Изобретение относится к системе автоматического управления посадкой беспилотных летательных аппаратов (БЛА) в случае действия значительных ветровых возмущений во время снижения по глиссаде.
Наиболее близким к данному изобретению является способ [1], базирующийся на следующих положениях:
1. Система управления посадкой при сильном боковом ветре формирует сигналы управления движением летательного аппарата (ЛА) на различных режимах.
2. Сформированные сигналы управления подаются на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления.
3. В системе управления посадкой используются линейные регуляторы при неизменных задающих воздействиях, определяющих единственный режим снижения по заданной глиссаде вплоть до точки приземления.
4. Для совпадения путевой скорости с заданной линией пути курсовой угол ЛА разворачивают в направлении навстречу ветру и обеспечивают разницу между курсовым углом и углом пути, равную нулю.
В этом случае в точке приземления боковая скорость ЛА равна нулю, но плоскость качения колес шасси не совпадает с направлением путевой скорости ЛА, и возникает угол увода колес пневматики шасси, равный углу ветра, что представляет опасность аварийного приземления и пробега по земле после посадки.
В итоге в точке приземления всегда присутствует либо повышенная боковая, либо вертикальная скорости, которые тем опаснее, чем больше окажется угол ветра.
В случае автоматического управления БЛА, указанные недостатки повторяются, тем более, что всегда применяется однорежимное управление посадкой при заданных один раз путевом угле (посадочном курсе) и угле наклона траектории при снижении по глиссаде, начиная с заданной высоты горизонтального полета.
Недостатком известного способа является неучет влияния скорости и направления ветра на качество выполнения посадки.
Задачей изобретения является обеспечение требуемого качества процессов управления в системе автоматического управления БЛА на участке снижения по глиссаде при посадке при наличии сильного ветрового возмущения для повышения безопасности выполнения посадки.
Технический результат достигается тем, что система автоматического управления по крену и курсу БЛА при посадке содержит последовательно соединенные привод управления элеронами и БЛА, второй вход которого подключен к выходу привода управления рулем направления, в систему дополнительно введены идентификатор бокового ветра, формирователь задающих воздействий, переключатель адаптивных задающих воздействий, переключатель передаточных чисел, адаптивный регулятор управления элеронами и адаптивный регулятор управления рулем направления; причем первый, второй, третий, четвертый и пятый выходы переключателя передаточных чисел соединены с соответствующими входами адаптивного регулятора управления элеронами, а его шестой, седьмой, восьмой и девятый выходы - с первым, вторым, третьим и четвертым входами адаптивного регулятора управления рулем направления соответственно; первый, второй и третий выходы БЛА соединены соответственно с шестым, седьмым и восьмым входами адаптивного регулятора управления элеронами и соответствующими входами идентификатора бокового ветра, выход которого через последовательно соединенные формирователь задающих воздействий, переключатель адаптивных задающих воздействий и адаптивный регулятор управления элеронами подключен к входу привода управления элеронами; четвертый выход БЛА соединен с десятым входом адаптивного регулятора управления элеронами и пятым входом адаптивного регулятора управления рулем направления; пятый выход БЛА - с четвертым входом идентификатора бокового ветра и с шестым входом адаптивного регулятора управления рулем направления, шестой выход БЛА - со вторым входом формирователя задающих воздействий и седьмым входом адаптивного регулятора управления рулем направления, седьмой выход БЛА - с четвертым входом переключателя адаптивных задающих воздействий и первым входом переключателя передаточных чисел, восьмой выход БЛА - с седьмым входом адаптивного регулятора управления рулем направления; первый, второй и третий выходы формирователя задающих воздействий соединены соответственно с первым, вторым и третьим входами переключателя адаптивных задающих воздействий.
Сущность изобретения поясняется приведенным ниже описанием, фигурами 1-19.
Данное изобретение предназначено для устранения опасности с помощью новой системы многорежимного управления автоматической посадкой, реализующей третий вариант движения, принципиально отличающийся от двух предыдущих использованием идентификатора бокового ветра, формирователя задающих воздействий, переключателя адаптивных задающих воздействий, адаптивного регулятора управления элеронами, адаптивного регулятора управления рулем направления, для выполнения следующего маневра:
- при снижении по глиссаде самолет движется не все время по заданной линии пути, а осуществляет отход от нее в сторону, попутную ветру, а не навстречу, с последующим возвращением на линию пути в конце снижения в нужное время. Поэтому именно при окончательном возвращении движение навстречу ветру создается принципиальная возможность одновременного выравнивания путевого и курсового углов в точке приземления при отсутствии крена;
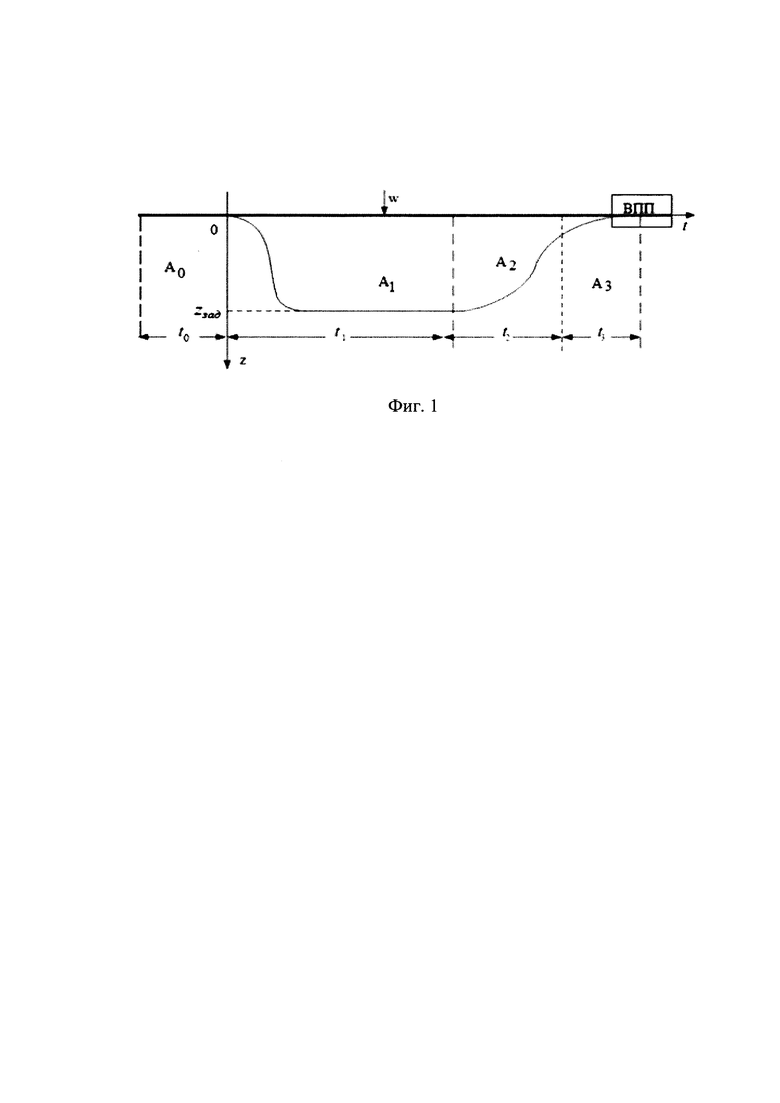
- для обеспечения предложенного маневра повышенной сложности используется многорежимное управление посадкой, состоящей из четырех участков, как показано на фигуре 1: это участок А0 - обычного снижения по глиссаде, A1 - расчетного отклонения от заданной линии пути навстречу ветру, А2 - возвращения к линии пути при управлении по крену, А3 - выравнивания путевого и курсового углов при управлении рулем направления, отсутствии угла крена и выходе на заданную линию пути;
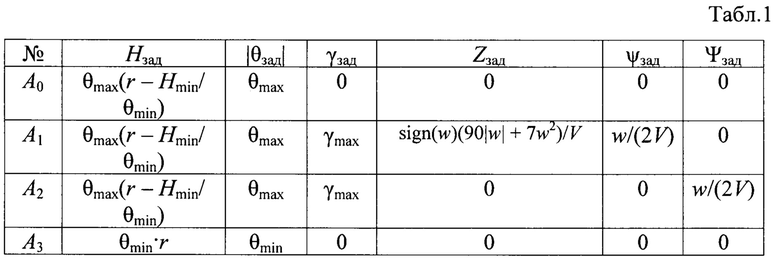
- для каждого из четырех участков используются свои задающие воздействия для управления боковым движением, часть которых вычисляется в полете как функция скорости бокового ветра W, как показано в таблице 1 во всех столбцах, кроме первого, в котором указаны также назначаемые в полете значения высоты, при которых происходит переключение режимов управления.
Для этой цели в систему управления введены блоки формирования задающих воздействий и переключения режимов. Для получения нужных задающих воздействий, величина бокового ветра W определяется с помощью бортового идентификатора, формирующего нужную оценку при анализе бокового сноса самолета под действием бокового ветра.
