Изобретение относится к области приборостроения и может быть использовано при производстве твердотельных волновых гироскопов и систем ориентации и навигации на их основе.
В современном гироскопическом приборостроении известны способы определения стоячей волны относительно резонатора твердотельного волнового гироскопа, в котором измеряют сигналы ω1=Acosωtcos2υ,
ω2=Acosωtsin2υ с датчиков угла гироскопа,
где А - амплитуда колебаний резонатора,
υ - угол ориентации стоячей волны,
ω - круговая частота колебаний рабочей формы, t - время. Используя эти сигналы ,угол ориентации волны определяют из выражения 2υ=arctgω2/ω1 (см., например, книгу В.А.Матвеева, В.И.Липатникова, А.В.Алехина «Проектирование волнового твердотельного гироскопа». - М., 1998, стр.50).
В этом способе погрешности определения сигналов ω1 и ω2 обуславливают гармонические ошибки определения угла ориентации волны в зависимости от самого угла υ. Для компенсации этих погрешностей требуются трудоемкие калибровочные операции. При этом также необходимо применение алгоритмов определения четверти, в которой находится волна, обеспечивающих требуемую точность нахождения υ, когда ω1 стремится к нулю.
За прототип взят способ определения ориентации стоячей волны в твердотельном волновом гироскопе, использующий приращение на к-том такте вычислений угла ориентации волны к вычисленному углу на предыдущем к-1 такте (см. отчет ИПМ РАН №1274 «Теоретические исследования, разработка методик, программно-методического обеспечения, регулировки и испытаний твердотельного волнового гироскопа». - М., 1998).
В этом способе для определения ориентации стоячей волны в твердотельном волновом гироскопе по «измерительным» каналам косинуса «С» и синуса «S» измеряют сигналы датчиков углов гироскопа, выделяют синфазные Сф, Sф и квадратурные Скв, Sкв составляющие этих сигналов. Определяют тригонометрические функции синуса и косинуса угла ориентации стоячей волны, используя синфазные и квадратурные составляющие сигналов датчиков углов


где


Для расчета угла 4φ0 запоминают его значение и значения его тригонометрических функций на предыдущем шаге съема показаний к-1 4φ0,к-1, соз4φ0,к-1, sin4φ0,к-1.
Вычисляют новые значения тригонометрических функций на к-м шаге cos4φ0, sin4φ0,к.
Новое значение угла 4φ0,к рассчитывают по формуле

где Δ(4φ0)к=sinΔ(4φ0)к=sin4φ0,кcos4φ0,к-1-cos4φ0,кsin4φ0,к-1.
Полученное значение угла вместе с его тригонометрическими функциями запоминают для использования на следующем шаге в качестве предыдущих.
Однако в существующем способе определения ориентации стоячей волны в твердотельном волновом гироскопе существует погрешность определения угла ориентации волны относительно резонатора при ошибках выработки синфазных и квадратурных составляющих сигналов датчиков угла гироскопа. Эти погрешности имеют зависимость от самого угла расположения волны гармонического характера.
В твердотельном волновом гироскопе вырабатываются приборные значения синфазных и квадратурных составляющих сигналов датчиков угла:
где
Сф,к, Sф,к, Сф,к-1, Sф,к-1 - истинные значения синфазных составляющих по каналам косинуса «С» и синуса «S» на к и к-1 тактах вычислений;
Скв,к, Sкв,к, Скв,к-1, Sкв,к-1 - истинные значения квадратурных составляющих по каналам «С» и «S» на к и к-1 тактах;
δСф,к, δSф,к, δСф,к-1, δSф,к-1 - погрешности выработки синфазных составляющих по каналам «С» и «S» на к и к-1 тактах;
δСкв,к, δSкв,к, δСкв,к-1, δSкв,к-1 - погрешности выработки квадратурных составляющих по каналам «С» и «S» на к и к-1 тактах.
Вырабатываемые приборные значения углов на к-м и к-1 такте и приращение угла на к-м такте:
где
4φ0,к,4φ0,к-1 - истинные значения углов на к и к-1 тактах;
Δ(4φ0)к - истинное значение приращения угла на к такте;
δ4φ0,к; Δ4φ0,к-1 - погрешности выработки углов на к и к-1 тактах;
δΔ(4φ0)к - погрешность выработки угла на к-м такте.
С учетом (4) погрешность определения угла ориентации волны на к-м такте можно представить

Рассмотрим погрешность определения угла, вызванную погрешностью приращения угла δΔ(4φ0)к.
