Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к системам управления в аэропортах и к способам, реализуемым в таких системах управления. В частности, настоящее изобретение относится к системе управления в аэропорту, выполненной с возможностью приема информации, касающейся положения воздушного судна на земле, и настройки запуска процесса подготовки назначенного места стоянки для воздушного судна относительно указанного положения воздушного судна.
Уровень техники
Перед каждым рейсом, разрабатывается план полета, который предоставляется в местное Управление гражданской авиации. Такой план полета представляет собой документ, отражающий запланированный маршрут или курс полета самолета. Как правило, он включает в себя основную информацию, такую как пункты отправления и прибытия, расчетное время в пути, альтернативные аэропорты в случае плохой погоды, тип полета (в зависимости от того, применяются правила полетов по приборам или правила визуальных полетов), информацию о пилоте, количество человек на борту и информацию о самом воздушном судне.
План полета является фиксированным и не адаптируется или не меняется во время полета. Например, ветер, дующий в определенном направлении на взлетно-посадочную полосу, может привести к тому, что воздушное судно прибудет к месту стоянки с опережением плана полета по причине более короткого периода времени на рулежной дорожке. Для своевременной отправки и эффективного распределения и применения ресурсов, желательно прогнозировать фактическое время прибытия воздушного судна с точностью примерно до одной минуты. Проблема в отсутствии желаемой точности связана с тем, что ресурсы распределяются не эффективно. На практике, это приводит к тому, что обслуживающий персонал места стоянки бездействует в ожидании или приходит слишком поздно к месту стоянки для приема и обслуживания воздушного судна.
Проблема, связанная с воздушным судном, которое совершает рейс не совсем согласно плану полета, может заключаться в том, что воздушное судно может остановиться в неположенном месте стоянки, поскольку пилот видит активный дисплей на пути к месту стоянки и не догадывается, что данное место стоянки не является запланированным. Все ресурсы, например, багаж, пассажиры, и наземный обслуживающий персонал, которые были подготовлены для воздушного судна, в этот момент времени находятся у неправильного места стоянки. То же самое касается и другого воздушного судна, то есть, воздушного судна, которое, на самом деле, запланировано для этого места стоянки. Данная проблема также сохраняется и при запланированном вылете двух воздушных судов. Если воздушное судно для внутреннего рейса останавливается на месте стоянки для воздушного судна, выполняющего международный рейс, или наоборот, проблема усугубляется еще больше.
В качестве решения данной проблемы в документе ЕР 3079136 раскрыта система и способ для идентификации воздушного судна в связи с местом стоянки. В частности, способ включает в себя прием идентификационных данных и данных положения, переданных с воздушного судна, и сравнение данных положения по меньшей мере с одним положением в пределах предварительно заданной области, связанной с местом стоянки. Если принятые данные положения находятся в пределах предварительно заданной области, то способ дополнительно включает в себя определение того, ожидается ли воздушное судно в месте стоянки. Назначение системы и способа согласно документу ЕР 3079136 заключается в уменьшении риска возникновения ситуаций, когда к месту стоянки приближается неправильное воздушное судно.
Несмотря на это, по-прежнему существует необходимость в дальнейшем усовершенствовании и развитии известных из уровня техники решений.
Раскрытие сущности изобретения
В связи с вышеизложенным, задача настоящего изобретения заключается в разработке системы и способа для увеличения эффективности и безопасности подготовки к установке воздушного судна на месте стоянки и в ходе данной процедуры.
В частности, задача настоящего изобретения заключается в разработке системы управления в аэропорту.
Согласно первому аспекту, настоящее изобретение относится к системе управления в аэропорту, содержащей: блок ввода, выполненный с возможностью осуществления связи с системой наблюдения аэропорта в аэропорту, блок управления, выполненный с возможностью приема, из блока ввода, идентификационных данных для воздушного судна на земле, и данных положения, указывающих положение воздушного судна, и с возможностью предоставления идентификационных данных в устройство хранения данных и приема идентификатора назначенного места стоянки для воздушного судна из устройства хранения данных, причем блок управления дополнительно выполнен с возможностью вычисления времени задержки на основании положения воздушного судна и расчетного времени перемещения из указанного положения воздушного судна к назначенному месту стоянки, причем блок управления дополнительно выполнен с возможностью, по истечении времени задержки, выдачи сигнала в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Указанное воздушное судно на земле может представлять собой воздушное судно на взлетно-посадочной полосе сразу после посадки на нее, или воздушное судно на рулежной дорожке, которое только что переместилось со взлетно-посадочной полосы на рулежную дорожку. Другими словами, воздушное судно может находиться на взлетно-посадочной полосе непосредственно после его посадки, или может находиться на рулежной дорожке, сразу после перемещения со взлетно-посадочной полосы на рулежную дорожку. Таким образом, воздушное судно может находиться на расстоянии от места стоянки, потенциально за пределами визуальной досягаемости для наземного обслуживающего персонала и за пределами досягаемости локального приборного оборудования, которое может иметься на месте стоянки.
В известных в уровне техники решениях подготовка места стоянки относится к плану полета. Согласно пункту 1 формулы, место стоянки готовится в ответ на сигнал из блока управления в зависимости от того, находится ли воздушное судно в пределах предварительно заданного расстояния от назначенного места стоянки. Преимущество такого решения состоит в том, что процесс подготовки места стоянки может адаптироваться под изменения во время прибытия воздушного судна, а также под изменения, которые не учитываются в плане полета. Это позволяет увеличить эффективность и безопасность в аэропорту.
