Изобретение относится к топогеодезическому и навигационному обеспечению задачи инженерного обеспечения - устройства минно-взрывных заграждений (МВЗ), в частности к их фиксации.
Фиксация минно-взрывных заграждений - это привязка их к имеющимся на местности и топографических картах ориентирам для точного определения местоположения заграждений на карте и на местности, позволяющая обеспечивать безопасные действия своих войск, быстрое отыскивание установленных (разведанных) заграждений при их разминировании. При этом точность определения плоских прямоугольных координат фиксируемых точек и исходных ориентиров должна обеспечивать быстрое отыскивание границ МВЗ для его последующего преодоления или разминирования.
В настоящее время привязка МВЗ подразделениями инженерных войск производится следующими способами:
1. На основании азимутально-дальномерного принципа. Координаты фиксируемых точек вычисляются графическим или аналитическим способом по результатам инструментальных измерений дирекционных углов (магнитных азимутов) и расстояний между фиксируемыми точками и исходными ориентирами [2, 3]. Точность привязки с применением данных способов составляет 20-50 метров.
2. Привязка МВЗ применением навигационной аппаратуры потребителя (НАП) спутниковых навигационных систем (СНС), при которой координаты фиксируемых точек и исходных ориентиров определяются абсолютным методом определения координат [1]. Точность определения навигационных параметров соответствует техническим характеристикам применяемой навигационной аппаратуры и составляет 10-15 метров.
3. С помощью НАП на основе гирополукомпаса [1]. Так на гусеничные минные заградители (ГМЗ-3) устанавливается аппаратура ТНА-4 [5], точность определения местоположения которой составляет 1,2% от пройденного пути. Так при удалении рубежа минирования от исходного района заградителей 4-6 км погрешность определения координат будет составлять 50-70 м.
Каждые десять метров ошибки в определении координат фиксируемых точек МВЗ увеличивают площадь минной опасности на 10-25%. Поэтому возрастает актуальность вопросов разработки наиболее точных способов привязки МВЗ.
При этом наиболее точный относительный метод определения координат при привязке МВЗ не применяется. Точность данного метода значительно выше, чем в соответствующих вариантах абсолютного метода и может достигать от 0,1 до 5 метров, в зависимости от метода обработки и скорости перемещения [6, 7].
Поэтому предлагаемый способ привязки МВЗ с применением современной НАП СНС (для индивидуального пользования) с использованием относительного метода определения координат позволит повысить точность привязки МВЗ.
В основе данного способа лежит относительное постоянство значительной части погрешностей спутниковой навигационной системы во времени и в пространстве, а также их одинаковое значение для НАП (различных физически, но одинаковых конструктивно). Основными погрешностями определения псевдодальностей в СНС являются: ошибки синхронизации навигационного спутника; погрешности за счет ошибок эфемеридного обеспечения навигационного спутника; не скомпенсированные ионосферные погрешности [7]. Для снижения влияния данных ошибок производится коррекция полученных координат фиксируемых точек.
