Область техники, к которой относится изобретение
Настоящее изобретение относится к способу наведения пилота заходящего воздушного судна в положение остановки на месте стоянки. Изобретение также относится к системе постановки воздушного судна на место стоянки.
Уровень техники
Возросшие потребности в повышении экономии топлива привели к тому, что авиапроизводители стали производить более крупные воздушные суда для снижения потребления топлива на одно пассажирское место. Поскольку авиакомпании вносят соответствующие изменения в свои парки, заменяя воздушные суда меньших размеров на воздушные суда больших размеров, аэропорты были вынуждены разработать средства эффективного и безопасного наземного обслуживания воздушных судов большего размера. Например, многие международные аэропорты были вынуждены увеличить длину взлетно-посадочной полосы для обеспечения возможности приема воздушных судов «Эйрбас-А380» (англ. Airbus А380).
Размеры воздушных судов также влияют на постановку воздушных судов на место стоянки в аэропорту. В некоторых случаях приходится перестраивать инфраструктуру для ее приспособления к физическим размерам воздушных судов, при этом в других случаях физические размеры инфраструктуры достаточны для вмещения воздушных судов. В последнем случае задача может заключаться в обеспечении безопасной постановки воздушных судов на место стоянки. У воздушных судов больших размеров больше расстояние между колесами и, как следствие, больший радиус разворота. Кроме того, расстояние между концами крыльев также обычно больше.
В целом, безопасную и надежную постановку воздушного судна на место стоянки обеспечивают посредством систем постановки воздушного судна на место стоянки, размещенных локально на местах стоянки в аэропорту, причем каждая система постановки воздушного судна на место стоянки выполнена с возможностью содействия пилоту, а иногда - и бригаде наземного обслуживания, в безопасном и надежном помещении воздушного судна на место стоянки. Системы постановки воздушного судна на место стоянки содержат средства определения положения воздушного судна во время его захода на место стоянки, при этом указанные средства зачастую представляют собой систему обнаружения с удаленным зондированием или радиолокационную систему. Известные системы постановки воздушного судна на место стоянки обычно выполнены с возможностью анализа данных о местоположении от воздушного судна, а также, потенциально, других вводных параметров, и принятия, на основе таких параметров, решения о выдаче или невыдаче разрешения на постановку на место стоянки. В соответствии с принятым решением, на табло на месте стоянки, хорошо видимом пилоту, отображают информацию о том, какое действие должен предпринять пилот.
Из уровня техники известны системы постановки воздушного судна на место стоянки.
Например, в WO 01/35327 А1 раскрыта система предоставления для идентификации воздушного судна и постановки его на место стоянки, в которой для идентификации приближающегося к выходу воздушного судна используют лазерный дальномер (ЛДМ, англ. laser range finder (LRF)). ЛДМ направляют на воздушное судно, по его отраженному сигналу строят профиль и сравнивают его с известными профилями.
В качестве другого примера, в US 2008/157947 А1 раскрыты система и способ наведения воздушного судна в положение остановки, в основе которых лежат метки радиочастотной идентификации (РЧИ, англ. radio frequency identification (RFID)). РЧИ-метки обычно расположены на земле с возможностью их обнаружения датчиками РЧИ, расположенными на воздушном судне.
В качестве еще одного примера, в ЕР 3222529 А1 раскрыта система постановки воздушного судна на место стоянки, включающая в себя оптическую систему проверки и определения местоположения, выполненную с возможностью сканирования пространства, связанного с местом стоянки, причем данная оптическая система проверки и определения местоположения также выполнена с возможностью регулирования протяженности сканируемого пространства в зависимости от полученных данных наблюдения.
Недостаток известных способов и систем состоит в том, что они не приспособлены для обслуживания воздушных судов бльших размеров, важность которых возрастает в настоящее время. Даже если физические размеры воздушных судов соответствуют месту стоянки, системы постановки воздушного судна на место стоянки и реализуемые в них способы не приспособлены для надлежащего обслуживания процесса постановки на место стоянки, что может привести к большому числу перебоев во время постановки на место стоянки или даже к авариям.
Сущность изобретения
Цель заключается в уменьшении, смягчении или преодолении одного или более из вышеуказанных недостатков прототипов по отдельности или в какой-либо комбинации и решении вышеуказанной задачи.
Согласно первому аспекту, предложен способ, реализуемый в системе постановки воздушного судна на место стоянки, для наведения пилота заходящего воздушного судна в положение остановки на месте стоянки, причем система постановки воздушного судна на место стоянки содержит систему отслеживания положения, блок управления и табло, при этом указанный способ включает в себя этапы, на которых:
система отслеживания положения отслеживает положение заходящего воздушного судна в пределах пространства на месте стоянки, причем указанное пространство имеет продольную протяженность вдоль направления захода к ожидаемому положению входа воздушного судна,
блок управления соотносит указанное отслеженное положение с первой зоной, при этом указанная первая зона заключает в себе положение остановки и проходит вдоль направления захода с образованием передней границы, обращенной к заходящему воздушному судну,
блок управления соотносит указанное отслеженное положение с подсекцией первой зоны, при этом указанная подсекция заключает в себе положение остановки и проходит вдоль направления захода, сходясь с частью передней границы первой зоны,
если указанное отслеженное положение находится в пределах указанной подсекции первой зоны:
блок управления передает информацию на табло для визуальной выдачи пилоту заходящего воздушного судна указания продолжить заход на место стоянки,
если указанное отслеженное положение находится в пределах первой зоны, но не в пределах указанной подсекции первой зоны:
блок управления передает информацию на табло для визуальной выдачи пилоту заходящего воздушного судна указания остановить воздушное судно.
Схождение подсекции с передней границей первой зоны подразумевает то, что часть границ подсекции является общей для нее и передней границы первой зоны.
Кроме того, выражение «отслеженное положение находится в пределах зоны» означает то, что установлено, что отслеженное положение находится в пределах этой зоны.
Таким образом, способ можно, в качестве альтернативы, охарактеризовать как способ, реализуемый в системе постановки воздушного судна на место стоянки, для наведения пилота заходящего воздушного судна в положение остановки на месте стоянки, причем система постановки воздушного судна на место стоянки содержит систему отслеживания положения, блок управления и табло, при этом указанный способ включает в себя этапы, на которых:
система отслеживания положения отслеживает положение заходящего воздушного судна в пределах пространства на месте стоянки, причем указанное пространство имеет продольную протяженность вдоль направления захода к ожидаемому положению входа воздушного судна,
блок управления соотносит указанное отслеженное положение с первой зоной, при этом указанная первая зона заключает в себе положение остановки и проходит вдоль направления захода с образованием передней границы, обращенной к заходящему воздушному судну,
блок управления соотносит указанное отслеженное положение с подсекцией первой зоны, при этом указанная подсекция заключает в себе положение остановки и проходит вдоль направления захода, сходясь с частью передней границы первой зоны так, что часть границ подсекции является общей для нее и передней границы первой зоны,
если будет установлено, что указанное отслеженное положение находится в пределах указанной подсекции первой зоны:
блок управления передает информацию на табло для визуальной выдачи пилоту заходящего воздушного судна указания продолжить заход на место стоянки,
если будет установлено, что указанное отслеженное положение находится в пределах первой зоны, но не в пределах указанной подсекции первой зоны:
блок управления передает информацию на табло для визуальной выдачи пилоту заходящего воздушного судна указания остановить воздушное судно.
Линия заруливания может проходить от положения остановки вдоль направления захода для создания дополнительного средства наведения пилота, причем указанная подсекция первой зоны образована с возможностью вмещения части линии заруливания, находящейся в пределах первой зоны.