Как раскрыто выше, система управления может дополнительно предусматривать, что блок управления выполнен с возможностью задержки выдачи сигнала в систему управления места стоянки на основании положения воздушного судна и расчетного времени перемещения из указанного положения воздушного судна к назначенному месту стоянки. Сигнал в систему управления места стоянки может быть отложен на конкретный период времени. Это значит, что сигнал необязательно отправляется в момент времени, когда воздушное судно касается взлетно-посадочной полосы. В некоторых аэропортах это может оказаться слишком рано, поскольку воздушному судну требуется довольно много времени для того, чтобы добраться до места стоянки. Таким образом, серьезным преимуществом оказывается возможность отложить подготовку места стоянки. Предпочтительно, место стоянки должно быть подготовлено как можно позже, другими словами, точно в срок. В этой связи, назначенное место стоянки является активным, например, дисплеи подсвечиваются, при приближении воздушного судна. Это снижает вероятность того, что пилот, управляющий воздушным судном, направит его к неправильному месту стоянки.
Преимущество данного варианта осуществления состоит в том, что процесс подготовки места стоянки можно адаптировать под расчетное время перемещения для воздушного судна. Время перемещения может, например, зависеть от погодных условий, таких как ветер, от проекта аэропорта, от других транспортных средств и характеристик воздушного судна.
Расчетное время перемещения может быть вычислено на основании ожидаемого времени руления воздушного судна. Время руления может быть задано как общее время транспортировки воздушного судна со взлетно-посадочной полосы к месту стоянки и может включать в себя также время, проведенное на взлетно-посадочной полосе, то есть, время с момента касания земли воздушным судном, до момента, когда воздушное судно заезжает на соединительную рулежную дорожку. Расчетное время перемещения может быть вычислено на основании одного или более из следующего: размера аэропорта, проекта аэропорта, погодных условий, характеристик воздушного судна, того, как часто требуется повторный запуск воздушного судна, очереди на рулежной дорожке.
Альтернативно или дополнительно, расчетное время перемещения может быть вычислено на основании схемы движения транспорта.
В некоторых вариантах осуществления, система управления в аэропорту может быть реализована так, что она содержит: блок ввода, выполненный с возможностью осуществления связи с системой наблюдения аэропорта в аэропорту; блок управления, выполненный с возможность приема, из блока ввода, идентификационных данных для воздушного судна и данных положения, указывающих положение воздушного судна, и с возможностью предоставления идентификационных данных в устройство хранения данных, и приема идентификатора назначенного места стоянки для воздушного судна из устройства хранения данных, причем блок управления дополнительно выполнен с возможностью выдачи сигнала в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
В данных вариантах осуществления, блок управления может быть выполнен с возможностью выдачи сигнала в систему управления места стоянки в назначенном месте стоянки перед тем, как воздушное судно коснется земли. Другими словами, блок управления может быть выполнен с возможностью выдачи сигнала в систему управления места стоянки в назначенном месте стоянки, когда воздушное судно находится в воздухе. Это может быть целесообразным для небольших аэропортов с короткими расстояниями перемещения между взлетно-посадочной полосой и местом стоянки.
Система управления дополнительно может быть выполнена с возможностью приема плана полета из системы базы данных аэропорта, причем блок управления выполнен с возможностью определения расчетного времени прибытия воздушного судна в назначенное место стоянки, причем блок управления выполнен с возможностью обновления принятого плана полета с учетом расчетного времени прибытия.
Преимущество данного варианта осуществления состоит в том, что расчетное время прибытия в плане полета для воздушного судна будет ближе к фактическому времени прибытия воздушного судна.
Блок управления может быть выполнен с возможностью выдачи сигнала в систему управления места стоянки, когда положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Преимущество данного варианта осуществления состоит в том, что сигнал отправляется в систему управления места стоянки при обнаружении воздушного судна в пределах геозоны. Этим объясняется экономическая эффективность данного решения.
Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и некоторой подобластью взлетно-посадочной полосы в аэропорту. Предпочтительно, указанная подобласть взлетно-посадочной полосы имеет длину менее 200 м.
Преимущество данного варианта осуществления состоит в том, что он обеспечивает существенное время для подготовки места стоянки.
Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и некоторой подобластью рулежной дорожки в аэропорту. Предпочтительно, указанная подобласть рулежной дорожки имеет длину менее 100 м.
Преимущество данного варианта осуществления состоит в том, что расчетное время прибытия может быть определено с большей точностью, и при этом имеется достаточно времени для подготовки места стоянки.
Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и областью, охватывающей назначенное место стоянки. Предпочтительно, область, охватывающая назначенное место стоянки, имеет длину менее 20 м.
Преимущество данного варианта осуществления состоит в том, что расчетное время прибытия может быть определено с еще большей точностью.
Система наблюдения аэропорта может содержать по меньшей мере одно из следующего: систему автоматического зависимого наблюдения-вещания (ADS-B, от англ. Automatic Dependent Surveillance-Broadcast), многопозиционную систему наблюдения, первичный обзорный радиолокатор и вторичный обзорный радиолокатор.
Преимущество данного варианта осуществления состоит в том, что информация о положении воздушного судна может быть собрана с высокой точностью. Кроме того, факторы в аэропорту, влияющие на расчетное время прибытия воздушного судна, могут быть легко определены и, соответственно, расчетное время прибытия будет ближе к фактическому времени прибытия.
Подготовка назначенного места стоянки может включать в себя обеспечение для системы управления места стоянки возможности активирования системы визуального управления стыковкой.
Преимущество данного варианта осуществления состоит в том, что система визуального управления стыковкой с трапом не начинает работу слишком рано, что, в противном случае, могло бы привести к неправильному направлению другого воздушного судна. Кроме того, как можно более позднее начало работы системы визуального управления стыковкой с трапом также является мерой, обеспечивающей экономию энергии.
Система визуального управления стыковкой может представлять собой лазерную систему стыковки. Лазерная система стыковки может быть выполнена с возможностью сканирования бетонированной площадки назначенного места стоянки на наличие препятствий. Лазерная система стыковки может быть выполнена с возможностью сканирования бетонированной площадки назначенного места стоянки на наличие препятствий, когда положение воздушного судна находится в пределах подобласти рулежной дорожки.
