Изобретение относится к области средств транспорта, использующих магнитную левитацию.
Известна из источника [Sotelo, G. G., De Oliveira, R. A. H., Costa, F. S., Dias, D. H. N., De Andrade, R., & Stephan, R. M. (2014). A full scale superconducting magnetic levitation (MagLev) vehicle operational line. IEEE Transactions on Applied Superconductivity, 25(3), 1-5.] сверхпроводящая магнитнолевитационная транспортная система, содержащая: транспортное средство, снабженное транспортной кабиной, содержащей транспортируемый груз, снабженное одним или несколькими элементами магнитной левитации, выполненными, преимущественно из объемных элементов из высокотемпературных сверхпроводников, расположенных в одном или нескольких криостатах для поддержания температуры ниже точки перехода элемента в сверхпроводящее состояние, а также линейный направляющий путь, включающий одну или несколько линеек постоянных магнитов, расположенных напротив сверхпроводниковых элементов магнитной левитации в транспортном средстве с зазором, которые определяется при первоначальном захолаживании криостатов со сверхпроводящими элементами перед началом движения, и обеспечивает, как устойчивость вертикальной левитации транспортного средства в загруженном или порожнем состоянии, так и боковую устойчивость при движении, а также зоны начала движения и окончания движения линейного направляющего пути, причем линейный направляющий путь и транспортное средство снабжены линейным индукционным мотором для разгона и торможения транспортного средства, а также источником электропитания и системой управления для обеспечения безопасного движения транспортного средства по расписанию.
Однако для данной системы характерен высокий расход энергии, которая употребляется не только на работу охлаждающей системы для поддержания температуры сверхпроводниковых элементов ниже точки перехода, но и на разгон и торможение транспортного средства.
Наиболее близким аналогом заявляемого изобретения является магнитолевитационная транспортная система, известная из патента US 6418857. Система включает: транспортное средство, снабженное транспортной кабиной, содержащей транспортируемый груз, снабженное одним или несколькими элементами магнитной левитации, выполненными, преимущественно из объемных элементов из высокотемпературных сверхпроводников, расположенных в одном или нескольких криостатах для поддержания температуры ниже точки перехода элемента в сверхпроводящее состояние, а также линейный направляющий путь, включающий одну или несколько линеек постоянных магнитов, расположенных напротив сверхпроводниковых элементов магнитной левитации в транспортном средстве с зазором, который определяется при первоначальном захолаживании криостатов со сверхпроводящими элементами перед началом движения и обеспечивает, как устойчивость вертикальной левитации транспортного средства в загруженном или порожнем состоянии, так и боковую устойчивость при движении, а также содержащая зоны начала движения и окончания движения линейного направляющего пути, причем зоны начала движения и окончания движения расположены на различных высотах с зоной крейсерского движения, а зона крейсерского движения расположена ниже (с меньшей потенциальной энергией), чем зоны начала и окончания движения, для достижения высокой скорости при малом трении магнитолевитационного транспортного средства, причем зона окончания движения расположена с меньшей потенциальной энергией (ниже), чем зона начала движения для компенсации потерь энергии, которые накапливаются при движении транспортного средства и не компенсируются в ходе движения иными способами, например, линейным мотором.
Однако система обладает недостаточной надежностью движения при малой скорости при наличии значительных потерь от сопротивления движению и потерь, которые зависят от случайных факторов, например, различная масса полезной нагрузки.
Технической проблемой заявляемого изобретения является создание транспортной системы высокого качества и технологичности, надежности, экономичности, комфорта и производительности в целом.
Технический результат заявляемого изобретения заключается в повышении скорости перевозок пассажиров и грузов, а также в снижении энергозатрат на дальних и местных транспортных сетях.
