Область техники
Изобретение относится к системе постановки воздушного судна на место стоянки, расположенной на месте стоянки, упомянутая система содержит средство определения расстояния, выполненное с возможностью определять, по меньшей мере, расстояние между системой и воздушным судном.
Описание предшествующего уровня техники
В последние годы в аэропортах увеличилась потребность в эффективной работе, и вместе с этим во многих аэропортах возникла потребность заменить ручное управление движением воздушного судна к месту посадки и высадки автоматической системой постановки воздушного судна на место стоянки.
Автоматические системы постановки на место стоянки обычно основаны на методиках, на которые в большей или меньшей степени влияет ограниченная видимость, например, из-за тумана и осадков. Выражение "видимость" следует понимать как атмосферное пропускание электромагнитного излучения на соответствующей длине волны. Один пример такой системы раскрывается в патенте США № 6563432, в котором система для обнаружения и определения расстояния до воздушного судна сканирует область места посадки и высадки с помощью лазерных импульсов. Отраженные лазерные импульсы анализируются с целью обнаружения твердых объектов, а также отличия твердых объектов от тумана или осадков.
Другой пример автоматической системы постановки на место стоянки, на которую влияют условия видимости, раскрывается в патенте США № 6542086. Система в патенте США № 6542086 использует видеокамеру в качестве датчика.
Недостаток таких систем состоит в том, что они не всегда делают возможной постановку на место стоянки во всех погодных условиях, во время которых аэропорт открыт для перевозок. Воздушное судно может нуждаться в наведении на расстоянии 80-100 метров от ближайшего местоположения, в котором может быть установлена система постановки на место стоянки, обычно в месте посадки и высадки, в то время как аэропорт может еще быть открыт для перевозок при видимости менее 80-100 метров. В результате этого в условиях, когда автоматическая постановка на место стоянки невозможна из-за тумана или осадков, постановка на место стоянки должна выполняться сигнальщиками вручную. Проблема в такой ситуации состоит в том, что потребность в ручном управлении движением на земле может не являться очевидной, пока воздушное судно не приблизится к месту посадки и высадки, и окажется, что туман или осадки слишком сильны, чтобы система постановки на место стоянки могла дать наведение. В большом аэропорту это может случиться одновременно в нескольких местах посадки и высадки и, поскольку это не запланировано, может вызвать нарушения работы аэропорта и такие связанные проблемы, как дополнительные расходы или уменьшение безопасности.
Хотя система, раскрытая в патенте США № 6563432, обнаруживает, идентифицирует и ставит воздушные судна на стоянку, а также определяет, является ли обнаруженный объект твердым объектом или присутствует туман или осадки, она не определяет, является ли автоматическая постановка на место стоянки возможной или невозможной.
Обычно измерение видимости выполняется в аэропортах при помощи измерителей дальности видимости, расположенных вблизи от взлетно-посадочных полос. Однако выходные данные существующих измерителей дальности видимости обычно не дают полные сведения об условиях возле систем постановки на место стоянки, поскольку они обычно располагаются в местах посадки и высадки в непосредственной близости от зданий терминалов и поскольку плотность тумана обычно значительно варьируется на территории аэропорта. Кроме того, установка такого измерителя дальности видимости в каждом месте посадки и высадки не является оптимальным решением. Выходные данные измерителя по-прежнему не смогут давать полные сведения об условиях, обуславливающих производительность системы постановки на место стоянки, поскольку туман часто присутствует небольшими участками и поскольку рабочая зона для системы представляет собой сектор, простирающийся приблизительно на 100 метров от системы. Другой недостаток такого решения состоит в дополнительных расходах на обеспечение множества дорогих измерителей дальности видимости.
Сущность изобретения
Следовательно, из изложенного выше описания недостатков, относящихся к системам предшествующего уровня техники, оказывается, что в области техники существует потребность в системе постановки воздушного судна на место стоянки со способностью определять, позволяют ли условия видимости осуществить постановку на место стоянки с помощью системы или нет.
Поэтому задача настоящего изобретения состоит в том, как выполнить систему постановки на место стоянки с возможностью определять условия видимости в пределах ее рабочей области и выдавать сигнал, когда эти условия больше не позволяют осуществлять постановку на место стоянки с помощью системы.
Для выполнения этой задачи настоящее изобретение обеспечивает в первой особенности систему постановки воздушного судна на место стоянки, выполненную с возможностью размещения на месте стоянки. Система содержит средство определения расстояния, выполненное с возможностью определять с использованием средства приема сигнала электромагнитного излучения, по меньшей мере, расстояние между системой и воздушным судном. Средство определения расстояния дополнительно выполнено с возможностью измерять, по меньшей мере, одно свойство сигнала приемника, принимаемого упомянутым средством приема сигнала, упомянутое свойство имеет отношение к видимости на месте стоянки, сравнивать упомянутую меру, по меньшей мере, одного свойства сигнала приемника с пороговым значением и в зависимости от упомянутого сравнения выдавать сигнал, указывающий, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки на место стоянки с помощью системы.