Таким образом, отличие предложенной системы управления состоит в использовании идентификатора бокового ветра, блока формирования задающих воздействий для четырех участков посадки, блока переключения режимов бокового маневра и двух билинейных регуляторов управления элеронами и рулем высоты.
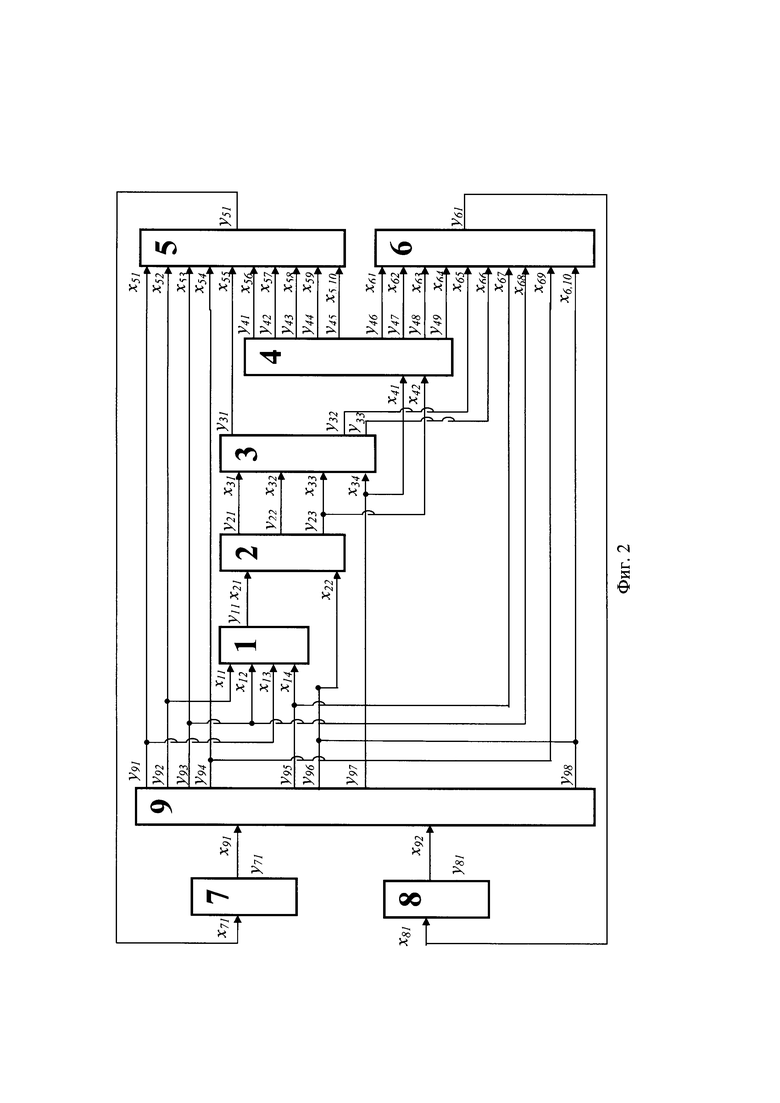
Блок-схема системы многорежимного управления посадкой показана на фигуре 2, на которой приняты следующие обозначения:
1 - идентификатор бокового ветра;
2 - формирователь задающих воздействий;
3 - переключатель адаптивных задающих воздействий;
4 - переключатель передаточных чисел;
5 - адаптивный регулятор управления элеронами;
6 - адаптивный регулятор управления рулем направления;
7 - привод управления элеронами;
8 - привод управления рулем направления;
9 - самолет.
На схеме (фиг. 2) представлены 9 блоков и связи между ними. При этом блоки 1-6 являются новыми, а блоки 7-9 - известными. Указываются обозначения всех сигналов на входе и выходе блоков:
1. Блок 9 - самолет и бесплатформенная инерциальная навигационная система (БИНС):
x91=у71=δэ - угол отклонения элеронов;
x92=у81=δрн - угол отклонения руля направления;
y91=x51=ωx - угловая скорость крена;
y92=х52=γ - угол крена;
y93=x53=х12=х67=Ψ - угол пути;
y94=х54=х11=х68=Z - боковое отклонение от линии заданного пути;
y95=х14=x66=ψ - угол курса;
y96=x15=x22=V - воздушная скорость;
y97=x34=x41=Н - высота полета;
y98=x69=ωу - угловая скорость рыскания.
2. Блок 1 - идентификатор бокового ветра:
y11=x21=w - оценка скорости бокового ветра.
3. Блок 2 - формирования задающих воздействий:
y21=х31=m1=w/V;
y22=x32=m2=sign(w)(90|w|+7w2)/V;
y23=x33=m3=w⋅V.
4. Блок 3 - адаптивного переключения задающих воздействий:
y31=x55=Zзад - заданная величина бокового отклонения;
y32=y33=x65=ψзад=Ψзад=0,5w/V - заданный угол пути, равный заданному курсовому углу.
5. Блок 4 - адаптивного переключения передаточных чисел:
y41=x56=k11,
y42=x57=k12,
y43=x58=k13,
y44=x59=k14,
y45=x5,10=γзад,
y46=x61=k21,
y47=x62=k22,
y48=x63=k23,
y49=x64=k24.
6. Адаптивный регулятор 5 управления элеронами:
y51=u1=-x56⋅x51-x57⋅x53-x58⋅x52-x59(x54-x55)=-k11⋅ωx-k12Ψ-k13γ-k14(Z-Zзад).
7. Адаптивный регулятор 6 управления рулем направления:
y61=u2=-x61(x66-x65)-x62(x67-x65)_x63⋅x68_x64⋅x69=-k21(ψ-ψзад)-k22(Ψ-Ψзад)-k23⋅Z-k24⋅ωy.
8. Рулевой привод 7 управления элеронами:
x71=y51 - входной сигнал с выхода регулятора 5;
y71 - выходной сигнал рулевого привода 7.
9. Рулевой привод 8 управления рулем направления:
x81=y61 - входной сигнал с выхода регулятора 6;
y81 - выходной сигнал рулевого привода 8.
Предложенная система обеспечивает:
- принципиальную возможность одновременного обнуления в момент приземления боковой и вертикальной скорости при отсутствии крена, что гарантирует нужный запас прочности стоек шасси;
- сведение к минимуму угла увода колес шасси, что исключает опасность аварийного разрыва пневматиков колес шасси и сокращает скорость их износа;
- полную автоматизацию выполнения многорежимного бокового маневра.
Система автоматического управления по крену и курсу БЛА при посадке позволяет существенно повысить безопасность приземления при сильном боковом ветре.
Система автоматического управления по крену и курсу БЛА при посадке включают в себя следующие новые блоки:
1. Идентификатор бокового ветра.
В настоящее время в беспилотной авиации этот идентификатор на борту ЛА отсутствует.
В данном изобретении предлагается идентификатор, не использующий спутниковую навигацию и основанный на модификации фильтра Калмана, но с постоянными коэффициентами. На его вход поступают следующие сигналы с выхода измерительной системы:
x11=γ; x12=ωу; x13=Ψ; x14=ψ; x15=ωx.
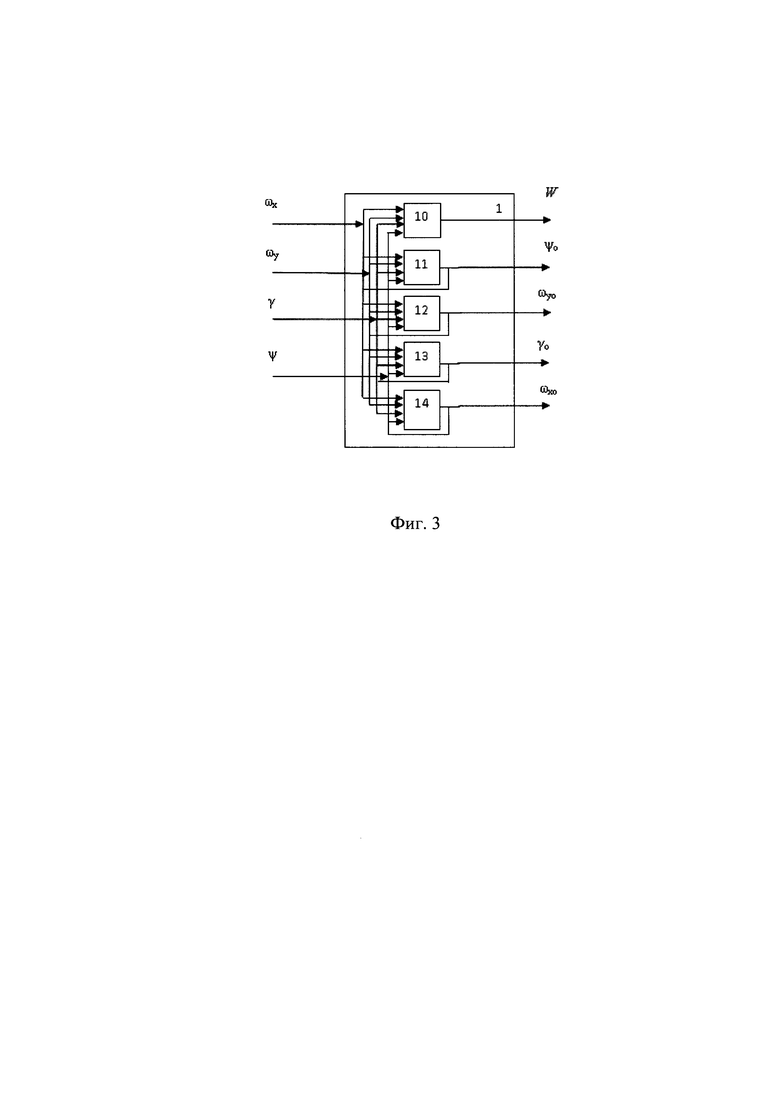
общая блок-схема идентификатора представлена на фигуре 3.