Заявляемый технический результат достигается за счет того, что в известной сверхпроводящей магнитолевитационной транспортной системе, которая включает: транспортное средство, снабженное транспортной кабиной, содержащей транспортируемый груз, снабженное одним или несколькими элементами магнитной левитации, выполненными, преимущественно из объемных элементов из высокотемпературных сверхпроводников, расположенных в одном или нескольких криостатах для поддержания температуры ниже точки перехода элемента в сверхпроводящее состояние, а также линейный направляющий путь, включающий одну или несколько линеек постоянных магнитов, расположенных напротив сверхпроводниковых элементов магнитной левитации в транспортном средстве с зазором, который определяется при первоначальном захолаживании криостатов со сверхпроводящими элементами перед началом движения и обеспечивает, как устойчивость вертикальной левитации транспортного средства в загруженном или порожнем состоянии, так и боковую устойчивость при движении, а также содержащая зоны начала движения и окончания движения, а зоны начала движения и окончания движения расположены на различных высотах с зоной крейсерского движения, причем зона крейсерского движения расположена ниже (с меньшей потенциальной энергией), чем зоны начала и окончания движения, для достижения высокой скорости при малом трении магнитолевитационного транспортного средства, причем зона крейсерского движения содержит один или несколько управляющих участков, на которых линейный направляющий путь выполнен гибким, а также систему актюаторов для изменения высоты пути на управляющих участках, систему датчиков, для измерения положения и мгновенного значения скорости транспортного средства, систему автоматического контроля для обеспечения синхронного изменения высоты пути на управляющем участке при въезде на него транспортного средства для ускорения или замедления движения с целью поддержания заданного скоростного режима движения, в частности для компенсации потерь энергии при движении.
В дальнейшем предлагаемое техническое решение поясняется в связи с рисунками.
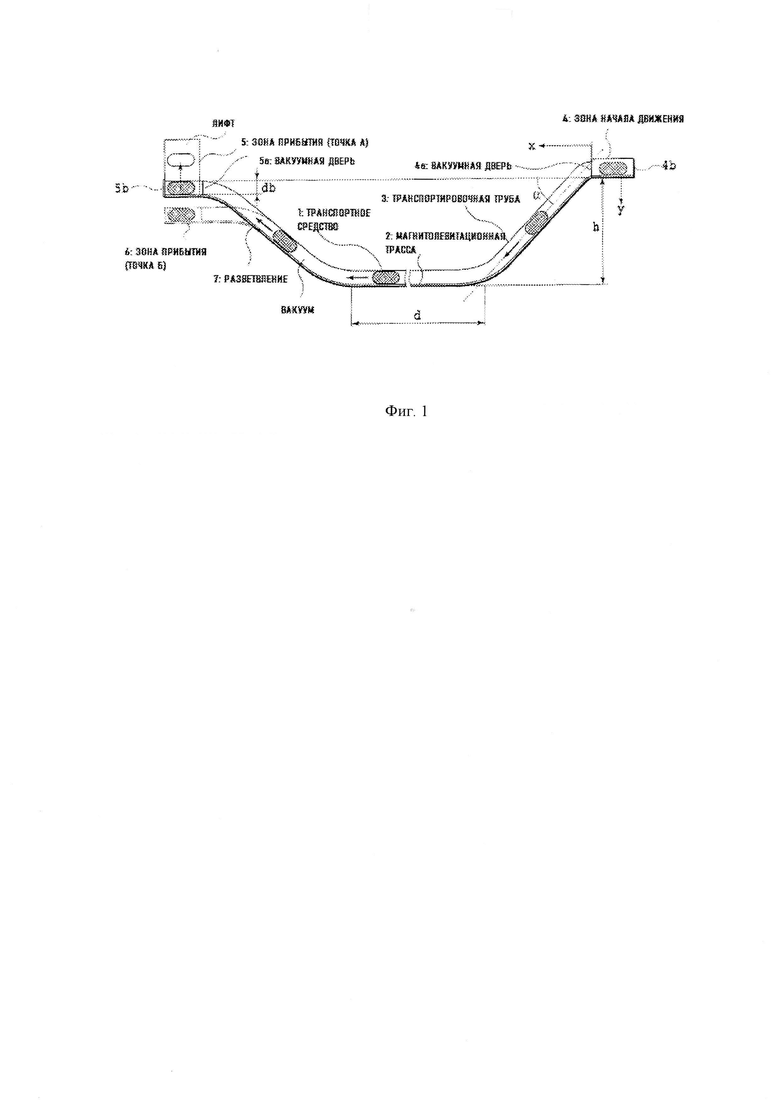
На фиг. 1 показана схема сверхпроводящей транспортной системы согласно наиболее близкому аналогу.