Во второй особенности изобретение обеспечивает способ управления постановкой воздушного судна на место стоянки в системе постановки воздушного судна на место стоянки, расположенной на месте стоянки. Система содержит средство определения расстояния, выполненное с возможностью определять с использованием средства приема сигнала электромагнитного излучения, по меньшей мере, расстояние между системой и воздушным судном, и средство определения расстояния выполняет этапы, на которых измеряют, по меньшей мере, одно свойство сигнала приемника, принимаемого упомянутым средством приема сигнала, упомянутое свойство имеет отношение к видимости на месте стоянки, сравнивают упомянутую меру, по меньшей мере, одного свойства сигнала приемника с пороговым значением и в зависимости от упомянутого сравнения выдают сигнал, указывающий, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки на место стоянки с помощью системы.
В третьей особенности изобретение обеспечивает компьютерную программу, содержащую программные команды, которые при исполнении на компьютере выполняют рассмотренный выше способ.
В четвертой особенности изобретение обеспечивает использование системы постановки воздушного судна на место стоянки для управления операциями в аэропорту.
Другими словами, система в соответствии с настоящим изобретением выполнена с возможностью проверять условия видимости рабочей области системы постановки на место стоянки перед и/или во время постановки воздушного судна на место стоянки. Система измеряет характеристики, которые имеют отношение к видимости на месте стоянки и которые ограничивают производительность системы. Результаты измерений используются в качестве определяющего фактора при определении, позволяют ли условия видимости осуществить безопасную постановку на место стоянки или нет.
Преимущество настоящего изобретения, таким образом, состоит в том, что оно дает оператору аэропорта расширенные возможности определить, возможно ли выполнить операцию постановки на место стоянки, когда видимость понижается до такой степени, что существует неопределенность, возможна ли безопасная постановка на место стоянки или нет. Например, системы предшествующего уровня техники обычно неспособны отличить густой туман или осадки от частей приближающегося воздушного судна. Само собой разумеется, такая нехватка способности различения может привести к опасным ситуациям. С другой стороны, системы предшествующего уровня техники могут быть выполнены с возможностью учитывать такую нехватку способности различения и просто выдавать сигнал о том, что постановка на место стоянки невозможна, когда система испытывает неопределенность. Однако это означает, что пригодность систем предшествующего уровня техники не столь высока, как пригодность системы в соответствии с настоящим изобретением.
Кроме того, преимущество состоит в том, что возможно в реальном времени и непрерывно определять, делает ли плотность тумана или осадков невозможной автоматическую постановку на место стоянки, и информировать об этом диспетчеров. Потребность в ручном управлении движением на земле может быть предвидена, и, таким образом, сигнальщики могут быть на своем месте, когда прибывает воздушное судно, и можно избежать нарушений в виде задержек постановки на место стоянки. Тем самым достигается эффективная работа аэропорта, что выражается, например, в меньшем количестве времени ожидания воздушного судна и более быстром и, следовательно, более эффективном размещении прибывающего воздушного судна по местам посадки и высадки и терминалам, когда возможна автоматическая постановка на место стоянки.
Еще одно преимущество изобретения состоит в том, что посредством обеспечения рассмотренного выше решения проблем уже существующая система постановки на место стоянки может быть адаптирована для обеспечения сигнала, показывающего условия видимости на месте стоянки. Обычно реализация повлечет за собой только перепрограммирование программного обеспечения управления в системе, что означает большую экономию стоимости по сравнению с ситуацией, в которой была бы необходима отдельная система видимости. Нет необходимости адаптировать какое-либо аппаратное оборудование существующей системы постановки на место стоянки, поскольку диапазон длин волн, в котором работает система постановки на место стоянки, является также подходящим для операции в связи с определением условий видимости.
В вариантах воплощения изобретения средство определения расстояния выполнено с возможностью измерять свойства сигнала приема в отношении рассеивания электромагнитного излучения. Например, средство определения расстояния может содержать средство определения дальности с помощью лазера, и тогда средство определения расстояния может быть выполнено с возможностью измерять рассеивание лазерного излучения.
В качестве альтернативы средство определения расстояния может содержать радиолокационное дальномерное средство, и тогда средство определения расстояния может быть выполнено с возможностью измерять рассеивание излучения радиолокатора. В дополнительных вариантах воплощения электромагнитное излучение обратного рассеяния, или более точно распределение мощности излучения обратного рассеяния, указывает рассеяние.
В дополнительных вариантах воплощения средство определения расстояния содержит средство приема сигнала, содержащее средство формирования изображения, выполненное с возможностью обеспечивать двухмерные изображения места стоянки, причем средство определения расстояния выполнено с возможностью измерять, по меньшей мере, одно свойство сигнала приемника, по меньшей мере, относящееся к различию контрастности, по меньшей мере, между двумя областями в пределах изображения. Эти области изображения могут соответствовать заранее заданным местоположениям на месте стоянки, предпочтительно находящимся на одинаковом расстоянии от системы.
Другими словами, когда система постановки на место стоянки использует методику формирования двухмерных изображений, мерой видимости является контрастность изображения. Анализ сигнала изображения, используемого для определения местоположения воздушного судна, и определение ухудшения этого сигнала, вызванного туманом или осадками, обеспечивает хорошую индикацию относительно того, превышает ли ухудшение видимости тот уровень, выше которого постановка на место стоянки является опасной или даже невозможной.