На первый вход блока 1 поступает сигнал ωх, на второй вход - сигнал ωу, на третий вход - сигнал γ, на четвертый вход - сигнал ψ. На первом выходе идентификатора 1 появляется оценка скорости ветра W.
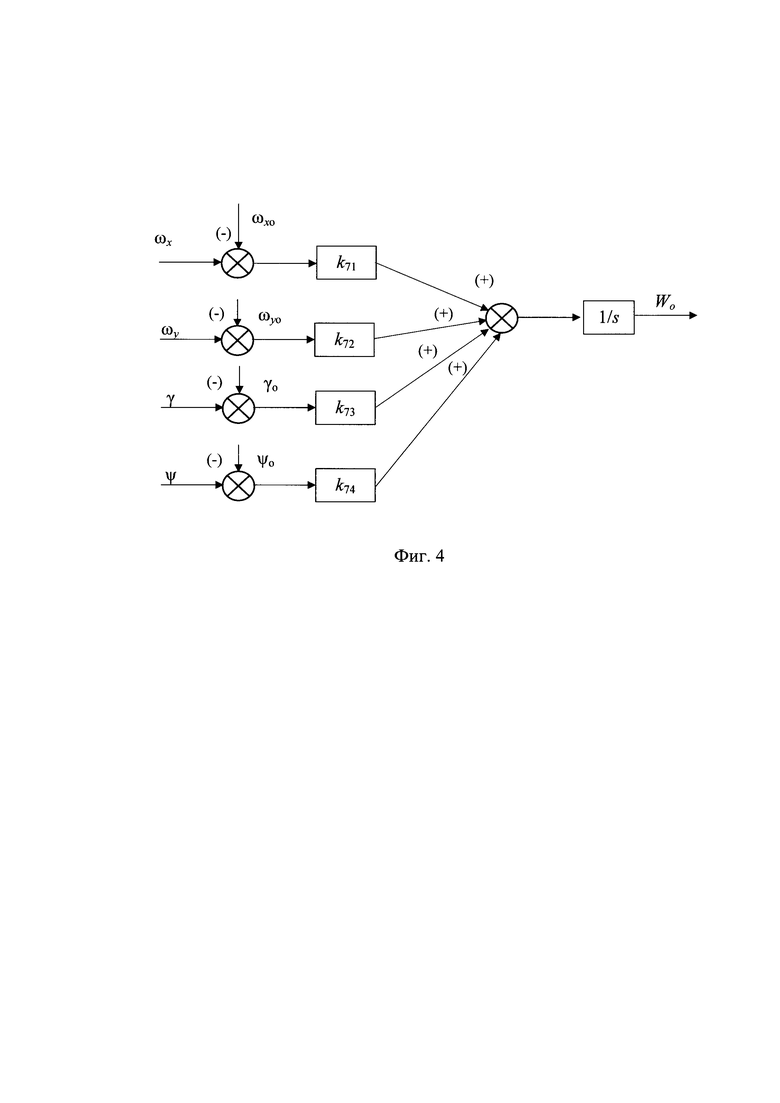
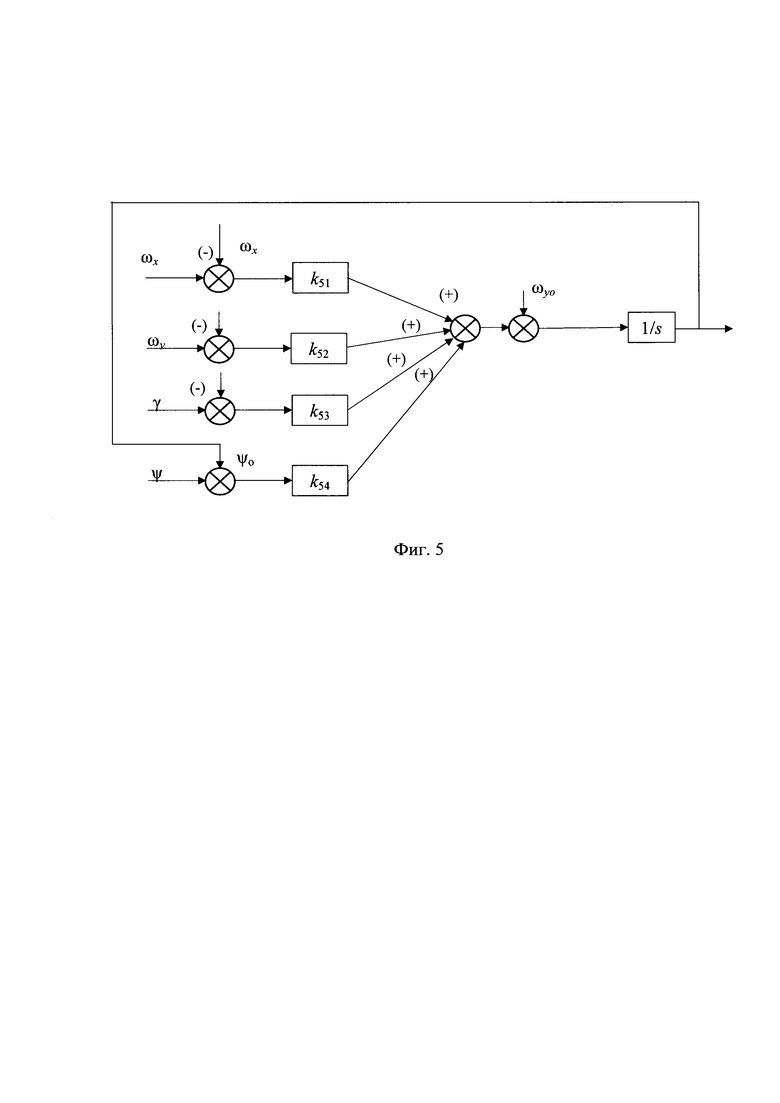
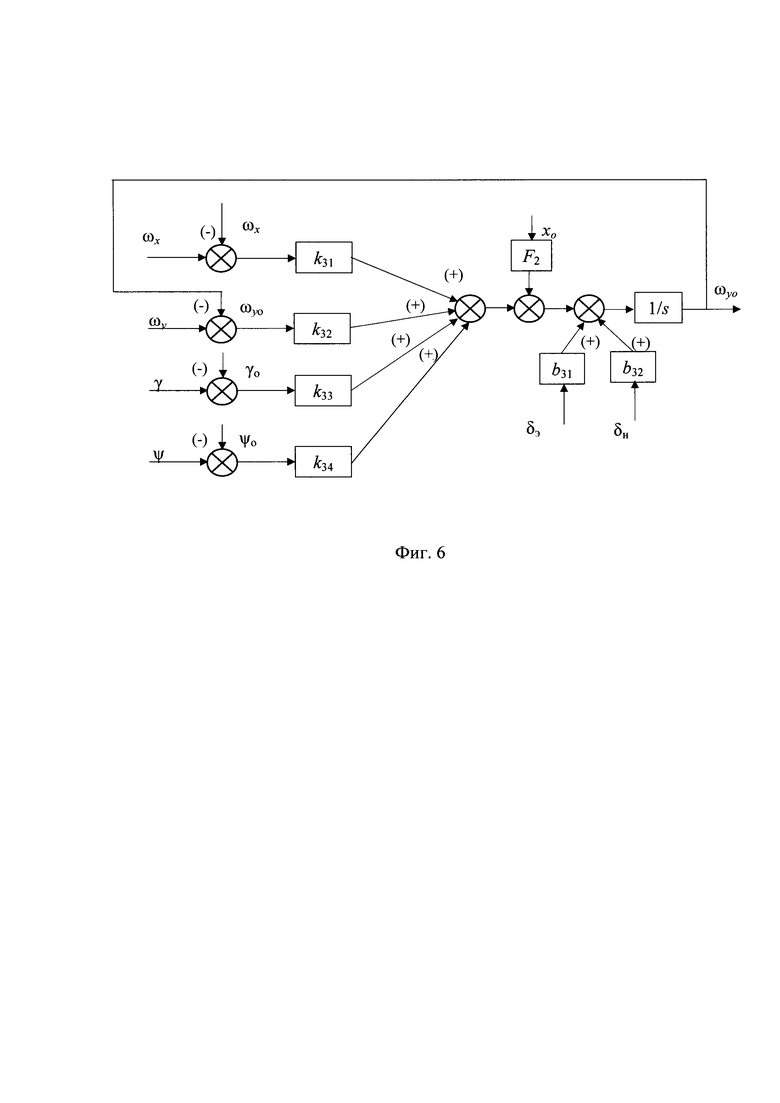
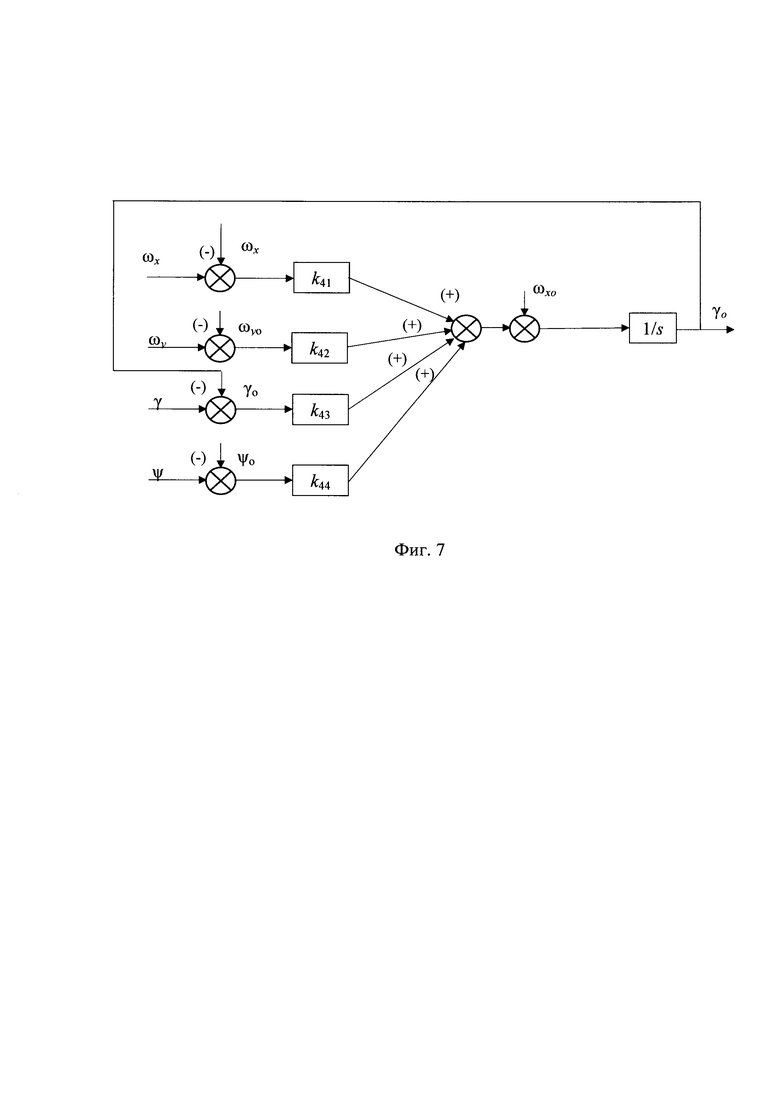
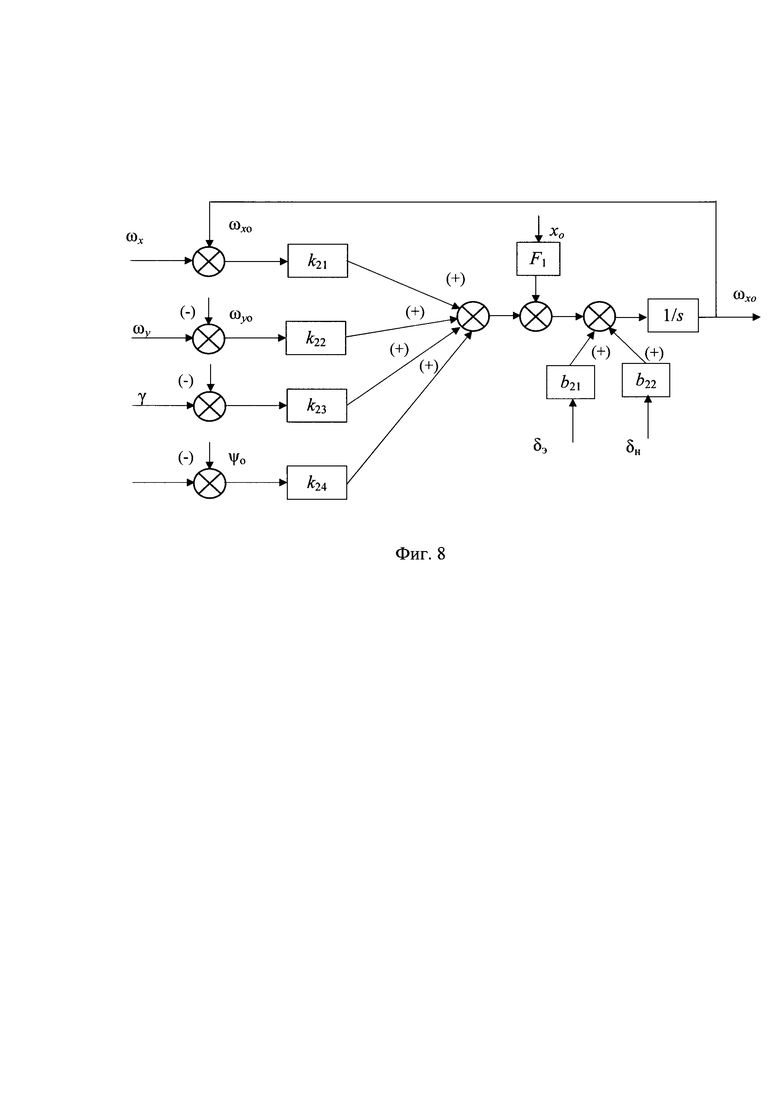