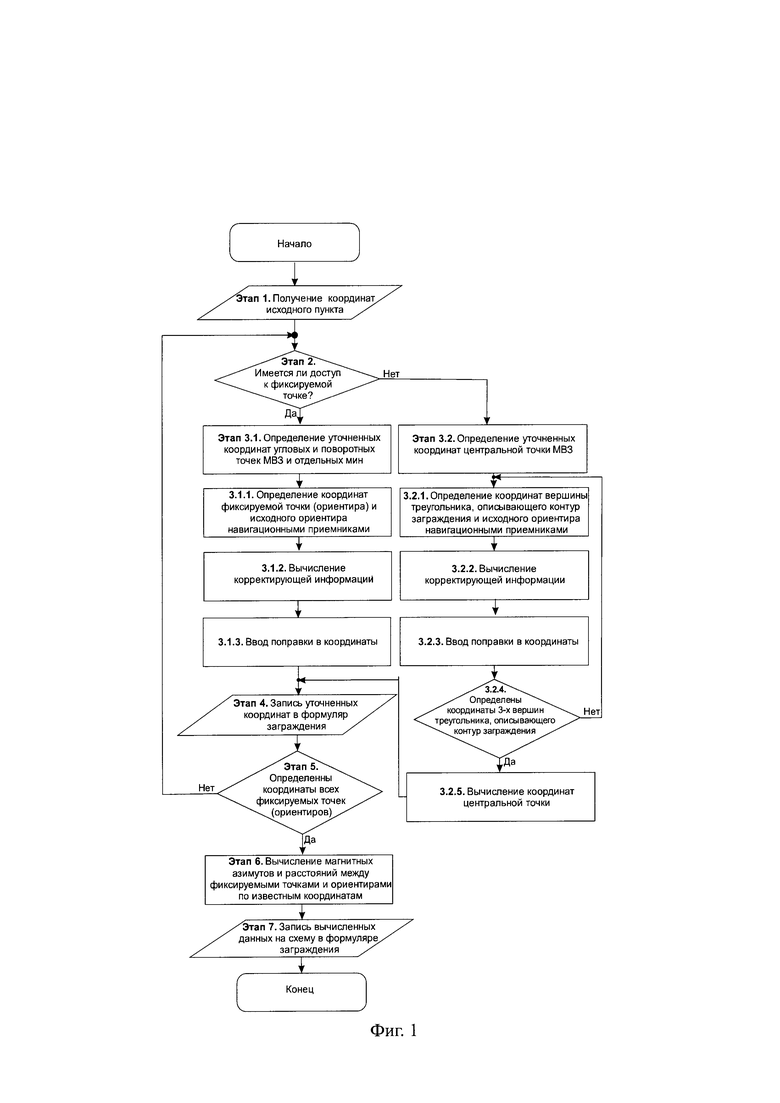
Структурно-логическая схема способа привязки МВЗ с применением НАП СНС (для индивидуального пользования) с использованием относительного метода определения координат представлена на фиг.1.
Привязка МВЗ данным способом производится расчетом из двух человек. Каждый номер расчета обеспечен спутниковым навигационным приемником. Первый номер расчета является подвижным объектом, а второй номер расчета - базовой станцией. Организация взаимодействия между ними производится по средствам связи.
За исходный пункт целесообразно принимать пункты ГГС, координаты которых выписываются из каталогов координат геодезических пунктов до начала привязки заграждений.
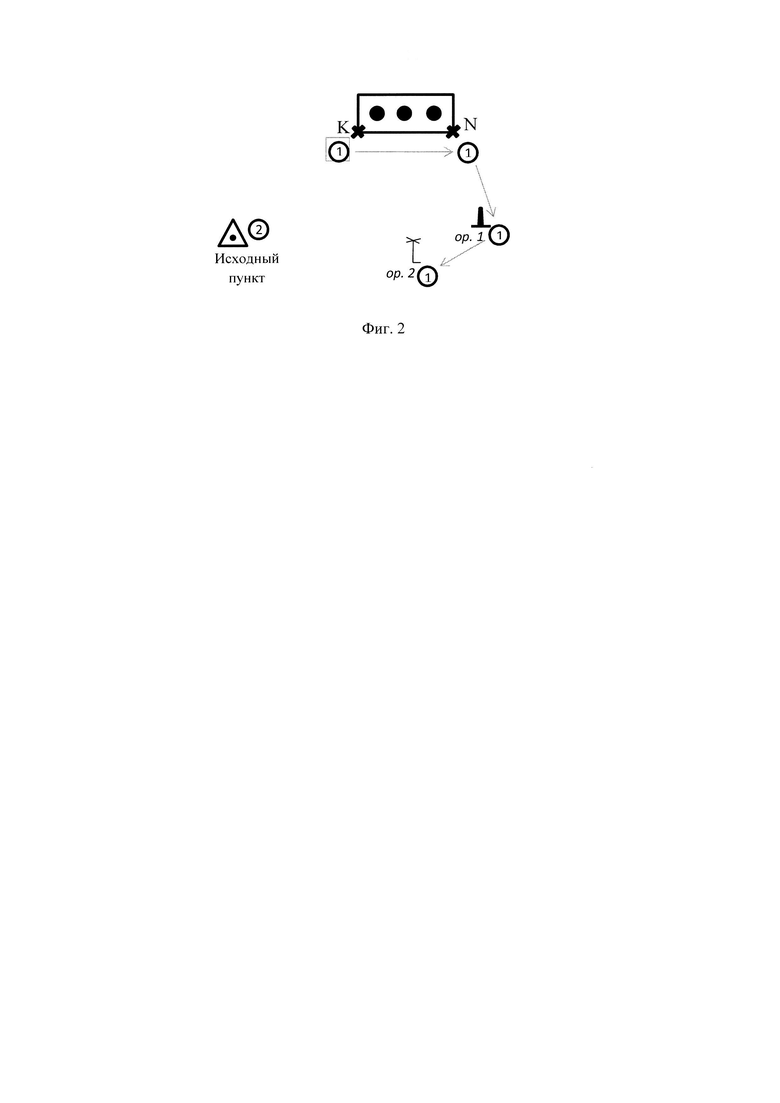
Порядок практических действий при привязке минно-взрывных заграждений с применением навигационной аппаратуры потребителя спутниковых навигационных систем (для индивидуального пользования) с использованием относительного метода определения координат показан на Фиг. 2, где: K, N - фиксируемые точки МВЗ; 1 - первый номер расчета; 2 - второй номер расчета.