Средство формирования изображений может быть выполнено с возможностью обнаруживать электромагнитное излучение либо в оптическом диапазоне длин волн, либо в инфракрасном диапазоне длин волн, а также обнаруживать электромагнитное излучение в обоих этих диапазонах длин волн.
Краткое описание чертежей
Теперь изобретение будет описано более подробно со ссылкой на приложенные чертежи.
Фиг.1 схематично иллюстрирует места стоянки, на которых размещены системы постановки на место стоянки в соответствии с изобретением.
Фиг.2a схематично иллюстрирует систему постановки на место стоянки в соответствии с первым вариантом воплощения настоящего изобретения.
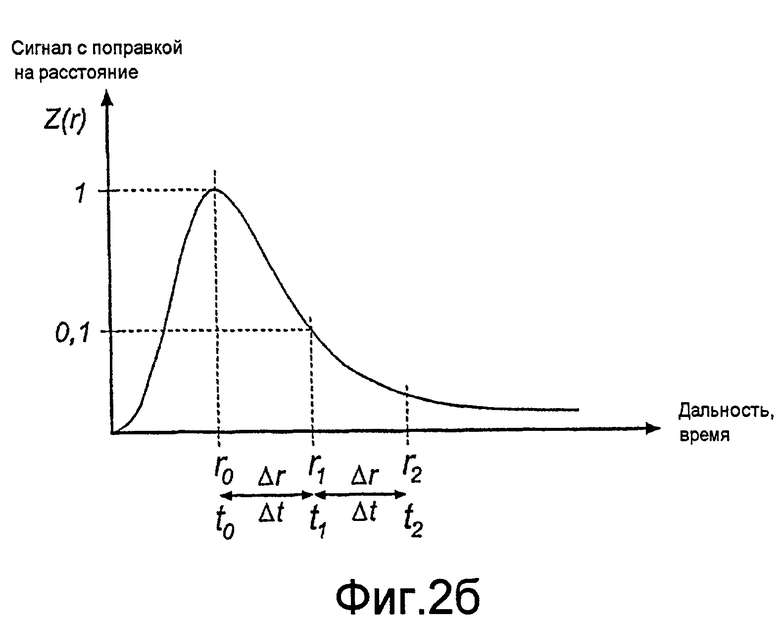
Фиг.2b является графиком кривой отклика, относящейся к отраженному электромагнитному импульсу в тумане.
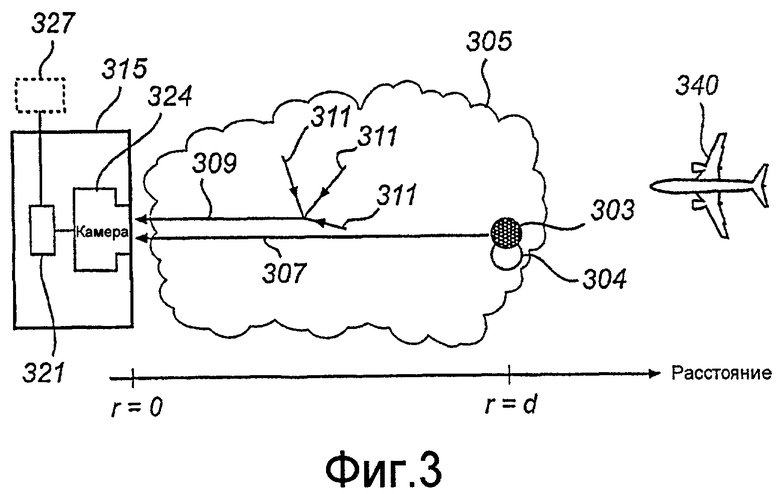
Фиг.3 схематично иллюстрирует систему постановки на место стоянки в соответствии со вторым вариантом воплощения настоящего изобретения.