В основе способа лежит знание того, что воздушное судно, имеющее определенные размеры и относительные расстояния между колесами, имеет заранее определенные характеристики маневренности. Это означает, что если заходящее воздушное судно входит в зону стоянки определенным образом, то система постановки воздушного судна на место стоянки не обязательно должна точно знать, как именно воздушное судно расположено относительно места стоянки. Одного положения воздушного судна, например, положения носовой части воздушного судна, достаточно для того, чтобы система постановки воздушного судна на место стоянки могла спрогнозировать то, будет ли успешной попытка захода воздушного судна на место стоянки. Решение принимают после того, как воздушное судно войдет в первую зону. Далее, в зависимости от того, в какую часть первой зоны и в каком отслеженном положении заходит воздушное судно (т.е. в пределах или за пределами подсекции первой зоны), может быть принято решение разрешить или остановить заход.
Способ может обеспечивать преимущество, состоящее в обеспечении более безопасной постановки на место стоянки, особенно для воздушных судов больших размеров или автоматической защиты в части расстояния между крыльями в любых местах стоянки, рассчитанных на воздушные суда любых размеров, т.е. в двух соседних местах стоянки узкофюзеляжных самолетов. По стандартам Международной организации гражданской авиации (ИКАО, англ. ICAO) и Европейского агентства авиационной безопасности (ЕААБ, англ. EASA), расстояние между законцовками крыльев соседних воздушных судов должно составлять 7.5 метра при отсутствии контроля зон стоянки системами постановки воздушного судна на место стоянки, содействующими в парковании. Таким образом, поскольку раскрываемый способ дополнительно усиливает контроль захода и снижает риск столкновения, он может обеспечить возможность паркования воздушных судов более современных типов и больших размеров в местах стоянки, которые изначально не были рассчитаны и построены для вмещения воздушных судов таких типов. Способ также может обеспечивать преимущество в ситуации, когда воздушное судно, по какой-либо причине, вошло в зону стоянки по неправильной линии заруливания. Пилот может попытаться скорректировать курс воздушного судна для выравнивания, однако в некоторых случаях попытка может оказаться безуспешной из-за того, что размеры воздушного судна слишком велики для успешного изменения положения в располагаемой зоне.
Это является результатом снижения риска чрезмерного приближения воздушного судна к соседним объектам на пути к месту стоянки или даже столкновения с ними. Способ также может обеспечить возможность создания более гибкой методики постановки на место стоянки в аэропорту. Гибкость во многом обусловлена тем, насколько легко можно изменять границы первой зоны и ее подсекции в зависимости от ситуации. Даже если инфраструктура на месте стоянки в аэропорту является в некоторой степени постоянной и может рассматриваться как заранее определенная, некоторые части инфраструктуры не являются таковыми, например, передвижной телескопический трап. Коррекция первой зоны и/или ее подсекции позволяет учитывать структурные изменения в зоне стоянки. Кроме того, в местах стоянки, рассчитанных на множество линий заруливания воздушных судов, заходящих с разных направлений, и/или на различные типы воздушных судов, система может корректировать первую зону и ее подсекцию в зависимости от того, какая из линий заруливания назначена заходящему воздушному судну. Если пилот по ошибке поведет воздушное судно по неправильной линии заруливания, воздушное судно может войти в первую зону за пределами подсекции первой зоны, и в этом случае пилоту будет дана инструкция остановить воздушное судно.
Первая зона образована так, что заключает в себе положение остановки. Первая зона может также заключать в себе часть линии заруливания. Далее первая зона проходит вдоль направления захода. Направление захода может совпадать с направлением линейной части линии заруливания вблизи положения остановки. Первая зона образует переднюю границу, обращенную к заходящему воздушному судну. Первая зона может иметь простую в образовании геометрическую форму, например, прямоугольную. В таком случае, первая зона будет иметь четыре стороны, одна из которых будет передней границей. При этом форма первой зоны может быть любой.
Подсекция первой зоны заключает в себе положение остановки и проходит вдоль направления захода, сходясь с частью передней границы первой зоны. Подсекция может также заключать в себе часть линии заруливания. В некоторых вариантах подсекция целиком заключает в себе часть линии заруливания, заключенную в первую зону. Подсекция может иметь форму прямоугольника и быть образована симметрично относительно линии заруливания. Часть границ подсекции является общей для нее и первой зоны. Это означает, что общая часть является частью передней границы.
Вторая зона образована за пределами первой зоны. Таким образом, вторая зона проходит наружу от передней границы первой зоны. Вторая зона образует собственную переднюю границу. Передняя граница второй зоны также обращена к заходящему воздушному судну. При этом, поскольку вторая зона расположена дальше от системы отслеживания положения, чем первая зона, заходящее воздушное судно сначала пересечет переднюю границу второй зоны для входа во вторую зону, а позднее перейдет переднюю границу первой зоны для входа в первую зону. Часть границ первой зоны и второй зоны является общей для них. В некоторых вариантах общая часть границ второй зоны соответствует передней границе первой зоны. Это означает, что первая зона и вторая зона могут примыкать друг к другу на всем протяжении передней границы первой зоны.
Следует понимать, что размер и положение первой зоны и размер и положение ее подсекции нужно будет определять до постановки на место стоянки, поскольку данная информация является частью основы для принятия решения о том, какая информация будет представлена на табло. Это означает, что блок управления может быть выполнен с возможностью приема идентификационных данных, относящихся к типу заходящего воздушного судна. По идентификационным данным система постановки воздушного судна на место стоянки может определять размеры воздушного судна, например, из базы данных аэропорта, с которой система постановки воздушного судна на место стоянки функционально связана. Также возможно, чтобы система постановки воздушного судна на место стоянки содержала размеры типов воздушных судов в локальной памяти. Система постановки воздушного судна на место стоянки может, например, содержать заранее заданные координаты первой зоны и ее подсекции, хранимые в памяти системы постановки воздушного судна на место стоянки, благодаря чему блок управления может выбирать из указанной памяти соответствующие координаты для конкретного типа воздушного судна. Таким образом, первая зона и ее подсекция могут быть разными для разных воздушных судов, разных мест стоянки, разных направлений захода и т.п. Например, если «Боинг-747» (англ. Boeing 747) заходит на какое-либо место стоянки с левой стороны, размеры и положения первой зоны и ее подсекции будут не такими, как в случае захода «Эйрбас А380» (англ. Airbus А380) на то же самое место стоянки с правой стороны. Протяженность первой зоны и/или протяженность подсекции первой зоны можно определять в зависимости от одного или более из следующего перечня: размеры воздушного судна, ожидаемого к заходу на место стоянки, размеры воздушного судна, заходящего на место стоянки, размеры воздушных судов на соседних местах стоянки, направление, с которого воздушное судно заходит в зону стоянки, и линия заруливания, назначенная заходящему воздушному судну.
В некоторых вариантах определение протяженности подсекции (140а) первой зоны (140) включает в себя определение ее поперечного размера и/или продольного размера, при этом указанные размеры определяют с возможностью создания достаточного зазора для заходящего воздушного судна (10).
Важность может иметь как поперечный размер, так и продольный размер подсекции первой зоны. Указанные размеры обычно определяют индивидуально в зависимости от схемы расположения в зоне стоянки, типов воздушных судов, ожидаемых к прибытию на место стоянки и т.п. В число других факторов, влияющих на определение размеров, могут входить: то, как рулежная дорожка физически связана с местом стоянки, и/или то, как сконфигурирована линия заруливания. Например, линия заруливания может образовывать относительно резкий 90-градусный поворот в переходной зоне между рулежной дорожкой и зоной стоянки. Или же линия заруливания может образовывать менее резкий поворот под менее острым углом. В число других факторов, могущих влиять на определение указанных размеров, входит наличие постоянной инфраструктуры в зоне стоянки, например, мачт освещения, служебных дорог, зон, выделенных под хранение оборудования и т.п. Поэтому размеры может быть нужно определять индивидуально для каждого места стоянки.
