Изобретение относится к авиастроению и может быть использовано в конструкции оснащения летательных аппаратов беспилотными летательными аппаратами, а именно к системе и способу захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета, а также к швартовочному узлу данной системы.
Изобретение может найти применение на таких летательных аппаратах как истребители, транспортные самолеты, стратегические бомбардировщики и др.
В настоящий момент из уровня техники известны различные варианты захвата беспилотных летательных аппаратов.
Например, из источника US 2009294584 А1, 03.12.2009 известен способ захвата беспилотного летательного аппарата, который заключается в захвате беспилотного летательного аппарата установленным на неподвижной опоре рычажным манипулятором с захватным элементом, который захватывает беспилотный летательный аппарат, находящийся в полете.
Недостатком данного технического решения является то, что захват беспилотного летательного аппарата может быть осуществлен только в конкретном месте, в котором установлен рычажный манипулятор, который не может быть установлен на каком-либо летательном аппарате.
Также из уровня техники известно устройство захвата беспилотного летательного аппарата, которое содержит штангу, на которой установлены два кронштейна, между которыми располагается натянутая эластичная тетива, за которую цепляется беспилотный летательный аппарат зацепом, расположенным на его корпусе, пролетающий мимо (см. источник WO 2007055709 А, 18.05.2007).
Однако, недостатком данного технического решения является то, что уборка зацепленного беспилотного летательного аппарата является достаточно сложной.
Наиболее близким аналогом заявленного изобретения является система и способ захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета, раскрытый в источнике US 2018273176 А1, 27.09.2018. Известная система содержит летательный аппарат с грузовым отсеком с установленной в нем лебедкой, направляющую рампу, выдвигаемую из грузового отсека, и трос, один конец которого зафиксирован на лебедке, а на другом установлен улавливающий конус, предназначенный для захвата контактной части беспилотного летательного аппарата. Известный способ захвата и уборки беспилотного летательного аппарата заключается в том, что при помощи улавливающего конуса осуществляется захват беспилотного летательного аппарата, который при помощи троса и лебедки подтягивается к направляющей рампе, по которой как по рельсам беспилотный летательный аппарат поднимается в конечное положение, после чего вместе с направляющей рампой беспилотный летательный аппарат загружается в грузовой отсек летательного аппарата.
Существенным отличием данного технического решения является то, что система расположена в транспортном самолете имеющего значительные размеры грузового отсека, которые позволяют разместить манипулятор с установленной в нем лебедкой и направляющую рампу, выдвигаемую из грузового отсека для обеспечения безопасного возврата беспилотного летательного аппарата.
Задачей, на решение которой направлено заявленное изобретение является осуществление возможности зацепа и возврата беспилотного летательного аппарата во внутрифюзеляжный грузовой отсек самолета, при оптимальном использовании внутреннего пространства грузового отсека истребителя.
Техническим результатом заявленного изобретения является повышение безопасности захвата и возврата беспилотного летательного аппарата в грузовой отсек самолета, с обеспечением увеличения функциональных возможностей системы.
Данный технический результат полностью достигается заявленной совокупностью признаков независимых пунктов формулы.
Система захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета содержит складной каркас, швартовочный узел и трос. Складной каркас содержит последовательно соединенные крепежную часть, фиксируемую во внутреннем пространстве грузового отсека самолета, поворотную часть, закрепленную одним концом на крепежной части с возможностью поворота, и пространственную раму, шарнирно закрепленную на другом конце поворотной части складного каркаса, которая представляет собой две параллельные балки, соединенные дугообразными поперечными элементами. Швартовочный узел содержит соединяемые конус первичного контактирования и швартовочный конус, укрепленный на пространственной раме складного каркаса. Конус первичного контактирования закреплен на одном конце троса, который своим другим концом закреплен на наматывающем устройстве, зафиксированном на складном каркасе.
На балках пространственной рамы располагаются замки, предназначенные для фиксации беспилотного летательного аппарата.
В местах соединения в беспилотным летательным аппаратом на балках располагаются контактные поверхности.
Крепежная часть, поворотная часть и пространственная рама поворачиваются и фиксируются друг относительно друга при помощи гидравлических цилиндров.
Поворотная рама выполнена увеличиваемой по своей длине (например телескопической).
Швартовочный узел системы захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета содержит конус первичного контактирования, швартовочный конус и контактный штырь, закрепленный на беспилотном летательном аппарате. Конус первичного контактирования содержит внутреннюю конусную полость, предназначенную для захвата контактного штыря беспилотного летательного аппарата, с расположенным на ней замковым элементом, и внешнюю конусную поверхность, на меньшей стороне которой расположен фиксирующий радиальный выступ. Швартовочный конус представляет собой конусное тело с большей и меньшей сторонами, с большей стороны расположена конусная полость, предназначенная для приема конуса первичного контактирования, а на меньшей стороне швартовочного конуса расположены фиксирующие захваты механизма фиксации конуса первичного контактирования.
Способ захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета, характеризующийся тем, что содержит последовательно выполняемые этапы:
- «Сближение»,
- «Контактирование»,
- «Винчевание»,
- «Швартовка/зацеп»,
- «Уборка».
На этапе «Сближение» происходит выпуск складного каркаса из грузового отсека самолета и роспуск троса, а беспилотный летательный аппарат подходит со стороны задней полусферы к самолету.
Пространственная рама складного каркаса находится под углом к горизонтальной плоскости.
На этапе «Контактирование» происходит сцепка контактного штыря беспилотного летательного аппарата и зафиксированного на свободном конце троса конуса первичного контактирования, в полость которого входит контактный штырь беспилотного летательного аппарата и фиксируется при помощи замкового элемента.