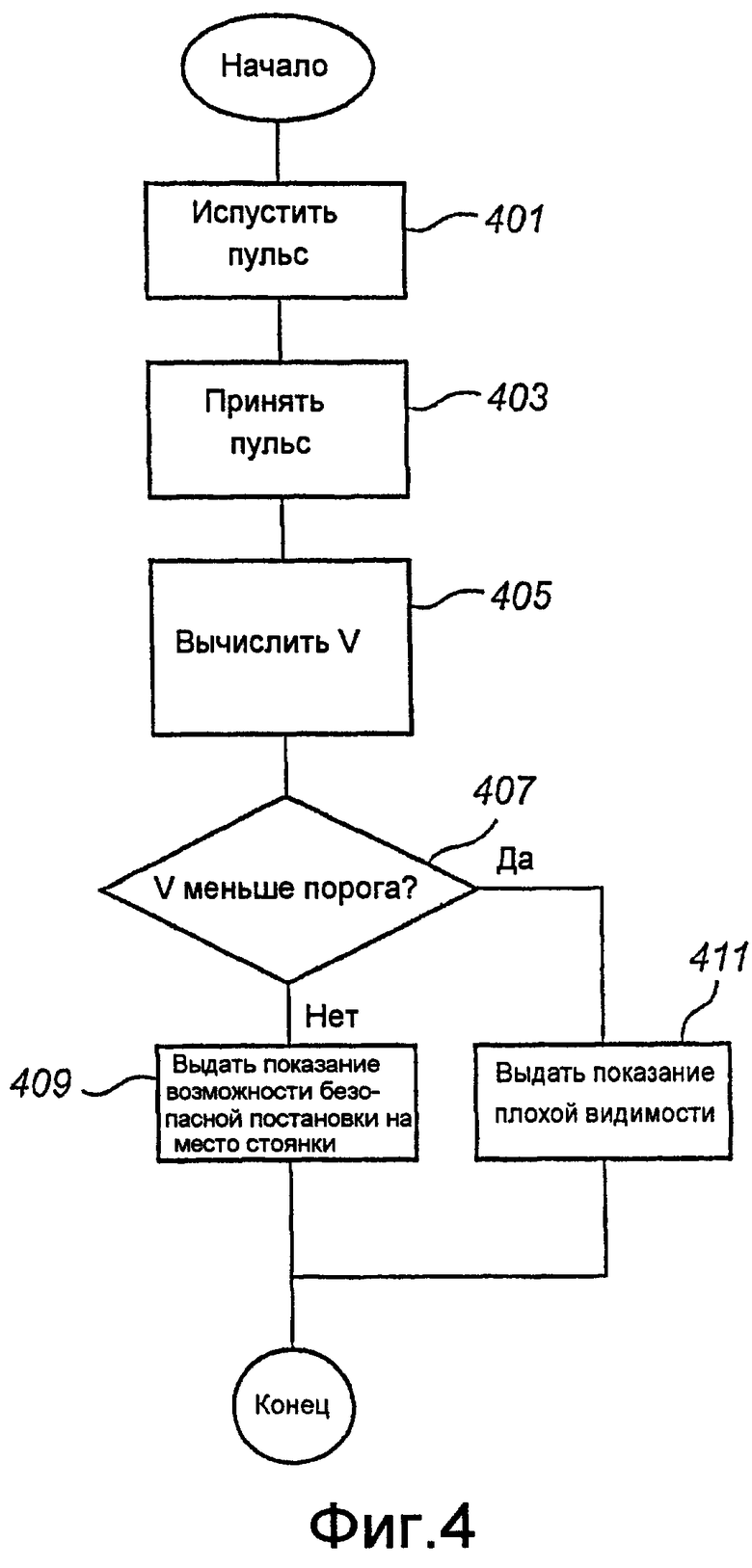
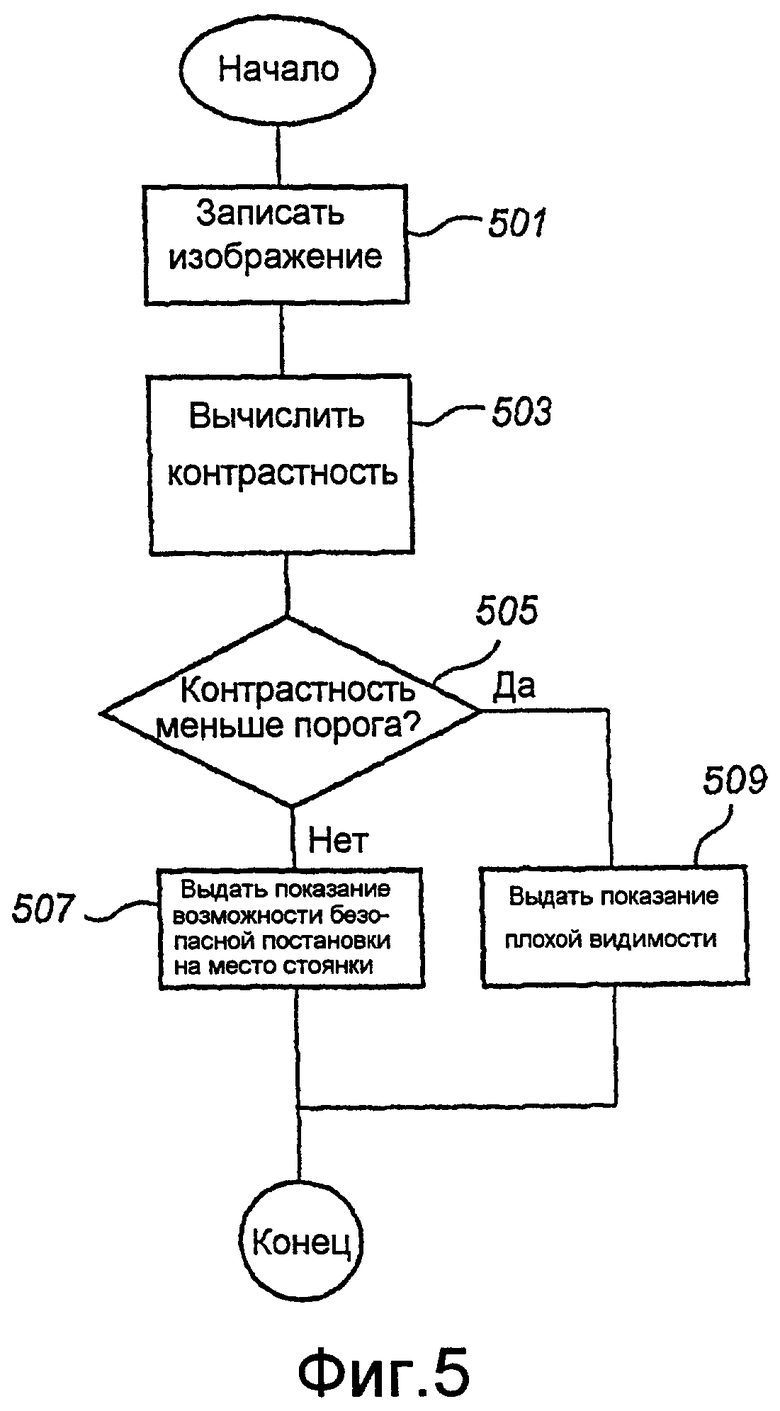
Фиг.4 и 5 являются блок-схемами последовательности операций способов в соответствии с изобретением.