При точном задании начального угла эта погрешность обуславливает погрешность определения угла ориентации волны.
В выражениях (3) истинные значения синфазных и квадратурных составляющих по измерительным каналам косинуса и синуса можно представить:

где
a - большая полуось эллипсовидной траектории точки в плоскости CS, изображающей состояние резонатора, b - малая полуось эллипсовидной траектории точки в плоскости CS, изображающей состояние резонатора.
Используя выражения (1), (2), (3), (6), погрешность приращения угла можно представить в виде:

где
Δ(4φ0)к=sin4φ0,кcos4φ0,к-1-cos4φ0,кsin4φ0,к-1.
Компьютерное моделирование с использованием выражения (7) показало, что погрешности выработки синфазных и квадратурных составляющих вызывают ошибки в определении приращений угла ориентации волны. Эти ошибки возникают при наличии прецессионного движения волны вследствие входной угловой скорости или собственной скорости дрейфа.
На фиг.1 показаны погрешности определения приращения угла ориентации волны на такте при ошибках выработки синфазных и квадратурных составляющих по каналам косинуса и синуса датчика угла на разных углах ориентации волны и разных скоростях ее прецессии:
1 - скорость прецессии волны 12,4°/ч;
2 - скорость прецессии волны 24,8°/ч;
3 - скорость прецессии волны 37,2°/ч.
Погрешность приращения угла ориентации волны имеет синусоидальный характер с периодичностью 180° угла ориентации волны φ0, ее фазовый сдвиг и наличие постоянной составляющей зависят от величин и соотношений ошибок выработки синфазных и квадратурных составляющих.
Ширина трубки изменения этой погрешности на угле периодичности также обусловлена величиной скорости прецессии волны.
При обработке информации с гироскопа известным способом эти ошибки выработки приращения угла ориентации стоячей волны накапливаются, что снижает точностные характеристики приборов ориентации и навигации.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности выработки угла ориентации стоячей волны твердотельного волнового гироскопа относительно его резонатора.
Технический результат достигается тем, что в известном способе определения угла ориентации стоячей волны в твердотельном волновом гироскопе, включающем измерение сигналов с синусного и косинусного каналов датчика угла гироскопа, выделение синфазных и квадратурных составляющих этих сигналов, определение тригонометрических функций синуса и косинуса угла ориентации стоячей волны, используя синфазные и квадратурные составляющие сигналов, вычисление угла ориентации волны относительно резонатора гироскопа на каждом такте вычислений по формуле с применением тригонометрических функций синуса и косинуса угла волны, полученных для к-1-го и к-го тактов, а также значение угла ориентации волны на к-1-м такте, дополнительно предварительно располагают гироскоп на платформе поворотного стола таким образом, чтобы его входная ось совпадала по направлению с осью вращения платформы и была направлена вертикально, задают платформе первое эталонное значение угловой скорости и в угловом диапазоне ориентации стоячей волны относительно резонатора ±90° измеряют показания гироскопа, задают второе эталонное значение угловой скорости платформы и на этом же угловом диапазоне ориентации волны измеряют показания гироскопа, определяют разницу в ширине трубок изменений показаний гироскопа в заданном угловом диапазоне ее ориентации при разных угловых скоростях платформы, подбирают корректирующие коэффициенты для вырабатываемых приборных значений синфазных и квадратурных составляющих синусного и косинусного каналов датчика угла гироскопа, минимизирующих эту разницу в ширине трубок изменений показаний гироскопа, после чего в рабочем режиме, используя подобранные корректирующие коэффициенты, определяют угол ориентации стоячей волны относительно резонатора по формуле

где
где
Сфп,к - приборная синфазная составляющая сигнала датчика угла гироскопа по косинусному каналу на к-м такте вычислений;
Сквп,к - приборная квадратурная составляющая сигнала датчика угла по косинусному каналу на к-м такте;
Sфп,к - приборная синфазная составляющая сигнала датчика угла по синусному каналу на к-м такте;
Sквп,к - приборная квадратурная составляющая сигнала датчика угла по синусному каналу на к-м такте;
Сфп,к-1 - приборная синфазная составляющая сигнала датчика угла по косинусному каналу на к-1-ом такте вычислений;
Сквп,к-1 - приборная квадратурная составляющая сигнала датчика угла по косинусному каналу на к-1-ом такте вычислений;
Sфп,к-1 - приборная синфазная составляющая сигнала датчика угла по синусному каналу на к-1-ом такте вычислений;
Sквп,к-1 - приборная квадратурная составляющая сигнала датчика угла по синусному каналу на к-1-ом такте вычислений;
ΔСф - коэффициент, корректирующий постоянную ошибку определения
синфазной составляющей сигнала датчика угла по косинусному каналу;
ΔCкв - коэффициент, корректирующий постоянную ошибку определения квадратурной составляющей сигнала датчика угла по косинусному каналу;
ΔSф- коэффициент, корректирующий постоянную ошибку определения
синфазной составляющей сигнала датчика угла по синусному каналу;
ΔSкв - коэффициент, корректирующий постоянную ошибку определения квадратурной составляющей сигнала датчика угла по синусному каналу;
φ0,к-1 - угол ориентации волны относительно резонатора, определенный на к-1-ом такте.