Согласно второму аспекту, настоящее изобретение относится к способу, реализуемому в системе управления в аэропорту, причем указанный способ включает в себя: прием, из системы наблюдения аэропорта в аэропорту, идентификационных данных для воздушного судна на земле и данных положения, указывающих положение воздушного судна, предоставление идентификационных данных в устройство хранения данных и прием идентификатора назначенного места стоянки для воздушного судна, вычисление времени задержки на основании положения воздушного судна и расчетного времени перемещения из положения воздушного судна к назначенному месту стоянки, по истечении времени задержки выдачу сигнала в назначенное место стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна, принятое из системы наблюдения аэропорта, находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Как раскрыто выше, способ дополнительно включает в себя задержку выдачи сигнала в систему управления места стоянки на основании положения воздушного судна и расчетного времени перемещения из положения воздушного судна к назначенному месту стоянки. Сигнал может быть отложен на конкретный период времени.
Расчетное время перемещения может быть вычислено на основании ожидаемого времени руления воздушного судна. Расчетное время перемещения может быть вычислено на основании одного или более из следующего: размера аэропорта, проекта аэропорта, погодных условий, характеристик воздушного судна, того, как часто требуется повторный запуск воздушного судна, очереди на рулежной дорожке.
Альтернативно или дополнительно, расчетное время перемещения может быть вычислено на основании схемы движения транспорта.
Способ может дополнительно включать в себя прием плана полета из системы базы данных аэропорта, определение расчетного времени прибытия воздушного судна в назначенное место стоянки, и обновление принятого плана полета с учетом расчетного времени прибытия.
Способ может дополнительно включать в себя выдачу сигнала в систему управления места стоянки, когда положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Подготовка назначенного места стоянки может включать в себя активирование системы визуального управления стыковкой.
Преимущества первого аспекта в равной степени применимы в отношении второго аспекта.
Другие задачи, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания, прилагаемой формулы изобретения и чертежей.
В целом, все понятия, использованные в формуле изобретения, следует толковать в соответствии с их обычным значением в данной области техники, если явным образом не указано иное. Все ссылки на элемент, устройство, компонент, средство, этап и т.д., указанные в единственном числе, следует интерпретировать прямо как относящиеся по меньшей мере к одному экземпляру указанного элемента, устройства, компонента, средства, этапа и т.д., если явным образом не указано иное. Этапы любого способа, раскрытого в настоящем документе, не обязательно должны осуществляться в точном приведенном здесь порядке, если явным образом не указано иное.
Краткое описание чертежей
Раскрытые выше, а также дополнительные задачи, признаки и преимущества настоящего изобретения станут более понятными из нижеследующего иллюстративного и неограничивающего подробного описания предпочтительных вариантов осуществления настоящего изобретения, со ссылкой на прилагаемые чертежи, на которых одинаковые номера позиций используются для обозначения одинаковых элементов, причем на чертежах изображено следующее.
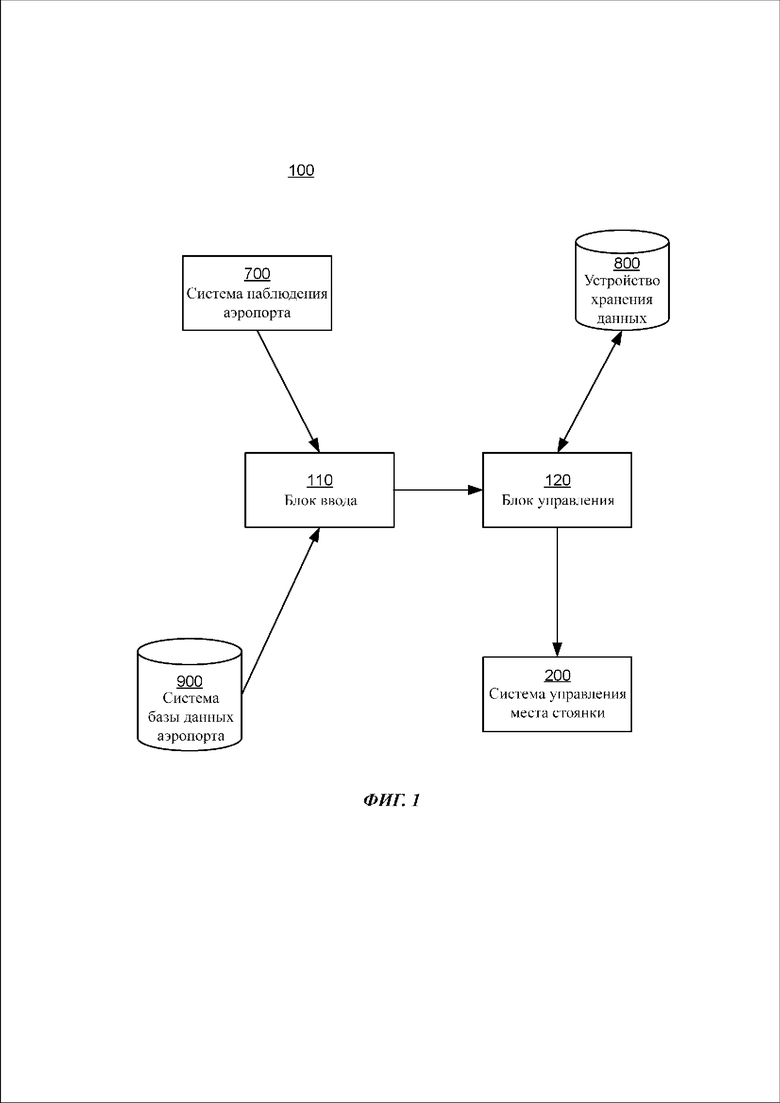
На фиг. 1 показан вариант осуществления системы управления в аэропорту согласно настоящему изобретению.