Предпочтительные варианты воплощения
Фиг.1 схематично иллюстрирует вид сверху на ситуацию в аэропорту. Терминал 101, который может являться пассажирским терминалом и/или грузовым терминалом, оборудован первой системой 115 постановки воздушного судна на место стоянки и второй системой 117 постановки воздушного судна на место стоянки. Первое место 103 стоянки и второе место 105 стоянки расположены около каждой из систем 115, 117 постановки на место стоянки соответственно. Хотя места стоянки обозначены на фиг.1 пунктирными линиями, эти линии не должны представлять собой фактическую разметку на поверхности земли, а их следует воспринимать как помощь при прочтении настоящего описания.
Кроме того, хотя фиг.1 показывает, что обе системы 115, 117 постановки на место стоянки присоединены к терминалу 101, альтернативные конфигурации включают в себя такие случаи, когда система постановки на место стоянки непосредственно не присоединена к терминалу, а присоединена к любому другому подходящему средству на месте стоянки. Фактически место стоянки может не быть непосредственно привязано к конкретному терминалу и также может быть привязано к назначенному месту стоянки в любом месте аэропорта, где работа аэропорта предусматривает постановку на место стоянки.
Ситуация, проиллюстрированная на фиг.1, является такой, в которой первое воздушное судно 111 приближается к первому месту 103 стоянки вдоль направляющей линии 107 на поверхности земли. Второе воздушное судно 113 располагается во втором месте 105 стоянки после выполнения успешной операции постановки на место стоянки и соединено с терминалом 101 через пассажирский мост 109.
Первое место 103 стоянки в большой степени покрыто туманом 119. Туман 119 простирается в трех пространственных направлениях в атмосфере на месте стоянки и должен быть распознан как потенциальное препятствие, которое может помешать безопасной постановке на место стоянки первого воздушного судна 111 по мере его приближения к первой системе 115 постановки на место стоянки.
Как известно, туман или осадки влияют на видимость главным образом тем, что падающее электромагнитное излучение рассеивается капельками в атмосфере. Во время процесса рассеяния светящиеся капельки повторно испускают некоторую часть падающего электромагнитного излучения во всех направлениях. То есть капельки ведут себя как точечные источники повторно испускаемого излучения. Некоторая часть падающего электромагнитного излучения рассеивается обратно к источнику излучения в зависимости от соотношения между размером капельки и длиной волны излучения. Соотношение между видимостью и рассеянным электромагнитным излучением широко описано в литературе, например в статье “Ground-based remote sensing of visual range / Visual-range lidar” ("Наземные дистанционные измерения дальности видимости / оптический лазерный локатор"), Verein Deutscher Ingenieure VDI 3786, или в книге “Elastic Lidar: Theory, practice and analysis methods” ("Гибкий лазерный локатор: теория, практика и способы анализа"), V.A.Kovalev, W.E.Eichinger, Hoboken, N.J., Wiley, 2004.
Для систем постановки на место стоянки, полагающихся на средство электромагнитного излучения, например, для испускания импульсов, рассеяние уменьшает количество принимаемой энергии, отражаемой обнаруживаемыми объектами. Для систем постановки на место стоянки, полагающихся на средство формирования изображений, рассеяние вызывает уменьшение контрастности в используемом изображении.
С помощью фиг.2a и 2b будет описана система 215 постановки на место стоянки, которая использует электромагнитное излучение в виде испускания импульсов и приема излучения обратного рассеивания этих импульсов. Система 215 постановки на место стоянки выполнена с возможностью определять в реальном времени расстояния до приближающегося воздушного судна 240, а также выполнена с возможностью показывать, достаточно ли хороша видимость на месте стоянки, расположенном между системой 215 постановки на место стоянки и приближающимся воздушным судном 240, для возможности безопасной постановки воздушного судна 240 на место стоянки.