Поперечный размер может быть важнее, чем продольный размер, для создания приемлемого зазора до соседних мест стоянки и типов воздушных судов, ожидаемых к прибытию на соседнее место стоянки.
Продольный размер может быть важнее, чем поперечный размер, для регулирования того, насколько далеко заходящее воздушное судно может продвинуться в выполнении процедуры постановки на место стоянки до тех пор, пока установка на место стоянки не будет прекращена.
Поперечный размер и/или продольный размер можно определять на основе моделирования процедур заходов воздушного судна и его постановки на место стоянки в конкретной зоне стоянки для определения оптимизированных значений поперечного и продольного размеров. Возможно применение более одного поперечного и продольного размеров. Например, поперечный размер подсекции первой зоны может быть переменным. В таком случае можно определить более одного значения поперечного размера.
Кроме того, протяженность первой зоны и/или протяженность подсекции первой зоны можно корректировать во время захода воздушного судна. Это позволяет повысить гибкость способа, например, в ситуациях, когда было установлено, что тип заходящего воздушного судна отличен от ожидавшегося, или в случае непреднамеренного появления объектов в зоне стоянки или изменения их положения в ней во время захода воздушного судна. Поэтому также может быть нужно скорректировать протяженность первой зоны и/или протяженность подсекции первой зоны. Коррекцию протяженности (протяженностей) определяют в зависимости от одного или более из следующего: размеры воздушных судов на соседних местах стоянки, положения воздушных судов на соседних местах стоянки и отслеженное положение заходящего воздушного судна (10).
В некоторых вариантах отслеженное положение соответствует положению носовой части заходящего воздушного судна. Это может быть преимуществом в части обеспечения надежного и быстрого пути определения положения. Носовая часть войдет в зону отслеживания первой и может быть обнаружена на ранней стадии. Кроме того, носовую часть можно, из соображений симметрии, соотнести с линией заруливания.
В некоторых вариантах способ дополнительно включает в себя этапы, на которых: если будет установлено, что указанное отслеженное положение находится в пределах указанной подсекции первой зоны: по результату указанного соотнесения определяют боковое отклонение от ожидаемого положения в пределах указанной подсекции, и блок управления передает информацию об указанном относительном отклонении на табло для визуальной выдачи пилоту указания скорректировать курс воздушного судна во время захода на место стоянки. Боковое отклонение может представлять собой боковое расстояние между отслеженным положением и линией заруливания.
Это может обеспечивать преимущество, состоящее в возможности дополнительной оптимизации захода в положение остановки на место стоянки. Таким образом, даже в случае, когда заходящему воздушному судну разрешен заход на место стоянки, так как было определено, что отслеженное положение находится в пределах подсекции первой зоны, воздушное судно не обязательно должно быть оптимально выровнено вдоль линии заруливания. Возможность продолжения наведения системой пилота в положение остановки позволяет улучшить парковку. Это также снижает риск перемещения воздушного судна, при котором происходит перемещение отслеженного положения воздушного судна из подсекции первой зоны в подсекцию за пределами первой зоны, где система постановки воздушного судна на место стоянки выдаст пилоту указание об остановке.
В некоторых вариантах способ дополнительно включает в себя этапы, на которых: блок управления соотносит указанное отслеженное положение со второй зоной, при этом указанная вторая зона проходит наружу от передней границы первой зоны с образованием передней границы второй зоны; если будет установлено, что указанное отслеженное положение находится в пределах второй зоны: по результатам соотнесения определяют боковое отклонение от ожидаемого положения в пределах указанной второй зоны, и блок управления передает информацию об указанном относительном отклонении на табло для визуальной выдачи пилоту указания скорректировать курс воздушного судна во время захода на место стоянки.
За счет введения второй зоны за пределами первой зоны и обеспечения возможности активного наведения (во второй зоне) пилота системой постановки на место стоянки в конкретное положение входа в первую зону, способ дополнительно улучшает заход воздушного судна. Это позволяет лучше подготовить воздушное судно к входу в первую зону. До тех пор, пока отслеженное положение находится в пределах второй зоны, попыток остановить воздушное судно не будет. Напротив, пилот получает возможность скорректировать путь захода так, чтобы отслеженное положение заходящего воздушного судна попало в подсекцию первой зоны.
Также возможно применение двух или более значений отслеженного положения в качестве основания для принятия решения. Например, блок управления может быть выполнен с возможностью непрерывного отслеживания положения заходящего воздушного судна с возможностью создания линии положений. Блок управления может быть выполнен с возможностью анализа линии положений разными способами. Например, блок управления может быть выполнен с возможностью вычисления временной производной бокового расстояния относительно линии заруливания. Блок управления может быть выполнен с возможностью передачи информации на табло для визуальной выдачи пилоту заходящего воздушного судна указания снизить скорость или остановить заходящее воздушное судно в случае превышения порогового значения указанной производной бокового расстояния, указывающего на слишком резкое изменение направления воздушного судна. Это можно выполнить, когда отслеженное положение находится в пределах подсекции первой зоны.
Также можно использовать линию положений, полученную в результате непрерывного отслеживания положения заходящего воздушного судна, для вычисления скорости поступательного движения воздушного судна. Данную скорость можно использовать различными путями. Например, первую зона и/или ее подсекцию можно корректировать в зависимости от указанной вычисленной скорости. Это может обеспечивать преимущество, состоящее в уменьшении размера подсекции первой зоны в зависимости от возрастания скорости для снижения риска столкновений.
В некоторых вариантах система отслеживания положения представляет собой лазерную систему отслеживания положения с возможностью непрерывного сканирования пространства на месте стоянки, при этом указанное пространство включает в себя по меньшей мере первую зону. В качестве альтернативы или дополнительно, система отслеживания положения может содержать радиолокационные датчики, датчики технического видения, ультразвуковые датчики или нечто подобное.
Согласно второму аспекту, предложен машиночитаемый носитель, содержащий инструкции машинного кода с возможностью выполнения способа по первому аспекту при исполнении их устройством, имеющим функцию обработки.
Согласно третьему аспекту, предложена система постановки воздушного судна на место стоянки для наведения пилота заходящего воздушного судна в положение остановки на месте стоянки, содержащая:
систему отслеживания положения, выполненную с возможностью отслеживания положения заходящего воздушного судна в пределах пространства на месте стоянки, причем указанное пространство имеет продольную протяженность вдоль направления захода к ожидаемому положению входа воздушного судна,
табло для выдачи инструкций пилоту заходящего воздушного судна, и
блок управления, функционально соединенный с системой отслеживания положения и с табло,
причем система постановки воздушного судна на место стоянки выполнена с возможностью выполнения способа по первому аспекту.
Эффекты и признаки второго и третьего аспектов в значительной степени аналогичны раскрытым выше для первого аспекта. Варианты осуществления, речь о которых шла применительно к первому аспекту, в значительной степени совместимы со вторым и третьим аспектами. Также следует отметить, что идеи изобретения относятся ко всем возможным комбинациям признаков, если явным образом не указано иное.
Из нижеследующего раздела «Осуществление изобретения» станет понятно, что сферу применения настоящего изобретения можно расширить. При этом следует понимать, что в разделе «Осуществление изобретения» и частных примерах раскрыты предпочтительные варианты осуществления изобретения, приведенные исключительно для наглядности, так как специалистам в данной области техники, ознакомившимся с разделом «Осуществление изобретения», придут на ум разнообразные изменения и модификации без отступления от объема изобретения.