При работе твердотельного волнового гироскопа вырабатываются приборные значения синфазных и квадратурных составляющих сигналов датчика угла, которые определяются выражениями (8).
Для компенсации погрешностей выработки синфазных и квадратурных составляющих в предлагаемом способе используют корректирующие члены, с учетом которых (3) имеет вид
Корректирующие коэффициенты подбирают экспериментально. Для этого предварительно располагают гироскоп на платформе поворотного стенда, задают платформе первое значение эталонной угловой скорости. На заданном угловом диапазоне ориентации стоячей волны относительно резонатора измеряют показания гироскопа, которые являются функцией угла ориентации φ0.

где
ωдо(φ0+φ1) - систематическая составляющая скорости дрейфа волны, не зависящая от угловой скорости платформы и зависящая от угла ориентации волны φ0 с начальной фазой φ1;
ωзв - вертикальная составляющая угловой скорости вращения Земли;
ωп1 - первое значение эталонной угловой скорости, задаваемой платформе;
ωд1(φ1+φ2,φп) - систематическая составляющая эквивалентной скорости дрейфа, зависящая от входной угловой скорости ωп угла ориентации волны φ0 с начальной фазой φ2;
φ2 - начальная фаза зависимости показаний гироскопа.
Задают второе эталонное значение угловой скорости платформы и на этом на угловом диапазоне движения волны измеряют ее скорость прецессии:

где
ωп2 - второе значение эталонной угловой скорости, задаваемой платформе;
φд2(φ1+φ2) - систематическая составляющая эквивалентной скорости дрейфа, зависящая от входной угловой скорости ωп и угла ориентации волны φ0 с начальной фазой φ2.
Экспериментальные исследования показали, что систематическая составляющая ωдо(φ0+φ1) имеет синусоидальную зависимость от угла φ0 с периодичностью 180°. Составляющие ω3В,ωп1,ωп2 в выражениях (10) (11) являются постоянными составляющими. Составляющие ωд1(φ0+φ2), ωд2(φ0+φ2), как показано на фиг.1, имеют синусоидальную зависимость от угла φ0. Фазы φ1 и φ2 могут быть разными и быть обусловлены конструкционными параметрами и погрешностями выработки синфазных и квадратурных составляющих сигнала датчика угла гироскопа.
Таким образом, зависимости ω1(φ0+φ3,ωп) и ω2(φ0+φ3,ωп) являются синусоидальными и периодическими. Их изменения на заданном угловом диапазоне ориентации волны при измерениях можно характеризовать шириной трубок соответственно Δ1 и Δ2.
Учитывая, что ωд1(φ0+φ2,ωn) и ωд2(φ0+φ2,ωn) также зависят от погрешностей выработки синфазных и квадратурных составляющих сигналов по информационным каналам косинуса и синуса, то подбирают корректирующие коэффициенты к этим синфазным и квадратурным составляющим таким образом, чтобы обеспечить минимальную разницу между Δ1 и Δ2, что происходит, когда ωд1(φ0+φ2,ωn) и ωд2(φ0+φ2,ωn) стремятся к нулевой величине.
Используя соотношения (7) с учетом (6) и (9), получаем рабочую формулу (8) предлагаемого способа определения угла ориентации стоячей волны.