Система 215 постановки на место стоянки на фиг.2a, которая может представлять собой любую из систем 115, 117 постановки на место стоянки, рассмотренных выше в связи с фиг.1, содержит блок 221 управления, передатчик 223 и приемник 225. Передатчик 223 выполнен с возможностью под управлением блока 221 управления испускать импульсы электромагнитного излучения в виде лазерного излучения (хотя другие варианты воплощения могут содержать пару передатчик/приемник, которая выполнена с возможностью работать с радиолокационными импульсами). Излучение исходит от передатчика в виде луча 229 передачи вдоль направления 230 луча передачи, как схематично проиллюстрировано на фиг.2a. Соответственно приемник выполнен с возможностью также под управлением блока 221 управления принимать излучение обратного рассеяния в луче 231 приема вдоль направления 232 луча приема и выдавать сигнал, представляющий излучение обратного рассеяния, блоку 221 управления.
Передатчик 223 и приемник 225 выполнены таким образом, что они через устройство 226 направления луча, управляемое блоком 221 управления, могут быть направлены в любом желаемом пространственном направлении. Как поймет специалист, устройство 226 направления луча может быть реализовано в виде зеркал, шаговых двигателей и т.д.
Система 215 постановки на место стоянки, как обозначено на фиг.1, может являться частью большей системы, размещенной в терминале аэропорта, и также может быть соединена с внешней системой 227 управления, управляемой сотрудниками аэропорта.
Далее следует описание, как работает система 221 постановки на место на фиг.2, чтобы обеспечить индикацию относительно того, возможна ли безопасная постановка на место стоянки, в которой при определении расстояния системы 221 постановки на место стоянки используется передатчик 223 и приемник 225 для испускания и приема электромагнитных импульсов в виде либо лазерных импульсов, либо радиолокационных импульсов. Также будет сделана ссылка на блок-схему последовательности операций на фиг.4.
График на фиг.2b показывает типовое распределение Z(r) мощности сигнала приемника системы с поправкой на дальность, когда импульс был испущен на этапе 401 испускания в направлении однородного тумана и излучение обратного рассеяния было принято приемником 225 на этапе 403 приема в виде сигнала приемника, имеющего распределение P(r) мощности. Затем следует этап 405 вычисления, во время которого вычисляется значение для видимости V.
На этапе 405 вычисления распределение Z(r) мощности с поправкой на дальность первоначально вычисляется как Z(r)=r2*P(r) для компенсации ослабления сигнала приемника на больших расстояниях как 1/r2, где r - расстояние между передатчиком/приемником и отражающим/рассеивающим объектом.
Затем вычисляется видимость V на основе сигнала Z(r) приемника с поправкой на дальность, например, с использованием алгоритма, раскрытого в патенте DE 19642967, или с использованием так называемого способа асимптотического приближения. Согласно этому способу видимость V может быть вычислена посредством выражения
где c - скорость света,
 ,
,
 ,
,
r0 - расстояние, на котором поле обзора передатчика и приемника начинает полностью перекрываться,
r1 - расстояние, на котором сигнал спадает до 10% от максимального значения на расстоянии r0, и
r2=r1-r0.
Время интегрирования для Ir1 составляет от t0 до t1=t0+Δt, и время интегрирования для Ir2 составляет от t1 до t2=t1+Δt, где t0, t1, t2 и Δt относятся к r0, r1, r2 и Δr, как определено на фиг.2b.
Затем на этапе 407 сравнения вычисленная видимость V сравнивается с заранее заданным пороговым значением, чтобы выдать индикацию, т.е. сигнал, возможна ли постановка на место стоянки. Конкретные значения для порога определяются, например, опытным путем. Если видимость V больше порогового значения, на этапе 409 индикации выдается индикация, что видимость является хорошей и возможна безопасная постановка на место стоянки. Если, с другой стороны, видимость V является меньше порогового значения, на этапе 411 индикации выдается индикация, что видимость является плохой и безопасная постановка на место стоянки невозможна.
Теперь со ссылкой на фиг.3 будет описана система 315 постановки на место стоянки, которая использует средства формирования изображений в виде камеры 324. Как в предыдущем варианте воплощения, система 315 постановки на место стоянки выполнена с возможностью в реальном времени определять расстояния до приближающегося воздушного судна, а также выполнена с возможностью показывать, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки воздушного судна 340 на место стоянки.
Система 315 постановки на место стоянки на фиг.3, которая может представлять собой любую из систем 115, 117 постановки на место стоянки, рассмотренных выше в связи с фиг.1, содержит блок 321 управления, соединенный с камерой 324 и соединенный с внешней системой 327 управления, аналогично ситуации, обсуждаемой выше в связи с вариантом воплощения на фиг.2a.
Камерой 324 управляют для записи изображения контрастного тестового объекта, проиллюстрированного темным пятном 303 и ярким пятном 304, расположенного на расстоянии d от системы 315 постановки на место стоянки. Как поймет специалист, тестовый объект 304, 305 может являться любым заранее заданным объектом или разметкой, расположенными на месте стоянки в пределах поля обзора системы постановки на место стоянки, например частью нанесенной направляющей линии 107. Туман 305 проиллюстрирован на фиг.3 как простирающийся в атмосфере между системой 315 постановки на место стоянки и приближающимся воздушным судном 340.