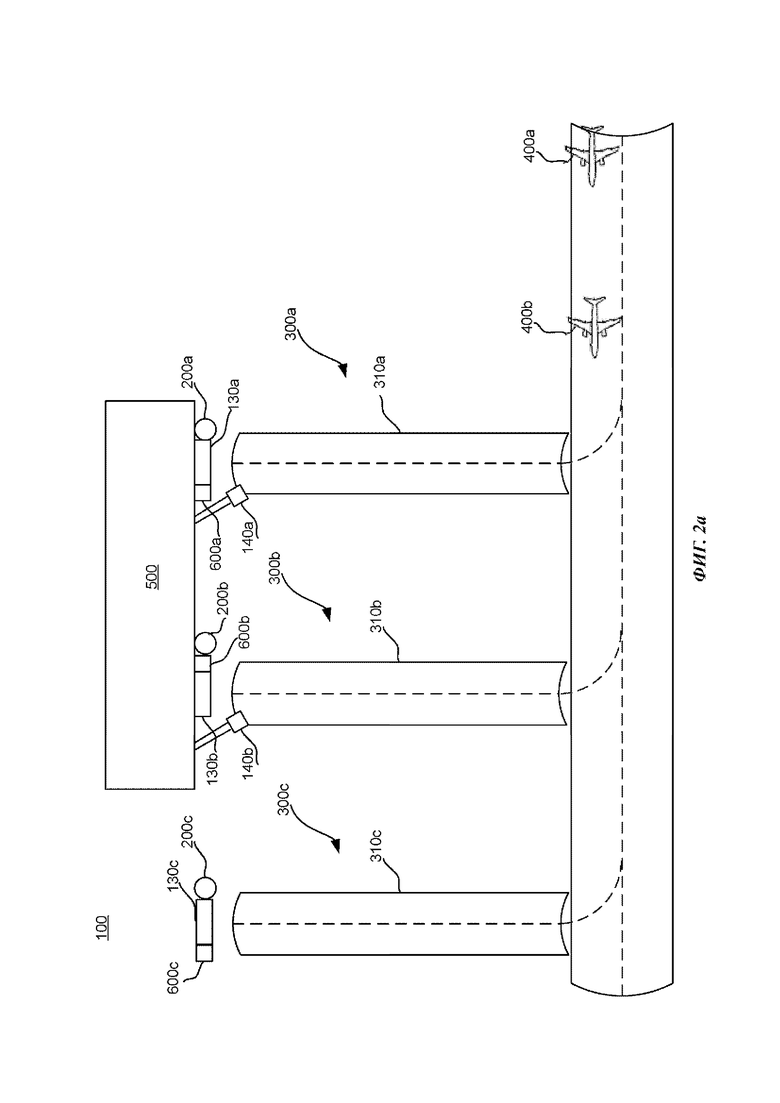
На фиг. 2а-b показан вариант осуществления системы управления в аэропорту.
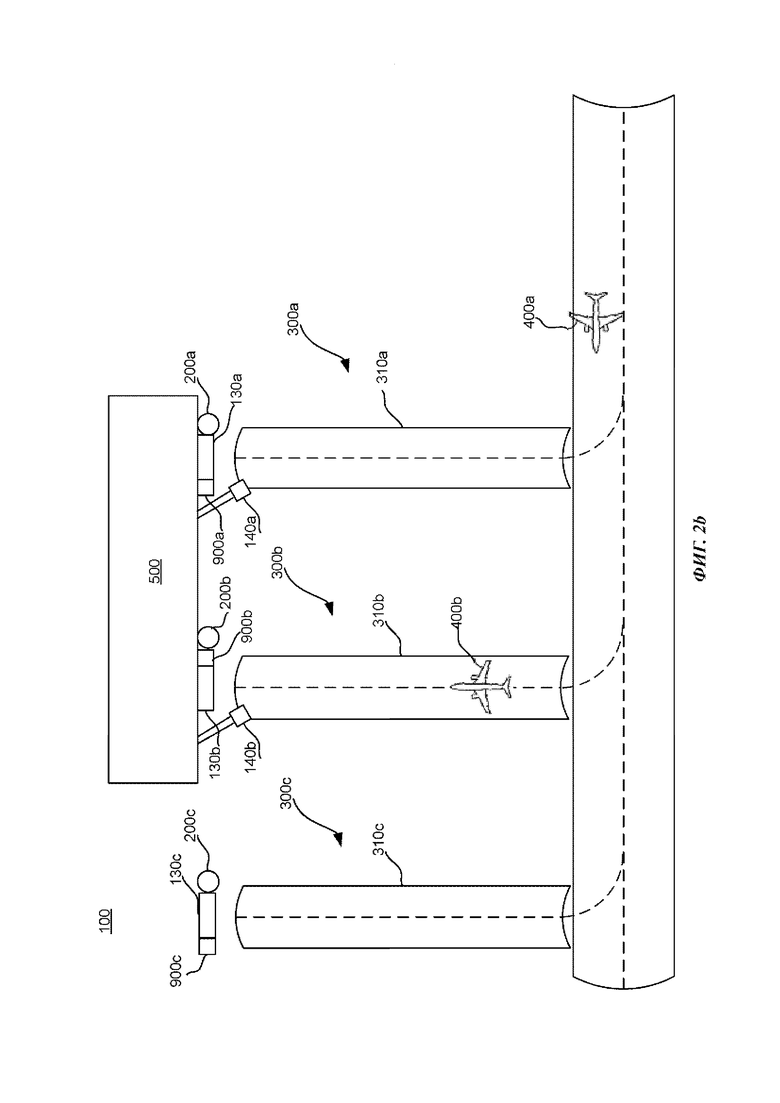
На фиг. 3а-b показаны различные положения, в которых воздушное судно может находиться, когда блок управления выдает сигнал в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки.