Порядок практических действий членов расчета при привязке данным способом состоит из следующих этапов.
Этап 1. Получение координат исходного ориентира.
1.1. За исходные ориентиры целесообразно выбирать такие ориентиры координаты, которых определены с высокой точностью (например, пункты ГГС и сетей сгущения) используя каталоги координат геодезических спутников, карты геодезических данных и другие средства топогеодезической информации.
1.2. После получения координат исходного пункта Второй номер расчета прибывает на него и устанавливает навигационный приемник.
Этап 2. Выбор варианта определения координат фиксируемых точек МВЗ.
Первый номер расчета перед началом привязки определяет, имеется ли у него доступ к фиксируемой точке МВЗ. Так, в случае привязки угловых и поворотных точек тыльной границы МВЗ и отдельных мин доступ к ним имеется (п.3.1.), а в случае привязки группы мин с диаметром площади покрытия до 50 метров, когда фиксируется центральная точка МВЗ - доступа нет (п.3.2.).
Этап 3. Определение уточненных координат фиксируемых точек и ориентиров.
3.1. Определение уточненных координат угловых и поворотных точек тыльной границы МВЗ и отдельных мин.
3.1.1. Первый номер прибывает на фиксируемую точку МВЗ и по имеющимся средствам связи связывается со вторым номером. После этого он подает команду «Определить координаты!». После подачи и получения команды первый и второй номера одновременно определяют плоские прямоугольные координаты точек, на которых они находятся и сохраняют в памяти прибора (записывают в журнал).
3.1.2. Вычисление корректирующей информации.
Второй номер вычисляет поправку в координаты по формулам:

где хБС и уБС исх - плоские прямоугольные координаты исходного пункта;
хБС опр и уБС опр - плоские прямоугольные координаты исходного пункта определенные навигационным приемником абсолютным методом;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек.
Результаты вычислений по средствам связи передает первому номеру.
3.1.3. Ввод поправки в координаты.
Первый номер записывает полученную от второго номера поправку в журнал и вычисляет уточненные координаты фиксируемой точки по следующим формулам:

где хПО ист и уПО ист - уточненные плоские прямоугольные координаты фиксируемой точки (ориентира);
хПО опр и уПО опр - плоские прямоугольные координаты исходного пункта определенные навигационным приемником;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек.
Уточненные координаты записывает в формуляр заграждения.
3.2. Определение уточненных координат центральной точки МВЗ.
При определении уточненных координат центральной точки необходимо с помощью навигационного приемника определить координаты вершин треугольника описывающего контур МВЗ.
3.2.1. Первый номер прибывает на точку (одна из вершин треугольника описывающего МВЗ) и по имеющимся средствам связи связывается со вторым номером. После этого он, подает команду «Определить координаты!». После подачи и получения команды первый и второй номера одновременно определяют плоские прямоугольные координаты точек, на которых они находятся и сохраняют в памяти прибора (записывают в журнал).
3.2.2. Вычисление корректирующей информации.
Второй номер вычисляет поправку в координаты по формулам:

где хБС исх и уБС исх -плоские прямоугольные координаты исходного пункта;
хБС опр и уБС опр - плоские прямоугольные координаты исходного пункта определенные навигационным приемником абсолютным методом;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек.