Далее следует описание, как работает система 315 постановки на место стоянки на фиг.3, чтобы обеспечить индикацию относительно того, возможна ли безопасная постановка на место стоянки, в которой при определении расстояния блока 321 управления используется камера 324 для записи изображений. В записанных изображениях первый пиксель, обозначенный i, и второй пиксель, обозначенный j, содержат данные изображения соответствующей точки Pi и Pj сцены, которые соответствуют пятнам 303, 304 объекта калибровки. Также будет сделана ссылка на блок-схему последовательности операций на фиг.5.
После записи изображения на этапе 501 записи на этапе 503 вычисления вычисляется контрастность между двумя пикселями i и j в изображении камеры, соответствующем двум точкам Pi и Pj сцены на одинаковом расстоянии d от камеры. Затем, как будет описано ниже, контрастность используется как мера ухудшения производительности, вызванного пониженной видимостью.
На контрастность в изображении камеры влияет рассеяние света атмосферными частицами двумя путями, как показано фиг.3. Прямая передача 307 представляет собой ослабленную плотность потока излучения, принимаемого датчиком камеры от точки 303, 304 сцены вдоль линии обзора. Свет 309 воздушного пространства представляет собой общую сумму окружающего освещения 311 (солнечный свет, свечение неба, свет от поверхности земли), отраженного в линию обзора посредством атмосферных частиц.
Известно, что применяются следующие соотношения:


где E(i) и E(j) - яркость в двух пикселях i и j соответственно.
I∞ - интенсивность окружающего освещения,
ρ - нормированная плотность потока излучения точки 303, 304 сцены, являющаяся функцией коэффициента отражения точки сцены, нормированного спектра окружающего освещения и спектральной характеристики камеры 324,
β - коэффициент обратного рассеяния атмосферы перед камерой 324,
d - расстояние между системой 315 и точкой 303, 304 сцены.
Наблюдаемая контрастность между Pi и Pj может быть определена как

Это показывает, что контрастность ухудшается экспоненциально в зависимости от коэффициента β рассеяния и глубины точек сцены в ситуации, когда присутствует туман 305.
Измеряется яркость E двух пикселей и вычисляется контрастность C(i, j) между двумя точками как
Затем на этапе 505 вычисленная контрастность C сравнивается с заранее заданным пороговым значением, чтобы выдать индикацию, т.е. сигнал, возможна ли постановка на место стоянки. Конкретные значения для порога определяются, например, опытным путем. Если контрастность C больше порогового значения, на этапе 507 индикации выдается индикация, что видимость является хорошей и возможна безопасная постановка на место стоянки. Если, с другой стороны, контрастность C меньше порогового значения, на этапе 509 выдается индикация, что видимость является плохой и безопасная постановка на место стоянки невозможна.

Группа изобретений относится к автоматическим системам постановки воздушного судна на место стоянки. Система содержит средство определения расстояния, выполненное с возможностью определять с использованием средства приема сигнала электромагнитного излучения, по меньшей мере, расстояние между системой и воздушным судном. Средство определения расстояния выполнено с возможностью измерять, по меньшей мере, одно свойство сигнала приемника, принимаемого средством приема сигнала, сравнивать упомянутое измерение, по меньшей мере, одного свойства сигнала приема с пороговым значением и в зависимости от сравнения выдавать сигнал, показывающий, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки воздушного судна на место стоянки. Свойство имеет отношение к видимости на месте стоянки. Способ управления постановкой воздушного судна на место стоянки предназначен для применения упомянутой системы. Система и способ предназначены для управления операциями в аэропорту. Группа изобретений обеспечивает определение возможности автоматической постановки воздушного судна на место стоянки. 3 н. и 16 з.п. ф-лы, 6 ил.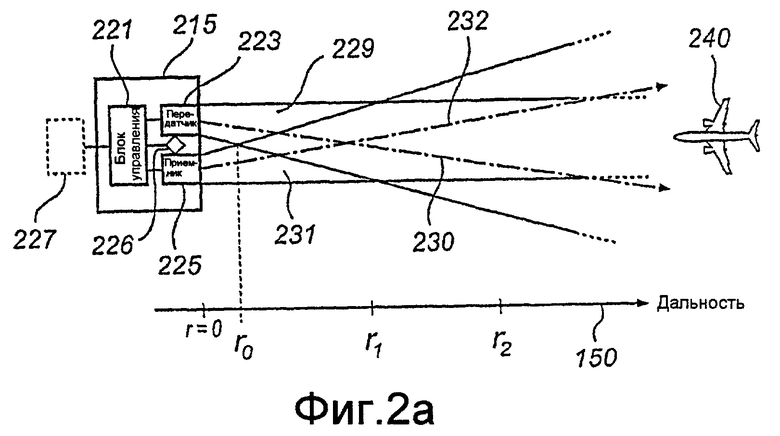
1. Система постановки воздушного судна на место стоянки, выполненная с возможностью размещения на месте стоянки, упомянутая система содержит средство определения расстояния, выполненное с возможностью определять с использованием средства приема сигнала электромагнитного излучения, по меньшей мере, расстояние между системой и воздушным судном, причем упомянутое средство определения расстояния дополнительно выполнено с возможностью: измерять, по меньшей мере, одно свойство сигнала приемника, принимаемого упомянутым средством приема сигнала, упомянутое свойство имеет отношение к видимости на месте стоянки, сравнивать упомянутую меру, по меньшей мере, одного свойства сигнала приемника с пороговым значением, и в зависимости от упомянутого сравнения выдавать сигнал, указывающий, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки на место стоянки с помощью системы.
2. Система по п.1, выполненная с возможностью измерять упомянутое, по меньшей мере, одно свойство сигнала приемника, по меньшей мере, относящееся к рассеиванию упомянутого электромагнитного излучения.
3. Система по п.2, в которой средство определения расстояния содержит лазерное дальномерное средство, причем средство определения расстояния выполнено с возможностью измерять рассеивание лазерного излучения.
4. Система по п.2, в которой средство определения расстояния содержит радиолокационное дальномерное средство, причем средство определения расстояния выполнено с возможностью измерять рассеивание излучения радиолокатора.
5. Система по любому из пп.2-4, в которой средство определения расстояния выполнено с возможностью измерять электромагнитное излучение обратного рассеяния.
6. Система по п.5, в которой средство определения расстояния выполнено с возможностью определять распределение мощности принимаемого сигнала электромагнитного излучения обратного рассеяния.
7. Система по п.1, в которой упомянутое средство определения расстояния содержит средство приема сигнала, содержащее средство формирования изображений, выполненное с возможностью обеспечивать двухмерные изображения места стоянки, причем средство определения расстояния выполнено с возможностью измерять, по меньшей мере, одно свойство сигнала приемника, по меньшей мере, относящееся к различию контрастности, по меньшей мере, между двумя областями в пределах изображения.
8. Система по п.7, в которой упомянутое средство формирования изображений выполнено с возможностью определять упомянутое различие контрастности между заранее заданными местоположениями на месте стоянки, упомянутые заранее заданные местоположения соответствуют упомянутым, по меньшей мере, двум областям в пределах изображения.
9. Система по п.8, в которой упомянутые заранее заданные местоположения расположены по существу на одинаковом расстоянии от системы.
10. Система по любому из пп.7-9, в которой средство формирования изображений выполнено с возможностью обнаруживать электромагнитное излучение, по меньшей мере, в оптическом диапазоне длин волн.
11. Система по любому из пп.7-9, в которой средство формирования изображений выполнено с возможностью обнаруживать электромагнитное излучение, по меньшей мере, в инфракрасном диапазоне длин волн.
12. Способ управления постановкой воздушного судна на место стоянки в системе постановки воздушного судна на место стоянки, расположенной на месте стоянки, упомянутая система содержит средство определения расстояния, выполненное с возможностью определять с использованием средства приема сигнала электромагнитного излучения, по меньшей мере, расстояние между системой и воздушным судном, причем упомянутое средство определения расстояния выполняет этапы, на которых: измеряют, по меньшей мере, одно свойство сигнала приемника, принимаемого упомянутым средством приема сигнала, упомянутое свойство имеет отношение к видимости на месте стоянки, сравнивают упомянутую меру, по меньшей мере, одного свойства сигнала приемника с пороговым значением, и в зависимости от упомянутого сравнения выдают сигнал, указывающий, достаточно ли хороша видимость на месте стоянки для возможности безопасной постановки на место стоянки с помощью системы.
13. Способ по п.12, в котором измерение, по меньшей мере, одного свойства сигнала приемника содержит измерение, по меньшей мере, рассеяния упомянутого электромагнитного излучения.
14. Способ по п.13, в котором измерение включает в себя измерение электромагнитного излучения обратного рассеяния.
15. Способ по п.14, содержащий этап, на котором определяют распределение мощности электромагнитного излучения обратного рассеяния.
16. Способ по п.12, в котором упомянутое средство определения расстояния содержит средство приема сигнала, содержащее средство формирования изображений, выполненное с возможностью обеспечивать двухмерные изображения места стоянки, причем этап измерения, по меньшей мере, одного свойства сигнала приемника включает в себя измерение, по меньшей мере, различия контрастности, по меньшей мере, между двумя областями в пределах изображения.
17. Способ по п.16, в котором упомянутое определение упомянутого различия контрастности между заранее заданными местоположениями на месте стоянки содержит определение различия контрастности между заранее заданными местоположениями, соответствующими упомянутым, по меньшей мере, двум областям в пределах изображения.
18. Способ по п.17, в котором упомянутые заранее заданные местоположения расположены по существу на одинаковом расстоянии от системы.
19. Применение системы постановки воздушного судна на место стоянки по любому из пп.1-11 для управления операциями в аэропорту.
| ПАРОГЕНЕРАТОР | 1987 |
|
SU1482326A1 |
| СИСТЕМА ДЛЯ УСТАНОВКИ САМОЛЕТА НА МЕСТО СТОЯНКИ И ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ НАЗЕМНЫХ СЛУЖБ | 1990 |
|
RU2093899C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕЛИНЕЙНО-РАССЕИВАЮЩЕГО ОБЪЕКТА | 1997 |
|
RU2119175C1 |
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |