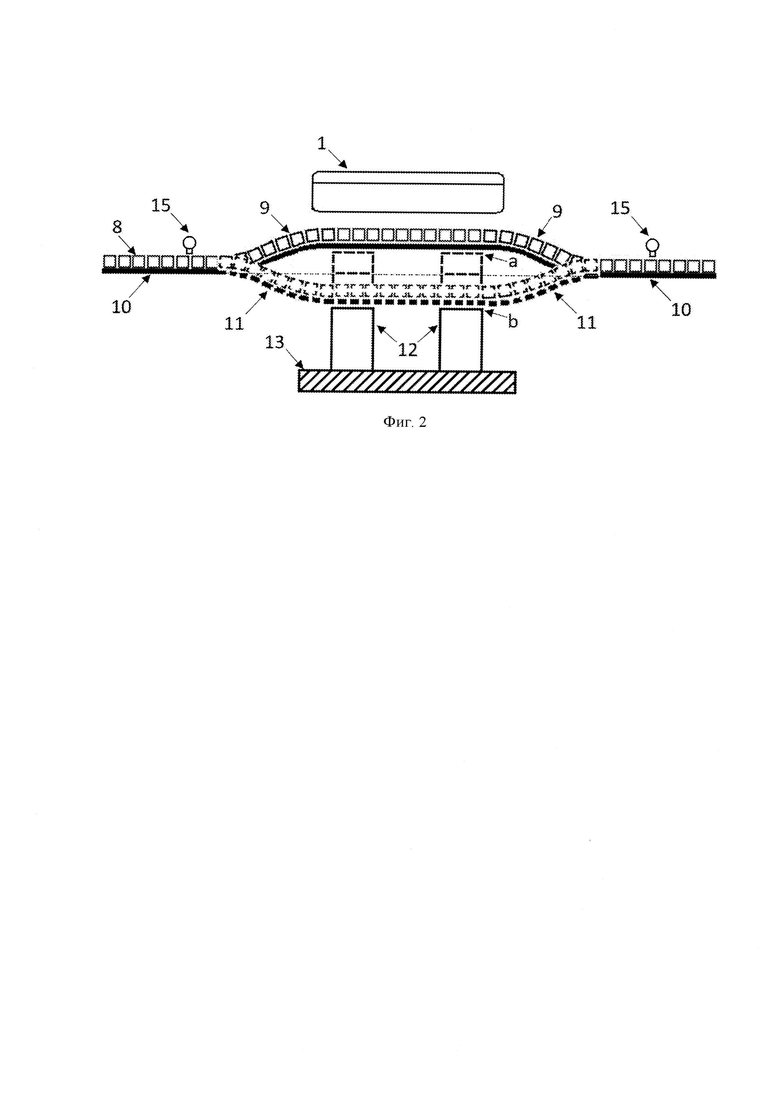
На фиг. 2 показан схематически управляющий участок линейной магнитной трассы (вид слева) для случаев повышения или снижения потенциальной энергии транспортного средства, то есть ускорения или замедления.