Поэтому следует понимать, что настоящее изобретение не ограничено конкретными составляющими частями раскрытого устройства или этапами раскрытых способов, поскольку устройство и способ могут быть модифицированы. Также следует понимать, что терминология, используемая в настоящем документе, служит исключительно для раскрытия частных вариантов осуществления и не носит ограничивающего характера. Следует понимать, что указание элемента в единственном числе, а также с использованием слова «указанный» в тексте описания и прилагаемой формулы изобретения означают наличие одного или более элементов, если иное явно не следует из контекста. Таким образом, например, «единица», «блок» (англ. «а unit» или «the unit») может включать в себя несколько устройств и т.п. Слова «содержащий», «включающий в себя», «заключающий в себе» (англ. «comprising», «including», «containing») и аналогичные выражения не исключают наличия других элементов или этапов.
Терминология
Термин «линия заруливания» следует понимать как путь наведения пилота для совершения конкретного захода. Линии заруливания обычно обозначены наземной линией, выполненной краской. При этом место стоянки может иметь более одной линии заруливания. Например, место стоянки может иметь разные линии заруливания для самолетов, прибывающих с разных направлений, для уменьшения угла разворота, который самолет должен совершить у зоны стоянки или вблизи нее.
Фразы, устанавливающие различия в пункте 1, т.е. то, что отслеженное положение находится либо в пределах, либо за пределами той или иной зоны, следует толковать в широком смысле. Отслеженное положение может находиться в любом месте в пределах пространства отслеживания на месте стоянки. Таким образом, отслеженное положение может иметь вертикальную составляющую (например, высоту носовой части воздушного судна). Следует понимать, что отслеженное положение находится в пределах той или иной зоны, если ортогональная проекция отслеженного положения находится в пределах этой зоны (т.е. если отслеженное положение расположено поверх зоны), и за пределами этой зоны, если ортогональная проекция отслеженного положения не находится в пределах этой зоны.
Термин «положение остановки» следует понимать как конкретное положение или координату на месте стоянки, на которую пилота наводят во время захода. То есть положение остановки не является тем же, что и положение воздушного судна как такового. Обычно положение остановки находится вблизи переднего колеса воздушного судна. Положение остановки может быть обозначено в зоне стоянки. Однако так бывает не всегда. Например, положения остановки могут быть разными для разных типов воздушных судов. Поэтому система постановки воздушного судна на место стоянки может определить положение остановки, когда получит информацию о типе воздушного судна.
Краткое описание чертежей
Далее изобретение будет подробнее раскрыто на примерах прилагаемых [схематических] чертежей, изображающих предпочтительные на данный момент варианты осуществления изобретения.
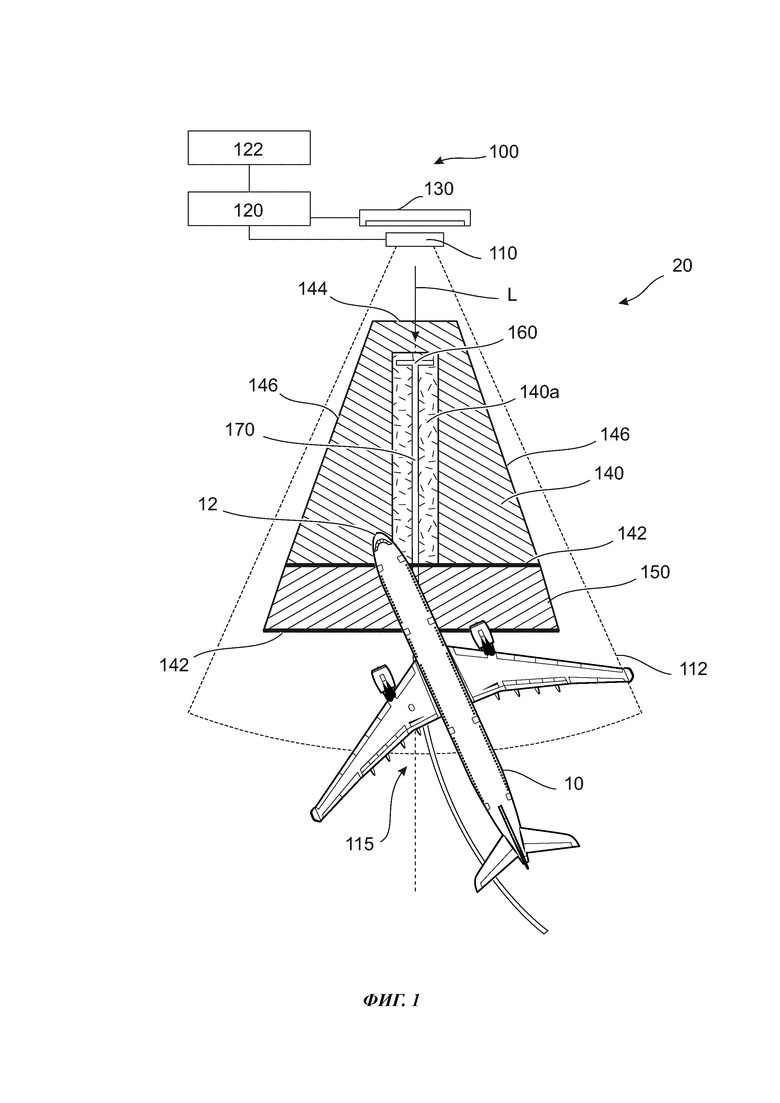
Фиг. 1 схематически изображает вид сверху системы постановки воздушного судна на место стоянки во время захода воздушного судна в вариантах осуществления настоящего раскрытия.
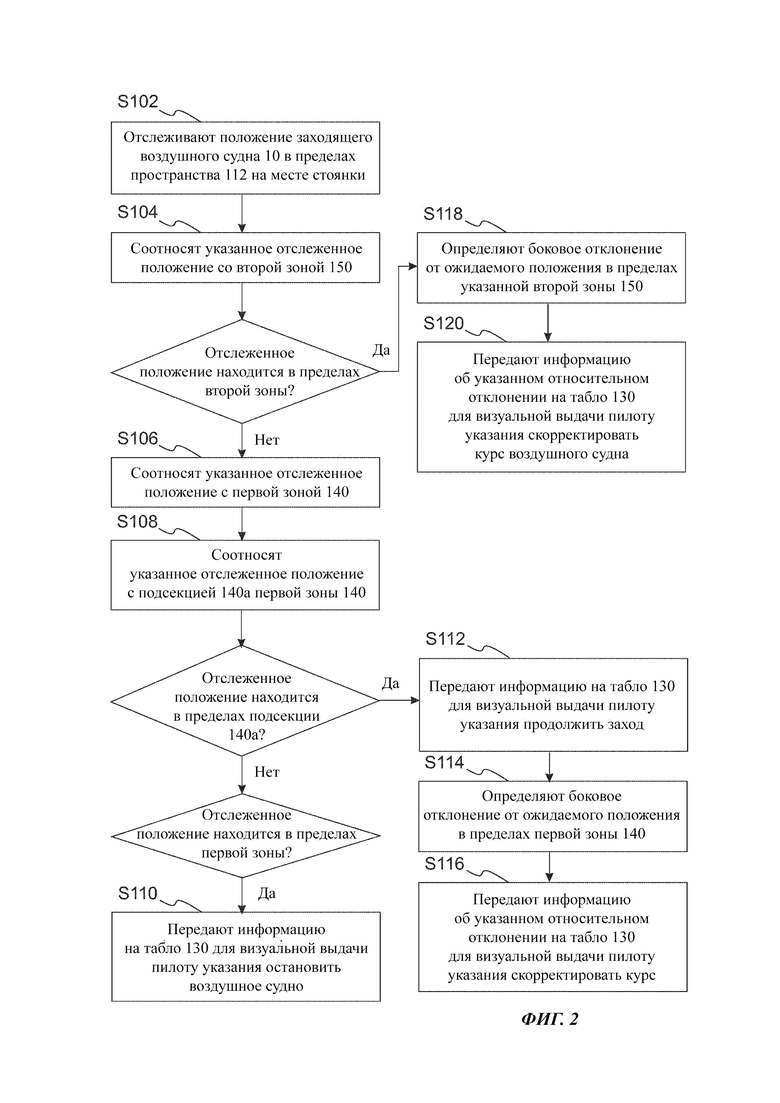
Фиг. 2 изображает технологическую схему способа наведения пилота заходящего воздушного судна в положение остановки на месте стоянки в вариантах осуществления настоящего раскрытия.