На фигуре 4 представлена схема блока 10 идентификатора, на фигуре 5 - схема блока 11, на фигуре 6 - схема блока 12, на фигуре 7 - схема блока 13, на фигуре 8 - схема блока 14. На выходе получается оценка скорости бокового ветра y11=Wo.
Таким образом, идентификатор 1 содержит 5 интеграторов, охваченных отрицательными обратными связями с постоянными («замороженными») коэффициентами.
2. Формирователь 2 задающих воздействий.
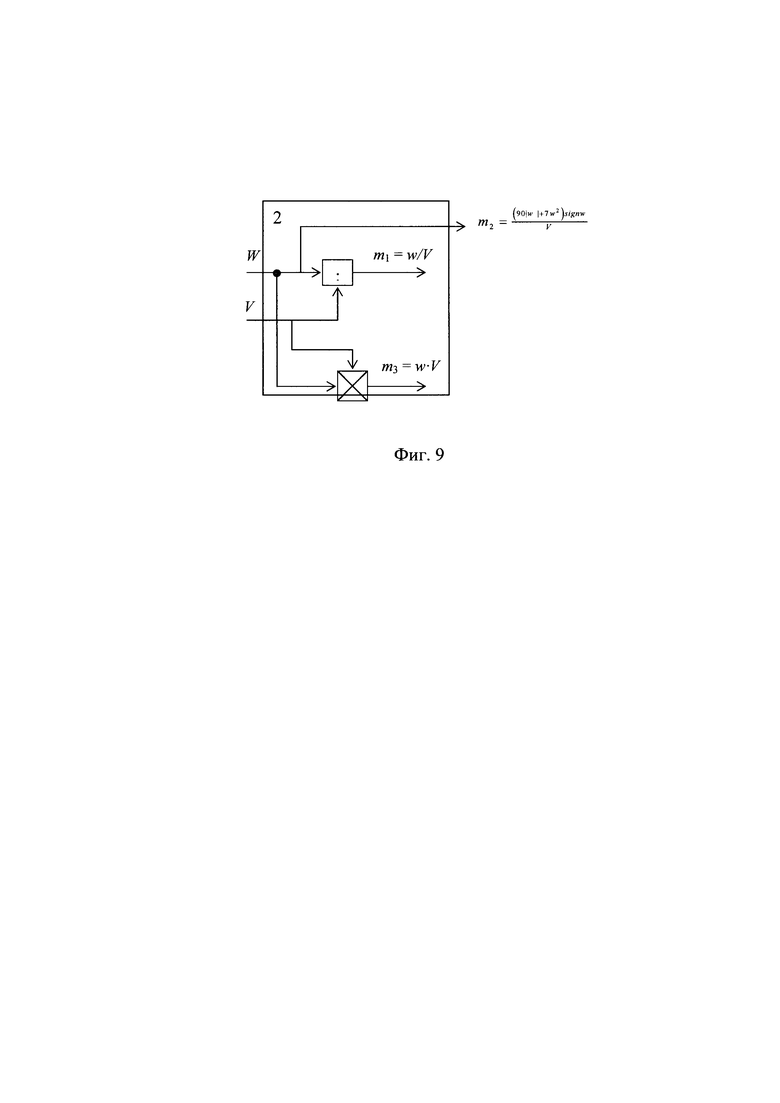
Блок-схема формирователя 2 представлена на фигуре 9.
На первый вход формирователя 2 поступает сигнал W, на второй вход - сигнал V. На первом выходе появляется сигнал m1, на втором выходе - сигнал m2, на третьем выходе - сигнал m3.
Первая оценка m1 есть угол ветра, пропорционально которому в дальнейшем определяются заданный курсовой угол ψзад на участке А1 бокового маневра и угол пути Ψзад на участке А2 возвращения на заданную линию пути. Главным задающим воздействием является параметр Zзад=m2 начального отклонения ЛА от линии пути, растущего при увеличении значения ветра w, чтобы иметь большее время для создания нужной боковой путевой скорости ЛА навстречу ветру или возвращения на заданную линию пути. Параметр m3 - это значение, определяющее минимальную высоту, при достижении которой начинается возвращение самолета на заданную линию пути в точке приземления.
3. Переключатель 4 передаточных чисел.
Основу этого блока представляет ряд устройств, которые позволяют назначать для каждого из 4 участков бокового маневра свою группу передаточных чисел для двух регуляторов управления элеронами и рулем направления (для первого регулятора - 5 передаточных чисел, для второго - 4, итого - 9 кусочно-постоянных функций времени). Поэтому сам переключатель состоит из 9 таких устройств, каждое из которых имеет 4 выхода по числу участков маневрирования.
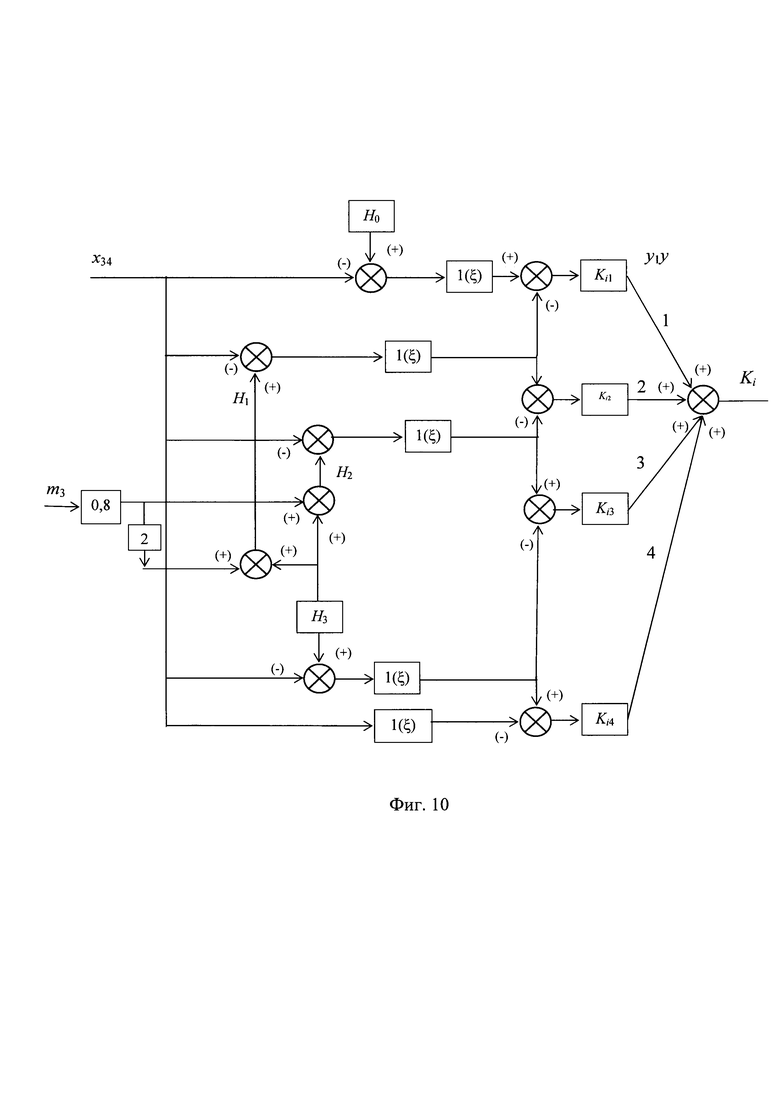
Блок-схема такого устройства, называемого в дальнейшем «программируемым одновибратором» представлена на фигуре 10.
Согласно блок-схеме текущее значение высоты полета при сближении по глиссаде сравнивается с 4 контрольными значениями высоты Н0, Н1, Н2, Н3, два из которых Н1 и Н2 зависят от параметра m3 блока 2.
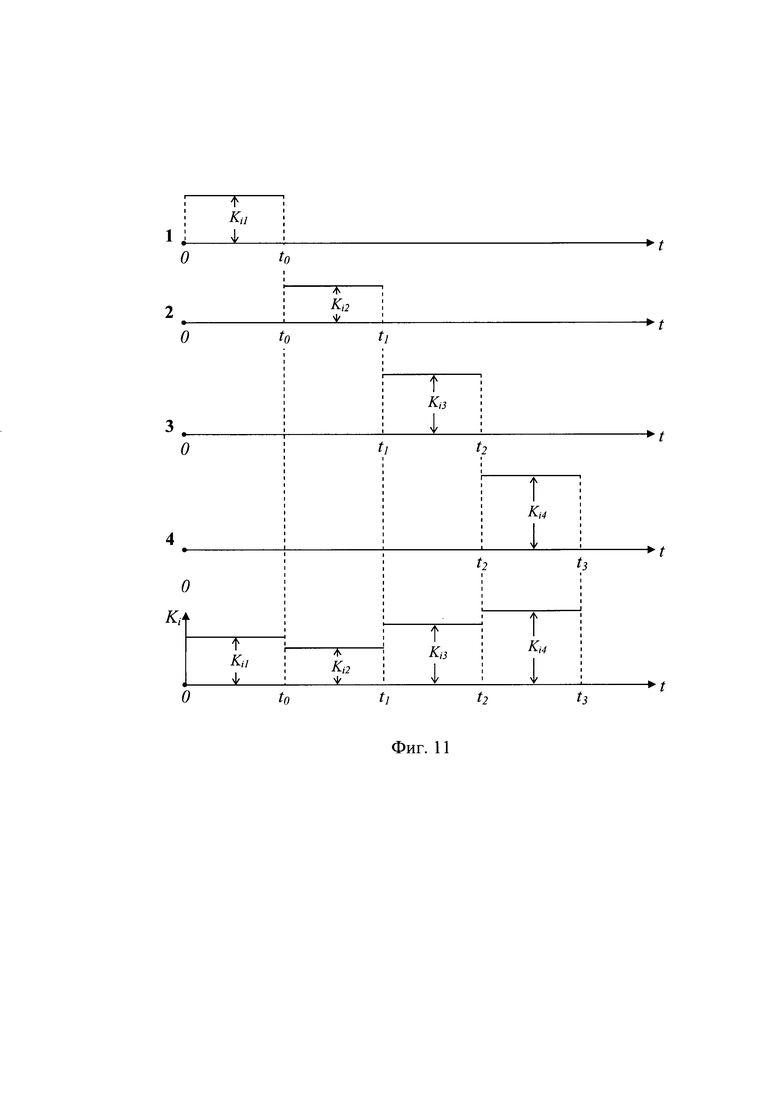
Затем формируемые разности Y1-H0, Y1-H1, Y1-H2, Y1-H3, попадают на вход своих формирователей единичных функций Дирака 1(ξ), в результате чего значение 1 возникает в любой момент времени только на одном из 4 выходов переключателя 4. Поэтому после умножения каждого j-го сигнала на нужное передаточное число kij (i - номер передаточного числа, j - номер режима или участка полета) и суммирования полученных результатов, получаем нужное i-e передаточное число в виде ступенчатой функции kki(t).
Циклограмма поведения внутренних сигналов 1, 2, 3, 4 для коэффициентов ki1, ki2, ki3, ki4 и общего передаточного числа ki представлена на фигуре 11.