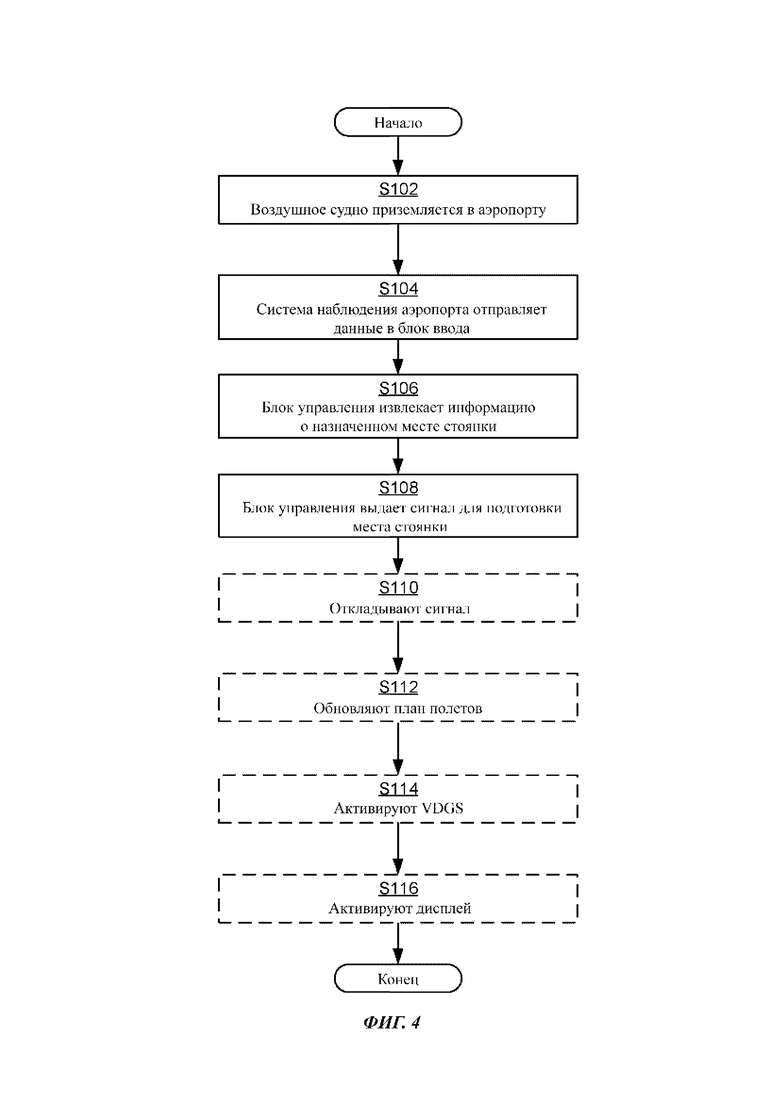
На фиг. 4 показан вариант осуществления способа согласно настоящему изобретению, реализуемого в системе управления в аэропорту.
Осуществление изобретения
Настоящее изобретение обеспечивает возможность адаптации процесса подготовки мест стоянки в аэропорту. Кроме того, возможно исключение ситуации, когда пилот направляет воздушное судно к неправильному месту стоянки. Дополнительно, ресурсы в аэропорту могут быть использованы более эффективно, а также может быть повышена безопасность в аэропорту.
Далее, описаны различные варианты осуществления системы управления в аэропорту. На фиг. 1 проиллюстрирован один из вариантов осуществления системы управления в аэропорту согласно настоящему изобретению.
Система 100 содержит блок 110 ввода, который осуществляет связь с системой 700 наблюдения аэропорта в аэропорту, и блок 120 управления.
Блок ввода может представлять собой приемник или может быть реализован в виде множества приемников. Блок 120 управления может быть реализован в виде множества компьютерных обрабатывающих блоков, которые совместно образуют блок управления, то есть несколько компьютеров могут быть соединены между собой для создания блока управления и обеспечения его функциональных возможностей, раскрытых в данном документе. Функция блока управления может совместно осуществляться множеством блоков в аэропорту.
Система 700 наблюдения аэропорта собирает информацию, такую как, например, идентификационные данные для воздушного судна на земле, и данные положения, указывающие положение воздушного судна. Система наблюдения аэропорта содержит по меньшей мере одно из следующего: систему ADS-B, многопозиционную систему наблюдения, первичный обзорный радиолокатор и/или вторичный обзорный радиолокатор. Система наблюдения аэропорта может обслуживаться аэропортом или другой стороной. Система наблюдения аэропорта может содержать один датчик или множество датчиков для системы ADS-B, многопозиционной системы наблюдения, первичного обзорного радиолокатора и/или вторичного обзорного радиолокатора. Может быть предусмотрена, например, локальная система наблюдения по существу на каждом месте стоянки. Локальная система наблюдения может содержать по меньшей мере одно из следующего: локальный датчик для системы ADS-B, многопозиционной системы наблюдения, первичного обзорного радиолокатора и вторичного обзорного радиолокатора.
Альтернативно, система наблюдения аэропорта совместно используется в аэропорту. В данном варианте осуществления система наблюдения аэропорта содержит множество датчиков, распределенных по аэропорту. Датчики могут быть предусмотрены по меньшей мере для одного из следующего: системы ADS-B, многопозиционной системы наблюдения, первичного обзорного радиолокатора и вторичного обзорного радиолокатора.
Следует отметить, что система 700 наблюдения аэропорта может быть выполнена с возможностью сбора информации об аэропорте также перед тем, как воздушное судно коснется земли.
Идентификационные данные и данные положения отправляются в блок 110 ввода из системы 700 наблюдения аэропорта или извлекаются блоком 110 ввода из системы 700 наблюдения аэропорта.
Блок 120 управления принимает, из блока 110 ввода, идентификационные данные для воздушного судна на земле, и данные положения, указывающие положение воздушного судна. Идентификационные данные могут, например, представлять собой номер рейса, код, присваиваемый Международной организацией гражданской авиации (ICAO, от англ. International Civil Organization), для летно-эксплуатационных предприятий, за которым следует номер рейса, регистрационный знак воздушного судна (обычно, идентификационный номер в буквенно-цифровом формате) и/или позывной код, устанавливаемый органами военного управления. Блок 120 управления предоставляет идентификационные данные для воздушного судна в устройство 800 хранения данных и принимает идентификатор назначенного места стоянки для воздушного судна из устройства 800 хранения данных. Устройство хранения данных может, например, представлять собой систему управления стояночной площадкой, систему диспетчерского контроля и сбора данных (SCADA, от англ. Supervisory Control And Data Acquisition), центральную оперативную базу данных аэропорта (AODB, от англ. Airport Operational Data Base) или веб-сервер. Идентификатор назначенного места стоянки может, например, представлять собой номер места стоянки.