На этапе «Винчевание» происходит выбирание сцепки конуса первичного контактирования и беспилотного летательного аппарата, заход конуса первичного контактирования во внутреннюю конусную полость швартовочного конуса.
На этапе «Швартовка/зацеп» происходит захват радиального выступа конуса первичного контактирования фиксирующими захватами механизма фиксации, расположенного на меньшей стороне швартовочного конуса, и осуществляется выпуск пространственной рамы и фиксации в ней беспилотного летательного аппарата при помощи замков, расположенных на пространственной раме.
На этапе «Уборка» осуществляется складывание складного каркаса и уборка зафиксированного беспилотного летательного аппарата в грузовой отсек самолета с последующей фиксацией в замках убранного положения.
Далее более подробно заявленное изобретение поясняется чертежами, на которых:
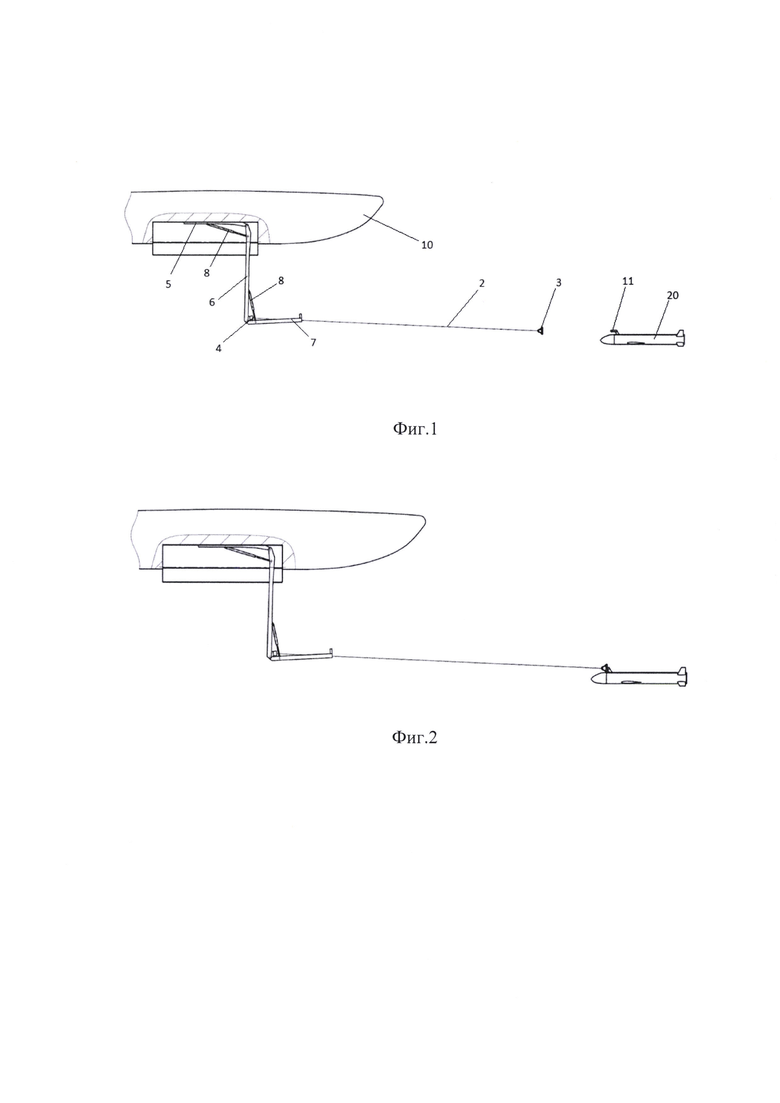
Фиг. 1 - Подлет беспилотного летательного аппарата к конусу первичного контактирования, выпущенного на тросе.
Фиг. 2 - Контактирование беспилотного летательного аппарата, с конусом первичного контактирования.
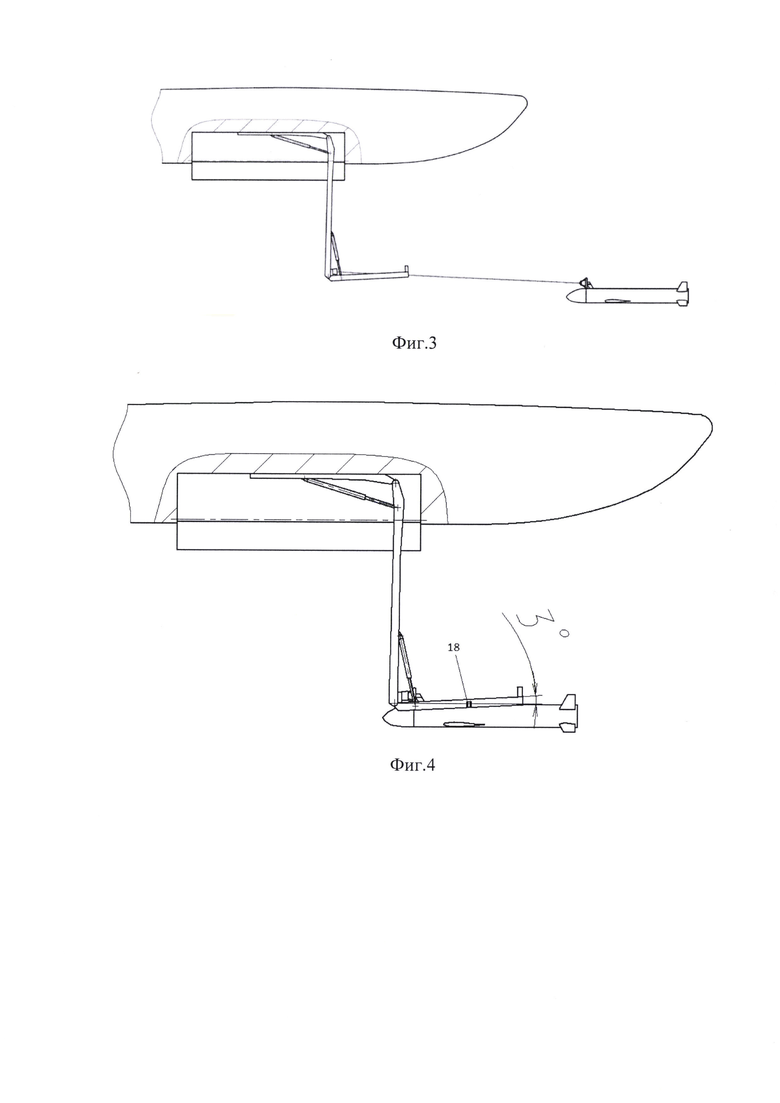
Фиг. 3 - Винчевание беспилотного летательного аппарата к швартовочному узлу.
Фиг. 4 - Швартовка (стыковка сцепки конус первичного контактирования и швартовочного конуса.
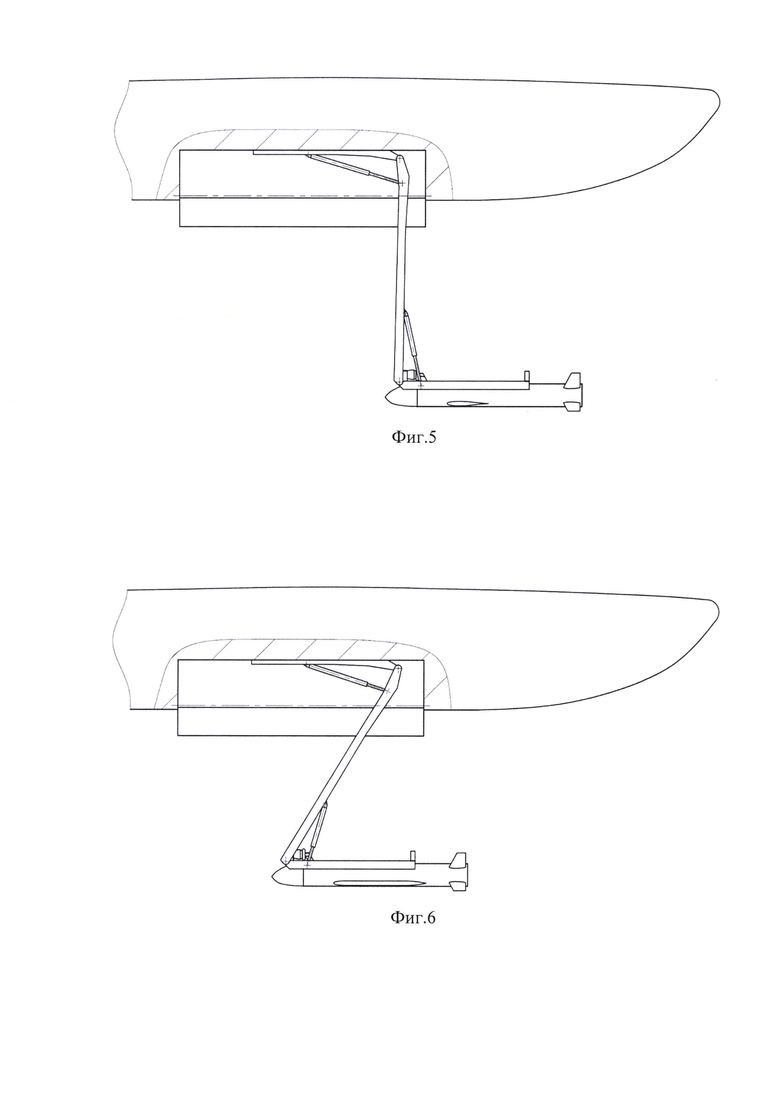
Фиг. 5 - Опускание поворотной рамы и полная фиксация беспилотного летательного аппарата в системе пуска, захвата и уборки.
Фиг. 6 - Уборка беспилотного летательного аппарата в грузовой отсек.
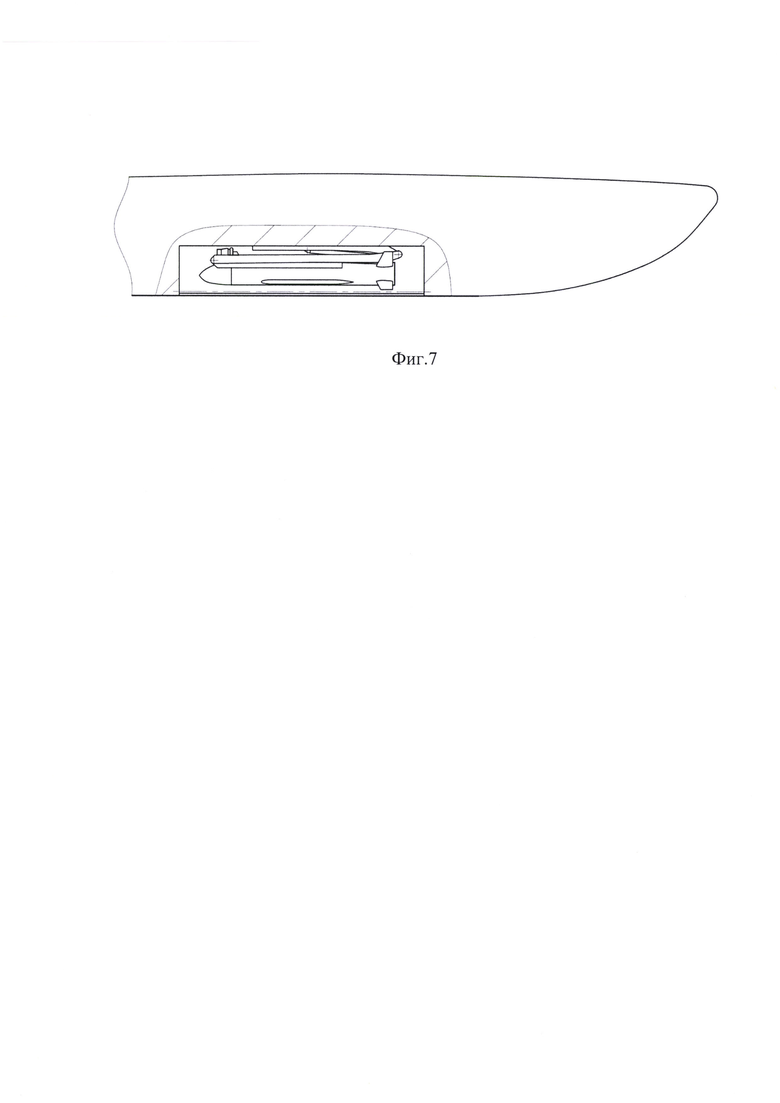
Фиг. 7 - Убранный беспилотный летательный аппарат в грузовой отсек.