Результаты вычислений по средствам связи передает первому номеру.
3.2.3. Ввод поправки в координаты.
Первый номер записывает полученную от второго номера поправку в журнал и вычисляет уточненные координаты фиксируемой точки по следующим формулам:

где хПО ист и уПО ист - уточненные плоские прямоугольные координаты фиксируемой точки (ориентира);
хПО опр и уПО опр - плоские прямоугольные координаты исходного пункта определенные навигационным приемником;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек.
3.2.4. Проверка в достаточности количества точек с определенными координатами.
Для определения уточненных координат оставшихся вершин перейти к п. 3.2.1. Если определены уточненные координаты всех вершин треугольника, описывающего МВЗ перейти к вычислению координат центральной точки.
3.2.5. Вычисление координат центральной точки.
Координаты центральной точки вычисляются по формулам:

хцт, уцт - координаты центральной точки;
x1, x2, х3 - координаты х вершин треугольника, описывающего контур МВЗ;
y1, y2, у3 - координаты х вершин треугольника, описывающего контур МВЗ.
Этап 4. Запись уточненных координат в формуляр заграждения.
Полученные уточненные координаты записываются в формуляр заграждения и наносятся на схему заграждения.
Этап 5. Определение достаточности фиксируемых точек и ориентиров, у которых были уточнены координаты.
Для определения координат оставшихся фиксируемых точек перейти к следующей фиксируемой точке и вернуться к этапу 2. После определения уточненных координат всех необходимых точек перейти к вычислению магнитных азимутов и расстояний между фиксируемыми точками и ориентирами.
Этап 6. Вычисление магнитных азимутов и расстояний между фиксируемыми точками и ориентирами.
Вычисление расстояний между ориентирами и фиксируемыми точками.

Вычисление дирекционных углов с ориентиров на фиксируемые точки


Четверть, в которой лежит направление, определяют по знакам разностей у2-y1 и х2-х1. При вычислении α1.2 по найденному tgα1.2 подыскивают из тригонометрических таблиц острый угол u и затем находят α1.2, пользуясь диаметром 0°-180° (см. табл.).
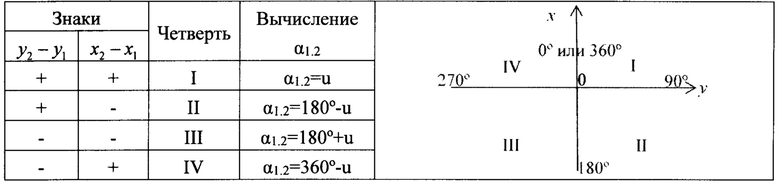
Переход от дирекционных углов к магнитным азимутам.

Правильность определения четверти, в которой лежит a 1.2, рекомендуется проверить по карте или схематическому чертежу.
Этап 7. Запись вычисленных значений магнитных азимутов и расстояний между фиксируемыми точками и ориентирами на схему привязки.
Рекомендации по реализации способа:
а) при перемещении номеров расчета их спутниковые навигационные приемники постоянно работают в абсолютном режиме;
б) второй номер расчета (базовая корректирующая станция) по такому же алгоритму может работать с несколькими расчетами.
Предложенный способ позволяет повысить точность привязки МВЗ, что в свою очередь сократит площадь минной опасности, обеспечит быстрое отыскивание МВЗ для последующего их преодоления или разминирования.
Список используемой литературы
1. С.Н. Попов, А.В. Каширов и др. Отчет о комплексной научно-исследовательской работе «Разработка и обоснование требований вида (рода войск) ВС РФ к топогеодезическому и навигационному обеспечению на период до 2030 года» (шифр «ТГНО-2030»). М.: ВУНЦ СВ «ОВА ВС РФ». 2014. С.87.
2. А.В. Нижаловский, B.C. Гаваза и др. Рекомендации по устройству, фиксации, учету, содержанию и уничтожению (снятию) противопехотных минно-взрывных заграждений. Учебно-методическое пособие. М.: ВИА. 1998. С.80.