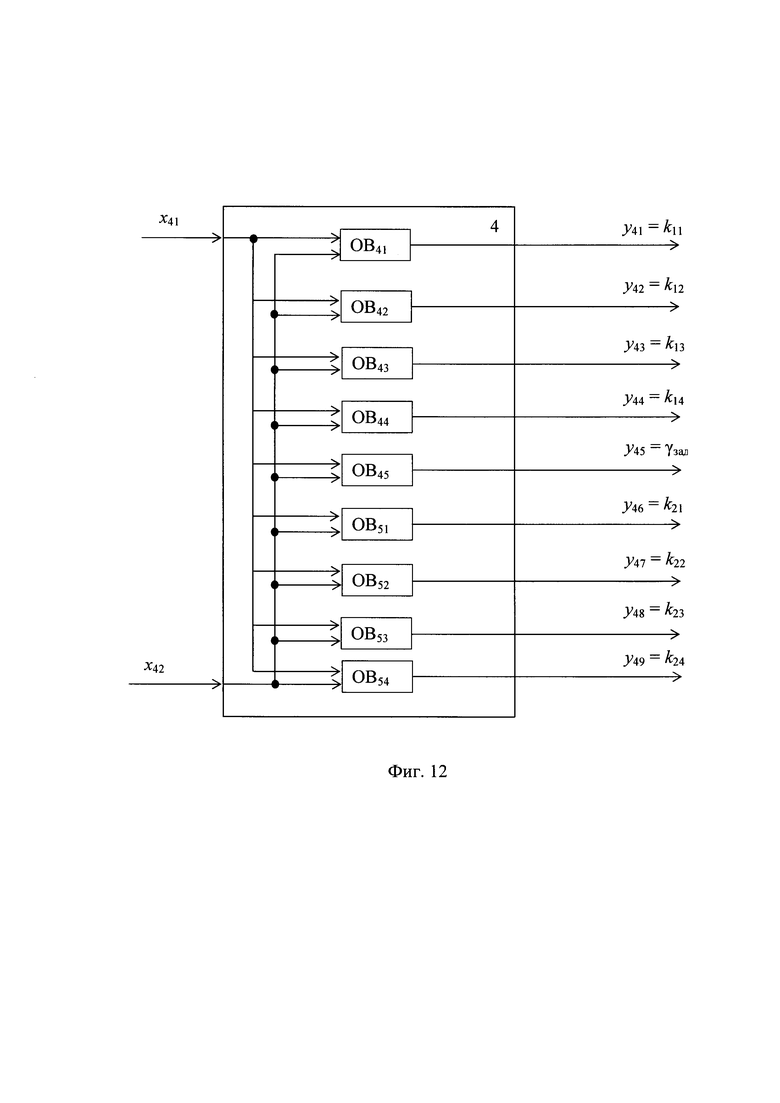
Общая блок-схема переключателя, содержащая 9 программируемых одновибраторов, представлена на фигуре 12.
На первый вход переключателя 4 поступает сигнал х41, на второй вход - сигнал х42.
На первом выходе переключателя 4 появляется сигнал у41, на втором выходе - y42, на третьем выходе - у43, на четвертом выходе - у44, на пятом выходе - у45, на шестом выходе - у46, на седьмом выходе - у47, на восьмом выходе - y48, на девятом выходе - y49.
При этом выходные сигналы этого блока используются в двух регуляторах:
k11, k12, k13, k14, γзад - для регулятора 5,
k21, k22, k23, k24 - для регулятора 6.
Необходимо подчеркнуть, что причину переключения самих передаточных чисел можно объяснить тем, что на участках А0 и А1 более подходящим является режим плавного, линейного регулирования, а на этапе возвращения к линии пути на участках А2 и А3 - режим близкий к релейному «экстренному» управлению. Причем по аналогии с релейным управлением А2 - это участок «разгона», а А3 - участок «торможения».
Также заметим, что переключатель 4 имеет 9 выходов и два входа - для сигнала m3, равного х42, адаптивно зависящего от ветра W, и сигнала х41, равного высоте полета Н.
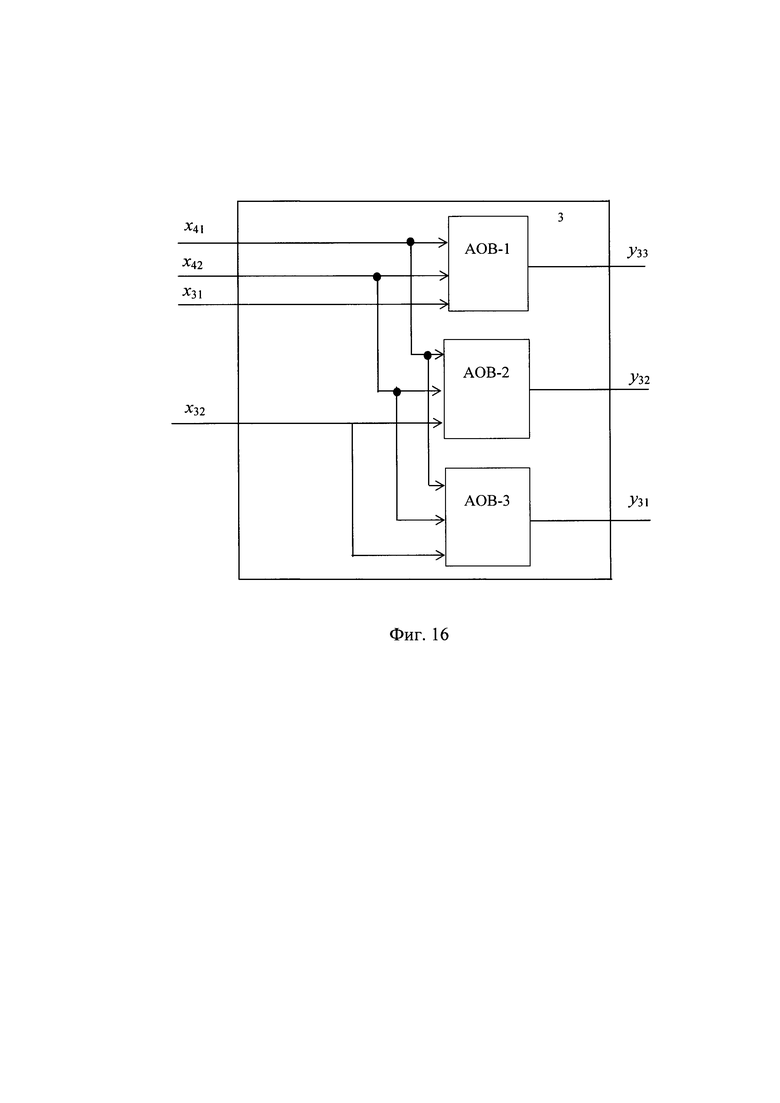
4. Переключатель 3 адаптивных задающих воздействий.