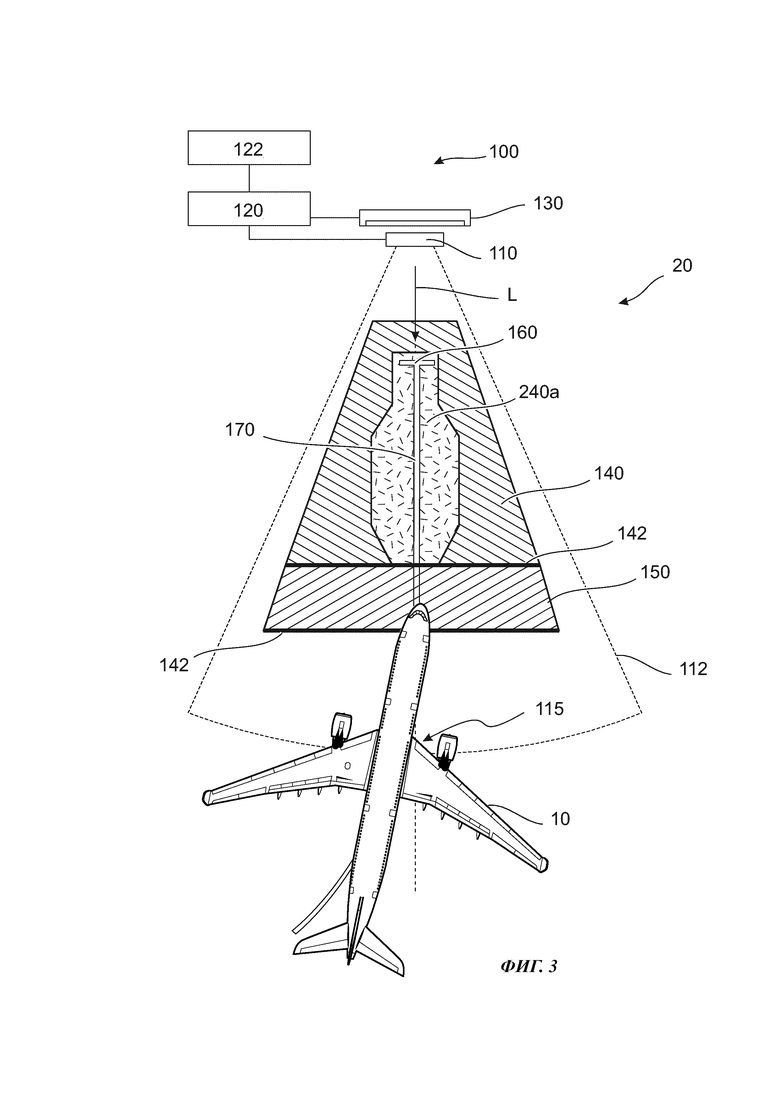
Фиг. 3 схематически изображает вид сверху системы постановки воздушного судна на место стоянки во время захода воздушного судна по другим вариантам осуществления настоящего раскрытия.
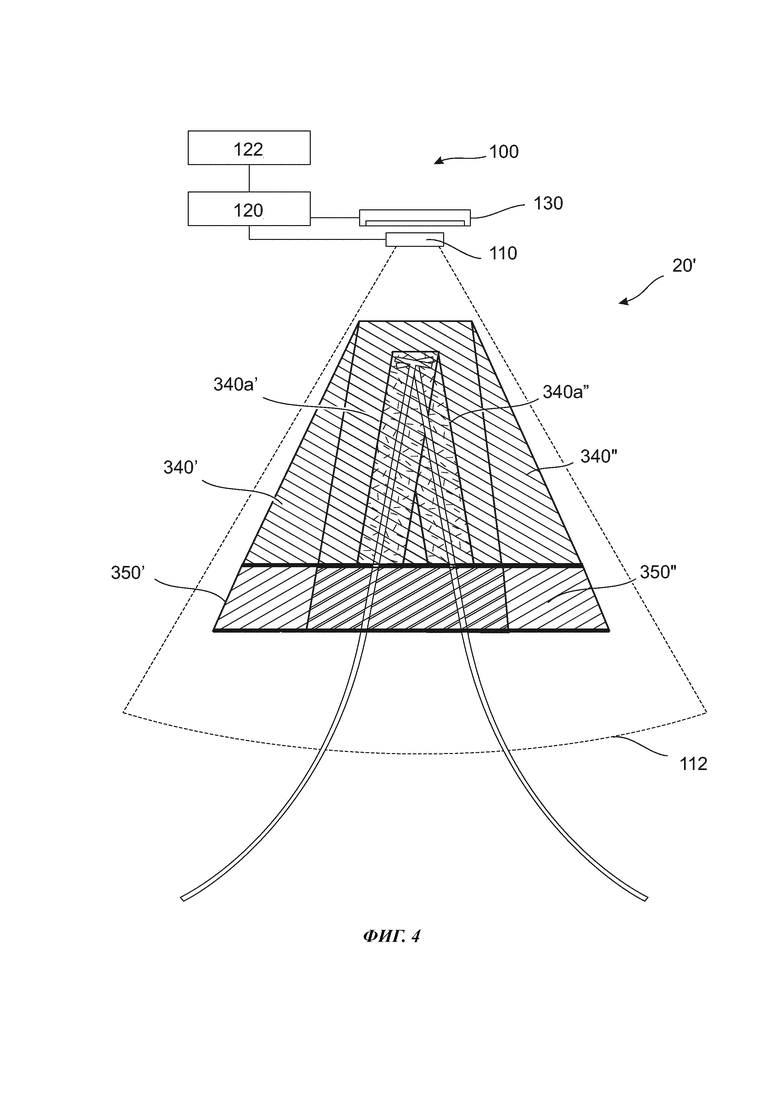
Фиг. 4 схематически изображает вид сверху системы постановки воздушного судна на место стоянки во время захода воздушного судна по дополнительным вариантам осуществления настоящего раскрытия.
Осуществление изобретения
Настоящее изобретение будет полнее раскрыто ниже на примерах прилагаемых чертежей, изображающих предпочтительные на данный момент варианты осуществления изобретения. При этом изобретение можно осуществить во многих других формах, и его не следует рассматривать как ограниченное раскрытыми в настоящем документе вариантами; эти варианты раскрыты для придания описанию содержательности и завершенности и полностью отражают объем изобретения для специалиста в данной области техники.
Фиг. 1 изображает систему 100 постановки воздушного судна на место стоянки по одному из примеров осуществления. Система 100 постановки воздушного судна на место стоянки содержит систему 110 отслеживания положения, выполненную с возможностью отслеживания положения заходящего воздушного судна 10 в пределах пространства 112 на месте 20 стоянки. Система 110 отслеживания положения представляет собой лазерную систему отслеживания положения с возможностью непрерывного сканирования пространства 112 на месте 20 стоянки. Система 110 отслеживания положения испускает лазерный пучок, например, посредством комбинации колеблющихся зеркал или акустооптического модулятора, при этом пучок многократно перемещают по всему пространству 112. Обратные отражения пучка отслеживают посредством оптического детектора системы отслеживания положения с возможностью выведения положения из результата анализа сигнала обратного рассеяния. Лазерная система 110 отслеживания положения выполнена с возможностью сканирования носовой части 12 воздушного судна 10. То есть отслеженное положение 112 заходящего воздушного судна 10 в данном примере соответствует положению носовой части 12 заходящего воздушного судна 10.
Из Фиг. 1 можно понять, что в данном случае система 110 отслеживания положения расположена симметрично по протяженности линии заруливания позади положения 160 остановки. Система 110 отслеживания положения может быть размещена непосредственно на стене здания терминала аэропорта, к которому относится место стоянки. Отслеживаемое пространство 112, в данном случае сканируемое лазерным пучком, проходит наружу от системы 110 отслеживания положения в направлении заходящего воздушного судна. Иначе говоря, отслеживаемое пространство 112 имеет продольную протяженность вдоль направления L захода к ожидаемому положению 115 входа воздушного судна 10. Диапазон обычно составляет 60-110 м в зависимости от места стоянки.
Система 100 постановки воздушного судна на место стоянки также содержит табло 130 для выдачи инструкций пилоту заходящего воздушного судна 10. В данном случае табло также размещено на стене здания терминала в вертикальном положении, причем табло 130 хорошо видимо пилоту заходящего воздушного судна 10.
Система 100 постановки воздушного судна на место стоянки также содержит блок 120 управления, функционально соединенный с системой 110 отслеживания положения и с табло 130. Блок 120 управления также функционально связан с базой 122 данных. База 122 данных может представлять собой оперативную базу данных аэропорта (ОБДА, англ. airport operational database (AODB)), содержащую планы полетов прилетающих и вылетающих воздушных судов. Таким образом, блок 120 управления может иметь доступ к информации, относящейся к типу воздушного судна, которое будет заходить на место 20 стоянки. Блок 120 управления также выполнен с возможностью непосредственной связи с заходящим воздушным судном 10, например, через систему автоматического зависимого наблюдения в режиме радиовещания (англ. Automatic Dependent Surveillance - Broadcast (ADS-B)). В таком случае блок управления может принимать данные о типе воздушного судна непосредственно от воздушного судна 10, а не из базы 122 данных.
В зоне стоянки линия 170 заруливания проходит от положения 160 остановки, расположенного на некотором расстоянии от системы 110 отслеживания положения вдоль направления L захода. Линия 170 заруливания предназначена для наведения пилота во время маневрирования воздушного судна 10 для его приведения в положение стоянки на месте 20 стоянки. Линия заруливания 160 обычно обозначена желтой краской согласно Руководству ИКАО по проектированию аэродромов для обеспечения ее четкой видимости для пилота во время захода.
Ниже будет раскрыт способ, реализуемый в системе 100 постановки воздушного судна на место стоянки. В основе способа лежит соотнесение отслеженного положения воздушного судна 10 и координат зоны стоянки, образующих разные зоны, включающие в себя части зоны стоянки. Чтобы упростить описание способа для понимания, сначала будут определены эти зоны на примере Фиг. 1.
Первая зона 140 образована с возможностью заключения в себе положения 160 остановки. Поэтому первая зона также заключает в себе часть линии 170 заруливания. Фиг. 1 изображает один пример осуществления первой зоны 140. Можно видеть, что первая зона 140 имеет крайнюю изнутри границу 144, обращенную к системе 110 отслеживания положения. Первая зона 140 далее проходит вдоль направления L захода (т.е. в направлении к линии 170 заруливания) с образованием передней границы 142, обращенной к заходящему воздушному судну 10. Первая зона 140 также имеет две боковые границы 146, соединяющие крайнюю изнутри границу 144 и переднюю границу 142 друг с другом.
Первая зона 140 содержит подсекцию 140а, заключающую в себе положение 160 остановки и проходящую вдоль направления L захода, сходясь с частью передней границы 142 первой зоны 140. Подсекция 140а также заключает в себе часть линии 170 заруливания. В данном примере подсекция 140а целиком заключает в себе часть линии 170 заруливания, заключенную в первую зону 140. В данном примере подсекция имеет форму прямоугольника и образована симметрично относительно линии 170 заруливания. Часть границ подсекции 140а является общей для нее и первой зоны 140. Общая часть представляет собой часть передней границы 142.
Вторая зона 150 образована за пределами первой зоны 140. Таким образом, вторая зона 150 проходит наружу от передней границы 142 первой зоны 140. Вторая зона 150 образует собственную переднюю границу 152. Передняя граница 152 второй зоны 150 также обращена к заходящему воздушному судну 10. При этом, поскольку вторая зона 150 расположена дальше от системы 110 отслеживания положения, чем первая зона 140, заходящее воздушное судно 10 сначала пересечет переднюю границу 152 второй зоны 150 для входа во вторую зону, а позднее перейдет переднюю границу 142 первой зоны 140 для входа в первую зону 140. Часть границ первой зоны 140 и второй зоны 150 является общей для них. В данном примере общая часть границ второй зоны 152 соответствует передней границе 142 первой зоны 140. Это означает, что первая зона 150 и вторая зона 150 примыкают друг к другу на всем протяжении передней границы первой зоны.
Фиг. 2 изображает способ, реализуемый в системе постановки воздушного судна на место стоянки, для наведения пилота заходящего воздушного судна 10 в положение 160 остановки на месте 20 стоянки. Способ будет раскрыт на примере раскрытой ниже системы 100 постановки воздушного судна на место стоянки. При этом следует понимать, что способ равным образом применим к другим системам постановки воздушного судна на место стоянки в пределах объема прилагаемой формулы изобретения.
Система 110 отслеживания положения на этапе S102 непрерывно отслеживает положение заходящего воздушного судна 10 в пределах пространства 112 на месте 20 стоянки. Непрерывное отслеживание может быть запущено непосредственно перед появлением воздушного судна 10 в пределах отслеживаемого пространства 112. Например, отслеживание может быть запущено в результате приема блоком 120 управления от воздушного судна 10, и/или диспетчерской вышки, и/или системы наблюдения аэропорта информации о скором заходе воздушного судна 10 на место 20 стоянки.
Блок 120 управления на этапе S104 соотносит указанное отслеженное положение со второй зоной 150 (определение и описание которой даны выше). Если указанное отслеженное положение находится в пределах второй зоны 150, блок 120 управления на этапе S118 определяет боковое отклонение от ожидаемого положения в пределах указанной второй зоны 150. Ожидаемое положение может быть ограничено заранее определенным предпочтительным транспортным путем через вторую зону 150. Предпочтительные транспортные пути для каждого типа воздушного судна и/или разных линий заруливания на место 20 стоянки могут быть уникальными. Предпочтительный транспортный путь может быть расположен по одной оси с линией заруливания.
Далее, на этапе S120, блок 120 управления передает информацию об указанном относительном отклонении на табло 130 для визуальной выдачи пилоту указания скорректировать курс воздушного судна 10 во время захода на место 20 стоянки. Указание может включать в себя показ знаков направлений, например, стрелок, на табло 130.
На данном этапе воздушное судно 10 вошло во вторую зону 150, т.е. внешнюю зону, наиболее удаленную от положения 160 остановки, и прошло через нее. Далее воздушное судно 10 перейдет переднюю границу 142 первой зоны 140 и войдет в пределы первой зоны 140. Далее, в определенной момент произойдет перемещение отслеженного положения из пределов второй зоны 150 в пределы первой зоны 140. Данное перемещение будет зафиксировано блоком 120 управления, так как на этапе S106 он непрерывно соотносит указанное отслеженное положение с первой зоной 140. На этапе S108 блок 120 управления также соотносит отслеженное положение с подсекцией 140а первой зоны 140. Если будет установлено, что отслеженное положение находится в пределах подсекции 140а первой зоны 140, на этапе S112 блок 120 управления передает информацию на табло 130 для визуальной выдачи пилоту заходящего воздушного судна 10 указания продолжить заход на место 20 стоянки. Далее, на этапе S114 блок 120 управления определяет по результату указанного соотнесения боковое отклонение от ожидаемого положения в пределах подсекции 140а и на этапе S116 передает информацию об относительном отклонении на табло 130 для визуальной выдачи пилоту указания скорректировать курс воздушного судна 10 во время захода на место 20 стоянки. Таким образом, если воздушное судно 10 входит в подсекцию 140а первой зоны 140, процесс выдачи указаний курса пилоту, уже запущенный во второй зоне 150, будет также продолжен в подсекции 140а первой зоны 140.
При этом, если будет установлено, что отслеженное положение находится в пределах первой зоны 140, но не в пределах подсекции 140а первой зоны 140, на этапе S110 блок 120 управления передает информацию на табло 130 для визуальной выдачи пилоту заходящего воздушного судна 10 указания остановить воздушное судно 10. То есть, если будет установлено, что отслеженное положение находится за пределами подсекции 140а первой зоны 140, но в пределах первой зоны 140 как таковой, будут считать, что воздушное судно слишком далеко отклонилось от курса для безопасной постановки на место стоянки. Поэтому процедуру автоматической постановки на место стоянки останавливают. В некоторых случаях возможно восстановление автоматической постановки на место стоянки. Например, воздушное судно 10 можно отбуксировать в более перспективное начальное положение для захода, где воздушному судну 10 вновь дают возможность захода на место 20 стоянки при наведении системой 100 постановки воздушного судна на место стоянки. В других случаях автоматическая установка на место стоянки будет прекращена, а вместо нее будет выполнена установка на место стоянки в ручном режиме. Решение будет зависеть от ситуации.
Протяженность первой зоны 140 и/или протяженность подсекции 140а первой зоны 140 можно определять в зависимости от ряда различных факторов, например, размеров воздушного судна, ожидаемого к заходу на место стоянки, размеров воздушного судна 10, заходящего на место стоянки, размеров воздушных судов на соседних местах стоянки, направления захода, с которого воздушное судно 10 заходит в зону стоянки, линии заруливания, назначенной заходящему воздушному судну 10. Как сказано выше, система 100 постановки воздушного судна на место стоянки выполнена с возможностью получения такой информации заранее от другого объекта в аэропорту, например, диспетчерской вышки, системы наблюдения аэропорта, из оперативной базы данных аэропорта (ОБДА), от самого заходящего воздушного судна 10, других воздушных судов и т.п. Протяженность той или иной зоны может быть разной для разных типов воздушных судов, разных направлений захода, разных погодных условий и т.д. Поэтому система обладает большими преимуществами в части возможности корректировки в зависимости от текущей ситуации. Протяженность первой зоны 140 и/или протяженность подсекции 140а первой зоны 140 также можно корректировать во время захода воздушного судна 10. Это означает, что характеристики границ зон можно корректировать в процессе постановки на место стоянки. Это может быть нужно, например, в случае перемещения другого объекта в пределах зоны стоянки. Таким объектом может, например, быть соседнее воздушное судно.
Протяженности первой и второй зон могут быть отличны от раскрытых выше. Фиг. 3 изображает пример, идентичный примеру на Фиг. 1, за исключением протяженности подсекции 240а первой зоны 140. На Фиг. 3 можно видеть, что подсекция 240а первой зоны 140 имеет переменную поперечную протяженность. Данный пример осуществления показывает то, как может быть введен переменный допуск на отклонение от заданного направления через первую зону 140. Следует понимать, что указанную форму можно разнообразно изменять.
Фиг. 4 изображает пример осуществления, в котором место 20' стоянки имеет две линии заруливания и, как следствие, по меньшей мере два набора первых зон 340', 340'' и подсекций 340а', 340а'' и вторых зон 350', 350''. В данном примере сканируемое пространство 112 является одним и тем же для указанных двух разных наборов зон. Сканируемое пространство также может быть смещено вбок для улучшения приема заходящего воздушного судна.
Специалисту в данной области техники будет понятно, что настоящее изобретение никоим образом не ограничено раскрытыми выше предпочтительными вариантами осуществления. Напротив, возможны многочисленные модификации и изменения без отступления от объема прилагаемой формулы изобретения.
Например, возможно наличие дополнительных зон, могущих обуславливать действия блока управления. В настоящем раскрытии главное действие, совершаемое блоком управления, состоит в обеспечении возможности показа на табло сообщения пилоту остановить воздушное судно. При этом некоторые части первой зоны за пределами подсекции менее благоприятны, чем другие. Поэтому может быть образована дополнительная подсекция первой зоны, включающая в себя латерально удаленные части первой зоны. Если будет установлено, что отслеженное положение находится в пределах указанной дополнительной части, могут быть предприняты дополнительные действия для визуальной выдачи указания совершить остановку, например, выдача звукового сигнала тревоги, выдача сигналов наземной команде, выдача сигналов аварийно-спасательным подразделениям и т.п.