3. A.M. Гребенюк, Н.И. Каленик. Фиксация минно-взрывных заграждений. Учебное пособие. М. М.: ВИА. 1988. С.176.
4. Навигационная аппаратура потребителей глобальных навигационных систем ГЛОНАСС и GPS для индивидуального пользования «Орион». Руководство по эксплуатации. ТДЦК.461513.104 РЭ. 2016. С.217.
5. Ю.М. Ставицкий, А.Н. Нестеренко, Р.С. Алахвердиев и др. Средства инженерного вооружения. Каталог. Книга 1. Издание третье, дополненное и переработанное. М.: ЦНИИИ ИВ. 2014. С.392.
6. К.М. Антонович. Использование спутниковых радионавигационных систем в геодезии. В 2 т. Т. 2. Монография. М.: ФГУП «Картгеоцентр», 2006. С.360.
7. К.В. Малец, С.А. Смирнов и др. Координатно-временное и навигационное обеспечение Вооруженных Сил Российской Федерации в мирное время. Учебное пособие. М.: ВУНЦ СВ «ОВА ВС РФ». 2019. С.263.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2002 |
|
RU2215264C1 |
| Способ определения координат пунктов навигационно-геодезической сети | 1990 |
|
SU1782315A3 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ ПОМОЩИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ КОСМИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2070315C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| СПОСОБ РЕШЕНИЯ СПЕЦИАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ ЗАДАЧ | 2011 |
|
RU2470261C1 |
Способ привязки минно-взрывных заграждений (МВЗ) с применением навигационной аппаратуры потребителя (НАП) индивидуального пользования спутниковых навигационных систем (СНС) относительным методом определения координат относится к топогеодезическому и навигационному обеспечению задачи инженерного обеспечения - устройства МВЗ, в частности к их фиксации. Фиксация МВЗ - это привязка их к имеющимся на местности и топографических картах ориентирам для точного определения местоположения заграждений на карте и на местности, позволяющая обеспечивать безопасные действия своих войск, быстрое отыскивание установленных (разведанных) заграждений при их разминировании. В основе данного способа лежит относительное постоянство значительной части погрешностей СНС во времени и в пространстве, а также их одинаковое значение для НАП. Для снижения влияния данных погрешностей производится коррекция полученных координат фиксируемых точек МВЗ. Способ состоит из следующих этапов.
Этап 1. Получение координат исходного ориентира.
Этап 2. Выбор варианта определения координат фиксируемых точек.
Этап 3. Определение уточненных координат фиксируемых точек и ориентиров.
Этап 4. Запись уточненных координат в формуляр заграждения.
Этап 5. Определение достаточности фиксируемых точек и ориентиров, у которых были уточнены координаты.
Этап 6. Вычисление магнитных азимутов и расстояний между фиксируемыми точками и ориентирами.
Этап 7. Запись вычисленных значений магнитных азимутов и расстояний между фиксируемыми точками и ориентирами на схему привязки.
Технический результат - предложенный способ позволяет повысить точность привязки МВЗ, что, в свою очередь, сократит площадь минной опасности, обеспечит быстрое отыскивание минно-взрывных заграждений для последующего их преодоления или разминирования. 2 ил.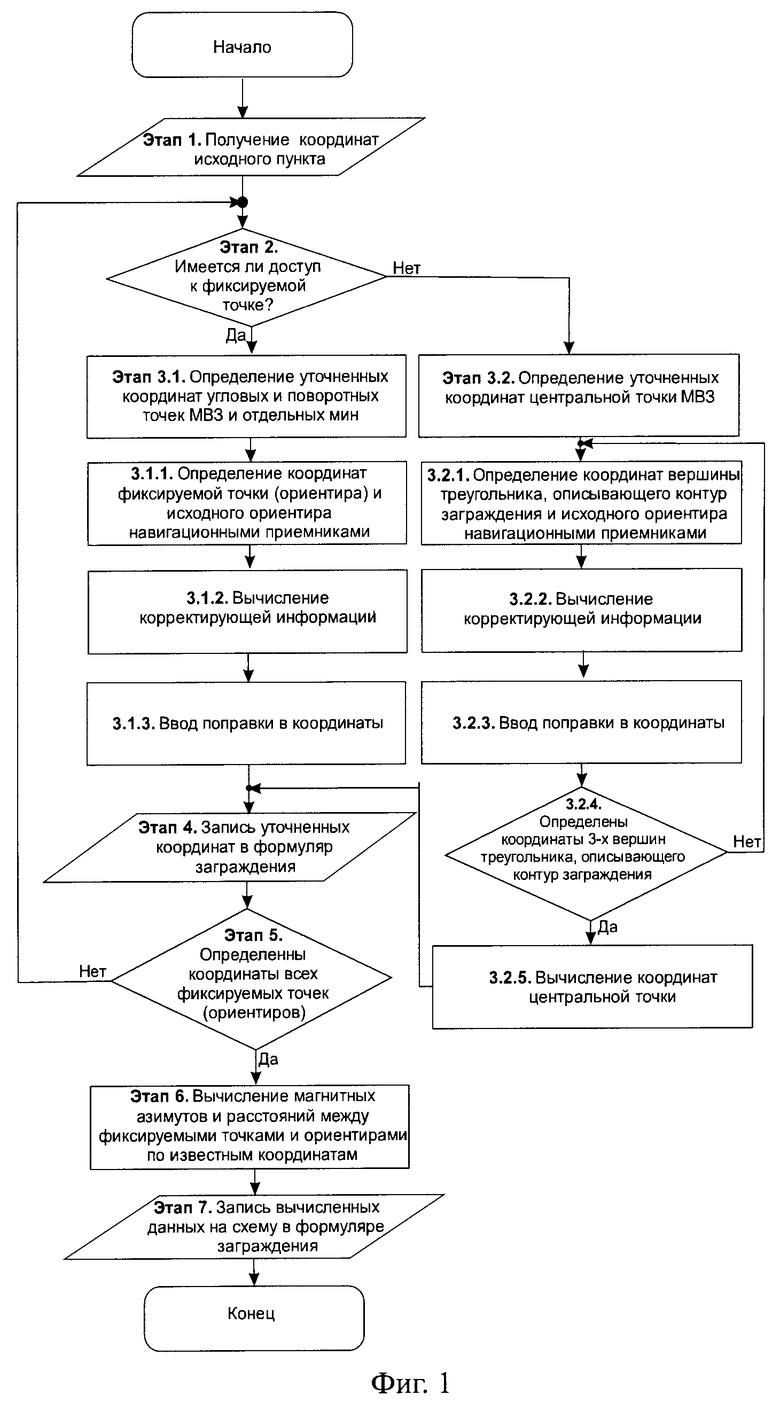
Способ привязки минно-взрывных заграждений с применением навигационной аппаратуры потребителя спутниковых навигационных систем для индивидуального пользования, включающий определение координат фиксируемых точек минно-взрывного заграждения относительным методом определения координат, который включает получение плоских прямоугольных координат исходного пункта, используя каталоги координат геодезических пунктов или карт геодезических данных, определение плоских прямоугольных координат исходного пункта и фиксируемых точек минно-взрывного заграждения навигационным приемником абсолютным методом определения координат, определение корректирующей поправки по формулам:
dx отн = xБС исх - xБС опр
dy отн = yБС исх – yБС опр,
где xБС исх и уБС исх - плоские прямоугольные координаты исходного пункта;
xБС опр и yБС опр - плоские прямоугольные координаты исходного пункта определенные навигационным приемником абсолютным методом;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек,
ввод поправки в координаты и определение уточненных плоских прямоугольных координат фиксируемых точек по следующим формулам:
xПО = xПO опр + dx отн
yПО = yПО опр + dy отн,
где хПO ист и yПO ист - уточненные плоские прямоугольные координаты фиксируемой точки;
xПO опр и yПО опр - плоские прямоугольные координаты исходного пункта, определенные навигационным приемником;
dx отн и dy отн - полученные поправки в плоские прямоугольные координаты фиксируемых точек, причем после определения координат фиксируемых точек минно-взрывного заграждения производят вычисления магнитных азимутов и расстояний между фиксируемыми точками и исходным пунктом.
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2013 |
|
RU2517176C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| US 20200257002 A1, 13.08.2020 | |||
| WO 2017177951 A1, 19.10.2017 | |||
| Способ определения координат пунктов навигационно-геодезической сети | 1990 |
|
SU1782315A3 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |

