со ссылкой на фиг. 15. В сценарии, рассмотренном ниже, встречное транспортное средство C5 и встречное транспортное средство C6 следуют за встречным транспортным средством C2, как показано на фиг. 15, или, другими словами, существует множество встречных транспортных средств. Модуль 53 вычисления прогнозируемого положения проезда вычисляет прогнозируемое положение P3 проезда транспортного средства-носителя C1 для каждого из этих встречных транспортных средств. Модуль 57 изменения целевого положения проезда изменяет заданные целевые положения P4 проезда в ближнюю сторону или дальнюю сторону запретной области R для проезда согласно числу прогнозируемых положений P3 проезда, т.е. числу встречных транспортных средств. В частности, модуль 57 изменения целевого положения проезда может изменять целевые положения P4 проезда в ближнюю сторону, когда число встречных транспортных средств меньше заданного порогового значения, и изменяет целевые положения P4 проезда в дальнюю сторону, когда число встречных транспортных средств больше порогового значения. Например, в примере на фиг. 15, когда существуют три транспортных средства на встречной полосе, если пороговое значение задано в четыре, модуль 57 изменения целевого положения проезда изменяет целевые положения P4 проезда в ближнюю сторону так, что транспортное средство-носитель C1 может уступать путь встречным транспортным средствам. Это может предотвращать увеличение пробки, вызванное встречными транспортными средствами, ожидающими проезда припаркованного транспортного средства C3 на встречной полосе. Пороговое значение может изменяться согласно состоянию дороги.
[0062] [Третий вариант осуществления]
Далее описан третий вариант осуществления настоящего изобретения. Третий вариант осуществления отличается от первого варианта осуществления в том, что контроллер 50 включает в себя модуль 58 оценки положения остановки, как показано на фиг. 16. В третьем варианте осуществления те же компоненты, что и описанные в первом варианте осуществления, обозначаются теми же условными обозначениями, что и используемые в первом варианте осуществления, и не описаны подробно ниже.
[0063] Модуль 58 оценки положения остановки получает максимальное замедление встречного транспортного средства C2 с помощью, например, связи типа транспортное средство - транспортное средство с встречным транспортным средством C2 и оценивает положение кратчайшей остановки для встречного транспортного средства C2, если встречное транспортное средство C2 замедляется при своем максимальном замедлении. Модуль 58 оценки положения остановки затем выводит оцененное положение кратчайшей остановки встречного транспортного средства C2 в модуль 55 задания целевого положения проезда.
[0064] Затем, когда определяется, что оцененное положение кратчайшей остановки встречного транспортного средства C2 находится в центре запретной области R для проезда, т.е. встречное транспортное средство C2 не может остановиться на дальней стороне запретной области R для проезда даже с его максимальным замедлением, модуль 55 задания целевого положения проезда замедляет транспортное средство-носитель C1, чтобы перемещать прогнозируемое положение P3 проезда из запретной области R для проезда в ближнюю сторону. Это может предохранять транспортное средство-носитель C1 от блокирования пути движения встречного транспортного средства C2.
[0065] Модуль 58 оценки положения остановки может получать текущее замедление встречного транспортного средства C2 с помощью, например, связи типа транспортное средство - транспортное средство с встречным транспортным средством C2 и выводить это замедление в модуль 53 вычисления прогнозируемого положения проезда. Это позволяет модулю 53 вычисления прогнозируемого положения проезда вычислять прогнозируемое положение P3 проезда, в то же время принимая текущее замедление встречного транспортного средства C2 в рассмотрение. Когда прогнозируемое положение P3 проезда находится за пределами запретной области R с дальней ее стороны вследствие замедления встречного транспортного средства C2, определяется, что встречное транспортное средство C2 уступило путь транспортному средству-носителю C1. Таким образом, транспортное средство-носитель C1 может ускоряться и проезжать сбоку от припаркованного транспортного средства C3 быстро. Дополнительно, время ожидания для встречного транспортного средства C2 может быть сокращено.
[0066] Хотя варианты осуществления настоящего изобретения были описаны выше, описания и чертежи, которые составляют часть настоящего изобретения, не должны истолковываться как ограничивающие настоящее изобретение. Настоящее описание изобретения должно делать различные альтернативные варианты осуществления, примеры и технологии работы очевидными специалистам в области техники. Например, когда встречное транспортное средство C2 останавливается, модуль 53 вычисления прогнозируемого положения проезда может вычислять прогнозируемое положение P3 проезда посредством замены скорости V2 встречного транспортного средства C2 скорректированной скоростью V2'. Скорректированная скорость V2' может быть постоянной скоростью (10 км/ч) или может изменяться согласно периоду времени, в течение которого встречное транспортное средство C2 останавливается, или согласно условиям движения на полосе транспортного средства-носителя и встречной полосе. Это может предотвращать нахождение прогнозируемого положения P3 проезда на дальней стороне запретной области R для проезда и сокращать время ожидания для встречного транспортного средства C2.
[0067] Кроме того, когда транспортное средство-носитель C1 останавливается, модуль 53 вычисления прогнозируемого положения проезда может вычислять прогнозируемое положение P3 проезда посредством замены скорости V1 транспортного средства-носителя C1 скорректированной скоростью V1'. Скорректированная скорость V1' может быть постоянной скоростью (10 км/ч) или может изменяться согласно периоду времени, в течение которого транспортное средство-носитель C1 останавливается, или согласно условиям движения на полосе транспортного средства-носителя и встречной полосе. Это может предотвращать нахождение прогнозируемого положения P3 проезда на ближней стороне запретной области R для проезда и сокращать время ожидания для транспортного средства-носителя C1.
Перечень ссылочных позиций
[0068] 51 модуль обнаружения состояния транспортного средства (модуль обнаружения состояния)
52 модуль обнаружения состояния объекта (модуль обнаружения объектов)
53 модуль вычисления прогнозируемого положения проезда (модуль вычисления положения)
54 модуль задания запретной области (модуль задания области)
56 контроллер движения
58 модуль оценки положения остановки.
Изобретение относится к устройству управления транспортным средством. Устройство содержит модуль обнаружения состояния, модуль обнаружения объектов, модуль вычисления положения, модуль задания области и контроллер движения. Модуль обнаружения объектов выполнен с возможностью обнаружения положения и скорости транспортного средства-носителя. Модуль обнаружения объектов выполнен с возможностью обнаружения положения и скорости каждого из неподвижного объекта и движущегося объекта, которые находятся впереди. Модуль вычисления положения выполнен с возможностью вычисления положения проезда, в котором транспортное средство-носитель проезжает движущийся объект. Модуль задания области выполнен с возможностью задания области вокруг неподвижного объекта. Контроллер движения выполнен с возможностью управления движением транспортного средства, когда положение проезда находится в упомянутой области. Достигается повышение комфорта управления транспортным средством. 4 н. и 7 з.п. ф-лы, 25 ил.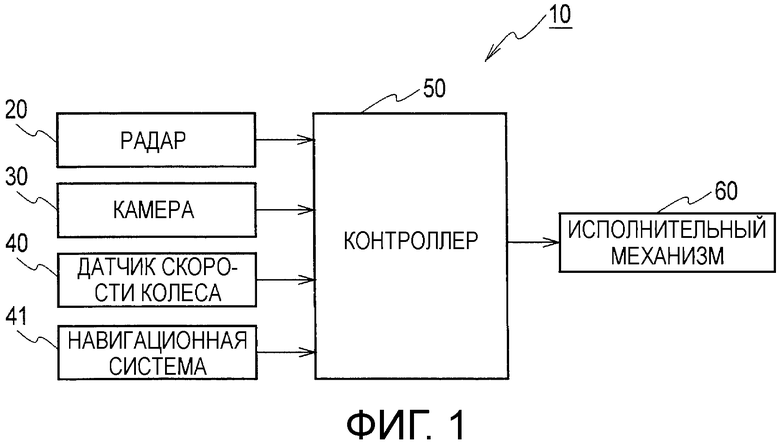
1. Устройство управления транспортным средством, содержащее:
модуль обнаружения состояния, выполненный с возможностью обнаружения положения и скорости транспортного средства-носителя;
модуль обнаружения объектов, выполненный с возможностью обнаружения положения и скорости каждого из неподвижного объекта и движущегося объекта, которые находятся впереди транспортного средства-носителя;
модуль вычисления положения, выполненный с возможностью вычисления положения проезда, в котором транспортное средство-носитель проезжает движущийся объект, на основании положения и скорости транспортного средства-носителя и положения и скорости движущегося объекта;
модуль задания области, выполненный с возможностью задания области вокруг неподвижного объекта; и
контроллер движения, выполненный с возможностью управления движением транспортного средства-носителя, когда положение проезда находится в упомянутой области, для перемещения положения проезда из упомянутой области,
причем когда положение проезда находится в центре области, контроллер движения побуждает транспортное средство-носитель двигаться с определенной скоростью в течение определенного периода времени, и
когда положение проезда перемещается по направлению к транспортному средству-носителю после упомянутого определенного периода времени, контроллер движения замедляет транспортное средство-носитель для перемещения положения проезда из упомянутой области по направлению к транспортному средству-носителю.
2. Устройство управления транспортным средством, содержащее:
модуль обнаружения состояния, выполненный с возможностью обнаружения положения и скорости транспортного средства-носителя;
модуль обнаружения объектов, выполненный с возможностью обнаружения положения и скорости каждого из неподвижного объекта и движущегося объекта, которые находятся впереди транспортного средства-носителя;
модуль вычисления положения, выполненный с возможностью вычисления положения проезда, в котором транспортное средство-носитель проезжает движущийся объект, на основании положения и скорости транспортного средства-носителя и положения и скорости движущегося объекта;
модуль задания области, выполненный с возможностью задания области вокруг неподвижного объекта; и
контроллер движения, выполненный с возможностью управления движением транспортного средства-носителя, когда положение проезда находится в упомянутой области, для перемещения положения проезда из упомянутой области,
причем когда положение проезда находится в центре области, контроллер движения побуждает транспортное средство-носитель двигаться с определенной скоростью в течение определенного периода времени, и
когда положение проезда перемещается по направлению к движущемуся объекту после упомянутого определенного периода времени, контроллер движения ускоряет транспортное средство-носитель для перемещения положения проезда из упомянутой области по направлению к движущемуся объекту.
3. Устройство управления транспортным средством, содержащее:
модуль обнаружения состояния, выполненный с возможностью обнаружения положения и скорости транспортного средства-носителя;
модуль обнаружения объектов, выполненный с возможностью обнаружения положения и скорости каждого из неподвижного объекта и движущегося объекта, которые находятся впереди транспортного средства-носителя;
модуль вычисления положения, выполненный с возможностью вычисления положения проезда, в котором транспортное средство-носитель проезжает движущийся объект, на основании положения и скорости транспортного средства-носителя и положения и скорости движущегося объекта;
модуль задания области, выполненный с возможностью задания области вокруг неподвижного объекта; и
контроллер движения, выполненный с возможностью управления движением транспортного средства-носителя, когда положение проезда находится в упомянутой области, для перемещения положения проезда из упомянутой области,
причем когда положение проезда находится в центре области, контроллер движения побуждает транспортное средство-носитель двигаться с определенной скоростью в течение определенного периода времени, и
когда положение проезда не перемещается после упомянутого определенного периода времени, контроллер движения замедляет транспортное средство-носитель для перемещения положения проезда из упомянутой области по направлению к транспортному средству-носителю.
4. Устройство управления транспортным средством, содержащее:
модуль обнаружения состояния, выполненный с возможностью обнаружения положения и скорости транспортного средства-носителя;
модуль обнаружения объектов, выполненный с возможностью обнаружения положения и скорости каждого из неподвижного объекта и движущегося объекта, которые находятся впереди транспортного средства-носителя;
модуль вычисления положения, выполненный с возможностью вычисления положения проезда, в котором транспортное средство-носитель проезжает движущийся объект, на основании положения и скорости транспортного средства-носителя и положения и скорости движущегося объекта;
модуль задания области, выполненный с возможностью задания области вокруг неподвижного объекта; и
контроллер движения, выполненный с возможностью управления движением транспортного средства-носителя, когда положение проезда находится в упомянутой области, для перемещения положения проезда из упомянутой области,
причем когда модуль обнаружения объектов обнаруживает находящееся впереди транспортное средство на полосе транспортного средства-носителя, модуль вычисления положения формирует профиль скорости транспортного средства-носителя, который позволяет расстоянию между транспортными средствами между транспортным средством-носителем и находящимся впереди транспортным средством быть равным или больше заданного значения, и вычисляет положение проезда с помощью этого профиля.
5. Устройство управления транспортным средством по любому из пп. 1-4, в котором
когда модуль обнаружения объектов обнаруживает множество движущихся объектов, модуль вычисления положения вычисляет положение проезда для каждого из движущихся объектов,
когда число движущихся объектов меньше заданного числа, контроллер движения замедляет транспортное средство-носитель для перемещения всех положений проезда из упомянутой области по направлению к транспортному средству-носителю, и
когда число движущихся объектов больше заданного числа, контроллер движения ускоряет транспортное средство-носитель для перемещения всех положений проезда из упомянутой области по направлению к движущимся объектам.
6. Устройство управления транспортным средством по любому из пп. 1-5, дополнительно содержащее:
модуль оценки положения остановки, выполненный с возможностью вычисления положения кратчайшей остановки движущегося объекта на основании скорости движущегося объекта и максимального замедления, заданного для движущегося объекта, при этом
когда положение кратчайшей остановки находится в центре области, контроллер движения замедляет транспортное средство-носитель для перемещения положения проезда из упомянутой области по направлению к транспортному средству-носителю.
7. Устройство управления транспортным средством по любому из пп. 1-5, дополнительно содержащее:
модуль оценки положения остановки, выполненный с возможностью вычисления положения остановки движущегося объекта на основании скорости движущегося объекта, определенной посредством модуля обнаружения объектов, и замедления движущегося объекта, при этом
когда положение остановки находится в области в положении ближе к движущемуся объекту, чем центр области, контроллер движения ускоряет транспортное средство-носитель для перемещения положения проезда из упомянутой области по направлению к движущемуся объекту.
8. Устройство управления транспортным средством по любому из пп. 1-7, в котором
когда движущийся объект останавливается, модуль вычисления положения вычисляет положение проезда, заменяя скорость движущегося объекта первой скорректированной скоростью.
9. Устройство управления транспортным средством по любому из пп. 1-8, в котором
когда транспортное средство-носитель останавливается, модуль вычисления положения вычисляет положение проезда, заменяя скорость транспортного средства-носителя второй скорректированной скоростью.
10. Устройство управления транспортным средством по п. 4, в котором
модуль задания области расширяет область, добавляя допуск к стороне движущегося объекта для упомянутой области.
11. Устройство управления транспортным средством по п. 10, в котором
модуль задания области задает допуск согласно условиям движения на полосе транспортного средства-носителя.
| WO 2013136870 A1, 19.09.2013 | |||
| JP 2013184563 A, 19.09.2013 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |