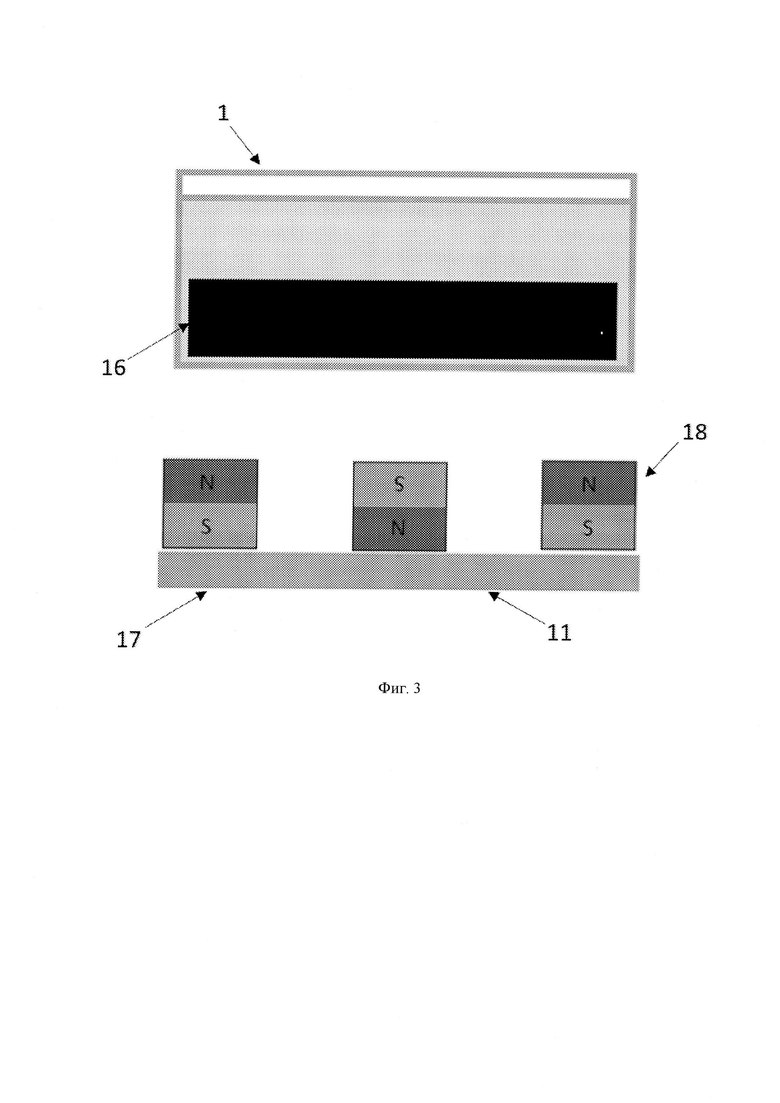
На фиг. 3 показан схематически управляющий линейный участок магнитной трассы (разрез).
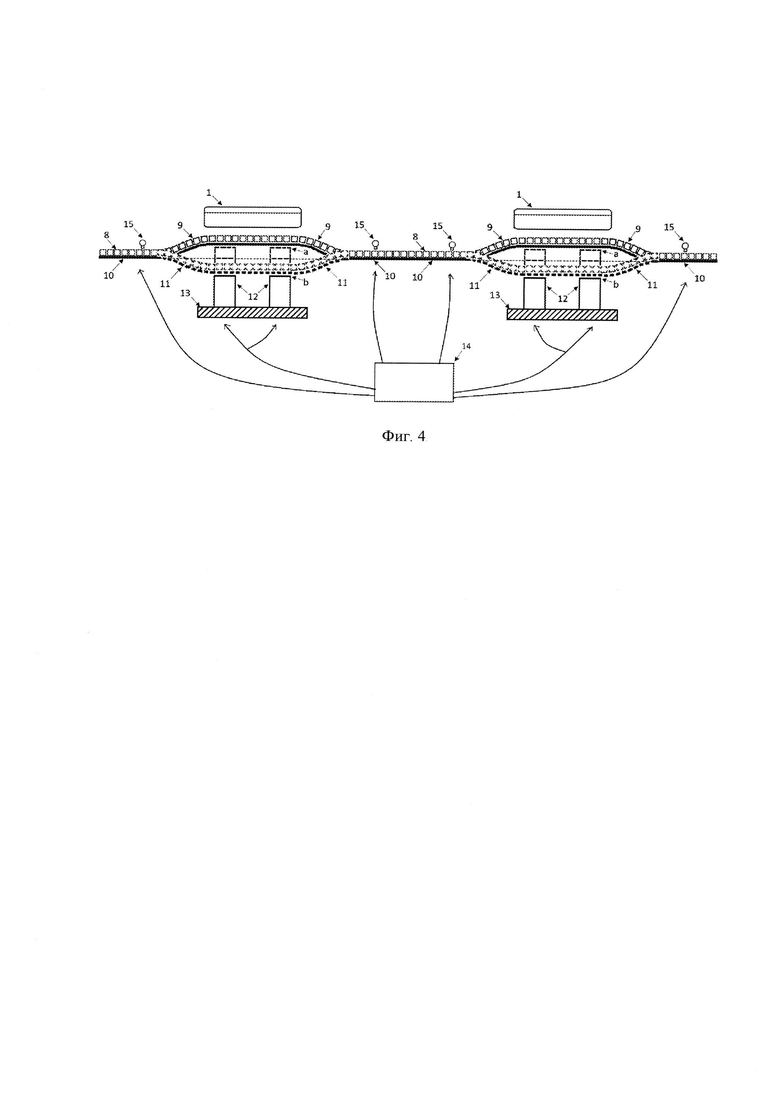
На фиг. 4 показана блок схема системы управления, обеспечивающая контроль скоростного режима движения транспортного средства.