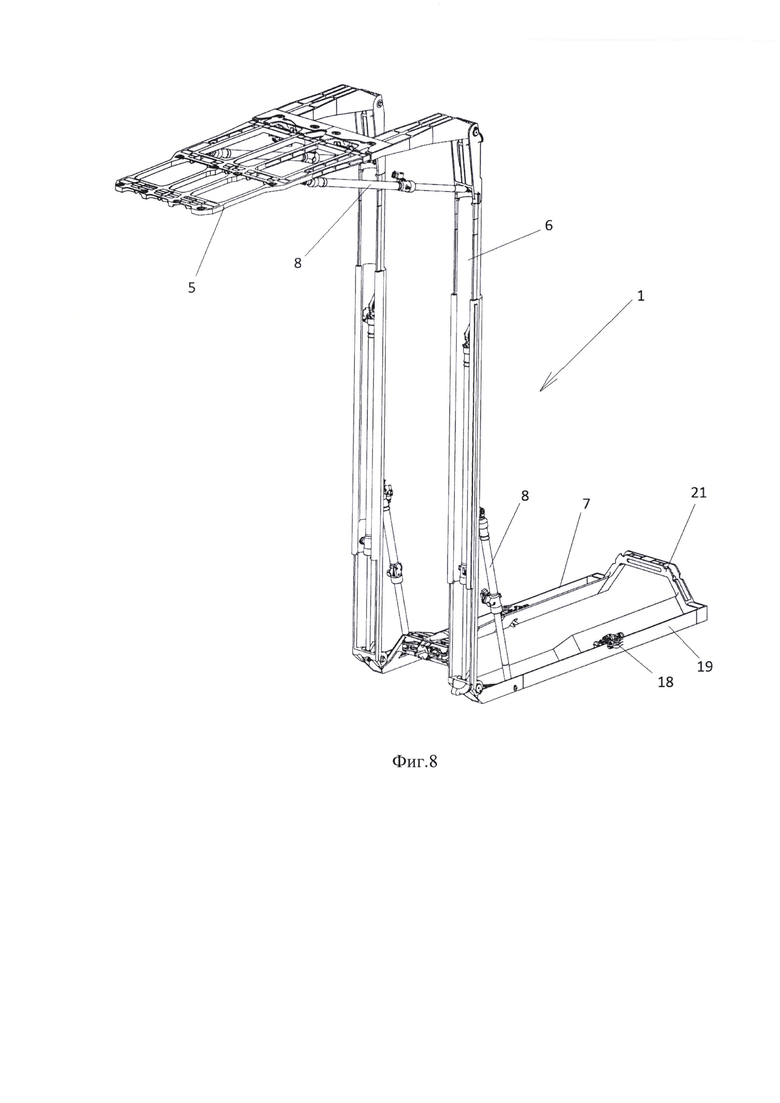
Фиг. 8 - Складной каркас системы.
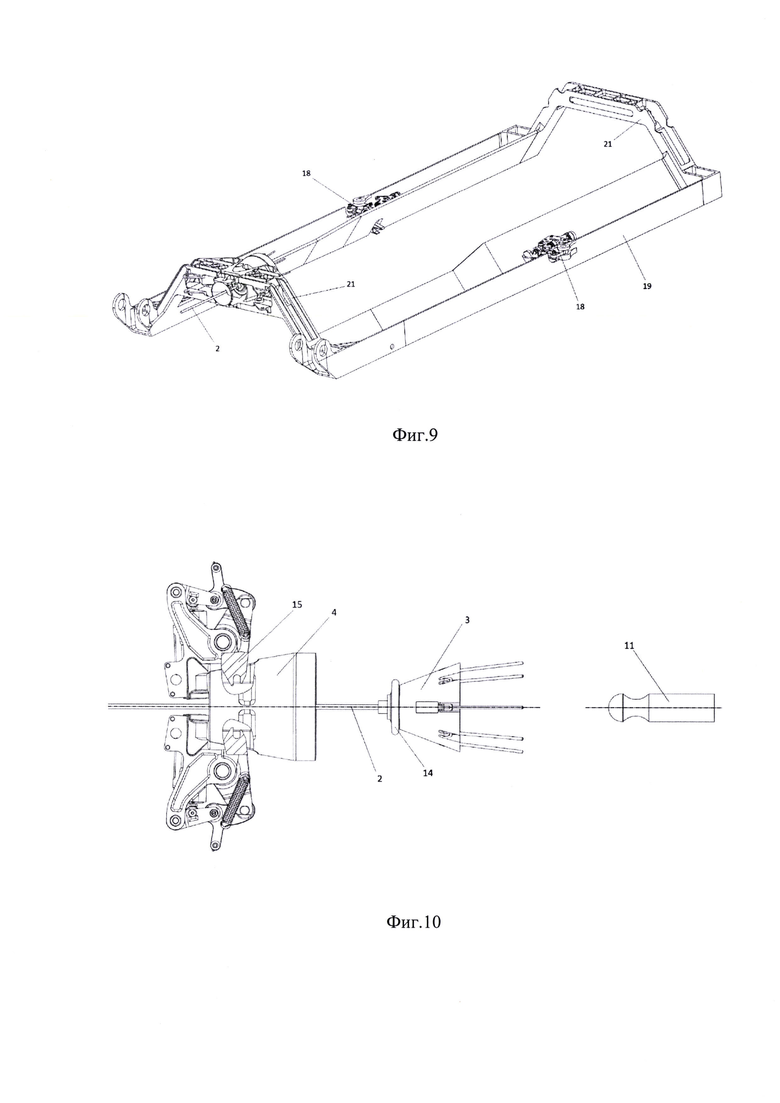
Фиг. 9 - Пространственная рама складного каркаса.
Фиг. 10 - Части швартовочного узла в раздельном виде системы захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета.
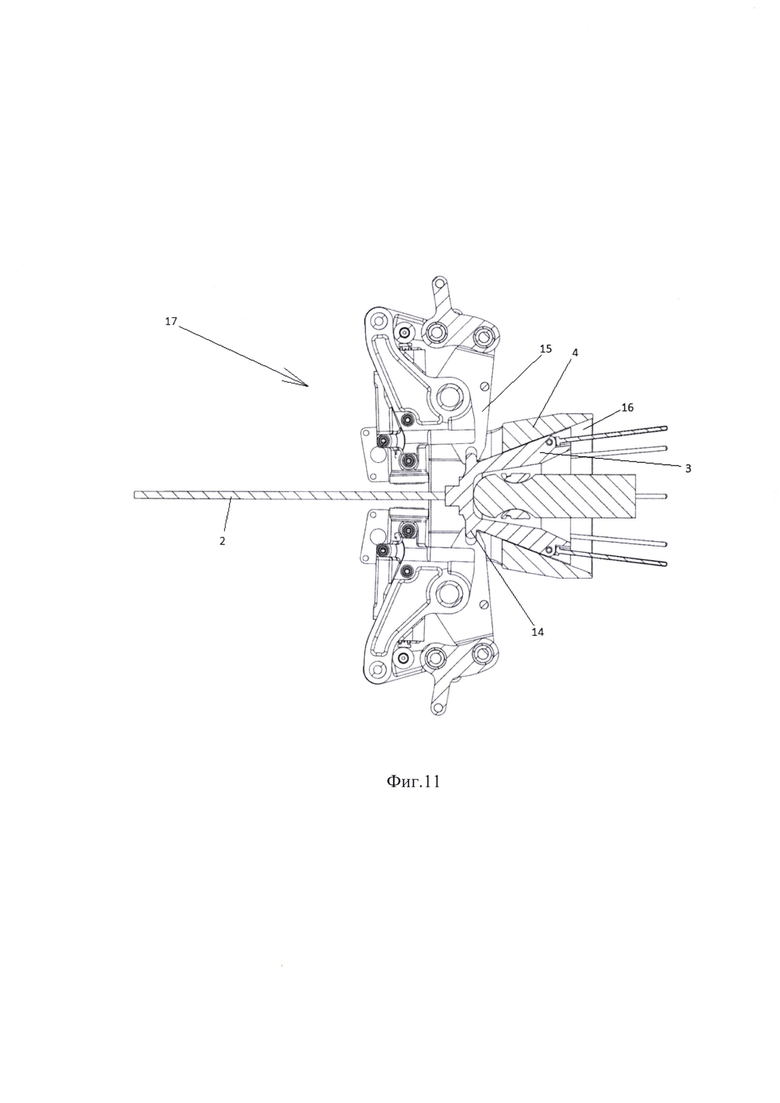
Фиг. 11 - Соединенные части швартовочного узла (в разрезе) системы захвата и уборки беспилотного летательного аппарата.