Блок 120 управления выдает сигнал в систему 200 управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Предварительно заданное расстояние предпочтительно выбирают так, чтобы как можно позже подготовить место стоянки, например, непосредственно перед тем, как воздушное судно приблизится к месту стоянки. Благодаря этому можно уменьшить проблему пилота, направляющего воздушное судно к данному назначенному месту стоянки, даже если это место стоянки не предназначено для этого воздушного судна.
Действие по подготовке назначенного места стоянки может включать в себя обеспечение для блока управления места стоянки возможности активирования системы визуального управления стыковкой. Действие по подготовке дополнительно или альтернативно может включать в себя подготовку ресурсов, например, багажа, грузовиков и наземного обслуживающего персонала.
Система визуального управления стыковкой может содержать дисплей, отображающий, например, номер рейса, тип и вариант компоновки воздушного судна, расстояние от воздушного судна до положения остановки на месте стоянки, величину отклонения воздушного судна от центровой линии места стоянки. Система визуального управления стыковкой может, дополнительно или альтернативно, содержать лазерную систему идентификации, обеспечивающую дополнительную идентификацию самолета.
В некоторых вариантах осуществления, подготовка места стоянки разделена на несколько этапов. Например, сразу после того, как система управления места стоянки принимает сигнал для подготовки места стоянки, осуществляются некоторые подготовительные действия, но не все. Например, подготавливают такие ресурсы, как наземный обслуживающий персонал и грузовики. По истечении некоторого количества времени, готовят пассажиров, ожидающих воздушного судна. Последним этапом подготовки является активирование системы визуального управления стыковкой.
Система управления места стоянки может быть выполнена с возможностью активирования дисплея, когда положение воздушного судна находится в пределах области, охватывающей назначенное место стоянки, например, зоны места стоянки.
На фиг. 2а-b показан вариант осуществления системы управления в аэропорту. На фиг. 2а-b также показано здание 500 аэровокзала, воздушные суда 400а-b, которым предстоит стыковка, места 300а-с стоянки, и области 310а-с мест стоянки. Каждое место 300а, b стоянки может содержать телескопический трап 140а, b для стыковки воздушного судна к зданию 500 аэровокзала. Система 100 дополнительно содержит системы 200а-с управления места стоянки, предусмотренные в местах стоянки, и дисплеи или системы 130а-с визуального управления стыковкой. Система 100 также содержит лазерные системы 600а-с идентификации.
Как раскрыто ранее, подготовка места стоянки начинается в ответ на отправку блоком 120 управления сигнала в систему управления места стоянки в назначенном месте стоянки. Преимущество такого решения будет проиллюстрировано в нижеследующем примере.
На фиг. 2а, воздушное судно 400b направляется к своему назначенному месту 300b стоянки. Не показано, что воздушное судно 400а направляется к своему назначенному месту 300а стоянки. Воздушное судно 400а по-прежнему находится на рулежной дорожке. Место 300b стоянки было подготовлено для воздушного судна 400b. В одном из вариантов осуществления, дисплей 130b активируется незадолго до того, как воздушное судно 400b въезжает в зону 310b места стоянки. Альтернативно, дисплей 130b активируется в то же самое время, когда воздушное судно 400b въезжает в зону 310b места стоянки. Активирование дисплея 130b может включать в себя указание на дисплее того, что место стоянки подготовлено к приему конкретного рейса или воздушного судна. Активирование дисплея может включать в себя подсветку дисплея. Дисплей, который находится в неактивированном состоянии, указывает на то, что место стоянки не подготовлено к приему каких-либо рейсов и/или воздушного судна.
На фиг. 2а место 300а стоянки еще не подготовлено для воздушного судна 400а. Такое решение является целесообразным, поскольку в этом случае пилот воздушного судна 400b не вводится в заблуждение, например, подсвеченным дисплеем 130а. Это снижает риск того, что пилот воздушного судна 400b направит воздушное судно 400b к месту 300а стоянки.
На фиг. 2b показано воздушное судно 400b, устанавливаемое на свое назначенное место 300b стоянки. Воздушное судно 400а направляется к своему назначенному месту 300а стоянки. Место 300а стоянки подготовлено и в одном из вариантов осуществления, дисплей 130а подсвечен. В другом варианте осуществления, дисплей 130а подсвечивается, когда воздушное судно 400а входит в зону 310а места стоянки.
В одном из вариантов осуществления, блок управления выполнен с возможностью выдачи сигнала в систему управления места стоянки, когда положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки. Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и подобластью взлетно-посадочной полосы в аэропорту. Например, точность определения положения воздушного судна на взлетно-посадочной полосе, для определения предварительно заданного расстояния, предпочтительно составляет 200 м.
Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и подобластью рулежной дорожки в аэропорту. Например, точность определения положения воздушного судна на рулежной дорожке, для определения предварительно заданного расстояния, предпочтительно составляет 100 м.
Предварительно заданное расстояние может представлять собой расстояние между назначенным местом стоянки и областью, охватывающей назначенное место стоянки. Например, точность определения положения воздушного судна на рулежной дорожке, для определения предварительно заданного расстояния, предпочтительно составляет 20 м.
На фиг. 3а показан вариант осуществления, в котором блок управления выдает сигнал в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки сразу, когда воздушное судно касается земли в аэропорту. Такое решение является целесообразным для очень маленьких аэропортов, поскольку воздушное судно имеет короткий путь для движения до места стоянки. В некоторых аэропортах, блок управления выдает сигнал в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки перед тем, как воздушное судно коснется земли в аэропорту.
На фиг. 3b показан вариант осуществления, в котором блок управления выдает сигнал в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки, когда воздушное судно находится на рулежной дорожке.
В другом варианте осуществления, блок управления выполнен с возможностью задержки выдачи сигнала в систему управления места стоянки на основании положения воздушного судна и расчетного времени перемещения из положения воздушного судна к назначенному месту стоянки. Таким образом, понятно, что блок управления дополнительно выполнен с возможностью вычисления времени задержки на основании положения воздушного судна и расчетного времени перемещения из положения воздушного судна к назначенному месту стоянки. Расчетное время перемещения для воздушного судна может быть вычислено на основании ожидаемого времени руления. Кроме того, расчетное время перемещения для воздушного судна может быть вычислено с учетом по меньшей мере одного из следующих параметров: размера аэропорта, проекта аэропорта, погодных условий, характеристик воздушного судна, того, как часто требуется повторный запуск воздушного судна, очереди на рулежной дорожке. В одном из вариантов осуществления, сигнал откладывают на конкретный период времени так, что место стоянки может быть подготовлено точно в срок для воздушного судна, пребывающего в зону места стоянки. Например, по статистике известно, что среднее время перемещения от взлетно-посадочной полосы до места стоянки в конкретном аэропорту, например, составляет 5 минут при конкретных погодных условиях. В данном случае блок управления может внести задержку в 4 минуты в сигнал в систему управления для обеспечения своевременной подготовки места стоянки.
В одном из вариантов осуществления, система 100 управления, в частности, блок 110 ввода выполнен с возможностью приема плана полета из системы 900 базы данных аэропорта. Блок управления выполнен с возможностью определения расчетного времени прибытия воздушного судна на место стоянки, как раскрыто ранее. Блок 120 управления выполнен с возможностью обновления принятого плана полета с учетом расчетного времени прибытия. Обновленный план полета может быть использован, например, для обновления времени прибытия на дисплеях в здании аэровокзала для информирования людей. Также он может быть использован для планирования и подготовки места стоянки.
На фиг. 4 показан пример способа и системы согласно настоящему изобретению. На этапе S102, воздушное судно приземляется в аэропорту. На этапе S104, система наблюдения аэропорта в аэропорту отправляет идентификационные данные воздушного судна и данные положения, указывающие положение воздушного судна, в блок ввода системы управления. В одном из вариантов осуществления, данные отправляются также перед тем, как воздушное судно касается земли.
На этапе S106, блок управления извлекает из устройства хранения данных информацию о том, какое место стоянки является назначенным для воздушного судна, с использованием идентификационных данных воздушного судна.
На этапе S108, если и/или когда выполняются конкретные условия, блок управления выдает сигнал в систему управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки к приему воздушного судна.
Условия, подлежащие выполнению, могут храниться в упомянутом выше устройстве хранения данных. Альтернативно, условия могут храниться в отдельном устройстве хранения данных, устройстве хранения данных об условиях.
Одно из условий, которое следует выполнить, может, например, заключаться в том, что положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
Другое условие, которое необходимо выполнить, может, например, произойти, когда положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки.
На опциональном этапе S110, блок управления откладывает выдачу сигнала в систему управления места стоянки на основании положения воздушного судна и расчетного времени перемещения из положения воздушного судна к назначенному месту стоянки. Значения расчетного времени перемещения для аэропорта могут храниться в любом из устройств хранения данных, которые были упомянуты ранее. Устройства хранения данных могут содержать значения расчетного времени перемещения между местами стоянки аэропорта и различными положениями в аэропорту.
На опциональном этапе S112, блок управления определяет расчетное время прибытия воздушного судна в назначенное место стоянки и обновляет план полета воздушного судна с учетом расчетного времени прибытия.
На опциональном этапе S114, система управления места стоянки активирует систему визуального управления стыковкой (VDGS, от англ. Visual Docking Guidance System). На опциональном этапе S116, система управления места стоянки активирует дисплей системы визуального управления стыковкой. В одном из вариантов осуществления, этап S116 выполняют, когда положение воздушного судна находится в пределах области, охватывающей назначенное место стоянки.
Настоящее изобретение раскрыто выше, в основном, со ссылкой на несколько вариантов осуществления. Однако специалисту в данной области техники будет нетрудно понять, что в равной степени возможны другие варианты осуществления, отличные от тех, что раскрыты ранее, которые будут подпадать под объем защиты настоящего изобретения, заданный прилагаемой формулой изобретения.
Группа изобретений относится к системе и способу подготовки к установке воздушного судна на место стоянки в аэропорту. Система содержит блок ввода и блок управления. Для подготовки к установке воздушного судна в аэропорту осуществляют прием идентификационных данных и данных положения воздушного судна из системы наблюдения аэропорта, предоставляют вышеуказанные данные в устройство хранения данных, принимают идентификатор назначенного места стоянки, выдают сигнал в назначенное место стоянки для его подготовки к приему воздушного судна, если положение воздушного судна находится в пределах предварительного заданного расстояния от назначенного места стоянки. Обеспечивается повышение эффективности и безопасности подготовки к установке воздушного судна на место стоянки в аэропорту. 2 н. и 9 з.п. ф-лы, 6 ил.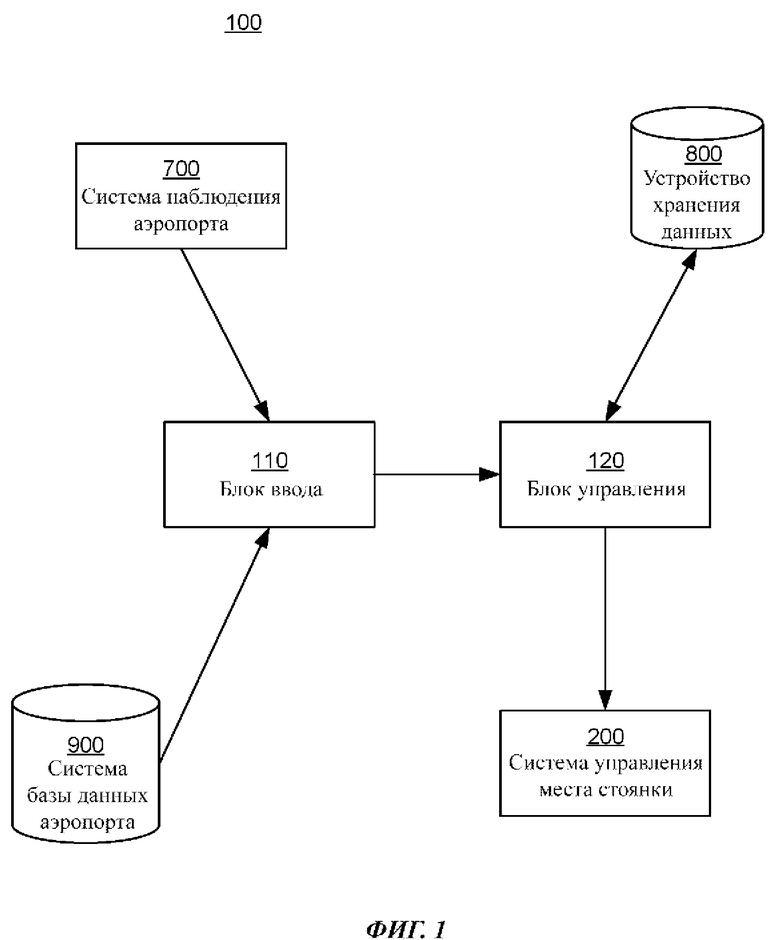
1. Система (100) подготовки к установке воздушного судна на место стоянки в аэропорту, содержащая:
блок (110) ввода, выполненный с возможностью осуществления связи с системой (700) наблюдения аэропорта,
блок (120) управления, выполненный с возможностью приема, из блока (110) ввода, идентификационных данных для воздушного судна (400а-b) на земле и данных положения, указывающих положение воздушного судна, и с возможностью предоставления идентификационных данных в устройство (800) хранения данных, и приема идентификатора назначенного места стоянки для воздушного судна из устройства хранения данных,
отличающаяся тем, что блок (120) управления дополнительно выполнен с возможностью выдачи сигнала в систему (200а-с) управления места стоянки в назначенном месте стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки,
причем блок (120) управления дополнительно выполнен с возможностью задержки выдачи сигнала в систему управления места стоянки на конкретный период времени на основании расчетного времени перемещения воздушного судна из положения воздушного судна к назначенному месту стоянки.
2. Система по п. 1, в которой предусмотрено вычисление указанного расчетного времени перемещения на основании ожидаемого времени руления воздушного судна.
3. Система по любому из пп. 1, 2, в которой предусмотрено вычисление указанного расчетного времени перемещения на основании одного или более из следующего: размера аэропорта, проекта аэропорта, погодных условий, характеристик воздушного судна, того, как часто требуется повторный запуск воздушного судна, очереди на рулежной дорожке.
4. Система по любому из пп. 1-3, выполненная с возможностью приема плана полета из системы (900) базы данных аэропорта, причем блок управления выполнен с возможностью определения расчетного времени прибытия воздушного судна в назначенное место стоянки, причем блок управления выполнен с возможностью обновления принятого плана полета с учетом расчетного времени прибытия.
5. Система по любому из пп. 1-4, в которой система наблюдения аэропорта содержит по меньшей мере одно из следующего: систему автоматического зависимого наблюдения-вещания (ADS-B), многопозиционную систему наблюдения, первичный обзорный радиолокатор и вторичный обзорный радиолокатор.
6. Система по любому из пп. 1-5, в которой подготовка назначенного места стоянки включает в себя обеспечение для системы управления места стоянки возможности активирования системы (130а-с) визуального управления стыковкой.
7. Система по п. 6, в которой система визуального управления стыковкой содержит дисплей, при этом система управления места стоянки выполнена с возможностью активирования дисплея, когда положение воздушного судна находится в пределах области (310а-с), охватывающей назначенное место стоянки.
8. Способ подготовки к установке воздушного судна на место стоянки в аэропорту, содержащий:
прием, из системы наблюдения аэропорта, идентификационных данных для воздушного судна на земле и данных положения, указывающих положение воздушного судна,
предоставление идентификационных данных в устройство хранения данных и прием идентификатора назначенного места стоянки для воздушного судна,
отличающийся тем, что содержит выдачу сигнала в назначенное место стоянки для подготовки назначенного места стоянки к приему воздушного судна, если положение воздушного судна находится в пределах предварительно заданного расстояния от назначенного места стоянки,
причем способ дополнительно содержит задержку выдачи сигнала в назначенное место стоянки на конкретный период времени на основании расчетного времени перемещения воздушного судна из положения воздушного судна к назначенному месту стоянки.
9. Способ по п. 8, в котором указанное расчетное время перемещения вычисляют на основании одного или более из следующего: размера аэропорта, проекта аэропорта, погодных условий, характеристик воздушного судна, того, как часто требуется повторный запуск воздушного судна, очереди на рулежной дорожке и ожидаемого времени руления воздушного судна.
10. Способ по п. 8 или 9, дополнительно содержащий прием плана полета из системы базы данных аэропорта, определение расчетного времени прибытия воздушного судна к назначенному месту стоянки и обновление принятого плана полета с учетом расчетного времени прибытия.
11. Способ по любому из пп. 8-10, в котором подготовка назначенного места стоянки включает в себя активирование системы визуального управления стыковкой.
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| US 20150151834 A1, 04.06.2015 | |||
| JP 2001250200 A, 14.09.2001 | |||
| Стыковой схват для рельсовых проводников | 1976 |
|
SU613111A1 |