На фиг. 5 показана фотография экспериментального макета сверхпроводящей транспортной линии по Примеру 1.
На фигурах 1-4 позициями 1-18 обозначены:
1 - транспортное средство;
2 - магнитолевитационная трасса;
3 - транспортировочная труба;
4 - зона начала движения;
5 - лифт;
6 - зона конца движения;
7 - разветвление;
8 - линейный направляющий путь;
9 - линеек постоянных магнитов;
10 - стальная полоса;
11 - резиновая лента;
12 - актюатор;
13 - основание;
14 - электронный блок;
15 - датчики;
16 - три элемента из ВТСП Y-Ba-Cu-O;
17 - трасса;
18 - три линейки постоянных магнитов Nd-Fe-B марки N42.
Новым в предложенном техническом решении, по сравнению с известным, является то, что линейный крейсерский участок содержит один или множество управляющих участков, на которых потенциальная энергия движущегося на нем транспортного средства может контролироваться путем повышения или понижения уровня трассы в зависимости от требований скоростного режима. В частности, повышение потенциальной энергии транспортного средства приводит к повышению скорости и компенсации всех видов потерь при движении транспортного средства по линейному крейсерскому участку. По сравнению с прототипом, в котором изменение потенциальной энергии транспортного средства осуществляется только на конечной зоне движения, в предлагаемом техническом решении, возможно контролировать отклонения в скоростном режиме в значительно более широких приделах. Таким образом, возможно, не только расширение радиуса движения, но и использование атмосферной среды. То есть вакуумная или разреженная атмосферная среда, которая в значительной мере удорожает и усложняет конструкцию, и снижает ее надежность, оказывается не обязательной для магнитолевитационной трассы с гравитационным разгоном и торможением транспортного средства согласно предлагаемому техническому решению по сравнению с прототипом.
Рассмотрим более детально принцип работы сверхпроводящей магнитолевитационной транспортной системы на основе высокотемпературных сверхпроводников (см., [1. Mattos, L. S., Rodriguez, Е., Costa, F., Sotelo, G. G., De Andrade, R., & Stephan, R. M. (2016). MagLev-Cobra operational tests. IEEE Transactions on applied superconductivity, 26(3), 1-4.] и схему на фиг.1) и гравитационным принципом разгона и торможения. Сверхпроводящая магнитолевитационная транспортная система по прототипу включает транспортное средство 1 в виде капсулы или кабины, в которой могут располагаться как детали движителя: элементы высокотемпературного сверхпроводника (ВТСП) второго рода в криостатах с рефрижераторами для поддержания ВТСП в сверхпроводящем состоянии, средства поддержания благоприятного климата внутри кабины, источники энергии. Линейный направляющий путь 8 состоит из нескольких линеек постоянных магнитов 9, расположенных в нижней части транспортировочной трубы 3. Ее назначение не ограничивается поддержанием вакуума, как требует наиболее близкий аналог.Для того, чтобы снизить риски безопасности движения транспортировочную трубу следует применять и в самых тихоходных магнитолевитационных системах, предназначенных, например, для внутригородских и внутриобъектовых транспортных линий. Так как случайное попадание ферромагнитных предметов (например, ключей или инструментов) на линейный направляющий путь может привести к задержке движения.
Зона начала движения 4 и лифт 5 в зоне конца движения 6 приподняты на высоту h над крейсерским участком пути длины d, который находится между ними для разгона и торможения наиболее экономичным способом - при помощи гравитационных сил. Следует отметить, что если, при традиционном способе разгона/торможения, при помощи линейного электродвигателя, и разгон и торможение требует расхода энергии, то при гравитационном способе разгона/торможения, наоборот, происходит полная рекуперация энергии (без учета аэродинамических и других потерь). То есть потенциальная энергия, запасенная в зоне начала движения, преобразуется с очень высоким КПД в кинетическую энергию на крейсерском участке. Затем она также практически полностью преобразуется в потенциальную, в зоне завершения движения.
Рассмотрим устройство управляющего участка согласное предлагаемому техническому решению и всю систему управления движением в целом (см. фиг. 2). Если бы потери отсутствовали полностью, то отсутствовала бы и потребность в контроле скорости движения. Скорость на всей длине крейсерского участка равнялась бы:

Следует отметить, что зависимость скорости от высоты, пропорционально корню квадратному из высоты. И увеличение h в разумных пределах не приводит к достижению высоких скоростей, например, недоступных авиации. Чтобы получить, для примера, скорость V=330 м/с (скорость звука) необходимо задать h=5000 м. Это значение перепада высоты, по-видимому, находится за пределами технологических возможностей строительства подземных и надземных сооружений.
Значительно больший интерес представляет поиск новых принципов сверхэкономичных и комфортных решений для внутригородского и внутри объектового транспорта. В условиях малых скоростей V (до 50 км/час) и h (до 10 м) большое значение приобретает компенсация аэродинамических сил трения, которые при атмосферном давлении могут оказаться значительными. Предлагаемое техническое решение направлено на разработку для этого технологичного и простого устройства - участка управления для увеличения энергии (а при необходимости ее уменьшения). Оно состоит из участка линейного направляющего пути, профиль которого может изменяться за счет того, что линейки постоянных магнитов 9 на участке несколько большем длины кабины транспортного средства 1 выполнен эластичным. Способность к изменению профиля достигается за счет применения вместо стальной полосы 10 резиновой ленты 11 в качестве основы, на которой крепятся постоянный магниты.
Рассмотрим, из чего состоит и как приводится в действие вся система управления управляющим участком или множеством управляющих участков. Система включает актюаторы 12 прочно закрепленные на основании 13, которые по команде электронного блока 14 поднимают а (опускают b) вертикально уровень магнитной ленты, на участке длиной более длины кабины, в тот момент, когда кабина проезжает над этим участком. Высота подъема, момент подъема и длительность подъема задаются электронным блоком 14 на основании анализа показания датчиков 15, которые измеряют мгновенное значение скорости и точное положение кабины. Изменение высоты должно производиться, когда кабина находится на линейном отрезке управляющего участка. Возвращение высоты участка в исходное положение можно проводить после того, как кабина покинет управляющий участок линии. Высота, на которую поднимается (опускается) управляющий участок определяется долей энергии, которую составили потери, например, если исходная высота зоны начала движения h=5 м, а величина потерь составляет 1%, то высота подъема должны быть 5 см.
Система управления движением должна включать датчики точного положения кабины и точного измерения скорости. Оптические датчики удовлетворяют таким требованиям. Оптический сенсор позволяет по прерыванию оптического луча определить момент приближения транспортного средства и скорость его движения в этот момент.
Несколько управляющих участков, расположенные один за другим на крейсерском участке линии позволят производить автоматически с высокой точностью коррекцию скорости кабины.
Технический эффект от применения предлагаемого решения может заключаться в том, что транспортная система будет менее энергозатратной, иметь практически неограниченный радиус действия, высокий уровень комфорта при отсутствии вибрации и шума.
Пример 1. В качестве конкретного примера реализации предлагаемого технического решения рассмотрим экспериментальную модель (см. фиг. 5), которая включает макет транспортного средства в виде тонкостенного пенопластового криостата, в котором расположены три элемента 16 из ВТСП Y-Ba-Cu-О с размерами примерно 40×40×15 мм. Трасса 17 выполнена из полосы мягкой стали 6000×50×5 мм. На полосе, на верхней ее стороне, размещены три линейки 18 постоянных магнитов Nd-Fe-B марки N42. Запуск осуществляется после предварительного захолаживания криостата с ВТСП на некоторой высоте над линейками магнитов. Оптимальная высота составляет примерно 8 мм. Повышение высоты захолаживания вызывает некоторое повышение силы левитации, но приводит к снижению сил боковой стабилизации. Зоны начала и конца движения расположены на регулируемой высоте, например, 50 см над нижним (крейсерским) участком. После захолаживания криостата жидким азотом, до его выкипания, криостат освобождается, начинает левитировать, и в дальнейшем может совершать периодические колебания с небольшим затуханием. Скорость примерно равна V=3 м/сек в нижней точке трассы. Колебания прекращаются после выкипания азота и потери сверхпроводимости. Для демонстрации гравитационного принципа разгона/торможения самый нижний участок трассы принимается за управляющий, синхронно с движением криостата его уровень приподнимается на 3-5 мм, что достаточно для полной компенсации затухания колебаний.
Пример 2. Рассмотрим вариант транспортной линии для внутриобъектовой перевозки пассажиров и/или грузов, например, багажа на вокзале, h=1 м, V=4,5 м/сек. Трасса составлена из двух линий по три линейки постоянных магнитов с размерами 20×20×20 мм. Транспортная кабина содержит четыре криостата с шестью элементами высокотемпературных сверхпроводников, как в примере 1. Грузоподъемность такой кабины, подтвержденная экспериментом, составляет, 160 кг. Для контроля высоты управляющих участков, может быть применен набор актюаторов, в качестве которых использованы гидравлические или пневматические подъемники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система магнитной левитации и боковой стабилизации магнитолевитационного транспортного средства | 2016 |
|
RU2647784C1 |
| МАГНИТНЫЙ ПОЛЮС ИЗ ОБЪЕМНЫХ ВЫСОКОТЕМПЕРАТУРНЫХ СВЕРХПРОВОДНИКОВ МАГНИТОЛЕВИТАЦИОННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573431C1 |
| СВЕРХПРОВОДНИКОВОЕ ЛЕВИТАЦИОННОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2021 |
|
RU2761157C1 |
| КАТАЛЬНАЯ ГОРА С МАГНИТОЛЕВИТАЦИОННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2525796C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СВЕРХПРОВОДЯЩИЙ НАКОПИТЕЛЬ ЭНЕРГИИ | 2015 |
|
RU2601590C1 |
| Сверхпроводящее электромагнитное устройство | 2020 |
|
RU2746072C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| УСТРОЙСТВО ТРАНСПОРТНОЙ СИСТЕМЫ И СПОСОБ РЕГУЛИРОВАНИЯ ТРАНСПОРТНО-ПАССАЖИРСКИХ ПОТОКОВ МЕГАПОЛИСА | 1995 |
|
RU2104363C1 |
| СПОСОБ ДОСТАВКИ КРИОГЕННОЙ ТОПЛИВНОЙ МИШЕНИ ДЛЯ УПРАВЛЯЕМОГО ИНЕРЦИАЛЬНОГО ТЕРМОЯДЕРНОГО СИНТЕЗА, СИСТЕМА И НОСИТЕЛЬ | 2019 |
|
RU2727925C1 |
| Вертикальный магнитолевитационный транспортный путь | 2019 |
|
RU2718858C1 |