Таким образом, предлагаемый способ определения угла ориентации стоячей волны в твердотельном волновом гироскопе имеет следующие отличия от известного способа:
введена новая операция - предварительная корректировка вырабатываемых системой обработки информации гироскопа синфазных и квадратурных составляющих сигналов и квадратурных составляющих сигналов его датчиков угла, включающая:
а) новые действия по установке гироскопа на платформу поворотного стола и заданию с помощью платформы последовательно двух значений угловых скоростей по входной оси гироскопа;
б) новое действие по измерению показаний гироскопа на одном и том же задаваемом угловом диапазоне ориентации стоячей волны относительно резонатора при двух угловых скоростях, действующих по входной оси гироскопа,
в) новое действие по определению разности в ширине трубок изменения показаний гироскопа при двух угловых скоростях по входной оси гироскопа;
г) новое действие по подбору корректирующих коэффициентов для вырабатываемых значений синфазных и квадратурных составляющих сигналов; датчика угла гироскопа, минимизирующих разницу в ширине трубок изменений показанию гироскопа при разных угловых скоростях по входной оси гироскопа.
- угол ориентации стоячей волны относительно резонатора определяют по новой аналитической зависимости, в которой используют уточненные вырабатываемые значения синфазных и квадратурных составляющих сигналов датчика угла гироскопа.
На фиг.1 изображены погрешности выработки приращения угла ориентации волны на такте при ошибках выработки синфазных и квадратурных составляющих по каналам косинуса и синуса датчика угла на разных углах ориентации волны и разных скоростях ее прецессии волны.
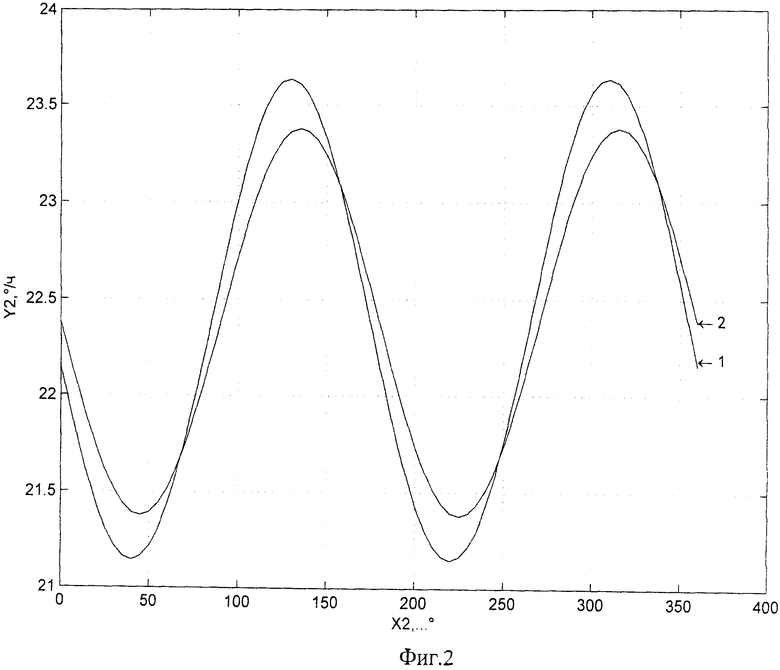
На фиг.2 изображены показания гироскопа в зависимости от угла ориентации относительно резонатора волны при входной угловой скорости 10°/ч.
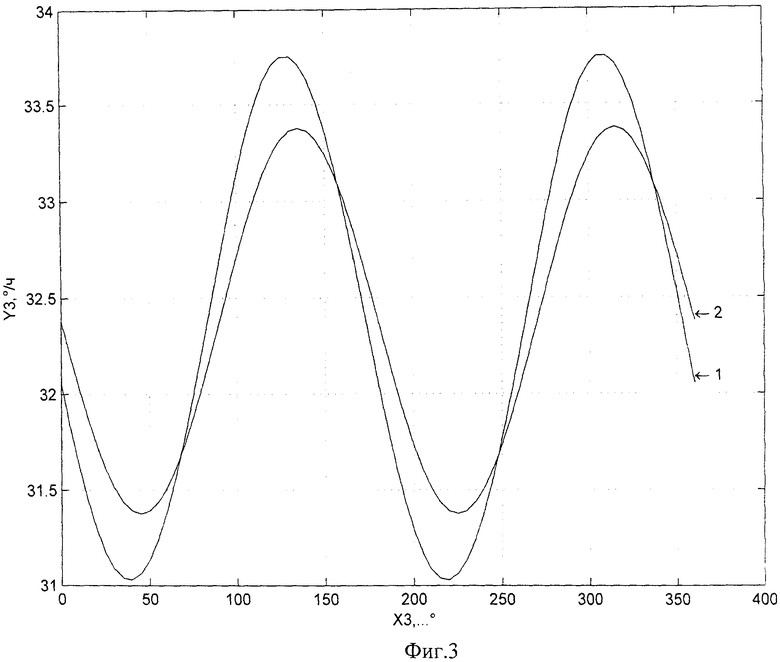
На фиг.3 изображены показания гироскопа в зависимости от угла ориентации волны относительно резонатора при входной угловой скорости 20°/ч.
Проведены компьютерные расчеты погрешности выработки приращения угла ориентации волны при ошибках выработки синфазных и квадратурных составляющих по каналам косинуса и синуса датчика угла.
Расчет проводился с применением соотношений (7) и использованием следующих параметров:
- частота обновления информации f=50 Гц;
- длительность такта обновления информации ΔТ=0,02 с;
- нормированное значение большой полуоси эллипсовидной траектории точки в плоскости CS, изображающей состояние резонатора, на к-ом и к-м тактах ак-1=ак=1;
- нормированное значение малой полуоси эллипсовидной траектории точки в плоскости CS, изображающей состояние резонатора, bк-1=bк=0,1ак;
- погрешности выработки синфазных составляющих по каналам косинуса и синуса δСф,к, δСф,к-1, δSф,к, δSф,к-1 и квадратурных составляющих δСкв,к, δСкв,к-1, δSкв,к, δSкв,к-1 составляет 1% соответственно от ак и bк;
- собственная скорость дрейфа, не зависящая от угловой входной скорости 
На фиг.1 оси имеют обозначения: х1=φ0, Y1=δΔ(φ0).
Выполнено компьютерное моделирование предлагаемого способа.
При моделировании использовали представленные выше параметры и ошибки гироскопа. По входной оси гироскопа задавали первое значение угловой скорости ωп=10°/ч.
При этом задавали также в соответствии с (10)
ωД0=-1·sin(2φ0+φ1) °/ч, где φ1=0; ωзв=12,4 °/ч.
Результаты расчетов представлены на фиг.2 зависимостью 1.
Результаты расчетов при втором значении входной угловой скорости
ωп2=20 °/ч представлены на фиг.3 зависимостью 1.
На фиг.2 и фиг.3 оси имеют обозначение Х2=ХЗ=φ0, Y2=ω1, Y3=ω2.
Из сравнения зависимостей 1 на фиг.2 и фиг.3 определяли разность в ширине трубок изменения показаний, которая составила 0,25 °/ч.
Добиваясь устранения этой разницы, были подобраны корректирующие коэффициенты для синфазных и квадратурных составляющих. При точном подборе корректирующих коэффициентов были получены зависимости показаний 2, представленных на фиг.2 и фиг.3, которые не имеют отличия в ширине трубок изменения показаний.
Таким образом, были подобраны корректирующие коэффициенты для рабочей формулы (8) определения угла ориентации стоячей волны относительно резонатора.
Погрешности выработки приращения угла ориентации волны на такте рассчитывались при разных угловых скоростях, направленных по входной оси гироскопа, которые представлены на фиг.1 в виде зависимостей 1, 2, 3 соответственно для угловых скоростей 12,4 °/ч, 24,8 °/ч, 37,2 °/ч.
Применение предлагаемого способа обеспечивает сохранение точности коррекции при разных угловых скоростях, действующих по входной оси гироскопа.
Таким образом, использование предлагаемого способа определения угла ориентации стоячей волны в твердотельном волновом гироскопе позволяет повысить его точность при наличии изменяющейся входной угловой скорости.
Повышение точности твердотельного волнового гироскопа расширяет область его применения, например, появляется возможность его использования в инерциальных навигационных системах и системах ориентации авиационного, морского и космического применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ КОНТРОЛЯ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 2011 |
|
RU2491508C1 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2013 |
|
RU2529649C1 |
| СПОСОБ БАЛАНСИРОВКИ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2580175C1 |
| Твердотельный волновой гироскоп | 2019 |
|
RU2708907C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2516697C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА И РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528170C1 |
| Способ контроля физических параметров резонатора твердотельного волнового гироскопа | 2021 |
|
RU2783189C1 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
Изобретение относится к области точного приборостроения и может быть использовано при создании твердотельных волновых гироскопов и систем ориентации и навигации на их основе. Способ заключается в том, что предварительно располагают гироскоп на платформе поворотного стола таким образом, чтобы его входная ось совпадала по направлению с осью вращения платформы и была направлена вертикально. Задают платформе последовательно два эталонных значения угловой скорости и в угловом диапазоне ориентации стоячей волны ±90° измеряют показания гироскопа, определяют разницу в ширине трубок изменений показаний гироскопа в заданном угловом диапазоне ее ориентации при разных угловых скоростях платформы. Подбирают корректирующие коэффициенты для вырабатываемых приборных значений синфазных и квадратурных составляющих синусного и косинусного каналов датчика угла гироскопа, обеспечивающих минимизацию этой разницы в ширине трубок изменения показаний гироскопа, а в рабочем режиме определяют угол ориентации стоячей волны относительно резонатора с помощью аналитического выражения, параметры которого скорректированы в результате предварительной операции. Изобретение обеспечивает повышение точности выработки угла ориентации стоячей волны твердотельного волнового гироскопа относительно его резонатора. 3 ил.