Группа изобретений относится к способу и системе информационной поддержки заходящего на посадку судна при его движении к месту стоянки, машиночитаемому носителю. Система содержит систему отслеживания положения, выполненную с возможностью отслеживания положения заходящего на посадку воздушного судна в пределах пространства, имеющего продольную протяженность вдоль направления захода на посадку к ожидаемому положению входа воздушного судна, табло (130) для выдачи инструкций, блок управления. Для наведения пилота заходящего на посадку воздушного судна к месту стоянки в положение остановки отслеживают положение заходящего на посадку воздушного судна в пределах пространства на месте стоянки, соотносят это положение с зоной, заключающей в себе положение остановки, соотносят это положение с подсекцией этой зоны, являющейся ее частью и содержащей часть ее передней границы, передают информацию на табло для указания продолжения движения при нахождении в пределах этой подсекции или передают указания остановки при нахождении вне границ подсекции. Обеспечивается снижение аварийности и уменьшение перебоев во время постановки воздушных судов на место стоянки. 3 н. и 10 з.п. ф-лы, 4 ил.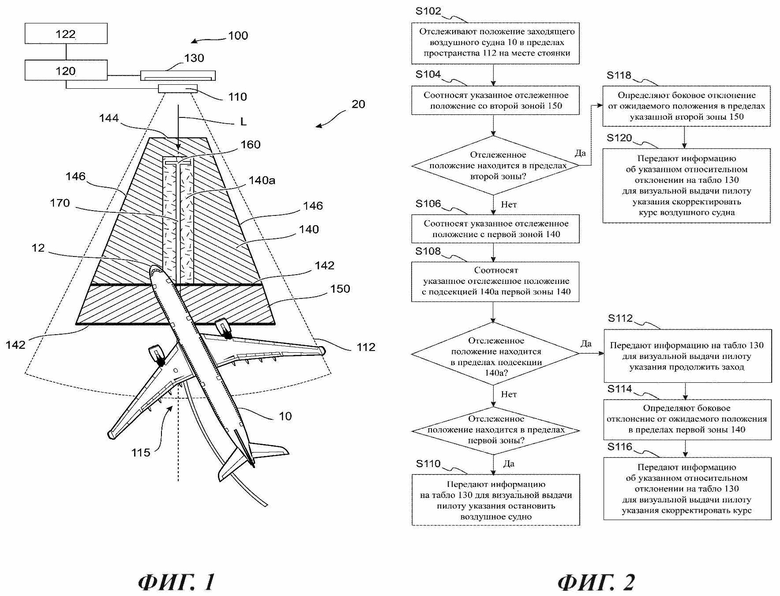
1. Способ информационной поддержки пилота заходящего на посадку воздушного судна при движении воздушного судна к месту стоянки, реализуемый в системе (100) информационной поддержки пилота, причем система (100) содержит систему (110) отслеживания положения, блок (120) управления и табло (130), при этом указанный способ включает в себя этапы, на которых:
система (110) отслеживания положения на этапе (S102) отслеживает положение заходящего на посадку воздушного судна (10) в пределах пространства (112) на месте (20) стоянки, причем указанное пространство имеет продольную протяженность вдоль направления (L) захода на посадку к ожидаемому положению (115) входа воздушного судна (10),
блок (120) управления на этапе (S106) соотносит указанное отслеженное положение с первой зоной (140), при этом указанная первая зона (140) заключает в себе положение (160) остановки и проходит вдоль направления (L) захода на посадку с образованием передней границы (142), обращенной к заходящему на посадку воздушному судну (10),
блок (120) управления на этапе (S108) соотносит указанное отслеженное положение с подсекцией (140а) первой зоны (140), при этом указанная подсекция (140а) заключает в себе положение (160) остановки и проходит вдоль направления (L) захода на посадку, сходясь с частью передней границы (142) первой зоны (140), причем часть границ подсекции (140а) является общей для нее и первой зоны (140), при этом указанная общая часть является частью передней границы (142) первой зоны (140),
если будет установлено, что указанное отслеженное положение находится в пределах указанной подсекции (140а) первой зоны (140):
блок (120) управления на этапе (S110) передает информацию на табло (130) для визуальной выдачи пилоту заходящего на посадку воздушного судна (10) указания продолжить заход на место (20) стоянки,
если будет установлено, что указанное отслеженное положение находится в пределах первой зоны (140), но не в пределах указанной подсекции (140а) первой зоны (140):
блок (120) управления на этапе (S112) передает информацию на табло (130) для визуальной выдачи пилоту заходящего на посадку воздушного судна (10) указания остановить воздушное судно (10).
2. Способ по п. 1, в котором дополнительно, если будет установлено, что указанное отслеженное положение находится в пределах указанной подсекции (140а) первой зоны (140):
на этапе (S114) по результату указанного соотнесения определяют боковое отклонение от ожидаемого положения в пределах указанной подсекции (140а), и
на этапе (S116) блок (120) управления передает информацию об указанном относительном отклонении на табло (130) для визуальной выдачи пилоту указания скорректировать курс воздушного судна (10) во время захода на место (20) стоянки.
3. Способ по п. 1 или 2, отличающийся тем, что линия (170) заруливания проходит от положения (160) остановки вдоль направления (L) захода на посадку для создания дополнительного средства наведения пилота, причем указанная подсекция (140а) первой зоны (140) образована с возможностью вмещения части линии (170) заруливания в пределах первой зоны (140).
4. Способ по п. 3, отличающийся тем, что боковое отклонение представляет собой боковое расстояние между отслеженным положением и линией (170) заруливания.
5. Способ по любому из пп. 1-4, в котором дополнительно:
на этапе (S104) блок (120) управления соотносит указанное отслеженное положение с второй зоной (150), при этом указанная вторая зона (150) проходит наружу от передней границы (142) первой зоны (140) с образованием передней границы (152) второй зоны (150),
если будет установлено, что указанное отслеженное положение находится в пределах второй зоны (150): на этапе (S118) по результату указанного соотнесения определяют боковое отклонение от ожидаемого положения в пределах указанной второй зоны (150), и
на этапе (S120) блок (120) управления передает информацию об указанном относительном отклонении на табло (130) для визуальной выдачи пилоту указания скорректировать курс воздушного судна (10) во время захода на место (20) стоянки.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что система (110) отслеживания положения представляет собой лазерную систему отслеживания положения с возможностью непрерывного сканирования пространства (112) на месте (20) стоянки, при этом указанное пространство (112) включает в себя по меньшей мере первую зону (140).
7. Способ по любому из предыдущих пунктов, отличающийся тем, что указанное отслеженное положение соответствует положению носовой части (12) заходящего на посадку воздушного судна (10).
8. Способ по любому из предыдущих пунктов, отличающийся тем, что протяженность первой зоны (140) и/или протяженность подсекции (140а) первой зоны (140) определяют в зависимости от одного или более из следующего перечня: размеры воздушного судна, ожидаемого к заходу на место стоянки, размеры воздушного судна (10), заходящего на место стоянки, размеры воздушных судов на соседних местах стоянки, направление захода, с которого воздушное судно заходит в зону стоянки, и линия заруливания, назначенная заходящему на посадку воздушному судну (10).
9. Способ по п. 8, отличающийся тем, что определение протяженности подсекции (140а) первой зоны (140) включает в себя определение ее поперечного размера и/или продольного размера, при этом указанные размеры определяют с возможностью создания достаточного зазора для заходящего на посадку воздушного судна (10).
10. Способ по любому из предыдущих пунктов, отличающийся тем, что протяженность первой зоны (140) и/или протяженность подсекции (140а) первой зоны (140) можно корректировать во время захода на посадку воздушного судна (10).
11. Способ по п. 10, отличающийся тем, что указанную коррекцию протяженности (протяженностей) определяют в зависимости от одного или более из следующего: размеры воздушных судов на соседних местах стоянки, положения воздушных судов на соседних местах стоянки и отслеженное положение заходящего на посадку воздушного судна (10).
12. Машиночитаемый носитель, содержащий инструкции машинного кода с возможностью выполнения способа по любому из пп. 1-11 при исполнении их устройством, имеющим функцию обработки.
13. Система (100) информационной поддержки пилота заходящего на посадку воздушного судна (10) при движении воздушного судна к месту (20) стоянки, содержащая:
систему (110) отслеживания положения, выполненную с возможностью отслеживания положения заходящего на посадку воздушного судна (10) в пределах пространства (112) на месте (20) стоянки, причем указанное пространство (112) имеет продольную протяженность вдоль направления (L) захода к ожидаемому положению (115) входа воздушного судна (10),
табло (130) для выдачи инструкций пилоту заходящего на посадку воздушного судна (10), и
блок (120) управления, функционально соединенный с системой (110) отслеживания положения и с табло (130),
отличающаяся тем, что система (100) выполнена с возможностью выполнения способа по любому из пп. 1-11.
| СИСТЕМЫ ОПОЗНАВАНИЯ И НАВЕДЕНИЯ ПРИ ПАРКОВКЕ ВОЗДУШНЫХ СУДОВ | 2000 |
|
RU2268498C2 |
| US 7702453 B2, 20.04.2010 | |||
| ИДЕНТИФИКАЦИЯ ОСЕВОЙ ЛИНИИ В СИСТЕМЕ УПРАВЛЕНИЯ УСТАНОВКОЙ НА МЕСТО СТОЯНКИ, ОБОРУДОВАННОЕ ТЕЛЕСКОПИЧЕСКИМ ТРАПОМ | 2002 |
|
RU2278419C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |