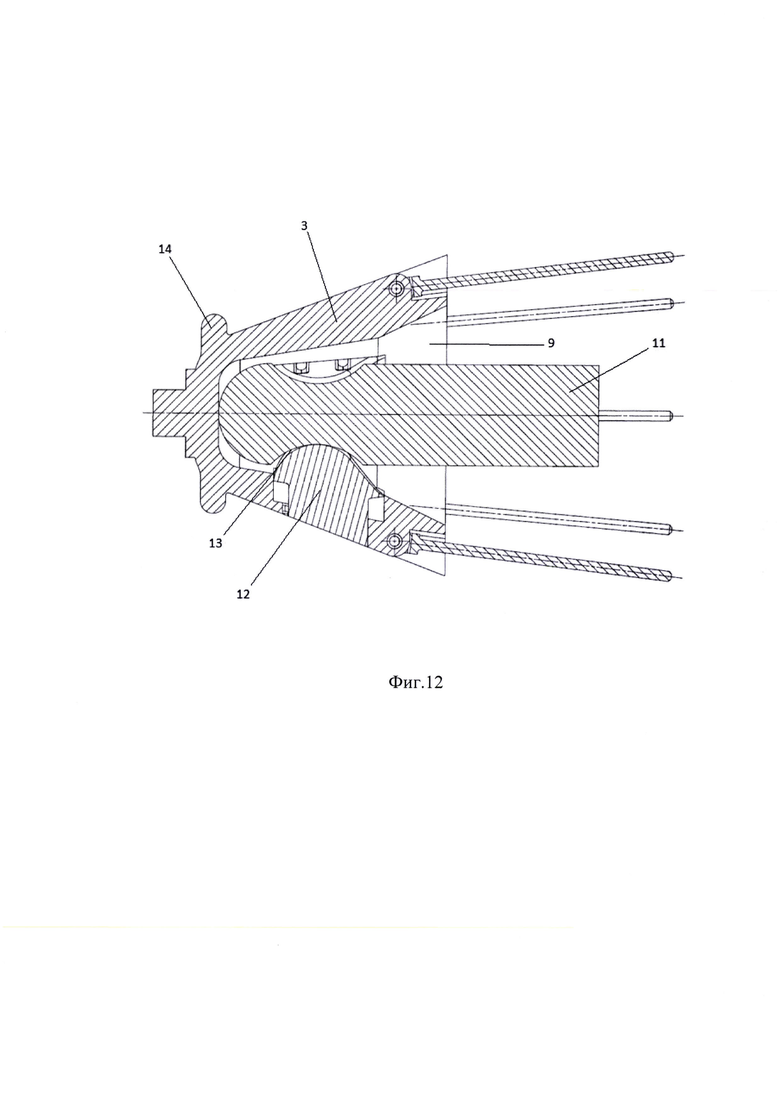
Фиг. 12 - Конус первичного контактирования в разрезе.
Заявленная система является самостоятельным дополнительно устанавливаемым узлом, который может быть установлен на самолеты различных назначений и конструкций, позволяющих по габаритам данную установку.
Система захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета содержит складной каркас (1), наматывающее устройство (мотор-лебедка) (на фиг. не показано), трос (2), конус (3) первичного контактирования и швартовочный конус (4).
Складной каркас (1) содержит последовательно соединенные крепежную часть (5), фиксируемую во внутреннем пространстве грузового отсека самолета (10), поворотную часть (6), закрепленную одним концом на крепежной части (5) с возможностью поворота, и пространственную раму (7), шарнирно закрепленную на другом конце поворотной части (6) складного каркаса (1). Возможность поворота частей (крепежная часть, поворотная часть, пространственная рама) складного каркаса (1) и фиксации в необходимом положении осуществляется за счет механизмов поворота, в частности гидравлических цилиндров (8). Поворотная часть (6) складного каркаса выполнена телескопической, т.е. выполнена складной по своей длине.
Пространственная рама (7) представляет собой две параллельные балки (19), которые соединены дугообразными поперечными элементами (21), предназначенными для охвата беспилотного летательного аппарата (20). На балках (19) пространственной рамы (7) располагаются замки (18), предназначенные для фиксации беспилотного летательного аппарата (20) при размещении его в пространственной раме (7) складного каркаса (1).
Наматывающее устройство может быть установлено на любой части складного каркаса, обеспечивающее выполнение его работы без препятствий на любом этапе возврата беспилотного летательного аппарата, например, на крепежной части (5) или на пространственной раме (7).
Конус (3) первичного контактирования представляет собой конусную конструкцию, которая меньшей своей стороной зафиксирована на тросе (2), а с большей ее стороны располагается контактная полость (9), предназначенная для захвата контактного штыря (11), закрепленного на беспилотном летательном аппарате (20). Внутри контактной полости (9) располагаются замковые элементы (12), предназначенные для захвата и фиксации контактного штыря (11) беспилотного летательного аппарата (20), на котором расположен ответный паз (13).
Снаружи меньшей стороны конуса (3) первичного контактирования расположен фиксирующий радиальный выступ (14), который предназначен для фиксации конуса (3) первичного контактирования внутри швартовочного конуса (4) при помощи фиксирующих захватов (15).
Швартовочный конус (4) представляет собой конусообразное тело с внутренней конусной полостью (16), предназначенное для размещения конуса (3) первичного контактирования. На меньшей стороне швартовочного конуса (4) расположен механизм (17) фиксации конуса (3) первичного контактирования и содержит фиксирующие захваты (15).
Трос (2) одной своей стороной закреплен на наматывающем устройстве, проходит через соосное отверстие швартовочного конуса (4) и второй своей стороной закреплен на меньшей стороне конуса (3) первичного контактирования.
Способ захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета осуществляется следующим образом:
Заявленный способ разделен на несколько этапов, каждый из которых выполняется по достижению необходимых для этого условий. Все этапы выполняются в следующем порядке:
- «Сближение»,
- «Контактирование»,
- «Винчевание»,
- «Швартовка/зацеп»,
- «Уборка».
На этапе «Сближение» беспилотный летательный аппарат (20) подходит со стороны задней полусферы на безопасное расстояние (150-300 метров) к самолету, и происходит выпуск складного каркаса из грузового отсека самолета. При полном выпуске складного каркаса, роспуске троса и отвода по потоку в заднюю полусферу самолета конуса (3) первичного контактирования этап «Сближение» завершается. При этом, угол расположения пространственной рамы (7) относительно горизонтальной плоскости выдерживается равным не менее 3°.
Для исключения соударения беспилотного летательного аппарата и самолета, а также для снижения психофизиологической нагрузки на экипаж, первичное контактирование выполняется за условной линией окончания хвостовой балки самолета.
На конусе (3) первичного контактирования имеются маяки для обеспечения точности относительной навигации и для оценки положения конуса. Конструкция и состав маяков не являются существенными для заявленного изобретения, поскольку могут использоваться любые известные маяки, подходящие по конструкции и назначению.
На этапе «Контактирование» беспилотный летательный аппарат осуществляет максимальное сближение с конусом (3) первичного контактирования, и входит контактным штырем (11) в контактную полость (9) конуса (3) первичного контактирования, в котором замковые элементы (12) входят в контакт с ответным пазом (13) контактного штыря (11) и фиксируют конус (3) первичного контактирования на беспилотном летательном аппарате (20). После выполнения данного этапа беспилотный летательный аппарат лишается одной степени свободы.
После успешного выполнения этапа «Контактирование» начинается следующий этап - «Винчевание», на котором происходит выбирание сцепки «конус (3) первичного контактирования - беспилотный летательный аппарат». Расположение при этом пространственной рамы в отклоненном на 3° от горизонтали положении обеспечивает проход беспилотного летательного аппарата (20) под дугообразными элементами (21) пространственной рамы (7) складного каркаса (1) и заход конуса (3) первичного контактирования во внутреннюю конусную полость (16) швартовочного конуса (4).
На этапе «Винчевание» система управления беспилотного летательного аппарата (20) обеспечивает стабилизацию и правильность относительного положения, тяга двигателя обеспечивает необходимую скорость подтягивания. Для обеспечения расчетного натяжения троса и безопасного сближения беспилотного летательного аппарата к самолету, а также для снижения вероятности раскачки при завышенном натяжении троса (2) беспилотный летательный аппарат оборудован системой контроля и натяжения троса (далее - СКНТ).
СКНТ представляет собой коромысленное устройство со штангой с датчиком усилия/момента для измерения силы натяжения троса при стыковке контактного штыря с конусом первичного контактирования. Условие натяжения определяется запасом силы отрыва конуса первичного контактирования от контактного штыря, а также допуском силы натяжения, не приводящий к буксировке беспилотного летательного аппарата. СКНТ является обратной связью по натяжению для наиболее вероятного попадания беспилотного летательного аппарата в швартовочный конус с целью исключения раскачки по принципу маятника.
После успешного завершения этапа «Винчевание» осуществляется следующий этап - «Швартовка/зацеп», на котором происходит фиксация сцепки конуса (3) первичного контактирования со швартовочным конусом (4) и фиксации при помощи фиксирующих захватов (15) механизма (17) фиксации.
После приведенной фиксации беспилотный летательный аппарат (20) не имеет возможности перемещения вдоль всех осей, при этом имея возможность поворота вокруг продольной оси контактного штыря (11).
После фиксации конуса (3) первичного контактирования и швартовочного конуса (4) происходит выпуск пространственной рамы (7) на 3° и сцепка замков (18) пространственной рамы (7) с ответными частями (на фиг. не показано), расположенными на беспилотном летательном аппарате (20). После окончания этапа «Швартовка/зацеп» и окончательной фиксации беспилотного летательного аппарата (20) на пространственной раме (7) начинается этап «Уборка», на котором осуществляется уборка зафиксированного беспилотного летательного аппарата (20) в грузовой отсек самолета при помощи складного каркаса (1), с последующей фиксацией в замках убранного положения.
Заявленная система за счет своей универсальной конструкции может быть также использована на внешних подвесках самолетов истребительной авиации и самолетах другого назначения, в том числе транспортных.
Заявленная система также может быть использована для отделения беспилотного летательного аппарата от самолета, которое происходит следующим образом:
В исходном положении беспилотный летательный аппарат (20) располагаясь в грузовом отсеке самолета закреплен на пространственной раме (7) сложенного складного каркаса (1) при помощи двух замков (18), стабилизация и исключение люфта БЛА осуществляется за счет механизма обжатия (на фиг. не показано). При этом контактный штырь (11) не находится в контакте с конусом (3) первичного контактирования. После выдачи команды на отделение беспилотного летательного аппарата (20) происходит раскладывание складного каркаса, после чего происходит запуск двигателей беспилотного летательного аппарата, раскрытие его крыльев, запуск всех необходимых систем и после получения команды о штатном функционировании всех систем, подтверждается команда на отделение, происходит раскрытие замков (18), расположенных на пространственной раме (7), и беспилотный летательный аппарат отделяется от складного каркаса.
Таким образом обеспечивается возможность вывода беспилотного летательного аппарата на любой высоте нахождения самолета.
С учетом приведенной выше конструкции системы, а также указанным способом обеспечивается повышение безопасности захвата и возврата беспилотного летательного аппарата в грузовой отсек истребителя, с обеспечением увеличения функциональных возможностей системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| СПОСОБ ПРИЧАЛИВАНИЯ ДИРИЖАБЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840302C1 |
| СИСТЕМА И СПОСОБ ФИКСАЦИИ ДИРИЖАБЛЯ | 2024 |
|
RU2838501C1 |
| Стыковочная система беспилотного летательного аппарата | 2018 |
|
RU2680555C1 |
| ПАРАШЮТНАЯ ПЛАТФОРМА | 2019 |
|
RU2734152C1 |
| УСТРОЙСТВО ДЛЯ ШВАРТОВКИ ФЮЗЕЛЯЖА САМОЛЕТА В ТРАНСПОРТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 1988 |
|
SU1543785A1 |
| ГРУЗОВАЯ КАБИНА ТРАНСПОРТНОГО САМОЛЕТА ПРЕИМУЩЕСТВЕННО АН-124-100 | 2005 |
|
RU2285637C2 |
| СПОСОБ СТЫКОВКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, СТЫКОВОЧНАЯ СИСТЕМА И СЦЕПНОЕ УСТРОЙСТВО | 2022 |
|
RU2791625C1 |
| Комплекс для размещения и десантирования грузов с летательного аппарата | 2018 |
|
RU2677803C1 |
Изобретение относится к авиации. Система захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета содержит складной каркас, швартовочный узел и трос. Складной каркас содержит последовательно соединенные крепежную часть (5), фиксируемую во внутреннем пространстве грузового отсека самолета, поворотную часть (6), закрепленную одним концом на крепежной части с возможностью поворота, и пространственную раму (7), шарнирно закрепленную на другом конце поворотной части (6) складного каркаса. Пространственная рама (7) представляет собой две параллельные балки, соединенные дугообразными поперечными элементами. Швартовочный узел содержит соединяемые конус первичного контактирования и швартовочный конус (4), укрепленный на пространственной раме (7) складного каркаса. Конус первичного контактирования закреплен на одном конце троса, который своим другим концом закреплен на наматывающем устройстве, зафиксированном на складном каркасе. Достигается повышение безопасности захвата и возврата беспилотного летательного аппарата в грузовой отсек истребителя. 3 н. и 4 з.п. ф-лы, 12 ил.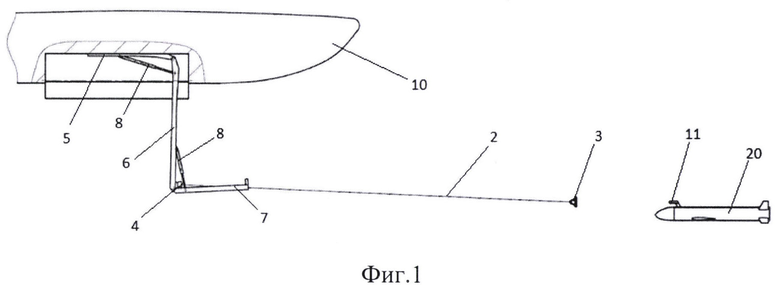
1. Система захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета, содержащая складной каркас, швартовочный узел и трос, отличающаяся тем, что складной каркас содержит последовательно соединенные крепежную часть, фиксируемую во внутреннем пространстве грузового отсека самолета, поворотную часть, закрепленную одним концом на крепежной части с возможностью поворота, и пространственную раму, шарнирно закрепленную на другом конце поворотной части складного каркаса, которая представляет собой две параллельные балки, соединенные дугообразными поперечными элементами, при этом швартовочный узел содержит соединяемые конус первичного контактирования и швартовочный конус, укрепленный на пространственной раме складного каркаса, а конус первичного контактирования закреплен на одном конце троса, который своим другим концом закреплен на наматывающем устройстве, зафиксированном на складном каркасе.
2. Система по п. 1, отличающаяся тем, что на балках пространственной рамы располагаются замки, предназначенные для фиксации беспилотного летательного аппарата.
3. Система по п. 2, отличающаяся тем, что на балках, в местах соединения с беспилотным летательным аппаратом, располагаются контактные поверхности.
4. Система по п. 1, отличающаяся тем, что крепежная часть, поворотная часть и пространственная рама поворачиваются и фиксируются друг относительно друга при помощи гидравлических цилиндров.
5. Система по п. 1, отличающаяся тем, что поворотная рама выполнена увеличиваемой по длине.
6. Швартовочный узел системы захвата и уборки беспилотного летательного аппарата в грузовой отсек самолета, характеризующийся тем, что содержит конус первичного контактирования, швартовочный конус и контактный штырь, закрепленный на беспилотном летательном аппарате, причем конус первичного контактирования содержит внутреннюю конусную полость, предназначенную для захвата контактного штыря беспилотного летательного аппарата, с расположенным на ней замковым элементом и внешнюю конусную поверхность, на меньшей стороне которой расположен фиксирующий радиальный выступ, а швартовочный конус представляет собой конусное тело с большей и меньшей сторонами, с большей стороны расположена конусная полость, предназначенная для приема конуса первичного контактирования, а на меньшей стороне швартовочного конуса расположены фиксирующие захваты механизма фиксации конуса первичного контактирования.
7. Способ работы системы по п. 1, характеризующийся тем, что содержит последовательно выполняемые этапы:
- «Сближение»,
- «Контактирование»,
- «Винчевание»,
- «Швартовка/зацеп»,
- «Уборка»,
причем на этапе «Сближение» происходит выпуск складного каркаса из грузового отсека самолета и роспуск троса, а беспилотный летательный аппарат подходит со стороны задней полусферы к самолету, причем пространственная рама складного каркаса находится под углом к горизонтальной плоскости,
- на этапе «Контактирование» происходит сцепка контактного штыря беспилотного летательного аппарата и зафиксированного на свободном конце троса конуса первичного контактирования, в полость которого входит контактный штырь беспилотного летательного аппарата и фиксируется при помощи замкового элемента,
- на этапе «Винчевание» происходит выбирание сцепки конуса первичного контактирования и беспилотного летательного аппарата, заход конуса первичного контактирования во внутреннюю конусную полость швартовочного конуса,
- на этапе «Швартовка/зацеп» происходит захват радиального выступа конуса первичного контактирования фиксирующими захватами механизма фиксации, расположенного на меньшей стороне швартовочного конуса, и осуществляется выпуск пространственной рамы и фиксации в ней беспилотного летательного аппарата при помощи замков, расположенных на пространственной раме,
- на этапе «Уборка» осуществляется складывание складного каркаса и уборка зафиксированного беспилотного летательного аппарата в грузовой отсек самолета с последующей фиксацией в замках убранного положения.
| US2018273176A1, 27.09.2018 | |||
| US6869042B2, 22.03.2005 | |||
| 0 |
|
SU163251A1 | |
| Многофункциональная летающая лаборатория (МФЛЛ) на базе транспортного самолета | 2020 |
|
RU2734170C1 |