Способ определения угла ориентации стоячей волны в твердотельном волновом гироскопе, включающий измерение сигналов с синусного и косинусного каналов датчика угла гироскопа, выделение синфазных и квадратурных составляющих этих сигналов, определение тригонометрических функций синуса и косинуса угла ориентации стоячей волны, используя синфазные и квадратурные составляющие сигналов, вычисление угла ориентации волны относительно резонатора гироскопа на каждом такте вычислений по формуле с применением тригонометрических функций синуса и косинуса угла волны, полученных для к-1-го и к-го тактов, а также значение угла ориентации волны на к-1-м такте, отличающийся тем, что предварительно располагают гироскоп на платформе поворотного стола таким образом, чтобы его входная ось совпадала по направлению с осью вращения платформы и была направлена вертикально, задают платформе первое эталонное значение угловой скорости и в угловом диапазоне ориентации стоячей волны относительно резонатора ±90° измеряют показания гироскопа, задают второе эталонное значение угловой скорости платформы и на этом же угловом диапазоне ориентации волны измеряют показания гироскопа, определяют разницу в ширине трубок изменений показаний гироскопа в заданном угловом диапазоне ее ориентации при разных угловых скоростях платформы, подбирают корректирующие коэффициенты для вырабатываемых приборных значений синфазных и квадратурных составляющих синусного и косинусного каналов датчика угла гироскопа, минимизирующих эту разницу в ширине трубок изменения показаний гироскопа, после чего в рабочем режиме, используя подобранные корректирующие коэффициенты, определяют угол ориентации стоячей волны относительно резонатора по формуле
φ0,к=0,25·(nкmк-1-mкnк-1)+φ0,к-1,
где
Сфп,к - приборная синфазная составляющая сигнала датчика угла гироскопа по косинусному каналу на к-м такте вычислений;
Сквп,к - приборная квадратурная составляющая сигнала датчика угла по косинусному каналу на к-м такте;
Sфп,к - приборная синфазная составляющая сигнала датчика угла по синусному каналу на к-м такте;
Sквп,к - приборная квадратурная составляющая сигнала датчика угла по синусному каналу на к-м такте;
Сфп,к-1 - приборная синфазная составляющая сигнала датчика угла по косинусному каналу на к-1-ом такте;
Сквп,к-1 - приборная квадратурная составляющая сигнала датчика угла по косинусному каналу на к-1-ом такте;
Sфп,к-1 - приборная синфазная составляющая сигнала датчика угла по синусному каналу на к-1-ом такте;
Sквп,к-1 - приборная квадратурная составляющая сигнала датчика угла по синусному каналу на к-1-ом такте;
ΔСф - коэффициент, корректирующий постоянную ошибку определения синфазной составляющей сигнала датчика угла по косинусному каналу;
ΔСкв - коэффициент, корректирующий постоянную ошибку определения квадратурной составляющей сигнала датчика угла по косинусному каналу;
ΔSф - коэффициент, корректирующий постоянную ошибку определения синфазной составляющей сигнала датчика угла по синусному каналу;
ΔSкв - коэффициент, корректирующий постоянную ошибку определения квадратурной составляющей сигнала датчика угла по синусному каналу;
φ0,к-1 - угол ориентации волны относительно резонатора, определенный на к-1-ом такте.
| Карбюратор для двигателей внутреннего горения | 1924 |
|
SU1274A1 |
| МАТВЕЕВ В.А | |||
| ид | |||
| Проектирование волнового твердотельного гироскопа, М., Изд-во МГТУ им | |||
| Н.Э.Баумана, 1998, с.50 | |||
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНЫМ ВОЛНОВЫМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194249C1 |
| RU | |||