Изобретение относится к области средств транспорта, использующих магнитную левитацию. Сверхпроводящая магнитолевитационная транспортная система содержит транспортное средство с кабиной, снабженное несколькими элементами магнитной левитации, выполненными из объемных элементов из высокотемпературных сверхпроводников, расположенных по крайней мере в одном криостате для поддержания температуры ниже точки перехода элемента магнитной левитации в сверхпроводящее состояние. Система содержит линейный направляющий путь, включающий несколько линеек постоянных магнитов, расположенных напротив сверхпроводниковых элементов магнитной левитации в транспортном средстве с зазором, и зоны начала движения и окончания движения. Зоны начала движения и окончания движения расположены на различных высотах с зоной крейсерского движения, причем зона крейсерского движения расположена ниже с меньшей потенциальной энергией, чем зоны начала и окончания движения. Зона крейсерского движения содержит по крайней мере один управляющий участок, на котором линейный направляющий путь выполнен гибким, а также систему актюаторов для изменения высоты пути на управляющем участке, систему датчиков для измерения положения транспортного средства и мгновенного значения его скорости, систему автоматического контроля для обеспечения синхронного изменения высоты пути на управляющем участке при въезде на него транспортного средства для ускорения или замедления движения. В результате повышается скорость перевозок пассажиров и грузов, а также снижаются энергозатраты на дальних и местных транспортных сетях. 1 з.п. ф-лы, 5 ил.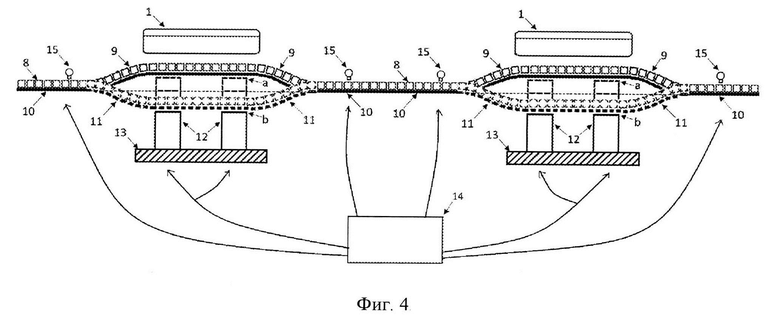
1. Сверхпроводящая магнитолевитационная транспортная система, содержащая транспортное средство с кабиной, снабженное одним или несколькими элементами магнитной левитации, выполненными из объемных элементов из высокотемпературных сверхпроводников, расположенных по крайней мере в одном криостате для поддержания температуры ниже точки перехода элемента магнитной левитации в сверхпроводящее состояние, а также линейный направляющий путь, включающий одну или несколько линеек постоянных магнитов, расположенных напротив сверхпроводниковых элементов магнитной левитации в транспортном средстве с зазором, который определяется при первоначальном захолаживании криостатов со сверхпроводящими элементами перед началом движения и обеспечивает как устойчивость вертикальной левитации транспортного средства в загруженном или порожнем состоянии, так и боковую устойчивость при движении, а также содержащая зоны начала движения и окончания движения, при этом зоны начала движения и окончания движения расположены на различных высотах с зоной крейсерского движения, причем зона крейсерского движения расположена ниже с меньшей потенциальной энергией, чем зоны начала и окончания движения, отличающаяся тем, что зона крейсерского движения содержит по крайней мере один управляющий участок, на котором линейный направляющий путь выполнен гибким, а также систему актюаторов для изменения высоты пути на управляющем участке, систему датчиков для измерения положения транспортного средства и мгновенного значения его скорости, систему автоматического контроля для обеспечения синхронного изменения высоты пути на управляющем участке при въезде на него транспортного средства для ускорения или замедления движения.
2. Сверхпроводящая магнитолевитационная транспортная система по п. 1, отличающаяся тем, что управляющий участок пути выполнен из линеек постоянных магнитов, расположенных на эластичной ленте с возможностью изгибаться и растягиваться, обеспечивая повышение или понижение потенциальной энергии при помощи актюаторов, синхронно с въездом на него транспортного средства.
| US 6418857 B1, 16.07.2002 | |||
| МОСТОВОЙ КРАН ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1926 |
|
SU5957A1 |
| ПНЕВМАТИЧЕСКАЯ ФОРСУНКА С КОНИЧЕСКИМ ЗАВИХРИТЕЛЕМ | 2017 |
|
RU2667216C1 |
| Генераторная установка для катодной защиты газовых трубопроводов | 1949 |
|
SU122761A1 |