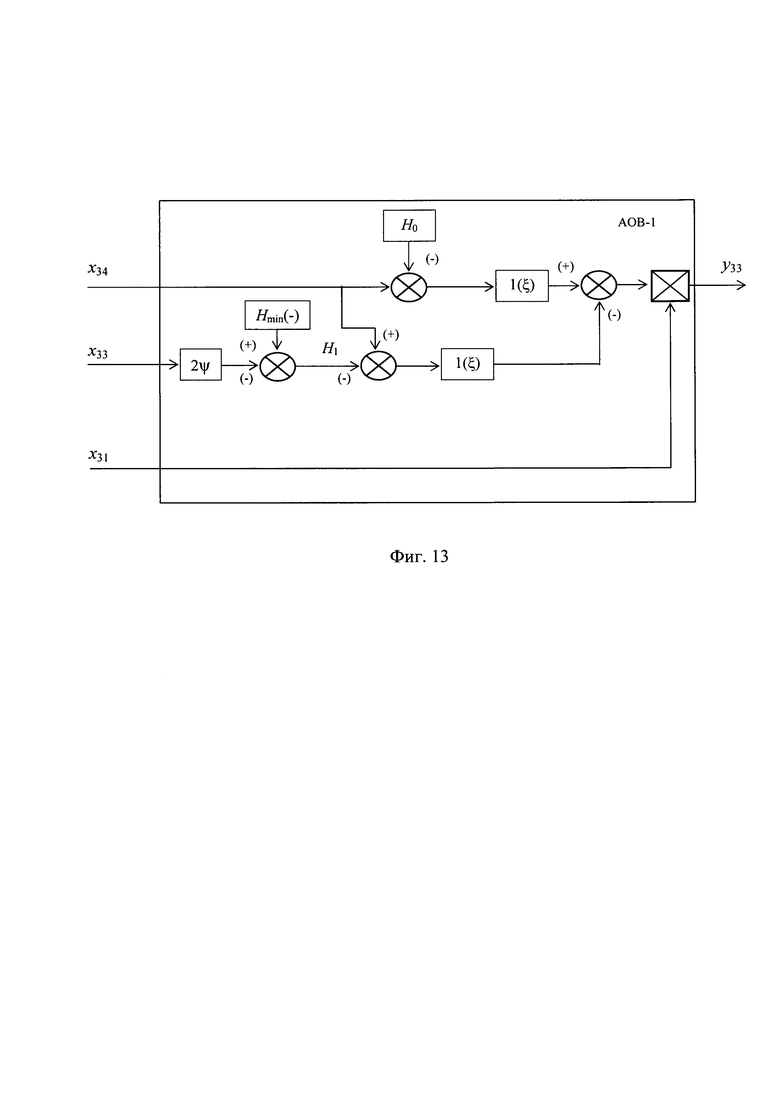
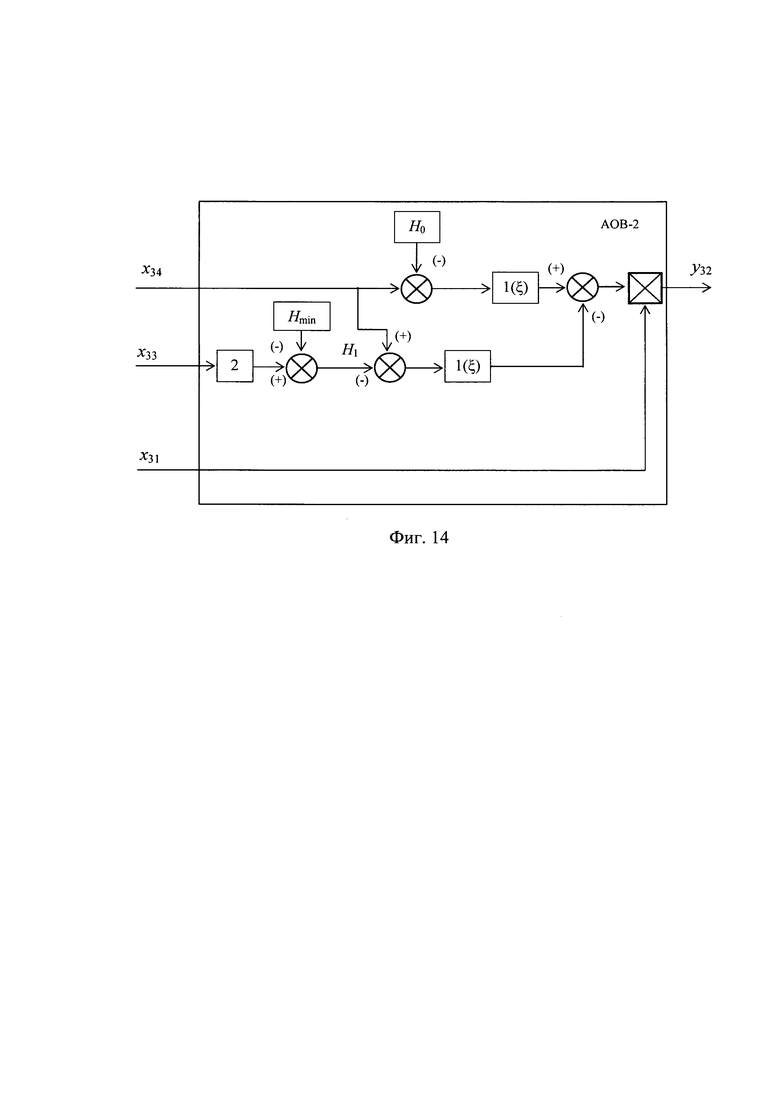
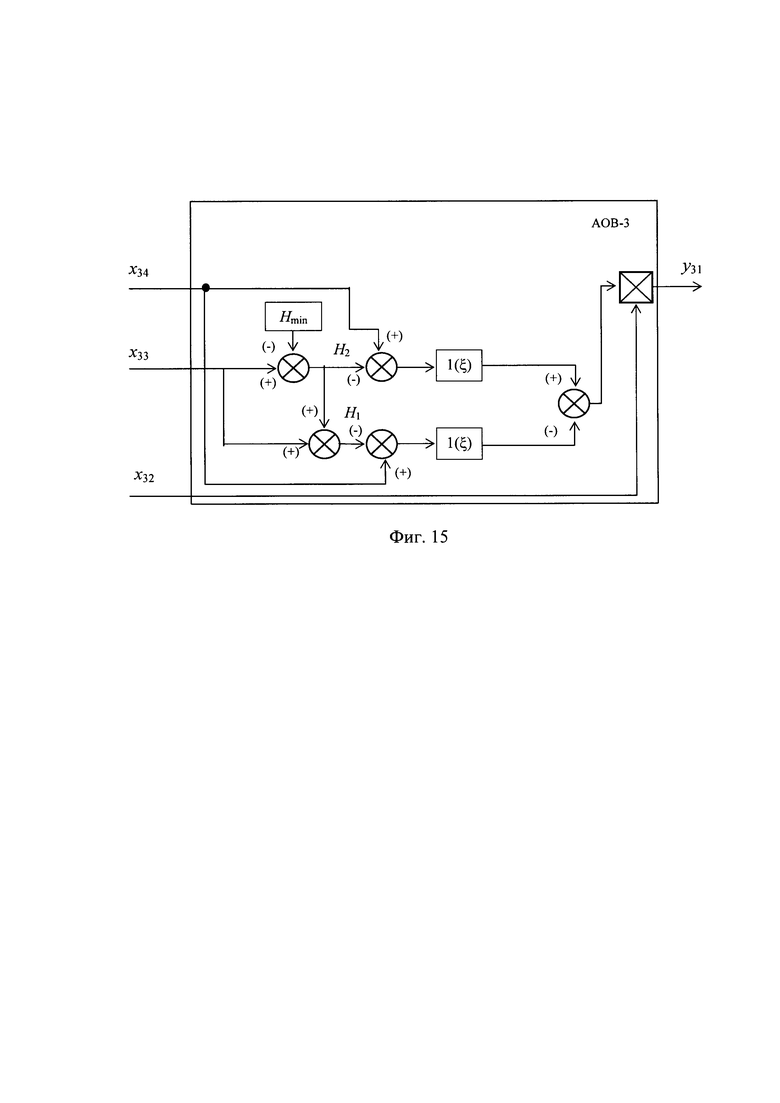
Функциональное отличие этого блока от блока 4 состоит в том, что в нем используются более сложные логические одновибраторы, когда в качестве множителя в одном из выходов используются не постоянные числа, а функции от параметров m1 и m2 блока 2, зависящих в свою очередь от значения ветра w. Назовем такие устройства «адаптивным мультивибратором». Их всего три, и они представлены на фигурах 13-15, а их объединение образует переключатель 3, представленный на фигуре 16. На фигуре 13 представлена схема адаптивного одновибратора АОВ-1 для определения у33=Ψзад, на фигуре 14 - схема адаптивного одновибратора АОВ-2 для определения ψзад=у32, на фигуре 15 - схема адаптивного одновибратора АОВ-3 для определения Zзaд=у31.
На первый вход переключателя 3 поступает сигнал х31, на третий вход переключателя 3 - сигнал х33, на четвертый вход переключателя 3 - сигнал х34. На входы переключателя 3 поступают сигналы х31, х32, х42, х41. На выходах переключателя 3 появляются сигналы у31, y32, y33.
Объединение этих блоков образует в целом переключатель 3, как показано на фигуре 16.
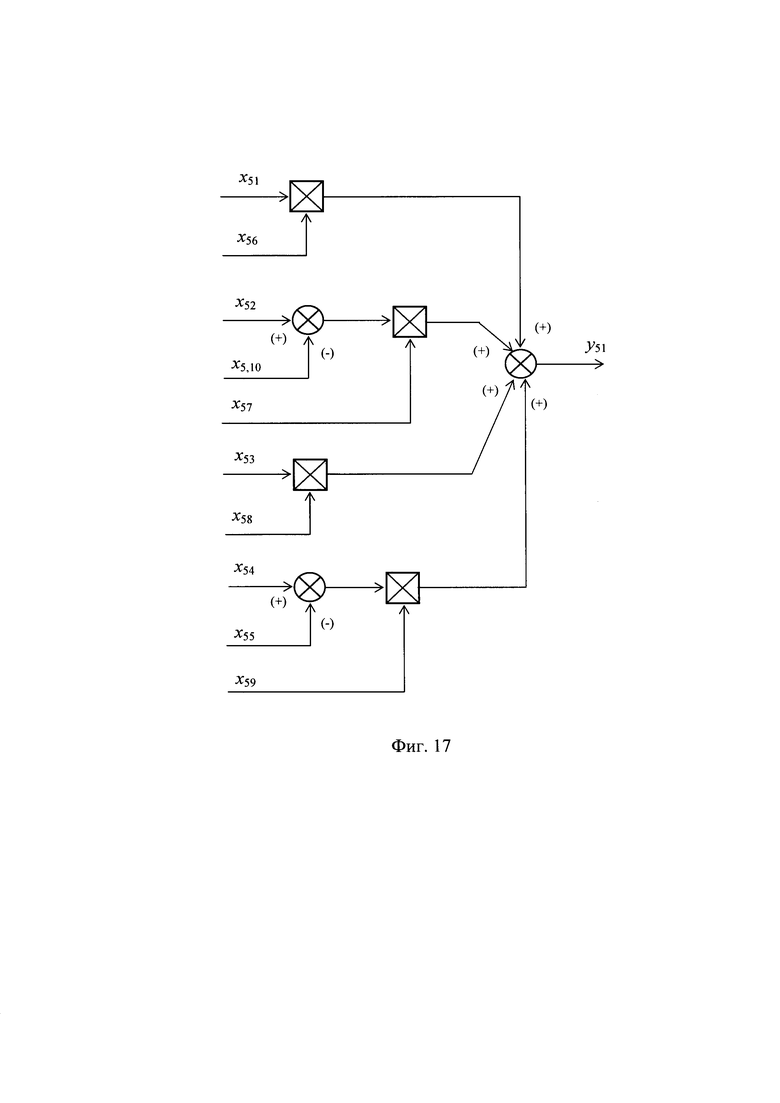
5. Адаптивный регулятор 5 управления элеронами и адаптивный регулятор 6 управления рулем направления.
На фигуре 17 и фигуре 18 представлены известные блок-схемы соответствующих адаптивных регуляторов 5 и 6 управления, линейных по отношению к входным сигналам, но с тем отличием, что их передаточные числа являются кусочно-постоянными функциями времени. Поведение этих функций в свою очередь зависит от условий посадки, а именно - от значения W бокового ветра и скорости полета V.
На первый вход адаптивного регулятора 5 поступает сигнал х56, на второй вход адаптивного регулятора 5 - сигнал х57, на третий вход адаптивного регулятора 5 - сигнал х58, на четвертый вход - сигнал х59, на пятый вход - сигнал х5,10, на шестой вход - сигнал х51, на седьмой вход - сигнал х52, на восьмой вход - сигнал х53, на девятый вход - сигнал х55, на десятый вход - сигнал х54.
Сигнал y51 появляется на первом выходе адаптивного регулятора 5.
Из фигуры 17 видно, что передаточные числа х57, х58 и х59, подаваемые на вход блоков умножения и являющиеся кусочно-постоянными функциями времени, обеспечивают адаптивность работы регулятора 5 в зависимости от условий посадки.
На первый вход адаптивного регулятора 6 поступает сигнал х61, на второй вход адаптивного регулятора 6 - сигнал х62, на третий вход адаптивного регулятора 6 - сигнал х63, на четвертый вход - сигнал х64, на пятый вход - сигнал х69, на шестой вход - сигнал х67, на седьмой вход - сигнал х65, на восьмой вход - сигнал х68, на девятый вход - сигнал х66, на десятый вход - сигнал x6,10.
Сигнал у61 появляется на первом выходе адаптивного регулятора 6.
Из фигуры 18 также видно, что передаточные числа x61-x65, подаваемые на вход блоков умножения и являющиеся кусочно-постоянными функциями времени, обеспечивают адаптивность работы регулятора 6 в зависимости от условий посадки. Таким образом, показанные на фигуре 17 и фигуре 18 схемы реализуют адаптивные регуляторы со ступенчатыми передаточными числами.
Моделирование процесса автоматической посадки легкого БЛА самолетного типа проводилось при действии бокового ветра со скоростью в диапазоне 6-10 м/с при скорости самого БЛА в диапазоне 30-40 м/с. Оказалось, что при начале управления по крену после появления ветра в момент снижения по глиссаде с высоты H0=40 м, в момент приземления как углы пути и курса, так и отклонение от середины взлетно-посадочной полосы (ВПП), близки к нулю, что позволяет совершить безопасную посадку при отсутствии чрезмерных нагрузок на шасси (см. фиг. 19).
Результаты моделирования процесса посадки БЛА представлены на фигуре 19: а - боковое отклонение от линии ВПП, м, б - угол курса (1) и угол пути (2), град, в - угол крена, град, г - боковая скорость, м/с. При этом момент приземления происходит при t=20 с.
Также проведено моделирование влияния постоянного бокового ветра вместе с турбулентной составляющей при посадке БЛА. В результате удалось выяснить, что при точном попадании в середину ВПП отклонения в точке приземления БЛА по углам курса и пути не превышают одного градуса, что в целом подтверждает высокую эффективность предложенного подхода.
Источники информации
1. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| Способ автоматического управления продольным движением беспилотного летательного аппарата при наличии ветрового возмущения | 2022 |
|
RU2784884C1 |
| Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления | 2016 |
|
RU2631736C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |


Система автоматического управления по крену и курсу беспилотного летательного аппарата (БЛА) при посадке содержит привод управления элеронами, привод управления рулем направления, идентификатор бокового ветра, формирователь задающих воздействий, переключатель адаптивных задающих воздействий, переключатель передаточных чисел, адаптивный регулятор управления элеронами, адаптивный регулятор управления рулем направления, соединенные определенным образом. Обеспечивается безопасность выполнения посадки при наличии сильного ветра. 19 ил., 1 табл.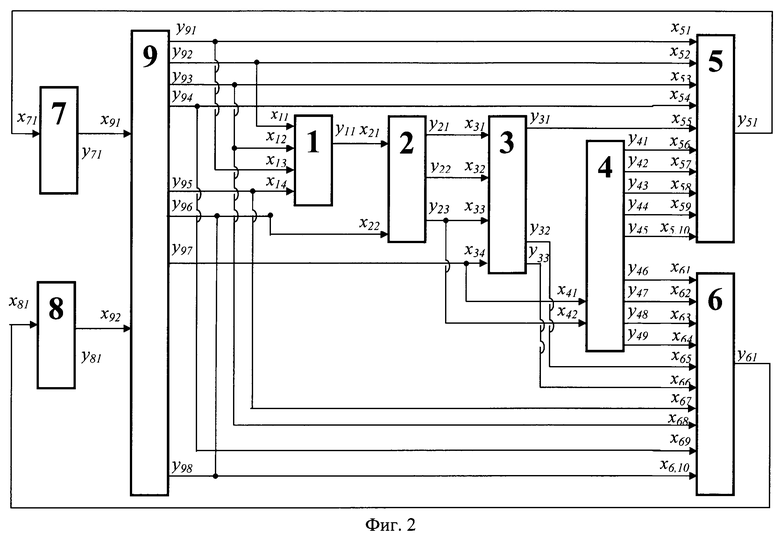
Система автоматического управления по крену и курсу беспилотного летательного аппарата (БЛА) при посадке, заключающаяся в том, что содержит последовательно соединенные привод управления элеронами БЛА, второй вход которого подключен к выходу привода управления рулем направления, отличающаяся тем, что в систему дополнительно введены идентификатор бокового ветра, формирователь задающих воздействий, переключатель адаптивных задающих воздействий, переключатель передаточных чисел, адаптивный регулятор управления элеронами и адаптивный регулятор управления рулем направления; причем первый, второй, третий, четвертый и пятый выходы переключателя передаточных чисел соединены с соответствующими входами адаптивного регулятора управления элеронами, а его шестой, седьмой, восьмой и девятый выходы - с первым, вторым, третьим и четвертым входами адаптивного регулятора управления рулем направления соответственно; первый, второй и третий выходы БЛА соединены соответственно с шестым, седьмым и восьмым входами адаптивного регулятора управления элеронами и соответствующими входами идентификатора бокового ветра, выход которого через последовательно соединенные формирователь задающих воздействий, переключатель адаптивных задающих воздействий и адаптивный регулятор управления элеронами подключен к входу привода управления элеронами; четвертый выход БЛА соединен с десятым входом адаптивного регулятора управления элеронами и пятым входом адаптивного регулятора управления рулем направления; пятый выход БЛА - с четвертым входом идентификатора бокового ветра и с шестым входом адаптивного регулятора управления рулем направления, шестой выход БЛА - со вторым входом формирователя задающих воздействий и седьмым входом адаптивного регулятора управления рулем направления, седьмой выход БЛА - с четвертым входом переключателя адаптивных задающих воздействий и первым входом переключателя передаточных чисел, восьмой выход БЛА - с седьмым входом адаптивного регулятора управления рулем направления; первый, второй и третий выходы формирователя задающих воздействий соединены соответственно с первым, вторым и третьим входами переключателя адаптивных задающих воздействий.
| ОБЪЕМНЫЙ РАСХОДОМЕР ЖИДКОСТИ ИЛИ ГАЗА | 0 |
|
SU164139A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| CN 103116359 A, 22.05.2013 | |||
| CN 111123967 A, 08.05.2020 | |||
| CN 108319284 A, 24.07.2018. | |||

